
Consider the spring-mass damper F=F F k f system with the ...
12
8/26/2019 1 Fall 2019 Prof. Ç. Çetinkaya Chapter 2 Sections 2.1 – 2.2 Response to Harmonic Excitation 1 http://www.youtube.com/watch?v=UB9gA9Af5Tw&feature=related Section 2.1 Harmonic Excitation of Undamped Systems m k x F=F o cos t Consider the spring-mass damper system with the following applied (external) force: ω is the driving frequency (important note: this is not ω n ) F 0 is the magnitude of the applied force For simplicity, let us take c = 0 (no damping case) to start with. A Thought Experiment … () cos( ) o Ft F t 2 Equations of Motion: c = 0 () cos( ) p x t X t 0 2 0 0 0 () () cos( ) () () cos( ) where , n n mx t kxt F t xt xt f t F k f m m The total Solution is the sum of homogenous solution ( x h (t) ) and particular solution ( x p (t) ). Propose the particular solution has the form of the forcing function: F.B.D. 3 Total Solution = Homogeneous Solution + Particular Solution Substitute Particular Solution into EoM: 2 2 2 2 2 0 0 0 2 2 cos cos cos Solving this equation for yields the amplitude: p n p x x n n n X t X t f t X X f f X X Thus, the particular solution has the following form: 0 2 2 () cos( ) p n f x t t 4 () cos( ) p x t X t Plug the particular soln (x p (t)) in the EoM to test if it works. And if it does, determine its amplitude, X = ? : 2 0 () () cos( ) n xt xt f t
Transcript of Consider the spring-mass damper F=F F k f system with the ...

8/26/2019
1
Fall 2019
Prof. Ç. Çetinkaya
Chapter 2 Sections 2.1 – 2.2
Response to Harmonic Excitation
1
http://www.youtube.com/watch?v=UB9gA9Af5Tw&feature=related
Section 2.1 Harmonic Excitation of Undamped Systems
m k
x
F=Fo cost Consider the spring-mass damper
system with the following applied
(external) force:
ω is the driving frequency (important
note: this is not ωn)
F0 is the magnitude of the applied force
For simplicity, let us take c = 0 (no
damping case) to start with.
A Thought Experiment …
( ) cos( )oF t F t
2
Equations of Motion: c = 0
( ) cos( )px t X t
0
2
0
00
( ) ( ) cos( )
( ) ( ) cos( )
where ,
n
n
mx t k x t F t
x t x t f t
F kf
m m
The total Solution is the sum of homogenous solution ( xh(t) ) and
particular solution ( xp(t) ).
Propose the particular solution has the form of the forcing function:
F.B.D.
3
Total Solution = Homogeneous Solution + Particular Solution
Substitute Particular Solution into EoM:
2
2 2 2 2
0 0
0
2 2
cos cos cos
Solving this equation for yields the amplitude:
p n px x
n n
n
X t X t f t X X f
fX X
Thus, the particular solution has
the following form:
0
2 2( ) cos( )p
n
fx t t
4
( ) cos( )px t X t
Plug the particular soln (xp(t)) in the EoM to test if it works. And if it does,
determine its amplitude, X = ? :
2
0( ) ( ) cos( )nx t x t f t

8/26/2019
2
Total Solution Total Solution = Homogeneous Solution + Particular Solution
solution ( ( ))
01 2 2 2
homogeneous solution ( ( ))
( ) ( ) + ( )
( ) sin cos cos
p
h
h p
particular x t
n n
nx t
x t x t x t
fx t A t A t t
1 2 and are constants of integration. These constants for ( ) will be
determined from the I.C at = 0.
A A x t
t
Remark:
5
1 2
1 2
( ) sin( )
( ) sin cos
( ) n n
h n
h n n
j t j t
h
x t A t
x t A t A t
x t a e a e
Equivalent forms of homogenous solutions
n
k
m
0 0 01 2 2 0 2 02 2 2 2 2 2
(0) sin 0 cos0 cos0n n n
f f fx A A A x A x
Apply the I.C. to Determine A1 and A2
0 01 2 1 0 12 2
(0) cos0 sin 0 sin 0 n n n n
n n
f vx A A A v A
0 0 00 2 2 2 2
( ) sin cos cosn n
n n n
v f fx t t x t t
6
The general solution with the I.C. becomes:
1 2 2 2
homogeneous
( ) sin cos cos
particular
on n
n
fx t A t A t t
0
0
(0)
(0)
x x
x v
Comparison of Free and Forced Responses
Observations:
•Sum of two harmonic terms of different frequencies.
