
DCS Applications
13
Distributed Control System (DCS) 1. Pengertian DCS Distributed Control System merupakan suatu sistem yang mendistribusikan berbagai fungsi yang digunakan untuk mengendalikan berbagai variabel proses dan unit operasi proses menjadi suatu pengendalian yang terpusat pada suatu control room dengan berbagai fungsi pengendalian, monitoring dan optimasi[1]. Distributed control system (DCS) adalah sebuah system kontrol yang biasanya digunakan pada sistem manufacturing atau proses, dimana elemen controller tidak berada pada sentral sistem (sebagai pusat) tetapi tersebar di sistem dengan komponen subsistem di bawah kendali satu atau lebih controller. Keseluruhan sistem dapat menjadi sebuah jaringan untuk komunikasi dan monitoring. Distributed control system (DCS) digunakan dalam industri untuk memonitor dan mengontrol peralatan yang tersebar dengan atau tanpa campur tangan manusia. Sebuah DCS biasanya menggunakan komputer sebagai controller dan menggunakan propietary interconections dan protokol untuk komunikasi. Modul input dan output membentuk part komponen untuk DCS, Prosesor menerima informasi dari modul input dan mengirim informasi ke modul output. Modul input menerima informasi dari instrumentasi input dalam sistem dan modul output mengirim ke instrumen output pada sistem. Bus komputer atau bus elektrikal menghubungkan prosessor dengan modul melalui multiplexer atau demultiplexer. Mereka juga menghubungkan kontroller yang tersebar dengan sentral kontroller dan akhirnya terhubung ke Human machine Interface (HMI) atau panel kontrol. DCS adalah sebuah istilah yang sangat luas yang menggambarkan sebuah solusi untuk industri yang sangat variatif, termasuk di dalamnya adalah : • Electrical power grids dan electrical generation plants • Environmental control systems • Traffic signal • Water management system • Refining dan chemical plants • Pharmaceutical manufacturing Arsitektur memerlukan solusi yang luas melibatkan baik koneksi langsung dengan peralatan (aktuator) seperti saklar, pompa, valve atau koneksi via sistem sekunder seperti sistem SCADA. Sebuah DCS tidak memerlukan campur tangan operator untuk operasionalnya, tetapi dengan digabungnya SCADA dan DCS memungkinkan untuk interaksi dengan operator melalui sistem SCADA. DCS adalah sistem yang terintegrasi ditujukan untuk mengontrol proses manufakturing yang kontinyu atau batch- oriented, seperti oil refining, petrochemical, central station dan pembuatan kertas. DCS dihubungkan
-
Upload
edwin-saputra-embarcadero -
Category
Documents
-
view
160 -
download
12
description
Digital Control System
Transcript of DCS Applications
Distributed Control System (DCS) 1. Pengertian DCS
Distributed Control System merupakan suatu sistem yang mendistribusikan berbagai fungsi yang
digunakan untuk mengendalikan berbagai variabel proses dan unit operasi proses menjadi suatu
pengendalian yang terpusat pada suatu control room dengan berbagai fungsi pengendalian, monitoring
dan optimasi[1]. Distributed control system (DCS) adalah sebuah system kontrol yang biasanya
digunakan pada sistem manufacturing atau proses, dimana elemen controller tidak berada pada sentral
sistem (sebagai pusat) tetapi tersebar di sistem dengan komponen subsistem di bawah kendali satu atau
lebih controller. Keseluruhan sistem dapat menjadi sebuah jaringan untuk komunikasi dan monitoring.
