
capitulo 2 del libro de Análisis Dinámico New
31
CAPÍTULO 2 ANÁLISIS LINEAL DE SISTEMAS DE 1 GDL RESUMEN El Método ߚde Newmark, considera tres modelos para la variación de la aceleración en un sistema de un grado de libertad y son los siguientes: lineal, constante y escalonada. Para cada uno de estos modelos se deducen las ecuaciones de cálculo y al final se generaliza con la variable ߚ. Posteriormente se indica la definición de espectros de respuesta elásticos, los mismos que se hallan con el programa espectro. Pero antes se presenta una breve reseña histórica de este tema, hasta 1960, fundamental para el diseño sísmico de estructuras como es el de los Espectros. Al leer detenidamente cada una de las instrucciones de los programas lineal y espectro se entenderá mejor la forma como se obtiene la respuesta en el tiempo de un sistema de un grado de libertad y como se encuentran los espectros de respuesta elásticos. Por considerarlo muy práctico se presenta también el uso del programa DEGTRA que permite obtener espectros de respuesta elásticos e inelásticos y más aspectos relacionados con la dinámica de estructuras. Luego se ve la importancia de conocer las formas espectrales en base a las condiciones de sitio y a la fuente sísmica; para ello se analizan dos registros obtenidos el uno en suelo blando y el otro en roca en ciudad de México, durante el sismo de 1985 y se comparan sus respectivos espectros. De igual manera se analizan los espectros de los sismos de Chile de 1985 y 2010, destacando la existencia de varios picos de aceleración que causaron gran daño en las estructuras. Se indica también el nuevo espectro del Código emergente de Chile, luego del mega sismo de 2010. Posteriormente se presenta la definición de Pseudo Espectros. Como ejemplo de aplicación se obtiene los Pseudo Espectros de Velocidad y Desplazamiento, a partir del Espectro de Aceleraciones del Código Ecuatoriano de la Construcción, CEC-2000, para el efecto se desarrollo el programa pseudo_espectro. Finalmente, se presenta una forma de obtener acelerogramas sintéticos que son compatibles con el espectro de velocidad y se dan recomendaciones desde el punto de vista práctico de la forma en que se debe proceder para encontrar acelerogramas para hallar la respuesta en el tiempo de una estructura.
-
Upload
jose-gualavisi -
Category
Documents
-
view
45 -
download
4
Transcript of capitulo 2 del libro de Análisis Dinámico New

CAPÍTULO 2
ANÁLISIS LINEAL DE SISTEMAS DE 1 GDL
RESUMEN
El Método de Newmark, considera tres modelos para la variación de la aceleración en un sistema de un grado de libertad y son los siguientes: lineal, constante y escalonada. Para cada uno de estos modelos se deducen las ecuaciones de cálculo y al final se generaliza con la variable .
Posteriormente se indica la definición de espectros de respuesta elásticos, los mismos
que se hallan con el programa espectro. Pero antes se presenta una breve reseña histórica de este tema, hasta 1960, fundamental para el diseño sísmico de estructuras como es el de los Espectros.
Al leer detenidamente cada una de las instrucciones de los programas lineal y
espectro se entenderá mejor la forma como se obtiene la respuesta en el tiempo de un sistema de un grado de libertad y como se encuentran los espectros de respuesta elásticos.
Por considerarlo muy práctico se presenta también el uso del programa DEGTRA que
permite obtener espectros de respuesta elásticos e inelásticos y más aspectos relacionados con la dinámica de estructuras.
Luego se ve la importancia de conocer las formas espectrales en base a las
condiciones de sitio y a la fuente sísmica; para ello se analizan dos registros obtenidos el uno en suelo blando y el otro en roca en ciudad de México, durante el sismo de 1985 y se comparan sus respectivos espectros. De igual manera se analizan los espectros de los sismos de Chile de 1985 y 2010, destacando la existencia de varios picos de aceleración que causaron gran daño en las estructuras. Se indica también el nuevo espectro del Código emergente de Chile, luego del mega sismo de 2010.
Posteriormente se presenta la definición de Pseudo Espectros. Como ejemplo de
aplicación se obtiene los Pseudo Espectros de Velocidad y Desplazamiento, a partir del Espectro de Aceleraciones del Código Ecuatoriano de la Construcción, CEC-2000, para el efecto se desarrollo el programa pseudo_espectro.
Finalmente, se presenta una forma de obtener acelerogramas sintéticos que son
compatibles con el espectro de velocidad y se dan recomendaciones desde el punto de vista práctico de la forma en que se debe proceder para encontrar acelerogramas para hallar la respuesta en el tiempo de una estructura.

ESPECTROS DE RESPUESTA
42
2.1 MÉTODO DE ACELERACIÓN LINEAL EN SISTEMAS DE 1GDL
El Método de Newmark, es un clásico para encontrar la respuesta en el tiempo de un sistema de un grado de libertad, que se estudiará en este apartado, y de grados de libertad, que se verá en otro capítulo. Si 1/6, la variación de la aceleración de la respuesta es de tipo lineal, como se ilustra en la figura 2.1. Antes de proceder a la deducción numérica del método, conviene indicar la ecuación diferencial del movimiento, en el rango elástico, para el caso general.
Donde: , , son la masa, amortiguamiento y rigidez del sistema de un grado de
libertad; es la carga que actúa en el sistema; , , , son el desplazamiento, velocidad y aceleración. Se destaca que tanto como , , son funciones del tiempo . Dependiendo de la forma de Q se puede pensar en tener una solución analítica exacta, si es que es factible pero para el caso sísmico lo más fácil es pensar en una solución aproximada que se cumpla únicamente en ciertos puntos discretos, en este caso la ecuación (2.1) toma la forma siguiente:
Para el tiempo discreto 1, se tiene:
Si se resta estas dos últimas ecuaciones se tiene:
Δ Δ Δ Δ
Donde:
Δ Δ Δ ∆
Figura 2.1 Deducción del Método de Aceleración Lineal
Para el caso de aceleración lineal, se debe determinar la ecuación de la recta de la
figura 2.1, para cuando el tiempo . Sea la pendiente de esta recta. (Lamar, 1981).
Δ∆
(2.1)
(2.2)
(2.3)

