
Caja reductora Acuñadora de monedas
180
Especificaciones de la caja. Bachiller: Salazar, Francirith. Profesor: Gil, Orlando. Puerto Ordaz, 15 de Febrero del 2011. Universidad Nacional Experimental Politécnica Antonio José de Sucre Vice-rectorado Puerto Ordaz Departamento de Ingeniería Mecánica Cátedra: Proyecto de diseño mecánico.
-
Upload
manuel-correia -
Category
Documents
-
view
72 -
download
0
Transcript of Caja reductora Acuñadora de monedas

Especificaciones de la caja.
- Tres etapas de transmisión.
Bachiller: Salazar, Francirith.
C.I. 19.437.739
Profesor:Gil, Orlando.
Puerto Ordaz, 15 de Febrero del 2011.
Universidad Nacional Experimental PolitécnicaAntonio José de Sucre
Vice-rectorado Puerto OrdazDepartamento de Ingeniería MecánicaCátedra: Proyecto de diseño mecánico.

2
- Engranajes cilíndricos de dientes helicoidales.- Ejes paralelos.- Cambio sincrónico.
Potencia requerida para el acuñado
P=Wt
;(1)
Donde:W: Trabajo realizado durante el acuñado. t: Tiempo empleado durante la fase de trabajo.
Por otra parte:
W =Fmáx × e; (2)
Donde:Fmáx : Fuerza máxima requerida.e: espesor de la moneda.
Sustituyendo en (2):
W =29738,26579 Kg× 0,0024 m=71,3718 kgf .m
Por último, se calcula “t”, representado por el tiempo que tarda el cigüeñal en realizar el recorrido hasta el PMI (α= 355°), como se muestra a continuación:

3
α=ω× t →t=αω
=355×
π180
17rad
s
=0,3644 s
Sustituyendo en (1):
P=71,3718 kgf .m0,3644 s
×1 HP
76kgf .m
s
=2,5771 HP
Eficiencia total
ηtot=η1× η2× η3 ×ηcorreas
Donde:η1 , η2 , η3 :Eficiencias de cada etapa de trabajo.ηcorreas: Eficiencia del sistema de transmisión por correas .
Por lo tanto:
ηtot=0,96 ×0,96 × 0,96 ×0,94=0,83
Potencia real.
PReal=1,2 × P
η tot
=1,2× 2,5771 HP0,83
=3,72 HP
Se tomó un factor de seguridad de 1,2
4
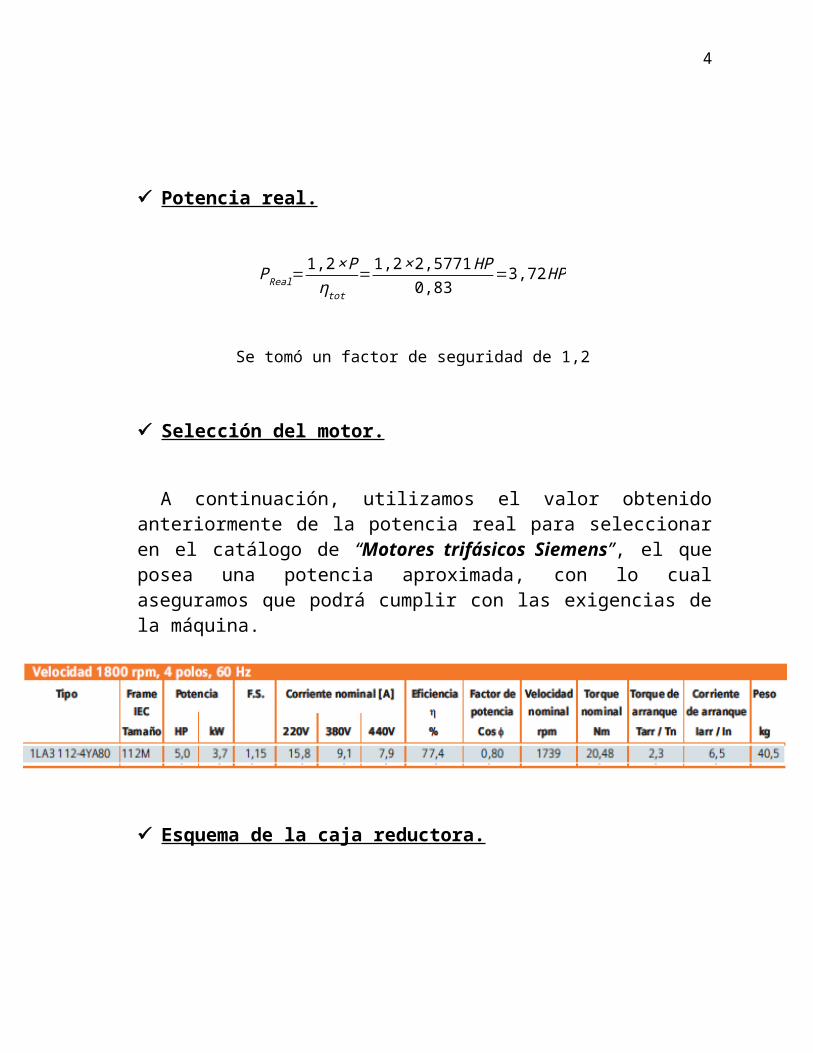
Selección del motor.
A continuación, utilizamos el valor obtenido anteriormente de la potencia real para seleccionar en el catálogo de “Motores trifásicos Siemens”, el que posea una potencia aproximada, con lo cual aseguramos que podrá cumplir con las exigencias de la máquina.
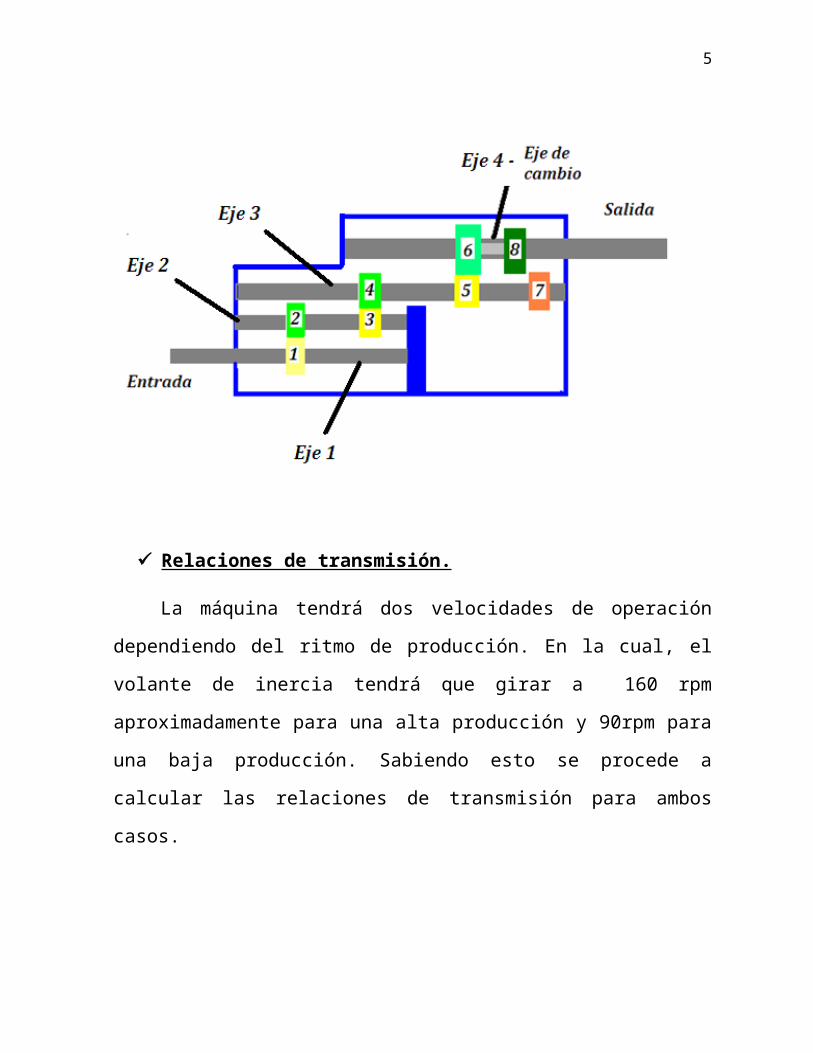
Esquema de la caja reductora.
5
Relaciones de transmisión.
La máquina tendrá dos velocidades de operación dependiendo del ritmo
de producción. En la cual, el volante de inercia tendrá que girar a 160 rpm
aproximadamente para una alta producción y 90rpm para una baja
producción. Sabiendo esto se procede a calcular las relaciones de transmisión
para ambos casos.
i(alta )=nmotor
ns (alta)
→i(alta)=1800 rpm160 rpm
→i(alta )=11.25
i(baja)=nmotor
ns (baja)
→ i(baja)=1800 rpm
90 rpm→ i(baja)=20
Para la transmisión por poleas se tiene una relación de transmisión de 1,3. Por
lo tanto, se tiene que:
it (alta)=icaja (alta )∙ i poleas→icaja(alta)=it (alta)
i poleas
→icaja(alta)=11.251.3
=8,65
it (baja)=icaja (baja)∙ i poleas →icaja(baja)=it (baja)
i poleas
→icaja(baja)=201.3
=15,38

