Controladores Robustos D polos Otimizados via LMI ... · de 42 54V a 400` V. O conversor boost...
122
Universidade Federal do Cear´ a Centro de Tecnologia Programa de P´ osGradua¸c˜ ao em Engenharia El´ etrica Controladores Robustos D -LQI e D -Aloca¸ c˜ ao de polos Otimizados via LMI Aplicados a um Conversor Boost Alto Ganho com C´ elula de Comuta¸c˜ ao Trˆ es Estados Marcus Vinicius Silv´ erio Costa Fortaleza Agosto 2012
Transcript of Controladores Robustos D polos Otimizados via LMI ... · de 42 54V a 400` V. O conversor boost...

Universidade Federal do Ceara
Centro de Tecnologia
Programa de Pos Graduacao em Engenharia Eletrica
Controladores Robustos D-LQI e D-Alocacao depolos Otimizados via LMI Aplicados a um
Conversor Boost Alto Ganho com Celula deComutacao Tres Estados
Marcus Vinicius Silverio Costa
Fortaleza
Agosto 2012

i
Marcus Vinicius Silverio Costa
Controladores Robustos D-LQI e D-Alocacao de
polos Otimizados via LMI Aplicados a um
Conversor Boost Alto Ganho com Celula de
Comutacao Tres Estados
Dissertacao submetida a Universidade Fede-ral do Ceara como parte dos requisitos paraa obtencao do grau de mestre em EngenhariaEletrica.
Orientador:Prof. Jose Carlos Teles Campos, Dr
Fortaleza
Agosto 2012

Dados Internacionais de Catalogação na Publicação
Universidade Federal do Ceará
Biblioteca de Ciências e Tecnologia
VM315c Costa, Marcus Vinicius Silvério.
Controladores robustos D-LQI e D-Alocação de polos otimizados via LMI aplicados a um
conversor boost alto ganho com célula de comutação três estados / Marcus Vinicius Silvério Costa –
2012. 120 f. : il., color., enc. ; 30 cm.
Dissertação (mestrado) – Universidade Federal do Ceará, Centro de Tecnologia, Departamento de
Engenharia Elétrica, Programa de Pós-Graduação em Engenharia Elétrica, Fortaleza, 2012.
Área de Concentração: Engenharia Elétrica (Engenharias IV).
Orientação: Prof. Dr. José Carlos Teles Campos.
1.Controle robusto. 2. Realimentação de estados. I. Título.
CDD 621.3


iv
Dedicatoria
Este trabalho e dedicado a Deus, ao meu
pai (in memorian) e a minha mae.

v
Agradecimentos
Primeiramente a Deus, que me deu forcas para conclusao deste trabalho.
Ao meu pai Emilson Santos Costa (in memorian) que se sacrificou, acreditando na minha
capacidade em superar desafios, a minha mae Maria Joita Silverio Costa, que testemunhou
minhas longas horas para conclusao desta obra.
Ao orientador professor Dr. Jose Carlos Teles Campos , que me orientou e acompanhou na
conclusao deste trabalho.
Ao Francisco Everton Uchoa Reis, que contribuiu significativamente pelo desenvolvimento
desta obra.
Ao meu colega de pesquisa, Vandilberto Pereira Pinto, pelo suporte na pesquisa e na teoria
sobre controle. Agradeco tambem ao Kelson Leite pelas ajudas nas referencias bibliograficas
sobre LMIs.
Aos meus colegas de laboratorio J. Gleidson e J. Oliveira pela ajuda e suporte.
Ao CNPQ pelo suporte financeiro por meio da bolsa de estudo e ao PPGEE pelo suporte
academico.
Aos meus Pastores que me apoiaram, durante o perıodo de mestrado, para buscar a Paz de
Espırito em Deus.
A todas as pessoas que por motivo de esquecimento nao foram citadas anteriormente, vou
deixando neste espaco minhas sinceras desculpas.

vi
“Bem-aventurado o homem que acha sabedoria, e o homem que adquire conhecimento; porque
e melhor a sua mercadoria do que artigos de prata, e maior o seu lucro que o ouro mais fino.
Mais preciosa e do que os rubis, e tudo o que mais possas desejar nao se pode comparar a ela. ”
Proverbios 3:13-15

vii
Resumo
Este trabalho visa a aplicacao dos controles robustos D-LQI e D-Alocacao de polos oti-mizados via LMIs em um conversor boost de alto ganho de tensao com celula de comutacaode tres estados. Este conversor consiste numa topologia moderna derivada do conversor boostclassico. O boost e considerado um elevador de tensao, o qual converte uma entrada na faixade 42−54V a 400V . O conversor boost proposto e reduzido ao modelo de um conversor equi-valente e e modelado no espaco de estados medio, em que e observado que a matriz D 6= 0,sendo entao uma modelagem que apresenta uma peculiaridade de acordo com a literatura, poisa solucao de controle e mais complexa. As estrategias de controle aplicadas usam de procedi-mentos matematicos denominados de Desigualdades Matriciais Lineares (LMIs-Linear MatrixInequalities), que podem ser resolvidos por otimizacao convexa ou programacao semidefinidapositiva (SDP procedures). As ferramentas matematicas utilizadas para resolucao das LMIsneste trabalho sao o Yalmip e SeDuMi , que sao inseridas no MATLAB . Alem disso sao anali-sadas as incertezas presentes no processo, bem como a robustez do modelo em malha fechada.Sao obtidos os resultados de simulacao via MATLAB -PSIM e sao feitas as analises referentesa estes resultados, alem da analise dos resultados experimentais e a conclusao do estudo, alemdas propostas de trabalhos futuros. O Apendice mostra os procedimentos de instalacao dosresolvedores alem do uso correto com base nas equacoes descritas na teoria sobre LMIs.
Numero de paginas:120
Palavras-chave:D-LQI, D-Alocacao de polos, Controle Robusto, Conversor boost de AltoGanho.

viii
Abstract
This work involves the application of robust controls D-LQI and D-pole placement viaLMIs in a high-gain boost with three states switching cell. This converter consists of a moderntopology derived the classic boost converter . This boost converter is considered a step-upconverter, which a range of 42−54V voltage input to 400V voltage output. The proposed boostconverter is reduced to equivalent model and is modeled at space state avarage, in which isobserved that the matrix D 6= 0, being then a modeling that presents a peculiarity accordingto literature, thus the control solution is more complex. The control strategies applied usemathematical procedures called Linear Matrix Inequalities (LMIs), which can be solved byconvex optimization or positive semidefinite procedures (SDP). The mathematical tools used tosolve the LMIs this work are Yalmip and SeDuMi , which are inserted in MATLAB . Furtheranalyzes the uncertainties present in the process, as well as the robustness of closed loop model.The simulation results are obtained via MATLAB and PSIM and analyzes made regarding theseresults, besides the analysis of experimental results and conclusion of study, in addition toproposals for future work. The Appendix shows the installation procedures and use correctsolvers based on the equations described in LMI theory.
Number of pages:120
Keywords:D-LQI, D-Pole Placement, Robust Control, High-Gain Boost Converter .

ix
Sumario
Lista de Figuras xii
Lista de Tabelas xvi
Lista de Sımbolos xvii
Lista de Acronimos e Abreviaturas xxi
1 Introducao 1
1.1 Estado da arte sobre os temas . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Estado da arte sobre o conversor boost . . . . . . . . . . . . . . . . . . 1
1.1.2 Estado da arte sobre as Desigualdades Matriciais Lineares e a teoria do
controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Revisao bibliografica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Objetivos e contribuicoes deste trabalho . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Objetivos deste trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.2 Contribuicoes deste trabalho . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.3 Publicacoes em congressos . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Resumo dos capıtulos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Teoria das Desigualdades Matriciais Lineares no Controle por Alocacao de Polos
e LQR 9
2.1 Introducao as desigualdades matriciais lineares - LMIs . . . . . . . . . . . . . 9
2.2 Conceitos basicos de LMIs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Estabilidade de Lyapunov via LMIs . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Politopos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 Complemento de Schur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Estabilizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.7 Controle LQR via otimizacao LMI . . . . . . . . . . . . . . . . . . . . . . . . 17
2.8 Restricao LMI por D-estabilidade . . . . . . . . . . . . . . . . . . . . . . . . 19
2.9 Estabilizacao via D-estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . 22

Sumario x
2.9.1 Controle LQR com restricao LMI via D-estabilidade - D-LQR . . . . 22
2.10 Analise das incertezas politopicas . . . . . . . . . . . . . . . . . . . . . . . . 23
2.11 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3 Teoria e Modelagem do Conversor boost 28
3.1 Topologia classica dos conversores CC-CC . . . . . . . . . . . . . . . . . . . 28
3.2 Conceito do conversor original . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2.1 Reducao do Conversor boost original ao modelo equivalente . . . . . . 33
3.3 Modelagem equivalente do conversor boost no espaco de estados . . . . . . . . 34
3.3.1 Modelo linearizado de conversores CC no espaco de estados . . . . . . 34
3.3.2 Modelo no espaco de estados do boost equivalente . . . . . . . . . . . 36
3.4 Analise das incertezas no conversor . . . . . . . . . . . . . . . . . . . . . . . 39
3.5 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4 Estrategias de Controle Aplicado ao Conversor Boost 42
4.1 Servomecanismo com acao integral . . . . . . . . . . . . . . . . . . . . . . . 42
4.2 Projeto do controlador robusto otimizado por LMI via alocacao de polos - D-
Alocacao de polos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.3 Projeto do controlador robusto otimizado via LQI com D-estabilidade - D-LQI 46
4.4 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5 Analise e Resultados de Simulacao do Conversor 48
5.1 Modelo numerico em malha aberta do conversor boost equivalente . . . . . . . 48
5.2 Simulacao no PSIM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.3 Resposta do sistema em malha fechada do controle robusto . . . . . . . . . . . 52
5.3.1 Resultados numericos em malha fechada do controle por D-Alocacao
de polos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.3.2 Resultados numericos em malha fechada do controle por D-LQI . . . . 52
5.3.3 Analise das curvas no regime transitorio e permanente . . . . . . . . . 53
5.3.4 Analise das curvas em regime permanente . . . . . . . . . . . . . . . . 55
5.3.5 Analise de robustez das curvas na frequencia . . . . . . . . . . . . . . 60
5.4 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
6 Analise e Resultados Experimentais do Conversor 65
6.1 Ambiente real de implementacao . . . . . . . . . . . . . . . . . . . . . . . . . 65
6.2 Resultados experimentais do controle D-Alocacao de polos robusto . . . . . . 67
6.2.1 Resultados experimentais para Vg = 42V . . . . . . . . . . . . . . . . 67

Sumario xi
6.2.2 Resultados experimentais para Vg = 54V . . . . . . . . . . . . . . . . 70
6.3 Resultados experimentais do controle D-LQI robusto . . . . . . . . . . . . . . 70
6.3.1 Resultados experimentais para Vg = 42V . . . . . . . . . . . . . . . . 70
6.3.2 Resultados experimentais para Vg = 54V . . . . . . . . . . . . . . . . 76
6.4 Complicacoes durante o experimento . . . . . . . . . . . . . . . . . . . . . . . 84
6.5 Consideracoes finais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
7 Conclusoes Finais e Propostas de Trabalhos Futuros 85
7.1 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
7.2 Propostas de trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Referencias Bibliograficas 87
Apendice A -- Introducao aos pacotes computacionais SeDuMi e Yalmip no MA-
TLAB 92
A.1 Procedimento de Instalacao dos Pacotes SeDuMi e Yalmip . . . . . . . . . . . 92
A.2 Testando no MATLAB a estabilidade de Lyapunov via LMI . . . . . . . . . . 95

xii
Lista de Figuras
2.1 Solucao de politopos via LMIs. . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Exemplo de um politopo de 5 vertices (PALHARES; GONCALVES, 2008). . . 15
2.3 Restricoes LMI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.4 Representacao em diagramas de blocos dos tipos de incertezas aplicado na
planta (SHAHIAN; HASSUL, 1993). . . . . . . . . . . . . . . . . . . . . . . 24
2.5 (a) Funcao sensibilidade S(s).(b) Sensibilidade complementar T (s). . . . . . . 25
2.6 Curva desejavel da funcao de transferencia de malha aberta do de um sistema
de realimentacao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 Topologias classicas de conversores CC-CC. . . . . . . . . . . . . . . . . . . 29
3.2 Conversor boost proposto por Bascope e Barbi (2000). . . . . . . . . . . . . . 30
3.3 Princıpio de chaveamento da celula de comutacao em 3 estados proposto por
Bascope e Barbi (2000) e aplicado por Santero (2006) . . . . . . . . . . . . . . 31
3.4 Conversor proposto por Torrico-Bascope et al. (2006b, 2006c), Bascope e Barbi
(2000) do boost alto ganho . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.5 Topologia do conversor boost de alto ganho de tensao com celula de comutacao
de tres estados conforme Orellana-Lafuente et al. (2010), Reis et al. (2011). . . 32
3.6 Circuito do conversor boost classico equivalente. . . . . . . . . . . . . . . . . 34
3.7 Definicao dos intervalos de chaveamento do conversor (MIDDLEBROOK; CUK,
1976) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.8 Conversor boost nos estagios de chaveamento. . . . . . . . . . . . . . . . . . . 37
3.9 Regiao de incertezas politopicas Pot × Vg. . . . . . . . . . . . . . . . . . . . . 41
4.1 Servomecanismo de acao integral. . . . . . . . . . . . . . . . . . . . . . . . . 42
4.2 Regiao desejavel para o projeto de controle. . . . . . . . . . . . . . . . . . . . 45
4.3 Regiao desejada aplicada ao LQR com D-estabilidade. . . . . . . . . . . . . . 47
5.1 Variacao da carga e da tensao de entrada no conversor. . . . . . . . . . . . . . 50
5.2 Modelo do conversor original em malha fechada no PSIM. . . . . . . . . . . . 51
5.3 Tensao Vo dos controles D-alocacao de polos e D-LQI para o conversor boost
original. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
5.4 Corrente no indutor tanto pelo controle por D-alocacao de polos como D-LQI
para o conversor boost original. . . . . . . . . . . . . . . . . . . . . . . . . . 54

Lista de Figuras xiii
5.5 Tensao de referencia PWM tanto pelo controle por D-alocacao de polos como
D-LQI para o conversor boost original. . . . . . . . . . . . . . . . . . . . . . 54
5.6 Tensao e corrente de saıda para o controlador robusto D-Alocacao de polos para
Vg = 42V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.7 Tensao de saıda e corrente no indutor para o controlador robusto D-Alocacao
de polos para Vg = 42V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.8 Tensao de saıda e corrente de saıda no conversor para o controlador robusto
D-Alocacao de polos Vg = 54V . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.9 Tensao de saıda e corrente no indutor no conversor para o controlador robusto
D-Alocacao de polos Vg = 54V . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.10 Tensao de saıda e corrente de saıda no conversor para o controlador robusto via
D-LQI Vg = 42V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.11 Tensao de saıda e corrente no indutor no conversor para o controlador robusto
via D-LQI Vg = 42V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.12 Tensao de saıda e corrente de saıda no conversor para o controlador robusto via
D-LQI Vg = 54V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.13 Tensao de saıda e corrente no indutor no conversor para o controlador robusto
via D-LQI Vg = 54V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.14 Comparacao de incertezas na escolha da mais representativa. . . . . . . . . . . 62
5.15 Analise da curva G( jω)K( jω). . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.16 Curvas de S( jω) e T ( jω) do modelo compensado por D-Alocacao de polos e
D-LQI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.17 Analise de estabilidade robusta dos controladores D-Alocacao de polos e D-
LQI em relacao a incerteza ∆m3. . . . . . . . . . . . . . . . . . . . . . . . . . 64
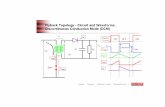
6.1 Diagrama geral do circuito com a configuracao de controle. . . . . . . . . . . 66
6.2 Conversor boost original. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.3 Tensao e corrente de saıda, sinal de controle aplicada ao conversor em regime
permanente. Canal Vo 100V/div, canal Io 200mA/div e canal VPWM 20V/div.
Eixo do tempo (horizontal) 10µs/div. . . . . . . . . . . . . . . . . . . . . . . 68
6.4 Tensao e corrente de saıda durante a mudanca do degrau de carga. Canal Vo
100V/div, canal Io 200mA/div. Eixo do tempo (horizontal) 1ms/div para Fi-
gura 6.4(a) e 20ms/div para Figura 6.4(b). . . . . . . . . . . . . . . . . . . . 69
6.5 Tensao e corrente de saıda no momento do degrau de carga . Canal Vo 2V/div,
canal Io 200mA/div. Eixo do tempo (horizontal) 20ms/div. . . . . . . . . . . . 71

Lista de Figuras xiv
6.6 Tensao e corrente de saıda e sinal de PWM aplicado ao conversor para Vg = 54V
em regime permanente. Canal Vo 100V/div, canal Io 200mA/div. Eixo do
tempo (horizontal) 10µs/div. . . . . . . . . . . . . . . . . . . . . . . . . . . 72
6.7 Tensao e corrente de saıda durante a mudanca do degrau de carga para Vg = 54V .
Canal Vo 100V/div, canal Io 200mA/div. Eixo do tempo (horizontal) 20ms/div. 73
6.8 Tensao e corrente de saıda no momento do degrau de carga. Canal Vo 2V/div,
canal Io 200mA/div. Eixo do tempo (horizontal) 20ms/div. . . . . . . . . . . . 74
6.9 Tensao de saıda, tensao de entrada e corrente no indutor no momento do degrau
de carga. Canal Vo 100V/div, canal Vg 20V/div e o canal IL 5A/div. Eixo do
tempo (horizontal) 20ms/div. . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
6.10 Tensao e corrente de saıda e sinal de PWM para o controle D-LQI, sendo
Vg = 42V .Canal Vo 100V/div, canal Io 200mA/div. Eixo do tempo (horizontal)
10µs/div. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6.11 Tensao e corrente de saıda para o controle D-LQI com variacao de carga, sendo
Vg = 42V . Canal Vo 100V/div, Io 200mA/div. Eixo do tempo (horizontal)
5ms/div para Figura 6.11(a) e 20ms/div para Figura 6.11(b). . . . . . . . . . . 78
6.12 Tensao e corrente de saıda, sendo Vg = 42V . Canal Vo 2V/div, Io 200mA/div.
Eixo do tempo (horizontal) 20ms/div. . . . . . . . . . . . . . . . . . . . . . . 79
6.13 Tensao de saıda, tensao de entrada e corrente no indutor, sendo Vg = 42V . Canal
Vo 100V/div, canal Vg 20V/div e canal IL 5A/div. Eixo do tempo (horizontal)
20ms/div. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
6.14 Tensao de saıda, corrente no indutor para o controle D-LQI, sendo Vg = 54V .
Canal Vo 100V/div, canal IL 5A/div. Eixo do tempo (horizontal) 200ms/div
para Figura 6.14(a) e 50ms/div para Figura 6.14(b) . . . . . . . . . . . . . . . 81
6.15 Tensao de saıda, corrente no indutor com variacao de carga, sendo Vg = 54V .
Canal Vo 2V/div, canal IL 5A/div. Eixo do tempo (horizontal) 20ms/div. . . . 82
6.16 Tensao de saıda, corrente no indutor, sendo Vg = 54V .Canal Vo 100V/div, canal
Vg 20V/div e canal IL 5A/div. Eixo do tempo (horizontal) 20ms/div. . . . . . . 83
6.17 Tensao de saıda, corrente no indutor para o controle D-LQI em regime perma-
nente, sendo Vg = 54V .Canal Vo 100V/div, canal IL 5A/div. Eixo do tempo
(horizontal) 20µs/div. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
A.1 Descompactando pastas SeDuMi e Yalmip . . . . . . . . . . . . . . . . . . . . 92
A.2 Pasta do toolbox do MATLAB . . . . . . . . . . . . . . . . . . . . . . . . . . 93
A.3 Instalacao dos pacotes SeDuMi e Yalmip no MATLAB . . . . . . . . . . . . . 93
A.4 Configurando os pacotes SeDuMi e Yalmip no MATLAB . . . . . . . . . . . . 94

Lista de Figuras xv
A.5 Instalando o pacote Yalmip no MATLAB . . . . . . . . . . . . . . . . . . . . 94
A.6 Confirmando os pacotes SeDuMi e Yalmip no MATLAB . . . . . . . . . . . . 95
A.7 Testando o pacote Yalmip no prompt do MATLAB . . . . . . . . . . . . . . . 95
A.8 Confirmacao do pacote Yalmip no prompt do MATLAB . . . . . . . . . . . . . 96

xvi
Lista de Tabelas
3.1 Parametros do conversor original adaptado de Orellana-Lafuente et al. (2010),
Reis et al. (2011). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Parametros do conversor equivalente (ORELLANA-LAFUENTE et al., 2010;
REIS et al., 2011). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3 Incertezas de Projeto do conversor conforme e Tabela 3.1 condicoes fısicas de
aplicacao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.1 Frequencias de canto resultantes de cada controle. . . . . . . . . . . . . . . . . 60
5.2 Autovalores do modelo de malha aberta e fechada do conversor boost equivalente. 61
6.1 Valores utilizados para implementacao pratica. . . . . . . . . . . . . . . . . . . 65

xvii
Lista de Sımbolos
Vo - Tensao de saıda do conversor em funcao do tempo, Vo =Vo(t);
Vg - Tensao de entrada do conversor em funcao do tempo, Vg =Vg(t)
Dd - Ciclo de trabalho do conversor;
Voeq - Tensao de saıda equivalente do conversor em funcao do tempo, Voeq =Voeq(t);
Vgeq - Tensao de entrada equivalente do conversor em funcao do tempo, Vgeq =Vgeq(t);
Ddeq - Ciclo de trabalho do conversor equivalente;
rv - Relacao de tensao entre conversor original e o conversor equivalente;
x - Vetor de estados do sistema no espaco de estados dimensao xm×1(t) ou dimensao
compatıvel, x = x(t);
u - Vetor de controle do sistema no espaco de estados dimensao u1×1(t), u = u(t) ;
A - Matriz de estado de dimensao Am×m ou dimensao compatıvel;
B - Matriz de controle de dimensao Bm×1 ou dimensao compatıvel;
C - Matriz de estado de saıda de dimensao C1×m ou dimensao compatıvel;
D - Matriz de controle de saıda de dimensao D1×1;
∆A - Matriz de estado de incertezas de dimensao Ap×p ou dimensao compatıvel;
∆B - Matriz de controle de incertezas de dimensao Bp×1 ou dimensao compatıvel;
∆C - Matriz de estado de incertezas de saıda de dimensao C1×p ou dimensao compatıvel;
∆D - Matriz de controle de saıda de incertezas de dimensao; D1×1;
V (x) - Funcao de Lyapunov;
J - Funcao custo ou ındice de desempenho quadratico em funcao do tempo, J = J(t);
P - Variavel semi definida positiva de dimensao de ordem m ou compatıvel com a matriz
A;

Lista de Sımbolos xviii
Y - Variavel auxiliar de dimensao compatıvel com a transposta de B, dim(Y ) = dim(B′);
Q - Matriz de ponderacao arbitraria compatıvel com a dimensao de A;
R - Matriz de ponderacao arbitraria de ordem compatıvel ao numero de entradas de con-
trole u;
K - Ganho de realimentacao de estados compatıvel com a transposta de B, dim(K) =
dim(B′);
Z - Matriz auxiliar de minimizacao compatıvel de ordem compatıvel ao numero de entra-
das de controle u;
z - Variavel complexa no plano da transformada de Laplace;
h1 - Limite mınimo de restricao;
h2 - Limite maximo de restricao;
rr - Raio do disco centrado em (−q,0);
θ - Angulo de restricao do setor conico da origem;
D - Sımbolo de regioes LMIs;
Co - Capacitor de saıda no lado da carga;
Coeq - Capacitor equivalente de saıda no lado da carga;
Rse - Resistencia intrınseca em serie com o capacitor;
Rseeq - Resistencia equivalente intrınseca em serie com o capacitor equivalente;
L - Indutancia de projeto no conversor original;
Leq - Indutancia equivalente de projeto no conversor equivalente;
Ro - Resistencia de carga do conversor original;
Roeq - Resistencia equivalente de carga do conversor equivalente;
fs - Frequencia de chaveamento do conversor;
fseq - Frequencia de chaveamento equivalente do conversor;
rv - Relacao de transformacao do conversor original para o equivalente;