ROBERTO AGUIAR FALCONI CEINCI-ESPE
43
La ecuación de una recta que pasa por un punto dado es:
Δ∆
Δ∆
Al integrar la ecuación (2.4) entre el tiempo y un tiempo cualquiera que se
encuentre dentro del intervalo indicado en la figura 2.1, se tiene:
Δ∆
Δ∆
2
Para el tiempo se tiene:
= ∆∆
∆ ∆ ∆ ∆2
Ahora, al integrar la ecuación (2.5) se obtiene en primer lugar la ecuación que
proporciona el desplazamiento para el intervalo ; luego se halla el desplazamiento en 1 y finalmente el incremento de desplazamientos ∆ .
Δ∆
2
2Δq∆
6
El desplazamiento en 1 vale:
∆ ∆
2 ∆ ∆
6 De donde:
∆ ∆ ∆
2 ∆ ∆
6
Ahora al reemplazar los incrementos de velocidad y desplazamiento en la ecuación (2.2) se tiene:
∆ ∆ ∆2 ∆ ∆
∆2
∆ ∆6 ∆
2 ∆ ∆6 ∆ ∆ ∆ ∆ 2 ∆
Sea la masa equivalente del sistema, definida de la siguiente manera:
(2.4)
(2.5)
(2.6)
(2.7)

ESPECTROS DE RESPUESTA
44
2 ∆ ∆6
Por otro lado, sea ∆ el vector que contiene al incremento de cargas.
∆ ∆ ∆ ∆2 ∆
De donde el incremento de aceleración se halla dividiendo el incremento de carga para
la masa equivalente del sistema.
∆ ∆
• Procedimiento de cálculo
i. Se determina la masa equivalente del sistema
2 ∆ ∆6
ii. Se halla el incremento de carga ∆
∆ ∆ ∆ ∆2 ∆
∆
. iii. Se halla el incremento de aceleraciones ∆
∆ ∆
iv. Se encuentra el incremento de velocidad ∆
∆ ∆ ∆ ∆2
v. Se determina el incremento de desplazamiento
∆ ∆ ∆
2 ∆ ∆
6
vi. Se obtiene el nuevo desplazamiento, velocidad y aceleración en
∆ ∆ ∆
vii. Los valores obtenidos en el tiempo se asignan a para el siguiente ciclo
Dentro de un lazo, este último paso es automático. Para un nuevo incremento de tiempo se repite desde el paso dos. Es importante destacar que en el Análisis Lineal, la masa equivalente se determina una sola vez.
(2.8)
(2.9)
(2.10)

ROBERTO AGUIAR FALCONI CEINCI-ESPE
45
• EJEMPLO 1
La estructura de un piso, indicada en la figura 2.2, ha sido modelada como un sistema de un grado de libertad; tiene una masa 10 kg s2/cm; una rigidez 1000 kg/cm; un factor de amortiguamiento 0.1. Está sometida al pulso rectangular de 2500 kg., que tiene una duración de 0.5 seg. Con los datos indicados el amortiguamiento 20 kg/cm. Si las condiciones iniciales de desplazamiento y velocidad son nulas se pide:
1. Aplicando el Método de aceleración lineal con un Δ 0.05 ., presentar en una tabla,
los cálculos hasta un tiempo de 0.15 seg. 2. Calcular en forma analítica empleando la respuesta estudiada en el capítulo
anterior y comparar los resultados con el método de aceleración lineal para ∆ 0.05s 3. Comparar las 2 respuestas analítica y con el método de aceleración lineal para un
∆ 0.01 .
Figura 2.2 Sistema de un grado de libertad sometida a un pulso rectangular.
• SOLUCIÓN
Para 0, se tiene que el desplazamiento y velocidad son cero pero no la aceleración
ya que hay una fuerza de 2500 kg.
10 2500 250 cm/s2.
1. Tabla de cálculo
En la tabla 2.1 se presenta el cálculo hasta 0.15 s., y tiene por objetivo que el lector compruebe los valores presentados.
Tabla 2.1 Resultados hasta 0.15 s.
(s.)
∆ (kg.)
∆ (cm/s2)
(cm/s2)
∆ (cm/s)
(cm/s)
∆ (cm)
(cm)
0.00 -562.50 -51.5267 250.00 11.2118 0 0.2910 0 0.05 -1007.15 -92.2586 198.4733 7.6172 11.2118 0.7702 0.2910 0.10 -1180.43 -108.1314 106.2147 2.6074 18.8290 1.0292 1.0613 0.15 -1067.51 -97.7873 -1.9167 -2.5405 21.4365 1.0287 2.0904
2. Respuesta analítica
Para un pulso rectangular la respuesta en el tiempo, es la siguiente:
0
Para el presente ejemplo 0.5 .; 2500 . Para el caso sub amortiguado, la
respuesta vale:

ESPECTROS DE RESPUESTA
46
1
1 exp cos 1
Reemplazando valores se tiene:
= 10
1 = 9,9499 1/s.
1 0.1005
Para 0.5
25001000 1 exp cos 9.9499 0.1005 9.9499
Para 0.5
2.5 1 exp cos 9.9499 0.1005 9.9499
2.5 1 exp 0.5 cos 9.9499 0.5 0.1005 9.9499 0.5
En la figura 2.3 se presenta la respuesta en forma analítica y la hallada con el método
de la aceleración lineal para un ∆ 0.05 . Se aprecia que la aproximación que se halla con el método de aceleración lineal es bastante buena.
Figura 2.3 Comparación de respuestas: Solución analítica y aceleración lineal con ∆ 0.05 .

ROBERTO AGUIAR FALCONI CEINCI-ESPE
47
3. Comparación de Respuestas: Analítica y con Aceleración Lineal para ∆ 0.01 .
Cuando el ∆ tiende a cero la respuesta hallada con el método de aceleración lineal
(métodos numéricos) se aproxima muy bien a la respuesta analítica exacta y esto se debe a que se tiene una mayor cantidad de puntos discretos en los cuales se cumple la ecuación diferencial.
En La figura 2.4 se presenta la respuesta en el tiempo hallada con la solución analítica exacta y la que se encuentra con el método de la aceleración lineal para ∆ 0.01 . Prácticamente coinciden las dos curvas.
Figura 2.4 Comparación de respuestas: Solución analítica y aceleración lineal con ∆ 0.01 .
2.2 MÉTODO DE ACELERACIÓN CONSTANTE
El método de aceleración constante, considera que la respuesta de aceleraciones, en el intervalo de tiempo y es constante, como se presenta en la figura 2.5; en este caso la ecuación de la aceleración para un tiempo es:
∆2
Para encontrar la ecuación que define la velocidad en el intervalo, se debe derivar la
ecuación de aceleraciones.
∆2
(2.11)

