Computacion aplicada cp23 robalino sanipatin
39
-
Upload
mechita-sanipatin -
Category
Documents
-
view
148 -
download
2
Transcript of Computacion aplicada cp23 robalino sanipatin

El análisis Tiempo-Historia, es un análisis paso a paso de larespuesta dinámica de una estructura a una carga especificada quepuede variar con el tiempo. El análisis puede ser lineal o no lineal.
Nos vamos a enfocar al Análisis No lineal.
Temas avanzados
• Descripción general• No linealidad• Carga• Condiciones iniciales• Pasos Tiempo• Análisis modal no lineal Tiempo-Historia (FNA)• Análisis directa-Integración no lineal Tiempo-Historia.
Análisis no lineal Tiempo-Historia
Descripción general
El análisis Tiempo Historia se utiliza para determinar la respuesta
dinámica de la estructura a la carga arbitraria. Las ecuaciones de
equilibrio dinámico a resolver están dados por:
donde
K: Es la matriz de rigidez;
C: Es la matriz de amortiguamiento; M es la matriz de masa
diagonal;
u, ú y ü: Son los desplazamientos, velocidades y aceleraciones de
la estructura
r: Es la carga aplicada. Si la carga incluye aceleración del
terreno, los desplazamientos, velocidades y aceleraciones son
relativos a este movimiento del suelo.
Hay varias opciones que determinan el tipo de su análisis Tiempo-Historia de a realizar:
- Lineal vs no lineal.
Modal vs Integración directa.- Se trata de dos métodos de solución diferentes, cada uno con ventajas y desventajas. En circunstancias ideales, los dos métodos debe producir los mismos resultados para un problema dado.
- Transitorio vs Periódico: Análisis transitorio considera la carga aplicada como una evento único, con un principio y un final. El análisis periódico considera la carga repitiéndose indefinidamente, con todas las respuestas transitorias con amortiguamiento.
En un análisis no lineal, la rigidez, la amortiguación, y carga entodo puede depender de la desplazamientos, velocidades y tiempo.Esto requiere una solución iterativa para las ecuaciones demovimiento.
No linealidad
Los siguientes tipos de no linealidad están disponibles en SAP2000:
• No linealidad del Material
- Diferentes tipos de propiedades no lineales de elementos de
unión / Soporte
- La tensión y / o límites de compresión en los elementos Frame.
Articulaciones plásticas en los elementos FRAME
• La no linealidad geométrica
- Efectos P-delta
- Los efectos gran desplazamiento
Para los análisis Tiempo-Historia no lineal modal, sólo el
comportamiento no lineal de los elementos de enlace /
Soporte está incluido. Si los modos utilizados para este
análisis se calcularon utilizando la rigidez del extremo de
un análisis no lineal, todos los otros tipos de linealidades
están encerrados en el estado que tenían en el extremo de
que el análisis no lineal.
Carga.-
La aplicación de la carga no lineal para el análisis Tiempo-
Historia es idéntico al utilizado para el análisis lineal
Tiempo-Historia.

Condiciones iniciales
Las condiciones iniciales describen el estado de la estructura al comienzo de untiempo-historia del caso. Estos incluiyen:• Desplazamientos y velocidades• Las fuerzas internas y tensiones• Variables de estado internas de elementos no lineales• Los valores de energía para la estructura• Las cargas externas
Las aceleraciones no se consideran las condicionesiniciales, pero se calcula a partir de laecuación de equilibrio.

Para análisis no lineales puede especificar las condicionesiniciales al comienzo de laanálisis. Usted tiene dos opciones:
Condiciones iniciales nulas: la estructura ha cerodesplazamiento y velocidad, todos los elementos estánsin tensión, y no hay ninguna suceso de deformación nolineal.
Continúe desde un previo análisis no lineal: los desplazamientos, velocidades,tensiones, cargas, energías, y los estados de sucesos no lineales, se llevan a cabo a partir del final de un análisis previo.

