CANBus Logger Final A

of 32
-
Upload
jatin-chotaliya -
Category
Documents
-
view
235 -
download
0
Transcript of CANBus Logger Final A
-
8/3/2019 CANBus Logger Final A
1/32
CAN-Bus LoggerFinal A Presentation
Jan. 14, 2010
Elad BarzilayIdan Cohen-Gindi
Supervisor: Boaz Mizrahi
-
8/3/2019 CANBus Logger Final A
2/32
Abstract
The goal of this project is to produce A Real-
time Data Logging system which connects to a
vehicles CAN-Bus, An External GPS deviceand Analog sensors, for reach data storage and
analysis.
-
8/3/2019 CANBus Logger Final A
3/32
Necessity & Overview
In the vehicle industry, the most common protocol is the CAN- Control Area Networkprotocol on a central communication
Bus.
OBD - self diagnostic and reporting capability, which allowsaccess to the vehicles bus and access to variable information
of all sub systems of the vehicle.
The OBD standard is very informative, giving a wide range of
information such as: Engine temperature, RPM, fuel systemstatus, car speed, and many analog sensors data.
The device will operate as a data logger of such information,integrating it with various supporting data from the sensors,
for complete overview of the vehicles operation.
-
8/3/2019 CANBus Logger Final A
4/32
Necessity & Overview
The device will be compact, user friendly and portable, thusmaking it more suitable for personal and public usecontrary
to the rigid, professional OBD scan tools available on the
market today.
The device will posses advanced functions such as:
Advanced diagnostic.
Real time monitoring of the vehicles operation.
Access and control of other control units on the vehicle.
The device will be able to support various applications andwill allow analysis on board a PC.
-
8/3/2019 CANBus Logger Final A
5/32
CAN Protocol - Reminder
CAN is a message based serial communication protocol efficiently supports real-time control and very high level of
reliability and security.
Designed for communication between several ElectronicControl Units (ECU's). Widely spread and accepted standard in industrial systems,
mainly in automotive systems.
Properties:
Prioritized Multi-Master & Multi-Cast Message Routing
Arbitration - CSMA/CD
Strong Error Detection and Fault Confinement
-
8/3/2019 CANBus Logger Final A
6/32
-
8/3/2019 CANBus Logger Final A
7/32
Objectives
Preliminary Design Block Diagram Design Concepts Architecture & Platform
Detailed Design Main Components Electrical Design Pin to Pin Integration & Platform Adjustments Mechanical Design
Layout & Manufacturing Software\Firmware
overview & outline
-
8/3/2019 CANBus Logger Final A
8/32
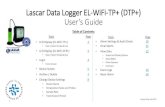
Block Diagram
Processing
UnitData Link
LayerPhysical
Layer
CAN Module
Physical Layer : Maintaining CAN
electrical requirements
Protecting the device
Data Link Layer-
Protocol implementation
Basic message filtering
Processing Unit :
Manage CAN applications
Control peripheral devices
User interface
-
8/3/2019 CANBus Logger Final A
9/32
Block Diagram
CANModule
MCU
AnalogDevices
On-Board User InterfaceLCD & Key-Pad
FlashMemory
CAN Busnetwork
PC
-
8/3/2019 CANBus Logger Final A
10/32
Design Concepts
Complete board design
Evaluation Board
CAN-to-USB
Pigi-board
-
8/3/2019 CANBus Logger Final A
11/32
Design Concepts
Complete board design
Evaluation Board
CAN-to-USB
Pigi-board
Main considerations:
Producing a complete
product Simple design, re-use,
given time frame.
Versatile project, touching various
fields of design.
-
8/3/2019 CANBus Logger Final A
12/32
Architecture & Platform
The chosen Pigi-board concept requires a strong platform for
power and processing.
we explored two devices to base our CAN project uponPCD
and POWER BENCH.
-
8/3/2019 CANBus Logger Final A
13/32
Architecture & Platform
We chose to use the PCD, mainly because of its higher level of
readiness.
in addition, it holds many analog sensors, useful for various applications.
the Power-Bench has better processing abilities, but its also much larger
and a bit of an over-kill for our needs.
-
8/3/2019 CANBus Logger Final A
14/32
Objectives
Preliminary Design Block Diagram Design Concepts Architecture & Platform
Detailed Design Main Components Electrical Design Pin to Pin Integration & Platform Adjustments Mechanical Design
Layout & Manufacturing Software\Firmware
overview & outline
-
8/3/2019 CANBus Logger Final A
15/32
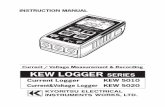
CAN Module Components
CAN Module
CANH
CANL
RX
TX
MCP2551Transceiver
MCP2515Controller
SPI
To
MCU
CAN ControllerMCP2515
Implementing the CAN protocol engine
Receiving and transmitting buffers.