Distributed control system (DCS) digunakan dalam industri untuk memonitor dan mengontrol
peralatan yang tersebar dengan atau tanpa campur tangan manusia. Sebuah DCS biasanya
menggunakan komputer sebagai controller dan menggunakan propietary interconections dan protokol
untuk komunikasi. Modul input dan output membentuk part komponen untuk DCS, Prosesor menerima
informasi dari modul input dan mengirim informasi ke modul output. Modul input menerima informasi dari
instrumentasi input dalam sistem dan modul output mengirim ke instrumen output pada sistem. Bus
komputer atau bus elektrikal menghubungkan prosessor dengan modul melalui multiplexer atau
demultiplexer. Mereka juga menghubungkan kontroller yang tersebar dengan sentral kontroller dan
akhirnya terhubung ke Human machine Interface (HMI) atau panel kontrol.
DCS adalah sebuah istilah yang sangat luas yang menggambarkan sebuah solusi untuk industri
yang sangat variatif, termasuk di dalamnya adalah :
• Electrical power grids dan electrical generation plants
• Environmental control systems
• Traffic signal
• Water management system
• Refining dan chemical plants
• Pharmaceutical manufacturing
Arsitektur memerlukan solusi yang luas melibatkan baik koneksi langsung dengan peralatan
(aktuator) seperti saklar, pompa, valve atau koneksi via sistem sekunder seperti sistem SCADA. Sebuah
DCS tidak memerlukan campur tangan operator untuk operasionalnya, tetapi dengan digabungnya
SCADA dan DCS memungkinkan untuk interaksi dengan operator melalui sistem SCADA. DCS adalah
sistem yang terintegrasi ditujukan untuk mengontrol proses manufakturing yang kontinyu atau batch-
oriented, seperti oil refining, petrochemical, central station dan pembuatan kertas. DCS dihubungkan

dengan sensor dan aktuator dan mengunakan set poin kontrol untuk mengatur aliran material ke pabrik.
Contoh yang paling umum adalah set point control loop yang terdiri dari sensor tekanan, kontroler,
dan control valve. Pengukuran tekanan atau aliran cairan ditransmisikan kepada kontroler, biasanya
melalui bantuan sebuah alat sinyal kondisi Input/Output (I/O). saat variabel yang diukur mencapai titik
tertentu, kontroler akan memerintahkan valve atau aktuator untuk membuka atau menutup sampai proses
aliaran cairan mencapai titik yang ditentukan. Pengolahan minyak yang besar menggunakan ribuan I/O
dan memberlakukan DCS yang sangat besar. Proses tidak dibatasi untuk mengatur aliran cairan melalui
pipa saja tetapi juga termasuk mesin kertas, kontrol variasi kecepatan motor, mesin semen, operasi
penambangan dan hal-hal lainnya.
2. Komponen DCS
Secara umum komponen DCS dapat dibagi menjadi 3 bagian diantaranya:
2.1 Human Interface Station (HIS)
Operator Station digunakan untuk melakukan monitoring terpusat proses dari control room,
menyajikan informasi plant terkini kepada operator melalui graphical user interface(GUI), sehingga
operator dapat melakukan fungsi operasi, maintenance dan troubleshooting, Pengembangan variable
proses, parameter kontrol, alarm, dll.
Gambar 1 Operator Station

2.2 Field control station (FCS)
Station ini Digunakan sebagai control unit untuk mengendalikan variabel – variabel yang
dikendalikan pada proses. Control station dikenal pula dengan istilah Field Control Station (FCS).
Berikut adalah komponen dari FCS:
• Central Processor Unit (CPU)
• Catu daya (Power Supply Unit,PSU)
• VL net coupler
• Modul masukan/keluaran (I/O modules,IOM)
FCS adalah otak dari DCS yang mengeksekusi kontrol dan mengkoputasi kontrol di lapangan.
