安川産業用ロボット MOTOMAN-PXシリーズ安川産業用ロボット 用途:塗装...
14
安川産業用ロボット 用途:塗装 可搬質量 3/10/15/20kg 6軸垂直多関節形 YASKAWA 資料番号 KA-C945-465C MOTOMAN - PXシリーズ 品質及び環境マネージメント システムの国際規格 ISO9001, ISO14001を取得しています。 JQA-EM0924 JQA-0813 R009 QMS Accreditation
Transcript of 安川産業用ロボット MOTOMAN-PXシリーズ安川産業用ロボット 用途:塗装...

安川産業用ロボット
用途:塗装 可搬質量 3/10/15/20kg 6軸垂直多関節形
YASKAWA
資料番号 KA-C945-465C
MOTOMAN-PXシリーズ
品質及び環境マネージメントシステムの国際規格 ISO9001,ISO14001を取得しています。
JQA-EM0924JQA-0813R009QMS Accreditation
Paul Hsueh
文字方塊
台中:886-4-23588755 台南:886-6-2709257 北京:010-64882666轉8008 北應機:010-64985309 天津:022-58853955 上海:021-64839459 昆山:0512-57458588 寧波:0574-87791683 廈門:0592-6074228 東莞:0769-85415416 南海:0757-81139110 重慶:023-67700577
Paul Hsueh
印章
Paul Hsueh
文字方塊
台灣省新北市土城區忠承路83號9樓 電話:886 2 2268-4088 傳真:886 2 2268-4086 網址:http://www.bfcoating.com 邮箱:[email protected]
Paul Hsueh
印章

2
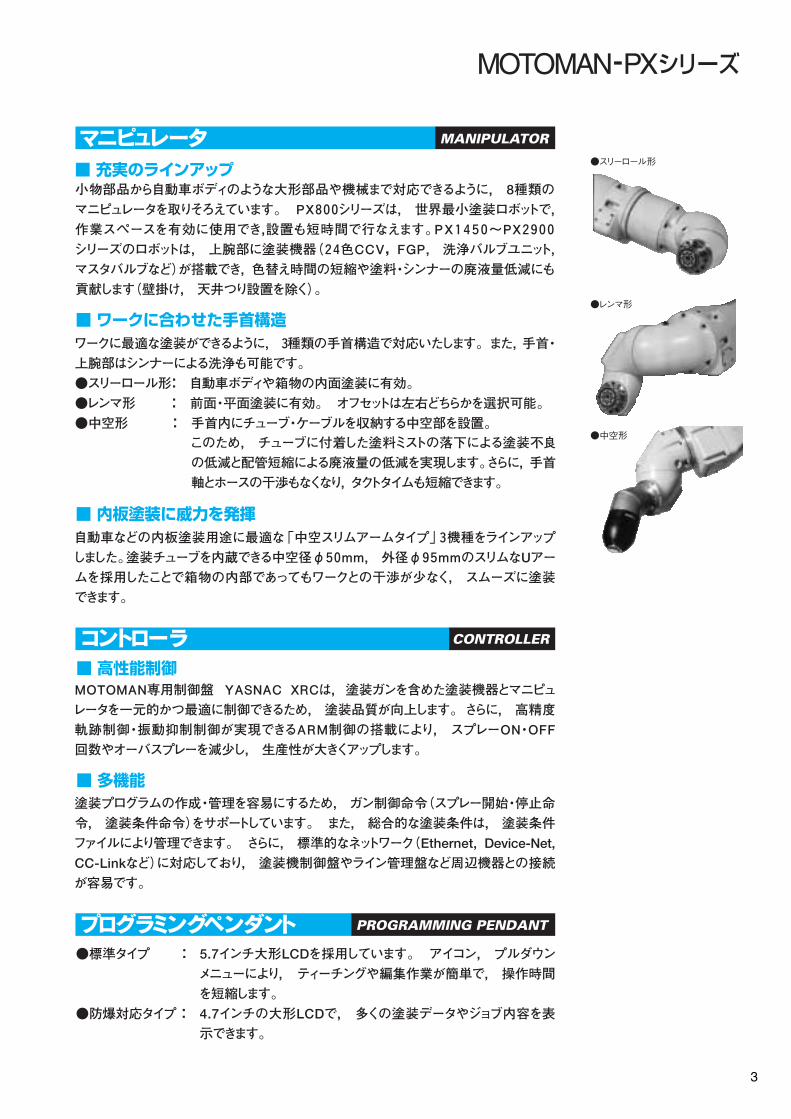
ワークに最適な塗装ができるように, 3種類の手首構造で対応いたします。 また, 手首・
上腕部はシンナーによる洗浄も可能です。
●スリーロール形: 自動車ボディや箱物の内面塗装に有効。
●レンマ形 : 前面・平面塗装に有効。 オフセットは左右どちらかを選択可能。
●中空形 : 手首内にチューブ・ケーブルを収納する中空部を設置。
コントローラ
プログラミングペンダント●標準タイプ :
●防爆対応タイプ :
5.7インチ大形LCDを採用しています。 アイコン, プルダウン
メニューにより, ティーチングや編集作業が簡単で, 操作時間
を短縮します。
4.7インチの大形LCDで, 多くの塗装データやジョブ内容を表
示できます。
■ 充実のラインアップ 小物部品から自動車ボディのような大形部品や機械まで対応できるように, 8種類の
マニピュレータを取りそろえています。 PX800シリーズは, 世界最小塗装ロボットで,
作業スペースを有効に使用でき,設置も短時間で行なえます。PX1450~PX2900
シリーズのロボットは, 上腕部に塗装機器(24色CCV, FGP, 洗浄バルブユニット,
マスタバルブなど)が搭載でき, 色替え時間の短縮や塗料・シンナーの廃液量低減にも
貢献します(壁掛け, 天井つり設置を除く)。
■ ワークに合わせた手首構造
自動車などの内板塗装用途に最適な「中空スリムアームタイプ」3機種をラインアップ
しました。塗装チューブを内蔵できる中空径φ50mm, 外径φ95mmのスリムなUアームを採用したことで箱物の内部であってもワークとの干渉が少なく, スムーズに塗装
できます。
■ 内板塗装に威力を発揮
このため, チューブに付着した塗料ミストの落下による塗装不良
の低減と配管短縮による廃液量の低減を実現します。さらに, 手首
軸とホースの干渉もなくなり, タクトタイムも短縮できます。
MOTOMAN専用制御盤 YASNAC XRCは, 塗装ガンを含めた塗装機器とマニピュ
レータを一元的かつ最適に制御できるため, 塗装品質が向上します。 さらに, 高精度
軌跡制御・振動抑制制御が実現できるARM制御の搭載により, スプレーON・OFF
回数やオーバスプレーを減少し, 生産性が大きくアップします。
塗装プログラムの作成・管理を容易にするため, ガン制御命令(スプレー開始・停止命
令, 塗装条件命令)をサポートしています。 また, 総合的な塗装条件は, 塗装条件
ファイルにより管理できます。 さらに, 標準的なネットワーク(Ethernet, Device-Net,
CC-Linkなど)に対応しており, 塗装機制御盤やライン管理盤など周辺機器との接続
が容易です。
■ 高性能制御
■ 多機能
マニピュレータ
3

Manipulator
手首先端フランジ
小形塗装ロボット
■標準仕様
■外形寸法及び動作範囲 単位:mm ■外形寸法及び動作範囲 単位:mm
小形塗装ロボット (スリーロール形)
S軸(旋回)L軸(下腕)U軸(上腕)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
S軸L軸U軸R軸B軸T軸R軸B軸T軸R軸B軸T軸