ESPECTROS DE RESPUESTA
48
∆2
Al encontrar la velocidad en y recordando que ∆ , y la ecuación de ∆ se tiene:
∆ ∆ ∆2 ∆
Figura 2.5 Modelo de aceleración constante para la respuesta en el tiempo.
Ahora al integrar la ecuación (2.12) se encuentra la ecuación que define el
desplazamiento pero antes escribamos de nuevo esa ecuación pasando el término al lado derecho.
∆2
2 ∆2
2
De donde:
∆ ∆ ∆
2 ∆ ∆
4
Al reemplazar (2.13) y (2.14) en la ecuación diferencial escrita en forma incremental, definida en (2.2) se obtiene:
2 ∆ ∆4 ∆ ∆ ∆ ∆
∆2
De tal manera, que en el Método de Aceleración Constante, cambian las siguientes
ecuaciones
(2.12)
(2.13)
(2.14)
(2.15)

ROBERTO AGUIAR FALCONI CEINCI-ESPE
49
2 ∆ 4 ∆
∆ ∆ ∆
2 ∆ ∆
4
2.3 MÉTODO DE ACELERACIÓN ESCALONADA
En la figura 2.6 se presenta la variación de aceleración para el método de aceleración escalonada. Nótese que el punto medio entre el intervalo y se ha denominado , de tal manera que ∆ /2 = . Básicamente se tienen dos ecuaciones para la variación de la aceleración y son:
• Para
• Para
Figura 2.6 Variación escalonada de la aceleración.
Por lo tanto se debe trabajar en los dos intervalos de aceleración, y en el primer
intervalo se debe determinar la velocidad y desplazamientos en . A continuación se presenta el desarrollo numérico para el primer intervalo, como se lo ha realizado en los otros apartados.
• Para
(2.16)
(2.17)

ESPECTROS DE RESPUESTA
50
Para
∆2
Ahora se debe integrar la ecuación (2.17) para encontrar el desplazamiento.
2
Para
∆2
∆8
• Para
Al reemplazar la velocidad en el tiempo se encuentra
∆2
Ahora al evaluar la velocidad en , se tiene:
∆2
∆2
De donde:
∆ ∆2
Al reemplazar ∆ , en esta última ecuación, se halla:
∆ ∆2 ∆ 2 ∆ ∆
∆2
Ahora al integrar la ecuación de la velocidad, se halla:
(2.18)

ROBERTO AGUIAR FALCONI CEINCI-ESPE
51
2
Para
q t ∆2
∆8
Al reemplazar el desplazamiento y la velocidad y finalmente al evaluar el
desplazamiento en el tiempo 1, se tiene:
q q q ∆t2 q
∆t8 q q
∆t2
∆t2 q
∆t8
De donde, el incremento de desplazamientos es:
∆ ∆ 38 ∆
∆8
De igual manera se deja que el lector deduzca que:
∆ ∆ ∆
8 ∆ 4 ∆ ∆ ∆
8 ∆
2 Al reemplazar el incremento de velocidad y el incremento de desplazamiento en la
ecuación (2.2) se tiene:
∆ ∆2 ∆ 2 ∆
∆8 ∆ 4 ∆
De donde se encuentra:
∆ ∆ Siendo:
∆2
∆8
∆ ∆ ∆ ∆ ∆2
2.4 MÉTODO DE NEWMARK
Se han deducido por separado, los tres casos que contempla el Método de Newmark. Ahora se presentan estos tres en la forma que lo hizo el Profesor Nathan Newmark. Pero solo se indican las ecuaciones que varían en los tres casos y son:
∆ ∆ ∆
2 ∆ ∆
∆2 ∆
(2.19)
(2.20)
(2.21)
(2.22)

ESPECTROS DE RESPUESTA
52
Para el método de aceleración lineal 1/6 (0.1667); para el método de aceleración
constante 1/4 (0.25); y para el método de aceleración escalonada 1/8 (0.125). De tal manera que se puede indicar que varía entre:
0.125 0.25
Existen problemas en los cuales el método es inestable para un determinado valor de ,
por lo que se recomienda considerar otro valor que se encuentre comprendido entre 0.125 y 0.25.
• EJEMPLO 2
Encontrar la respuesta en desplazamientos de la estructura del ejemplo 1, ante el pulso
rectangular de 2500 kg., que tiene una duración de 0.5 s. Trabajar con ∆ 0.05 . Presentar en un solo gráfico las respuestas considerando el valor de para:
aceleración lineal; aceleración constante y aceleración escalonada.
• SOLUCIÓN
10 kg s2/cm; 1000 kg/cm; 20 kg/cm. En la figura 2.7 se presentan las tres respuestas que se obtienen con los diferentes
valores de . La respuesta para el método de aceleración lineal y escalonada, prácticamente es la misma; para aceleración constante existe una pequeña diferencia.
Figura 2.7 Respuesta ante un Pulso Rectangular

ROBERTO AGUIAR FALCONI CEINCI-ESPE
53
• EJEMPLO 3
La estructura del ejemplo 1, que tiene: 10 kg s2/cm; 1000 kg/cm; 20 kg/cm; 0.10, está sometida a la carga triangular indicada en la figura 2.8, se pide:
1. Encontrar la respuesta en el tiempo, empleando el Método de Newmark, utilizando
∆ 0.01 . Presentar las tres primeras filas de cálculo para el método de aceleración lineal.
2. En un gráfico presentar la respuesta en el tiempo, considerando el valor de para: aceleración lineal; aceleración constante y aceleración escalonada. Considerar ∆0.05 .
3. Utilizando la Integral de Duhamel presentar la respuesta en el tiempo y comparar los resultados con el Método de aceleración lineal, en una gráfica. Considerar ∆ 0.01 .
Figura 2.8 Sistema de un grado de libertad sometido a una fuerza triangular
• SOLUCIÓN
1) Método de aceleración lineal
En la tabla 2.2 se presenta la respuesta en el tiempo para las tres primeras filas de
cálculo. El objetivo es que el lector compruebe estos valores.
Tabla 2.2 Resultados hasta 0.15 s., empleando Método de Aceleración Lineal con Δ 0.01 .
(s.) ∆ (kg.)
∆ (cm/s2)
(cm/s2)
∆ (cm/s)
(cm/s)
∆ (cm)
(cm)
0.00 -112.50 -11.1248 250.00 2.444 0 0.0124 0 0.01 -134.1625 -13.2670 238.8752 2.3224 2.4444 0.0362 0.0124 0.02 -154.07 -15.2356 225.6082 2.1799 4.7668 0.0588 0.0486
2) Respuesta en el tiempo con Δ 0.05 . Al encontrar la respuesta con Δ 0.01 ., los tres métodos reportan los mismos
resultados por este motivo se cálculo con Δ 0.05 ., para ver alguna diferencia; los resultados se presentan en la figura 2.9.