Gambar 2 Bentuk fisik FCS
Kelebihan FCS
FCS terhubung langsung dalam memproses,sehingga hal tersebut membutuhkan terutama
kehandalan yang tinggi dan akurat serta dibutuhkan kehandalan untuk menjadi aman. Kelebihan
daripada FCS untuk FIO dan FCS untuk RIO. Pada FCS untuk FIO dan FCS untuk RIO, model dari dual
redundant telah digunakan. Pada dual redundant FCS, modul prosesor terdapat dua buah yang saling
berkomunikasi (dual redundant) dan Vnet Coupler, Modul power supply, modul bus interface, bus
coupler, dan node bus dalam yang dual redundant. Pada sistem duplex (dual redundant) modul
prosesor (ada yang aktif , ada juga dalam kondisi standby) yang nantinya dapat di alihkan dari aktif ke
standby tanpa banyak interupsi dalam mengontrol ketika modul yang aktif suatu saat drop atau terjadi
gangguan.

Gambar 3 Duplex dual redundant processor card standard FCS
Baterai
Untuk Pensuplai cadangan untuk memori database dalam prosesor selama listrik mati /apabila
terjadi ganguan listrik/mati lampu. Maksimum waktu back-up 72 jam
Gambar 4 Baterai
Tabel 1 Baterai life

3. Sistem Komunikasi
Sarana pertukaran data antara operator station, control station dan proses. Sarana komunikasi
ini juga bisa dapat digunakan untuk menghubungkan DCS dengan sistem lain seperti PLC
(Programmable Logic Control), SCADA system (Supervisory Control and Acquisition Data), Asset
Management.
Engineering PC /Engineering Work Station (EWS).
PC ini digunakan untuk melakukan modifikasi dari sistem yang sudah ada, juga untuk melakukan
kegiatan maintenance dari sistem DCS Centum VP. Bentuk fisiknya sama seperti HIS, yang
membedakan dengan HIS adalah software didalamnya. EWS dilengkapi dengan BUILDER sebagai
window untuk modifikasi.Selama pekerjaan engineering tidak dilakukan, EWS dapat berfungsi sebagai
HIS dan EWS juga dapat melakukan emulasi/ tes fungsi secara virtual.
Gambar 5 Bentuk EWS
Perlengkapan SISTEM KONFIGURASI – BUS
Communication Gateway Unit (CGW)
Alat ini berfungsi untuk menghubungkan Kabel Vnet dengan kabel Ethernet untuk keperluan
supervisory computer ataupun untuk dihubungkan ke jaringan intranet. Dengan CGW, kita juga dapat
menghubungkan dua sistem CENTUM VP yang jaraknya berjauhan dengan menggunakan jaringan
telepon.
V Net
Vnet adalah kabel komunikasi kontrol yang menghubungkan antara FCS, HIS, BCV dan CGW.
Standar dari Vnet adalah dual redundant. Vnet/IP sebuah kabel berbasis IP yang real-timeuntuk proses
otomasi dan sudah menggunakan sistem komunikasi 1-Gbps.
Ethernet
Vnet/IP sama seperti fungsi komunikasi Ethernet dan digunakan sebagai landasan kabel
komunikasi di masa mendatang yang fungsinya sama seperti teknologi Vnet.
Fieldbus
Foundation fieldbus adalah sebuah komunikasi berbasis digital yang diterapkan pada field
instruments dan nantinya field bus akan menggantikan sistem konvensional antarmuka analog 4-20 mA.
Engginering PC (ENG USER)
Fungsi engginering PC adalah untuk manajemen dan pemeliharaan sistem.
Operator PC (OFF USER)
Fungsi operator PC adalah sebagai pencatat data variable pada saat real time ataupun data
sebelumnya dan juga sebagai fungsi operasional harian sekaligus kontrol seperti: process alarm
,indikator level, dll[1]
2.3 Tipe Arsitektur DCS
DCS memiliki arsitektur yang lengkap dan dibuat untuk sesuai dengan field dan kebutuhan yang
dikontrol. Sistem utama DCS meliputi:
1. Controller
2. I/O
3. Terminal Unit
4. HMI / Supervisory Station
5. Engineering Station
6. Historian
7. Sistem aset management & sistem report

Gambar 6 Arsitektur Umum DCS
Sistem utama tersebut dirangkai dalam suatu topografi yang bersusun membentuk sistem
pengontrolan, menghasilkan report, dan penyimpanan data. Berikut ini topografi sistem DCS
Gambar 7 Topografi Sistem DCS
Dari gambar topografi tersebut, sampai saat ini DCS adalah sistem kontrol yang memiliki fungsi
terlengkap dan cocok untuk aplikasi yang mengedepankan sistem integrasi. Adapun di bawah ini terdapat
gambar arsitektur dari beberapa tipe DCS.