•Free response has amplitude and phase effected by forcing function (fo).
•Our solution is not defined for n = since it results in division by 0.
• If/when forcing frequency is close to natural frequency, the amplitude of
particular solution grows very large (singularity).
7
( )px t
Response for m = 100 kg, k = 1000 N/m, F = 100 N, = n + 5, v0=0.1m/s
and x0= -0.02 m.
Observe: The obvious presence of two harmonic signals
0 2 4 6 8 10 -0.05
0
0.05
Time (sec)
Dis
pla
ce
me
nt
(x)
Example: Time vs. Displacement Plot
8
0 0 00 2 2 2 2
( ) sin cos cosn n
n n n
v f fx t t x t t
1000 N/m3.16 rad/s 5 8.16 rad/s, 1
100 kgn n o
k Ff N kg
m m

8/26/2019
3
Example 2.1.1 Given for m = 10 kg, k = 1000 N/m, x0 = 0, v0 = 0.2 m/s, Fo = 23 N,
= 2 n.
Determine and plot the system’s response to this harmonic force
excitation.
9
m k
x
F=Fo cost
Example 2.1.1: Solution
00
0
2 2 2 2 2 2
1000 N/m10 rad/s 2 20 rad/s
10 kg
23 N 0.2 m/s2.3 N/kg 0.02 m
10 kg 10 rad/s
2.3 N/kg0.0076m
(10 20 ) rad / s
( ) 0.02sin10 0.0076(cos10 cos 20 )
n n
o
n
n
k
m
F vf
m
f
x t t t t
Compute and plot the response
m=10 kg, k=1000 N/m, x0=0, v0=0.2 m/s, Fo=23 N, =2n
10
0 0 00 2 2 2 2
( ) sin cos cosn n
n n n
v f fx t t x t t
Total solution:
Calculate parameters:
Plug these parameters into the total solution:
Example 2.1.1: Solution Compute and plot the response
( ) 0.02sin10 0.0076(cos10 cos 20 )x t t t t
11
time (sec)
x(t)
Example 2.1.2 Given zero initial conditions, a harmonic input of 10 Hz with 20 N magnitude
and k= 2000 N/m, and a measured response amplitude of 0.1 m, extract the
mass (m) of the system.
12
0
2 2cos cos n
n
ft t
0 0 00 2 2 2 2
( ) sin cos cosn n
n n n
v f fx t t x t t
Total Solution:
m k
x
F=Fo cost

8/26/2019
4
Example 2.1.2: Solution
0
2 2
0
2 2
0
2 2
0.1 m
0
2 22
( ) cos cos
cos 20 cos
2( ) sin sin
2 2
202
20.1 0.1 0.405 kg
2000(2 10)
n
n
n
n
n n
n
n
fx t t t
ft t
fx t t t
f m m
m
I.C.: at rest at t = 0
f =10 Hz with Fo=20 N
k= 2000 N/m
A max= 0.1m
m=? kg
13
This is not amplitude of x(t)
0oF
fm
Amplitude of x(t)
When the drive frequency
and natural frequency are
the same ( =n), the
amplitude of the vibration
grows with no bounds.
This is known as a
resonance condition.
( ) sin( )px t t X t
0 5 10 15 20 25 30 -5
0
5
Time (sec)
Dis
pla
ce
me
nt (x
)
grows without bound
01 2( ) sin cos sin( )
2
fx t A t A t t t
14
Form of the particular solution is:
The total solution becomes:
When =n, What is the Response?
0Substituting this into the EoM and solving for yields: 2
fX X
What Occurs When is Near n?
0
2 2
0
2 2
( ) cos cos
2sin sin
2 2
n
n
n n
n
fx t t t
ft t
Consider the simplified case, namely x(0) = v(0) = 0 (from rest)
0 0 00 2 2 2 2
( ) sin cos cosn n
n n n
v f fx t t x t t
15
General Solution:
Apply the zero initial conditions to obtain: Using the trig identify (sum-to-
product)
http://www.youtube.com/watch?v=5hxQDAmdNWE
0 5 10 15 20 25 30 -1
-0.5
0
0.5
1
Time (sec)
Dis
pla
ce
me
nt
(x)
sin when is small. Namely, the period is large. 2
nnt T
16
0
2 2
2( ) sin sin
2 2
n n
n
fx t t t
1T
What Occurs When is Near n?