Lista de Sımbolos xix
Td - Intervalo de chaveamento;
B - Matriz de controle auxiliar de dimensao Bm×1 ou dimensao compatıvel;
D - Matriz de controle de saıda auxiliar de dimensao Dm×1 ou dimensao compatıvel;
X - Variavel de estado em regime permanente;
Vo - Variavel de saıda em regime permanente;
χ - Variavel de estado com pertubacao do ciclo de trabalho;
vo - Variavel de saıda com perturbacao do ciclo de trabalho;
A1,A2 - Matrizes de estado do conversor no intervalo de chaveamento S1 e S2;
B1,B2 - Matrizes de entrada de controle do conversor no intervalo de chaveamento S1 e
S2;
C1,C2 - Matrizes de estado de saıda do conversor no intervalo de chaveamento S1 e S2;
D1,D2 - Matrizes de entrada de controle do conversor no intervalo de chaveamento S1 e
S2;
r(t) - Entrada de referencia;
S(s) - Funcao sensibilidade ou funcao S(s);
T (s) - Funcao co-sensibilidade ou funcao T(s);
ξ - Erro de regime integrado;
A, B,C, D - Matrizes expandidas de dimensoes compatıveis com as matrizes A,B,C,D;
VT - Tensao de 5 volts;
u - entrada de controle no conversor, sendo u = d;
x - variavel de estado, considerando o modelo espaco de estado medio x = χ +X , na
teoria do controle aplicado ao conversor, x = χ;
G(s) - Funcao de transferencia sem incertezas;
G(s) - Funcao de transferencia com incertezas;
m f a - Subındice do modelo espaco de estados medio em malha fechada do controle por
D-Alocacao de polos;

Lista de Sımbolos xx
m f lqi - Subındice do modelo espaco de estados medio em malha fechada do controle por
D-LQI;

xxi
Lista de Acronimos e Abreviaturas
LMI - Linear matrix Inequalities - Desiguladades Matriciais Lineares;
CC - Corrente Contınua;
CA - Corrente Alternada;
LQR - Linear Quadratic Regulator - Regulador Linear Quadratico;
LQI - Linear Quadratic Regulator with Integral Action - Regulador Linear Quadratico
com Acao Integral;
LQG - Linear Quadratic Gaussian - Regulador Linear Quadratico Gaussiano;
PDC - Parallel Distribuition Compesation - Compensacao Paralela Distribuıda;
PWM - Pulse Width Modulation - Modulacao por Largura de Pulso;
SVD - Singular Value Decomposition - Decomposicao de Valores Singulares;
FTMF - Funcao de Transferencia em Malha Fechada;
MCC - Modo de Conducao Contınua;
GPEC - Grupo de Pesquisa em Energia e Controle;
CCTE - Celula de Comutacao em Tres Estados

1
1 Introducao
Este capıtulo aborda sobre o estado da arte dos conversores boost e sobre os trabalhos en-
volvendo LMIs. Alem disso, e feita uma revisao bibliografica sobre os principais trabalhos que
motivaram esta dissertacao. Sao mostrados os objetivos bem como as contribuicoes propostas,
alem do breve resumo dos capıtulos desta dissertacao.
1.1 Estado da arte sobre os temas
1.1.1 Estado da arte sobre o conversor boost
O trabalho de Middlebrook e Cuk (1976), embora nao seja recente, e uma referencia rele-
vante na modelagem de conversores CC-CC, pois aborda alem do modelo linearizado no espaco
de estados aplicado aos conversores buck e boost, apresenta tambem a modelagem no espaco de
estados em pequenos sinais destes conversores. Esse trabalho e base para o modelo no espaco
de estados adotado para o projeto de controle do conversor boost desta dissertacao.
O trabalho de Leung et al. (1991, 1993) elabora o projeto de controle otimo discreto em
conversores CC-CC, levando em consideracao o uso de observadores e analise dos zeros e
polos e analise no domınio da frequencia para o projeto usando o controle LQR.
Mohan (1995) apresenta o nıvel de conteudo semelhante ao apresentado por Erickson
(2001). Contudo, seu livro visa o aspecto computacional e aplicado a modelagem de con-
versores. Alem disso, essa referencia apresenta a teoria aplicada, levando em consideracao os
tipos de modelagens matematicas que podem ser utilizadas nos conversores, entre estas mode-
lagens esta o modo de conducao contınuo. O livro de Mohan (2003) aborda a teoria classica
dos conversores semelhante ao conceito empregado por Erickson (2001).
Gezgin et al. (1997) elaboram uma metodologia sistematica para o projeto de controle otimo
LQR considerando os parametros de projeto variantes e a minimizacao da potencia consumida
pelo conversor. Seu trabalho faz uso de um algoritmo que busca as matrizes de ponderacao Q e
R que satisfaz o ındice de desempenho e as faixas de tolerancias dos parametros do dispositivo.
O estudo sobre o conversor boost faz uso pela literatura classica de Rashid (2001). A
necessidade de conhecimento mais profundo e vista nos livros de Erickson (2001), Mohan

1.1 Estado da arte sobre os temas 2
(1995, 2003), Sira-Ramırez e Silva-Ortigoza (2006).
Erickson (2001) aborda os fundamentos sobre conversores de potencia. Seu livro abrange
os principais tipos de conversores tanto CC-CC como CC-CA ou CA-CC estaticos. Alem disso,
e mostrado o conteudo de modelagem e controle classico aplicado em conversores em geral.
Casale et al. (2002) elaboram uma metodologia para obtencao dos parametros do contro-
lador considerando uma regiao de tolerancia factivel com os dispositivos fısicos existentes,
como resistores e capacitores para o controlador analogico. Cita-se tambem que Garcera et al.
(2002) fazem a analise de projeto de controle do conversor CC-CC considerando as incertezas
parametrica do processo, visando o projeto de um controlador robusto.
Todorovic et al. (2004) fazem uma analise dos parametros de entrada e de saıda do conver-
sor para o projeto do controlador. Seu trabalho considera uma faixa de variacao das tensoes de
entrada e de saıda, pois seu conversor e projetado para satisfazer as condicoes de operacao de
um painel fotovoltaico.
O livro de Sira-Ramırez e Silva-Ortigoza (2006) aborda o conceito de conversores pela
modelagem nao linear e pela modelagem linearizada do conversor. Alem disso, sua teoria
considera que os parametros dos conversores sao variantes. Bryant e Kazimierczuk (2007)
fazem uma analise de projeto dos conversores usando o modo de conducao contınua - MCC.
Este conceito e abordado tambem na literatura da eletronica de potencia de Erickson (2001),
Mohan (1995, 2003).
Os trabalhos feitos por Bascope e Barbi (2000), Torrico-Bascope et al. (2006a, 2006b,
2006c) fazem analise do principio de funcionamento do conversor boost de alto ganho de tensao
com celula de comutacao de tres estados . De Torrico-Bascope et al. (2006a), foi publicado o
trabalho de Araujo et al. (2010), que trata-se da generalizacao do conceitos do conversor boost
de alto ganho com comutacao em 3 estados. Este trabalho aborda os conceitos fundamentais
para o projeto fısico do conversor de acordo com as especificacoes exigidas. Arango et al.
(2005) fazem a aplicacao do controle LQR em um conversor boost do tipo interleaved, sendo
entao uma estrategia de controle otimo em variacoes dos choppers classicos.
Orellana-Lafuente et al. (2010), Reis et al. (2011), Reis (2012) aplicam os conceitos de con-
versores de alto ganho de tensao de Torrico-Bascope et al. (2006a, 2006b), utilizando os mes-
mos parametros de projeto, contudo com estrategias de controle diferentes. Orellana-Lafuente
et al. (2010) usam dos metodos classicos de projeto de conversores boost, enquanto Reis et al.
(2011), Reis (2012) faz uso do controle LQR com acao integral via resolucao da equacao de
Riccati para obter os parametros do controlador. O trabalho deste e inspirado em Gezgin et al.
(1997) e nas referencias classicas da teoria do controle.

1.1 Estado da arte sobre os temas 3
1.1.2 Estado da arte sobre as Desigualdades Matriciais Lineares e a teoriado controle
Os livros de Ogata (1986), Dorf e Bishop (1998), Chen (1999), Ogata (2003), apesar de
fazerem parte da literatura classica da teoria do controle, abordam teorias fundamentais para
os projetos dos controladores. Entre estas teorias estao as topologias de controle por servo-
mecanismo ou modelo interno de controle, que sao topologias que visam anular a acao de
um determinado sinal persistente. Alem disso, Maciejowski (1989), Shahian e Hassul (1993)
tambem sao considerados livros que abordam a teoria classica do controle. Contudo, sua teoria
aborda os conceitos de controle robusto e analise das incertezas do processo, assim como Dorf
e Bishop (1998), Skogestad e Postlethwaite (2005).
O artigo de Bernussou et al. (1989) mostra os procedimentos de programacao para pro-
blemas envolvendo estabilidade quadratica. Trata-se de um trabalho relevante, pois relaciona
os teoremas de Lyapunov e programacao linear para resolucao de problemas de estabilidade.
A metodologia de programacao empregada neste artigo e base para diversos problemas de
otimizacao por LMIs. Alem disso, Peres (2011) possui um conjunto de materiais didaticos
sobre LMIs baseadas nas principais referencias bibliograficas relacionadas ao assunto.
Ghaoui et al. (1992) mostram uma metodologia para solucao do regulador linear quadratico
- LQR - utilizando desigualdade de Lyapunov via LMIs. Este trabalho apresenta um algoritmo
de resolucao desta metodologia por meio de programacao linear.
Os trabalhos de Boyd et al. (1994), Gahinet et al. (1995) sao o marco inicial para o conhe-
cimento sobre as LMIs. O material de Boyd et al. (1994) aborda os conceitos fundamentais
de LMIs e seu uso em situacoes que mostra a necessidade de restricao matematica. Ja Gahi-
net et al. (1995) mostram os conceitos de LMIs aplicado a programacao semi definida. Alem
disso, aborda os teoremas de estabilidade Lyapunov, complemento de Schur e a teoria da D-
estabilidade atraves do LMI Control Toobox, que e uma ferramenta computacional do MATLAB
capaz de resolver problemas via LMIs.
Chilali e Gahinet (1996) apresentam uma nova metodologia de resolucao de problemas
com controle H∞ utilizando restricoes por alocacao de polos otimizados via LMIs. A inovacao
deste trabalho esta no emprego de uma metodologia versatil de otimizacao, pois um conjunto
de restricoes fısicas de projeto no ambito da estabilidade pode ser modelado matematicamente
via restricoes LMIs.
Deve-se citar ainda que Feron et al. (1996), Wang e Burnham (2002) fazem uma analise de
estabilidade via LMIs de sistemas modelados por sistemas lineares com parametros variantes -
LPVs. Este tipo de analise e relevante pois permite que sistemas fısicos sejam modelados con-
siderando parametros variantes e seus controladores possam ser projetados de modo a satisfazer

1.1 Estado da arte sobre os temas 4
tais variacoes.
Os trabalhos de Trofino (2000), Trofino et al. (2003) constituem uma referencia didatica
sobre LMIs. Suas referencias sao compilacoes resumidas de controle otimizado via desigual-
dades matriciais lineares. Em sua teoria sao abordados controles por alocacao de polos, LQR,
H2-H∞, estabilidade e controle via LMIs em sistemas LPV e filtro de Kalman via LMIs. Alem
disso, seus trabalhos fazem mencao ao trabalho de Dullerud e Paganini (2000), que aborda a
resolucao de sistemas LMIs por otimizacao convexa.
O trabalho de Souza (2002) trata de uma aplicacao sobre LMIs voltada para os aspectos
computacionais. Seu trabalho propoe melhorias de otimizacao LMIs em sistemas modelados
no tempo contınuo e discreto, principalmente em sistemas mal condicionados.
Zanchin (2003) faz aplicacao do conceito de LMIs em geracao distribuıda. Seu trabalho
usa o controle H∞ via LMI por sistemas descritores em geradores sıncronos ligados a rede.
Johnson e Erkus (2005) aplicam os conceitos de LMIs em um sistema de amortecimento
massa-mola.
O livro de Skogestad e Postlethwaite (2005) tambem faz breve estudo sobre LMIs, com
enfase na aplicacao em controle H∞. A ferramenta de otimizacao abordada nessa bibliografia e
o LMI Control Toolbox de Gahinet et al. (1995). Cita-se ainda que sua bibliografia aborda os
conceitos fundamentais de incertezas estruturadas e nao estruturadas.
Alem disso, o trabalho de Faria (2005) trata o controle por realimentacao de estados por
alocacao de polos via LMIs, em que Faria () tambem possui um tutorial voltado para o publico
leigo no assunto sobre LMIs. Trata-se de um tutorial didatico que e bastante amigavel para o
aprendizado sobre controle e estabilidade via otimizacao por LMIs, pois aborda a teoria jun-
tamente com a aplicacao computacional. Este tutorial tambem faz uso do MATLAB e das
ferramentas de otimizacao SeDuMi e Yalmip , alem de ensinar a correta instalacao destes oti-
mizadores. Cita-se ainda que o mesmo autor possui uma tese utilizando controle por alocacao
de polos via LMIs por realimentacao derivativa (FARIA, 2009).
O trabalho de Ko et al. (2006) constitui-se numa aplicacao do controle LQR via LMIs de
Ghaoui et al. (1992). Esse trabalho aplica os conceitos de controle otimo via LMIs num sistema
de aerogeradores de maquinas assıncronas de dupla excitacao. Alem disso, Olalla et al. (2009)
aplicam os conceitos de LQR via LMIs em conversores estaticos CC-CC, sendo uma referencia
importante para esta dissertacao. Este trabalho inspirou Montagner e Dupont (2010) fazer a
mesma aplicacao sendo usado uma busca de parametros Q e R por Algoritmos Geneticos para
otimizar a resposta no tempo.
Os trabalhos de Filho (2007), Assuncao et al. (2007) trata de aplicacoes voltadas para o
controle por alocacao de polos e zeros via LMIs. Inspirados por Chilali e Gahinet (1996), sao

1.2 Revisao bibliografica 5
trabalhos que propoem o conceito de controle por alocacao de polos e modificacao de zeros via
LMIs.
A dissertacao de Gabe (2008) faz uso do controle H∞ em inversores com filtro LCL. Este
trabalho aplica o controle robusto via LMI em conversores de potencia semelhante ao trabalho
de Olalla et al. (2009).
O livro de Palhares e Goncalves (2008), possui uma abordagem didatica e bastante aplicada,
sendo util para aplicacoes na area de controle e automacao. Tal literatura contem teorias LMI
de Boyd et al. (1994), Gahinet et al. (1995), Chilali e Gahinet (1996).
O minicurso de Oliveira e Peres (2010) e um pequeno tutorial voltado para ensino e aplicacao
das LMIs no controle e na estabilidade de sistemas lineares. Ele consiste em aplicacoes vol-
tadas para o publico leigo no assunto sobre LMIs. Este minicurso faz uso do MATLAB e das
ferramentas de otimizacao SeDuMi e Yalmip .
1.2 Revisao bibliografica
Middlebrook e Cuk (1976) oferecem uma modelagem alternativa no modelo de espaco de
estados medio no MCC. Observa-se ainda que as matrizes modeladas no formato x = Ax+Bu,
y = Cx+Du assumirao condicoes incomuns, pois existe D 6= 0 para o modelo do conversor
boost. Esta modelagem nao foi abordada nem por Reis et al. (2011), nem pelos autores Olalla
et al. (2009), Montagner e Dupont (2010), estes por sua vez apresentaram uma modelagem
simplificada e ideal dos conversores. O modelo Middlebrook e Cuk (1976), no entanto, oferece
uma modelagem mais completa, considerando as perdas em todos os componentes do conversor.
A condicao D 6= 0 torna a solucao de uma estrategia de controle mais complexa. Para
contornar este problema, muitos autores utilizam modelos linearizados em que D= 0. Contudo,
considerando as condicoes que geraram D 6= 0, deve-se projetar uma estrategia de controle que
resolva este problema.
Os trabalhos de Boyd et al. (1994), Gahinet et al. (1995), Chilali e Gahinet (1996), Palhares
e Goncalves (2008) mostram teorias que podem ser facilmente aplicadas no controle de con-
versores CC-CC utilizando restricoes LMIs. Alem disso, deve-se considerar que para garantir
os conceitos de estabilidade robusta dentro das especificacoes desejadas, os criterios de robus-
tez devem ser satisfeitos de acordo com Maciejowski (1989), Shahian e Hassul (1993), Dorf e
Bishop (1998), Chen (1999), Skogestad e Postlethwaite (2005).
Os trabalhos de Olalla et al. (2009), Montagner e Dupont (2010) mostraram que e possıvel
aplicar os conceitos de LMIs como estrategias de controle para seus respectivos conversores
CC-CC. Deve-se considerar que, para projeto de conversores, existem limitacoes de projeto e
limitacoes fısicas de implementacao. A princıpio, tais autores utilizaram parte destes conceitos

1.3 Objetivos e contribuicoes deste trabalho 6
para o projeto de seus controladores. Contudo, tais autores nao consideraram os efeitos das
incertezas em seus trabalhos. Apenas usaram o conceito de politopos, nao sendo condicoes
necessarias e suficientes que atestam que seus sistemas sao robustos.
Cita-se ainda que, apesar da solucao LQR destes autores se mostrarem eficazes em seus
trabalhos, nao foram feitas analises mais profundas a respeito dos autovalores encontrados e seu
comportamento na frequencia. Isto porque, frequencias de canto em malha fechada proximo a
frequencia de chaveamento PWM podem comprometer o desempenho do conversor. Portanto,
apesar de seus trabalhos oferecerem propostas alternativas as estrategias de controle classico, e
possıvel desenvolver tecnicas mais bem elaboradas que considerem as limitacoes de projeto e
garantam a robustez do processo.
Reis et al. (2011), Reis (2012) apresentaram uma modelagem alternativa ao modelo classico
aplicado em conversores CC-CC, semelhante as modelagens de Olalla et al. (2009), Montagner
e Dupont (2010), porem considerando perdas no capacitor e levando-se em consideracao que
o conversor proposto e bem mais complexo, porque trata-se de um conversor boost com alto
ganho de tensao e com celula de comutacao em 3 estados. Portanto exige mais cuidado do
ponto de vista de modelagem e implementacao. Seu trabalho faz uso do controle LQR com
acao integral via equacao de Riccati. Deste modo, a estrategia de controle e o controle otimo
LQI. O controle otimo considera a minimizacao do ındice de desempenho como parametro
sistematico para a garantia de uma resposta eficiente para o processo(CHEN, 1999; OGATA,
2003). No entanto, seus parametros de carga e tensao de entrada sao variaveis e em seu trabalho
considera-se o ponto de operacao em plena carga. Esta condicao de operacao e considerada
comum na modelagem de conversores CC-CC (MOHAN, 1995; ERICKSON, 2001; MOHAN,
2003; ARANGO et al., 2005; ORELLANA-LAFUENTE et al., 2010).
1.3 Objetivos e contribuicoes deste trabalho
1.3.1 Objetivos deste trabalho
• Aplicar os conceitos de otimizacao via LMI com D-estabilidade no conversor boost de
alto ganho de tensao com celula de comutacao de tres estados utilizando as estrategias
de controle D-LQI e D-Alocacao robusta de acordo com Palhares e Goncalves (2008),
Boyd et al. (1994), Gahinet et al. (1995), Chilali e Gahinet (1996) utilizando o modelo
no espaco de estados medio(MIDDLEBROOK; CUK, 1976);
• Analisar as incertezas do processo bem como as restricoes na frequencia e estabelecer as
estrategias de controle de acordo com tais restricoes, isso com base nos parametros de
implementacao do conversor de acordo com Reis et al. (2011), Reis (2012), ;

1.4 Resumo dos capıtulos 7
• Fazer a analise teorico experimental das estrategias de controle aplicadas, levando-se em
consideracao a viabilidade do conceito fundamentado na teoria em uma situacao real.
1.3.2 Contribuicoes deste trabalho
Mostrar que os controles robustos D-Alocacao de polos e D-LQI otimizados via LMIs sao
estrategias de controle validas e eficazes no controle do conversor boost de alto ganho de tensao
com celula de comutacao de tres estados , considerando-se as incertezas nos parametros da
tensao de entrada e variacao da potencia da carga e a modelagem no espaco de estados medio
com D 6= 0. Isto e comprovado via simulacao e experimentalmente e esta fundamentado nos
trabalhos citados nesta dissertacao, comprovando-se como um controle estavelmente robusto
conforme exigido na literatura.
1.3.3 Publicacoes em congressos
Vide Costa et al. (2012).
1.4 Resumo dos capıtulos
Alem da introducao, os resumo dos capıtulos sao:
• Capitulo 2: mostra a teoria de LMI. E abordada tambem os teoremas de estabilidade de
Lyapunov e o conceito de complemento de Schur, alem dos conceitos de estabilizacao e
malha fechada e incerteza politopica. Mostra-se ainda a teoria de minimizacao LQR oti-
mizado via LMIs e os conceitos de D-estabilidade e sua aplicacao no LQR e na alocacao
de polos, desenvolvendo o D-LQR e a D-Alocacao de polos.
• Capıtulo 3: neste capıtulo sao abordados os conceitos de conversores classicos e do con-
versor original, e mostrado ainda os parametros do conversor original e a sua reducao do
modelo equivalente. Alem disso aborda a modelagem no espaco de estados e as analises
de incertezas do processo.
• Capıtulo 4: Estuda as estrategias de controle aplicado ao conversor, mostra a topologia
do servomecanismo com acao integral e a aplicacao das estrategias de controle D-LQI e
a D-Alocacao de polos robusto, alem dos procedimentos de otimizacao.
• Capıtulo 5: apresentam os resultados numericos das matrizes no espaco de estados medio
bem como os resultados numericos dos ganhos de realimentacao de estados. Alem disso,
mostra os resultados das funcoes de transferencia das incertezas, alem da analise dos
resultados de simulacao feitos no PSIM-MATLAB .

1.5 Consideracoes finais 8
• Capıtulo 6: faz-se a analise dos resultados experimentais das estrategias de controle apli-
cadas ao conversor conforme as especificacoes de projeto.
• Capıtulo 7: trata-se as conclusoes sobre o estudo do conversor como tambem analisa os
efeitos das estrategias de controle adotadas sobre a planta com os criterios de robustez.
Alem disso, sao mostradas propostas para trabalhos futuros.
• Apendice A: e um pequeno tutorial que ensina o uso dos pacotes Yalmip e SeDuMi e sao
tambem mostrados os procedimentos de instalacao, bem como o uso dos tais pacotes com
exemplos aplicados no MATLAB .
1.5 Consideracoes finais
Neste capıtulo e mostrado sobre o estado da arte sobre os temas alem dos trabalho que
motivaram a producao desta dissertacao. Com base nos cumprimentos dos objetivos desta
dissertacao, os capıtulos seguintes mostrarao as bases teoricas necessarias alem da formulacao
das estrategias de controle, alem dos resultados de simulacao e resultados experimentais. Todos
estes topicos foram brevemente resumidos na Secao 1.4 com o objetivo de orientar o leitor a
respeito da organizacao deste trabalho.