6
Relaciones de transmisión por etapas.
A continuación se calculan las relaciones de transmisión por etapas, tanto para una alta producción como para una baja.
- Baja producción:
ietapa=
3√icaja (baja)→ ietapa=3√15,38 → ietapa=2,48
- Alta producción:
Debemos tomar en cuenta que las dos primeras etapas van a tener la misma relación de transmisión para ambos casos. Por lo tanto, vamos a realizar el cálculo de la relación de transmisión solo en la tercera etapa.
ialta=(i¿¿etapa)2 ∙i →i=ialta
( ietapa)2 → i= 8.65
2,482 → i=1.4¿
Velocidades de cada eje.
neje1=nmotor=1800 rpm
neje2=725,8 rpm
neje3=292,66 rpm
7
neje4−Alta=nsalida=209,04 rpm
neje4−Baja=nsalida=118,008rpm
Perfil de Velocidades.
Engranajes.
Trabajaremos con engranajes cilíndricos de dientes helicoidales.
Primera etapa.
- Diámetro mínimo eje 1:

8
En primer lugar se calcula el diámetro mínimo permitido para el eje. Según Decker Pág. 233.
dmín=3√ T
0.2× τ t adm
; (3)
Donde:
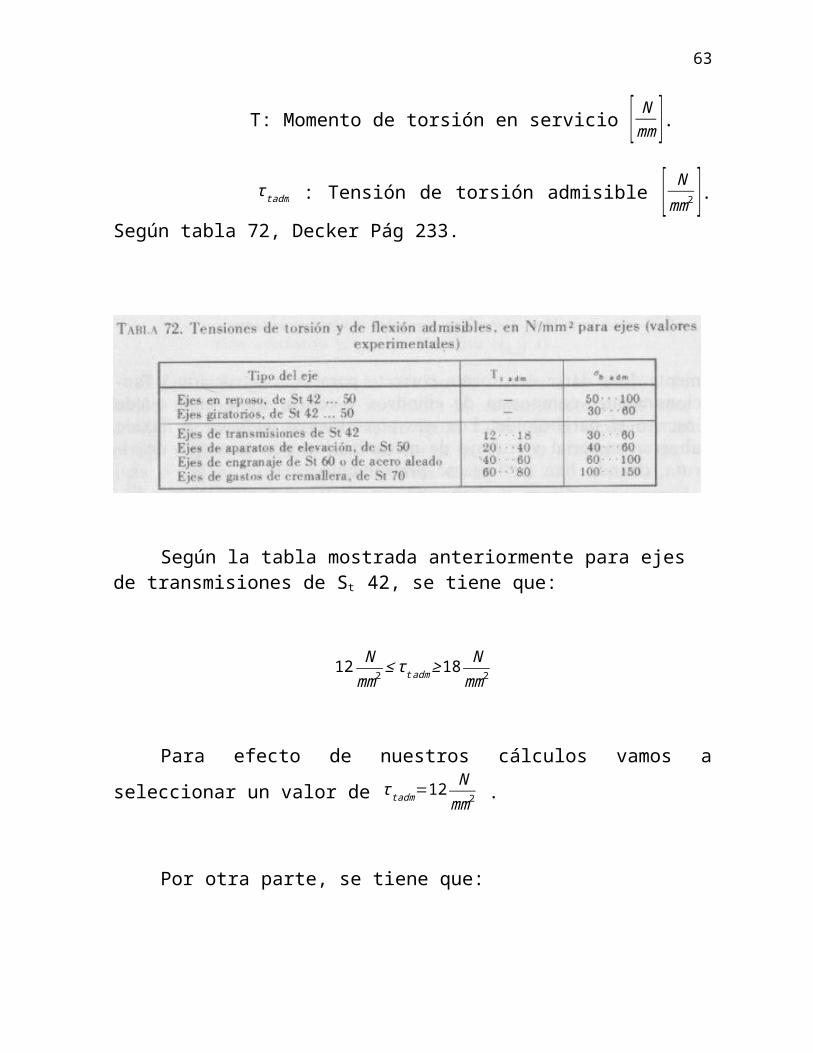
T: Momento de torsión en servicio [ Nmm ].
τ t adm : Tensión de torsión admisible [ N
mm2 ]. Según tabla 72, Decker Pág
233.
Según la tabla mostrada anteriormente para ejes de transmisiones de St
42, se tiene que:
12N
mm2≤ τ t adm ≥18
N
mm2
Para efecto de nuestros cálculos vamos a seleccionar un valor de τ t adm=12
N
mm2 .

