Compressed Sensing Linear Array SAR Autofocusing Imaging via...
12
基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法 韦顺军 * 田博坤 张晓玲 师 君 (电子科技大学电子工程学院 成都 611731) 摘 要:线阵合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR)3维成像技术是一种具有重要潜在 应用价值的新体制成像雷达,压缩感知稀疏重构是近几年实现LASAR高分辨3维成像的热点研究之一。但相对于 传统2维SAR,受线阵稀疏分布及阵列-平台2维联动,压缩感知LASAR成像面临回波数据欠采样、多维度高阶相 位误差等问题,传统SAR自聚焦算法难以适用于压缩感知LASAR 3维稀疏自聚焦成像。为克服欠采样条件下多维 度高阶相位误差对LASAR成像的影响,该文提出了一种基于半正定规划的压缩感知LASAR自聚焦成像算法。首 先,结合压缩感知成像理论、图像最大锐度及最小均方误差准则,构造欠采样条件下稀疏目标的相位误差估计模 型;其次,利用松弛半正定规划方法估计相位误差;最后,利用迭代逼近方法提高相位误差估计精度,实现压缩 感知LASAR高精度稀疏自聚焦成像。另外,通过主散射目标区域提取,仅采用主散射区域进行相位误差估计, 进一步提高自聚焦算法运算效率。仿真数据和实测数据验证了该文算法的有效性。 关键词:线阵SAR;稀疏自聚焦成像;最大锐度;半正定规划;压缩感知 中图分类号:TN957.52 文献标识码:A 文章编号:2095-283X(2018)06-0664-12 DOI: 10.12000/JR17103 引用格式:韦顺军, 田博坤, 张晓玲, 等. 基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法[J]. 雷达学报, 2018, 7(6): 664–675. DOI: 10.12000/JR17103. Reference format: Wei Shunjun, Tian Bokun, Zhang Xiaoling, et al.. Compressed sensing linear array SAR autofocusing imaging via semi-definite programming[J]. Journal of Radars, 2018, 7(6): 664–675. DOI: 10.12000/JR17103. Compressed Sensing Linear Array SAR Autofocusing Imaging via Semi-definite Programming Wei Shunjun Tian Bokun Zhang Xiaoling Shi Jun (School of Electronic Engineering University of Electronic Science and Technology of China, Chengdu 611731, China) Abstract: Linear Array Synthetic Aperture Radar (LASAR) is a novel and promising radar imaging technique. In recent years, Compressed Sensing (CS) sparse recovery has been a research focus for high-resolution three- Dimensional (3-D) LASAR imaging. Compared with the traditional two-Dimensional (2-D) SAR imaging, LASAR suffers from many problems, including under-sampling data and multi-dimensional and higher-order phase errors due to its sparse Linear Array Antenna (LAA) and the joint 2-D motions of the platform and LAA. The conventional autofocusing methods of 2-D SAR may be not suitable for CS-based LASAR 3-D sparse autofocusing. To address the multi-dimensional and higher-order phase errors in LASAR 3-D imaging with respect to under-sampling data, in this paper, we propose a sparse autofocusing algorithm based on semi- definite programming for CS-based LASAR imaging. First, by combining CS-based imaging theory, image maximum sharpness, and the minimum square error principle, we construct a LASAR phase-error estimation 收稿日期:2017-11-09;改回日期:2018-03-28;网络出版:2018-05-23 *通信作者: 韦顺军 [email protected] 基金项目:国家自然科学基金(61501098),博士后面上基金(2015M570778),高分青年基金项目(GFZX04061502),中央高校科研基本业务费 (ZYGX2016KYQD107) Foundation Items: The National Natural Science Foundation of China (61501098), The China Postdoctoral Science Foundation (2015M570778), The High Resolution Earth Observation Youth Foundation (GFZX04061502), The Fundamental Research Funds for the Central Universities (ZYGX2016KYQD107) 第 7 卷第 6 期 雷 达 学 报 Vol. 7No. 6 2018 年12 月 Journal of Radars Dec. 2018
Transcript of Compressed Sensing Linear Array SAR Autofocusing Imaging via...

基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法
韦顺军* 田博坤 张晓玲 师 君
(电子科技大学电子工程学院 成都 611731)
摘 要:线阵合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR)3维成像技术是一种具有重要潜在
应用价值的新体制成像雷达,压缩感知稀疏重构是近几年实现LASAR高分辨3维成像的热点研究之一。但相对于
传统2维SAR,受线阵稀疏分布及阵列-平台2维联动,压缩感知LASAR成像面临回波数据欠采样、多维度高阶相
位误差等问题,传统SAR自聚焦算法难以适用于压缩感知LASAR 3维稀疏自聚焦成像。为克服欠采样条件下多维
度高阶相位误差对LASAR成像的影响,该文提出了一种基于半正定规划的压缩感知LASAR自聚焦成像算法。首
先,结合压缩感知成像理论、图像最大锐度及最小均方误差准则,构造欠采样条件下稀疏目标的相位误差估计模
型;其次,利用松弛半正定规划方法估计相位误差;最后,利用迭代逼近方法提高相位误差估计精度,实现压缩
感知LASAR高精度稀疏自聚焦成像。另外,通过主散射目标区域提取,仅采用主散射区域进行相位误差估计,
进一步提高自聚焦算法运算效率。仿真数据和实测数据验证了该文算法的有效性。
关键词:线阵SAR;稀疏自聚焦成像;最大锐度;半正定规划;压缩感知
中图分类号:TN957.52 文献标识码:A 文章编号:2095-283X(2018)06-0664-12
DOI: 10.12000/JR17103
引用格式:韦顺军, 田博坤, 张晓玲, 等. 基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法[J]. 雷达学报,
2018, 7(6): 664–675. DOI: 10.12000/JR17103.
Reference format: Wei Shunjun, Tian Bokun, Zhang Xiaoling, et al.. Compressed sensing linear array SAR
autofocusing imaging via semi-definite programming[J]. Journal of Radars, 2018, 7(6): 664–675. DOI: 10.12000/JR17103.
Compressed Sensing Linear Array SAR Autofocusing Imagingvia Semi-definite Programming
Wei Shunjun Tian Bokun Zhang Xiaoling Shi Jun
(School of Electronic Engineering University of Electronic Science and
Technology of China, Chengdu 611731, China)
Abstract: Linear Array Synthetic Aperture Radar (LASAR) is a novel and promising radar imaging technique.