Hay algunas restricciones cuando continúan de un caso nolineal anterior.
Casos no lineales estáticos y de integración directa pueden serrelacionados en cualquier combinación, es decir, los dos tiposde análisis son compatibles el uno con el otro.
Los casos Modales Tiempo-Historia sólo puede continuardesde otros casos FNA, que utilizan modos de análisis modaldel mismo caso.
Cuando se continúa desde casos anteriores, todas las cargasaplicadas especificada para el presente análisis de casos sonincrementales, es decir, que se añaden a las cargas que actúanal preparado en el extremo del caso anterior.
Historia del Análisis Modal no lineal (FNA)
El método de análisis No lineal Tiempo Historia esutilizado en SAP2000 es una extensión de el rápidoanálisis no lineal (FNA) método desarrollado por Wilson(Ibrahimbegovic y Wilson, 1989; Wilson, 1993). Elmétodo es extremadamente eficiente y está diseñado paraser utilizado para los sistemas estructurales que sonprincipalmente elásticos lineales, peroque tienen un número limitado de elementos predefinidos no lineales. Para el método FNA, todo se vuelveno lineal y restringidos.
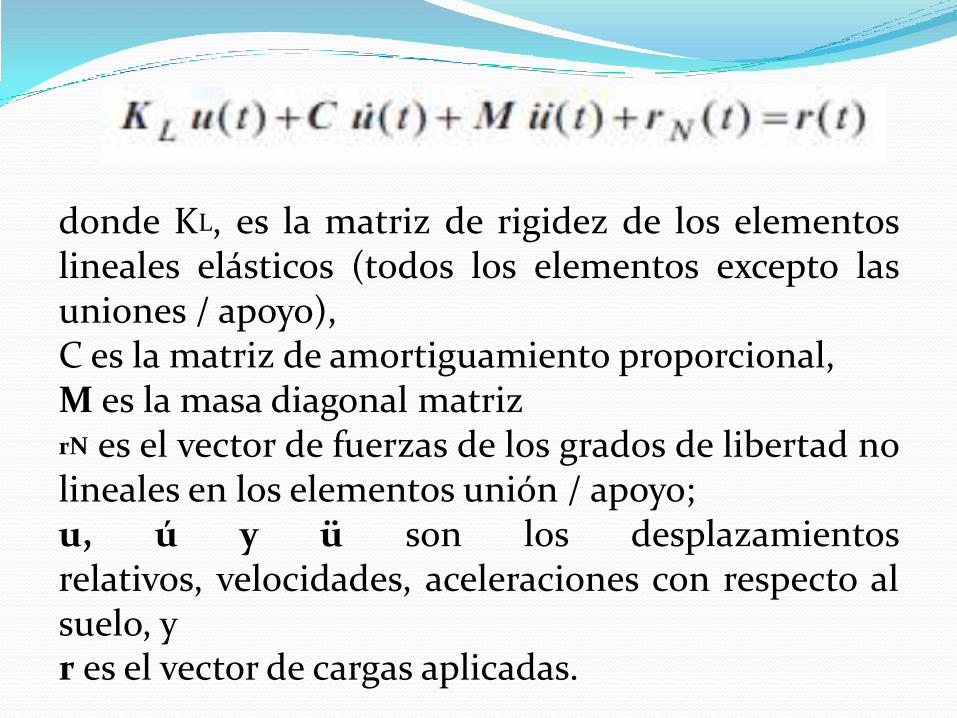
donde KL, es la matriz de rigidez de los elementoslineales elásticos (todos los elementos excepto lasuniones / apoyo),C es la matriz de amortiguamiento proporcional,M es la masa diagonal matrizrN es el vector de fuerzas de los grados de libertad nolineales en los elementos unión / apoyo;u, ú y ü son los desplazamientosrelativos, velocidades, aceleraciones con respecto alsuelo, yr es el vector de cargas aplicadas.

Unión / Apoyo rigidez efectiva
Para los fines del análisis, una rigidez efectiva lineal se definepara cada grado de libertad de los elementos no lineales. Larigidez efectiva en los grados de libertad no lineales esarbitraria, pero generalmente varía entre cero y la máximarigidez no lineal de ese grado de libertad.La ecuación de equilibrio, entonces se puede reescribir como:

Amortiguamiento modal
El amortiguamiento modal se define como el cocientede amortiguamiento crítico para cada modo. Elamortiguamiento crítico es la menor cantidad deamortiguamiento que produce que un sistema vuelva asu posición de equilibrio sin oscilar.La amortiguación de la estructura se modela utilizandoamortiguamiento modal desacoplado. Cada modotiene un factor de amortiguamiento, que se mide comouna fracción del amortiguamiento crítico
Casos de Análisis del Amortiguamiento Modal
Constanteparatodoslosmodos
Se especifica el factor de amortiguamiento en una serie
de puntos de frecuencia o período. Entre los puntos
específicos de la amortiguación se interpola
linealmente. Fuera del rango especificado, el coeficiente de
amortiguamiento es constante en el valor dado por
el punto más cercano especificado
Masa y la rigidezproporcional.Esto imita laamortiguaciónproporcionalutilizado para laintegracióndirecta, exceptoque el valor deamortiguaciónno se le permiteexceder a launidad.
La rigidez inicial del elemento de ser utilizadocomo la rigidez efectiva o la rigidez secante queson obtenidos de ensayos en el valor esperado deldesplazamiento máximo utilizarse. Inicialmente alabrir espacios y gancho en los elementos y todoslos elementos amortiguadores en general seespecifican con rigidez efectiva cero .
Se recomienda
La suposición de amortiguamiento modal se realiza conrespecto a la matriz de rigidez total, K, que incluye la rigidezefectiva de los elementos no lineales. Si el amortiguamientomodal no es cero se utilizará, la rigidez efectiva especifica paraestos elementos . La rigidez efectiva se debe seleccionar de talmanera que los modos para los cuales los valores reales deamortiguación se encuentren especificados.
Si hay relaciones modales de amortiguamiento, quehan sido especificadas para los materiales seconvierten automáticamente a compuestos deamortiguamiento modal. Cualquier acoplamientocruzado entre los modos se ignora. Estos valores deamortiguación modal-será generalmente diferentepara cada modo, dependiendo de la cantidad dedeformación en cada modo esto hace que loselementos compuestos de los materiales seandiferentes.
Amortiguación modal compuestos de los Materiales
Las ecuaciones no lineales modales se resuelven iterativamenteen cada paso de tiempo. El programa supone que los ladosderechos de las ecuaciones varían linealmente durante unintervalo de tiempo, de forma cerrada para resolver estasecuaciones de integración en cada iteración. Las iteraciones sellevan a cabo hasta que converge la solución. Si la convergenciano puede ser alcanzada, el programa divide el paso de tiempo enpequeños pasos secundarios y lo intenta de nuevo.
El uso de los valores por defecto se recomienda ya que esto va aresolver la mayoría de los problemas. Si la convergencia no puedeser alcanzada, se obtienen resultados imprecisos, o la soluciónllevará demasiado tiempo, el cambio de estos parámetros decontrol puede ayudar. Sin embargo, primero debe verificar quelas cargas razonables y vínculos apropiados se hanespecificado, y que los modos apropiados han sidoobtenidos, utilizando preferentemente el método de vectoresRitz.
Solución Iterativa.

1. La fuerza de tolerancia relativa de conversión, ftol
2. La energía de tolerancia relativa de conversión, Etol
3. El máximo tamaño permitido subetapa, dtmax
4. El tamaño mínimo permitido de la subetapa, dtmin
5. El número máximo de iteraciones permitidas por la fuerza subpasos pequeños itmax
6. El número máximo de iteraciones permitidas por la fuerza subpasos grandes, itmin
7. El factor de convergencia, cf
Los parámetros que están disponibles para el control de la iteración paso a paso son:
Verificación de la Fuerza de Convergencia
Cada paso de tiempo dt de longitud se divide ensubetapas como sea necesario para lograr laconvergencia. En cada subetapa, la solución se iterahasta que el cambio en el lado derecho de lasecuaciones modales, expresado como una fracción dela parte derecha, se hace menor que la fuerza detolerancia, ftol. Si esto no se produce en el número deiteraciones por cometidos, el tamaño de la subetapa seredujo a la mitad y la iteración se intentó de nuevo.
El valor por defecto es ftol 10^-5. Debe satisfacer ftol>0.