最大速度
リスト許容
モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX800
垂直多関節形(6自由度)3kg
±0.03mm±60°(床置き,天吊り時は±170°)
+150°,-45°+190°,-70°±165°±135°±350°
2.62rad/s,150°/s2.09rad/s,120°/s3.40rad/s,195°/s5.23rad/s,300°/s5.23rad/s,300°/s7.33rad/s,420°/s
5.39N・m5.39N・m2.94N・m0.1kg・m2
0.1kg・m2
0.03kg・m2
42kg床置き,壁掛け,天吊り
1.5kVA*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
■標準仕様
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX1450
YR-PX1450-A20(国内仕様)
YR-PX1450-B20(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm
±90°(壁掛け時は±27.5°)+100°,-50°6~163°±260°±140°±260°2.0m/s34.1N・m34.1N・m9.8N・m1.21kg・m2
1.21kg・m2
0.10kg・m2
345kg床置き,壁掛け,天吊り
5kVA
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
φ5H7 穴深さ7
手首先端フランジ
1253
295 958
310
12
561
P点
87 100
70°
150
320
767320 6770
150°
45°
60°
771
1202
561 87
(注)
4-M5XP0.8 タップ深さ9
45°
P.C.D.31.5
60° 60°
R798 R3
30
(注)この範囲で長時間姿勢を保持すると,サーボアラームが発生する場合があります。詳細はマニピュレータ取扱説明書を参照してください。
YR-PX800-A02(国内仕様)
YR-PX800-B00(FM仕様)
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
P点
R623
R14
57
90゚90゚
R586
2914
P点動作範囲
P点
6110164411457
50゚ 6゚
100゚
1757
1818
234500300
163゚
6゚
154゚
245
600
600
1542
±260°±140°
±260°
8-M6タップ 深さ9
P.C
.D.3
2
4

Manipulator
手首先端フランジ
■外形寸法及び動作範囲 単位:mm
小形塗装ロボット (レンマ形)
■標準仕様
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX1450
YR-PX1450-A30(国内仕様)
YR-PX1450-B30(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm
±90°(壁掛け時は±27.5°)+100°,-50°6~163°±260°±270°±260°2.0m/s30.4N・m19.6N・m9.8N・m0.97kg・m2
0.40kg・m2
0.10kg・m2
360kg床置き,壁掛け,天吊り
5kVA
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
8-M6XP1.0 タップ深さ9
P.C.D.32
φ45(回転部外径)
手首先端フランジ
3670
±90°
■外形寸法及び動作範囲 単位:mm
小形塗装ロボット (スリーロール形)
■標準仕様
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX1850
YR-PX1850-A20(国内仕様)
YR-PX1850-B20(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm±90°
+100°,-50°6~163°±260°±140°±260°2.0m/s34.1N・m34.1N・m9.8N・m1.21kg・m2
1.21kg・m2
0.10kg・m2
360kg床置き,壁掛け
5kVA
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
1375 460
100゚
50゚
2532
±140゚
392
397
2135
1835
6゚~163゚
±260° ±260°
640
365
850 19493
275
1583
8824
565
060
0
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
P点
R623
R14
57
1652914
90゚
R586
90゚
±260°
±260°
20°
±270°
P点
P点動作範囲
500300 93
163゚
1757
141.
