第二章機構的組成 Formation of Mechanisms - NFUsparc.nfu.edu.tw/~allen/ch2.pdf ·...
19
1 1 機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999) 第二章 機構的組成 Formation of Mechanisms 2-1 機件 ◎機件 (Machine member)是具有阻抗性的物體,為組成機構所必須具備的要件, 它們的大小、形狀、功能通常多不相同;依其抗力特性,可以是剛性件(Rigid member)、撓性件(Flexible member)、壓性件(Compression member)。 ○連桿 (Link)是剛性機件,用來分開接頭,並且傳遞運動與力量。 ○滑件 (Slider)是與直線或曲線導件做相對滑動接觸的連桿。 ○滾子 (Roller)是圓柱形或球形的連桿,與其相鄰接的機件做相對滾動運動。 ○凸輪 (Cam)是不規則形狀的連桿,當做主動件以傳遞特定的運動給從動件。 ○齒輪 (Gear)是一種連桿,靠著輪齒的連續嚙合,將旋轉或直線運動很確定地傳遞 至與其相鄰接的齒輪。 ○皮帶 (Belt)是撓性機件,與帶輪(Pulley)配合,依靠摩擦力傳遞運動與動力。 ○繩索 (Rope)是撓性機件,與槽輪(Sheave)配合,傳達相當距離兩軸間的動力。 ○鏈條 (Chain)是撓性機件,在受到張力時才有作用;它與鏈輪(Sprocket)相配合, 用以確定的傳達運動與動力。 ○摩擦輪 (Friction wheel)是剛性件,利用摩擦力來傳達運動與動力。 ○彈簧 (Spring)是撓性機件,用來貯存能量、施力、以及產生彈性連接。 02-01
Transcript of 第二章機構的組成 Formation of Mechanisms - NFUsparc.nfu.edu.tw/~allen/ch2.pdf ·...
-
11機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
第二章 機構的組成 Formation of Mechanisms2-1 機件
◎機件(Machine member)是具有阻抗性的物體,為組成機構所必須具備的要件,它們的大小、形狀、功能通常多不相同;依其抗力特性,可以是剛性件(Rigidmember)、撓性件(Flexible member)、壓性件(Compression member)。
○連桿(Link)是剛性機件,用來分開接頭,並且傳遞運動與力量。○滑件(Slider)是與直線或曲線導件做相對滑動接觸的連桿。○滾子(Roller)是圓柱形或球形的連桿,與其相鄰接的機件做相對滾動運動。○凸輪(Cam)是不規則形狀的連桿,當做主動件以傳遞特定的運動給從動件。○齒輪(Gear)是一種連桿,靠著輪齒的連續嚙合,將旋轉或直線運動很確定地傳遞至與其相鄰接的齒輪。
○皮帶(Belt)是撓性機件,與帶輪(Pulley)配合,依靠摩擦力傳遞運動與動力。○繩索(Rope)是撓性機件,與槽輪(Sheave)配合,傳達相當距離兩軸間的動力。○鏈條(Chain)是撓性機件,在受到張力時才有作用;它與鏈輪(Sprocket)相配合,用以確定的傳達運動與動力。
○摩擦輪(Friction wheel)是剛性件,利用摩擦力來傳達運動與動力。○彈簧(Spring)是撓性機件,用來貯存能量、施力、以及產生彈性連接。
02-01
-
22機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
2-2 接頭
◎為使機件有所作用,機件與機件之間必須以特定的方式加以連接。◎一機件與另一機件直接接觸的部分,稱為對偶元素(Pairing element)。◎一個運動對(Kinematic pair),乃是由兩個直接接觸機件的對偶元素所配連而成;運動對通常以接頭(Joint)稱之。
◎運動對的分類如下:1. 自由度(Degrees of freedom)是指定義運動對中一個對偶元素與另一個對偶元素之相對位置所需的獨立坐標數。一個不受拘束的對偶元素,可以有三個移動自由度與三個轉動自由度,共六個自由度。它與另一個對偶元素配連成運動對後,因受拘束而損失一個或多個自由度。因此,一個運動對最多只能有五個自由度,最少也得有一個自由度。
2. 運動方式(Type of motion)是指運動對中一個對偶元素上的一點相對於另一個對偶元素的運動,不外乎直線(或曲線)運動、平面(或曲面)運動、或空間運動。
3. 接觸方式(Type of contact)是指運動對中兩個對偶元素互相接觸的方式,不外乎點接觸、線接觸、或面接觸。
02-02
-
33機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
◎接頭的種類如下:○旋轉對(Revolute pair, turning pair)所屬兩個對偶元素間的相對運動,是對於旋轉軸的轉動,它具有一個自由度,是圓弧運動與面接觸。
