産業ロボット向けROS対応オープンソースロボット...
1
産業ロボット向けROS対応オープンソースロボットコントローラ ROSに対応した産業ロボット向けオープンソースロボッ トコントローラ.展示ではROSの軌道計画アプリケー ションMoveIt!を利用しています. 従来のロボットコントローラとオープンソースロボットコントローラ の比較.オープンソースロボットコントローラはROSに対応するこ とで,軌道計画,WebUI,三次元画像処理など様々なモジュールを 利用可能にします. ロボットコントローラ(RC-8) ロボットモーションサーバ(RMS) ソフト安全機能: 指令軸速度,位置指令値 手先速度,手先位置,姿勢 産業ロボット用オープンソース ロボットコントローラ(IPC-8) RC-8計算機(Corei7) ROSモーションコントローラ(RMC) ロボットハードウェア DENSO b-CAP通信 ロボットペンダント RC-8計算機(Atom) 安 全 信 号 線 E t h e r n e t 通 信 線 軌道計画アプリMoveIt! Webアプリ RWS 概要 オープンソースソフトウェアは,短期間で質の高いソフトウェアを構築するための方法論として,OS, プログラム環境,アプリケーション等コンピュータサイエンスの分野で広く受け入れられています.ロ ボット研究分野でもROS(RobotOperatingSystem)を代表に,オープンソースロボティクスが大きな ムーブメントになりつつあります. 本展示では,大量・高品質の再利用可能なROS対応の知能ロボットモジュール群を産業ロボット 分野でも活用するために,オープンソース対応の産業ロボット用コントローラを紹介しています. 従来の産業用ロボット分野における「コントローラ」は電源管理からユーザインタフェースまで含ん だ統一的な統合システムが一般的でしたが、開発したオープンソースのロボットコントローラは軌道 補間を司るモーションコントローラとサーボループを主とし,ROSの標準的なインターフェースに対 応することで知能ロボット研究分野で開発が進んでいる様々な知的モジュールの取り込みを狙って います. なお,本展示内容は文部科学省・大学発新産業創出拠点プロジェクト「知能ロボットソフトウェア の産業展開によるオープンイノベーション拠点の創出」の支援で東京大学情報システム工学研究室 が研究開発しました.開発したソフトウェアはhttp://github.com/start-jskで公開しています.興味 のある方はstart@jsk.imi.i.u-tokyo.ac.jpにご連絡下さい. 安全 性 提案するシステム構成は従来のロボットコントロー ラが稼働するRC-8とロボットに対し,外部の産業用 計算機(IPC-8)にインストールしたオープンソースロ ボットコントローラを稼働させている.RC-8側でソフ トとハードの安全機構が確保されており,オープン ソースコントローラ側の誤指令,誤動作に対処できる 構成になっています. ROS アプリケーション ROSコミュニテイで開発されているソフト ウェとの接続例として,以下に示す軌道計画 アプリMoveItとの接続や,WebUIインター フェースRobotWebTools(RWS)を使った応 用を紹介しています. 事 業 化 本展示システムの商品化は(社)東京オー プンソースロボティクス協会で進めておりま す.ご興味がある方はご連絡下さい. info@opensource-robotics.tokyo.jp 従来ロボットコントローラ UI 軌道生成 サーボループ モータドライバ 電源管理 ロボットコントローラ サーボループ モータドライバ 電源管理 モーションコントローラ モーションコントローラ ユーザインターフェース Web連携 自己干渉回避 障害物回避軌道生成 三次元画像処理 キャリブレーション ハード(A社) モータドライバ 電源管理 ハード(B社) モータドライバ 電源管理 ハード(C社) HAL (Hardware Abstraction Layer) 標準ROSロボットインターフェース ROSアプリ群
Transcript of 産業ロボット向けROS対応オープンソースロボット...

産業ロボット向けROS対応オープンソースロボットコントローラ
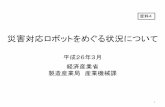
ROSに対応した産業ロボット向けオープンソースロボットコントローラ.展示ではROSの軌道計画アプリケーションMoveIt!を利用しています.
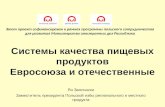
従来のロボットコントローラとオープンソースロボットコントローラの比較.オープンソースロボットコントローラはROSに対応することで,軌道計画,WebUI,三次元画像処理など様々なモジュールを利用可能にします.
ロボットコントローラ(RC-8)
ロボットモーションサーバ(RMS)ソフト安全機能: 指令軸速度,位置指令値 手先速度,手先位置,姿勢
産業ロボット用オープンソースロボットコントローラ(IPC-8)
RC-8計算機(Corei7)
ROSモーションコントローラ(RMC)
ロボットハードウェア
DENSO b-CAP通信
ロボットペンダント
RC-8計算機(Atom)
安全
信号
線E
the
rne
t通信
線
軌道計画アプリMoveIt! Webアプリ RWS
概要 オープンソースソフトウェアは,短期間で質の高いソフトウェアを構築するための方法論として,OS,プログラム環境,アプリケーション等コンピュータサイエンスの分野で広く受け入れられています.ロボット研究分野でもROS(RobotOperatingSystem)を代表に,オープンソースロボティクスが大きなムーブメントになりつつあります. 本展示では,大量・高品質の再利用可能なROS対応の知能ロボットモジュール群を産業ロボット分野でも活用するために,オープンソース対応の産業ロボット用コントローラを紹介しています. 従来の産業用ロボット分野における「コントローラ」は電源管理からユーザインタフェースまで含んだ統一的な統合システムが一般的でしたが、開発したオープンソースのロボットコントローラは軌道補間を司るモーションコントローラとサーボループを主とし,ROSの標準的なインターフェースに対応することで知能ロボット研究分野で開発が進んでいる様々な知的モジュールの取り込みを狙っています.
なお,本展示内容は文部科学省・大学発新産業創出拠点プロジェクト「知能ロボットソフトウェアの産業展開によるオープンイノベーション拠点の創出」の支援で東京大学情報システム工学研究室が研究開発しました.開発したソフトウェアはhttp://github.com/start-jskで公開しています.興味のある方は[email protected]にご連絡下さい.
安全性 提案するシステム構成は従来のロボットコントローラが稼働するRC-8とロボットに対し,外部の産業用計算機(IPC-8)にインストールしたオープンソースロボットコントローラを稼働させている.RC-8側でソフトとハードの安全機構が確保されており,オープンソースコントローラ側の誤指令,誤動作に対処できる構成になっています.
ROSアプリケーション ROSコミュニテイで開発されているソフトウェとの接続例として,以下に示す軌道計画アプリMoveItとの接続や,WebUIインターフェースRobotWebTools(RWS)を使った応用を紹介しています.
事業化 本展示システムの商品化は(社)東京オープンソースロボティクス協会で進めております.ご興味がある方はご連絡下さい.[email protected]
従来ロボットコントローラ
UI
軌道生成
サーボループ
モータドライバ
電源管理
ロボットコントローラ
サーボループ
モータドライバ
電源管理
モーションコントローラ モーションコントローラ
ユーザインターフェースWeb連携
自己干渉回避
障害物回避軌道生成
三次元画像処理
キャリブレーション
ハード(A社)
モータドライバ
電源管理
ハード(B社)
モータドライバ
電源管理
ハード(C社)
HAL (Hardware Abstraction Layer)
標準ROSロボットインターフェース
ROSアプリ群