5
1818
61
154°
6゚
100゚
40゚
154゚
50゚
6゚
441 1016
1457
245
600
1542
600
P.C
.D.3
2
8-M6タップ 深さ9
5

Manipulator
165
3670
±90°
8-M6XP1.0 タップ深さ9
P.C.D.32
φ45(回転部外径)
手首先端フランジ
2532
1395 440
6°~163°
100°
50°
397
2135
1835 392
±260°
±270°
±260°
640
365
850
1583
194
88
245
141.5
93
650
275
600
小形塗装ロボット (レンマ形)
■標準仕様
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
■外形寸法及び動作範囲 単位:mm
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX1850
YR-PX1850-A30(国内仕様)
YR-PX1850-B30(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm±90°
+100°,-50°6~163°±260°±270°±260°2.0m/s30.4N・m19.6N・m9.8N・m0.97kg・m2
0.40kg・m2
0.10kg・m2
360kg床置き,壁掛け
5kVA
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
8-M6XP1.0 タップ深さ9
P.C.D.32
φ45(回転部外径)
手首先端フランジ
±90°
4070
■標準仕様
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
■外形寸法及び動作範囲 単位:mm
中形塗装ロボット (スリーロール形)
5゚~163゚
100゚
50゚
±140゚
5751460
2767 23
3543
2
5452035
±260°±260°
850 19493
640
275 365
600
850
8824
5
1783
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
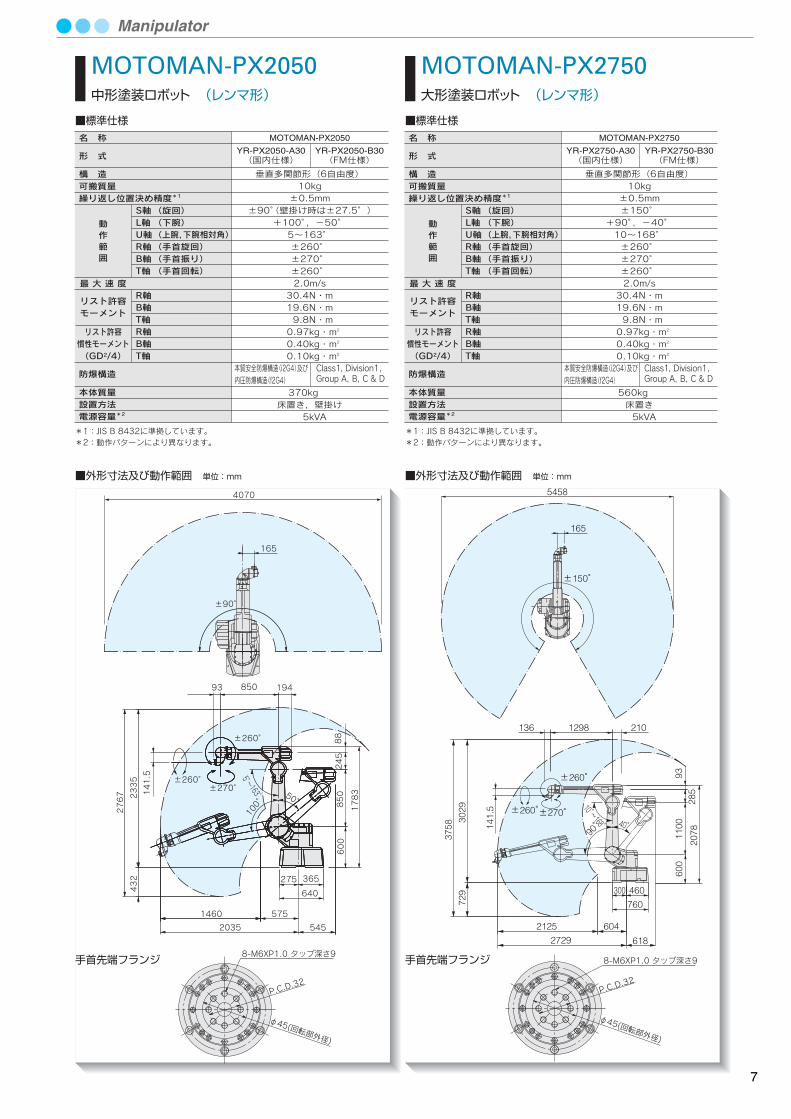
MOTOMAN-PX2050
YR-PX2050-A20(国内仕様)
YR-PX2050-B20(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm
±90°(壁掛け時は±27.5°)+100°,-50°5~163°±260°±140°±260°2.0m/s34.1N・m34.1N・m9.8N・m1.21kg・m2
1.21kg・m2
0.10kg・m2
370kg床置き,壁掛け
5kVA
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
6
Manipulator
■標準仕様
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
■外形寸法及び動作範囲 単位:mm
中形塗装ロボット (レンマ形)
165
±90°
4070
■外形寸法及び動作範囲 単位:mm
大形塗装ロボット (レンマ形)
■標準仕様
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
±260°
1460
5°~163°
2767
432
2335
50°
100°
575
5452035
±270°±260°
141.5
850
640
275 365
600
850
194
88
245
93
1783
8-M6XP1.0 タップ深さ9
P.C.D.32
φ45(回転部外径)
手首先端フランジ 8-M6XP1.0 タップ深さ9
P.C.D.32
φ45(回転部外径)