○滑行對(Prismatic pair, sliding pair)所屬兩個對偶元素間的相對運動,是對於滑行面的滑動,它具有一個自由度,是直線運動與面接觸。
○滾動對(Rolling pair)所屬兩個對偶元素間的相對運動,是不帶滑動的純滾動,它具有一個自由度,是擺線運動與線接觸。
○凸輪對(Cam pair)所屬兩個對偶元素間的相對運動,是滑動與滾動的組合,它具有二個自由度,是曲線運動與線接觸。
○齒輪對(Gear pair)所屬兩個對偶元素間的相對運動和凸輪對一樣。○螺旋對(Helical pair, screw pair)所屬兩個對偶元素間的相對運動,是對於旋轉軸的螺旋運動,它具有一個自由度,是曲線運動與面接觸。
○圓柱對(Cylindrical pair)所屬兩個對偶元素間的相對運動,是對於旋轉軸的轉動和平行於此軸之移動組合,它具有二個自由度,是曲線運動與面接觸。
○球面對(Spherical pair)所屬兩個對偶元素間的相對運動,是對於球心的轉動,它具有三個自由度,是球面運動與面接觸。
○平面對(Planar pair, flat pair)所屬兩個對偶元素間的相對運動,是平面運動,它具有三個自由度,是平面運動與面接觸。
02-03
-
44機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
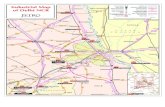
圖2.1 接頭的種類
02-04
-
55機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
2-3 機構
◎將機件及接頭以特定的方式組合,使其中一個或數個機件之運動依照該組合所形成的規律,迫使其它機件各產生一種可以確定預期的運動,並且機件中有一個為機架用以支托或約束各運動件固定不動的部分,這個組合即為機構(Mechanism)。
◎若機構中所有的機件皆為連桿,且所有的接頭皆為旋轉對,則這個機構特稱為連桿組(Linkage)。
◎機構可根據其運動空間概分為平面機構與空間機構。
◎機構中的機件在運動時,若其上每一點與某一特定平面的距離恆為一定,則這個機構稱為平面機構(Planar mechanism, plane mechanism)。
◎機構中的機件在運動時,若其上有一點的運動軌跡為空間曲線,則這個機構即為空間機構(Spatial mechanism, space mechanism)。
02-05
-
66機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
圖2.2 引擎機構 圖2.3 動力鋸機構
02-06
-
77機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
2-4 簡圖符號
◎分析機構的拓樸構造與運動狀態時,常需要用簡圖來說明機件間的鄰接關係與相對位置,如果使用實體或其組合圖來進行,會因實體或圖面的複雜性,使分析工作難以有效的進行。因此在機構學中,常只用簡單的圖形,來說明機件間的鄰接關係與相對位置。依據這種目的所繪出的機構圖形,稱之為機構骨架圖(Skeleton)或稱之為機構簡圖。
◎機構簡圖的繪製有兩種方式,一為構造簡圖,另一為運動簡圖,端視使用目的而定。構造簡圖(Structural sketch)在於表示機構的拓樸構造,只要清楚地表示出機件與接頭間的附隨關係即可,而不在乎各個機件的幾何尺寸大小。運動簡圖(Kinematic sketch)乃是依照實體或組合圖的尺寸,以一定的比例畫出其幾何運動的相對位置關係,用來表示各機件之尺寸及各接頭的位置。
◎機構簡圖的繪製,應儘量使用簡單之線條與符號來代替實體的機件與接頭,與分析機構之拓樸構造或運動狀態無關的資料,如軸、鍵、銷、軸承、螺絲尺寸線、剖面線、…等,則不予表示出來。
◎簡圖符號的制定,並無一定的法則,只要清楚地表示出機構的拓樸構造或運動關係即可。
02-07
-
88機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
圖2.4 機件的簡圖符號
02-08
-
99機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
圖2.5 接頭的簡圖符號
02-09
-
1010機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
圖2.6 引擎機構簡圖
圖2.7 動力鋸機構簡圖
02-10
-
1111機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
2-5 運動鏈
在機構設計的過程中,為了能有系統的進行拓樸構造分析與合成,常將機構簡圖更進一步簡化為運動鏈(Kinematic chain),其步驟如下:
一. 將一跟與j個接頭附隨的機件,以一個j邊形表示之。二. 將一個與n根桿件附隨的任何種類接頭,以一個內部塗黑的小圓表示之。三. 將固定桿(即機架)放開,即沒有固定桿存在。