ESPECTROS DE RESPUESTA
54
Figura 2.9 Respuesta en el tiempo ante fuerza triangular. Δ 0.05 .
3) Integral de Duhamel
Aplicando las ecuaciones descritas en el Capítulo 1, al caso de que la excitación sea una fuerza en lugar de una aceleración, se tiene:
cos
cos
sen
Para la fuerza triangular se tiene:
1
Donde 0 2500 ; 0.5 . = 10 ; 1 = 9,9499 1/s.
En la programación primero se halla las variables y utilizando la función trapz de Matlab. La integración se realiza tantas veces como incrementos de tiempo se hayan considerado. Luego se utiliza la ecuación (2.23) para encontrar la respuesta en el tiempo, la misma que se presenta en la figura 2.10
(2.23)
(2.24)
(2.25)

ROBERTO AGUIAR FALCONI CEINCI-ESPE
55
Figura 2.10 Comparación de la respuesta con Integral de Duhamel y Aceleración Lineal.
• EJEMPLO 4
Resolver analíticamente el problema anterior, mediante la Integral de Duhamel para el caso de que 0, graficar la respuesta en el tiempo hallada con la Integral de Duhamel y con el Método de Aceleración Lineal, con Δ 0.01 .
Figura 2.11 Sistema de un grado de libertad sin amortiguamiento ante un pulso triangular.
• SOLUCIÓN
La respuesta en el tiempo, de un sistema de un grado de libertad, sin amortiguamiento,
ante un pulso triangular, figura 2.11, aplicando la Integral de Duhamel, es la siguiente. Paz (1992).
Para
1 cos

ESPECTROS DE RESPUESTA
56
La velocidad es:
cos
Se necesita conocer el desplazamiento y velocidad en ya que estos valores
serán condiciones iniciales para hallar la respuesta en el tiempo en .
cos
1
Para se debe resolver la siguiente ecuación diferencial.
0 Esto es debido a que para , la fuerza es cero. La solución de esta ecuación
diferencial homogénea con condiciones iniciales fue estudiada en el Capítulo 1 y es la siguiente:
cos
En la figura 2.12 se presenta la respuesta de desplazamientos hallada con la Integral
de Duhamel y la que se encuentra con el Método de Aceleración Lineal, para un ∆ 0.01 . Se nota que éste último método se aproxima muy bien a la respuesta analítica hallada con la Integral de Duhamel.
Figura 2.12 Respuestas encontradas con Integral de Duhamel y Aceleración Lineal.
(2.26)
(2.27)

ROBERTO AGUIAR FALCONI CEINCI-ESPE
57
2.5 RESPUESTA ANTE UN SISMO
La ecuación diferencial que gobierna el problema de un sistema de un grado de libertad ante una acción sísmica, es la siguiente:
Donde , , son la masa, amortiguamiento y rigidez; , , son el desplazamiento, velocidad y aceleración; es la aceleración del suelo. El procedimiento de cálculo al aplicar el Método de Newmark, es el siguiente.
i. Se determina la masa equivalente del sistema
∆2 ∆
ii. Se halla el incremento de carga ∆
∆ ∆ ∆ ∆ ∆
∆
iii. Se halla el incremento de aceleraciones ∆
∆ ∆
iv. Se encuentra el incremento de velocidad ∆
∆ ∆ ∆ ∆2
v. Se determina el incremento de desplazamiento
∆ ∆ ∆
2 ∆ ∆
vi. Se obtiene el nuevo desplazamiento, velocidad y aceleración en
∆ ∆ ∆
vii. Los valores obtenidos en el tiempo se asignan a para el siguiente ciclo
El programa lineal, halla en forma gráfica, la respuesta en el tiempo de un sistema de un grado de libertad, ante una acción sísmica, definida por su acelerograma, aplicando el Método de Newmark.
Antes de utilizarlo se debe grabar el archivo que contiene únicamente las aceleraciones
del sismo en formato ASCII. El nombre tiene extensión .dat. Después de ello cuando se encuentra en la modalidad consola se carga el acelerograma y después se ejecuta lineal, de la siguiente manera:
[d,v,a] = lineal (p,m,c,k,dt,beta)
• p es el nombre del archivo que contiene el acelerograma.
(2.28)

ESPECTROS DE RESPUESTA
58
• m es la masa del sistema de 1 gdl. • c es el amortiguamiento del sistema de 1 gdl. • k es la rigidez del sistema de 1 gdl. • dt es el incremento de tiempo con el cual se desea hallar la respuesta. El mismo
que tiene que ser igual al incremento de tiempo con el cual se obtuvo el acelerograma.
• beta Valor de del Método, varía entre 0.125 y 0.25; el valor de 0.125 es para aceleración escalonada; =.1667 para aceleración lineal y 0.25 para aceleración constante.
Una vez que se ejecuta lineal aparecen cuatro gráficas, la primera de ellas es el
acelerograma, que es dato. La segunda la respuesta en el tiempo de los desplazamientos, la tercera de las velocidades y la última de las aceleraciones. function [d,v,a]=lineal(p,m,c,k,dt,beta) % % Respuesta en el tiempo de un sistema de un grado de libertad, ante un % sismo por el Metodo Beta de Newmark % % Por: Roberto Aguiar Falconi % CEINCI ESPE % Marzo de 2013 %------------------------------------------------------------------ % [d,v,a]=lineal(p,m,c,k,dt,beta) %------------------------------------------------------------------ % p : vector que contiene los registros del acelerograma % m : masa del sistema % c : amortiguamiento del sistema % k : rigidez del sistema % d, v, a : desplazamiento, velocidad y aceleracion de la respuesta % dt : incremento de tiempo % beta: Valor que varía entre 0.125 y 0.25. % n=length(p);tmax=dt*n;t=linspace(0,tmax,n)'; ma=m+(c*dt/2)+(beta*k*dt*dt); d(1)=0; v(1)=0; a(1)=0; % Condiciones iniciales for i=1:n-1 dq=-m*(p(i+1)-p(i));dqa=dq-a(i)*(c*dt+k*dt*dt/2)-v(i)*k*dt; inca=dqa/ma; incv=a(i)*dt+inca*dt/2; incd=v(i)*dt+a(i)*dt*dt/2+beta*inca*dt*dt; d(i+1)=d(i)+incd; v(i+1)=v(i)+incv; a(i+1)=a(i)+inca; end subplot (4,1,1); plot (t,p); title('Acelerograma'); subplot (4,1,2); plot (t,d); ylabel('Desplazamiento'); subplot (4,1,3); plot (t,v); ylabel('Velocidad'); subplot (4,1,4); plot (t,a);xlabel('Tiempo'); ylabel('Aceleracion'); %---fin---
• EJEMPLO 5
Hallar la respuesta en el tiempo de un sistema de un grado de libertad, que tiene una
masa cm
sTm2
004898.0= , una frecuencia natural s
Wn12832.6= y un coeficiente de
amortiguamiento 05.0=ξ . Ante el sismo del 9 de noviembre de 1974, registrado en el Perú. El acelerograma fue obtenido a 80 Km., del epicentro sobre un suelo limo arcilloso. El evento