9
2 Teoria das Desigualdades Matriciais Linearesno Controle por Alocacao de Polos e LQR
Este capıtulo visa mostrar os conceitos iniciais e basicos necessarios para formulacao das
LMIs. Sao abordados os conceitos de Teorema de Lyapunov no modelo no espaco de estados
e a obtencao do ganho de realimentacao por meio do tal teorema e a definicao de politopos.
Cita-se tambem o conceito do LQR otimizado via LMIs, alem da definicao de regioes LMI via
D-estabilidade, que pode ser utilizada tanto na alocacao de polos como no LQR. Alem disso,
sao mostrados os conceitos de incertezas e sua finalidade em relacao ao conceito de politopos e
a extracao do modelo das incertezas atraves da planta com variacoes politopicas.
2.1 Introducao as desigualdades matriciais lineares - LMIs
As desigualdades matriciais lineares (LMIs) e tecnicas LMI surgiram como poderosas ferra-
mentas de projeto em areas que vao desde a engenharia de controle para o sistema a identificacao
e concepcao estrutural (GAHINET et al., 1995). Tres fatores fazem com que tecnicas LMI se-
jam atraentes:
• Uma variedade de especificacoes de projeto e restricoes podem ser expressas como LMIs.
• Uma vez formulado em termos de LMIs, um problema pode ser resolvido exatamente
pela eficiencia dos algoritmos de otimizacao convexa (os “resolvedores LMI”).
• Enquanto a maioria dos problemas com multiplas restricoes ou objetivos carecem de
analise de solucoes em termos de equacoes matriciais, estes muitas vezes permanecem
trataveis nos quadros LMIs. Isso faz com que o projeto baseado em LMIs seja uma alter-
nativa valiosa para classicos metodos “analıticos”.
A historia das LMIs comeca em aproximadamente 1890, quando Lyapunov publicou sua
obra, uma introducao, do que hoje e conhecida por teoria de Lyapunov. Ele mostrou que uma
equacao diferencial do tipodx(t)
dt= Ax(t)

2.1 Introducao as desigualdades matriciais lineares - LMIs 10
e estavel se e somente se existir uma matriz P semi definida positiva (isto e, P > 0) de modo
que
A′P+PA < 0.
A condicao que Lyapunov desenvolveu e denominada de estabilidade de Lyapunov em P, que
e uma forma especial de LMI. Alem disso Lyapunov mostrou que dado um ponto de operacao
Q = Q′ > 0, na equacao A′P+PA = −Q existe um P > 0 em que a equacao diferencial citada
e estavel. Logo, a LMI usada pela primeira vez para analisar a estabilidade de um sistema
dinamico foi a desigualdade de Lyapunov, que pode ser resolvido analiticamente (BOYD et al.,
1994). Portanto, um resumo dos principais acontecimentos na historia de LMIs na teoria de
controle desde a resolucao da primeira LMI segue-se entao:
• 1890: Surge a primeira LMI. Uma solucao analıtica por LMI atraves da equacao de Lya-
punov.
• Decada de 1940: Aplicacao de metodos de Lyapunov para engenharia de problemas de
controle real. Pequenas LMIs resolvidas “a mao”.
• Inıcio da decada de 1960: Lema Positivo-Real da tecnicas graficas para resolver uma
outra famılia de LMIs.
• Final da decada de 1960: A observacao de que a mesma famılia de LMIs pode ser resol-
vida atraves da resolucao de uma Equacao Algebrica de Riccati (Algebric Riccati Equa-
tion - ARE).
• Inıcio da decada de 1980: Reconhecimento de que muitas LMIs podem ser resolvidas por
computador atraves de programacao convexa.
• Final da decada de 1980: Desenvolvimento de algoritmos dos pontos interiores para
resolucao de LMIs.
Atualmente, tem-se desenvolvido maneiras de resolver uma forma geral de LMIs (BOYD
et al., 1994). Um exemplo de LMI classico e a resolucao da equacao de Riccati (OGATA, 2003;
DORF; BISHOP, 1998), que e utilizada para busca do ganho otimo LQR, e dada por
A′P+PA+Q−PBR−1B′P < 0. (2.1)
Em 1971, J. C. Willems,de (2.1) propos a seguinte LMI para (2.1):[A′P+PA+Q PB
B′P R
]< 0. (2.2)

2.1 Introducao as desigualdades matriciais lineares - LMIs 11
A expressao (2.2) foi obtida pela autodecomposicao da matriz Hamiltoniana (BOYD et al.,
1994), que e a composicao original da equacao de Riccati.
Seja a seguinte equacao diferencial do tipo
dx(t)dt
= Aix(t), (2.3)
em que o subındice i indica varios pontos de operacao de A ou politopos. Do ponto de vista
fısico, isto e uma incerteza do tipo parametrica. Portanto, o teorema de Lyapunov pode ser
generalizado de modo a encontrar P > 0 estavel, sendo que
A′1P+PA1 < 0,
A′2P+PA2 < 0,...
A′iP+PAi < 0,...
A′nP+PAn < 0,
(2.4)
em que existem n incertezas, cada incerteza pode ser considerada um ponto de operacao,
matematicamente, um politopo. Dado um conjunto n de politopos, existira uma solucao factıvel
se e somente se o conjunto politopo for convexo. Na Figura 2.1(a), e ilustrada uma regiao a
solucao P > 0 encontra-se fora da regiao politopica valida, portanto esta solucao e infactıvel. Ja
na Figura 2.1(b), e mostrada que a solucao P > 0 encontra-se dentro da ragiao politopica valida,
sendo entao uma solucao factıvel.
(a) Solucao nao factıvel. (b) Solucao factıvel.
Figura 2.1: Solucao de politopos via LMIs.
No entanto, o conceito de factibilidade e bem mais abrangente. O sistema e considerado
factıvel, se somente se forem satisfeitas todas as condicoes de restricoes impostas(BOYD et al.,
1994; GAHINET et al., 1995). A ilustracao da Figura 2.1 apenas mostra uma pequena aplicacao
da factibilidade em regioes LMIs.

2.2 Conceitos basicos de LMIs 12
2.2 Conceitos basicos de LMIs
Definicao 2.1 Uma desigualdade matricial linear (Linear Matrix Inequalities - LMI) e descrita
pela seguinte expressao (BOYD et al., 1994):
F(x) = x1F1 + x2F2 + x3F3 + . . .+ xmFm ≥−F0 (2.5)
ou
F(x) = F0 +m
∑k=1
xiFi,≥ 0 (2.6)
sendo x ∈ Rm e F(x) e uma funcao afim, em que Fi ∈ Rn×m, i = 0, ...,m sao matrizes simetricas
semi-definidas positivas. Umas das suas caracterısticas e apresentar o formato simetrico
em suas matrizes. A restricao em (2.6) consiste numa restricao convexa, isto e, o conjunto
x|F(x)≥ 0 e convexo.
E importante enfatizar que uma LMI pode ser representada de varias formas e dificilmente
aparece num problema na forma generica afim (2.6). Por exemplo, dada uma matriz A e uma
matriz Q ≥ 0, a funcao matricial F(P) = A′P+PA+Q, que aparece em varios problemas de
estabilidade, e afim na variavel P e, portanto a desigualdade F(P)≤ 0 e uma LMI que pode ser
facilmente reescrita na forma (2.6), em que x e o vetor contendo os elementos da matriz P a ser
obtida. A vantagem da representacao em (2.6) e que toda LMI pode ser reescrita nessa forma
e, portanto, todos os algoritmos de resolucao de LMIs sao desenvolvidos nessa representacao.
Existem diversos pacotes de resolucao LMI que podem ser usados para resolver problemas
relacionados as desigualdades matriciais lineares. Segundo Palhares e Goncalves (2008), os
resolvedores mais conhecidos para problemas que usam de LMI sao:
• LMILAB: instalado no Matlab, e uma referencia muito conhecida no estudo de LMIs.
Seu metodo de resolucao foi desenvolvido por Nesterov e Nemirovski em 1994, tambem
disponibilizado em 1994. O manual de resolucao do LMILAB foi escrito por Gahinet et
al. (1995) e e uma base bibliografica muito citada em trabalhos com LMIs;
• LMITOOL: disponibilizado no software livre do Scilab, e um pacote matematico amigavel,
baseado no metodo de resolucao por programacao semi definida desenvolvido por Van-
denberghe e Boyd 1996;
• SeDuMi: e um pacote de otimizacao de matrizes semi definidas desenvolvido por Jos
Sturm. Alem disso, o SeDuMi e de uso bastante amigavel e versatil em diversas interfa-
ces para resolucao matematicas de problemas com LMIs, como o YALMIP e o proprio
LMILAB;

2.3 Estabilidade de Lyapunov via LMIs 13
• LMISol: e um pacote de otimizacao desenvolvidos pelos brasileiros Oliveira, Farias e
Geromel em 1997;
• SDPT3: e um pacote desenvolvido para problemas de programacao conica por K.C. Toh,
R. H. Tutuncu e M. J. Todd.
2.3 Estabilidade de Lyapunov via LMIs
A Estabilidade de Lyapunov na teoria do controle e formulada inicialmente no conceito
da equacao homogenea simples linearizada em um ponto de operacao qualquer e uma funcao
de Lyapunov tıpica. Esta funcao e derivada em um ponto de qualquer ou nulo. A busca da
solucao desta funcao e obtida via otimizacao LMI. As definicoes utilizadas seguem as mode-
lagens classicas da teoria do controle (OGATA, 1986; CHEN, 1999; MACIEJOWSKI, 1989;
SKOGESTAD; POSTLETHWAITE, 2005) e da teoria do controle otimizado via LMIs (BOYD
et al., 1994; GAHINET et al., 1995).
Definicao 2.2 Considere o seguinte sistema linear invariante no tempo (LTI) modelado no
espaco de estados do tipo
x(t) = Ax(t). (2.7)
Definicao 2.3 Seja o modelo definido em (2.7) submetido a uma funcao de Lyapunov do tipo
(OGATA, 1986; CHEN, 1999):
V (x) = x′Px > 0, (2.8)
conhecida como funcao de quadratica positiva. Em que P > 0 e hermitiana, real e simetrica.
Para encontrar seu ponto de equilıbrio, (2.8) e derivada de modo que
V (x) = x′(A′P+PA
)x. (2.9)
Proposicao 2.0.1 Para garantir o criterio da estabilidade assintotica para sistemas LTI, e ne-
cessario que (2.9) seja negativa, portanto
V (x) = x′(A′P+PA
)x < 0⇒ A′P+PA < 0. (2.10)
Generalizando (2.10) segundo Ogata (1986), Chen (1999), Palhares e Goncalves (2008), vem
V (x) = x′(A′P+PA
)x <−x′ (N)x⇒ A′P+PA <−N. (2.11)
Para que (2.11) seja satisfeita para todo Ai, i = 1,2, ...,m com base em (2.5), (2.11) torna-se
A′iP+PAi <−N, P > 0,∀x 6= 0, (2.12)

2.4 Politopos 14
que e o criterio da estabilidade de Lyapunov descrito para desigualdades.
Teorema 2.1 (Estabilidade de Lyapunov) (OLIVEIRA; PERES, 2010; BOYD et al., 1994;
GAHINET et al., 1995) Dado o sistema do tipo x = Ax, existe uma solucao P > 0 simetrica
de modo que A′P+PA+N < 0,∀x 6= 0, sendo N > 0 simetrica, uma matriz arbitraria forcada
ao ponto de operacao.
Corolario 2.1.1 Do Teorema 2.1, dado o sistema do tipo x =n∑
i=1Aix, n ∈N, existe uma solucao
P > 0 simetrica de modo que A′iP+PAi +N < 0,∀x 6= 0, sendo N > 0 simetrica, uma matriz
arbitraria.
Portanto, o processo de otimizacao via restricao por LMI e dado por:minP=P′
trP
su jeitoa :P > 0
(A′P+PA)<−Q
(2.13)
ou minP=P′
trP
su jeitoa :P > 0
(A′iP+PAi)<−Q, i = 1,2, ...,m , m ∈ N
, (2.14)
em que (2.14) e aplicado quando existe um conjunto de matrizes conhecido como politopos.
Este tipo de conhecimento e bastante util para se determinar a estabilidade de modelos que
contem uma faixa de incertezas, definida como incertezas politopicas.
2.4 Politopos
Definicao 2.4 (GAHINET et al., 1995; PALHARES; GONCALVES, 2008) Um politopo consiste
num conjunto poliedral limitado e e uma casca convexa de um conjunto finito de vertices , sendo
que todo elemento no politopo pode ser gerado pela combinacao convexa dos seus vertices.
Considere um politopo descrito por 5 vertices na Figura 2.2, mostrado por Palhares e
Goncalves (2008), em que P = cov1,v2, ...,v5 (co - casca convexa). Qualquer ponto p ∈P
pode ser descrito na forma convexa dos vertices p =5∑
i=1αivi, αi ≥ 0,
5∑
i=1αi = 1. A propriedade
de convexabilidade e suficiente para que possa formular a estabilidade de um sistema incerto
verificando a estabilidade em um politopo e usando a teoria de estabilidade de Lyapunov.

2.5 Complemento de Schur 15
Teorema 2.2 (GAHINET et al., 1995; PALHARES; GONCALVES, 2008) Dado um sistema
incerto com k vertices:
∆[x(t)] = Ax(t), A ∈P∆=
A|A =
k
∑i=1
αiAi, , αi ≥ 0,k
∑i=1
αi = 1
. (2.15)
O sistema incerto descrito por (2.15) pode ser dito quadraticamente estavel se, para sistemas
de tempo contınuo, existe uma matriz P = P′> 0, tal que A′P+PA < 0, ∀A∈P ou A′iP+PAi <
0, ∀i = 1,2, ...,k, que e a demonstracao do processo de otimizacao descrito em (2.14).
Figura 2.2: Exemplo de um politopo de 5 vertices (PALHARES; GONCALVES, 2008).
Na teoria do controle, sistemas nao lineares podem ser linearizados em varios pontos de
operacao. Cada ponto de operacao pode ser considerado um politopo, que e uma condicao de
estabilidade a ser satisfeita. Tais aplicacoes podem ser vistas em Bernussou et al. (1989), Ko et
al. (2006), Rossi et al. (2007), Olalla et al. (2009), Oliveira e Peres (2010), Montagner e Dupont
(2010).
2.5 Complemento de Schur
O Complemento de Schur e um artifıcio matematico frequentemente usado para converter
uma desigualdade convexa em uma LMI ou vice-versa (PALHARES; GONCALVES, 2008;
BOYD et al., 1994; GAHINET et al., 1995; PERES, 2011; OLIVEIRA; PERES, 2010). Alem
disso, o complemento de Schur e ideal para casos em que estao presentes expressoes matriciais
nao lineares, convertendo-as em LMIs.
Lema 2.1 (Complemento de Schur) (BOYD et al., 1994) Seja a seguinte matriz de blocos
M =
[A B
C D
](2.16)

2.5 Complemento de Schur 16
sendo D uma matriz quadrada nao singular (ou seja, D−1 6= 0). O complemento de Schur de D
em M, denotado por (M/D), e definido por:
M =
[A B
C D
]= A−BD−1C⇒ (M/D) = A−BD−1C. (2.17)
Teorema 2.3 De (2.17), podem ser formuladas as seguintes expressoes:
(M\A) = D−CA−1B, (2.18)
(M\B) =C−DB−1A, (2.19)
(M\C) = B−AC−1D. (2.20)
Teorema 2.4 (PALHARES; GONCALVES, 2008) Do Lema 2.1. Para matrizes simetricas do
tipo:
M = M′ =
[M1 M2
M′2 M3
], (2.21)
o complemento de Schur e aplicado na seguinte forma:
(M\M1) = M3−M2M−11 M′2, (2.22)
(M\M3) = M1−M2M−13 M′2. (2.23)
As seguintes propriedades aplicadas ao conceito de complemento de Schur em (2.21) de
acordo com Palhares e Goncalves (2008), Oliveira e Peres (2010), Peres (2011) sao:
i. M = M′ > 0 se, somente se M1 > 0 e (M/M1)> 0 (ou M3 > 0 e (M/M3)> 0);
ii. Se M1 > 0, entao M = M′ ≥ 0, se, somente se (M/M1)≥ 0 (idem para M3 e (M/M3)).
Lema 2.2 Outra forma equivalente, usando as propriedades da transformacao de congruencia
conforme Oliveira e Peres (2010) e
M =
[M1 M2
M′2 M3
]⇔
[M1−M2M3M′2 0
0 M3
]. (2.24)
Isto para o caso da matriz arbitraria T definida por
T =
[I 0
−M′2M1 I
], (2.25)
sendo esta nao singular.

2.6 Estabilizacao 17
2.6 Estabilizacao
Definicao 2.5 Dado o sistema no espaco de estados do tipo:
x = Ax+Bu (2.26)
e o modelo de realimentacao de estados dado por
u =−Kx, (2.27)
substituindo (2.27) em (2.26), tem-se
x = (A−BK)x⇒ x = Ax. (2.28)
Corolario 2.4.1 (Estabilidade de Lyapunov Alternativa) Do Teorema 2.1, fazendo P = P−1
e multiplicando P−1 a esquerda e a direita a expressao (2.10), sendo P = P′ > 0, tem-se
A′P− PA < 0, (2.29)
logo
AP−PA′ < 0. (2.30)
Substituindo-se (2.28) em (2.30) tem-se
(A−BK)P+P(A−BK)′ < 0. (2.31)
Fazendo Y = KP em (2.31), proposto por Palhares e Goncalves (2008), Gahinet et al. (1995),
Boyd et al. (1994), Rossi et al. (2007), Oliveira e Peres (2010), Skogestad e Postlethwaite
(2005), segue-se entao que
(AP−BY )+(AP−BY )′ < 0 (2.32)
ou
AP+PA′−BY −Y ′B′ < 0. (2.33)
em que K = Y P−1, Y ∈ Rm×n e P = P′ > 0.
2.7 Controle LQR via otimizacao LMI
Definicao 2.6 (Linear Quadratic Regulator - LQR) (OGATA, 2003; DORF; BISHOP, 1998)
O regulador linear quadratico consiste no metodo sistematico de controle por realimentacao

2.7 Controle LQR via otimizacao LMI 18
de estados baseado na minimizacao do ındice de desempenho quadratico
J =
∞∫0
(x′Qx+u′Ru
)dt. (2.34)
sendo Q e R sao as matrizes de ponderacao tal que Q = Q′ ≥ 0 e R = R′ > 0.
O ındice de minimizacao (2.34) utiliza-se da definicao de equacao de estados em (2.26). Ghaoui
et al. (1992) estabeleceu a proposicao 2.4.1.
Proposicao 2.4.1 (GHAOUI et al., 1992) O processo de otimizacao
minP,Z
tr (QP)+ tr (Z)
su jeitoa
AP+PA′−BY −Y ′B′+ I < 0[Z R1/2Y
Y ′R1/2 P
]> 0, P > 0
(2.35)
corresponde ao problema de solucao LQR, se a matriz de ponderacao R e simetrica definida
positiva, o par (A,B) e controlavel e o par (Q,A) e observavel.
Com base em Ghaoui et al. (1992), Olalla et al. (2009) segue o Teorema 2.5:
Teorema 2.5 (GHAOUI et al., 1992) A funcao custo em (2.34) e minimizada via LMI, se
minP,Z
tr (QP)+ tr (Z) e mınimo, de modo que Z e obtida atraves da desigualdade
[Z R1/2Y
Y ′R1/2 P
]> 0, P > 0. (2.36)
Prova 2.5.1 Usando-se os conceitos de minimizacao do ındice de desempenho LQR de (2.34)
e o conceito de realimentacao de estados em (2.27), substituindo em (2.34), tem-se
J =
∞∫0
(x′Qx+ xK′RKx
)dt =
∞∫0
x′(Q+K′RK
)xdt, (2.37)
aplicando o traco da matriz em ambos os lados, e utilizando-se a propriedade da comutativi-
dade do traco da matriz, de acordo com Ghaoui et al. (1992), Olalla et al. (2009), Ko et al.
(2006), segue-se que
tr(J) = tr
(Q+K′RK) ∞∫
0
xx′dt
, (2.38)
fazendo P =∞∫0
xx′dt e substituindo-o em (2.38), tem-se
tr(J) = tr((
Q+K′RK)
P)= tr
(QP+K′RKP
). (2.39)

2.8 Restricao LMI por D-estabilidade 19
Sendo Y = KP→ K = Y P−1, vem
tr(J) = tr((
Q+K′RK)
P)= tr
(QP+R1/2KPK′R1/2
); (2.40)
J = tr(
QP+R1/2Y P−1Y ′R1/2)
; (2.41)
J = tr (QP)+ tr(
R1/2Y P−1Y ′R1/2)
; (2.42)
J = tr (QP)+ tr(
R1/2Y P−1Y ′R1/2)
; (2.43)
J = tr (QP)+ tr (Z) . (2.44)
Sendo que
Z > R1/2Y P−1Y ′R1/2, (2.45)
aplicando-se o complemento de Schur em (2.45), tem-se
Z−R1/2Y P−1Y ′R1/2 > 0⇒
[Z R1/2Y
Y ′R1/2 P
]> 0. (2.46)
2.8 Restricao LMI por D-estabilidade
Na Secao 2.7 foi mostrada a otimizacao LMI aplicada no controle via LQR. A teoria de
Lyapunov pode ser estendida para tratar problemas de D-estabilidade em que se deseja ve-
rificar se todos os polos do sistema estao localizados em determinadas regioes convexas no
plano convexo. Isto e conhecido como regioes LMI (GAHINET et al., 1995; PALHARES;
GONCALVES, 2008).
Definicao 2.7 Regiao LMI e uma regiao convexa no plano complexo, denotada por D , simetrica
com respeito ao eixo real (GAHINET et al., 1995), definida por:
D∆=
z ∈ C|L+ zM+ zM′ < 0, (2.47)
sendo L = L′ e M matrizes reais.
Teorema 2.6 A funcao matricial
MD(A,P) = L⊗P+M⊗ (AP)+M′⊗ (AP)′ , (2.48)
em que⊗ e o produto de Kronecker de duas matrizes tal que V =W ⊗S e uma matriz de blocos
com cada bloco dado por Vi j = Wi jS. Segundo Gahinet et al. (1995), Palhares e Goncalves
(2008), a expressao (2.48) e estavel se, somente se existe P = P′ > 0 tal que
MD(A,P)< 0, P > 0. (2.49)

2.8 Restricao LMI por D-estabilidade 20
Corolario 2.6.1 Do Teorema 2.6. Seja o modelo simplificado com base em (2.47) (GAHINET
et al., 1995), de modo que
fD(z) = L+ zM+ zM′ < 0. (2.50)
Portanto, as regioes mais utilizadas em projetos de sistemas de controle com otimizacao
LMI sao mostradas de acordo com o Corolario 2.6.1 e na Figura 2.3:
(a) semiplano esquerdo, Re(z)< h1:
fD(z) =−2h1 + z+ z < 0;
(b) semiplano direito, Re(z)> h2:
fD(z) = 2h2− z− z < 0;
(c) disco centrado em (-q,0) e raio rr,|z− (−q)|< rr:
fD(z) =
[−rr q+ z
q+ z −rr
]< 0;
(d) setor conico com vertice na origem e angulo interno de 2θ , Re(z)tgθ < |Im(z)|:
fD(z) =
[(senθ)(z+ z) (cosθ)(z− z)
(cosθ)(z− z) (senθ)(z+ z)
]< 0.
Corolario 2.6.2 Do Teorema 2.1 e do Corolario 2.6.1. Para sistemas no tempo contınuo, sendo
D no semiplano esquerdo, de modo que fD(z) = z+ z < 0, fazendo a relacao de equivalencia
(2.49) em (2.30), para P > 0. Substituindo (1,z, z)↔(P,AP,(AP)′
)nas sentencas mostradas
de acordo com a Figura 2.3, tem-se
(a) semiplano esquerdo, Re(z)< h1|h1 ∈ R:
∀z ∈C, Re(z)< h1⇒−2h1P+AP+(AP)′ < 0; (2.51)
(b) semiplano direito, Re(z)> h2|h2 ∈ R:
∀z ∈C, Re(z)> h2⇒ 2h2P−(AP+(AP)′
)< 0; (2.52)
(c) disco centrado em (-q,0) e raio rr,|z− (−q)|< rr|rr ∈ R+:
∀q ∈ R+ | (−q,0) e raior ∈ R+⇒
[−rrP qP+AP
qP+(AP)′ −rrP
]< 0; (2.53)