8/26/2019
5
0 5 10 15 20 25 30 -1
-0.5
0
0.5
1
Time (sec)
Dis
pla
ce
me
nt
(x)
0
2 2
2( ) sin sin
2 2
n n
n
fx t t t
17
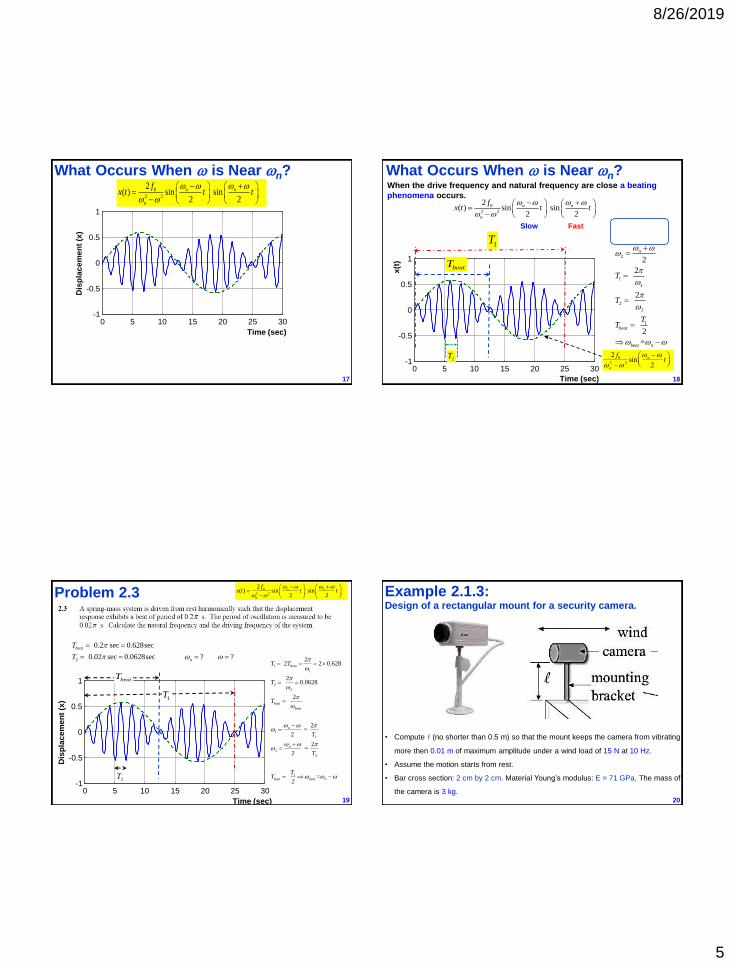
What Occurs When is Near n?
1T
When the drive frequency and natural frequency are close a beating
phenomena occurs.
0 5 10 15 20 25 30 -1
-0.5
0
0.5
1
Time (sec)
x(t
)
2 f0
n
2 2sin
n
2t
0
2 2
2( ) sin sin
2 2
n n
n
fx t t t
18
1
2
1
1
2
2
1
2
2
2
2
2
=
n
n
beat
beat n
T
T
TT
2T
beatT
What Occurs When is Near n?
Slow Fast
0 5 10 15 20 25 30 -1
-0.5
0
0.5
1
Time (sec)
Dis
pla
ce
me
nt
(x)
19
1T
2T
2
0.2 sec 0.628sec
0.02 sec 0.0628sec ? ?
beat
n
T
T
Problem 2.3
beatT
0
2 2
2( ) sin sin
2 2
n n
n
fx t t t
1
1
2
2
1
1
2
2
1
2 2 2 0.628
2 0.0628
2
2 =
2
2 =
2
=2
beat
beat
beat
n
n
beat beat n
T T
T
T
T
T
TT
Example 2.1.3:
• Compute l (no shorter than 0.5 m) so that the mount keeps the camera from vibrating
more then 0.01 m of maximum amplitude under a wind load of 15 N at 10 Hz.