In recent years, Compressed Sensing (CS) sparse recovery has been a research focus for high-resolution three-
Dimensional (3-D) LASAR imaging. Compared with the traditional two-Dimensional (2-D) SAR imaging,
LASAR suffers from many problems, including under-sampling data and multi-dimensional and higher-order
phase errors due to its sparse Linear Array Antenna (LAA) and the joint 2-D motions of the platform and
LAA. The conventional autofocusing methods of 2-D SAR may be not suitable for CS-based LASAR 3-D sparse
autofocusing. To address the multi-dimensional and higher-order phase errors in LASAR 3-D imaging with
respect to under-sampling data, in this paper, we propose a sparse autofocusing algorithm based on semi-
definite programming for CS-based LASAR imaging. First, by combining CS-based imaging theory, image
maximum sharpness, and the minimum square error principle, we construct a LASAR phase-error estimation
收稿日期:2017-11-09;改回日期:2018-03-28;网络出版:2018-05-23
*通信作者: 韦顺军 [email protected]
基金项目:国家自然科学基金(61501098),博士后面上基金(2015M570778),高分青年基金项目(GFZX04061502),中央高校科研基本业务费
(ZYGX2016KYQD107)
Foundation Items: The National Natural Science Foundation of China (61501098), The China Postdoctoral Science Foundation
(2015M570778), The High Resolution Earth Observation Youth Foundation (GFZX04061502), The Fundamental Research Funds for the
Central Universities (ZYGX2016KYQD107)
第 7卷第 6期 雷 达 学 报 Vol. 7No. 6
2018年12月 Journal of Radars Dec. 2018

model based on under-sampled data. Next, we use semi-definite programming relaxation to estimate the phase
errors. Lastly, we employ an iterated approximation method to improve the precision of the phase-error
estimation and achieve the final CS-based LASAR autofocusing. To further improve the efficiency of the
algorithm, we select only the dominant scattering areas for LASAR phase-error estimation. We present our
simulation and experimental results to confirm the effectiveness of out proposed algorithm.
Key words: Linear Array Synthetic Aperture Radar (LASAR); Sparse autofocus imaging; Maximum sharpness;
Semi-Definite Programming (SDP); Compressed Sensing (CS)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)作为一种具有全天时、全天候、高分辨力、
大区域观测及信息量丰富的雷达成像技术,已成为
当今遥感对地观测的重要手段。因具备3维成像能
力,线阵SAR (Linear Array Synthetic ApertureRadar, LASAR)是近几年来被广泛关注的一种新体
制SAR 3维成像技术[1–4]。本质上,LASAR主要利
用线阵天线运动合成一个大的虚拟2维阵列实现观
测目标的2维分辨,再利用距离脉冲压缩技术实现
观测目标的3维成像。相对于其它常规SAR 3维成
像体制(如圆周SAR、层析SAR等), LASAR具备
成像模式多样、应用灵活等优势,克服了常规SAR3维成像体制无法下视、前视成像的缺陷,在城市
地形测绘、飞行器导航及盲降、目标精定位与识
别、战场情报获取等民用和军用领域具有重要的研
究价值和应用前景。
目前,LASAR 3维成像处理主要采用基于匹
配滤波理论的成像算法[1,2],如距离多普勒算法和
后向投影算法。受载荷平台(如飞机、无人机、卫
星等)空间及线阵天线长度限制,传统匹配滤波成
像算法在LASAR线阵方向的分辨能力通常比其它
维向的分辨力低,一定程度约束了LASAR高分辨
成像应用。然而,由于地面、空中等观测目标在
3维空间通常具有强稀疏性,故可利用目标稀疏先
验信息提升LASAR 3维成像精度。近几年,基于
压缩感知(Compressed Sensing, CS)理论的稀疏成
像已经成为LASAR高分辨成像的研究热点之一,
并提出了多种基于CS稀疏重构的LASAR 3维高分
辨稀疏成像方法[5–8]。但是,CS稀疏重构对成像模
型的精确性要求非常高,如在X波段雷达时位置精
度通常需要达到毫米级,现有压缩感知LASAR3维稀疏成像算法通常以成像模型精确已知为前
提,并没有考虑实际平台运动误差的影响。当
LASAR存在运动误差、阵列抖动时,则会导致成
像模型存在偏差,CS稀疏重构出现散焦、畸变、
虚假目标等成像质量恶化现象,甚至不能成像。另
外,与传统SAR系统单个或少量天线工作不同,
LASAR需要成百上千天线阵元同时工作,故仅利
用雷达系统中单个位置的导航测量系统(如IMU(Inertial Measurement Unit)系统、GPS (GlobalPositioning System)或北斗系统)数据难以实现
LASAR多个天线阵元运动误差的精确补偿。为了
提高压缩感知LASAR 3维成像质量,在利用导航
测量数据进行运动误差补偿后,还需结合回波数据
和自聚焦成像技术实现多天线阵元的残余运动误差
补偿。
至今,针对传统SAR成像中的运动误差补偿,
相关学者已经提出了多种基于不同准则的自聚焦成