2.8 Restricao LMI por D-estabilidade 21
(a) Restricao Re(z)< h1. (b) Restricao Re(z)> h2.
(c) Restricao limitada de raio rr, centro (-q,0)
(d) Restricao limitada de inclinacao2θ
Figura 2.3: Restricoes LMI.
(d) setor conico com vertice na origem e angulo interno de 2θ , Re(z)tgθ < |Im(z)|:[(senθ)
(AP+(AP)′
)(cosθ)
(AP− (AP)′
)(cosθ)
((AP)′−AP
)(senθ)
(AP+(AP)′
) ]< 0. (2.54)
Teorema 2.7 (PALHARES; GONCALVES, 2008; GAHINET et al., 1995)Dadas duas regioes
LMIs D1 e D2, a intersecao D = D1∩D1 e considerada tambem uma LMI, representada pela
seguinte funcao caracterıstica
fD = diag(
fD1 ∩ fD2
). (2.55)

2.9 Estabilizacao via D-estabilidade 22
2.9 Estabilizacao via D-estabilidade
Corolario 2.7.1 (ASSUNCAO et al., 2007; GAHINET et al., 1995) Da Definicao 2.5,do Co-
rolario 2.6.2 e do Corolario 2.4.1. Considere o problema de estabilizacao em malha fechada
para regioes LMI. Utilizando-se a expressao (2.28) e substituindo-se em (2.51), (2.52), (2.53) e
(2.54), fazendo Y = KP tem-se que
(a) semiplano esquerdo, Re(z)< h1:
∀z ∈C, Re(z)< h1⇒−2h1P+(AP−BY )+(AP−BY )′ < 0; (2.56)
(b) semiplano direito, Re(z)> h2:
∀z ∈C, Re(z)> h2⇒ 2h2P−(AP−BY +(AP−BY )′
)< 0; (2.57)
(c) disco centrado em (-q,0) e raio rr,|z− (−q)|< rr:
∀q ∈ R+ | (−q,0) e raior ∈ R+⇒
[−rrP qP+(AP−BY )
qP+(AP−BY )′ −rrP
]< 0; (2.58)
(d) setor conico com vertice na origem e angulo interno de 2θ , Re(z)tgθ < |Im(z)|:[(senθ)
(AP−BY +(AP−BY )′
)(cosθ)
(AP−BY − (AP−BY )′
)(cosθ)
((AP−BY )′− (AP−BY )
)(senθ)
(AP−BY +(AP−BY )′
) ]< 0. (2.59)
As equacoes (2.56), (2.57), (2.58) e (2.59) podem ser usadas tanto para alocacao de polos
(ROSSI et al., 2007; FILHO, 2007; ASSUNCAO et al., 2007) como para possıvel restricao de
autovalores em determinadas situacoes de controle, como abordados por Palhares e Goncalves
(2008), Boyd e Barratt (1991), Gahinet et al. (1995).
2.9.1 Controle LQR com restricao LMI via D-estabilidade - D-LQR
Para fazer o controle LQR via D-estabilidade por LMI,D-LQR, basta fazer a intersecao das
suas funcoes caraterısticas de restricao conforme (2.55). Deste modo, para controle LQR sao
usadas as expressoes (2.44), (2.46), P = P′ > 0 e caso seja desejado o LQR com restricao de:
• Re(z)< h1, acrescenta-se (2.56) no processo de restricao;
• Re(z)> h2, acrescenta-se (2.57) no processo de restricao;
• centrado em (-q,0) e raio rr, acrescenta-se (2.58) no processo de restricao;

2.10 Analise das incertezas politopicas 23
• setor conico com vertice na origem e angulo interno de 2θ , Re(z)tgθ < |Im(z)|, acrescenta-
se (2.59) no processo de restricao.
Caso seja necessario fazer algumas restricoes adicionais, basta acrescentar os termos de
restricao no processo. No entanto, o processo de restricao deve respeitar os limites impostos
pela planta, ou seja, estes limites devem obedecer os limites fısicos do modelo em estudo, caso
contrario, o problema pode se tornar nao factıvel(nao existe solucao possıvel) ou existir solucao,
mas esta nao e satisfatoria.
2.10 Analise das incertezas politopicas
Num sistema que envolve incertezas, estas podem ser modeladas de duas formas (SHAHIAN;
HASSUL, 1993):
• Incertezas estruturadas: e o tipo de incerteza cujos parametros possuem faixas e limites
de variacao que sao modelados em projeto, ou seja, as tolerancias sao especificadas e estas
participam para o projeto do controlador. Os politopos da Secao 2.4 sao consideradas
incertezas estruturadas.
• Incertezas nao-estruturadas: estas incertezas sao conhecidas por meio de incertezas
aditivas ou multiplicativas. Estas incertezas sao extraıdas da planta, seja um modelo dado
por G(s) e um modelo com incertezas do tipo G(s). Uma incerteza aditiva e dada por:
∆a(s) = G(s)−G(s), (2.60)
em que G(s) e um modelo adicionado as incertezas e ∆a(s) e o simbolo de incerteza
aditiva. O diagrama de blocos deste tipo de incerteza pode ser ilustrado pela Figura 2.4(a),
em que a incerteza e configurada pela camada de saıda, ou configurada pela camada de
entrada como na Figura 2.4(c). Uma incerteza multiplicativa e dada por:
∆m(s) =(
G(s)G(s)
−1), (2.61)
sendo que ∆m(s) e o simbolo da incerteza multiplicativa. O diagrama de blocos deste tipo
de incerteza e mostrado na Figura 2.4(b).
Deste modo, tem-se a regiao de incertezas estruturadas, que sao parametros limites de pro-
jeto do conversor. As incertezas nao estruturadas sao as funcoes de transferencia extraıdas de
acordo com os limites desses parametros. Em seu trabalho, Shahian e Hassul (1993) afirma
que, para garantir a robustez as incertezas do processo, o sistema deve admitir a rejeicao de

2.10 Analise das incertezas politopicas 24
(a) Incertezas aditivas. (b) Incertezas multiplicativas na camada de saıda.
(c) Incertezas multiplicativas na camada de en-trada.
Figura 2.4: Representacao em diagramas de blocos dos tipos de incertezas aplicado na planta(SHAHIAN; HASSUL, 1993).
disturbios e a supressao de ruıdos. As ferramentas utilizadas para fazer tais analises sao a
funcao de transferencia de sensibilidade, ou funcao sensibilidade S(s), e a funcao de sensibili-
dade complementar ou funcao co-sensibilidade T (s). A funcao sensibilidade e dada por
S(s) = (I +G(s)K(s))−1 , (2.62)
em que G(s) e modelo do processo e K(s) e a funcao de transferencia do controlador. Ja a
funcao co-sensibilidade e dada por
T (s) = G(s)K(s)(I +G(s)K(s))−1 , (2.63)
de modo que
S(s)+T (s) = I. (2.64)
A funcao T (s) e tambem conhecida como a funcao de transferencia de malha fechada de y(s)r(s) ,
sendo y(s) a saıda e r(s) e a referencia de rastreio. A analise das incertezas e da robustez
geralmente e estudada no domınio da frequencia, em sistemas do tipo SISO, usa-se as curvas de
Bode, para casos multivariaveis, faz-se uso das decomposicoes em valores singulares, SVD’s.
Tanto um como outro leva apenas em consideracao as magnitudes da funcao de transferencia
no domınio da frequencia.
A funcao sensibilidade mostra o quanto o sistema e capaz de rejeitar disturbios, que sao
caracterizados por serem perturbacoes com grandes amplitudes e de baixas frequencias. Ja a
funcao de sensibilidade complementar mostra a capacidade do sistema de suprimir os efeitos
do ruido, que sao perturbacoes de alta frequencia e de pequena amplitude. A Figura 2.5 mostra
cada uma das representacoes tipicas de S(s) e de T (s).

2.10 Analise das incertezas politopicas 25
(a) (b)
Figura 2.5: (a) Funcao sensibilidade S(s).(b) Sensibilidade complementar T (s).
Cita-se ainda que a analise de robustez em um sistema incerto deve garantir a estabilidade
das pertubacoes de incertezas aditivas a multiplicativas. Isto e justificado pelo teorema do ganho
minimo segundo Dorf e Bishop (1998), Shahian e Hassul (1993), Skogestad e Postlethwaite
(2005). Com base em Maciejowski (1989), Dorf e Bishop (1998), Shahian e Hassul (1993),
Skogestad e Postlethwaite (2005), a incerteza e limitada em magnitude, supondo que G(s) e
G(s) tenham o mesmo numero de polos no semiplano s da direita. Logo a estabilidade nao se
altera se
|∆a( jω)|<∣∣∣∣ 1K( jω)S( jω)
∣∣∣∣ ,ω ∈ [−∞,∞], (2.65)
para analise com incertezas aditivas e
|∆m( jω)|<∣∣∣∣ 1T ( jω)
∣∣∣∣ , ω ∈ [−∞,+∞], (2.66)
para analise com incertezas multiplicativas. O modelo de analise de estabilidade robusta pode
ser feita tanto usando incertezas aditivas como multiplicativas. No entanto, para uso mais
pratico, a analise por incertezas multiplicativas e mais comoda pois usa-se apenas a funcao
T(s), ja que nao e pratico obter o K(s) em servomecanismos com acao integral. Para este tra-
balho, e utilizada a analise por incertezas multiplicativas para a analise de robustez a para o
processo de otimizacao e utilizado o conceito de politopos.
Alem disso, deve-se considerar o desempenho na frequencia da funcao de transferencia do
modelo controlado em malha aberta, ou seja, o comportamento de |G( jω)K( jω)|. A Figura 2.6
mostra a curva desejavel para o modelo controlado do conversor.
Modelos de realimentacao no espaco de estados sem uso dos observadores de estado pos-
suem uma dificuldade matematica de extrair o K(s) no modelo em malha fechada. Um artificio
viavel e fazer G(s)K(s) = T (s)/S(s).
Sendo entao, para cada ponto operacao, seu modelo equivalente e dado por Gm, o modelo
padrao escolhido como modelo de controle e dado por G. Com base no sistema modelado no

2.11 Consideracoes finais 26
Figura 2.6: Curva desejavel da funcao de transferencia de malha aberta do de um sistema derealimentacao.
espaco de estado do tipo (OGATA, 2003)
x = Ax+Bu,
y =Cx+Du,(2.67)
transformado modelo de matriz de transferencia e dada por
G(s) =C (sI−A)−1 B+D. (2.68)
Portanto, para incertezas do tipo ∆m de (2.61) a matriz de transferencia e dada por
∆m(s) = ∆C (s∆I−∆A)−1∆B+∆D, (2.69)
em que ∆m(s) e a incerteza multiplicativa definida em (2.61).
2.11 Consideracoes finais
Neste capıtulo sao definidos os conceitos iniciais de LMI e de estabilidade quadratica de
Lyapunov. E apresentado o conceito de politopos e sua utilidade no processo de otimizacao
com varias restricoes. Ve-se ainda o processo de obtencao do ganho de realimentacao de esta-
dos. Observa-se que o modelo de estabilidade via LMI do Corolario 2.4.1 e aplicado tanto no
conceito do LQR via LMI como no processo de alocacao de polos via LMI.
O conceito de incertezas politopicas apresentado neste capıtulo relaciona os politopos, que

2.11 Consideracoes finais 27
sao incertezas estruturadas, que e util para o processo de otimizacao por LMIs. As incertezas
nao estruturadas faz uso da modelagem matematica das incertezas em que a adotada sao as
incertezas multiplicativas. Deste modo, e possivel fazer a analise de robustez da variacao das
incertezas em relacao a planta padrao controlada.
Os conceitos abordados sobre LMI e seus procedimentos de otimizacao serao uteis na
formulacao da estrategia de controle aplicada ao modelo do conversor no espaco de estados
medio. A analise de incertezas politopicas serao uteis na analise de simulacao do modelo
padrao adotado em malha fechada e suas incertezas obtidas atraves dos pontos de operacao
do conversor.

28
3 Teoria e Modelagem do Conversor boost
Este capitulo apresenta aspectos basicos da teoria do conversor CC-CC boost, alem de
mostrar o conceito sobre conversor boost de alto ganho de tensao com celula de comutacao
de tres estados . O capıtulo apresenta tambem o processo de reducao do conversor original ao
modelo equivalente de um boost classico. E apresentado o modelo no espaco de estados medio
do conversor boost equivalente no modo de conducao contınua. Alem disso, e abordado o
conceito de incertezas politopicas no modelo equivalente, incluindo o procedimento de extracao
das incertezas.
3.1 Topologia classica dos conversores CC-CC
Segundo Mohan (1995, 2003), Rashid (2001), Erickson (2001), as topologias de converso-
res CC-CC classicos mais conhecidos sao mostradas na Figura 3.1. Dentre estes, o conversor
em estudo e o boost da Figura 3.1(b). O conversor boost consiste no chopper CC-CC elevador
de tensao (step-up), cuja tensao de saıda e superior a tensao de entrada.
Sendo Dd o ciclo de trabalho, Vg e a tensao de entrada e Vo e a tensao de saıda, a relacaoVo
Vg, para o modo de conducao contınua, e
Vo
Vg=
11−Dd
, 0,5≤ Dd ≤ 1. (3.1)
Este conversor possui a caracterıstica de o ciclo de trabalho ideal ser superior ou igual a
0,5 e estritamente menor que 1. Isto porque Dd = 1−Vg
Voa partir de (3.1). Observa-se que
se Dd → 0 implica que Vo → Vg, mas se Dd → 1 implica que Vo → ∞, exigindo um grande
armazenamento de energia para que a relacaoVo
Vgseja realizada (RASHID, 2001).
Apesar dos conversores CC-CC classicos apresentarem baixo consumo de energia, por se
tratarem de conversores estaticos, pesquisas mais recentes propuseram topologias alternativas e
mais eficientes aos modelos classicos de choppers. Bascope e Barbi (2000) propos uma nova
famılia de conversores estaticos cuja comutacao ocorre em 3 estados. Essa proposta consiste
em alterar a composicao diodo-chave-indutor, denominada de celula de comutacao, para um
formato mais eficiente e com chaveamento com defasagem, possibilitando a reducao da ampli-

3.1 Topologia classica dos conversores CC-CC 29
(a) Buck. (b) boost. (c) Buck-boost.
(d) Cuk. (e) Zeta.
(f) sepic.
Figura 3.1: Topologias classicas de conversores CC-CC.
tude do ripple de corrente no indutor e consequentemente aumentando a taxa de rendimento do
conversor. A Figura 3.2 mostra o circuito proposto em que o ganho e dado por (3.1).
A Figura 3.3 mostra o princıpio de chaveamento do modelo proposto por Bascope e Barbi
(2000). Este tipo de chaveamento e valido principalmente para o sistema operando no modo de
conducao contınua.
Alem disso, de acordo com Bascope e Barbi (2000), Torrico-Bascope et al. (2006a, 2006b,
2006c), o conversor boost com CCTE e modificado de modo a operar com alto ganho de tensao
de acordo com a Figura 3.4. Os trabalhos de Orellana-Lafuente et al. (2010), Reis et al. (2011)
mostram a implementacao pratica do conversor da Figura 3.4. O trabalho de Orellana-Lafuente
et al. (2010) analisa o principio de funcionamento e o modo de operacao com resultados experi-
mentais, ja o trabalho de Reis et al. (2011) mostra a implementacao pratica do mesmo conversor
atraves do controle LQI, que e o controle LQR com acao integral.
Para encontrar o modelo matematico de controle, e necessario transformar o formato do
conversor proposto em uma topologia equivalente conhecida na literatura. Deste modo, e esco-
lhida a estrategia de controle com base na topologia equivalente. Para o caso do conversor boost
de alto ganho de tensao com celula de comutacao de tres estados , este e denominado de conver-
sor original. Logo o conversor equivalente e um conversor boost classico. Cita-se tambem que
os parametros do conversor original devem ser adequados ao conversor equivalente. Portanto,
deve-se garantir a conservacao de energia na transformacao da topologia original ao equivalente.

3.1 Topologia classica dos conversores CC-CC 30
Figura 3.2: Conversor boost proposto por Bascope e Barbi (2000).

3.1 Topologia classica dos conversores CC-CC 31
Figura 3.3: Princıpio de chaveamento da celula de comutacao em 3 estados proposto porBascope e Barbi (2000) e aplicado por Santero (2006) .
Figura 3.4: Conversor proposto por Torrico-Bascope et al. (2006b, 2006c), Bascope e Barbi(2000) do boost alto ganho .

3.2 Conceito do conversor original 32
3.2 Conceito do conversor original
O conversor boost de alto ganho de tensao com celula de comutacao de tres estados foi
desenvolvido por Bascope e Barbi (2000). Sua topologia caracteriza-se pelas baixas perdas
de energia durante a conversao, garantindo um alto rendimento. Conversores de alto ganho
caracterizam-se pelo alta relacao de conversao de tensao entre a entrada e a saıda. Para o
modelo do boost em estudo, e feita a elevacao de tensao de 42 volts para 400 volts. Este
conversor baseia-se nos trabalhos feitos por Orellana-Lafuente et al. (2010), Reis et al. (2011).
A Figura 3.5 mostra a configuracao deste conversor.
Figura 3.5: Topologia do conversor boost de alto ganho de tensao com celula de comutacao detres estados conforme Orellana-Lafuente et al. (2010), Reis et al. (2011).
O conversor de alto ganho da Figura 3.5 e denominado de conversor original. Ele e com-
posto pela fonte de tensao de entrada Vi, o indutor de armazenamento L, o transformador de
tres enrolamentos, as duas chaves controladas S1 e S2, os quatro diodos retificadores D1, D2,
D3 e D4, os capacitores auxiliares C1, C2 e C3, o capacitor filtro de saıda Co e sua resistencia
serie equivalente Rse ou Rco e o resistor de carga Ro que representa a carga submetida a tensao
de saıda Vo. O conversor foi estudado em regime permanente na referencia. Para controlar o
fluxo de potencia da entrada para a saıda, uma modulacao PWM com os sinais em superposicao
e usada. Portanto, a razao cıclica de cada interruptor e superior a 0,5, de acordo com Orellana-
Lafuente et al. (2010). Conforme este autor, neste conversor, durante a superposicao dos sinais
de controle, e feito o armazenamento de energia no indutor, e logo quando o interruptor e blo-
queado, a energia armazenada e enviada aos capacitores auxiliares, capacitores filtro e a carga.

3.2 Conceito do conversor original 33
A Tabela 3.1 mostra os parametros do conversor original sendo que sao 320Ω para carga plena
(500 W) e 640 Ω para meia carga (250 W).
Tabela 3.1: Parametros do conversor original adaptado de Orellana-Lafuente et al. (2010), Reiset al. (2011).
Parametros ValoresVg 42-54[V]D 0,7fs 25[kHz]Ts 40[µs]Vo 400[V]L 70[µH]
Co 680[µF]Rse 0,1[Ω]Ro 320-640[Ω]
Potencia de saıda 250-500[W ]
3.2.1 Reducao do Conversor boost original ao modelo equivalente
A necessidade da reducao a topologia equivalente se deve a complexidade do conversor
original. Esse artifıcio para facilitar a modelagem e bastante comum em literatura como nos tra-
balhos de Erickson (2001), Mohan (1995, 2003). Alem disso, Orellana-Lafuente et al. (2010),
Reis et al. (2011) aplicaram o conceito de conversor equivalente no conversor original. Para
obtencao dos valores do conversor equivalente, deve-se escolher o lado do conversor que sofrera
a adequacao ao modelo equivalente considerando a conservacao de energia. Para o conversor
equivalente da Figura 3.6, foi mantido os parametros da tensao de entrada do conversor origi-
nal. Para o conversor boost classico nao e possıvel obter o alto ganho de tensao, pois o ciclo de
trabalho torna-se proximo de 1 e as nao idealidades do conversor nao permitem atingir o valor
indicado. Por isso o valor obtido e Voeq = 70V . Para manter a conservacao de potencia nos
componentes do conversor e realizado o seguinte procedimento: A potencia no componente
original deve ser igual ao equivalente, portanto PotRo = PotRoeq, QCo = QCoeq (em que Q e a
potencia reativa no capacitor), assim por diante. Portanto
PotRo = PotRoeq→V 2
oRo
=V 2
oeq
Roeq⇒ Roeq = Ro
(Voeq
Vo
)2
=Ro
r2v
(3.2)
e
QCo = QCoeq→ ωCoV 2o = ωCoeqV 2
oeq⇒Coeq =Co
(Vo
Voeq
)2
=Cor2v . (3.3)
O mesmo conceito de potencia mostrado em (3.45) e (3.3) pode ser estendido aos demais
componentes do conversor. A Tabela 3.2 mostra os valores dos componentes para o conversor

3.3 Modelagem equivalente do conversor boost no espaco de estados 34
equivalente.
Figura 3.6: Circuito do conversor boost classico equivalente.
Tabela 3.2: Parametros do conversor equivalente (ORELLANA-LAFUENTE et al., 2010;REIS et al., 2011).
Parametros ValoresVg<eq> 42-54 [V]
Deq = 2D-1 0,4D′eq = 1−Deq 0,6
fseq 50[kHz]Tseq = T s/2 20 [µs]
Voeq 70 [V]rv =Vo/Voeq 5,714
Leq = L 70 [µH]Coeq = rv2Co 22[mF]
Rcoeq = Rco/rv2 3,063[mΩ]Roeq = Ro/rv2 9,8-19,6[Ω]
3.3 Modelagem equivalente do conversor boost no espaco
de estados
3.3.1 Modelo linearizado de conversores CC no espaco de estados
Segundo Middlebrook e Cuk (1976), o conversor boost operando no Modo de Conducao
Contınua (MCC). O MCC indica que a corrente atraves do indutor em ampla faixa de operacao
nao tende a zero.
Em seu artigo, Middlebrook e Cuk (1976) propos o metodo da modelagem no espaco de
estado medio (Space-state Averaging). Por definicao, o metodo do espaco de estados medio
combina as modelagens do chaveamento nos intervalos S1 e S2, considerando as condicoes em
regime permanente do conversor. Portanto, o modelo no espaco de estados assume as seguintes
caracterısticas para os momentos S1 e S2:
x = A1x+B1u
y =C1x+D1u
x = A2x+B2u
y =C2x+D2u. (3.4)

3.3 Modelagem equivalente do conversor boost no espaco de estados 35
Isto e feito devido ao intervalo de chaveamento do ciclo de trabalho do processo, em que Td e o
tempo do ciclo de trabalho. Considere S1 = Td , como S2 e o complementar de S1, logo S2 = 1−Td . A Figura 3.7 mostra a definicao do ciclo de trabalho, elucidando o conceito de modelagem
no espaco de estados. Portanto, sendo a variavel de entrada Vg a equacao generalizada de (3.4)
Figura 3.7: Definicao dos intervalos de chaveamento do conversor (MIDDLEBROOK; CUK,1976)
torna-se:x = Aix+BiVg,
y =Cix+DiVg.(3.5)
Sendo i = 1,2 Td = δ , em que δ e o ciclo de trabalho, e a variavel de saıda sendo a tensao
de saıda y = Vo, (3.5) pode ser modelada na seguinte forma, considerando o sistema linear e
contınuo no tempo:
x = (A1x+B1Vg)δ +(A2x+B2Vg)(1−δ ) ,
Vo = (C1x+D1Vg)δ +(C1x+D1Vg)(1−δ ) ,(3.6)
logox = (A1δ +A2 (1−δ ))x+(B1δ +B2 (1−δ ))Vg,
Vo = (C1δ +C2 (1−δ ))x+(D1δ +D2 (1−δ ))Vg.(3.7)
Fazendo a separacao dos componentes CC e CA, sao feitas as seguintes consideracoes (POMILIO,
2011):x = X +χ;
Vo =Vo + vo;
δ = Dd +d.
(3.8)
A variavel x compreende a condicao do modelo do conversor que abrange os componentes
CC e CA. Considerando o fato de que X e a componente CC em regime permanente e χ e o
componente CA. Analogamente, Vo e Dd tratam-se das componentes CC do modelo e vo, d sao

3.3 Modelagem equivalente do conversor boost no espaco de estados 36
as componentes CA do circuito. Sendo X = 0, portanto (3.6) torna-se em
χ = AX +BVg +Aχ +((A1−A2)X +(B1−B2)Vg)d,
Vo + vo =CX +DVg +Cχ +((C1−C2)X +(D1−D2)Vg)d,(3.9)
de modo que de (3.9), vem
A = A1Dd +A1 (1−Dd) , (3.10)
B = B1Dd +B1 (1−Dd) , (3.11)
C =C1Dd +C1 (1−Dd) , (3.12)
D = D1Dd +D1 (1−Dd) . (3.13)
Alem disso, os valores das variaveis de estado em regime permanente X e Vo podem ser obtidas
da seguinte forma, a partir das expressoes (3.16) a (3.19):
X = AX + BVg, X = 0→ AX + BVg = 0⇒ X = A−1BVg;
Vo =CX + DVg, D = 0→Vo =CX .(3.14)
Logo, para as variaveis de perturbacao, tem-se
χ = Aχ +((A1−A2)X +(B1−B2)Vg)d,
vo =Cχ +((C1−C2)X +(D1−D2)Vg)d,(3.15)
de modo que em (3.15)
A = A1Dd +A1 (1−Dd) , (3.16)
B = ((A1−A2)X +(B1−B2)Vg) , (3.17)
C =C1Dd +C1 (1−Dd) , (3.18)
D = ((C1−C2)X +(D1−D2)Vg) . (3.19)
As expressoes de (3.9) a (3.15) sao mostradas por Pomılio (2011), Middlebrook e Cuk
(1976), que sao importantes para se entender melhor a modelagem do conversor boost equiva-
lente. Ja de (3.16) a (3.19) definem o modelo aplicado no espaco de estados.
3.3.2 Modelo no espaco de estados do boost equivalente
A Figura 3.6 mostra o circuito equivalente do conversor boost classico. Considera-se a
modelagem do conversor no MCC, com componentes indutivo e capacitivo nao ideais conforme
modelado por Middlebrook e Cuk (1976) para o modelo em regime permanente.