手首先端フランジ
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX2050
YR-PX2050-A30(国内仕様)
YR-PX2050-B30(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm
±90°(壁掛け時は±27.5°)+100°,-50°5~163°±260°±270°±260°2.0m/s30.4N・m19.6N・m9.8N・m0.97kg・m2
0.40kg・m2
0.10kg・m2
370kg床置き,壁掛け
5kVA
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX2750
YR-PX2750-A30(国内仕様)
YR-PX2750-B30(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm±150°
+90°,-40°10~168°±260°±270°±260°2.0m/s30.4N・m19.6N・m9.8N・m0.97kg・m2
0.40kg・m2
0.10kg・m2
560kg床置き5kVA
±150°
165
5458
2729
3758
3029
2125 604
40°90°
10°~168°
35
±260°±270°
±260°
729
618
210
2078
93
760
300 460
285
136 1298
600
110014
1.5
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
7

Manipulator
■外形寸法及び動作範囲 単位:mm ■外形寸法及び動作範囲 単位:mm
大形塗装ロボット (スリーロール形) 大形塗装ロボット (中空形)
■標準仕様
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
5658
±150°
■標準仕様
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
5668
±150°
8-M6XP1.0 タップ深さ9
P.C.D.32
φ45(回転部外径)
手首先端フランジ 手首先端フランジ
760
300 460
600
310
1100
75
2085
35
3968
10°~168°
3134
834
40゚
90゚
2834
2334 500
618
±360°±360°
±360°
160 1400 209
142
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX2850
YR-PX2850-A20(国内仕様)
YR-PX2850-B20(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm±150°
+90°,-40°10~168°±260°±140°±260°2.0m/s34.1N・m34.1N・m9.8N・m1.21kg・m2
1.21kg・m2
0.10kg・m2
570kg床置き5kVA
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
MOTOMAN-PX2850
YR-PX2850-A10(国内仕様)
YR-PX2850-B10(FM仕様)
垂直多関節形(6自由度)10kg±0.5mm±150°
+90°,-40°5~168°
±360°(ただしR軸+T軸:±360°以下)±360°
±360°(ただしR軸+T軸:±360°以下)2.0m/s30.4N・m19.6N・m9.8N・m0.97kg・m2
0.40kg・m2
0.10kg・m2
570kg床置き5kVA
±140°
3958
35
10°~168°
3129
829
40゚90゚
28292275 554
618
±260°±260°
760300 460
2078
600
285
1100