像算法,如最大似然估计(Maximum Likelihood
Estimation, MLE)自聚焦、最小熵估计(Minimum
Entropy Estimation, MEE)自聚焦、最大锐度
(Maximum Sharpness Estimation, MSE)自聚焦等
方法。相位梯度自聚焦(Phase Gradient Autofocus,
PGA)算法作为一种在SAR实际成像中广泛应用的
典型MLE自聚焦成像算法,已被成功用于压缩感
知SAR稀疏成像中的残余相位误差补偿[9]。但是,
当回波数据欠采样时,传统自聚焦算法不一定适用
于压缩感知SAR稀疏自聚焦成像[10]。针对压缩感知
SAR 稀疏自聚焦问题,近几年相关学者也已经提
出一些解决方法。文献[11]提出了一种基于稀疏驱
动的联合SAR稀疏成像及相位误差校正方法,采用
迭代估计方法求解非二次正则化问题实现SAR稀疏
自聚焦成像。文献[12]提出一种针对稀疏微波成像
的自聚焦方法,采用贪婪算法实现相位误差的高精
度估计。文献[13]提出了一种基于子孔径参数稀疏
表示的机载SAR自聚焦成像算法,实测数据结果表
明该方法相对于传统PGA算法具有更好的自聚焦
性能。文献[14]针对运动误差造成的网格偏离现
象,提出了一种基于稀疏重构的聚束式SAR自聚焦
成像算法,采用正交匹配追踪及最速下降法实现稀
疏自聚焦成像。另外,还有一些文献提出基于其它
准则或估计模型的SAR 稀疏自聚焦算法[15–17]。然
而,与传统SAR运动误差形式不同,由于受线阵稀
疏分布及平台颤动、线阵抖动等联合运动误差影
响,LASAR成像模型中相位误差具有多维度、高
第 6期 韦顺军等:基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法 665

阶项分布等更复杂的形式,现有 SAR稀疏自聚焦
算法不一定适用于LASAR自聚焦成像。对此,本
文作者也提出了基于稀疏贝叶斯学习的LASAR自聚焦成像算法,在欠采样数据条件下可有效估计相
位误差[18,19],但是该方法需已知目标及相位的先验
分布特性并且要求较高的回波信噪比条件。
为了补偿欠采样条件下LASAR多维度高阶相
位误差,本文提出了一种基于半正定规划(Semi-Definite Programming, SDP)的压缩感知LASAR自聚焦成像算法,即半正定规划自聚焦(Semi-Def-inite Programming Sparse Autofocus, SDPSA)算法,简称为SDPSA算法。该方法利用LASAR压缩
感知成像原理、图像最大锐度及最小均方误差准
则,构造了欠采样条件下稀疏目标相位误差估计模
型,并通过松弛半正定规划及迭代逼近方法实现压
缩感知LASAR的高精度稀疏自聚焦成像。为了进
一步提高SDPSA算法自聚焦运算效率,利用主散
射目标区域提取,仅采用主散射区域进行相位误差
估计。仿真数据和实测数据验证了本文SDPSA算法的有效性,相对于PGA自聚焦算法,SDPSA算法在欠采样数据时具有更好的成像质量。本文的主
要结构如下:第2节简单介绍了压缩感知LASAR成像模型和稀疏成像原理,阐述了其阵列多相位中心
的相位误差影响;第3节建立LASAR相位误差估计
的半正定规划模型,提出了基于半正定规划的压缩
感知LASAR稀疏自聚焦成像方法,并介绍了该方
法的基本步骤;第4节利用LASAR仿真及实测数
据,分析SDPSA稀疏自聚焦成像算法性能,验证
了算法的有效性;第5节给出了本文算法的主要
结论。
2 压缩感知LASAR成像原理
2.1 回波线性测量模型
A = fQn = (xn; yn; zn) ;
n 2 [1; 2; ¢¢¢;NA]g
NA xn
yn zn n Qn
S=fPm=(xm; ym; zm) ;m 2 g S=f m;m2 g
= [1; 2; ¢¢¢;MS]
MS xm ym zm
LASAR 3维成像的典型几何模型如图1所示,
其中X, Y和Z轴分别表示切航迹、沿航迹和高度
向,线阵天线平行于X轴放置。假设LASAR系统
工作于正下视成像模式,
表示合成孔径时间内LASAR合成
的2维等效阵列天线相位中心(Antenna PhaseCenter, APC)位置集, 为2维APC总个数, ,
和 分别为第 个APC位置 的X, Y和Z轴位
置。在远场条件下,LASAR观测场景可近似为点
散射模型,并对观测场景进行3维离散化。令
和
分别表示LASAR离散观测场景的位置集和散射系
数集,其中 为观测场景的散射单
元序列, 为散射单元总数, , 和 分别为
m Pm m Pm第 个散射单元 的X,Y和Z轴位置, 为 的
散射系数。
Pm
假设LASAR系统发射线性调频信号,其原始
回波经过距离压缩后,散射单元 回波信号可表
示为:
sr (r;n;m) = m R (r ¡ Rn;m) exp (¡j2kRn;m) (1)
r k Rn;m = kQn ¡ Pmk2Pm n Qn
R (¢)R (r ¡ Rn;m)
exp (¡j2kRn;m)
其中, 表示距离域, 为波数,
为散射单元 到第 个APC位置 的距离,
为LASAR距离脉压模糊函数。式(1)第1项
提供了目标距离向分辨力,第2项
包含了目标沿航向及切航向信息。
对于离散全观测场景,LASAR回波信号可表示为
各个散射单元回波之和:
sr (r;n) =Xm2
sr (r;n;m) (2)
sr (r;n)
2 CMS£1 (ri;n) 2 CMS£1此时,回波信号 可表示为散射系数向
量 和时延相位向量 的
乘积:
s (ri;n)= (ri;n)T ; i=1; ¢¢¢;NR;n=1; ¢¢¢;NA (3)
= Vec [ m] ;m = 1; ¢¢¢;MS
(ri;n) = Vec [ R (r ¡ Rn;m)
¢ exp (¡j2kRn;m)] NR
Vec [¢]
其中, 为观测场景 的
散 射 系 数 向 量 ,
为LASAR时延相位向量, 为
距离采样点数, 表示向量化符号。因此,LASAR
回波信号线性测量模型可以表示为:
= + (4)
= Vec [sr (ri;n)] 2 CNRNA£1
= [ (ri;n)]T 2 CNRNA£MS
其中, 表示LASAR
脉压后的回波信号向量,
为回波 的线性测量矩阵, 为回波中的噪声向量。
2.2 CS稀疏成像
CS理论指出当信号可稀疏表示时,可利用远
低于Nyquist采样率进行采样,将原始信号重构问
题转化为线性约束最优化求解问题,实现稀疏信号
的精确重构[20]。若LASAR观测场景散射系数 具有
Z
v
Y
X
图 1 LASAR正下视3维成像的几何模型
Fig. 1 The geographic model of down-looking LASAR imaging
666 雷 达 学 报 第 7卷

`1
稀疏特征,根据CS稀疏重构理论,散射系数 可通
过求解如下 范数最优化问题进行重构:_= argmin k k1 ; s:t: k ¡ k2 · (5)
¸ k k2`1 ¡ `2
其中, 为回波信号 中噪声门限。若测量
矩阵 满足低相关条件,式(5)可等效为 联合
范数最小化问题求解:
_= argmin
³k k1+ k ¡ k2
´(6)
¸ 0
`1
`1
其中, 为稀疏约束正则化参数,用于均衡重
构误差及约束信号稀疏性。针对式(5)和式(6)中稀
疏信号 求解,至今学者们已提出多种经典稀疏重
构算法,如正交匹配追踪(Orthogonal MatchingPursuit, OMP)算法、最小绝对值收缩和选择
(Least Absolute Shrinkage Selection Operator,LASSO)算法、迭代加权 范数最小二乘(IterationReweighted norm Least Square, IRLS)算法、