Foxboro I/A Series
Gambar 8 Arsitektur DCS Foxboro I/A Series
Siemens PCS7
Gambar 9 Arsitektur DCS PCS 7
Honeywell Experion PKS
Gambar 10 Arsitektur Honeywell Experion PKS

Honeywell TDC3000
Gambar 11 Arsitektur Honeywell TDC3000
Honeywell Total Plant Solutions (TPS)
Gambar 12 Arsitektur Honeywell Total Plant Solutions (TPS)
Yokogawa Centum CS3000
Gambar 13 Arsitektur Yokogawa Centum CS3000

4 Sistem Pengendalian Menggunakan DCS Centum CS 3000
Teknologi DCS menggunakan beberapa kontroler yang terpisah. Masing-masing kontroler
bekerja untuk menangani beberapa loop pengendalian. Sistem ini dinamakan Distributed control system
(DCS), karena mekanisme pengendalian dilakukan beberapa kontroler (distributed). Gambar 13
menunjukkan sistem pengendalian DCS.
Gambar 14 Sistem pengendalian DCS
Dari gambar tersebut, Field instrument akan mengirimkan sinyal ke unit kontroler. Kontroler
selanjutnya mengolah sinyal tersebut sesuai setting yang ada. Output sinyal dikirim ke field instrumentt
di plant. Selama proses kalkulasi dan pengendalian, kontroler yang ada akan selalu mengirim sinyal ke
sistem komputer pada kontrol room. Dengan demikian proses pengendalian dapat diawasi secara terus
menerus.
Perancangan Sistem Kontrol Proses
Perancangan sistem kontrol proses yaitu kontroler pada DCS Centum CS 3000 mengirimkan
sinyal kontrol menuju plant dan umpan balik dari keluaran plant akan dikirimkan kembali ke DCS
Centum CS 3000. Pada proses pengiriman sinyal kontrol, Kontroler terhubung ke plant melalui melalui
jaringan. DCS Centum CS 3000 digunakan sebagai kontroler dan pusat dari perhitungan untuk
mengirimkan sinyal kontrol, sehingga mempertahankan keluaran plant sesuai dengan set point. Sinyal
kontrol dari kontroler akan dikirimkan melalui sistem tambahan
(Embeded system), yaitu penggunaan Labview sebagai pertukaran data. Hal ini disebabkan, tidak
tersedianya modul komunikais modbus ethernet pada DCS Centum CS 3000. Gambar 15 menunjukkan
diagram blok sistem kontrol proses ini.
Gambar 15 Diagram blok sistem kontrol proses
5. Tipe Kontroller pada DCS Yokogawa CS3000
Pada DCS yokogawa CS3000 ini pemrograman algoritma kontrol menggunakan function blok,
dimana setiap blok memiliki fungsinya masing-masing, seperti :
1 Link blok PIO, digunakan sebagai masukan dan keluaran module dari centum CS3000
2 PID, digunakan sebagai blok untuk algoritma kontrol PID
3 ST16, digunakan untuk pemrograman sekuensial
4 CALCU dan CALCU-L
5 LC64, digunakan untuk pemrograman logika
Dan masih banyak lagi yang function blok-blok lain yang terdapat dalam program centum 3000
yang digunakan untuk membuat algoritma kontrol serta monitoring suatu plant. Pada DCS yokogawa
memiliki beberapa algoritma pengendalian PID, yaitu :
1 Tipe kontrol dasar PID (PID)
Melakukan aksi kontrol proporsional, integral dan derivatif mengikuti perubahan nilai set point.