3.3 Modelagem equivalente do conversor boost no espaco de estados 37
Teorema 3.1 (MIDDLEBROOK; CUK, 1976). As equacoes do modelo no espaco de estados
medio em regime permanente do conversor boost equivalente para o intervalo de chaveamento
S1 e S2 sao dadas por:
• Estado S1:
A1 =
−RLeqLeq
0
0 − 1(Roeq+Rceq)Ceq
; B1 =
1Leq
0
;
C1 =[
0 RoeqRoeq+Rceq
]; D1 = 0;
(3.20)
• Estado S2:
A2 =
RLeq+Rceq||RoeqLeq
− Roeq
Leq(Roeq+Rceq)
− Roeq
Coeq(Roeq+Rceq)− 1
Coeq(Roeq+Rceq)
; B2 =
1Leq
0
;
C2 =[
Roeq||RceqRoeq
Roeq+Rceq
]; D2 = 0;
(3.21)
Prova 3.1.1 A Figura 3.8 ilustra o conversor boost equivalente nos intervalos de chaveamento
S1 e S2.
(a) Boost no estado de chaveamento S1.
(b) Boost no estado de chaveamento S2.
Figura 3.8: Conversor boost nos estagios de chaveamento.
Com base na Figura 3.8(a), tem-se as seguintes equacoes de acordo com as leis de Kirchoff
das tensoes e das correntes
Vgeq(t) = RLeqiL(t)+LeqdiL(t)
dt(3.22)
e
Vcoeq(t)+(Rcoeq +Roeq
)Coeq
dVcoeq(t)dt
= 0. (3.23)

3.3 Modelagem equivalente do conversor boost no espaco de estados 38
Organizando as expressoes (3.22) e (3.23) tem-se
diLdt
=−RLeq
LeqiL(t)+
1Leq
Vgeq, (3.24)
dVcoeq
dt=− 1(
Rcoeq +Roeq)
CoeqVcoeq(t). (3.25)
Alem disso
Voeq =Roeq(
Rcoeq +Roeq)
CoeqVcoeq(t). (3.26)
Ja com base na Figura 3.8(b), tem-se as seguintes equacoes de acordo com as leis de
Kirchoff das tensoes e das correntes
Voeq(t) = Rcoeqic(t)+Vcoeq(t), (3.27)
Vgeq = RLeqiL(t)+LeqdiL(t)
dt+Rcoeqic(t)+Vcoeq(t), (3.28)
e
iL(t) =CoeqdVcoeq(t)
dt+
1Roeq
Voeq(t). (3.29)
Substituindo (3.27) em (3.29), tem-se
iL(t) =(
Roeq +Rcoeq
Roeq
)Coeq
dVcoeq(t)dt
+1
RoeqVcoeq(t). (3.30)
Reorganizando (3.30) e (3.28), segue-se que
dVcoeq(t)dt
=Roeq(
Roeq +Rcoeq)
CoeqiL(t)−
1(Roeq +Rcoeq
)Coeq
Vcoeq(t), (3.31)
Vgeq = RLeqiL(t)+LeqdiL(t)
dt+RcoeqCoeq
dVcoeq(t)dt
+Vcoeq(t). (3.32)
Substituindo (3.31) em (3.27) e em (3.32), tem-se entao
Vgeq = RLeqiL(t)+LeqdiL(t)
dt+
(Rcoeq||RoeqiL(t)−
Rcoeq(Roeq +Rcoeq
)Vcoeq(t)
)+Vcoeq(t), (3.33)
Voeq(t) = Rcoeq
(Roeq(
Roeq +Rcoeq) iL(t)−
1(Roeq +Rcoeq
)Vcoeq(t)
)+Vcoeq(t). (3.34)
Reorganizando (3.33) e (3.34), segue-se que
diL(t)dt
= −RLeq +Roeq||Rcoeq
LeqiL(t)−
Roeq
Leq(Roeq +Rcoeq
)Vcoeq(t)+1
LeqVgeq, (3.35)
Voeq(t) = Roeq||RcoeqiL(t)+Rcoeq(
Roeq +Rcoeq)Vcoeq.(t) (3.36)

3.4 Analise das incertezas no conversor 39
Portanto, as equacoes do modelo do conversor boost equivalente para o intervalo de chave-
amento S1, basta organizar (3.24), (3.25) (3.26), no modelo no espaco de estado considerando
x(t) =
[iL(t)
Vcoeq(t)
], (3.37)
e expresso em (3.20). Ja para S2, basta organizar (3.31), (3.35) e (3.36) de forma analoga
como em (3.20), que e (3.21).
Corolario 3.1.1 Do Teorema 3.1. Aplicando-se (3.20), (3.21) em (3.14), tem-se entao
X =VgeqR′
[1(
1−Ddeq)
Roeq
], Voeq = Y =
Vg(1−Ddeq
)Roeq
R′, (3.38)
em que R′ ∆=(1−Ddeq
)2 Roeq +RLeq +Ddeq(1−Ddeq
)(Rceq||Roeq
)e Voeq e a tensao equiva-
lente desejada em 70V , que corresponde a Vo = 400V.
Corolario 3.1.2 Do Teorema 3.1. Aplicando-se (3.20), (3.21) em (3.15), e obtida a seguinte
equacao de estados:χ = Aχ +Bd,
vo =Cχ +Dd,(3.39)
em que de (3.16) a (3.19), ve-se que
A =
−RLeq+(1−Ddeq)(Rcoeq||Roeq)Leq
− (1−Ddeq)Roeq
Leq(Rcoeq+Roeq)(1−Ddeq)Roeq
Coeq(Rcoeq+Roeq)− 1
Coeq(Rcoeq+Roeq)
, (3.40)
B =
RcoeqLeq
(1−Ddeq)Roeq+Rcoeq
(Rcoeq+Roeq)
− Roeq
Coeq(Rcoeq+Roeq)
, (3.41)
C =[ (
1−Ddeq)(
Rcoeq||Roeq) Roeq
(Rcoeq+Roeq)
], (3.42)
D =−VgRcoeq||Roeq
R′. (3.43)
3.4 Analise das incertezas no conversor
As especificacoes do conversor original e equivalente possuem tensoes de entrada e carga
variaveis. Para as condicoes de projeto, sao consideradas incertezas no processo, pois e ne-
cessario que seja projetada uma estrategia de controle que satisfaca tais condicoes de operacao

3.4 Analise das incertezas no conversor 40
do conversor. Para o projeto do controlador, o controle do conversor deve garantir a estabilidade
e a robustez do sistema. Alem disso, deve-se considerar que os parametros variantes do con-
versor obedecem uma variacao politopica. Observa-se que Vg ∈ [42,54]V e Pot ∈ [250,500]W .
Portanto, o ciclo de trabalho e a resistencia de carga sao variantes de acordo com Vg e Pot, isto
implica que o modelo no espaco de estados e do tipo x = A(p)x+B(p)u e y =C(p)x+D(p)u,
em que p = f (Vg,Pot), que e o conjunto de pontos de operacao do conversor tanto o original
como o equivalente, pois Vg = Vgeq conforme Tabela 3.2. Logo, generalizando o conceito de
incertezas politopicas Roeq = f (Pot) e Dd = f (Vgeq), isto porque
Roeq = f (Pot) =V 2
oeq
Pot, Pot ∈ [250,500] (3.44)
e
Dd = f (Vgeq) = 1−Vgeq
Voeq,Vgeq ∈ [42,54]. (3.45)
Deste modo, o modelo no espaco de estados aplicado ao boost constitui-se de um sistema do
tipo linear com parametros variaveis (LPV Systems). Como ha 2 parametros variantes, o numero
de dimensoes politopicas e n = 2, logo o total de politopos p que define o modelo no espaco
de estados do conversor e de p = 2n→ p = 22 = 4, p = 4 politopos. Portanto, a composicao
(3.20), (3.21) em (3.15) e um sistema LPV incerto. No entanto, esta faixa de varicao citada
pode ser tratada como incerteza inerente ao projeto de controle do conversor. Alem disso, estes
conceitos de incertezas tambem foi publicada por Olalla et al. (2009). Metodos de otimizacao
com parametros variantes aplicados ao conversor e mostrado tambem por Gezgin et al. (1997).
Para o caso do conversor boost equivalente, as incertezas presentes em projeto sao adaptadas de
Orellana-Lafuente et al. (2010) conforme mostrado na Tabela 3.3.
Tabela 3.3: Incertezas de Projeto do conversor conforme e Tabela 3.1 condicoes fısicas deaplicacao.
Incertezas de ProjetoTensao de Entrada (Vg) 42-54VVariacao de Carga(W) 250-500W
Freq. de Corte (Hz) 19HzFreq. Max (kHz) 6,25kHz
A frequencia maxima de projeto do conversor e equivalente a 25% da frequencia nominal
de chaveamento de modo a evitar a superposicao de sinal entre a maior frequencia de canto e
o tempo de amostragem decorrente do chaveamento do conversor. Do ponto de vista das incer-
tezas politopicas, tem-se que a faixa de incertezas de tensao de entrada e de potencia conforme
Palhares e Goncalves (2008), Boyd et al. (1994), Gahinet et al. (1995). A Figura 3.9 mostra a
regiao de incerteza politopica de Potencia versus tensao de entrada (Vg).

3.5 Consideracoes finais 41
Figura 3.9: Regiao de incertezas politopicas Pot × Vg.
Analisando-se a Tabela 3.3,observa-se que Vgeq ∈ [42,54] e Pot ∈ [250,500]. Como p = 4,
existem entao 4 funcoes de transferencia. Trabalhos como de Orellana-Lafuente et al. (2010),
Reis et al. (2011), fazem uma analise do conversor considerando uma tensao de entrada desejada
e em plena carga. Para analise do conversor equivalente, serao utilizado os mesmos princıpios
para escolha de G(s), neste caso Vgeq = 42V e em plena carga(500W ). Portanto pG = f (42,500),
p1 = f (54,500), p2 = f (42,250) e p3 = f (54,250). Sendo pG ⇒ G(s), p1 ⇒ G1(s), p2 ⇒G2(s) e p3⇒ G3(s), vem que ∆m1(s), ∆m2(s) e ∆m3(s) pode ser obtido de (2.61). Utilizando-se
o software MATLAB , observa-se que os resultados das incertezas sao no formato no espaco de
estados. Portanto, para obtencao de G(s), utiliza-se (2.68), para incertezas do tipo ∆m de (2.61),
usa-se (2.69) para cada incerteza. De (2.69), e escolhida a incerteza de pior caso e comparada
com 1/T (s) na frequencia, o sistema e estavelmente robusto obedecendo (2.66).
3.5 Consideracoes finais
Este capıtulo mostra os conceitos basicos sobre conversores CC-CC, alem de abordar a
transformacao do conversor boost de alto ganho de tensao com celula de comutacao de tres
estados no conversor boost equivalente. O modelo matematico abordado e modelo no espaco
de estados medio no modo de conducao contınua. O capıtulo mostra a aplicacao de incertezas
politopicas na obtencao das incertezas e que e considerada condicao de pior caso . A teoria
abordada neste capıtulo e necessario para obtencao do modelo numerico para a estrategia de
controle.

42
4 Estrategias de Controle Aplicado aoConversor Boost
Neste capıtulo sao aplicados os conceitos de estabilidade de Lyapunov, incertezas po-
litopicas, controle LQR otimizado via LMIs e regioes de D-estabilidade na formulacao das
estrategias de controle D-Alocacao de polos e D-LQI robustos. Apresenta-se ainda o con-
ceito de servomecanismo com acao integral, que e a topologia escolhida para as estrategias de
controle utilizadas.
4.1 Servomecanismo com acao integral
A Figura 4.1 mostra o diagrama de blocos da topologia de controle no espaco de estados do
servomecanismo com acao integral. Segundo Ogata (2003), Dorf e Bishop (1998), servomeca-
nismos ou modelo interno de controle sao topologias de controle empregadas com o objetivo de
manter o erro de seguimento de referencia ou erro de rastreio nulo. Existem diversos modelos
de seguimento de referencia. Primeiramente, deve-se escolher para qual modelo de referencia
desejado para o sistema controlado. O diagrama de blocos mostrado na Figura 4.1 e indicado
principalmente para seguimentos de referencia que varie em degrau. Faz-se necessario que o
erro de referencia deste tipo de entrada seja nulo em regime permanente.
Figura 4.1: Servomecanismo de acao integral.
Modelos com realimentacao de estados tradicional sao mais indicados para sistemas com

4.1 Servomecanismo com acao integral 43
referencia nula (TROFINO et al., 2003). Para casos de referencia constante, faz-se uso dos
sistemas com rastreadores. Para o caso de realimentacao de estados, o rastreamento pode ser
feito via correcao por erro estatico ou por servomecanismos com integradores, mais conhecido
como modelo interno de controle (DORF; BISHOP, 1998; CHEN, 1999). No rastreamento
com correcao do erro estatico, adiciona-se uma matriz de ganhos obtida pela inversao da matriz
de transferencia de malha fechada resultado do teorema do valor final. No entanto, de acordo
com Trofino et al. (2003), devido a sua simplicidade, esse tipo de topologia nao garante erro de
regime permanente nulo para perturbacoes nos atuadores (no sinal de controle) e nos medidores,
alem de tambem nao ser robusto em relacao a mudancas no ponto de operacao do sistema fısico.
Para o caso do controle do conversor, e admitido que a referencia desejada seja a tensao de
saıda regulada num valor constante e diferente de zero. Portanto, trata-se de um degrau cujo
erro de referencia necessita ser nulo em regime permanente. Os servomecanismos apresentam
a vantagem de garantir, com eficiencia, a resposta desejada para modelos no espaco de estados.
No entanto, deve estar atento ao esforco de controle, pois estrategias de controle com uso de
integradores costumam sacrificar a energia de controle com o objetivo de garantir a resposta
desejada.
Portanto, com base na Figura 4.1, faz-se uso da expressao geral no espaco de estados
x = Ax+Bu, (4.1)
y =Cx+Du (4.2)
e do erro de integracao
ξ = r− y. (4.3)
Sao entao obtidas as seguintes matrizes no modelo expandido com base nas deducoes de Ogata
(2003), Dorf e Bishop (1998):
A =
[A 0
−C 0
]; (4.4)
B =
[B
D
]. (4.5)
As expressoes (4.4) e (4.5) sao necessarias para na busca do controlador de realimentacao
de estados expandido, analisando de acordo com a Figura 4.1 e dado por
u =−Kx+Kiξ =−[
K −Ki
][ x
ξ
]= Kx. (4.6)

4.1 Servomecanismo com acao integral 44
Substituindo-se (4.6) em (4.2), tem-se
x = (A−BK)x+BKiξ , (4.7)
y = (C−DK)x+DKiξ . (4.8)
Substituindo-se (4.8) em (4.3),segue-se que
ξ =−(C−DK)x−DKiξ + r. (4.9)
Organizando (4.7),(4.8) e (4.9) no formato no espaco de estados em malha fechada, tem-se
˙x =
[A−BK BKi
−(C−DK) DKi
]x+
[0
I
]r, (4.10)
y =[(C−DK) −DKi
]x. (4.11)
As expressoes (4.10) e (4.11) definem a resposta do servomecanismo de acao integral em
malha fechada. No entanto, para o conversor boost equivalente, e necessario adequar (4.10) e
(4.11) para tensao de PWM, que e VT = 5V . Adaptando (4.6), tem-se
u =1
VTKx. (4.12)
Para analisar o desempenho do ciclo de trabalho do conversor no controle basta multiplicar Voeq
em (4.12), de modo que
ud =Voeq
VTKx. (4.13)
Portanto, atraves de (4.10) e (4.11), e usando o conceito de realimentacao de estados de (4.12),
chega-se a˙x = Am f x+Bm f r, (4.14)
y =Cm f x+Dm f r, (4.15)
em que
Am f =
A−B KVT
B KiVT
−(
C−D KVT
)D K
VT
; (4.16)
Bm f =
[0
I
]; (4.17)
Cm f =[
C−D KVT
D KiVT
]; (4.18)
Dm f = 0. (4.19)

4.2 Projeto do controlador robusto otimizado por LMI via alocacao de polos - D-Alocacao de polos 45
4.2 Projeto do controlador robusto otimizado por LMI via
alocacao de polos - D-Alocacao de polos
O projeto de controle por alocacao de polos parte do princıpio de que e necessario encontrar
um ganho de realimentacao de estados que garanta a estabilidade e eficiencia do processo dentro
dos criterios desejados. A Figura 4.2 mostra a regiao de alocacao de polos desejada para o
projeto de controle, em que h1 = 19Hz, h2 = 6,25kHz conforme a Tabela 3.3. O raio com
centro na origem e r = 7,5kHz, que e convencionado em 30% da frequencia de chaveamento
do conversor. A escolha do valor do raio deve-se a necessidade de limitar a regiao desejada de
alocacao para evitar a convergencia de valores incompatıveis com o modelo fısico em estudo. A
parte hachurada da Figura 4.2 corresponde a regiao LMI em que os autovalores devem convergir
no processo de otimizacao.
Figura 4.2: Regiao desejavel para o projeto de controle.
Utilizando-se o conceito de matrizes expandidas em (4.4), (4.5), alem das expressoes (2.56),
(2.57) e (2.58) do Capıtulo 2, tem-se entao as seguintes LMIs para obtencao do ganho via D-
Alocacao de polos:
P > 0,
−2h1P+(AP− BY
)+(AP− BY
)′< 0,
2h2P−(
AP− BY +(AP− BY
)′)< 0,[
−rP qP+(AP− BY
)qP+
(AP− BY
)′ −rP
]< 0,
(4.20)
em que o disco circular esta centrado na origem, a matriz P e simetrica positiva, Y e uma matriz
retangular e K = Y P−1.

4.3 Projeto do controlador robusto otimizado via LQI com D-estabilidade - D-LQI 46
Entretanto (4.20) nao e robusta, pois e suficiente apenas para um ponto de operacao do
conversor. Para a condicao em (4.20) ser robusta, deve-se considerar as condicoes de incertezas
politopicas da Secao 3.4. Portanto, usando-se os parametros de incertezas Secao 3.4, (4.20)
tem-se que
P > 0,
−2h1P+(AiP− BiY
)+(AiP− BiY
)′< 0,
2h2P−(
AiP− BiY +(AiP− BiY
)′)< 0,[
−rP qP+(AiP− BiY
)qP+
(AiP− BiY
)′ −rP
]< 0
(4.21)
isso para i = 1→ p, p = 4 e K = Y P−1.
4.3 Projeto do controlador robusto otimizado via LQI com
D-estabilidade - D-LQI
Existem algumas semelhancas entre a otimizacao via LQR D-estabilidade e a otimizacao
por alocacao de polos via LMI. Com base no Capıtulo 2, ambos sao solucionados via LMI,
porem o controle via LQR utiliza-se da minimizacao sistematica do ındice de desempenho
adaptado para desigualdades matriciais lineares conforme (2.36), ao qual foi apresentado por
Ghaoui et al. (1992) e aplicado por Ko et al. (2006), Olalla et al. (2009). Porem o processo de
D-estabilidade permite ao LQR a capacidade de aplicar um modelo robusto e otimizado con-
siderando as limitacoes fısicas e de projeto de controlador de acordo com Capıtulo 3, conside-
rando seus efeitos de regime em malha fechada, que nesse caso, sao as limitacoes de frequencias
de corte.
A Figura 4.3 mostra a aplicacao LQR otimizado via LMI com D-estabilidade. Assim como
na Figura 4.2, h1 e h2 sao limites de frequencias de corte aplicadas ao conversor acrescentadas
as regioes LQR que podem ser minimizadas pelo seu ındice de desempenho. A regiao hachu-
rada corresponde a limitacao das barreiras h1 e h2 e o proprio processo de otimizacao LQR.
Portanto, os limites da regiao LQR sao definidos pela sua propria definicao teorica, diferente
da Figura 4.2, que requer o uso de definicoes geometricas para que a regiao desejada seja sa-
tisfeita. Conforme a Figura 4.3, observa-se que a Regiao JLQR compreende a regiao possivel
de autovalores que podem ser obtidos pelo processo de otimizacao LQR via LMIs. Esta regiao
varia de acordo com as variacoes dos parametros Q e R da definicao do ındice de desempenho.
Deste modo h1 e h2 visam restringir a Regiao JLQR para valores adequados as necessidade de
projeto.
Portanto, com base na Subsecao 2.9.1 e nas expressoes (4.4) e (4.5), a solucao do ganho

4.4 Consideracoes finais 47
Figura 4.3: Regiao desejada aplicada ao LQR com D-estabilidade.
robusto K e dada por
minP,Y,Z
tr(QP)+ tr(Z),
−2h1P+(AiP− BiY
)+(AiP− BiY
)′< 0,
2h2P−(
AiP− BiY +(AiP− BiY
)′)< 0,
su jeitoa
[Z R1/2Y
Y ′R1/2 P
]> 0, P > 0,
(4.22)
isso para i = 1→ p, p = 4 e K = Y P−1. Sendo que a ordem da matriz de de ponderacao Q e de
ordem igual a matriz A e a a ordem da matriz R e igual ao numero de colunas da matriz B.
4.4 Consideracoes finais
Neste capıtulo, os conhecimentos sobre LMI vistos no Capıtulo 2 foram aplicados na
definicao da estrategia de controle no conversor equivalente, juntamente com o conceito de
servomecanismo com acao integral. Observa-se que o processo de otimizacao com restricoes
LMIs permite que sejam obtidas solucoes tanto para a D-Alocacao de polos como para D-
LQI. Alem disso o processo de restricoes permite que o procedimento de otimizacao seja feito
via incertezas politopicas, visto em (4.21) e (4.22). Tais procedimentos sao responsaveis para
formulacao do ganho de realimentacao de estados expandido no capıtulo seguinte.