贝叶斯压缩感知(Bayesian Compressed Sensing,BCS)算法等[21,22]。
2.3 相位误差
=£1; 2; ¢¢¢; NRNA
¤T由于受平台颤动、线阵抖动等联合运动误差影
响,LASAR 2维APC存在位置误差,会导致 LASAR成像模型存在多维度、高阶项分布的复杂相位误
差。令 表示LASAR回波数
据中2维APC位置不确定引起的相位误差向量,此
时LASAR回波信号的线性测量模型表示为:
= ( ) + (7)
( ) = diagnej 1; ej 2; ¢¢¢; ej NRNA
o
`1 ¡ `2
其中, 表示相位
误差矩阵。针对式(7),LASAR稀疏自聚焦成像目
的是根据已知的回波 及测量矩阵 ,估计未知散
射系数向量 和相位误差向量 ,其可表示为以下
组合范数的联合最优化问题:³_;_´
= argmin;
J ( ; )
= argmin;
³k k1+ k ¡ ( ) k2
´(8)
J ( ; )
³_;_´
若线阵天线阵元稀疏分布或回波信号欠采样,
LASAR自聚焦稀疏本质上是一个病态求逆问题,
直接求解 最优化问题十分困难。目前,稀
疏自聚焦算法通常采用基于某个准则的迭代算法以
估计 。如,文献[11,13]采用稀疏重构联合最
小MSE 准则实现SAR稀疏自聚焦,文献[19]采用最
大后验概率准则实现稀疏自聚焦,而不同稀疏自聚
焦准则具有不同的优劣及特点。
3 半正定规划稀疏自聚焦成像
3.1 半正定规划自聚焦原理
为了实现欠采样数据条件下LASAR稀疏自聚
焦,联合压缩感知LASAR成像原理、图像最大锐
度及最小均方误差重构准则,本文提出一种基于半
正定规划的LASAR稀疏自聚焦成像算法。该方法
采用迭代估计方法,给定估计初值及参数后,主要
由稀疏目标重构、相位误差估计两个独立过程循环
实现,其具体理论推导及实现过程如下。
i + 1
i_(i)
J1
µ;_(i)¶
(1) 稀疏目标重构。在算法第 次迭代中,
根据式(8)及第 次迭代的相位误差 ,构造目标
重构代价函数 ,则稀疏目标重构过程
可表示为:
_(i+1)= argmin J
µ;_(i)¶
= argminµ¸ k k1+
°°°° ¡µ
_(i)¶ °°°°
2
¶(9)
_(i+1)
i + 1
该过程为标准CS稀疏重构,可采用现有稀疏
重构方法求解 。兼顾精度及稳健性,本文利
用IRLS算法进行稀疏目标重构,此时第 次迭
代得到的LASAR稀疏目标散射系数估计向量为:
_(i+1)=h
H +³_(i+1)´i¡1
¢ H Hµ
_(i)¶
(10)
( )
( ) = diag½1Áq
jf 1j2+´; ¢¢¢; 1Áq
jf MSj2 + ´
¾= 10¡6
其中, 为对角矩阵,且
,
为小常数,一般选择为 。_(i+1)
J2³_(i+1)
;´
(2) 相位误差估计。利用式(9)得到的 ,
联合图像最大锐度及最小MSE准则构造相位误差
估计的代价函数 。
_
MF ( ) =H H ( )
对于最大锐度准则,采用传统匹配滤波重构结
果进行判定,因 ,则其图
像锐度可近似表示为:
MF ( ) ¼_HMF ( )
_
MF ( )
= H ( ) H H ( ) (11)
对于最小MSE准则,根据式(9),回波数据的
重构MSE表示为:
E³_(i+1)´
=°°° ¡ ( )
_(i+1)°°°2
(12)
J2³_(i+1)
;´
相位误差估计的代价函数 构造为:
第 6期 韦顺军等:基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法 667

J2³_(i+1)
;´= E
³_(i+1)´
¡ MF ( ) (13)
> 0
= 1 ! 0
!1
其中, 为加权因子,其控制图像锐度准则的
权重,本文选择 。可知, 时,式(13)相
位误差估计等效为仅利用最小均方误差(Mean
Square Error, MSE)准则,其估计过程与文献
[11,13]相似; 时,相位误差估计等效为用图
像最大锐度准则。
i + 1
J2³_(i+1)
;´
_(i+1)
因此,第 次迭代中SDPSA算法求解代价
函数 最小化问题估计LASAR阵列APC
的相位误差 ,其表示为:
_(i+1)= argmin J2
³_(i+1)
;´
= argminn
E³_(i+1)´
¡ MF ( )o
(14)
= e¡j = diag f gH ( ) ( ) =
若令相位误差向量 ,矩阵 ,
因 ,推导可得:
E³_(i+1)´
=
°°°° ¡ ( )h
H +³_(i+1)´i¡1 H H( )
°°°°2
=
°°°° ( )
½¡
hH +
³_(i+1)´i¡1 H¾ H( )
°°°°2
=k ( )k22°°°°½¡ h
H +³_(i+1) i¡1 H¾ H( )
°°°°2
=k ( )k2°°°°½ ¡
hH +
³_(i+1)´i¡1 H
¾ °°°°2
=k ( )k2 H (i+1) (15)
MF ( ) ¼ H ( ) H H ( ) = H (16)
J2³_(i+1)
;´¼ H (i+1) ¡ H (17)
(i+1) = H =
(¡
hH
+¸³_(i+1)´i¡1 H
¾= H = H
其中,矩阵 且矩阵
,矩阵 且 。
k ( )k2= 1=NANR(i+1) = (i+1) ¡
J2³_(i+1)
;´¼ H (i+1)
由 于 为 常 数 , 令 矩 阵
,相位误差估计代价函数近
似为 ,则式(14)最优化
问题变为:
_(i+1)= argmin J2
³_(i+1)
;´
= argmin³
H (i+1)´;
s:t: j nj = 1;n = 1; 2; ¢¢¢;N (18)
显然,式(18)最优化问题可采用恒定常数二次
规划(Constant Modulus Quadratic Programming,CMQP)方法求解。相位误差向量 的最优化估计
可等效为在 幅度值为1约束条件下的线性最小化
求解。但是,由于式(18)是非确定性多项式困难问
题,当向量 维数大时,CMQP等式的最优化求解
非常困难。因此,一般采用近似估计算法求解CM-QP最优解。
近年来,半正定规划(SDP)方法成为求解CMQP等式最优化问题的热门方法。对于CMQP最优化问
题求解,SDP过程的典型表达式为:
_= argmin tr
³(i+1)
´;
s:t: º 0; tr( n ) = gn;n = 1; 2; ¢¢¢;N (19)
= H
tr (¢) H (i+1) =
tr³
(i+1) H´= tr
³(i+1) H
´其中, 表示LASAR相位误差矩阵,
表示矩阵对角元素之和。因
,式(19)的CMQP
最优化求解可近似转换为以下半正定矩阵的最优化
估计问题。
_ (i+1)
opt = argmin tr³
(i+1)´;
s:t: º 0; ii = gn;n = 1; 2; ¢¢¢;N (20)
_ (i+1)
opt_(i+1)opt
_ (i+1)
opt
_(i+1)opt i + 1
_(i+1)
为了求解式(20)中的SDP问题,可利用现有的
凸优化算法估计求解,如共轭梯度方法、内点法
等。另外,目前许多学者也开发了各种SDP求解软
件工具箱,如CVX工具箱 [23]、SDPT3工具箱 [24]
等,可用于式(20) SDP问题的快速求解。获得矩阵
后,最优向量 可通过矩阵 分解得
到,具体实现方法可借鉴文献[25],本文不再详
述。若 已估,则第 次迭代中压缩感知
LASAR成像模型的相位误差估计 可表示为:
_(i+1)= ¡\ _(i+1)
opt (21)
_(i+1) _(i+1)获取相位误差估计 后,利用 对压缩
感知LASAR成像模型进行补偿,采用迭代逼近方