93
234.2 1400 210
2-φ4ピン
φ43(中空穴)P.C.D.105
φ118.5(回転
部外径)
22.5゚8-M4×P0.7タップ深さ12
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
8
Controller
大形塗装ロボット (中空形)
■標準仕様
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
S軸L軸U軸R軸B軸T軸R軸B軸T軸R軸B軸T軸
最大速度
リスト許容
モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*1
防爆構造
本体質量設置方法電源容量*2
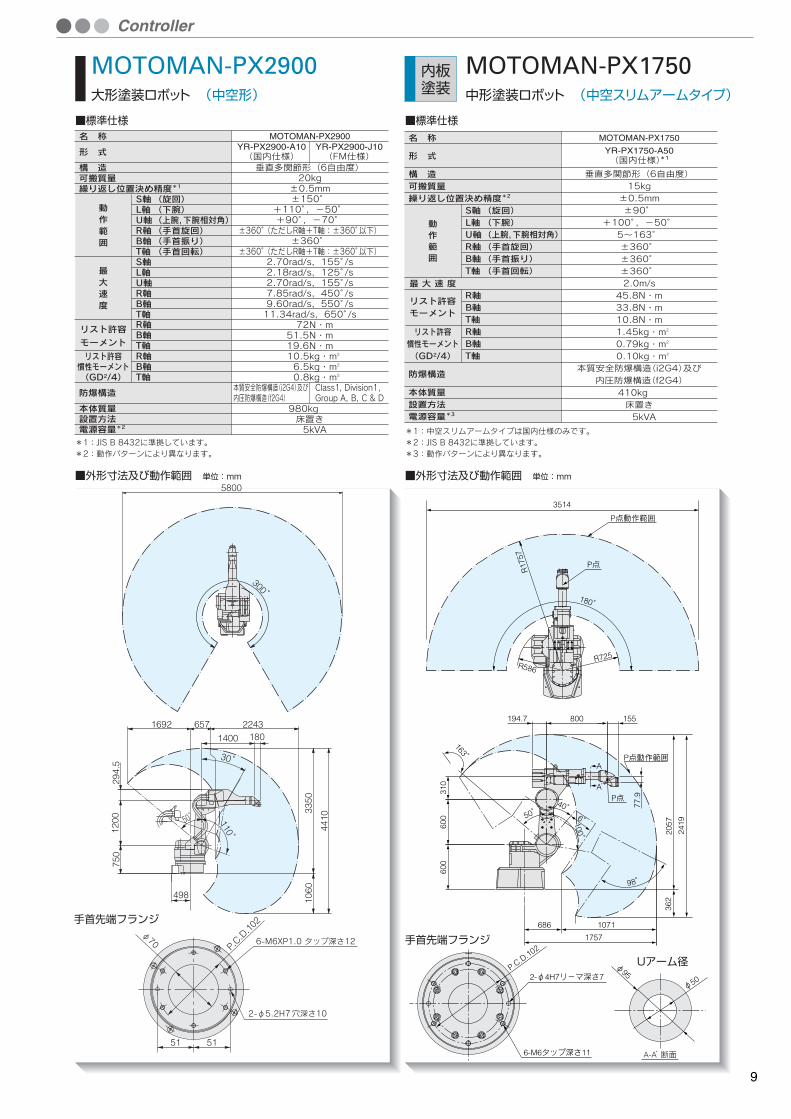
MOTOMAN-PX2900
垂直多関節形(6自由度)20kg±0.5mm±150°
+110°,-50°+90°,-70°
±360°(ただしR軸+T軸:±360°以下)±360°
±360°(ただしR軸+T軸:±360°以下)2.70rad/s,155°/s2.18rad/s,125°/s2.70rad/s,155°/s7.85rad/s,450°/s9.60rad/s,550°/s11.34rad/s,650°/s
72N・m51.5N・m19.6N・m10.5kg・m2
6.5kg・m2
0.8kg・m2
980kg床置き5kVA
*1:JIS B 8432に準拠しています。*2:動作パターンにより異なります。
■外形寸法及び動作範囲 単位:mm5800
手首先端フランジ
300゚
30゚
110゚
50゚
140022436571692
180
498
294.
512
0075
0
3350
4410
1060
5151
P.C.
D.10
2φ70 6-M6XP1.0 タップ深さ12
2-φ5.2H7穴深さ10
YR-PX2900-A10(国内仕様)
YR-PX2900-J10(FM仕様)
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
Class1, Division1,Group A, B, C & D
■外形寸法及び動作範囲 単位:mm
中形塗装ロボット (中空スリムアームタイプ)
■標準仕様
*1:中空スリムアームタイプは国内仕様のみです。*2:JIS B 8432に準拠しています。*3:動作パターンにより異なります。
手首先端フランジ
Uアーム径
A-A 断面
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*2
防爆構造
本体質量設置方法電源容量*3
MOTOMAN-PX1750
YR-PX1750-A50(国内仕様)*1
垂直多関節形(6自由度)15kg±0.5mm±90°
+100°,-50°5~163°±360°±360°±360°2.0m/s45.8N・m33.8N・m10.8N・m1.45kg・m2
0.79kg・m2
0.10kg・m2
410kg床置き5kVA
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
内板 塗装
P点R17
57P点動作範囲
180°
R586R725
3514
P点
P点動作範囲
77.9
686 1071
1757
2057
2419
362
155194.7
98°
163°
6°100°
800
600
600
310
50°40°
P.C.D.102
2-φ4H7リ-マ深さ7
6-M6タップ深さ11
φ95
φ50
A
A
9

Manipulator
■外形寸法及び動作範囲 単位:mm ■外形寸法及び動作範囲 単位:mm
中形塗装ロボット (中空スリムアームタイプ) 大形塗装ロボット (中空スリムアームタイプ)
■標準仕様
*1:中空スリムアームタイプは国内仕様のみです。*2:JIS B 8432に準拠しています。*3:動作パターンにより異なります。