ROBERTO AGUIAR FALCONI CEINCI-ESPE
59
tuvo una magnitud de 6. La aceleración máxima del sismo, en valor absoluto fue de 117 gals (cm/s2). El incremento de tiempo con el cual fue obtenido el registro es st 02.0=Δ . Calcular con el valor de 0.1667
• SOLUCIÓN
Para utilizar el programa lineal se debe determinar el amortiguamiento y la rigidez del sistema, en base a la frecuencia natural y al coeficiente de amortiguamiento.
39.4786 0.004898 0.19336619 /
2 √
2 √ 2 0.05 √0.004898 0.193366 0.0030775
El período del sistema que se analiza es 2 / 1 s. Una vez cargado el
acelerograma como un vector, en la modalidad consola, se ejecuta el programa lineal. >>load Peru04.dat >>[d,v,a] = lineal (Peru04, 0.004898, 0.00307751136, 0.19336619, 0.02, 0.1667)
Es importante tener muy en cuenta las unidades. Si el acelerograma viene en gals. Se debe trabajar todo con cm y s. Así es como se ha procedido en el ejemplo realizado.
En la figura 2.13 se indica la respuesta en el tiempo del sistema de 1 gdl., del ejemplo
5. Como se indicó aparece el acelerograma, los desplazamientos, velocidad y aceleración.
Se puede hallar las respuestas máximas, en valor absoluto, desde la modalidad consola de la siguiente manera:
>>Sd=max(abs(d)) Sd= 2.9841 >>Sv=max(abs(v)) Sv= 23.8636 >>Sa=max(abs(a)) Sa= 213.5084
Se ha denominado Sd, Sv, Sa a la máxima respuesta, en valor absoluto, de los desplazamientos, velocidades y aceleraciones, respectivamente.

ESPECTROS DE RESPUESTA
60
Figura 2.13 Respuesta en el tiempo de Ejemplo 5.
• EJEMPLO 6
Hallar la respuesta en el tiempo de un sistema cuya masa es 0.0024 Ts2/cm, la rigidez es 0.023687 T/cm y el amortiguamiento vale 0.000753981 Ts/cm. Ante el sismo utilizado en el ejemplo 5 y con el mismo valor de .
• SOLUCIÓN
El sistema de 1 gdl del ejercicio anterior, tenía un período de vibración de 1 segundo y el de este ejercicio, tiene un período de 2 segundos. Es importante tener esto presente para el tema que se tratará en el próximo apartado, sobre espectros de respuesta.
>>load Peru04.dat >>[d,v,a] = lineal (Peru04, 0.0024, 0.000753981, 0.023687, 0.02, 0.1667)
La respuesta en desplazamientos, velocidades y aceleraciones, que reporta el programa, se indica en la figura 2.14. Por otra parte, las respuestas máximas son:
cmSd 6702.2= . ./0933.15 scmSv = y 2/5191.129 scmSa = .

ROBERTO AGUIAR FALCONI CEINCI-ESPE
61
Figura 2.14 Respuesta en el tiempo de Ejemplo 6.
2.6 REFORZAMIENTO DE ESTRUCTURAS CON FRP
Una forma de reforzar estructuras es colocando FRP (Fyber Reinforced Polymer) en los extremos de las columnas y vigas, de esta manera se incrementa la resistencia del hormigón en los lugares reforzados y por ende el módulo de elasticidad del material.
En la figura 2.15 se presenta una estructura que fue reforzada con CFRP (Fibra de
Carbono) en los extremos de las columnas y vigas, en una longitud que está alrededor de los 60 cm. Esta estructura fue construida por investigadores de la Universidad Tecnológica Nacional de Mendoza y ensayada en la Universidad de San Juan.
Lo que interesa en este apartado es mostrar el modelo de Giberson (1969) con el cual
se puede realizar el análisis lineal de una estructura cuyos elementos han sido reforzados con FRP en forma similar al presentado en la figura 2.15.
De igual forma es de interés mostrar la forma como se realiza el análisis sísmico
considerando que todos los elementos son axialmente rígidos y como en este capítulo se estudia sistemas de un grado de libertad, se determina en primer lugar la matriz de rigidez completa con todos los grados de libertad y después se condensa a la coordenada lateral. Se halla la respuesta en el tiempo ante la acción dinámica que fue ensayada en la Universidad de Mendoza y se determina la historia de momentos en el nudo inicial de la columna izquierda.

ESPECTROS DE RESPUESTA
62
Figura 2.15 Reforzamiento de Estructuras con FRP. (Cortesía Gustavo Palazzo)
2.6.1 Modelo de Giberson
En la parte superior de la figura 2.16 se presenta el modelo de Giberson (1969) para un
elemento de sección constante que tiene una rigidez a flexión en el nudo inicial ; en el centro de luz y en el nudo final . En la parte inferior de la mencionada figura se indican los grados de libertad para un elemento axialmente rígido.
Figura 2.16 Modelo de Plasticidad Concentrada de Giberson
La matriz de flexibilidad para el modelo de Giberson, es la siguiente:
6 1 1
1 1
(2.29)

ROBERTO AGUIAR FALCONI CEINCI-ESPE
63
Se denomina sistema 1, al sistema de coordenadas mostrado en la figura 2.16 y sea su matriz de rigidez la misma que se obtiene sacando la inversa a la matriz .
La matriz de rigidez en coordenadas locales , ver figura 2.17, se denomina y se obtiene por medio de la matriz de paso . Aguiar (2004).
0 1/ 10 1/ 0
0 1/ 00 1/ 1
Donde es la longitud del elemento.
Figura 2.17 Sistema de coordenadas locales
Nótese en el sistema de coordenadas locales que se ha colocado la deformación axial
a pesar de que se está considerando que el elemento es axialmente rígido pero en la matriz , la primera y cuarta columna son cero porque es ∞. Se trabaja con los 6 grados de
libertad para que la matriz de rigidez sea de 6 por 6. Para encontrar la matriz de rigidez en coordenadas globales se debe hallar la
matriz de paso . En la figura 2.18 se presenta a la izquierda el sistema de coordenadas locales y a la derecha el sistema de coordenadas globales, para un elemento inclinado que forma un ángulo con la horizontal.
Figura 2.18 Sistema de coordenadas locales y globales para un elemento inclinado
Donde es la matriz de rotación de coordenadas locales a globales.