Filtering and masking capabilities for
message analyses and acceptance.
Error detection and handling and bit
timing.
CAN TransceiverMCP2551
Transform the TX,RX lines to CAN_H ,
CAN_L required for the connector
to the bus.
Supports 1 Mb/s operation
Suitable for 12V and 24V systems
fault-tolerant & high buffering protection
-
8/3/2019 CANBus Logger Final A
16/32
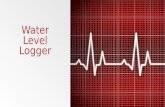
Electrical Design
canctrl_osc1
canctrl_canxr_RX_r
J1
ESQT-102-03-G-S-401
12
J2
ESQT-102-03-G-S-401
1
2
J4
ESQT-102-03-G-S-401
12
J5
ESQT-102-03-G-S-401
12
VCC_3p3
VCC_5p0
can_mcu_intn
mcu_can_spi_clk
mcu_can_spi_dincan_mcu_spi_dout
mcu_can_spi_csn
VCC_3p3
can_rx0bfn
VCC_3p3
VCC_3p3
VCC_5p0
mcu_can_spi_csn
can_mcu_intn
canxr_canh
canctrl_canxr_TX
canxr _rs
can_mcu_sof
canctrl_rst
canctrl_rst_r
can_rx1bfn_dcan_rx1bfn
canxr_canl
can_mcu_spi_doutmcu_can_spi_din
TX0RTSn
canctrl_canxr_RX
U1
MCP2515-I/SO
TXCAN1
RXCAN2
CLKOUT/SOF3
TX0RTS4
TX1RTS5
TX2RTS6
OSC27
OSC18
VSS9
VDD18
RESET17
CS16
SO15
SI14
SCK13
INT12
RX0BF11
RX1BF10
C4
100nF 16V 10%
R3 300
TP3
1
R11
0
D3
LED
D2
LED
R4
300
J3
HEADER-3
123
R7 4.7k
R2
4.7
k
R6
4.7
k
C5
1uF 6.3V 10%
TP4
1
C1
100nF 16V 10%
MCP2551-I/SN
U2
TXD1
V_SS2
V_DD3
RXD4
Rs8
CANH7
CANL6
V_REF5
TX1RTSn
Y124MHz
R8
300
R1
4.7
k
C3 15pF 50V 5%
TP1
1
R10
470
R5
300
C2 15pF 50V 5%
mcu_can_spi_clk
R9120
TP5
1
TP2
1
TX2RTSn
D1LED
VCC_3p3
canctrl_osc2
-
8/3/2019 CANBus Logger Final A
17/32
Pinout Description
Voltage supply 3.3 Volt for the
operation of the MCP2515 CANcontroller.
5 Volt for theoperation of the MCP2551 CAN
transceiver. Gnd
SPI Interface SPI Data In SPI Data In SPI Clock SPI CSn
CAN Communication
MCP2515 Interrupt
request for attention from theMCU.
Connectors on-boardthe PCD board:
Connectors on-boardthe CAN board:
-
8/3/2019 CANBus Logger Final A
18/32
Integration & Platform
Adjustments Add/Remove HW and fix problems spotted during the first debug:
1. Completing the ECOs list.
2. Adding new memory to the new PCB version.
3. Finishing Supporting Firmware.
Making suitable Adjustments for the CAN Module integration:4. Adding needed connectors to the PCD board.
5. Mapping required nets to the CAN module.
6. Integrating connectors and all ECO's (already mapped).
7. Manufacturing the revised board. Bring up and power up of the new Board:
8. Creating bring up software.
9. Mechanical design (CAN board, PCD external case).
-
8/3/2019 CANBus Logger Final A
19/32
Integration & Assembly
Because of shortage of free I/O ports on the microprocessor we are using only
the most essential ports of the CAN controller.
CAN module CS line is mapped to exciting aux debug led line, thus operation
of the module using the bus is indicated by the led.
SPI BUS - both connection of the CAN module and the MicroSD memory
card are mapped to the MCUs SPI module pinout using bus mode.
MCU PIN 53: mcu_aux_led3
R127
300
VCC_3p3
D3
LED
debug_led_pwr
mcu_can_csn
-
8/3/2019 CANBus Logger Final A
20/32
Integration & Assembly
Overloading the CAN module interrupt line upon the existing interrupt linefrom the TMP sensoraccepted method of gathering INT signals.
The SD memory card CS line is mapped as well to the INT bus , thusrequiring adding of pull-up resistor and setting the line configuration as shownhere:
This configuration requires that the arbitration of the INTs and the operationof the SD card will be handled in software.