• Assume the motion starts from rest.
• Bar cross section: 2 cm by 2 cm. Material Young’s modulus: E = 71 GPa. The mass of
the camera is 3 kg.
Design of a rectangular mount for a security camera.
20

8/26/2019
6
Example 2.1.3: Solution/Modeling
21
Example 2.1.3: Solution
03
3( ) cos
EIm x x t F t
From the strength of materials (beam bending):
3
12
bhI
Thus, the frequency expression becomes:
3 32
3 3
3
12 4n
E b h E b h
m m
Modeling the mount and camera as a beam with a tip mass,
and the wind as harmonic, the equation of motion becomes:
22
l = ?, lmin = 0.5 m
A max = 0.01 m
Fo = 15 N
f = 10 Hz
m = 3 kg
Cross-section: 2 by 2 cm
E = 71 GPa
2
3
3since and n
EI kk
l m
23
0
2 2
0
2 2
( ) cos cos
2sin sin
2 2
n
n
n n
n
fx t t t
ft t
0 0 00 2 2 2 2
( ) sin cos cosn n
n n n
v f fx t t x t t
Example 2.1.3: Solution Total Solution:
Task: Compute l, making the amplitude less than 1 cm
0 0
2 2 2 2
2 20.01 0.01 0.01
n n
f f
32
34n
E b h
m
Amplitude of x(t)
Case A:
0 0 0
2 2 2 2 2 2
32 2 2
0 0 3
33
2
0
2 2 20.01 0.01
0.01( ) 2 0.01 2 0.014
0.01 0.321 0.685 m4 (0.01 2 )
n n n
n
f f f
Ebhf f
m
Ebh
m f
Example 2.1.3: Solution
24
2 2For 0 namely, n n
Here we are interested computing l that will make the amplitude less
than 0.01 m =1 cm: 2 20
2 2
0 0
2 2 2 22 20
2 2
2Case A 0.01 0, for 0
2 20.01 0.01 0.01
2Case B 0 < 0.01, for 0
n
n
n nn
n
f
f f
f
l = ?, lmin = 0.5 m
A max = 0.01 m
Fo = 15 N
f = 10 Hz = 2π f
m = 3 kg
Cross-section: 2 by 2 cm
E = 71 GPa
32
34n
E bh
m

8/26/2019
7
Case B:
32 2 20
0 02 2 3
33
2
0
20.01 2 0.01( ) 2 0.01 0.01
4
0.01 0.191 0.576 m4 (2 0.01 )
n
n
f Ebhf f
m
Ebh
m f
Example 2.1.3: Solution
25
2 2For 0 namely, n n
l = ?, lmin = 0.5 m
A max = 0.01 m
Fo = 15 N
f = 10 Hz = 2π f
m = 3 kg
Cross-section: 2 by 2 cm
E = 71 GPa
32
34n
E bh
m
Constraint: The length must be at least 0.5 m, (A) and (B) yield:
> 0.685 m (Case A) or 0.5 0.576 (Case B)
Case A:
0
2 2
20.01 0.685 m
n
f
Constraint: the length must be at least 0.5 m, (A) and (B) yield:
> 0.685 m (Case A) or 0.5 0.576 (Case B)
It is desirable that the resonance freq is higher than the excitation freq (also less material is usually desirable), so choose Case B, say l = 0.55 m. To
check the resonance frequency is higher than the excitation frequency, note that for l = 0.55:
3
22 2
3
320 1742 0
12n
Ebh
m
Thus, Case B condition is satisfied. Next check the mass of the designed beam
if low. This is to make certain that it does not affect the frequency:
Observation: It is much less then the camera mass m = 3kg, thus it is (border
line) negligible.