■標準仕様
*1:YR-PX2850-A60は,ソレノイド用内圧ケース付きになります。*2:中空スリムアームタイプは国内仕様のみです。*3:JIS B 8432に準拠しています。*4:動作パターンにより異なります。
手首先端フランジ 手首先端フランジ Uアーム径 Uアーム径
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*2
防爆構造
本体質量設置方法電源容量*3
MOTOMAN-PX2050
YR-PX2050-A50(国内仕様)*1
垂直多関節形(6自由度)15kg±0.5mm±90°
+100°,-50°5~163°±360°±360°±360°2.0m/s45.8N・m33.8N・m10.8N・m1.45kg・m2
0.79kg・m2
0.10kg・m2
420kg床置き5kVA
S軸(旋回)L軸(下腕)U軸(上腕,下腕相対角)R軸(手首旋回)B軸(手首振り)T軸(手首回転)
動作範囲
R軸B軸T軸R軸B軸T軸
最 大 速 度
リスト許容モーメント
リスト許容慣性モーメント(GD2/4)
名 称
形 式
構 造可搬質量繰り返し位置決め精度*3
防爆構造
本体質量設置方法電源容量*4
MOTOMAN-PX2850YR-PX2850-A50 YR-PX2850-A60*1
垂直多関節形(6自由度)15kg±0.5mm±150°
+90°,-40°5~168°±360°±360°±360°2.0m/s45.8N・m33.8N・m10.8N・m1.45kg・m2
0.79kg・m2
0.10kg・m2
床置き5kVA
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
本質安全防爆構造(i2G4)及び内圧防爆構造(f2G4)
107°
93°
35°95°
50°
100°
163° P点動作範囲
2354
2806
452
631 14232054
277
300
365642
77.9
850194.7
310
850
600
180°
R685
P点動作範囲
R20
54
R586
4108
P点
155
φ95
φ50P.C.D.102
2-φ4H7深さ7
6-M6X1.0深さ11
640kg 660kg
R808
90゚40゚
77.9
P点
206.5 213.5
P点
155
P点動作範囲
151225300
210
430
10
A
A
300゚
R638
R28
33
1400
396631
3383
3
168゚108゚
35゚ 5゚
460
750
500 23332834
290
168゚
310
1100
600
P点動作範囲
5666
ソレノイド用内圧ケース
P.C.D
.102
φ50
φ90
2-φ4H7深さ7
6-M6X1.0深さ11
内板 塗装
内板 塗装
A
A
A-A 断面 A-A 断面
(YR-PX2850-A60)
(国内仕様)*2
10

Controller
■制御盤仕様 ■外形寸法 mm
■機能
自立据え置き形,密閉形アプソリュート方式(絶対値エンコーダ)標準メモリ:4MB ,60,000ステップ
10,000ロボット命令専用信号(ハードウェア)入力:11点,出力:2点
汎用信号(標準)入力:40点(内8点は掃気制御用)出力:40点(内8点は掃気制御用)
ユーザ解放点数入力:16点,出力:16点
拡張 I/O基板JANCD-XOI01(最大4枚装着可)(オプション)
メモリカードインタフェース,RS-232C×1ポートFC1/FC2(オプション),PCカードACサーボ用サーボパックソフトウェアサーボ制御0℃~+45℃(運転時) [PPは,0℃~+40℃]