Usage of the CAN module will be done mostly in polling mode. Reading of the TMP sensor will be done without using the ALERT line. When
used , the CAN module and the SD card must be disabled.
sens_mcu_temp_alert_r
mcu_aux_sd_cs
R70
4.7
k
R86 1k
VCC_3p3
MCU PIN 56: mcu_aux_lcd_led
aux_mcu_can_intMCP2515 INT PIN
TMP Sens INT PIN
sens_mcu_temp_alert
-
8/3/2019 CANBus Logger Final A
21/32
Relevant Modifications
Power-up and shutdown circuitsupgrading and fixing the power stream: Shutting down the device wasnt possible when the battery was still connected.
Same button for power-up and shutdown.
Stabling the voltage levels.
R100247k
C1102
100nF 16V 10%
SW1
1 2
Inv erting DCDC
Inv erting DCDC
VCC_REG
VCC_OUTEN
Non-Inverting DCDC 2
Non-Inverting DCDC
VCC_REG
FB
VCC_OUT
EN
Non-Inverting DCDC 1
Non-Inverting DCDC
VCC_REG
FB
VCC_OUT
EN
ECO
R1003 47kmcu_power_shutdown
mcu_power_shutdown_detect
mcu_power_dcdc_en
chrg_out
C1747uF 6.3V 20%
C?22uF 10V 20%
R12847k
dcdc_3p3_en
-
8/3/2019 CANBus Logger Final A
22/32
Relevant Modifications
Adding new EPROM memory chipadding more memory for the support of: Future CAN applications.
Supporting longer periods of data storing time of the logging process.
Storing BOOT, bring up and configuration data.
U1000
24LC1024
A01
A12
A23
GND4
VCC8
WP7
SCL6
SDA5 mcu_sda
mcu_sclC1002
100nF 16V 10%
ECOVCC_3p3
-
8/3/2019 CANBus Logger Final A
23/32
Mechanical Design
The main mechanical design consideration
is fitting an additional board into the very
crowded PCD package.
The only available free space is between
the main board and the keypad.
Taking in to consideration the spikes on
the bottom of the keypad leaves just
under 11mm.
-
8/3/2019 CANBus Logger Final A
24/32
Mechanical Design
The CAN board is placed on four 100mil
connectors, for robustness. the cards
outline goes around high components
on the PCD board.
All large components and
connectors are located on
the bottom side of the CAN
board.
-
8/3/2019 CANBus Logger Final A
25/32
Mechanical Design
The CAN board dimensions:
length: 22 mm, width: 32 mm, height: 8 mm
Top view: Bottom view:
-
8/3/2019 CANBus Logger Final A
26/32
Objectives
Preliminary Design Block Diagram Design Concepts Architecture & Platform
Detailed Design Main Components Electrical Design Pin to Pin Integration & Platform Adjustments Mechanical Design
Layout & Manufacturing Software\Firmware
overview & outline
-
8/3/2019 CANBus Logger Final A
27/32
Layout & Manufacturing
Top view:Bottom view:
-
8/3/2019 CANBus Logger Final A
28/32
Layout & Manufacturing
30 boards were sent to manufacture, both the revised PCDplatform and the CAN board. Date: 20/12/09 Offshoresupplier (china): MakePCB Ltd. Total cost including taxand shipment: 275 Euro.
-
8/3/2019 CANBus Logger Final A
29/32
Software Outline
1. Device Drivers ( LCD, KEY-PAD, SD, USB )2. Setting up a MENU for starter simple operations like save/send
to memory, receiving op codes from the user by the key-pad.
3. PIC
MCP communication through SPI communication:1. send/receive packets
2. Queuing messages.
3. Filtering capabilities.
4. MCP configuration.
4. Logging process configuration of : time, filtering options, timestamping etc.5. Real time transfer directly to the PC, through USB.
-
8/3/2019 CANBus Logger Final A
30/32
Objectives
Preliminary Design Block Diagram Design Concepts Architecture & Platform
Detailed Design Main Components Electrical Design Pin to Pin Integration & Platform Adjustments Mechanical Design
Layout & Manufacturing Software\Firmware
overview & outline
-
8/3/2019 CANBus Logger Final A
31/32
Project B Milestones
PCD & CAN board bring up. Power up & Connectivity Checking stability of voltage on components and proper
operation.Software Debugging.CAN_H , CAN_L scope analyzeTransmit and receive testing between 2 devices.OBD-II Testing : request, receive, validate and store.
GUI on PC. Final Integration: VEHICLE -> OBD -> MCP -> PIC ->
SD > USB -> PC GUI
-
8/3/2019 CANBus Logger Final A
32/32
Questions
?(u dont have to..)