Comprobación de la Energía de convergencia
Si la convergencia fuerza se produce en el númeropermitido de iteraciones, el trabajo realizado por lasfuerzas no lineales se compara con el trabajo realizadopor todos los términos de otra fuerza en las ecuacionesde equilibrio modal. Si la diferencia, expresada comouna fracción del trabajo total realizado, es mayor quela energía de tolerancia relativa, etol, el tamaño de lasubetapa se redujo a la mitad y la iteración se intentade nuevo.
Esta comprobación lineal de energía esencialmente mide cuán cerca es la variación de la fuerza lineal sobre el paso del tiempo.
Es particularmente útil para detectar cambios repentinos en el comportamiento no lineal, tales como la apertura y cierre de los ganchos o la aparición de la fluencia o deslizamiento. Establecer etol mayor que la unidad hace que esta comprobación de energía se apague.
El valor por defecto es etol 10^-5. Debe satisfacer etol > 0.
Máximas y Mínimas Tamaños subetapas Si la subetapa cumple los criterios de convergencia tanto de la fuerza
y energía, los resultados de la subetapa son aceptadas, por consiguiente se intenta utilizar el doble de la longitud de la subetapa anterior. El tamaño de la subetapa nunca se incrementa más allá dtmax
Cuando el tamaño de la subetapa se redujo a la mitad a causa de incumplimiento de cualquiera de los dos criterios de la fuerza o energía de convergencia, el tamaño de la subetapa resultante nunca se encuentra a menos de dtmin.
si el tamaño de la subetapa no es ya dtmin el resultado de los pasos de tiempo restante se ponen a cero y un mensaje de advertencia se emite.
El valor por defecto dtmax es dt. El valor por defecto dtmin es dtmax· 10^-9. Deben cumplir 0 < dtmin dtmax dt.
Número máximo de iteraciones
El número máximo de iteraciones permitidas para laiteración fuerza varía entre itmin y itmax. El númeroreal permitido para una subetapa dado se eligeautomacamente por el programa para lograr unequilibrio entre la iteración y subiteración . El númerode iteración permitido tiende a ser mayor parasubiteración más pequeña.
Los valores predeterminados para itmin y itmax son 2y 100, respectivamente. Deben cumplir 2 itmin yitmax.
Factor de Convergencia
bajo el descanso de la iteración fuerza puede serutilizado por el ajuste del factor de convergencia, cf, aun valor menor que la unidad.
Los valores más pequeños aumentan la estabilidad dela iteración, pero requieren más iteraciones para lograrla convergencia.
. Si cf es mayor que la unidad puede reducir el númerode iteraciones necesarias para ciertos tipos deproblemas, pero puede causar inestabilidad en laiteración y no se recomienda.
El valor por defecto cf es 1. Debe satisfacer cf> 0.

Periodo Estático Normalmente todos los modos se tratan como dinámica. La
respuesta de un modo dinámico tiene dos partes: • respuesta forzada, que es directamente proporcional a la carga
modal • Respuesta transitoria, que es oscilatorio, y que depende de los
desplazamientos y las velocidades de la estructura al comienzodel paso de tiempo
Opcionalmente, puede especificar que los modos de altafrecuencia (período corto) se trata como estática, de modo quesiga la carga sin ninguna respuesta transitoria. Esto se realizaespecificando un periodo estático, tstat de tal manera que todoslos modos con períodos de menos de tstat se consideran modosestáticos. El valor predeterminado para tstat es cero, lo quesignifica que todos los modos se considera que son dinámicos.
Aunque tstat puede ser utilizado para cualquier historia detiempo no lineal de análisis, es el mas usado para análisisestático. Si los parámetros de iteración por defecto nofuncionan para este tipo de análisis, se puede probar conlos siguientes parámetros como punto de partida:
tstat mayor que el período más largo de la estructura itmax = itmin 1000 dtmax DTmin = dt = ftol 10^ -6 cf = 0,1 Esto provoca que todos los modos al ser tratados como
estática, utilise la iteración en lugar de subiteración paraencontrar una solución. La elección de los parámetros paralograr la convergencia es muy dependiente del problema, yse debe experimentar para encontrar los mejores valores autilizar para cada modelo diferente.

Análisis Directa de Integración no lineal
Este análisis está disponible en SAP2000. con las siguientes ventajas:
Amortiguación completa que las parejas de los modos se puedenconsiderar
Los problemas de propagación de impacto y de onda que podría surgirun gran número de modos puede ser resuelto de manera más eficientepor integración directa
• Todos los tipos de no lineales disponible en SAP2000 se puedenincluir en un análisis de la integración directa no lineal.
Los resultados directos de integración son extremadamente sensibles altamaño de paso de tiempo de una manera que no es cierto parasuperposición modal. Siempre se debe trabajar en el análisis de laintegración directa con la disminución de intervalos de tiempo hastaque el tamaño de tamaño de paso es tan pequeño que resultados ya noson afectados por ella.

Parámetros de tiempo de integración
. Se aplican las mismas consideraciones como para elanálisis lineal. (Revisar pag 117)
Si el análisis no lineal tiene problemas deconvergencia, es posible que desee utilizar el métodoHHT con alfa = -1 / 3 para obtener una solucióninicial, a continuación, se vuelve a ejecutar el análisiscon la disminución del tamaño de paso de tiempo yvalores alfa para obtener resultados más precisos.