-10℃~+60℃(輸送,保管時)[PPは,0℃~+60℃]最大90%(結露しないこと) [PPは,85%以下]三相AC200/220V(+10%~-15%)50/60Hz(-2%~+2%)電源容量:5kVA(PX800のみ1.5kVA)D種専用接地(接地抵抗100Ω以下)[防爆PP用バリヤは,A種専用接地(接地抵抗10Ω以下)]内圧防爆構造マニピュレータ用の掃気制御部を装備。マンセル記号 5Y7/1相当800(幅)×1,300(高さ)×600(奥行)mm(注)掃気ユニット(幅175mm)及び突起部は含まず。100kg190(幅)×120(高さ)mmモード切替,リモート,サーボオンレディ,スタート,ホールド,非常停止,エディットロック(オプション)全閉形,非防爆仕様強化プラスチック製200(幅)×325(高さ)×77(奥行)mm40文字,12行表示(5.7インチ),バックライト付き全閉形構造,本質安全防爆構造(ExibⅡB:国内安検認定品)強化プラスチック製211(幅)×382(高さ)×75(奥行)mm40文字,12行表示(4.7インチ),バックライトなし
関節,直交/円筒,ツール,ユーザーの各座標系変更,追加,消去(ロボット軸,外部軸を独立に修正可能)3段階+高速ジョグ操作ステップごとの前進・後退,連続送りマニピュレータ動作中,停止中に微調整可能0.01秒単位で可能ダイレクトオープン機能,予約画面機能FC1/FC2,RS-232C×1ポートJIS準拠設定可能ティーチ中はプレイバックパネル操作を許可しないS軸干渉監視(扇状),キューブ域干渉監視(ユーザ座標)アラーム2系統(重故障,軽故障)及びエラーに分散して処置・表示信号と内部コードの受付・表示周辺機器のみ,テストラン可能MCCB開でドアオープン可能制御電源投入時間,サーボ電源投入時間,プレイバック時間,移動時間,作業時間発生中アラームとその内容,及びアラーム経歴模擬出力可能
ツール寸法の自動キャリブレーション
メニューガイド方式ロボット言語:INFORMⅡ関節動作,直線・円弧補間動作,ツール姿勢制御パーセント設定(関節動作),0.1mm/s設定(補間動作),角速度設定(ツール姿勢制御)ジャンプ命令,コール命令,タイマ機能,ロボット停止(一時停止),マニピュレータ動作中にインストラクション実行可能グローバル変数,ローカル変数バイト型,整数型,倍精度型,実数型,位置型ディスクリート入出力,パターン入出力信号処理スプレーオン・オフ命令(アンティシペーション対応),塗装条件出力命令複数ガン対応(最大4ガン)吐出量,パターン,霧化,高電圧出力設定,スプレーディレー時間設定,霧化圧ディレー時間設定3次元シフト,任意設定座標シフト,ミラーシフト,ロボット原点チェック
ジョブ起動テーブル機能,内部登録テーブル機能
コンベヤ静止教示,走行可能
制御盤本体
プレイバックパネル
標 準
防 爆対 応
(オプション)
プログラミング
ペンダント
構 造位置制御方式
メ モ リ 容 量
入 出 力 信 号
インタフェース外部記憶装置ドライブユニット加減速制御方式
周 囲 温 度
相 対 湿 度
電 源
接 地
掃 気 制 御塗 装 色
外 形 寸 法
概 算 質 量外 形 寸 法
装 置 器 具
構 造材 質外 形 寸 法ディスプレイ構 造材 質外 形 寸 法ディスプレイ
座 標 系 選 択教 示 点 修 正ジ ョ グ 操 作軌 跡 確 認速 度 調 整タ イ マ 設 定便 利 機 能インタフェース基本安全対策安全速度制限ティーチロック干渉監視領域自己診断機能ユーザアラームマシンロックドアインタロック
累計稼働時間表示
アラーム表示入出力状態診断ツール定数キャリブレーションプログラミング方式プログラミング言語動 作 機 能
速度設定機能
プ ロ グ ラ ム制 御 命 令変 数変 数 型入 出 力 命 令
塗装機制御命令
塗装特性ファイル
ユーティリティ
自動運転制御
コンベヤ同期
操 作
安全対策
保守用機能
プログラミング機能
その他の機能
感電警告ラベル
サーキットブレーカ
プレイバックパネル
175掃気ユニット
850(460)
1300(900)
固定金具(お客様準備)
ドライバー錠×2
800
381.6(掃気ユニット)
600
(注)( )内寸法はMOTOMAN-PX800用を示します。
専用 制御装置 専用 制御装置
11
■標準仕様 ■外形寸法 mm