48
5 Analise e Resultados de Simulacao doConversor
Este capitulo mostra os resultados de simulacao do conversor original com base no modelo
numerico do conversor equivalente, alem das matrizes no espaco de estados em outros pontos
de operacao, utilizados para obter a funcao de transferencia do modelo de incertezas. Sao
mostrados tambem as analises das curvas no tempo via PSIM as curvas de incertezas juntamente
com a estabilidade robusta na frequencia utilizando as estrategias de controle adotadas.
5.1 Modelo numerico em malha aberta do conversor boost
equivalente
De acordo com os parametros da Tabela 3.2 e do modelo no espaco de estado do Teorema
3.1. Considerando Vieq = 42V e em plena carga, pois pG = f (42,500)→ G(s), sendo pG uma
representacao da funcao de transferencia politopica vista na Secao 3.4 , as matrizes numericas
sao:
• Para o instante de chaveamento S1:
A1 =
[0 0
0 −4,6368
]; B1 = 104×
[1,4286
0
];
C1 =[
0 0,9997]
; D1 = 0.
(5.1)
• Para o instante de chaveamento S2:
A2 = 104×
[−0,0044 −1,4281
0,0045 −0,0005
]; B2 = 104×
[1,4286
0
];
C2 =[
0,0031 0,9997]
; D2 = 0.
(5.2)
Alem disso, obtendo-se A de (3.16) e B de (3.11), de (3.14), vem
X =
[11,9023
69,9854
]. (5.3)

5.2 Simulacao no PSIM 49
Portanto, as matrizes do modelo no espaco de estados em malha aberta, conforme (3.16) a
(3.19), sao
A = 103×
[−0,0262 −8,5688
0,0273 −0,0046
]; B = 106×
[1
−0,0005
];
C =[
0,0018 0,9997]
;D =[−0,0364] .
(5.4)
Em que (5.4) refere-se ao modelo numerico para pG = f (42,500). De modo analogo, sao
obtidas as seguintes matrizes dos pontos de operacao do modelo politopico do conversor
• para p1 = f (54,500)→ G1(s) =Cp1 (sI−Ap1)−1 Bp1 +Dp1:
Ap1 =
[−33,74 −1,102×104
35,05 −4,637
]; Bp1 =
[1×106
−420,7
];
Cp1 =[
0,002362 0,9997]
; Dp1 =−0,02835;
(5.5)
• para p2 = f (42,250)→ G2(s) =Cp2 (sI−Ap2)−1 Bp2 +Dp2:
Ap2 =
[−26,25 −8570
27,27 −2,319
]; Bp2 =
[1×106
−270,5
];
Cp2 =[
0,001838 0,9998]
; Dp2 =−0,01823;
(5.6)
• para p3 = f (54,250)→ G3(s) =Cp3 (sI−Ap3)−1 Bp3 +Dp3 :
Ap3 =
[−33,75 −1,102×104
35,06 −2,319
]; Bp3 =
[1×106
−210,4
];
Cp3 =[
0,002363 0,9998]
; Dp3 =−0,01418.
(5.7)
Observa-se que (5.5), (5.6) e (5.7) referem-se respectivamente aos modelos dos demais pontos
de operacao do conversor.
5.2 Simulacao no PSIM
Para os procedimentos de simulacao, foram levados em consideracao as condicoes de tensao
de entrada Vg e de carga para o conversor boost original. A tensao de entrada Vg varia entre
42−54V na faixa de intervalo de 50ms, a variacao de carga oscila entre 50−100% tambem no
intervalo de comutacao de 50ms. A Figura 5.1 mostra como as curvas de tensao de entrada e
de carga sao aplicadas ao conversor. E convencionado que o valor 1 equivale a plena carga e o
valor 0 equivale a meia carga.

5.2 Simulacao no PSIM 50
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.5
1
Tempo (s)
Equ
ival
enci
a de
car
ga Variação de Carga
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.240
45
50
55
Tempo (s)
Ten
são
em v
olts
Variação de Vi
Figura 5.1: Variacao da carga e da tensao de entrada no conversor.
A Figura 5.2 mostra a simulacao do controle do conversor original no software PSIM.
Nessa simulacao, o emulador PWM mostra a configuracao de amplificadores operacionais. A
configuracao do conversor boost de alto ganho de tensao com celula de comutacao de tres
estados , alem de nao alterar os ganhos do controlador apos o processo de otimizacao. Para
testar o desempenho do controle robusto, as curvas da Figura 5.1 sao consideradas perturbacoes
tanto na tensao de entrada como nas variacoes da carga. Nesse caso, para adequar os ganhos do
controlador a realidade do circuito, o ganho de acao integral Ki = −K3×Vgeq, em que Vgeq =
70V que e a relacao que precisa ser adequada do modelo equivalente a topologia original. O
simbolo khat(2) = K2×0.175 no PSIM, enquanto que khat(1) = K1.

5.2 Simulacao no PSIM 51
Figu
ra5.
2:M
odel
odo
conv
erso
rori
gina
lem
mal
hafe
chad
ano
PSIM
.

5.3 Resposta do sistema em malha fechada do controle robusto 52
5.3 Resposta do sistema em malha fechada do controle ro-
busto
5.3.1 Resultados numericos em malha fechada do controle por D-Alocacaode polos
Utilizando-se as LMIs descritas em (4.21) com as matrizes expandidas de (4.4), (4.5) e com
base nos conceitos de incertezas politopicas do conversor de acordo com a Secao 3.4, tem-se o
seguinte vetor de ganhos,
K =[
K −Ki
]=[
0,0169 0,1626 −17,2421]. (5.8)
Atraves de (5.8), o sistema de realimentacao em malha fechada, conforme (4.16) a (4.19) e (5.4)
e entao
Am f a =
−3408 −4,11×104 3,448×104
29,09 12,95 −1865
−0,00196 −1,001 0,1257
;Bm f a =
0
0
1
;
Cm f a =[
0,00196 1,001 −0,1257]
; Dm f a = 0.
(5.9)
Em que m f a e o subındice do modelo em malha fechada para alocacao de polos robusta.
5.3.2 Resultados numericos em malha fechada do controle por D-LQI
De acordo com as LMIs descritas em (4.22) com as matrizes expandidas de (4.4) e (4.5),
com os conceitos de incertezas politopicas da Secao 3.4, tem-se o seguinte vetor de ganhos,
K =[
K −Ki
]=[
0,0196 0,1865 −19,1211]. (5.10)
Atraves de (5.10), o sistema de realimentacao em malha fechada, conforme (4.16) a (4.19) e
(5.4) e entao
Am f lqi =
−3948 −4,587×104 3,824×104
29,39 15,54 −2068
−0,00198 −1,001 0,1394
;Bm f lqi =
0
0
1
;
Cm f lqi =[
0,00198 1,001 −0,1394]
; Dm f lqi = 0.
(5.11)
Em que m f lqi e o subındice do modelo em malha fechada para o LQI robusto.

5.3 Resposta do sistema em malha fechada do controle robusto 53
5.3.3 Analise das curvas no regime transitorio e permanente
O tempo de simulacao executado no PSIM foi de 200ms com taxa de amostragem de 2µs.
De acordo com as Figuras 5.3-5.5, observa-se que os resultados sao muito semelhantes nos dois
controles. As diferencas entre os dois controles sao bem pequenas, considerando-se as mesmas
condicoes de projeto.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
50
100
150
200
250
300
350
400
450
Tempo (s)
Ten
são
em (
V)
Tensão de saída entre controles robustos no PSIM
D−Alocação
D−LQI
Figura 5.3: Tensao Vo dos controles D-alocacao de polos e D-LQI para o conversor boostoriginal.
Na Figura 5.3, observa-se que ambos os controles garantem o tempo de estabilizacao em
aproximadamente 33ms. Alem disso, o maior valor em regime permanente, diante das variacoes
de carga e Vg, e de 407V , ja o menor valor nas mesmas condicoes e de 391V . Portanto a taxa
de oscilacao diante das variacoes impostas na Figura 5.1 e de 4% para ambas estrategias de
controle aplicadas ao conversor original.
Na Figura 5.4, a corrente do indutor apresenta comportamentos muitos semelhantes. Com
base na variacao de carga e Vg da Figura 5.1, ve-se que nas mudancas de setpoint de carga,
existe variacao de corrente, que esta em torno de 11,88A em plena carga e entre 4,5A e 5,9A
em meia carga. Portanto, em meia carga existe uma maior oscilacao na corrente do indutor que
em plena carga, mas garante um valor medio de 5,2A. Esse valor reduzido se deve ao fato das
perdas em baixas potencias sao mais representativas que em altas potencias, alem do ripple de
corrente que e considerado de cerca de 10% para o projeto do indutor.
Na Figura 5.5, e mostrada a tensao de referencia de PWM, que e a tensao de controle.
Observa-se que a tensao de PWM e maior nos momentos de maior incidencia de carga do

5.3 Resposta do sistema em malha fechada do controle robusto 54
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
10
20
30
40
50
60
70
80
Tempo (s)
Cor
rent
e em
(A
)
Corrente no indutor entre controles robustos no PSIM
D−AlocaçãoD−LQI
Figura 5.4: Corrente no indutor tanto pelo controle por D-alocacao de polos como D-LQI parao conversor boost original.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.20
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
Tempo (s)
Ten
são
de c
ontr
ole
em (
V)
Tensão de Controle dos controles robustos no PSIM
D−Alocação
D−LQI
Figura 5.5: Tensao de referencia PWM tanto pelo controle por D-alocacao de polos comoD-LQI para o conversor boost original.

5.3 Resposta do sistema em malha fechada do controle robusto 55
conversor, com base na 5.1. Portanto, a carga influencia mais na tensao de PWM do que a
tensao de entrada Vg.
5.3.4 Analise das curvas em regime permanente
Para a analise de simulacao no PSIM para as duas estrategias de controle e feita o procedi-
mento de aumento e reducao de carga em regime permanente e no espaco de tempo de 200ms.
Sao analisados a resposta da tensao de saıda em 400V , o comportamento dinamico da corrente
de saıda e da corrente no indutor.
Analise de simulacao para D-Alocacao de polos
Na Figura 5.6 e mostrada o comportamento em regime permanente da tensao de saıda Vo e
a corrente de saıda Io. Observa-se que o comportamento da corrente acompanhou o processo de
subida e descida de carga sem oscilacoes que comprometessem o comportamento do circuito.
0.25 0.3 0.35 0.4 0.45395
400
405
Tempo (s)
Ten
são
em v
olts
V0 controlado por Alocação Robusta no PSIM, V
g=42V
0.25 0.3 0.35 0.4 0.450
0.5
1
1.5
Tempo (s)
Cor
rent
e em
(A
)
Io controlado por Alocação Robusta no PSIM, V
g=42V
Figura 5.6: Tensao e corrente de saıda para o controlador robusto D-Alocacao de polos paraVg = 42V .
Na Figura 5.7 e feita uma visualizacao detalhada da tensao de saıda juntamente com a forma
de onda da corrente no indutor para Vg = 42V . Observa-se que, no momento da mudanca de
carga, existe um ligeira oscilacao em Vo em ±3V aproximadamente. Valor cuja variacao de
tensao pico a pico e de cerca 6V que chega a ser aproximadamente 1,5% da tensao de saıda do
processo.

5.3 Resposta do sistema em malha fechada do controle robusto 56
0.25 0.3 0.35 0.4 0.45395
400
405
Tempo (s)
Ten
são
em v
olts
V0 controlado por Alocação Robusta no PSIM, V
g=42V
0.25 0.3 0.35 0.4 0.450
5
10
15
Tempo (s)
Cor
rent
e em
(A
)
IL controlado por Alocação Robusta no PSIM, V
g=42V
Figura 5.7: Tensao de saıda e corrente no indutor para o controlador robusto D-Alocacao depolos para Vg = 42V .
As curvas de Vo e Io na Figura 5.8 sao bastante semelhantes as curvas da Figura 5.6. Isto
porque a estrategia de controle deve garantir a estabilidade e a resposta tanto para Vg = 42V
como para Vg = 54V .
0.25 0.3 0.35 0.4 0.45395
400
405
Tempo (s)
Ten
são
em v
olts
V0 controlado por Alocação Robusta no PSIM, V
g=54V
0.25 0.3 0.35 0.4 0.450
0.5
1
1.5
Tempo (s)
Cor
rent
e em
(A
)
Io controlado por Alocação Robusta no PSIM, V
g=54V
Figura 5.8: Tensao de saıda e corrente de saıda no conversor para o controlador robustoD-Alocacao de polos Vg = 54V .
A Figura 5.9 faz a mesma analise feita na 5.7. Embora a a corrente no indutor seja ligeira-

5.3 Resposta do sistema em malha fechada do controle robusto 57
mente menor, ve-se que, na mudanca de carga, a curva de IL para Vg = 54V e mais ruidosa que
para Vg = 42V . Mesmo existindo tal situacao, o efeito do ruıdo via simulacao nao comprometeu
a estabilidade nem a resposta do sistema no tempo.
0.25 0.3 0.35 0.4 0.45395
400
405
Tempo (s)
Ten
são
em v
olts
V0 controlado por Alocação Robusta no PSIM, V
g=54V
0.25 0.3 0.35 0.4 0.450
5
10
15
Tempo (s)
Cor
rent
e em
(A
)
IL controlado por Alocação Robusta no PSIM, V
g=54V
Figura 5.9: Tensao de saıda e corrente no indutor no conversor para o controlador robustoD-Alocacao de polos Vg = 54V .
Analise de simulacao para D-LQI
Na Figura 5.10 e mostrada o comportamento em regime permanente da tensao de saıda Vo e
a corrente de saıda Io. Observa-se que o comportamento da corrente acompanhou o processo de
subida e descida de carga sem oscilacoes que comprometessem o comportamento do circuito,
isso utilizando o controle por D-LQI.
Na Figura 5.11 e feita uma visualizacao detalhada da tensao de saıda juntamente com a
forma de onda da corrente no indutor para Vg = 42V . Observa-se que, no momento da mudanca
de carga, existe um ligeira oscilacao em Vo em ±3V aproximadamente, porem com maior
oscilacao da corrente IL e de Vo. Mesmo com uma presenca maior de oscilacao, a variacao
de tensao pico a pico e de cerca 6V que chega a ser aproximadamente 1,5% da tensao de saıda
do processo.
A Figura 5.12 mostra o comportamento de Vo e Io para Vg = 54V com o controle D-LQI
robusto. Observa-se que o resultado mantem-se dentro das condicoes de estabilidade desejada
nos momentos de aumento e reducao de carga.
Observando a Figura 5.13 com uma visualizacao detalhada da tensao de saıda juntamente
com a forma de onda da corrente no indutor para Vg = 54V . Observa-se que, no momento da

5.3 Resposta do sistema em malha fechada do controle robusto 58
0.25 0.3 0.35 0.4 0.45395
400
405
Tempo (s)
Ten
são
em v
olts
V0 controlado por Alocação Robusta no PSIM, V
g=42V
0.25 0.3 0.35 0.4 0.450
0.5
1
1.5
Tempo (s)
Cor
rent
e em
(A
)
Io controlado por Alocação Robusta no PSIM, V
g=42V
Figura 5.10: Tensao de saıda e corrente de saıda no conversor para o controlador robusto viaD-LQI Vg = 42V .
0.25 0.3 0.35 0.4 0.45395
400
405
Tempo (s)
Ten
são
em v
olts
V0 controlado por LQI Robusto no PSIM, V
g=42V
0.25 0.3 0.35 0.4 0.450
5
10
15
Tempo (s)
Cor
rent
e em
(A
)
IL controlado por LQI Robusto no PSIM, V
g=42V
Figura 5.11: Tensao de saıda e corrente no indutor no conversor para o controlador robusto viaD-LQI Vg = 42V .

5.3 Resposta do sistema em malha fechada do controle robusto 59
0.25 0.3 0.35 0.4 0.45395
400
405
Tempo (s)
Ten
são
(V)
V0 controlado por LQI Robusto no PSIM, V
g=54V
0.25 0.3 0.35 0.4 0.450
0.5
1
1.5
Tempo (s)
Cor
rent
e em
(A
)
Io controlado por LQI Robusto no PSIM, V
g=54V
Figura 5.12: Tensao de saıda e corrente de saıda no conversor para o controlador robusto viaD-LQI Vg = 54V .
mudanca de carga, alem da ligeira oscilacao em Vo em ±3V aproximadamente, e vista uma
maior oscilacao da corrente IL e de Vo, mas a variacao de tensao pico a pico mantem-se de 6V .
0.25 0.3 0.35 0.4 0.45395
400
405
Tempo (s)
Ten
são
em v
olts
V0 controlado por LQI Robusto no PSIM, V
g=54V
0.25 0.3 0.35 0.4 0.450
5
10
15
Tempo (s)
Cor
rent
e em
(A
)
IL controlado por LQI Robusto no PSIM, V
g=54V
Figura 5.13: Tensao de saıda e corrente no indutor no conversor para o controlador robusto viaD-LQI Vg = 54V .
Diante das figuras mostradas nesta Subsecao, ve-se que o comportamento da tensao Vo e
das correntes Io e IL sao semelhantes com diferencas apenas quando a analise e mais detalhada,

5.3 Resposta do sistema em malha fechada do controle robusto 60
cuja diferenca prevalece apenas no efeito de rejeicao de ruıdos.
5.3.5 Analise de robustez das curvas na frequencia
A Tabela 5.1 mostra as frequencias de canto resultante de cada controlador em malha fe-
chada. As frequencias de canto sao representadas pela frequencia de cruzamento nos polos da
planta. A limitacao dessas frequencias e dada pela frequencia de corte em h1 = 19dB, que e
a frequencia dominante mınima definida em projeto. Como a ordem da matriz Am f e 3, por-
tanto, existem 3 frequencias de canto para o polinomio caracterıstico do modelo em malha
fechada. Observa-se que, na Tabela 5.1, o controle D-LQI apresenta frequencias maiores que
o D-Alocacao de polos. Contudo a diferenca entre as frequencias dos controles e pequena, o
que faz o desempenho dinamico de ambos os controles serem praticamente identicos no tempo.
Alem disso, na Tabela 5.1, ve-se que o modelo de otimizacao garantiu os valores das frequencias
entre as valores limites especificados.
Tabela 5.1: Frequencias de canto resultantes de cada controle.Regioes das frequencias de canto
h2 D-LQI D-Alocacao h16,25kHz 569,7Hz 481,1Hz 19,0Hz6,25kHz 35,1Hz 39,1Hz 19,0Hz6,25kHz 21,0Hz 20,2Hz 19,0Hz
Observa-se que, na Tabela 5.1, a frequencia de corte de banda passante das malhas resul-
tantes dos controles D-LQI e D-Alocacao sao, respectivamente, 21Hz e 20,2Hz. Como estes
valores sao muito proximos, os resultados no tempo tambem sao praticamente iguais como
mostrados nas Figuras 5.3-5.5.
A Tabela 5.2 mostra os autovalores do modelo em malha aberta e do modelo controlado
por cada processo de otimizacao LMI. Observa-se que os autovalores mantiveram-se dentro
das especificacoes de projeto das Secoes 4.2 e 4.3. Nessas secoes h1 = 19Hz, e h2 = 7,5kHz,
convertendo para rad/s h1 = −106,81rad/s, e h2 = −3.9270× 104rad/s. A base de calculo
de otimizacao LMI D-estabilidade deve ser feita em radianos por segundo, ja que o processo e
feito por limitacoes geometricas convexas no plano cartesiano complexo.
Observa-se que os polos de malha aberta do conversor na Tabela 5.2 apesar de serem
estaveis, possui os eixos reais proximos a origem e o valor imaginario cerca de 28 vezes maior
que o valor real, tornando-o o sistema bastante oscilatorio. Os valores de malha fechada tanto no
modelo por D-Alocacao como por D-LQI estao mais distantes da origem e sao reais, tornando
o sistema equivalente ao modelo de 1a Ordem.
Alem disso, e analisado o comportamento na frequencia em magnitude por diagrama de

5.3 Resposta do sistema em malha fechada do controle robusto 61
Tabela 5.2: Autovalores do modelo de malha aberta e fechada do conversor boost equivalente.Autovalores do conversor boost equivalente
h2 Malha aberta h1
−3.9270×104
−17,75+ j483,12
−106,81
−17,75+ j483,12Malha Fechada
D-LQI D-Alocacao−131,8 −110,3−220,8 −248,5−3579,5 −3266,8
Bode. Portanto, com base nas expressoes (5.4), (5.5) a (5.7), (2.61) e (2.69), sao obtidas as
seguintes funcoes de transferencias das incertezas multiplicativas:
∆m1(s) =−0,222s4−1,051×104s3−1,074×108s2−1,869×109s+3,203×1013
s4−1,03×104s3−3,738×108s2−2,007×10s−1,444×1014 ; (5.12)
∆m2(s) =−0,222s4−1,051×104s3−1,074×108s2−1,869×109s+3,203×1013
s4−1,03×104s3−3,738×108s2−2,007×1010s−1,444×1014 ; (5.13)
∆m3(s) =−0,6109s4−1,632×104s3−1,081×108s2−4,963×109s+3,198×1013
s4−1,031×104s3−3,737×108s2−1,834×1010s−1,444×1014 .
(5.14)
Deve-se observar que dentre estas incertezas, existe a mais representativa, ou seja, a condicao
de pior caso. A Figura 5.14 mostra as curvas na frequencia de cada uma das funcoes de trans-
ferencia das incertezas. E visto que ∆m1 e ∆m3 sao as mais representativas, sendo a primeira
mas adequada para analise de estabilidade robusta, pois e a curva que pode impedir o criterio
de estabilidade robusta com maior probabilidade entre as curvas de incertezas .
Deste modo, pode ser feita a analise via Bode dos modelos compensados pelos controles
D-Alocacao de polos e D-LQI. A Figura 5.15 mostra que o modelo compensado de ambos os
controladores possuem margens proximas, as margens de ganho dos controles D-Alocacao e D-
LQI sao, respectivamente de 33,9dB e de 35,5dB, isso para as frequencias de 185Hz e 200Hz
no modo |G( jω)K( jω)|. Ainda na Figura 5.15, as margens de fase em graus dos controles D-
Alocacao e D-LQI sao, respectivamente 76,9 e 76,6o, para as frequencias 12,7Hz e 12,6Hz,
ou seja, praticamente iguais em margens de fase.
Ja a Figura 5.16 mostra o comportamento tanto por sensibilidade como por sensibilidade
complementar. A regiao de cruzamento de T ( jω) e T ( jω) e cerca de −1,86dB ou 0,8 de am-
plitude e 12.8Hz de frequencia de rejeicao. A exemplo da perturbacao de tensao de entrada Vg
cuja amplitude de perturbacao e de 12V (aproximadamente 21dB) e frequencia de 20Hz e facil-
mente rejeitada pela acao dos dois controladores. Considerando ainda o ruıdo do chaveamento

5.3 Resposta do sistema em malha fechada do controle robusto 62
10−1
100
101
102
103
104
105
106
−70
−60
−50
−40
−30
−20
−10
0
10
20
SVD Aplicado às Incertezas Multiplicativas
Frequência (Hz)
Am
plitu
de (
dB)
∆m1
∆m2
∆m3
Figura 5.14: Comparacao de incertezas na escolha da mais representativa.
−150
−100
−50
0
50
Mag
nitu
de (
dB)
100
101
102
103
104
105
106
90
135
180
225
270
Pha
se (
deg)
Análise no domínio da frequência de G(jω)K(jω)
Frequência (Hz)
D−LQI
D−alocação
Figura 5.15: Analise da curva G( jω)K( jω).