9
Por otra parte, se tiene que:
T=Pmotor
ωmotor
× Fs
Donde: Pmotor : Potencia del motor [W ] .
ωmotor :Velocidad angular del motor [ rads ] .
Fs: Factor de servicio del motor.
De manera que:
T= 3700 W
1800 rpm×( π30 )
× 1,15=22,573 N .m=22573 N .mm
Por último, sustituyendo en (3):
dmín=3√ 22573 N ∙ mm
0,2× 12N
mm2
=21,1 mm=2,11cm
El diámetro primitivo del engranaje se encuentra ubicado dentro del intervalo de 1,2 a 2 veces el diámetro mínimo del eje, según la norma DIN 114. En nuestro caso seleccionaremos el valor de 1,2.
D p=1,2 × dmin=1,2 ×2,11 cm=2,532 cm

10
- Velocidad periférica o lineal en el diámetro primitivo:
V=D p ×ω× π
60=0,02532 m ×1800 rpm× π
60=2,38
ms
- Módulo:
Según el procedimiento expuesto en el libro de “Maquinas” de A. L
Casillas Pág. 171, se tiene que:
m=√ PC ×1,52
; (4 )
Donde:
C : Carga de seguridad.P: Presión o esfuerzo tangencial del diente [Kg].
El valor de la carga de seguridad se obtiene del Casillas, Pág. 172, para aceros al cromo níquel Cr=0,45% - Ni=1 % el valor de C se encuentra entre 24
y 28. En nuestro caso seleccionaremos un valor de C = 25 Kg
mm2 .
El valor de P según Casillas, Pág.171, viene dado por la siguiente ecuación:
P=75 × FV

11
Donde:F : Fuerza a transmitir [CV] → F = 5 Hp = 5,07 CV
V : Velocidad periférica o lineal en el diámetro primitivo.
Sustituyendo:
P=75 ×5,07CV
2,38ms
=159,76 Kg
Por último, sustituyendo en (4):
m=√ 159.76 Kg
25kg
mm2 ×1,52=2,05mm
Se procederá a elegir un modulo normalizado mediante la tabla 124 Pág 440 del Decker. Series de módulos en mm, según DIN 780. Tomando en cuenta que para aplicaciones industriales se recomienda que m≥3, se eligió un valor perteneciente a la serie 1 de mn= 3.
- Número de dientes:
Se utilizará un ángulo de presión α=20°, según lo establecido en el Decker, Pág. 44. Para este ángulo existe un número mínimo de dientes el cual viene dado por:
12
Zg=2
sen2 α= 2
sen2(20 °)≅ 17 dientes
Tomando en cuenta lo establecido anteriormente como patrón para un número mínimo de dientes, seleccionaremos para el engranaje 1 un número de dientes igual a 18 ( Z1= 18).
Por otra parte:
i1=Z2
Z1
Por lo tanto, se tiene que:
Z2
Z1
=2,48→ Z2=2,48× Z1=2,48 ×18=44,6≅ 45
ireal=4518
=2,5
- Cálculos geométricos:
o Paso normal:
Pn=π × mn=π ×3 mm=9,424 mm
o Paso frontal:

13
Pf =π × mn
cosβ
Para engranajes helicoidales en ejes paralelos y ruedas de elevada velocidad, se recomienda una ángulo β=30º, según lo establecido en el Casillas Pág. 190. Por lo tanto:
Pf =π × 3 mmcos 30°
=10,882 mm
o Módulo frontal:
mf =mn
cosβ= 3 mm
cos30 °=3,464 mm
o Diámetro primitivo:
d t 1=mn × Z1
cosβ=3 mm ×18
cos30 °=62,353 mm
d t 2=mn × Z2
cosβ=3 mm× 45
cos30 °=155,884 mm
o Altura de la cabeza del diente:
ha=1× mn=1 ×3 mm=3mm
o Altura del pie del diente:

14
h f=1,2 × mn=1,2× 3 mm=3,6 mm
o Diámetro del círculo de la cabeza:
d ta 1=d t 1+2ha=62,353 mm+(2× 3 mm)=68,353 mm
d ta 2=d t 2+2ha=155,884 mm+(2×3 mm)=161,884 mm
o Diámetro del círculo del pie:
d tf 1=dt 1−2hf =62,353 mm−(2×3,6 mm)=55,153 mm
d tf 2=dt 2−2hf =155,884 mm−(2× 3,6mm)=148,684 mm
o Ángulo de engrane frontal:
α t=arctg( tgαn
cosβ )=arctg( tg 20 °cos30 ° )=22,795°
o Diámetro del círculo base:
d tb 1=d t 1 ×cos αt=62,353 mm × cos22,795 °=57,483 mm
d tb 2=d t 2×cos α t=155,884 mm× cos22,795 °=143,708 mm
o Ancho:
Según lo establecido en el Decker, Pág. 459, para conseguir una marcha silenciosa generalmente se elige de modo que:

15
¿¿Recubrimiento de salto)]
De modo que podemos obtener el ancho del engranaje de la siguiente manera:
ε B=b × tan β
P f
→ b=ε B × Pf
tan β=1 ×10,882 mm
tan30 °=18,84 mm
o Paso del engrane:
Pe=Pn ×cos αt=9,424 mm×cos22,795 °=8,687 mm
o Distancia entre centros:
a1−2=d t 1+d t 2
2=62,353 mm+155,884 mm
2=109,118 mm
o Recubrimiento del perfil:
ε α=√r ta 1
2−r tb 12+√r ta 2
2−rtb 22−senα × a1−2
Pe
Sustituyendo:
ε α=√(68,353 mm
2 )2
−(57,483 mm2 )
2
+√( 161,884 mm2 )
2
−( 143,708 mm2 )
2
−sen20 ° ×109,118mm
8.687mm

16
↓
ε α=2,12
↓
2,12 ≥1,1
↓∴Es aceptable
- Cálculos resistivos:
o Fuerza periférica nominal:
F t=P1
V;(5)
Donde: P1:Potencia nominal a transmitir por la rueda pequeña [W].
V : Velocidad periférica del círculo primitivo [ms ].
V=π ×d t 1 ×n1
60=
π × (62,353 mm ) × (1800 rpm )60
×1m
1000 mm=5,876
ms
Sustituyendo en (5):
F t=3700 W
5,876ms
=629,68 N

17
o Fuerza periférica de trabajo:
w=Ft
b× K t ; (6)
Donde: F t :Fuerza periférica nominal [N]. b : Ancho de los dientes [mm]. K t :Factor de trabajo.
Según lo establecido en la tabla 125 Pág 465 del Decker, el valor de K t
depende del tipo de máquina y del tipo de motor utilizado. En este caso se trata de una máquina estampadora y de un motor eléctrico (Electromotor). Por lo tanto, se tiene que:
K t=1,75.
Sustituyendo en (6):
w= 629,68 N18,84 mm
×1,75=58,48N
mm
o Factor dinámico:
K v=1+(1+Cq
w )× C f ×V ;(7)
18
Donde: Cq:Índice de fuerza en relación con la calidad del dentado. C f :Coeficiente de carga.
w : Fuerza especifica de trabajo [ Nmm ].
V : Velocidad periférica del círculo primitivo [ms ].
Según lo establecido en la tabla 128 Pág 471 del Decker, se tiene que para nuestro valor de velocidad periférica la norma DIN 3963 presenta un error colectivo en la calidad de 7 a 6. Por lo cual, en nuestro caso seleccionaremos un valor de 6.
Con el valor seleccionado de error colectivo se prosigue a identificar el factor de fuerza y por último, se ubica el valor del coeficiente de carga. Todo esto, a través, de la tabla 130 Pág 476 del Decker, mostrada a continuación:

19
Cq=22N
mm
Cabe destacar que por tratarse de dentado inclinado solo se debe tomar en cuenta 0,75 veces el valor de la tabla correspondiente a C f , según lo establecido en la Pág 477 del Decker. Por lo tanto:
C f =0,75 ×0,041=0,03075
Sustituyendo en (7):
K v=1+(1+22
Nmm
58,48N
mm)× 0,03075× 5,876=1,248
o Fuerza específica de carga:
20
w t=w × K v=58,48N
mm×1,248=72,983
Nmm
o Fuerza periférica específica:
wFt=w t × K Fα ;(8)
Donde: K Fα :Factor de distribución de la carga frontal.
w t :Fuerza especifica de carga [ Nmm ].
El valor de k fα se encuentra de la siguiente manera:
1. Se buscan los valores de fpe, según tabla 127 Pág 468 del Decker (Utilizando el valor de calidad seleccionado anteriormente, el diámetro primitivo y el módulo).
f pe1=8 μm y f pe2=9 μm
Cabe destacar según lo establecido en la Pág 478 del Decker que debe tomarse el error admisible del paso de engrane es el correspondiente a la rueda 2 para realizar los cálculos. Por lo tanto:
f pe=9μm
2. Se busca el error de engranaje fe, según tabla 131 Pág 478 del Decker.
f e=1× f pe=1 ×9 μm=9 μm
3. Se busca el factor auxiliar qL , según tabla 1321 página 479 del Decker
(Utilizando los valores de F t
by f e).
qL>1

21
4. Por último, se busca el valor de k fα, según tabla 1322 página 479 del Decker (Utilizando los valores de qL y ε α).
K fα=2,10
Sustituyendo en (8):
ωft=72,983N
mm× 2,10=153,264
Nmm
o Esfuerzo de flexión:
σ f=ωft
mn
× Y f ×Y ϵ ×Y β ;(9)
En donde Y f representa el factor de forma del diente, Y βrepresenta el factor angular de inclinación (Para un valor de β=30 ° se tienequeY β=0,75 según lo establecido en la Pág 478 del Decker) y Y ϵ representa el factor de carga parcial que viene dado por lo siguiente:
Y ϵ=1ε α
= 12,12
=0,47

22
Los valores de Y f se obtienen mediante la tabla 133 Pág 480 del Decker, (Utilizando un factor de distribución del perfil x = 0 y los números de dientes aparentes Zn).
Zn1=Z1
cos3 β= 18
cos330 °=27,71≅ 28
Zn2=Z2
cos3 β= 45
cos330 °=69,28≅ 70
Por lo tanto:
Y f 1=2,648 yY f 2=2,292 ;(Interpolando)
Sustituyendo en (9):
σ F1=153,264
Nmm
3 mm× 2,648× 0,47 ×0,75=47,686
N
mm2
σ F2=153,264
Nmm
3 mm× 2,292× 0,47 ×0,75=41,275
N
mm2
o Seguridad contra la rotura por fatiga:
SF=σ FD × ZR ×Y s
σ F
;(10)

23
Donde:
Y s: Factor de entalladura. En nuestro caso se supondrá 0.95. ZR: Factor de rugosidad para la calidad de la superficie de los flancos en el pie del diente. En flancos de dientes limpios o rectificados 0.95 . σ fD :Resistencia a la fatiga por flexión del material. Los valores se obtienen mediante la tabla 134 Pág 481 del Decker, (Utilizando un material para las ruedas dentadas de la categoría de Aceros para bonificación templados por llama o por inducción Ck 45).
σ fD=270N
mm2
Sustituyendo en (10):
SF1=270
N
mm2×0,95× 0,95
47,686N
mm2
=5,109