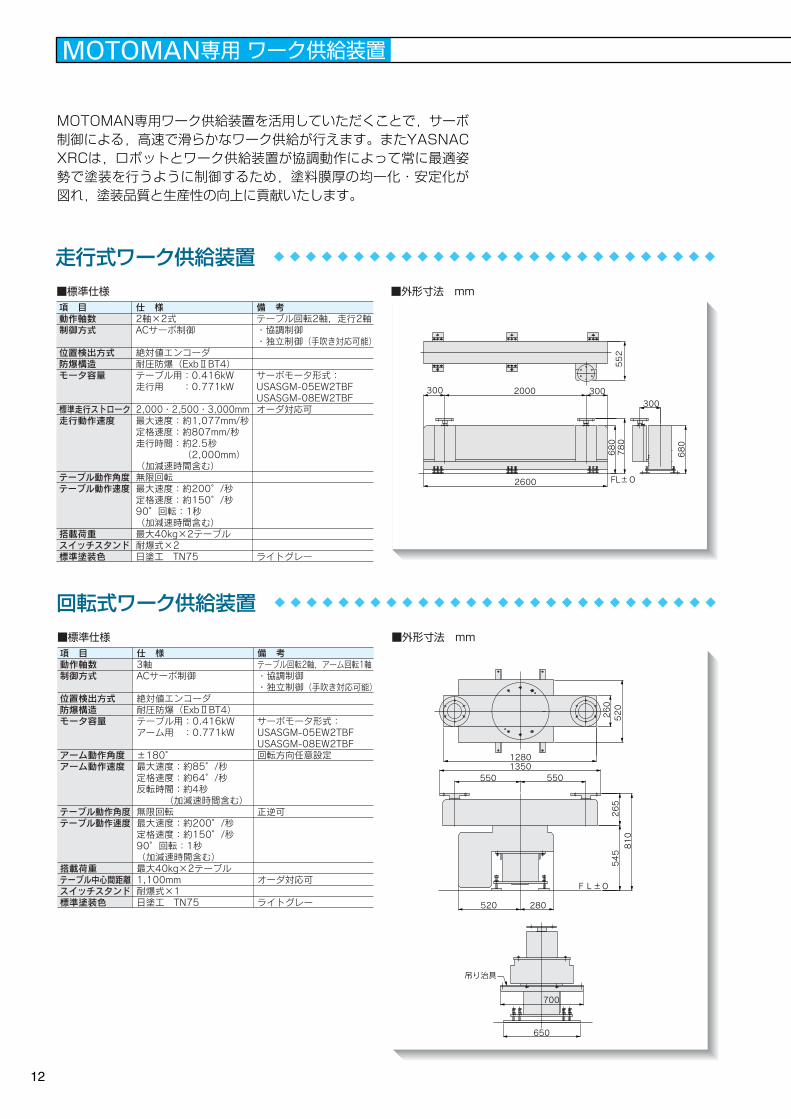
MOTOMAN専用ワーク供給装置を活用していただくことで,サーボ制御による,高速で滑らかなワーク供給が行えます。またYASNAC XRCは,ロボットとワーク供給装置が協調動作によって常に最適姿勢で塗装を行うように制御するため,塗料膜厚の均一化・安定化が図れ,塗装品質と生産性の向上に貢献いたします。
専用 ワーク供給装置
走行式ワーク供給装置 ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆
項 目動作軸数制御方式
位置検出方式防爆構造モータ容量
標準走行ストローク走行動作速度
テーブル動作角度テーブル動作速度
搭載荷重スイッチスタンド標準塗装色
仕 様2軸×2式ACサーボ制御
絶対値エンコーダ耐圧防爆(ExbⅡBT4)テーブル用:0.416kW走行用 :0.771kW
2,000・2,500・3,000mm最大速度:約1,077mm/秒定格速度:約807mm/秒走行時間:約2.5秒
(2,000mm)(加減速時間含む)無限回転最大速度:約200°/秒定格速度:約150°/秒90°回転:1秒(加減速時間含む)最大40kg×2テーブル耐爆式×2日塗工 TN75
備 考テーブル回転2軸,走行2軸・協調制御・独立制御(手吹き対応可能)
サーボモータ形式:USASGM-05EW2TBFUSASGM-08EW2TBFオーダ対応可
ライトグレー
2600
300
780
680
FL±0
680
3002000300
552
■標準仕様
回転式ワーク供給装置 ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆
項 目動作軸数制御方式
位置検出方式防爆構造モータ容量
アーム動作角度アーム動作速度
テーブル動作角度テーブル動作速度
搭載荷重テーブル中心間距離スイッチスタンド標準塗装色
仕 様3軸ACサーボ制御
絶対値エンコーダ耐圧防爆(ExbⅡBT4)テーブル用:0.416kWアーム用 :0.771kW
±180°最大速度:約85°/秒定格速度:約64°/秒反転時間:約4秒
(加減速時間含む)無限回転最大速度:約200°/秒定格速度:約150°/秒90°回転:1秒(加減速時間含む)最大40kg×2テーブル1,100mm耐爆式×1日塗工 TN75
備 考テーブル回転2軸,アーム回転1軸・協調制御・独立制御(手吹き対応可能)
サーボモータ形式:USASGM-05EW2TBFUSASGM-08EW2TBF回転方向任意設定
正逆可
オーダ対応可
ライトグレー
■外形寸法 mm
5505501350
520 280
700
810
545
265
260
520
FL±0
吊り治具
1280
650
12

ロボットとワーク供給装置の組み合わせ例 ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆
Workpiece Feeder
壁掛けロボットと回転式ワーク供給装置による省スペース塗装
連続コンベヤ追従塗装
走行式ワーク供給装置による高効率塗装
XY走行装置付き大形ロボットによる静電ベル塗装
13

C
資料番号 KA-C945-465C
10-4-20無断転載・複製を禁止
2010年 9月 作成 01-3
ご使用の前に取扱説明書とその他の付属書類などをすべて熟読し, 正しくご使用ください。 このカタログに記載の製品は, 一般産業用ロボットMOTOMAN(モートマン)です。 MOTOMANの故障や誤操作が直接人命を脅かしたり, 人体に危害を及ぼすおそれがある用途に使用する場合は, その都度検討が必要ですので当社営業窓口までご照会ください。 本資料中の適用写真は, 分かりやすく説明するために安全さくなど法令法規などで定められた安全のための機器, 装置を取り除いて撮影しています。また, イラストなどはイメージを表現したものです。
・ ・ ・
安全上の ご注意
MOTOMAN-PXシリーズ
11