ESPECTROS DE RESPUESTA
64
cos 0
cos 00 0 1
Finalmente la matriz de rigidez en coordenadas globales se halla efectuando el
siguiente triple producto matricial.
El programa de computación que determina la matriz de rigidez de un elemento axialmente rígido, utilizando el modelo de Giberson, se denomina kmiembro_giberson
• [K3,K1]=kmiembro_giberson(EIF,L,seno,coseno)
Datos: EIF Vector que contiene las rigideces , , L Longitud del elemento seno Valor de coseno Valor de cos El programa reporta la matriz de rigidez del elemento en coordenadas globales y la
matriz de rigidez en el sistema de coordenadas 1, que se había denominado . 2.6.2 Matriz de rigidez de la estructura
Para el caso plano, el modelo de la estructura indicada en la figura 2.15 es el presentado en la figura 2.19. Nótese que se consideran todos los elementos axialmente rígidos
∞ de tal manera que el sistema tiene 3 grados de libertad, un desplazamiento horizontal (coordenada principal) y los dos giros (coordenadas secundarias).
Figura 2.19 Modelo de análisis
La matriz de rigidez de la estructura se halla por ensamblaje directo, para lo cual se
debe determinar la matriz de rigidez en coordenadas globales de cada elemento y su respectivo vector de colocación VC que está compuesto por los grados de libertad del nudo inicial y del nudo final.
En la figura 2.20 se presenta la numeración de los nudos y elementos. En base a esta
numeración la matriz que contiene las Coordenadas Generalizadas CG, se la obtiene con el programa cg_sismo_axial cuya forma de uso es la siguiente:
• [CG,ngl]=cg_sismo_axial(nod,np,nr)
Datos:

ROBERTO AGUIAR FALCONI CEINCI-ESPE
65
nod Número de nudos de la estructura np Número de pisos de la estructura nr Número de nudos restringidos
Para el ejemplo: nod = 4; np=1; nr=2. El programa reporta una matriz que contiene las coordenadas generalizadas CG y el número de grados de liberad.
0 0 00 0 01 0 21 0 3
Figura 2.20 Numeración de nudos y elementos.
Para hallar la matriz que contiene los vectores de colocación de los elementos se tiene
el programa vc cuya forma de uso es:
• [VC]=vc(NI,NJ,CG)
Donde NI Es un vector que contiene los nudos iniciales de los elementos. NJ Es un vector que contiene los nudos finales de los elementos. CG Es la matriz con las coordenadas generalizadas.
Para el ejemplo, la matriz con los vectores de colocación es la siguiente.
0 0 00 0 01 0 2
1 0 21 0 31 0 3
El programa krigidez_giberson determina la matriz de rigidez de la estructura
considerando que los elementos son axialmente rígidos y utilizando el modelo de Giberson. La forma de uso y datos de entrada, son:
• [SS,Kpp]=krigidez_giberson (ngl,EIF,L,seno,coseno,VC)
Datos: ngl Número de grados de libertad EIF Matriz que contiene (EI)a; (EI)o; (EI)b para cada elemento. L Vector con las longitudes de los elementos seno Vector con el seno de cada elemento coseno Vector con el coseno de cada elemento VC Matriz con los vectores de colocación de los elementos
El programa reporta la matriz de rigidez de la estructura y una matriz denominada que contiene las matrices de rigidez en coordenadas globales de los elementos.

ESPECTROS DE RESPUESTA
66
La matriz de rigidez de la estructura que se halla es de 3 por 3. Esta se condensa a la coordenada principal mediante la siguiente ecuación. Aguiar (2004)
En el ejemplo numérico que se realiza más adelante se indica cada una de las
submatrices. De esta manera se tiene un sistema de un grado de libertad para la estructura de la figura 2.19. 2.6.3 Respuesta en desplazamientos
La respuesta en el tiempo, del desplazamiento lateral de la estructura (coordenada principal) se halla con el programa lineal, que ha sido ya indicado. Ahora para calcular las coordenadas secundarias se utiliza la siguiente ecuación:
Donde es la coordenada principal; son las coordenadas principales. De tal
manera que el vector q (coordenadas generalizadas) que contiene al desplazamiento y los dos giros, para la estructura de la figura 2.19, es:
2.6.4 Respuesta en cargas
Para encontrar la fuerza de corte o el momento, en el nudo inicial o final de cualquier elemento se debe hallar primero las deformaciones en coordenadas globales ver figura 2.18. Esto se obtiene con el vector de colocación del elemento VC, y el vector .
Una vez que se tiene se halla el vector de cargas en coordenadas globales
mediante la siguiente ecuación:
Donde es la matriz de rigidez del elemento en coordenadas globales. Ahora se encuentra el vector de cargas en coordenadas locales (ver figura 2.18) mediante la matriz de paso usando la siguiente ecuación matricial.
Si no existe carga en los elementos, el problema finaliza con lo indicado pero si existe
carga en el elemento se debe sumar el problema primario más el problema complementario. La ecuación (2.33) reporta el problema complementario y el problema primario son las acciones de empotramiento perfecto. Aguiar (2004).
Todo lo indicado para encontrar las fuerzas y momentos en los elementos se obtiene
con el programa fuerzas_FRP cuya forma de uso se indica a continuación.
• [FF]=fuerzas_FRP(seno,coseno,VC,Kpp,q,Q2)
Donde: seno Vector que contiene los senos de los elementos coseno Vector que contiene los cosenos de los elementos
(2.30)
(2.31)
(2.32)
(2.33)

ROBERTO AGUIAR FALCONI CEINCI-ESPE
67
VC Matriz con los vectores de colocación de cada elemento Kpp Matriz con las matrices de rigidez en coordenadas globales, de cada
elemento. q Vector que contiene las coordenadas generalizadas de la estructura. Q2 Matriz con las acciones de empotramiento perfecto de los elementos
que tienen carga.
• EJEMPLO 7
La estructura reforzada con FRP, mostrada en la figura 2.15, es espacial pero para analizarla como un sistema de un grado de libertad ha sido modelada en el plano en la forma en que se presenta en la figura 2.19.
La masa que gravita sobre ese pórtico es 0.157 / ; El factor 0.05. Las
rigidez a flexión de cada elemento se indica en la tabla 2.3, es importante resaltar que fue diseñada con el criterio de viga fuerte columna débil, contrario a la filosofía de diseño actual. La acción sísmica a la que fue sometida es la mostrada en la figura 2.21.
Figura 2.21 Acelerograma utilizado en el ensayo de San Juan.
Tabla 2.3 Rigideces a flexión en nudo inicial, centro de luz y nudo final. Elemento
(T/m)
(T/m)
(T/m) 1 73.90 59.85 73.90 2 73.90 59.85 73.90 3 159.40 141.87 159.40
Se pide:
1) Mostrar la matriz de rigidez de la estructura para los grados de libertad indicados a la derecha de la figura 2.19.
2) Determinar la matriz de rigidez asociada a la coordenada principal con la que se realiza el análisis dinámico.
3) Calcular el amortiguamiento del sistema.