法循环处理,直至SDPSA算法结果满足精度要求。
3.2 算法流程
为了提高相位误差 的估计精度并且减少估计
过程的运算量,本文SDPSA算法中仅采用主散射
区域构造式(14)中代价函数。主散射点区域的估计
采用以下方法:(1) 在距离压缩后回波数据中根据
图像强度选择主散射目标距离单元;(2)根据所选
主散射目标距离单元图像估计目标主瓣宽度;
(3)根据目标主瓣宽度通过阈值选择主散射目标区
668 雷 达 学 报 第 7卷

0 = [1; 2; ¢¢¢;M0]
M0
0
0 ½
域。获取主散射目标区域后,令
表示这些主散射目标的序列集合, 是主散射目
标单元的总个数。此时,主散射目标区域 所对
应的LASAR测量矩阵变为 。
针对LASAR稀疏自聚焦成像,根据半正定规
划自聚焦成像原理,本文SDPSA算法的主要步骤
如表1所示,其主要步骤是迭代估计过程。
一般情况下,SDPSA算法经过20次迭代左右
可实现收敛。另外,SDPSA算法估计得到的相位
误差可能会存在线性偏移项,该误差仅导致SDPSA自聚焦成像结果与原始图像存在固定偏移,此时可
利用定标技术或其它线性相位误差估计方法进行补
偿校正,本文不再详述。
4 实验结果
4.1 仿真数据
为了验证SDPSA稀疏自聚焦成像方法的性能,
本节先利用LASAR仿真数据进行成像验证,并对
比基于传统PGA相位误差估计补偿的后向投影(BackProjection, BP)算法及迭代最小二乘(IRLS)稀疏成
像算法结果进行分析,分别简称为BP-PGA算法和
IRLS-PGA算法。其中,IRLS-PGA算法是将BP-PGA算法得到的相位误差对回波数据进行补偿后,
再利用IRLS算法进行稀疏成像。为了简便,该仿
真实验中只对LASAR单个等距离单元切面进行成
像,实际中对全部等距离单元切面进行成像后进行
合并即可得LASAR观测场景3维成像。
f cBr f s
VS[0; 50; 0]m=s H
LANC
NS NR
仿真中假设LASAR系统采用正下视工作模式,
主要仿真参数如下:雷达中心频率 为30 GHz,
发射信号带宽 为1 GHz,信号采样率 为1.2 GHz,
脉冲重复频率PRF为1200,载荷平台飞行速度 为
,飞行平台高度 为1000 m,线阵天
线长度 为5 m,线阵天线阵元为等间隔均匀分
布,线阵天线阵元数 为128,系统沿航向采样点
数 为128,距离向采样点数 为1024。值得注意
的是,为了便于CS测量矩阵 构造及计算,仿真
中线阵天线阵元间隔约为4个波长,只适用于小观
测场景成像仿真,但大场景仿真时应要求阵元间隔
小于半个波长以避免栅瓣影响。仿真中原始场景存
在4个单点目标,其散射系数相同。在成像处理中,
等距离切面成像空间与原始场景相同,平面空间范
围为64 m×64 m,被均匀离散化成64×64个分辨单元。
为了分析SDPSA算法在不同类型相位误差情况下
稀疏自聚焦性能,在仿真回波数据中分别加入缓变
和陡变的相位误差,并且在方位向-切航向平面随
机抽取50%和25%回波数据进行成像对比分析。
[0; 8 ][¡ ; ]
首先,在回波数据中加入沿航向缓变、切航迹
陡变的相位误差,其中沿航迹相位误差在 为
二次项函数、切航迹相位误差在 区间上服从
均匀随机分布,脉压后回波数据信噪比(Signal toNoise Ratio, SNR)为25 dB。图2给出了存在相位
误差时全部回波数据、50%方位-切航随机抽取回
波数据和25%方位-切航随机抽取回波数据情况下
BP未自聚焦、BP-PGA、BP-SDPSA(即利用
SDPSA算法估计得到的相位误差对BP算法进行补
偿)、IRLS未自聚焦、IRLS-PGA和SDPSA算法的
仿真点目标成像,其中图像显示经过归一化处理且
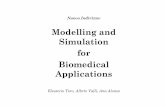
幅度取对数,图像显示门限为–30 dB。从图2可知,在此相位误差情况下BP算法和IRLS算法未自
聚焦时成像失效,点目标散焦严重;经过PGA算法相位误差补偿后,BP和IRLS沿航迹向成像质量
得到一定提升,但切航迹向成像提升不明显,BP-PGA和IRLS-PGA结果非目标区域仍然存在大量的旁瓣
或虚假目标,并且随着回波数据利用率减少自聚焦
成像性能下降。相对于PGA算法相位误差补偿,
SDPSA算法在全部回波数据、50%回波数据和
25%回波数据条件下均得到点目标的良好聚焦成像
结果,而且非目标区域几乎没有旁瓣和虚假目标。
另外,经过SDPSA算法相位误差补偿后,在不同
回波数据情况下BP-SDPSA成像结果较BP-PGA也抑制了沿航迹向和切航迹向的旁瓣水平,提高了自
聚焦成像质量。
表 1 SDPSA算法
Tab. 1 SDPSA algorithm
J1 ( ; ) J2 ( ; )输入:代价函数 和³_;_´
输出:估计值
i = 0 (0) = 0 K初始化:迭代次数 ,相位误差 ,门限 ,迭代总次数°°°_(i+1) ¡ _(i)°°°2
.°°°_(i)°°°2> i · K若 和 ,循环开始
步骤1 构造稀疏目标重构的代价函数:
J1
µ;_(i)¶= k k1+
°°°° ¡µ
_(i)¶ °°°°
2
步骤2 利用IRLS算法进行稀疏目标重构:
_(i+1)= argmin J1
µ;_(i)¶
步骤3 构造相位误差估计的代价函数:
J2³_(i+1)
;´¼ H (i+1)
步骤4 利用SDP方法求解最优问题:_
opt= argmin tr³
(i+1)´; s:t: º 0; ii = gn;n = 1; 2; ¢¢¢;N
_
opt_(i+1)
步骤5 利用 估计相位误差 ;
i à i + 1
循环结束
_Ã
_(i+1) _Ã
_(i+1)返回结果: ,
第 6期 韦顺军等:基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法 669

[¡ ; ]
其次,在回波数据沿航向和切航迹向均加入随
机相位误差,其在 区间上服从均匀随机分
布,脉压后回波数据SNR为25 dB。图3给出了存
在相位误差时全部回波数据、50%回波数据和
(a) BP未自聚焦(a) BP without
autofocus
(b) BP-PGA(b) BP-PGA
(c) BP-SDPSA(c) BP-SDPSA
(d) IRLS未自聚焦(d) IRLS without
autofocus
(e) IRLS-PGA(e) IRLS-PGA
(f) SDPSA(f) SDPSA
-15
-10
-5
0
5
10
15
Y (
m)
-15
-10
-5
0
5
10
15
Y (
m)
-15 -5 5 15
X (m)
-15 -5 5 15
X (m)
-15 -5 5 15
X (m)
-15 -5 5 15
X (m)
-15 -5 5 15
X (m)
-10
-5
0
5
10
15
Y (
m)
-15 -5 5 15
X (m)
图 2 沿航迹二次项及切航迹随机分布相位误差下仿真点目标成像结果
(上:全部回波数据;中:50%回波数据;下:25%回波数据)
Fig. 2 The results of the point targets in the case of the along-track quadratic phase errors and cross-track random phase errors
(Top: all samples; Middle: 50% samples; Bottom: 25% samples)
(a) BP未自聚焦(a) BP without
autofocus
(b) BP-PGA(b) BP-PGA
(c) BP-SDPSA(c) BP-SDPSA
(d) IRLS未自聚焦(d) IRLS without
autofocus