2700 0.55 0.02 0.02 0.59 kgbeamm b h
Example 2.1.3: Design Considerations
26
2
0 0( ) ( ) sin or ( ) ( ) sin nm x t k x t F t x t x t f t
The particular solution then becomes a sine: ( ) sin px t X t
Substitution of this solution into the EoM
above yields, the particular solution:
0
2 2( ) sinp
n
fx t t
Solving for the homogenous solution and evaluating the constants
yields the total solution for this type of excitation as:
0 0 00 2 2 2 2
( ) cos sin sin n n
n n n n
v f fx t x t t t
External Excitation: F(t) = sin( t)
27
Section 2.2 Harmonic Excitation of Damped Systems
28
• Harmonically excited systems with damping, c ≠ 0
• Extending resonance and response calculation to damped
systems
8/26/2019
8
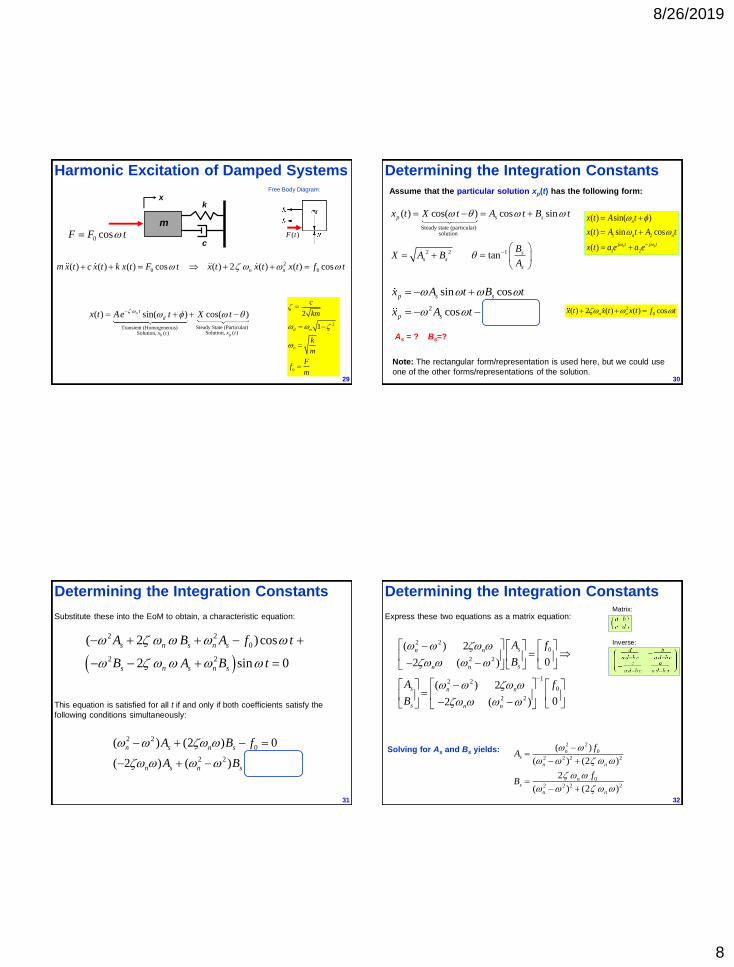
Harmonic Excitation of Damped Systems
2
0 0( ) ( ) ( ) cos ( ) 2 ( ) ( ) cosn nm x t c x t k x t F t x t x t x t f t
m
k x
c
29
Steady State (Particular) Transient (Homogeneous) Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
2
2
1 d n
n
o
c=
km
k
m
Ff
m
0 cosF F t
Free Body Diagram:
( )F tSteady state (particular) solution
2 2 1
( ) cos( ) cos sin
tan
p s s
ss s
s
x t X t A t B t
BX A B
A
Assume that the particular solution xp(t) has the following form:
Note: The rectangular form/representation is used here, but we could use
one of the other forms/representations of the solution.
Determining the Integration Constants
2 2
sin cos
cos sin
p s s
p s s
x A t B t
x A t B t
30
1 2
1 2
( ) sin( )
( ) sin cos
( ) n n
n
n n
j t j t
x t A t
x t A t A t
x t a e a e
2
0( ) 2 ( ) ( ) cosn nx t x t x t f t
As = ? Bs=?