ESPECTROS DE RESPUESTA
68
4) Encontrar la respuesta en desplazamientos laterales. 5) Presentar la respuesta en momentos para el pie de la columna izquierda. 6) Indicar el programa de computación elaborado para resolver el ejercicio, utilizando la
librería de programas de CEINCI-LAB
• SOLUCIÓN
1) Matriz de Rigidez de la Estructura
95.3055 63.1399 63.139963.1399 420.5077 165.465763.1399 165.4657 420.5077
2) Matriz de rigidez condensada
95.3055 63.1399 63.1399
420.5077 165.4657
165.4657 420.5077 63.139963.1399
81.6986 /
3) Amortiguamiento
2 √ 2 0.05 √0.157 81.6986 0.3581 /
4) Respuesta en desplazamientos
Figura 2.22 Desplazamientos laterales del primer piso.
ROBERTO AGUIAR FALCONI CEINCI-ESPE
69
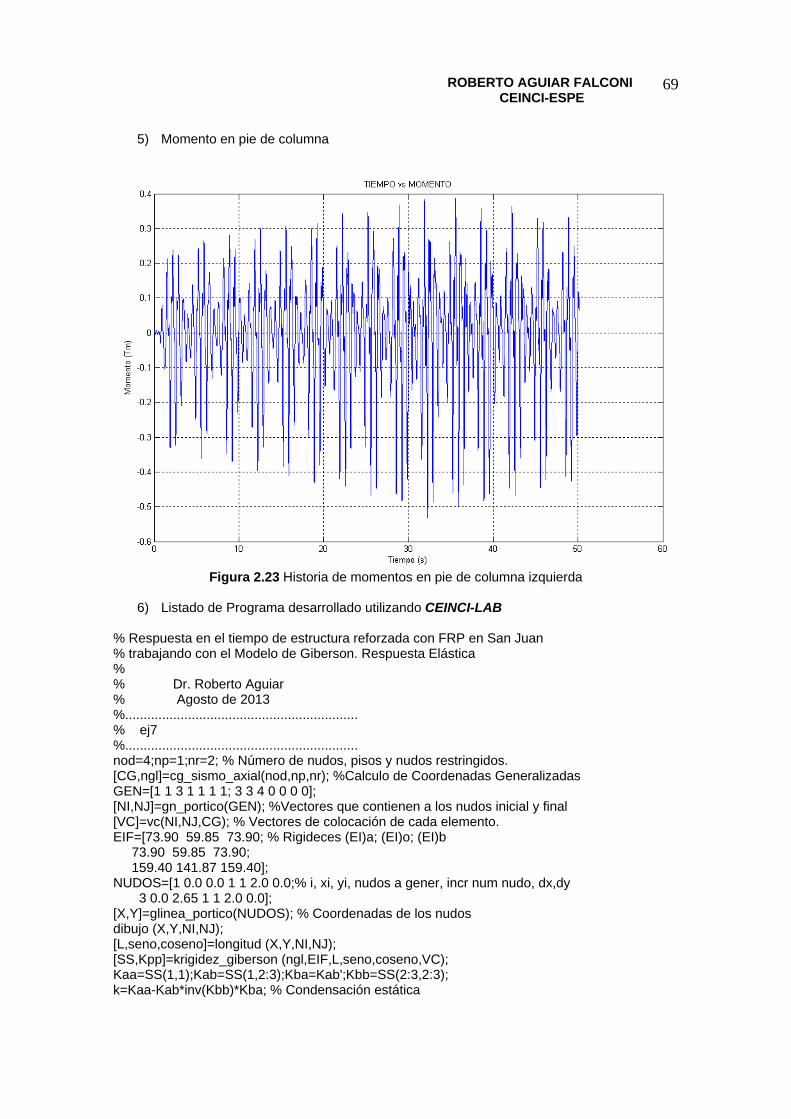
5) Momento en pie de columna
Figura 2.23 Historia de momentos en pie de columna izquierda
6) Listado de Programa desarrollado utilizando CEINCI-LAB
% Respuesta en el tiempo de estructura reforzada con FRP en San Juan % trabajando con el Modelo de Giberson. Respuesta Elástica % % Dr. Roberto Aguiar % Agosto de 2013 %............................................................... % ej7 %............................................................... nod=4;np=1;nr=2; % Número de nudos, pisos y nudos restringidos. [CG,ngl]=cg_sismo_axial(nod,np,nr); %Calculo de Coordenadas Generalizadas GEN=[1 1 3 1 1 1 1; 3 3 4 0 0 0 0]; [NI,NJ]=gn_portico(GEN); %Vectores que contienen a los nudos inicial y final [VC]=vc(NI,NJ,CG); % Vectores de colocación de cada elemento. EIF=[73.90 59.85 73.90; % Rigideces (EI)a; (EI)o; (EI)b 73.90 59.85 73.90; 159.40 141.87 159.40]; NUDOS=[1 0.0 0.0 1 1 2.0 0.0;% i, xi, yi, nudos a gener, incr num nudo, dx,dy 3 0.0 2.65 1 1 2.0 0.0]; [X,Y]=glinea_portico(NUDOS); % Coordenadas de los nudos dibujo (X,Y,NI,NJ); [L,seno,coseno]=longitud (X,Y,NI,NJ); [SS,Kpp]=krigidez_giberson (ngl,EIF,L,seno,coseno,VC); Kaa=SS(1,1);Kab=SS(1,2:3);Kba=Kab';Kbb=SS(2:3,2:3); k=Kaa-Kab*inv(Kbb)*Kba; % Condensación estática