(e) IRLS-PGA(e) IRLS-PGA
(f) SDPSA(f) SDPSA
-15
-10
-5
0
5
10
15
Y (
m)
-15
-10
-5
0
5
10
15
Y (
m)
-15 -5 5 15
X (m)
-15 -5 5 15
X(m)
-15 -5 5 15
X (m)
-15 -5 5 15
X (m)
-15 -5 5 15
X (m)
-10
-5
0
5
10
15
Y (
m)
-15 -5 5 15
X (m)
图 3 沿航迹及切航迹随机分布相位误差下仿真点目标成像结果
(上:全部回波数据;中:50%回波数据;下:25%回波数据)
Fig. 3 The results of the point targets in the case of the along-track random phase errors and cross-track random phase errors
(Top: all samples; Middle: 50% samples; Bottom: 25% samples)
670 雷 达 学 报 第 7卷

25%回波数据情况下BP未自聚焦、BP-PGA、BP-SDPSA、IRLS未自聚焦、IRLS-PGA和SDPSA算法的仿真点目标成像,其图像显示同图2。从图3可知,在此随机相位误差情况下PGA算法性能提升
很小,尤其是非全部回波数据时BP-PGA和IRLS-PGA目标散射严重。然而, SDPSA算法在全部回
波数据、50%回波数据和25%回波数据时都实现了
点目标良好聚集成像,原始场景中4个单点目标被
精确恢复,并且BP-SDPSA成像结果旁瓣水平较
BP-PGA也大大降低。实验结果验证了SDPSA算法在压缩感知LASAR稀疏自聚焦成像的有效性,
说明了该算法可对LASAR稀疏回波数据条件下缓
变及陡变相位进行估计和补偿。
最后,为了分析SDPSA算法在不同SNR及迭
代次数情况下自聚焦性能,将图2中SNR变为0至30 dB,图4(a)给出了全部、50%和25%回波数据量
时SDPSA算法成像结果与原始仿真场景的MSE。可知,SDPSA算法的MSE随着SNR增大而变小,
并且在SNR为0 dB至5 dB时MSE大于0.1,但
SNR大于10 dB后MSE均小于0.1且变化很小。因
此,当脉压后回波数据SNR大于10 dB时,SDPSA算法可良好实现稀疏自聚焦成像。对于LASAR原始回波数据,通常其脉冲压缩后回波数据SNR可优
于10 dB,满足SDPSA算法稀疏自聚焦成像要求。
图4(b)给出了回波数据SNR为20 dB,全部、
50%和25%回波数据量时SDPSA算法MSE随迭代次
数变化曲线,可知全部数据成像时5次迭代后基本
收敛,而在50%和25%回波数据时10次迭代后基本
收敛,此时算法MSE均小于0.1。4.2 实测数据
f c Brf s
LA
为了进一步验证本文SDPSA算法的有效性,
利用本课题组地基等效LASAR实验系统获取的实
测数据进行稀疏自聚焦成像分析。地基等效LASAR实验系统实物图如图5(a)所示,系统主要参数如
下:雷达中心频率 为9.62 GHz,发射信号带宽 为
80 MHz,信号采样率 为120 MHz,线阵长度
为1.25 m。实验场景为地面足球场并布置3个参考
球目标,其光学图像如图5(b)和图5(c)所示,包含
5 10 15 20 25 30
SNR(dB)
0
0.1
0.2
0.3
0.4
0.5
0.6
MSE
5 10 15 20 25 30
迭代次数
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
MSE
全部回波数据
50%回波数据
25%回波数据
全部回波数据
50%回波数据
25%回波数据
(a) 随SNR变化(a) MSE versus the SNR
(b) 随迭代次数变化(b) MSE versus the iterative number
图 4 SDPSA算法MSE变化曲线
Fig. 4 The MSE curve of SDPSA
2
2.4 m 1.2 m
14.5 m
1
1
3
2
(a) (a) The optical picture of
the LASAR system
(b) (b) The underlying balls scene
0.7 m
1.3 m
1.8 m
(c) (c) The underlying light scene
图 5 地基等效LASAR成像实验
Fig. 5 The ground-based LASAR experiment
第 6期 韦顺军等:基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法 671

了两种目标类型:简单的球目标和较复杂的路灯铁栅
栏,该观测场景中心到实验平台的距离大约为100 m。
N = 10000
图6(a)给出了实验系统天线扫描的2维轨迹,
可等效为一个虚拟的2维天线阵列,此虚拟阵列大
小为1.25 m×1.25 m,阵列的阵元个数为10416,
此时观测区域成像不会出现栅瓣。图6(b)为图6(a)
对应的脉压后回波数据,其中球1回波对应于第
18个距离单元数据、球2和球3对应于第29个距离单
元数据,路灯对应于第76个距离单元数据。为了分
析测量阵元样本数对压缩感知LASAR稀疏自聚焦
成像的影响,本节图6(b)选择 个阵元的
脉压后回波数据,并以此数据作为参考的全部回波
数据,然后分别从该10000样本阵元数中随机选择
[¡ =2; =2]
5000和2000个阵元的回波数据作为稀疏2维阵列回
波。在回波数据加入2维阵列平面相位误差,该相
位误差在 区间上服从均匀随机分布,并
对比传统PGA算法,分析压缩感知LASAR自聚焦
成像性能。
图7给出了10000, 5000和2000阵元回波数据条
件下采用BP-PGA, IRLS-PGA及本文SDPSA算法
获得的实验球目标自聚焦成像结果,其中图像已归
一化且显示门限为最大值–25 dB。从图7成像结果
看出,在10000个阵元回波数据时3种算法对3个参
考球目标均能良好自聚焦成像,且IRLS-PGA算法
和本文SDPSA算法结果相似,说明PGA算法和本
文算法在10000个阵元回波数据时自聚焦性能相
(a) 合成阵列平面(a) The virtual array antenna
(b) 脉压后回波数据(b) The range-compression echo
0 0.2 0.4 0.6 0.8 1.0 1.2
沿航迹 (m)
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
切航迹
(m
)
2000 4000 6000 8000 10000
合成平面阵元
10
20
30
40
50
60
70
80
90
100
距离向
图 6 地基LASAR合成阵列平面及回波数据
Fig. 6 The virtual array antenna and the echo of the ground-based LSAR
(a) 10000 阵元(a) 10000 array elements
(b) 5000 阵元(b) 5000 array elements
球1
球2
球3
-5
0
5
Z (
m)
-5
0
3020
100
5Y (m)
X (m)
-5
0
3020
100
5Y (m)
X (m)
-5
0
3020
100
5Y (m)
X (m)
球1
球2
球3
-5
0
5
Z (
m)
球1
球2
球3
-5
0
5
Z (
m)
球1
球2
球3
-5
0
5
Z (
m)
球1
球2
球3
-5
0
5
Z (
m)
球1
球2
球3
-5
0
5
Z (