2 2
0
2 2
( ) (2 ) 0
( 2 ) ( ) 0
n s n s
n s n s
A B f
A B
Substitute these into the EoM to obtain, a characteristic equation:
2 2
0
2 2
( 2 )cos
2 sin 0
s n s n s
s n s n s
A B A f t
B A B t
31
This equation is satisfied for all t if and only if both coefficients satisfy the
following conditions simultaneously:
Determining the Integration Constants
Express these two equations as a matrix equation:
2 20
2 2
12 2
0
2 2
( ) 2
02 ( )
( ) 2
02 ( )
sn n
sn n
s n n
s n n
A f
B
A f
B
2 2
0
2 2 2 2
0
2 2 2 2
( )
( ) (2 )
2
( ) (2 )
ns
n n
ns
n n
fA
fB
Solving for As and Bs yields:
32
Inverse:
Matrix:
Determining the Integration Constants
8/26/2019
9
10
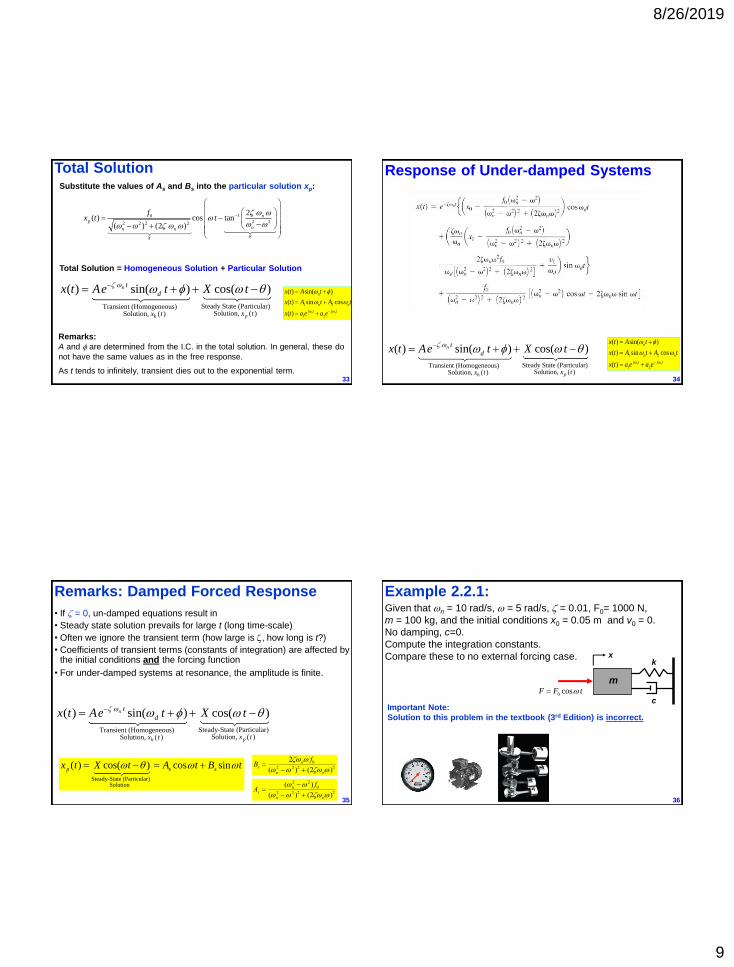
2 22 2 2 2
2( ) cos tan
( ) (2 )
np
nn n
X
fx t t
Substitute the values of As and Bs into the particular solution xp:
Total Solution = Homogeneous Solution + Particular Solution
Remarks:
A and are determined from the I.C. in the total solution. In general, these do
not have the same values as in the free response.
As t tends to infinitely, transient dies out to the exponential term.
Total Solution
33
1 2
1 2
( ) sin( )
( ) sin cos
( ) n n
n
n n
j t j t
x t A t
x t A t A t
x t a e a e
Steady State (Particular) Transient (Homogeneous)
Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
34
1 2
1 2
( ) sin( )
( ) sin cos
( ) n n
n
n n
j t j t
x t A t
x t A t A t
x t a e a e
Response of Under-damped Systems
Steady State (Particular) Transient (Homogeneous) Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
Remarks: Damped Forced Response
• If = 0, un-damped equations result in
• Steady state solution prevails for large t (long time-scale)
• Often we ignore the transient term (how large is , how long is t?)
• Coefficients of transient terms (constants of integration) are affected by the initial conditions and the forcing function
• For under-damped systems at resonance, the amplitude is finite.
35
As (n
2 2 ) f0
(n
2 2 )2 (2n )2
Bs 2n f0
(n
2 2 )2 (2n )2
Steady-State (Particular) Solution
( ) cos( ) cos sinp s sx t X t A t B t
Steady-State (Particular) Transient (Homogeneous) Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
Example 2.2.1:
Given that n = 10 rad/s, = 5 rad/s, = 0.01, F0= 1000 N,
m = 100 kg, and the initial conditions x0 = 0.05 m and v0 = 0.