5.4 Consideracoes finais 63
nos diodos, o valor equivalente em dB e cerca de 1dB, no pior caso, para a frequencia de chave-
amento de 25kHz. Portanto, o sistema compensado garantiu a robustez diante das pertubacoes
de projeto.
10−2
100
102
104
−120
−100
−80
−60
−40
−20
0
20
Composição T(jω) e S(jω) do Sistema Compensado
Frequência (Hz)
Am
plitu
de (
dB)
D−LQI
D−alocação
S
T
Figura 5.16: Curvas de S( jω) e T ( jω) do modelo compensado por D-Alocacao de polos eD-LQI.
A Figura 5.17 mostra que os controladores sao robustos diante das especificacoes de pro-
jeto, pois nao existe nenhum ponto de cruzamento entre as curvas de 1/T e a incerteza mais
representativa. Esta afirmacao e com base em (2.66).
5.4 Consideracoes finais
Neste capıtulo sao mostrados os resultados de simulacao do modelo original do conversor
atraves dos ganhos e das matrizes numericas do conversor equivalente. Alem disso, sao ana-
lisados as curvas no tempo do conversor original tanto no regime transitorio como no regime
permanente. Cita-se ainda que sao feitas analises das incertezas e, com base nestas, sao fei-
tas a analise de estabilidade robusta, comprovando que as estrategias de controle adotadas sao
robustas dentro dos parametros de projeto.

5.4 Consideracoes finais 64
10−1
100
101
102
103
104
105
106
−20
0
20
40
60
80
100
120
140
160
Análise de Estabilidade por Alocação Robusta
Frequência (Hz)
Am
plitu
de (
dB)
1/T D−LQI
1/T D−alocação
∆m3
Figura 5.17: Analise de estabilidade robusta dos controladores D-Alocacao de polos e D-LQIem relacao a incerteza ∆m3.

65
6 Analise e Resultados Experimentais doConversor
Este capıtulo mostra os resultados experimentais do conversor original. Para isso, sao
obtidos os parametros fısicos necessarios com base nos ganhos dos controladores do modelo
equivalente e entao e montado o controlador fısico. Sao mostrados a topologia real, e seu cir-
cuito. Alem disso, sao analisados os resultados experimentais do modelo tanto do controle
D-Alocacao de polos como do controle por D-LQI.
6.1 Ambiente real de implementacao
A Figura 6.1 mostra o circuito eletrico do conversor. Os detalhes da configuracao e construcao
do sistema fısico e implementado por Reis (2012). A Figura 6.1 e composta, alem do conversor,
do sensor de corrente, do controlador robusto e dos sensores de tensao do circuito.
Na Tabela 6.1 sao mostradas os valores dos resistores utilizados para implementacao pratica
conforme a Figura 6.1. Alem disso, e mostrada as respectivas expressoes para obtencao de tais
valores, bem como os componentes comerciais utilizados para o controlador. Os valores do
ganho do controlador podem ser vistos em (5.8) e (5.10). Tais valores obtidos sao automatica-
mente convertidos para o controle do sistema real do conversor original. Portanto, a obtencao
dos componentes do controlador da Tabela 6.1 incluem a conversao do ganho do conversor
equivalente para o modelo original.
Tabela 6.1: Valores utilizados para implementacao pratica.D-Alocacao D-LQI
Parametros Expressao Obtido Adotado Obtido AdotadoKdi f f eedback1 Kdi f f eedback1 = 10kΩ
5e−3ΩK1 33,8kΩ 33kΩ 39,216kΩ 27kΩ+12kΩ
Kdi f f eedback2 Kdi f f eedback2 = Kdi f f eedback1 33,8kΩ 33kΩ 39,216kΩ 27kΩ+12kΩ
Ry Ry =(
1−70V×10nF×K3
)−2,5kΩ 80,354kΩ 81kΩ 72,212kΩ 68kΩ+3,9kΩ
KxvC KxvC = rv10kΩ
K2−10kΩ 341,36kΩ 330kΩ+10kΩ 296,40kΩ 270kΩ+22kΩ
Para implementacao experimental no conversor, utilizou-se uma fonte 250V e 50A presente
no GPEC. Alem disso, para aquisicao dos dados, fez-se uso de um osciloscopio digital com 4
canais. As cargas utilizadas sao de resistencia linear de modo que foram ajustadas para garantir

6.1 Ambiente real de implementacao 66
Figura 6.1: Diagrama geral do circuito com a configuracao de controle.

6.2 Resultados experimentais do controle D-Alocacao de polos robusto 67
o degrau de carga de 250W e 500W . A Figura 6.2 mostra o circuito real do conversor boost
original e seus componentes.
Figura 6.2: Conversor boost original.
6.2 Resultados experimentais do controle D-Alocacao de
polos robusto
6.2.1 Resultados experimentais para Vg = 42V
Para implementacao experimental do controle D-Alocacao de polos aplicado ao conversor
boost de Alto Ganho, considerou-se Vg = 42V e IL = 6,5 a 12,8A. Portanto, a potencia de
entrada variou entre 273−500W para que fosse satisfeita a variacao de potencia de saıda entre
250−500W durante o procedimento com degrau de carga.
Na Figura 6.3, observa-se o comportamento experimental da tensao de saıda Vo = 400V , da
corrente de saıda Io = 625mA a 1250mA e o sinal de PWM dado no ciclo de trabalho em 70%.
Na Figura 6.3(a), ve-se que o ciclo de trabalho nao se altera com o aumento de carga como e
visto na Figura 6.3(b). O valor de regime em Vo = 400 nao se altera e nao ha nenhuma oscilacao
anormal por conta da mudanca de carga.
Na Figura 6.4, observa-se o comportamento da tensao Vo no instante do degrau de carga
com base na variacao da corrente de saıda Io. No momento do aumento de carga na Figura
6.4(a), ve-se que Vo mantem-se estavel com poucas oscilacoes. No instante da reducao de
carga tambem nao ocorre oscilacao como mostra a 6.4(b). Portanto, a estrategia de controle

6.2 Resultados experimentais do controle D-Alocacao de polos robusto 68
(a) Representacao para meia carga.
(b) Representacao para carga nominal.
Figura 6.3: Tensao e corrente de saıda, sinal de controle aplicada ao conversor em regimepermanente. Canal Vo 100V/div, canal Io 200mA/div e canal VPWM 20V/div. Eixo do tempo
(horizontal) 10µs/div.

6.2 Resultados experimentais do controle D-Alocacao de polos robusto 69
D-Alocacao robusta garantiu a manutencao de Vo de regime permanente durante a variacao de
carga em regime permanente.
(a) Representacao de meia carga para carga nominal.
(b) Representacao da carga nominal para meia carga.
Figura 6.4: Tensao e corrente de saıda durante a mudanca do degrau de carga. Canal Vo100V/div, canal Io 200mA/div. Eixo do tempo (horizontal) 1ms/div para Figura 6.4(a) e
20ms/div para Figura 6.4(b).
Na Figura 6.5, analisa-se o comportamento da tensao Vo em analise CA no momento dos

6.3 Resultados experimentais do controle D-LQI robusto 70
degraus de carga. Tanto na Figura 6.5(a) como na Figura 6.5(b) a tensao de subida e de descida
devido a variacao de carga oscilam ±2V . Portanto a tensao de pico a pico em regime com
variacao no degrau de carga e de 4V , o que corresponde a 1% da tensao de regime permanente
de Vo. Na descida do degrau de carga a variacao e mais abrupta, como mostra a Figura 6.5(b),
entretanto como o valor de ±2V e pouco representativo em relacao a Vo = 400V .
6.2.2 Resultados experimentais para Vg = 54V
Nesta implementacao experimental do controle D-Alocacao de polos, considerou-se Vg =
54V e IL = 5−10,5A. Portanto a potencia de entrada variou entre 270−567W para que fosse
satisfeita a variacao de potencia de saıda entre 250−500W durante o procedimento com degrau
de carga.
Na Figura 6.6, observa-se que Vo, Io e o sinal de controle PWM nao sofreram mudancas em
relacao as condicoes para Vg = 42V . Os valores sao praticamente identicos aos da Figura 6.3
sendo que o ciclo de trabalho para Vg = 54V e um pouco inferior que para condicao Vg = 42V .
Logo, ve-se que o controlador robusto garante a referencia mesmo com a mudanca de ciclo de
trabalho do conversor.
Alem disso, na Figura 6.7, Vo mantem-se estavel tanto na subida de carga de acordo com
a Figura 6.7(a), como tambem no instante da descida de carga como e observada na Figura
6.7(b). Logo, o controlador robusto D-Alocacao garante a referencia de regime nos instantes
da variacao do degrau de carga.
Utilizando a mesma analise feita para Figura 6.5, na Figura 6.8, a oscilacao de tensao
tambem e de±2V para o aumento e diminuicao de carga no conversor. Portanto nao ha variacao
significativa na analise CA para o conversor controlado para Vg = 54V .
Na Figura 6.9, e feita a analise levando-se em consideracao a variacao da corrente no indutor
IL. Observa-se que existe uma pequena oscilacao em Vg no modo de operacao em carga nominal.
A faixa de oscilacao e de cerca de ±1V , valor que nao compromete o desempenho de regime
permanente. A oscilacao existente em IL trata-se do ripple natural de projeto.
6.3 Resultados experimentais do controle D-LQI robusto
6.3.1 Resultados experimentais para Vg = 42V
A implementacao experimental do controle D-LQI aplicado ao conversor boost de alto
ganho de tensao com celula de comutacao de tres estados acontece de forma analoga ao experi-
mento da Subsecao 6.2.1. Considerou-se Vg = 42V e IL = 6,5−12,8A. Portanto a potencia de
entrada variou entre 273−500W para que fosse satisfeita a variacao de potencia de saıda entre

6.3 Resultados experimentais do controle D-LQI robusto 71
(a) Representacao de meia carga para carga nominal.
(b) Representacao da carga nominal para meia carga.
Figura 6.5: Tensao e corrente de saıda no momento do degrau de carga . Canal Vo 2V/div,canal Io 200mA/div. Eixo do tempo (horizontal) 20ms/div.

6.3 Resultados experimentais do controle D-LQI robusto 72
(a) Representacao para meia carga.
(b) Representacao para carga nominal.
Figura 6.6: Tensao e corrente de saıda e sinal de PWM aplicado ao conversor para Vg = 54Vem regime permanente. Canal Vo 100V/div, canal Io 200mA/div. Eixo do tempo (horizontal)
10µs/div.

6.3 Resultados experimentais do controle D-LQI robusto 73
(a) Representacao de meia carga para carga nominal.
(b) Representacao da carga nominal para meia carga.
Figura 6.7: Tensao e corrente de saıda durante a mudanca do degrau de carga para Vg = 54V .Canal Vo 100V/div, canal Io 200mA/div. Eixo do tempo (horizontal) 20ms/div.

6.3 Resultados experimentais do controle D-LQI robusto 74
(a) Representacao de meia carga para carga nominal.
(b) Representacao da carga nominal para meia carga.
Figura 6.8: Tensao e corrente de saıda no momento do degrau de carga. Canal Vo 2V/div,canal Io 200mA/div. Eixo do tempo (horizontal) 20ms/div.

6.3 Resultados experimentais do controle D-LQI robusto 75
(a) Representacao de meia carga para carga nominal.
(b) Representacao da carga nominal para meia carga.
Figura 6.9: Tensao de saıda, tensao de entrada e corrente no indutor no momento do degrau decarga. Canal Vo 100V/div, canal Vg 20V/div e o canal IL 5A/div. Eixo do tempo (horizontal)
20ms/div.

6.3 Resultados experimentais do controle D-LQI robusto 76
250−500W durante o procedimento com degrau de carga.
A Figura 6.10 mostra o desempenho do processo controlado pelo controle D-LQI robusto.
Observa-se que a diferenca em relacao a Figura 6.3 esta na menor quantidade de ruıdo presente
no VPWM. No ambito geral, nao existe diferencas visıveis de desempenho em regime perma-
nente.
Ja na Figura 6.11, observa-se desempenho analogo aos resultados utilizando o controle D-
Alocacao de polos. Por possuırem resultados parecidos durante a simulacao. E possıvel que os
resultados experimentais nestes casos sejam bastante semelhantes, cuja diferenca esta apenas
no nıvel de oscilacao da tensao em Vo.
Na Figura 6.12, ve-se que a oscilacao na analise CA e de ±2V , similar ao processo contro-
lado por D-Alocacao de polos. No entanto, a oscilacao e mais suave e um pouco mais rapida
que o da estrategia de controle da Subsecao 6.2.1. De um modo geral, as respostas do D-LQI
satisfazem as especificacoes tanto quanto o controle por D-Alocacao de polos, quanto a analise
CA do processo no momento de mudanca de carga.
A Figura 6.13 mostra que, durante a subida de carga, existe uma reducao da tensao de
entrada Vg. Essa reducao chega a ser de 2V , diferente da oscilacao de ±1V do controle por
D-Alocacao de polos. Apesar da oscilacao, observa-se que a estrategia de controle D-LQI
garante a estabilidade, mas com algumas diferencas do controle por D-Alocacao robusta quanto
a variacao de Vg durante a mudanca de carga.
6.3.2 Resultados experimentais para Vg = 54V
A implementacao experimental do controle D-LQI ocorre de forma analoga ao controle por
D-Alocacao da Subsecao 6.2.2. Considerou-se Vg = 54V e IL = 5−10,5A. Portanto a potencia
de entrada variou entre 270− 567W para que fosse satisfeita a variacao de potencia de saıda
entre 250−500W durante o procedimento com degrau de carga.
Na Figura 6.14, mostra-se que Vo nao sofre alteracao visıvel durante a mudanca de degrau
de carga. A corrente no indutor IL sofre uma oscilacao de carga de acordo com a Figura 6.14(a),
mas e algo que nao aparece na Figura 6.15.
A Figura 6.15 mostra a analise CA em relacao a corrente do indutor IL. Ve-se que a
oscilacao se mantem dentro de ±2V , isto no momento da mudanca de carga. Portanto a es-
trategia de controle D-LQI garante a referencia de Vo tanto com Vg = 42V como com Vg = 54V .
Ja a Figura 6.16 mostra situacao analoga a Figura 6.13. Observa-se que existe uma oscilacao
durante a mudanca de carga de valor 2V , porem nao compromete o desempenho do sistema, ja
que a referencia de saıda e garantida durante a analise das figuras anteriores.
A Figura 6.17 mostra, de forma detalhada, a oscilacao persistente em IL. Trata-se do ripple

6.3 Resultados experimentais do controle D-LQI robusto 77
(a) Representacao para meia carga.
(b) Representacao para carga nominal.
Figura 6.10: Tensao e corrente de saıda e sinal de PWM para o controle D-LQI, sendoVg = 42V .Canal Vo 100V/div, canal Io 200mA/div. Eixo do tempo (horizontal) 10µs/div.

6.3 Resultados experimentais do controle D-LQI robusto 78
(a) Representacao de meia para plena carga.
(b) Representacao de plena para meia carga.
Figura 6.11: Tensao e corrente de saıda para o controle D-LQI com variacao de carga, sendoVg = 42V . Canal Vo 100V/div, Io 200mA/div. Eixo do tempo (horizontal) 5ms/div para
Figura 6.11(a) e 20ms/div para Figura 6.11(b).

6.3 Resultados experimentais do controle D-LQI robusto 79
(a) Representacao para meia carga.
(b) Representacao para carga nominal.
Figura 6.12: Tensao e corrente de saıda, sendo Vg = 42V . Canal Vo 2V/div, Io 200mA/div.Eixo do tempo (horizontal) 20ms/div.

6.3 Resultados experimentais do controle D-LQI robusto 80
(a) Representacao para meia carga.
(b) Representacao para carga nominal.
Figura 6.13: Tensao de saıda, tensao de entrada e corrente no indutor, sendo Vg = 42V . CanalVo 100V/div, canal Vg 20V/div e canal IL 5A/div. Eixo do tempo (horizontal) 20ms/div.

6.3 Resultados experimentais do controle D-LQI robusto 81
(a) Representacao de meia carga para carga nominal.
(b) Representacao de carga nominal para meia carga.
Figura 6.14: Tensao de saıda, corrente no indutor para o controle D-LQI, sendo Vg = 54V .Canal Vo 100V/div, canal IL 5A/div. Eixo do tempo (horizontal) 200ms/div para Figura
6.14(a) e 50ms/div para Figura 6.14(b) .

6.3 Resultados experimentais do controle D-LQI robusto 82
(a) Representacao de meia para plena carga.
(b) Representacao da carga nominal para meia carga.
Figura 6.15: Tensao de saıda, corrente no indutor com variacao de carga, sendo Vg = 54V .Canal Vo 2V/div, canal IL 5A/div. Eixo do tempo (horizontal) 20ms/div.

6.3 Resultados experimentais do controle D-LQI robusto 83
(a) Representacao para meia carga.
(b) Representacao para carga nominal.
Figura 6.16: Tensao de saıda, corrente no indutor, sendo Vg = 54V .Canal Vo 100V/div, canalVg 20V/div e canal IL 5A/div. Eixo do tempo (horizontal) 20ms/div.

6.4 Complicacoes durante o experimento 84
natural de projeto, neste caso, ∆IL = 10%IL de regime permanente em plena carga. Para o caso
de Vg = 54V , IL = 10,5A , ∆IL = 1,05A, este valor aproximado e o valor visto na forma de onda
de IL na Figura 6.17.
Figura 6.17: Tensao de saıda, corrente no indutor para o controle D-LQI em regimepermanente, sendo Vg = 54V .Canal Vo 100V/div, canal IL 5A/div. Eixo do tempo (horizontal)
20µs/div.
6.4 Complicacoes durante o experimento
Para implementacao do degrau de carga, fez-se uso de um disjuntor termomagnetico para
simular o degrau de carga, acrescentando ou retirando as cargas paralelas lineares conforme a
necessidade de analise. No instante da descida de carga, observa-se nas figuras, como na Figura
6.11(b) por exemplo, uma ligeira curva. Esta curva deve-se a tentativa do disjuntor manter-
se no estado ligado por conta do fenomeno do arco eletrico envolvido durante o processo de
desligamento.
6.5 Consideracoes finais
Neste capıtulo, foram mostrados o dispositivo fısico alem do circuito de controle juntamente
com os parametros fısicos de implementacao. Cita-se ainda a analise das curvas experimentais
das estrategias de controle adotadas, incluindo as formas de onda da tensao de entrada, as
curvas tensao na carga, as curvas da corrente no indutor e as curvas de corrente na carga, alem
das curvas de PWM.

85
7 Conclusoes Finais e Propostas de TrabalhosFuturos
7.1 Conclusoes
O levantamento bibliografico feito neste trabalho mostrou que o estudo de estrategias de
controle via LMIs em conversores de potencia e uma area a ser explorada no campo da pesquisa.
Isso e comprovado com o uso de estrategias de controle como o D-LQI e o D-Alocacao de
polos via LMIs em um conversor boost de alto ganho de tensao com celula de comutacao de
tres estados .
Observa-se ainda que o processo de otimizacao via LMI e bastante versatil, por que basta
modificar algumas restricoes e ja se tem uma nova estrategia de controle capaz de resolver o
problema relacionado a estabilidade. O uso do teorema de estabilidade de Lyapunov e ape-
nas uma das formas de estabilizacao via LMI. Portanto ainda podem existir outras formas de
estabilizacao de sistemas via LMIs.
Alem disso, a restricao dos autovalores do modelo em malha fechada por D-estabilidade
mostra-se eficaz pois os autovalores resultantes situaram-se dentro das regioes especificadas.
Isto e de singular importancia, pois a violacao de tais restricoes, especialmente a restricao da
barreira de 25% da frequencia nominal, e comprometedor para o conversor, podendo causar a
instabilidade do processo decorrente do cruzamento da frequencia de chaveamento do conversor
e a frequencia de canto da funcao de transferencia em malha fechada do conversor.
Uma contribuicao deste trabalho esta nas restricoes impostas dos autovalores na otimizacao
LMI, que e uma maneira de garantir regioes factıveis de controle sem comprometer os limites
fısicos de implementacao. Isso e vantajoso e versatil, pois estas restricoes podem ser modifica-
das ou acrescentadas dependendo da necessidade do projetista. Essa e uma das vantagens do uso
do processo de otimizacao LMI, observando sempre os criterios de convergencia e factibilidade.
O problema da modelagem no espaco de estados medio com D 6= 0 foi solucionado pelas
estrategias de controle propostas, isto porque a matriz D 6= 0 e referente ao modelo final no
espaco de estados medio do conversor em malha aberta. Tanto o controle D-LQI como o D-
Alocacao de polos solucionaram facilmente o problema. Isso e mostrado variando-se Vg e a

7.2 Propostas de trabalhos futuros 86
potencia na carga. Os resultados mostram que a estabilidade manteve-se garantida, mesmo com
o problema de modelagem D 6= 0.
Outra contribuicao deste trabalho e mostrada na analise de incertezas e de robustez diante do
processo de estabilizacao via LMI. Isto porque para que seja garantida a estabilidade robusta e
necessaria que as condicoes de robustez sejam satisfeitas. Deste modo, os resultados mostrados
neste trabalho visam reforcar o conceito de robustez via LMIs. Contudo, tanto o controle D-
LQI como o D-Alocacao de polos garantem a factibilidade mas nao garantem a robustez em
pontos de operacao mais agressivos caso seja aumentado a variacao de tensao Vg.
Alem disso, este trabalho mostra os resultados experimentais obtidos do conversor origi-
nal, validando as simulacoes feitas via PSIM. Algumas variacoes do resultado experimental em
relacao ao resultados de simulacao devem-se ao fato de que o conversor real possui mecanis-
mos de protecao como soft-starter e um capacitor eletrolıtico na entrada do conversor de modo
a suavizar os efeitos do processo de partida e oscilacoes da tensao de entrada decorrentes de
ruido. Detalhes do projeto de implementacao do conversor real sao vistos no trabalho de Reis
(2012). Deste modo, mostra-se que a modelagem e as estrategias de controle adotadas garanti-
ram a estabilidade da planta e os parametros desejados de projeto. Isto porque o conversor foi
submetido aos testes conforme as especificacoes levantadas em projeto e seus resultados foram
compatıveis aos resultados analisados via simulacao. Deste modo, observa-se que os controles
D-LQI e D-Alocacao de polos mostram-se como estrategias de controle viaveis para o projeto
de controle com estabilidade robusta.
7.2 Propostas de trabalhos futuros
• Utilizar o controle via LMIs por compensacao paralela - PDC - com logica fuzzy em
conversores CC-CC com o objetivo de garantir a robustez em ampla faixa de operacao.
• Aplicar o conceito de LQG robusto, que e a uniao do controle LQR via LMI com o Filtro
de Kalman via LMI.
• Expandir o conceito de controle robusto via LMI em outros conversores de potencia como
inversores e conversores multinıveis.
• Aplicar o conceito de controle robusto via LMIs por lema de Finsler, pois este conceito
trabalha com variaveis de folga que permitem um processo de otimizacao mais preciso
e cuja norma dos controladores sao menores que a norma dos controles otimizados via
LMI por Lyapunov(BUZACHERO, 2010).