m)
-5
0
3020
100
5Y (m)
X (m)
-5
0
3020
100
5Y (m)
X (m)
-5
0
3020
100
5Y (m)
X (m)
672 雷 达 学 报 第 7卷

当。但是,在5000和2000阵元回波数据成像时,
BP-PGA算法出现严重旁瓣干扰,3个参考球目标
在X -Z平面存在很高的旁瓣串扰; IRLS-PGA算法在球体目标周围出现虚假目标,且2000阵元样
本时结果更加恶化,说明PGA自聚焦算法在数据
欠采样时相位误差估计精度下降,并且随着样本数
减少自聚焦性能变差。然而,SDPSA算法在5000
和2000稀疏阵元样本时,成像结果与10000阵元基
本一致,较IRLS-PGA算法结果大大抑制了虚假目
标,说明SDPSA算法的相位误差估计性能优于PGA算法,在稀疏欠采样数据时仍可良好实现LASAR相位误差估计和校正。
图8给出了10000, 5000和2000阵元回波数据条
件下采用BP-PGA, IRLS-PGA及本文SDPSA算法
(c) 2000 阵元(c) 2000 array elements
球1
球2
球3
-5
0
5Z (
m)
球1
球2
球3
-5
0
5
Z (
m)
球1
球2
球3
-5
0
5
Z (
m)
-5
0
3020
100
5Y (m)
X (m)
-5
0
3020
100
5Y (m)
X (m)
-5
0
3020
100
5Y (m)
X (m)
图 7 球目标实测数据稀疏自聚焦成像结果
(左:BP-PGA算法;中:IRLS-PGA算法;右:SDPSA算法)
Fig. 7 The sparse autofocusing results of the experimental balls data
(Left: BP-PGA; Middle: IRLS-PGA; Right: SDPSA)
(a) 10000 阵元(a) 10000 array elements
(b) 5000 阵元(b) 5000 array elements
(c) 2000 阵元(c) 2000 array elements
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
-30-20-10
3020
100
3040
2010
0Y (m)
X (m) -30
-20-10
3020
100
3040
2010
0Y (m)
X (m)
-30-20-10
3020
100
3040
2010
0Y (m)
X (m)
-30-20-10
3020
100
3040
2010
0Y (m)
X (m) -30
-20-10
3020
100
3040
2010
0Y (m)
X (m)
-30-20-10
3020
100
3040
2010
0Y (m)
X (m)
-30-20-10
3020
100
3040
2010
0Y (m)
X (m) -30
-20-10
3020
100
3040
2010
0Y (m)
X (m)
-30-20-10
3020
100
3040
2010
0Y (m)
X (m)
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
铁栅栏2 铁栅栏1
灯
-10
0
10
Z (
m)
图 8 路灯目标实测数据稀疏自聚焦成像结果
(左:BP-PGA算法;中:IRLS-PGA算法;右:SDPSA算法)
Fig. 8 The sparse autofocusing results of the experimental light data
(Left: BP-PGA; Middle: IRLS-PGA; Right: SDPSA)
第 6期 韦顺军等:基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法 673

获得的路灯铁栅栏目标自聚焦成像结果,其中图像
已归一化且显示门限为最大值–20 dB。从图8成像
结果看出,相对传统BP-PGA和IRLS-PGA算法,
SDPSA算法在10000, 5000和2000阵元样本时对路
灯和铁栅栏目标成像均有明显提升,同样验证了
SDPSA算法稀疏自聚焦性能优于传统PGA算法,
在稀疏阵元采样数据时可实现LASAR相位误差估
计和校正。综上,地基LASAR实测数据实验结果
验证了本文SDPSA算法的有效性。
5 结论
本文提出了一种基于半正定规划的压缩感知
LASAR自聚焦3维成像算法。该SDPSA方法结合
LASAR压缩感知成像原理及最小均方误差准则,
利用松弛半正定规划方法及迭代最优方法估计相位
误差,实现压缩感知LASAR的高精度自聚焦成
像,并且为了进一步提高自聚焦算法运算效率,通
过主散射目标区域进行相位误差估计。仿真数据和
实测数据验证了本文SDPSA算法的有效性,实验
结果说明相对于传统PGA自聚焦算法,SDPSA算法在稀疏采样数据条件下具备更好的稀疏自聚焦成
像结果,可为LASAR 3维成像技术实际应用提供
技术途径。在未来工作中,可开展算法优化研究,
进一步提升SDPSA算法的运算效率。
参 考 文 献
Du L, Wang Y P, Hong W, et al.. A three-dimensional
range migration algorithm for downward-looking 3D-SAR
with single-transmitting and multiple-receiving linear array
antennas[J]. EURASIP Journal on Advances in Signal
Processing, 2010, 2010: 957916. DOI: 10.1155/2010/957916.
[1]
Liao K F, Zhang X L, and Shi J. Plane-wave synthesis and
RCS extraction via 3-D linear array SAR[J]. IEEE
Antennas and Wireless Propagation Letters, 2015, 14:
994–997. DOI: 10.1109/LAWP.2015.2389264.
[2]
Han K Y, Wang Y P, Tan W X, e t a l . . E f f i c i ent
pseudopolar format algorithm for down-looking linear-array
SAR 3-D imaging[J]. IEEE Geoscience and Remote Sensing
Letters , 2015, 12(3): 572–576. DOI: 10.1109/LGRS.
2014.2351792.
[3]
Zhang S Q, Zhu Y T, and Kuang G Y. Imaging of
downward-looking linear array three-dimensional SAR based
on FFT-MUSIC[J]. IEEE Geoscience and Remote Sensing
Letters , 2015, 12(4): 885–889. DOI: 10.1109/LGRS.
2014.2365611.
[4]
Wei S J, Zhang X L, and Shi J. Linear array SAR imaging
via compressed sensing[J]. Progress In Electromagnetics
Research, 2011, 117: 299–319. DOI: 10.2528/PIER11033105.