La No linealidad Todo material no lineal que se ha definido en el modelo, se
considera en una relación de integración directa no lineal en el tiempo de ciclo de análisis.
La no linealidad geométrica que se debe tener en cuenta:
• Ninguno
• Efectos delta P
• Efectos de grandes desplazamientos
Si se va a proseguir a partir de un análisis no lineal anterior, se recomienda seleccionar los mismos parámetros geométricos no lineales para el caso actual como en el caso anterior. (page307)

Condiciones iniciales Usted puede continuar una relación de integración no
lineal directa en el tiempo de ciclo de análisis a partirde un análisis estático no lineal u otra integracióndirecta en tiempo de ciclo de análisis no lineal.
Se recomienda que seleccione los mismos parámetrosgeométricos no linealidad para el caso actual como enel caso anterior.
Amortiguación El análisis de la amortiguación de la estructura es
modelada utilizando una matriz de amortiguacióncompleta.
A diferencia de amortiguamiento modal, esto permiteque el acoplamiento entre los modos seanconsiderados.
Nota importante: Para la integración directa lineal enel ciclo de análisis, el amortiguamiento lineal eficacespara los elementos de conexión / Soporte también seutiliza. Sin embargo, no se utiliza para el análisis nolineal
Amortiguación proporcional a partir del caso de análisis
La matriz de amortiguamiento se calcula como unacombinación lineal de la matriz de rigidez reducido por uncoeficiente especificado, y la matriz de masa a escala por unsegundo coeficiente que especifique que :
Pueden calcularse mediante la especificación de fraccionesequivalentes de amortiguamiento modal críticos en dosperíodos o frecuencias diferentes.
La rigidez de amortiguación es linealmente proporcional ala frecuencia. Se relaciona con las deformaciones de laestructura. L rigidez de amortiguación amortiguaciónexcesivamente puede amortiguar las componentes de altafrecuencia.

La Rigidez-proporcional de amortiguación utiliza larigidez actual, tangente de la estructura en cada paso detiempo. Así, un elemento de rendimiento tendrá menosamortiguación que uno que sea elástica. Del mismomodo, un elemento hueco sólo tendrá proporcionales derigidez de amortiguación cuando el gancho se cierra.
La Masa de amortiguación proporcional es linealmenteproporcional a período. Se relaciona con el movimiento dela estructura, como si la estructura se mueve a través de unfluido viscoso . El exceso de esta masa puede amortiguarlos componentes de periodo largo.

Amortiguación proporcional de los Materiales
Puede especificar los coeficientes de amortiguamiento de la rigidez y la masa proporcional para materiales particulares. Por ejemplo, es posible que desee utilizar coeficientes mayores para los materiales del suelo que para el acero o el hormigón.
Solución iterativa
Las ecuaciones no lineales se resuelven iterativamenteen cada paso de tiempo. Esto puede requerir volver aformar y re-solucionar las matrices de la rigidez y laamortiguación. Las iteraciones se llevan a cabo hastaque converge la solución. Si la convergencia no puedeser alcanzado, el programa divide el paso de tiempo enpequeños pasos secundarios y lo intenta de nuevo.
Varios parámetros están disponibles para controlar elproceso de iteración y subiteración. Estos se describena continuación.
Máximo Subpaso Tamaño
El análisis siempre se parará en cada paso de tiempo desalida, y en cada paso de tiempo, donde una de lasentradas en el historial de tiempo de funciones sedefine. Es posible, además, establecer un límitesuperior en el tamaño de paso usado para laintegración.
El programa automáticamente puede utilizar inclusosubetapas más pequeñas si es necesario para lograr laconvergencia cuando se repite.
Tamaño mínimo Subpaso Cuando la iteración no lineal no puede converger en el
número máximo especificado de iteraciones, elprograma automáticamente reduce el tamaño y lointenta de nuevo.
Se puede limitar el tamaño mas pequeño de lasubetapa dentro del programa pero si el programatrata de reducir el tamaño de paso por debajo de estelímite, se detendrá el análisis e indican que laconvergencia había fracasado.
Iteraciones máximas por Paso La iteración se utiliza para asegurarse de que el
equilibrio se alcanza en cada etapa del análisis. Sepuede controlar el número de iteraciones permitidasen un paso antes de que el programa intenta utilizar unsubpaso más pequeño. El valor por defecto de 10funciona bien en muchas situaciones.

Tolerancia de Iteración de Convergencia
La iteración se utiliza para asegurarse de que el equilibriose alcanza en cada etapa del análisis. Se puede establecer latolerancia de convergencia relativa que se utiliza paracomparar la magnitud del error de la fuerza con lamagnitud de la fuerza que actúa sobre la estructura.
Puede que tenga que utilizar valores significativamentemenores de tolerancia de convergencia para obtenerbuenos resultados para los grandes problemas de losdesplazamientos para otro tipo de no linealidad.
Trate de disminuir los valores hasta que se obtengaresultados consistentes.