Bertujuan untuk menghasilkan respon yang cepat terhadap perubahan nilai set point.
2 Tipe kontrol PID proporsional PV dan derivativ (I-PD)
Hanya melakukan aksi integral saat nilai set point berubah. Menjamin kestabilan sistem meskipun
nilai set point berubah secara mendadak.
3 Tipe kontrol PID derivativ PV (PI-D)
Hanya melakukan aksi proporsional dan integral saat nilai set point berubah. Digunakan jika
memerlukan respon yang lebih baik terhadap perubahan nilai, seperti blok kontrol hilir (downstream)
pada loop kontrol cascade.
4 Tipe penentuan otomatis
Pada mode cascade atau remote cascade, menggunakan tipe kontrol PID derivatif PV (PI-D) agar
dapat lebih baik dalam mengikuti perubahan nilai set point. Pada mode automatis, menggunakan tipe
kontrol PID proporsional PV dan derivatif (I-PD) untuk menjaga kestabilan sistem.
5 Tipe penentuan otomatis 2
Pada mode cascade menggunakan tipe kontrol PID derivatif PV (PI-D). Pada mode automatis atau
remote cascade menggunakan tipe kontrol PID proporsional PV dan derivatif (I-PD) untuk menjaga
kestabilan sistem.
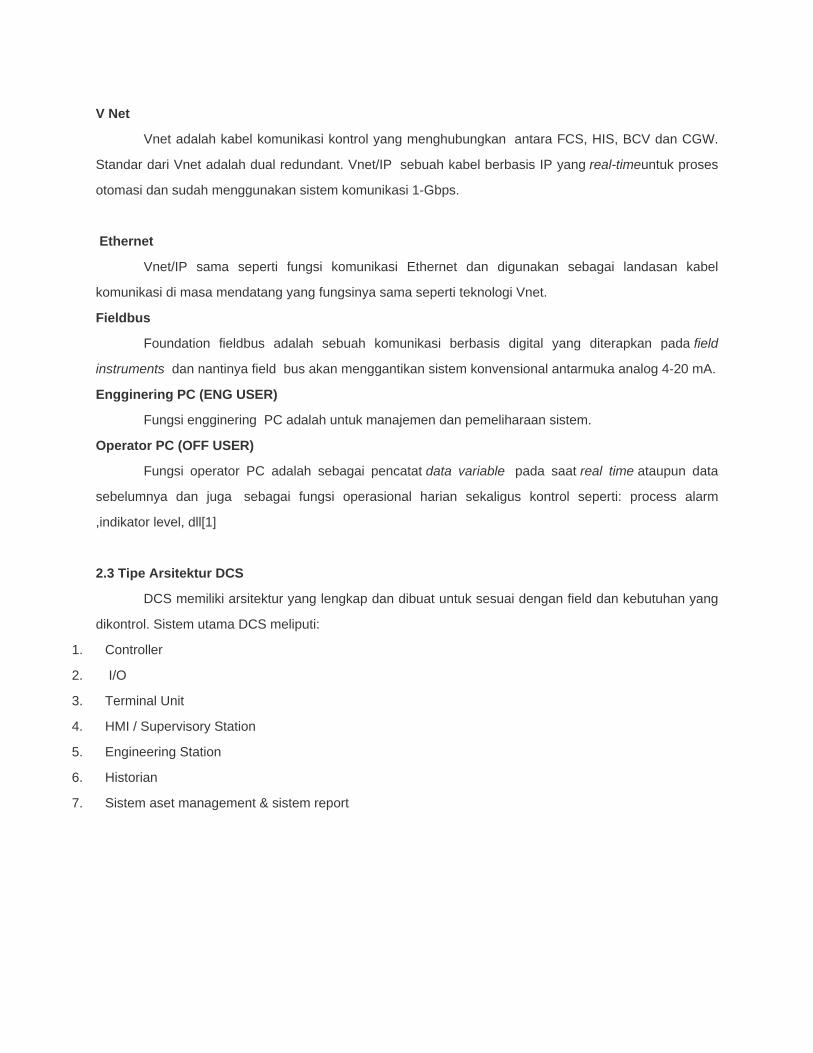
Masalah Pembahasan
1. Pengolahan kimia
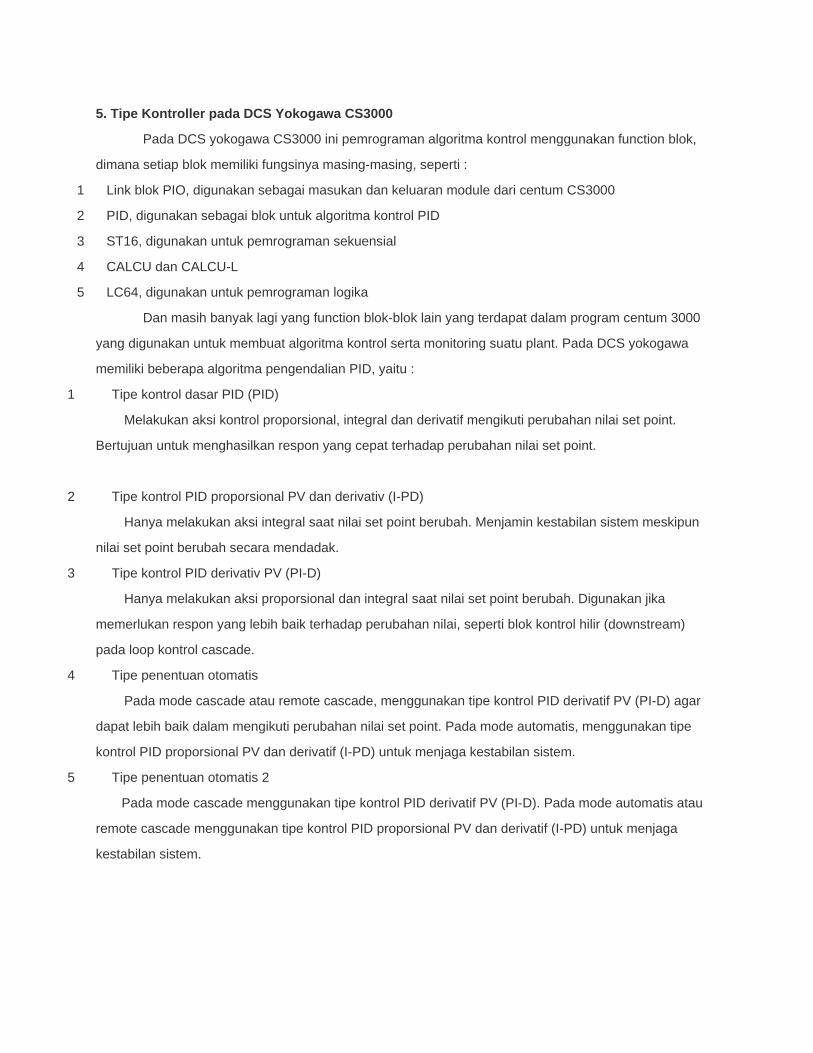
2. Perakitan Sistem

3 .Pengolahan minuman
Tugas:
1. Dibagi 3 kelompok masing-masing judul,
2. Realisasikan sistem ini dengan DCS ,








![DCS - server.3rd-wing.netserver.3rd-wing.net/public/Manuels DCS/DCS World Su-25T Flight... · [SU-25T FROGFOOT] DCS Eagle Dynamics i DCS World Su-25T Manuel de Vol](https://static.fdocument.pub/doc/165x107/5b9a637e09d3f22d2a8b4a1e/dcs-server3rd-wingnetserver3rd-wingnetpublicmanuels-dcsdcs-world-su-25t.jpg)