[5]
Zhang S Q, Zhu Y T, Dong G G, et al.. Truncated SVD-
based compressive sensing for downward-looking three-
dimensional SAR imaging with uniform/nonuniform linear
array[J]. IEEE Geoscience and Remote Sensing Letters,
2015, 12(9): 1853–1857. DOI: 10.1109/LGRS.2015.2431254.
[6]
Zhang S Q, Dong G G, Kuang G Y, et al.. Superresolution
downward-looking linear array three-dimensional SAR
imaging based on two-dimensional compressive sensing[J].
IEEE Journal of Selected Topics in Applied Earth
Observations and Remote Sensing, 2016, 9(6): 2184–2196.
DOI: 10.1109/JSTARS.2016.2549548.
[7]
Peng X M, Tan W X, Hong W, et al.. Airborne DLSLA 3-D
SAR image reconstruction by combination of polar
formatting and L1 regularization[J]. IEEE Transactions on
Geoscience and Remote Sensing, 2016, 54(1): 213–226. DOI:
10.1109/TGRS.2015.2453202.
[8]
Tian J H, Sun J P, Han X, et al.. Motion compensation for
compressive sensing SAR imaging with autofocus[C].
Proceedings of the 6th IEEE Conference on Industrial
Electronics and Applications (ICIEA), Beijing, China, 2011:
1564–1567. DOI: 10.1109/ICIEA.2011.5975839.
[9]
Cetin M, Stojanovic I, Onhon O, et al.. Sparsity-driven
synthetic aperture radar imaging: Reconstruction,
autofocusing, moving targets, and compressed sensing[J].
IEEE Signal Processing Magazine, 2014, 31(4): 27–40. DOI:
10.1109/MSP.2014.2312834.
[10]
Onhon N Ö and Cetin M. A sparsity-driven approach for
joint SAR imaging and phase error correction[J]. IEEE
Transactions on Image Processing, 2012, 21(4): 2075–2088.
DOI: 10.1109/TIP.2011.2179056.
[11]
Zhe Z, Yao Z, Jiang C L, et al.. Autofocus of sparse
microwave imaging radar based on phase recovery[C].
Proceedings of 2013 IEEE International Conference on
Signal Processing, Communication and Computing
(ICSPCC), Kunming, China, 2013: 1–5. DOI: 10.1109/
ICSPCC.2013.6663989.
[12]
Chen Y C, Li G, Zhang Q, et al.. Motion compensation for
airborne SAR via parametric sparse representation[J]. IEEE
Transactions on Geoscience and Remote Sensing, 2017,
55(1): 551–562. DOI: 10.1109/TGRS.2016.2611522.
[13]
Camlica S, Gurbuz A C, Arikan O, et al.. Autofocused
spotlight SAR image reconstruction of off-grid sparse
scenes[J]. IEEE Transactions on Aerospace and Electronic
Systems, 2017, 53(4): 1880–1892. DOI: 10.1109/TAES.
2017.2675138.
[14]
Uḡur S and Arıkan O. SAR image reconstruction and auto-
focus by compressed sensing[J]. Digital Signal Processing,
2012, 22(6): 923–932. DOI: 10.1016/j.dsp.2012.07.011.
[15]
Kelly S, Yaghoobi M, and Davies M. Sparsity-based[16]
674 雷 达 学 报 第 7卷

autofocus for undersampled synthetic aperture radar[J].
IEEE Transactions on Aerospace and Electronic Systems,
2014, 50(2): 972–986. DOI: 10.1109/TAES.2014.120502.
Uḡur S, Arıkan O, and Gürbüz A C. Off-grid sparse SAR
image reconstruction by EMMP algorithm[C]. Proceedings
of 2013 IEEE Radar Conference (RADAR), Ottawa, ON,
Canada, 2013: 1–4. DOI: 10.1109/RADAR.2013.6586034.
[17]
Wei S J and Zhang X L. Sparse autofocus recovery for
under-sampled linear array SAR 3-D imaging[J]. Progress
In Electromagnetics Research, 2013, 140: 43–62. DOI:
10.2528/PIER13020614.
[18]
Wei S J, Zhang X L, and Shi J. Sparse autofocus via
Bayesian learning iterative maximum and applied for
LASAR 3-D imaging[C]. Proceedings of 2014 IEEE Radar
Conference, Cincinnati, OH, USA, 2014: 666–669. DOI:
10.1109/RADAR.2014.6875674.
[19]
Donoho D L. Compressed sensing[J]. IEEE Transactions on
Information Theory , 2006, 52(4): 1289–1306. DOI:
10.1109/TIT.2006.871582.
[20]
Figueiredo M A T, Nowak R D, and Wright S J. Gradient
projection for sparse reconstruction: Application to
compressed sensing and other inverse problems[J]. IEEE
Journal of Selected Topics in Signal Processing, 2007, 1(4):
586–597. DOI: 10.1109/JSTSP.2007.910281.
[21]
Ji S H, Xue Y, and Carin L. Bayesian compressive
sensing[J]. IEEE Transactions on Signal Processing, 2008,
56(6): 2346–2356. DOI: 10.1109/TSP.2007.914345.
[22]
Grant M and Boyd S. CVX: Matlab software for disciplined
convex programming, version 1.21[R]. CVX Research, Inc.,
2010. Available from: URL: http://cvxr.com/cvx.
[23]
Toh K C, Todd M J, and Tütüncü R H. SDPT3—A Matlab
software package for semidefinite programming, version
1.3[J]. Optimization Methods and Software, 1999, 11(1/4):
545–581. DOI: 10.1080/10556789908805762.
[24]
Liu K H, Wiesel A, and Munson D C. Synthetic aperture
radar autofocus via semidefinite relaxation[J]. IEEE
Transactions on Image Processing, 2013, 22(6): 2317–2326.
DOI: 10.1109/TIP.2013.2249084.
[25]
作 者 简 介
韦顺军(1983–),男,广西柳州人,博
士,2013年获电子科技大学工学博士学
位,目前为电子科技大学信息与通信工
程学院副教授,主要从事合成孔径雷达
成像、阵列雷达3维成像等技术研究,
已发表论文30余篇。
E-mail: [email protected]
田博坤(1993–),男,河北沧州人,电子
科技大学博士生,主要从事合成孔径雷
达成像研究。
E-mail: [email protected]
张晓玲(1964–),女,四川成都人,博
士,2002年获电子科技大学工学博士学
位,目前为电子科技大学信息与通信工
程学院教授,博士生导师,主要从事
SAR成像技术、雷达探测技术研究,已
发表论文50余篇。
E-mail: [email protected]
师 君(1979–),男,河南南阳人,博
士,2009年获电子科技大学工学博士学
位,目前为电子科技大学信息与通信工
程学院副教授,博士生导师,主要从事
SAR成像技术、雷达信号处理研究,已
发表论文50余篇。
E-mail: [email protected]
第 6期 韦顺军等:基于半正定规划的压缩感知线阵三维SAR自聚焦成像算法 675