No damping, c=0.
Compute the integration constants.
Compare these to no external forcing case.
36
Important Note:
Solution to this problem in the textbook (3rd Edition) is incorrect.
0 cosF F t
m
k x
c

8/26/2019
10
Example 2.2.1: Solution
2
0.1
0.133 0.013 0.1
1 9.99 / sec
( ) sin(9.99 ) 0.133cos(5 0.013)
n
d n
t
X m rad
rad
x t Ae t t
Using these equations:
n = 10 rad/s, = 5 rad/s, = 0.01, F0= 1000 N, m = 100 kg
I.C. x0 = 0.05 m and v0 = 0. No damping: c=0.
10
2 22 2 2 2
2( ) cos( tan )
( ) (2 )
np
nn n
X
fx t t
( ) sin( )nt
h dx t Ae t
37
Example 2.2.1: Solution
0.1 0.1( ) 0.1 sin(9.99 ) 9.99 cos(9.99 ) 0.665sin(5 0.013)t tx t Ae t Ae t t
Differentiating x(t) yields:
(0) 0.05 sin 0.133cos( 0.013)
(0) 0 0.01 sin 9.999 cos 0.665sin 0.013
x A
v A A
0.1( ) sin(9.99 ) 0.133cos(5 0.013)tx t Ae t t
Applying the ICs, (0) = 0.05m, (0) 0 and solving these two equations
for and results in:
0.519
0.875
x x
A
A m
rad
38
?
?
A
39
Problem 2.30: Solution Hints
2
0.05
oI m l
a m
sF cF
θ
0
2
0
( ) ( ) ( ) cos
( ) 2 ( ) ( ) cosn n
m x t c x t k x t F t
x t x t x t f t
x ↔ θ
O o
On Ignoring the Transient Response
• Always check to make sure the transient (particular solution) is
insignificant for the problem/application at hand;
• Compare transient amplitude to that of homogenous solution;
• For example, transients are very important in earthquakes;
• In many machine design applications, transients may be ignored.
40

8/26/2019
11
Static Displacement
41
0F
m
k
x
c
0
00
FF k x x
k
0
Magnitude:
Non dimensional
form of disp.:
Frequency ratio:
0
2 2 2 2 2 2 2 20
1
( ) (2 ) ( ) (2 )n n n n
f XX
f
2
2 2 2 20 0 02
2 2 2 2 2 2 2
2 2
1
1( ) (2 )
1 1
( ) (2 ) (1 ) (2 )
n
n n
n
n n
n n
dynamic X X k X
static F k m f f
r r
n
n
kr
m
Steady-State Solution (Response): t → ∞
42
12
2 tan
12
c rrk m
Damping ratio:
Steady-State (Particular) Transient (Homogeneous) Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
00
0
F
F k x xk
Magnitude Plot: Steady-State Response
0 0.5 1 1.5 2 -1
-.05
0
0.5
1
1.5
2
r
=0.01
=0.1
=0.3
=0.5
=1
• Resonance is close to r = 1
• For = 0, r =1 defines
resonance
• As grows resonance
moves r <1, and X decreases
• The exact value of r can be
found from maximizing the
magnitude.