87
Referencias Bibliograficas
ARANGO, E. et al. Lqr control of an asymmetrical interleaved boost converter workingin inherent dcm. In: Industrial Electronics, 2005. ISIE 2005. Proceedings of the IEEEInternational Symposium on. [S.l.: s.n.], 2005. v. 2, p. 721 – 726 vol. 2.
ARAUJO, S.; TORRICO-BASCOPE, R.; TORRICO-BASCOPE, G. Highly efficient highstep-up converter for fuel-cell power processing based on three-state commutation cell.Industrial Electronics, IEEE Transactions on, v. 57, n. 6, p. 1987 –1997, june 2010. ISSN0278-0046.
ASSUNCAO, E.; ANDREA, C. Q.; TEIXEIRA, M. C. M. Alocacao de zeros aplicada asistemas de controle via lmi. Revista Controle e Automacao, Sao Paulo, v. 18, n. 1, Janeiro,Fevereiro e Marco 2007.
BASCOPE, G.; BARBI, I. Generation of a family of non-isolated dc-dc pwm converters usingnew three-state switching cells. In: POWER ELECTRONICS SPECIALISTS CONFERENCE,2000. PESC 00. 2000 IEEE 31ST ANNUAL, 31th., 2000. Anais... [S.l.]: IEEE, 2000. v. 2, p.858 –863 vol.2. ISSN 0275-9306.
BERNUSSOU, J.; PERES, P.; GEROMEL, J. A linear programming orientedprocedure for quadratic stabilization of uncertain systems. Systems and Con-trol Letters, v. 13, n. 1, p. 65 – 72, 1989. ISSN 0167-6911. Disponıvel em:<http://www.sciencedirect.com/science/article/pii/0167691189900224>.
BOYD, S.; BARRATT, C. Linear controller design: limits of performance. USA:Prentice-Hall, 1991. 426 p.
BOYD, S. et al. Linear matrix inequalities in system and control theory. Philadelphia,USA: Society for Industrial and Applied Mathematics - SIAM - Philadelphia, 1994. 205 p.(SIAM studies in applied mathematics). ISBN 0-89871-334-X.
BRYANT, B.; KAZIMIERCZUK, M. K. Voltage-loop power-stage transfer functions withmosfet delay for boost pwm converter operating in ccm. Industrial Electronics, IEEETransactions on, v. 54, n. 1, p. 347 –353, feb. 2007. ISSN 0278-0046.
BUZACHERO, L. F. S. Otimizacao de controladores robustos de sistemas dinamicossujeitos a falhas estruturais. 74 f. Dissertacao (Mestrado em Engenharia Eletrica) —Faculdade de Engenharia de Ilha Solteira da Universidade Estadual Paulista - UNESP, IlhaSolteira, 2010.
CASALE, M. DiLorenzo del et al. Nominal and tolerance design of closed-loop controllers fordc-dc voltage regulators. In: Circuits and Systems, 2002. ISCAS 2002. IEEE InternationalSymposium on. [S.l.: s.n.], 2002. v. 4, p. IV–747 – IV–750 vol.4.
CHEN. Linear System Theory and Design. Oxford Oxfordshire: Oxford University Press,1999. ISBN 0195117778.

Referencias Bibliograficas 88
CHILALI, M.; GAHINET, P. H infin; design with pole placement constraints: an lmi approach.Automatic Control, IEEE Transactions on, v. 41, n. 3, p. 358 –367, mar 1996. ISSN0018-9286.
COSTA, M. V. et al. Analise teorica e experimental de um conversor boost de altoganho com celula de comutacao 3 estados controlada por d-alocacao de polos robustaotimizada via lmis. In: CBA2012 (). Campina Grande, PB: [s.n.], 2012. Disponıvel em:<http://XXXXX/97893.pdf>.
DORF, R. C.; BISHOP, R. H. Modern Control Systems. [S.l.]: Addison-Wesley, 1998. ISBN0201308649.
DULLERUD, G. E.; PAGANINI, F. G. A course in robust control the-ory: a convex approach. USA: Autoria propria, 2000. 396 p. Disponıvel em:<www.das.ufsc.br/ trofino/disciplinas/das-6600>.
ERICKSON, R. Fundamentals of power electronics. Norwell, Mass: Kluwer Academic,2001. ISBN 0792372700.
FARIA, F. A. Resolvendo LMIs no MATLAB com os pacotes Yalmip e Sedumi. [S.l.].
FARIA, F. A. Alocacao de Polos com Realimentacao da Derivada dos Estados usandoLMIs. 53 f. Dissertacao (Mestrado em Engenharia Eletrica) — Faculdade de Engenharia deIlha Solteira da Universidade Estadual Paulista - UNESP, Ilha Solteira, 2005.
FARIA, F. A. Projetos de Controladores Baseados em LMI usando Realimentacao daDerivada dos Estados. 114 f. Tese (Doutorado em Engenharia Eletrica) — Faculdade deEngenharia de Ilha Solteira da Universidade Estadual Paulista - UNESP, Ilha Solteira, 2009.
FERON, E.; APKARIAN, P.; GAHINET, P. Analysis and synthesis of robust control systemsvia parameter-dependent lyapunov functions. IEEE Transactions on Automatic Control,Patras, Greece, v. 41, n. 7, p. 1041–1046, Jul. 1996.
FILHO, C. R. A. Controle otimo H infinito e H2 com alocacao de polos e modificacao dezeros para rastreamento de sinais e rejeicao de disturbios em sistemas de controle usandoLMIs. 56 f. Dissertacao (Mestrado em Engenharia de Eletrica) — Universidade EstadualPaulista - UNESP, Ilha Solteira, SP, Brasil, 2007.
GABE, I. J. Contribuicao ao controle de inversores PWM alimentados em tensaoconectados a rede atraves de filtros LCL. 131 f. Dissertacao (Mestrado em EngenhariaEletrica) — Universidade Federal de Santa Maria - UFSM, Santa Maria, RS, Brasil, 2008.
GAHINET, P.; NEMIROVSKI, A. J. L. A.; CHILALI, M. LMI control toolbox users guide.Natick, MA: MathWorks Inc, 1995. 356 p.
GARCERA, G.; ABELLAN, A.; FIGUERES, E. Sensitivity study of the control loops ofdc-dc converters by means of robust parametric control theory. Industrial Electronics, IEEETransactions on, v. 49, n. 3, p. 581 –586, jun 2002. ISSN 0278-0046.
GEZGIN, C.; HECK, B.; BASS, R. Control structure optimization of a boost converter: anlqr approach. In: Power Electronics Specialists Conference, 1997. PESC ’97 Record., 28thAnnual IEEE. [S.l.: s.n.], 1997. v. 2, p. 901 –907 vol.2. ISSN 0275-9306.

Referencias Bibliograficas 89
GHAOUI, L. E. et al. Numerical methods for h2 related problems. In: AMERICANCONTROL CONFERENCE, 1992, Minneapolis. Proceedings. Chicago, IL, USA: AACC,1992. p. 2. Ref. 1–2.
JOHNSON, E.; ERKUS, B. Investigation of dissipativity for control of smart dampers via lmisynthesis. In: American Control Conference, 2005. Proceedings of the 2005. [S.l.: s.n.],2005. p. 3084 – 3089 vol. 5. ISSN 0743-1619.
KO, H. S. et al. A new lmi representation of lqr based voltage control of grid-connected windfarm. In: AMERICAN CONTROL CONFERENCE, 26., 2006, Minneapolis. Proceedings.Minneapolis, Minnesota, USA: AACC, IFAC, 2006. p. 6. Ref. 851–856.
LEUNG, F.; TAM, P.; LI, C. The control of switching dc-dc converters-a general lwr problem.Industrial Electronics, IEEE Transactions on, v. 38, n. 1, p. 65 –71, feb 1991. ISSN0278-0046.
. An improved lqr-based controller for switching dc-dc converters. Industrial Electronics,IEEE Transactions on, v. 40, n. 5, p. 521 –528, oct 1993. ISSN 0278-0046.
MACIEJOWSKI, J. Multivariable feedback design. Wokingham, England Reading, Mass:Addison-Wesley, 1989. ISBN 0201182432.
MIDDLEBROOK, R. D.; CUK, S. A general unified approach to modeling swit-ching converter power stage. In: IEEE POWER ELECTRONICS SPECIALISTSCONFERENCE RECORD, 1976. Anais... IEEE, 1976. p. pp. 18–34. Disponıvel em:<http://www.ee.bgu.ac.il/ kushnero/temp/guamicuk.pdf>. Acesso em: 26 set. 2011.
MOHAN, N. Power electronics : converters, applications, and design. New York: Wiley,1995. ISBN 0471584088.
. First course on power electronics and drives. Minneapolis: MNPERE, 2003. ISBN0971529221.
MONTAGNER, V. F.; DUPONT, F. A robust lqr applied to a boost converter with responseoptimized using a genetic algorithm. In: CONGRESSO BRASILEIRO DE AUTOMATICA,XVIII., 2010, Mato Grosso do Sul. Anais... Bonito, MS, Brasil: SBA, 2010. p. 2297–2302.
OGATA, K. Discrete-Time Control Systems. 2nd. ed. New Jersey: Prentice Hall, 1986. 745 p.ISBN 0-13-216-102-8.
. Engenharia de Controle Moderno. 4a. ed. Sao Paulo: Prentice-Hall, 2003. 788 p.ISBN 85-87918-23-0.
OLALLA, C. et al. Robust lqr control for pwm converters: an lmi approach. IEEETransactions on Industrial Eletronics, Tarragona, Spain, v. 56, n. 7, p. 2548–2558, Jul. 2009.
OLIVEIRA, R. C. L. F.; PERES, P. L. D. Analise e controle de sistemas lineares por meio de de-sigualdades matriciais lineares. In: CONGRESSO BRASILEIRO DE AUTOMATICA, XVIII.,2010, Bonito, MS. Tutoriais do XVIII Congresso Brasileiro de Automatica: Mini-curso.2010. Disponıvel em: <http://www.dt.fee.unicamp.br/ ricfow/miniCursoCBA2010.htm>.Acesso em: 28 ago. 2011.

Referencias Bibliograficas 90
ORELLANA-LAFUENTE, C. et al. Modelagem simplificada e controle do conversor cc-ccboost de alto ganho de tensao. In: CONGRESSO BRASILEIRO DE AUTOMATICA, XVIII.,2010, Mato Grosso do Sul. Anais... Bonito, MS, Brasil: SBA, 2010. p. 4056–4061.
PALHARES, R. M.; GONCALVES, E. N. Enciclopedia de automatica controle eautomacao. Sao Paulo: Blucher, 2008. 469 p. (Enciclopedia de automatica, v. 1). ISBN978-85-212-0410-7.
PERES, P. L. D. Notas de aula de teoria dos sistemas lineares - IA536A: Material didatico.2011. Disponıvel em: <http://www.dt.fee.unicamp.br/ sala225/ia536/ia536.html>. Acessoem: 28 ago. 2011.
POMILIO, J. A. Apostila de Fontes Chaveadas - Capıtulo 8: Material didatico. 2011.Disponıvel em: <http://www.dsce.fee.unicamp.br/ antenor/pdffiles/CAP8.pdf>. Acesso em:22 set. 2011.
RASHID, M. H. Power electronics handbook. San Diego: Academic Press, 2001. ISBN0125816502.
REIS, F. E. U. Conversor CC/CC com dois estagios para aplicacao em sistemasfotovoltaicos autonomos de energia. 153 f. Dissertacao (Mestrado em Engenharia Eletrica)— Programa de Pos-Graduacao e Engenharia Eletrica, Fortaleza, 2012.
REIS, F. E. U.; BASCOPE, R. P. T.; COSTA, M. V. S. Lqr control with integral action appliedto a high step-up dc-dc converter. In: CONGRESSO BRASILEIRO DE ELETRONICA DEPOTENCIA - COBEP, IX., 2011, Rio Grande do Norte. Anais... Natal, RN, Brasil: SOBRAEP,2011. p. 1380–1388.
ROSSI, F. Q.; TEIXEIRA, M. C. M.; ASSUNCAO, E. Controlador robusto com realimentacaoderivativa e alocacao de polos usando lmi para supressao de vibracao em sistema mecanico. In:CONFERENCIA BRASILEIRA DE DINAMICA, CONTROLE E APLICACOES - DINCON,7th., 2007, Presidente Prudente. Anais... Sao Paulo, Brasil: SBA, 2007. p. 7. Ref. 1–7.
SANTERO, T. N. Celula de Comutacao de Tres Estados Aplicada ao Pre-regulador Boostde Estagio Unico e Elevado Fator de Potencia. 122 f. Dissertacao (Mestrado em Engenhariade Eletrica) — Universidade Estadual Paulista - UNESP, Ilha Solteira, SP, Brasil, 2006.
SHAHIAN, B.; HASSUL, M. Control system design using Matlab. [S.l.]: Prentice Hall,1993. ISBN 9780131740617.
SIRA-RAMIREZ, H.; SILVA-ORTIGOZA, R. Control design techniques in powerelectronics devices. London: Springer, 2006. ISBN 9781846284588.
SKOGESTAD, S.; POSTLETHWAITE, I. Multivariable Feedback Control: Analysis andDesign. [S.l.]: Wiley, 2005. ISBN 047001167X.
SOUZA, V. M. Projeto de controlador robusto via otimizacao convexa. 87 f. Dissertacao(Mestrado em Engenharia de Eletricidade) — Universidade Federal do Maranhao - UFMA,Sao Luis, MA, 2002.

Referencias Bibliograficas 91
TODOROVIC, M.; PALMA, L.; ENJETI, P. Design of a wide input range dc-dc converter witha robust power control scheme suitable for fuel cell power conversion. In: Applied PowerElectronics Conference and Exposition, 2004. APEC ’04. Nineteenth Annual IEEE. [S.l.:s.n.], 2004. v. 1, p. 374 – 379 Vol.1.
TORRICO-BASCOPE, G. et al. A generalized high voltage gain boost converter based onthree-state switching cell. In: IEEE Industrial Electronics, IECON 2006 - 32nd AnnualConference on. [S.l.: s.n.], 2006. p. 1927 –1932. ISSN 1553-572X.
. A high step-up dc-dc converter based on three-state switching cell. In: IndustrialElectronics, 2006 IEEE International Symposium on. [S.l.: s.n.], 2006. v. 2, p. 998 –1003.
. A high step-up dc-dc converter based on three-state switching cell. In: IndustrialElectronics, 2006 IEEE International Symposium on. [S.l.: s.n.], 2006. v. 2, p. 998 –1003.
TROFINO, A. Controle Robusto. Florianopolis, SC, Brasil: Autoria propria, 2000. 153 p.Disponıvel em: <www.das.ufsc.br/ trofino/disciplinas/das-6600/apostila-robusto.pdf>.
TROFINO, A.; COUTINHO, D.; BARBOSA, K. A. Sistemas multivariaveis: Umaabordagem via LMIs. Versao preliminar. Florianopolis, SC, Brasil: Autoria propria, 2003.145 p. Disponıvel em: <www.das.ufsc.br/ trofino/disciplinas/das-6600/book.pdf>.
WANG, Z.; BURNHAM, K. J. Analysis and synthesis of robust control systems viaparameter-dependent lyapunov functions. Journal of optimization theory and applications,Kaiserslautern, Germany., v. 113, n. 2, p. 357–372, May. 2002.
ZANCHIN, V. T. Projeto de controlador para sistemas de potencia utilizando LMIs. 114 f.Dissertacao (Mestrado em Engenharia de Eletrica) — Universidade Federal do Rio Grande doSul - UFRGS, Porto Alegre, RS, 2003.

92
APENDICE A -- Introducao aos pacotes
computacionais SeDuMi e
Yalmip no MATLAB
A.1 Procedimento de Instalacao dos Pacotes SeDuMi e Yal-
mip
O Apendice A e baseado nos tutoriais sobre LMIs de Faria (), Oliveira e Peres (2010) e
trata de mostrar o uso e aplicacao desta ferramenta para controle via otimizacao por LMIs. Para
obtencao dos pacotes SeDuMi e Yalmip , basta acessar estes links: http://sedumi.ie.lehigh.edu/
para o SeDuMi e http://control.ee.ethz.ch/ joloef/wiki/pmwiki.php para Yalmip .
Apos o download destes pacotes, estes estao no formato compactado (ZIP). Portanto preci-
sam ser descompactados conforme Figura A.1.
Figura A.1: Descompactando pastas SeDuMi e Yalmip .
Apos descompactados, e sugerido que estas pastas estejam localizadas na pasta toolbox do
MATLAB como mostrado na Figura A.2.

A.1 Procedimento de Instalacao dos Pacotes SeDuMi e Yalmip 93
Figura A.2: Pasta do toolbox do MATLAB .
Em seguida, abra o programa MATLAB , va em File→ Set Path, como na Figura A.3.
Figura A.3: Instalacao dos pacotes SeDuMi e Yalmip no MATLAB .
Apos ter executado File→ Set Path, surgira uma janela conforme Figura A.4. Para confi-
gurar o Yalmip , clique em Add with Subfolders como na Figura A.5, procure a pasta Yalmip na
pasta toolbox dentro do programa MATLAB .
Feita esta etapa, procure a pasta yalmip, de acordo com a Figura A.5, clique em OK. A
Figura A.6 mostra o resultado dessa busca em que o pacote Yalmip e instalado com sucesso. O
mesmo procedimento e feito para o pacote SeDuMi , seguindo os mesmos passos da instalacao
do Yalmip no MATLAB . A figura Figura A.7 mostra o procedimento de teste de instalacao
do Yalmip . Escrevendo no prompt yalmiptest aparecera um extrato de pacotes instalados do

A.1 Procedimento de Instalacao dos Pacotes SeDuMi e Yalmip 94
Figura A.4: Configurando os pacotes SeDuMi e Yalmip no MATLAB .
Figura A.5: Instalando o pacote Yalmip no MATLAB .

A.2 Testando no MATLAB a estabilidade de Lyapunov via LMI 95
Figura A.6: Confirmando os pacotes SeDuMi e Yalmip no MATLAB .
SeDuMi no MATLAB , como mostrada na Figura A.8.
Figura A.7: Testando o pacote Yalmip no prompt do MATLAB .
A.2 Testando no MATLAB a estabilidade de Lyapunov via
LMI
A Secao A.2 visa mostrar as nocoes iniciais de programacao via LMIs. Dada a seguinte
matriz em (A.1):
A =
[0 1
−2 −3
]. (A.1)

A.2 Testando no MATLAB a estabilidade de Lyapunov via LMI 96
Figura A.8: Confirmacao do pacote Yalmip no prompt do MATLAB .
Deseja-se testar o criterio de estabilidade de Lyapunov do Teorema 2.1 via LMIs. O modelo de
otimizacao e com base em (2.13).
clear
clc
% Apendice
% Exemplo de aplicacao de estabilidade de Lyapunov via LMIs
A=[0 1;-2 -3]; % (A.1)
E=eig(A), %autovalores de A
% Inicializando a LMI
LMIs=set([ ]);
P=sdpvar(2,2,’symmetric’); % P e simetrica - P=P’
% Resolvendo as LMIs
LMIs=set(P>0)+set(A’*P+P*A < 0); %(2.13)
obj=trace(P);
sol = solvesdp(LMIs,obj,sdpsettings(’solver’,’sedumi’));
P=double(P), %resultado
% Verificando a convergencia das LMIs
checkset(LMIs)

A.2 Testando no MATLAB a estabilidade de Lyapunov via LMI 97
Alem disso, existe uma forma alternativa de estabilidade de Lyapunov que pode ser feita
com base no Teorema 2.1. Basta retirar o comando trace(P) como criterio de otimizacao
objetivo como mostrado no script.
clear
clc
% Apendice
% Exemplo de aplicacao de estabilidade de Lyapunov via LMIs
A=[0 1;-2 -3]; % (A.1)
E=eig(A), %autovalores de A
% Inicializando a LMI
LMIs=set([ ]);
P=sdpvar(2,2,’symmetric’); % P e simetrica - P=P’
% Resolvendo as LMIs
LMIs=set(P>0)+set(A’*P+P*A< 0); %(2.13)
sol = solvesdp(LMIs);
P=double(P), %resultado
% Verificando a convergencia das LMIS
checkset(LMIs)
Pode ser aplicada via programacao MATLAB o modelo em malha fechada via LMIs. Para
isso, basta seguir a mesma linha de raciocınio para programacao do script da desigualdade de
Lyapunov, usando o modelo controlado de (2.32). Dada a matriz
B =
[1
0
]. (A.2)
O script das LMIs do modelo em malha fechada do modelo no espaco de estados de (A.1) e
(A.2):

A.2 Testando no MATLAB a estabilidade de Lyapunov via LMI 98
clear
clc
% Apendice
% Exemplo de aplicacao de estabilidade de Lyapunov
% em malha fechada via LMIs
A=[0 1;-2 -3]; % (A.1)
B=[1; 0]; % (A.2)
E=eig(A), %autovalores de A
% Inicializando a LMI
LMIs=set([ ]);
P=sdpvar(2,2,’symmetric’); % P e simetrica - P=P’
Y=sdpvar(1,2,’full’); % Resolvendo as LMIs
LMIs=set(P>0)+set((A*P-B*Y) + (A*P-B*Y)’ < 0); % (2.32)
sol = solvesdp(LMIs);
P=double(P), %resultado 1
Y=double(Y), %resultado 2
K=Y*inv(P); %ganho de realimentacao de estados
Ec=eig(A-B*K), %autovalores em malha fechada
% Verificando a convergencia das LMIS
checkset(LMIs)
observa-se que os autovalores de Ec sao −1.3267±2.2243i.
O script seguinte mostra uma restricao de autovalores em h1 = −2 para a busca do ganho
de realimentacao de estados de (A.1) e (A.2). Para obter a estabilizacao com tal restricao, basta
programar as LMIs de acordo com (2.56).

A.2 Testando no MATLAB a estabilidade de Lyapunov via LMI 99
clear
clc
% Apendice % Exemplo de aplicacao de estabilidade de Lyapunov em malha fechada % com
restricoes via LMIs A=[0 1;-2 -3]; % (A.1)
B=[1; 0];
% (A.2) h1=-2; %restricao de autovalor
E=eig(A), %autovalores de A
% Inicializando a LMI
LMIs=set([ ]);
P=sdpvar(2,2,’symmetric’); % P e simetrica - P=P’
Y=sdpvar(1,2,’full’);
% Resolvendo as LMIs
LMIs=set(P>0)+set( -2*h1*P + (A*P-B*Y) + (A*P-B*Y)’ < 0); % (2.56)
sol = solvesdp(LMIs);
P=double(P), %resultado 1
Y=double(Y), %resultado 2
K=Y*inv(P); %ganho de realimentacao de estados
Ec=eig(A-B*K), %autovalores em malha fechada
% Verificando a convergencia das LMIS
checkset(LMIs)
Nota-se que a restricao h1 =−2 e atendida, isto por que os autovalores de Ec sao−2.5755±2.0327i, que e estabilizado via LMIs com restricoes.
Supondo que (A.1) tenha uma faixa de incertezas em que 2≤ δ1 ≤ 3 e −2≤ δ2 ≤−1, em
que
A =
[0 δ1
δ2 −3
]; B =
[1
0
]. (A.3)
Considera-se que a matriz A de (A.3) tenha o ponto de operacao desejado em (A.1) e e mantida
a restricao h1 =−2. O resultado do processo e obtido no script a seguir:

A.2 Testando no MATLAB a estabilidade de Lyapunov via LMI 100
clear
clc
% Apendice
% Exemplo de aplicacao de estabilidade de Lyapunov em malha fechada
com % incertezas politopicas
% com restricoes via LMIs
delta1=[2 3]; %politopo 1
delta2=[-2 -1]; %politopo 2
for i=1:2,
for j=1:2
A2*(i-1)+j=[0 delta1(i);delta2(j) -3]; % (A.3)
end,
end
B=[1; 0];
h1=-2; %restricao de autovalor
% Inicializando a LMI
LMIs=set([ ]);
P=sdpvar(2,2,’symmetric’); % P e simetrica - P=P’
Y=sdpvar(1,2,’full’); %
% Resolvendo as LMIs
for m=1:4
LMIs=set(P>0)+set( -2*h1*P + (Am*P-B*Y) + (Am*P-B*Y)’ < 0); %(2.56)
end
sol = solvesdp(LMIs);
P=double(P), %resultado 1
Y=double(Y), %resultado 2
A=double(A1); %modelo de referencia no ponto de operacao desejado
K=Y*inv(P); %ganho de realimentacao de estados
Ec=eig(A-B*K), %autovalores em malha fechada
% Verificando a convergencia das LMIS
checkset(LMIs)
Os autovalores com restricao politopica em Ec sao −2.6699±0.3618i.