圖2.8 引擎機構運動鏈 圖2.9 動力鋸機構運動鏈
02-11
-
1212機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
◎具N根機件與J個接頭的運動鏈,稱之為(N,J)運動鏈。
◎有關(N,J)運動鏈目錄之合成的研究,即到底有幾個不同構的運動鏈具有N根機件與J個接頭,稱為數目合成(Number )。
◎本書目錄所示之運動鏈,乃是針對連接(Connected)、封閉(Closed)、且無切桿(Cut-link)型的運動鏈而言。
◎若運動鏈中的接頭皆為旋轉對(以中空小圓表示之),則具有三桿迴路或者自由度為零的子運動鏈,將形成一個過度拘束的結構。因此,在運用上述運動鏈目錄時,必須將具有三個迴路或者自由度為零的子運動鏈去除。以圖2.13(a)所示的3個(6,7)運動鏈為例,若接頭皆為旋轉對,則只有左右邊兩個不具三桿迴路子鏈者可供使用。
◎機構中一定有機件為固定桿。因此,選擇運動鏈中不同的桿件為固定桿,可衍生出許多不同的機構,稱為運動倒置(Kinematic inversion)。
◎具相同運動鏈、但不同固定桿的機構,互稱為倒置機構。
02-12
-
1313機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
圖2.10 (3,3)運動鏈目錄 圖2.11 (4,4)和(4,5)運動鏈目錄
圖2.12 (5,5)、(5,6)、以及(5,7)運動鏈目錄
02-13
-
1414機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
圖2.13 (6,7)和(6,8)運動鏈目錄
02-14
-
1515機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
圖2.14 (7,8)和(7,9)運動鏈目錄
02-15
-
1616機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
圖2.15 (8,10)運動鏈目錄
02-16
-
1717機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
*2-6 拓樸構造
◎機構的拓樸構造(Topological structure),是指機構中機件與接頭的數目,以及機件和接頭之間的鄰接與附隨關係。
◎機構的拓樸構造可以機構拓樸構造矩陣(Mechanism topology matrix, MTM)表示之。
一個具有N根機件之機構的拓樸構造矩陣,為一個N×N的方矩陣:
○對角元素aii=NT表示機件i的類型○假如機件i與機件k相鄰接
右上角非對角線元素aik=JT(i
-
1818機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
[例2.1] 凸輪-滾子-致動器機構,圖2.16。此機構為平面機構,具有五根機件(1、2、3、4、5),分別是機架(KF,機件
1)、凸輪(KA,機件2)、滾子(KO,機件3)、活塞(KP,機件4)、以及汽壓缸(KC,機件5);其中,凸輪、活塞、以及汽壓缸是雙接頭機件,機架與滾子是參接頭機件。此機構具有六個雙接頭(ao、b、co、d、e、fo),分別為三個旋轉對(ao、d、fo)、一個滑行對(e)、一個滾動對(co),以及一個凸輪對(b)。此機構的拓樸構造矩陣MTM為:
圖2.17 凸輪-滾子-致動器機構運動鏈 圖2.16 凸輪-滾子-致動器機構
MTM
K R O R
a K A
c b K R
d K P
f e K
F
C
P
C
=
⎡
⎣
⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥
0
0 0
0
0 0
0 0
0
0 0
0
02-18
-
1919機構學 (第二章 機構的組成) 東華書局(YAN-hs/1999)
[例2.2] 汽車懸吊機構,圖2.18。此機構為空間機構,具有六根機件,分別是機架(KF,機件1)、二根連桿 (KL1,
機件2;KL1,機件5)、二個液壓缸(KC1,機件4;KC2,機件6)、以及一個輪軸聯結桿(KX,機件3)。此機構含有七個接頭(ao、b、c、do、e、f、以及go),皆為單接頭;其中接頭ao為旋轉對,接頭b、do、e、以及f是球面對,接頭c和go是滑行對。此機構的拓樸構造矩陣MTM為:
圖2.19 汽車懸吊機構運動鏈 圖2.18 汽車懸吊機構
MTM
K R S P
a K S
b K P S
d c K
e K S
g f K
F
L
X
C
L
C
=
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥⎥
0 0
0 0 0
0 0
0 0 0
0 0 0
0 0 0
0 1
0 1
2
0 2
02-19