43
r
n
2 2 20
dynamic displacement 1
static displacement (1 ) (2 )
X
F k r r
0
log( )X
F k
Steady State (Particular) Transient (Homogeneous) Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
log(1) 0
0
log( 1) 0X
F k
• Resonance occurs at = /2
• The phase changes more rapidly
when the damping is small
• From low to high values of r the
phase always changes by 1800 or
radians
0 0.5 1 1.5 2 0
0.5
1
1.5
2
2.5
3
3.5
r
Ph
as
e (ra
d)
=0.01
=0.1
=0.3
=0.5
=1
12
2tan1
rr
Phase Plot: Steady State Response
44
/2
r
n
Steady State (Particular) Transient (Homogeneous) Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
8/26/2019
12
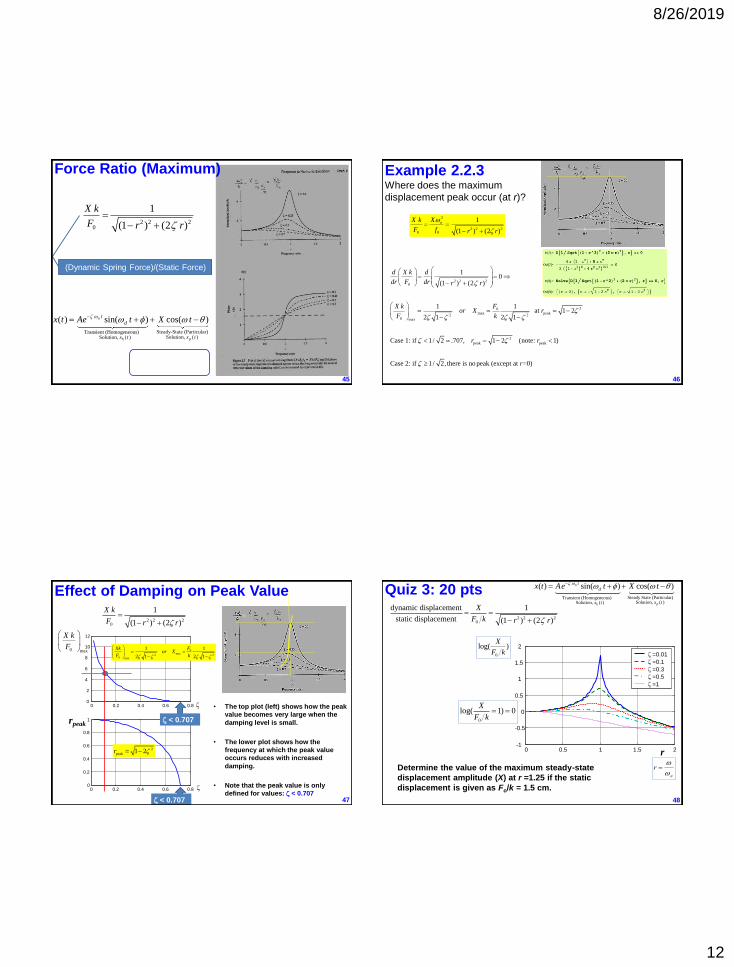
45
12
2tan
1r
r
2 2 20
1
(1 ) (2 )
X k
F r r
(Dynamic Spring Force)/(Static Force)
Force Ratio (Maximum)
Steady-State (Particular) Transient (Homogeneous) Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
2 2 20
20max peak
2 20 max
2
peak peak
10
(1 ) (2 )
1 1 at 1 2
2 1 2 1
Case 1: if 1 / 2 .707, 1 2 (note: 1)
Case 2: if 1 / 2, there is no peak (except at =0)
d X k d
dr F dr r r
X k For X r
F k
r r
r
Example 2.2.3 Where does the maximum
displacement peak occur (at r)?
46
2
2 2 20 0
1
(1 ) (2 )
nX k X
F f r r
Effect of Damping on Peak Value
0 0.2 0.4 0.6 0.8 0
2
4
6
8
10
12
0 0.2 0.4 0.6 0.8 0
0.2
0.4
0.6
0.8
1
rpeak
0 max
X k
F
• The top plot (left) shows how the peak
value becomes very large when the
damping level is small.
• The lower plot shows how the
frequency at which the peak value
occurs reduces with increased
damping.
• Note that the peak value is only
defined for values: < 0.707 47
2 2 20
1
(1 ) (2 )
X k
F r r
< 0.707
< 0.707
0max
2 20 max
1 1
2 1 2 1
FXkor X
F k
2
peak 1 2r
Quiz 3: 20 pts
0 0.5 1 1.5 2 -1
-0.5
0
0.5
1
1.5
2
r
=0.01
=0.1
=0.3
=0.5
=1
Determine the value of the maximum steady-state
displacement amplitude (X) at r =1.25 if the static
displacement is given as Fo/k = 1.5 cm.
48
r
n
2 2 20
dynamic displacement 1
static displacement (1 ) (2 )
X
F k r r
0
log( )X
F k
Steady State (Particular) Transient (Homogeneous) Solution, ( ) Solution, ( )
( ) sin( ) cos( )n
ph
t
d
x tx t
x t Ae t X t
0
log( 1) 0X
F k


