ESPECTROS DE RESPUESTA
70
m=0.157; % Masa total que gravita en el pórtico zeda=0.05; %Factor de amortiguamiento c=2*zeda*sqrt(m*k); %Amortiguamiento del sistema dt=0.005;load sismoSANJUANREFUERZO.txt CC=sismoSANJUANREFUERZO; %Acelerograma como fracción de la gravedad Ad=9.8*CC; % Acelerograma en m/seg2 beta=1/6; [d,v,a]=lineal(Ad,m,c,k,dt,beta); np= length(d) % Número de puntos de la excitación for i=1:np t(i)=(i-1)*dt; qa=d(i); % desplazamiento de coordenada principal qb=-inv(Kbb)*Kba*qa; %Giros. Coordenadas secundarias q=[qa;qb]; % Vector de coordenadas Q2=zeros(3,6); % Vector de empotramiento perfecto [FF]=fuerzas_FRP(seno,coseno,VC,Kpp,q,Q2); Pl(i)=FF(1,3); %Momento en pie de la columna izquierda end figure (2) plot (t,Pl) xlabel('Tiempo (s)');ylabel('Momento (Tm)');title('TIEMPO vs MOMENTO'); grid on figure (3) plot (t,d) xlabel('Tiempo (s)');ylabel('Desplazamiento (m)');title('TIEMPO vs DESPLAZAMIENTO'); grid on figure (4) plot (t,Ad) xlabel('Tiempo (s)');ylabel('Aceleración (m/s2)');title('TIEMPO vs ACELERACIÓN'); REFERENCIAS
1. Aguiar R., (2013), Acelerogramas para componente horizontal. Estudio de Peligrosidad Sísmica y Espectros de Diseño Elástico de la Presa San Franciso., ASTEC-GEODATA, Enerjubones Generadora Hidroeléctrica, 13 p., Quito.
2. Aguiar R., (2011), El mega sismo de Chile 2010 y lecciones para el Ecuador. Centro de Investigaciones Científicas. Instituto Panamericano de Geografía e Historia, IPGH, 184 p. Quito, Ecuador.
3. Aguiar R., (2011), Estudio de Peligrosidad Sísmica y espectro de diseño elástico de la Presa San Francisco., ASTEC-GEODATA, Enerjubones Generadora Hidroeléctrica, 63 p., Quito.
4. Aguiar R., (2002), Sistema de computación CEINCI3 para evaluar daño sísmico en los Países Bolivarianos. Centro de Investigaciones Científicas. Politécnica del Ejército, 302 p. Quito, Ecuador.
5. Aguiar R., (2004), Análisis Matricial de Estructuras. Centro de Investigaciones Científicas, Escuela Politécnica del Ejército, Tercera edición, 550 p., Quito.
6. Aguirre C., Pérez P., (2002), “Microzonificación de los sectores planos de Viña del Mar basada en la amplificación del movimiento del suelo”, VIII Jornadas de Sismología e Ingeniería Antisísmica, Universidad Federico Santa María,12 p., Valparaíso, Chile.
7. Biot M., (1943), “Analytical and experimental methods in engineering seismology”, Trans. American Society Civil Engineering, 108, 365-408.
8. Boroschek R., Soto P., León R., Comte D., (2010,1), Registros del terremoto de Maule, 8.8=WM , 27 de febrero de 2010. Red Nacional de Acelerógrafos, Universidad de
Chile, Facultad de Ciencias Físicas y Matemáticas, Departamento de Ingeniería Civil, Informe 3, 25 p., Santiago.

ROBERTO AGUIAR FALCONI CEINCI-ESPE
71
9. CEC-2000, “Código Ecuatoriano de la Construcción”, XIII Jornadas Nacionales de Ingeniería Estructural. Pontificia Universidad Católica del Ecuador, 325-350, Quito.
10. Durán M., (2001), Programa SYNPRO, Carrera de Ingeniería Civil. Universidad la Serena, Chile.
11. Freeman J., (1932), Earthquake damage and earthquake insurance, Mc Graw - Hill Book Co. Inc.
12. Giberson M,F. (1969) “Two Nonlinear Beams with definitions of Ductility”, Journal of the Structural Division, ASCE, Vol. 95, N. ST2, 137-157.
13. Housner G., (1952) “Spectrum Intensities of strong motion earthquakes”, Proceedings of Symposium on Earthquake and Blunt Effects on Structures, Earthquake Engineering Research Institute, 1952.
14. Housner G., (1959) “Behavior of structures during earthquakes”, Proceedings, ASCE, 85, EM4.
15. Internet: cuicatlali.wordpress.com/El sismo de 1985 vs. El de 2012 ¿Duelo de titanes? 16. Lamar S., (1981) Dinámica de Estructuras, Maestría en Ingeniería Sismo resistente.
Facultad de Ingeniería. Universidad Central de Venezuela. 17. Norma de Aislación (2001), Proposición de código para el análisis y diseño de edificios
con aislación sísmica, Asociación Chilena de Sismología e Ingeniería Sísmica. Achisina, 70 p., Santiago.
18. Norma NCh 433. Of 96 (1996), Diseño Sísmico de Edificios, Instituto de Normalización, INN-Chile, 42 p., Santiago.
19. Ordaz M., Dulché C., (2002), DEGTRA A4, Instituto de Ingeniería, Universidad Autónoma de México, UNAM, México D.F.
20. Paz M., (1992), Dinámica Estructural. Teoría y Cálculo, Editorial Reverté S.A., 645 p. Barcelona, España.
21. Riddell R., and Newmark N., (1979), Statistical analysis of the response of nonlinear systems subjected to earthquakes, Civil Engineering Studies, Structural Research Series. Department of Civil Engineering, University of Illinois, 468, Urbana, Illinois.
22. Riddell R., (1995), “Inelastic design spectra accounting for soil conditions”, Earthquakes Engineering and Structural Dynamics, Vol. 24, 1491-1510.
23. Rosenblueth E., (1965), “Diseño Sísmico”, Revista de la Sociedad Mexicana de Ingeniería Sísmica, A. C., 3 (1), México.
24. Ruiz S., Saragoni R., (2005), “Propuesta de espectros de respuesta de aceleración con 2 peaks para las normas de diseño Chileno que consideran el efecto de suelo y del tipo de terremoto subductivo”, ACHISINA 2005, Universidad de Concepción, 12 p., Concepción.
25. Silva N., (2011), Vulnerabilidad sísmica estructural en viviendas sociales y evaluación preliminar de riesgo sísmico en la Región Metropolitana, Tesis de Maestría en Geofísica, Universidad de Chile.
26. Suyehiro K., (1932) “Engineering Seismology”, Proceedings American Society Civil Engineering, 68 (4).
27. Universidad de Chile (2012), Mw=8.8 Terremoto de Chile, 27 de febrero 2010, Departamento de Ingeniería Civil. Facultad de Ciencias Físicas y Matemáticas. Universidad de Chile, 323 p., Santiago.
28. Vallejo X., (2002), Generación de Sismogramas sintéticos, Tesis para obtener título de Ingeniero Civil, Politécnica del Ejército, 165 p. Quito.


