24
SF2=270
N
mm2×0,95× 0,95
41,275N
mm2
=5,503
Ambos casos cumplen con la condición que se exige para engranajes de marcha permanente, la cual, refleja lo siguiente:
S f ≥ 1,6.
Resistencia a la Rotura de los flancos
o Fuerza periférica específica:
wHt=w t × K Hα ;(11)
En donde k Hα representa el factor de distribución de la carga frontal y se obtiene de la siguiente manera:
1. Se busca el factor de recubrimiento Zϵ (Utilizando los valores de ε α y β), según tabla 1351 página 484 del Decker.
Zϵ=0,6532 (Valor obtenido interpolando)
2. Se busca el valor de k Hα según tabla 1352 página 484 del Decker (Utilizando el valor encontrado anteriormente de Zϵ y el valor de qL).
k Hα=2,29
Sustituyendo en (11):

25
ωHt=72,983N
mm×2,29=167,131
Nmm
o Presión de Hertz:
σ H=√ wHt
d t 1
×u1−2+1
u1−2
× Z H × Z M× Zε ; (12)
En donde ZH representa el factor de forma de los flancos y ZM el factor del material.
El valor de ZH se obtiene mediante la tabla 136 página 485 del Decker ( x=0 y β=30 °).
ZH=1,57
El valor de ZM se obtiene mediante la tabla 137 página 486 del Decker (Para un Acero St G-SnBz14).
ZM=222√ Nmm2
Sustituyendo en (12):
σ H=√ 167,131N
mm62,353 mm
×2,5+1
2,5× 1,57 ×222√ N
mm2 ×0,6532=441,02N
mm2

26
o Seguridad contra la formación de picaduras:
SH=σ HD× KL × Z R
σ H
; (13)
En donde σ HD representa la presión de rodadura permanente, ZR el factor de rugosidad para la calidad de la superficie de los flancos de los dientes que será igual a 1 en flancos de dientes con acabado fino y K L el factor del lubricante, el cual será igual a 1 para una correcta lubricación.
El valor deσ HD se obtiene mediante la tabla 134 página 481 del Decker, (Utilizando un material para las ruedas dentadas de la categoría de Aceros Ck 45).
σ HD=1100N
mm2
Sustituyendo en (13):
SH=1100
N
mm2×1×1
441,02N
mm2
=2,4942
El valor obtenido de SH cumple con la condición que se exige para engranajes de marcha permanente, la cual, refleja lo siguiente: SH ≥ 1,4 para engranajes con Z ≤ 20.

27
o Fuerza periférica:
Fwt=F t× K t
Donde:
K t : Factor de servicio. Según la tabla 125 Pág 465 del Decker se tiene K t=1.75.
Por lo tanto:
Fwt=629,68 N ×1,75=1101,94 N
o Fuerza axial:
Fwa=Fwt ×tg βw
Donde:
βw : Ángulo de inclinación en el cilindro de rodadura, que puede tomarse ≈ β, debido a que la diferencia es muy pequeña.
Por lo tanto:
Fwa=1101,94 N ×tg 30°=636,205 N

28
o Fuerza radial:
Fwr=Fwt ×tg α wt ; (14)
Donde:
α wt : Ángulo de engrane de trabajo. La Ec. 310 Pág. 460 del establece lo siguiente:
α tw=arcos( rt 1+rt 2
a× cosα t)
↓
α tw=arcos( 31,1765 mm+77,942 mm109,118 mm
×cos22.795 °)=22,794 °
Sustituyendo en (14):
Fwr=1101,94 N × tg22,794 °=463,077 N
o Peso aproximado :
Peso1=ρacero ∙ V olumen1
ρacero=7,85 × 10−6 kg
mm3

29
V olumen 1=b×π4
× dt 12=18,84 mm ×
π4
× (62,353 mm )2=57528,822 mm3
Por lo tanto:
Peso1=(7,85 ×10−6 kg
mm3 )×57528,822 mm3≅ 0,451 Kg≅ 4,51 N
Peso 2= ρacero ∙ V olumen2
ρacero=7,85 × 10−6 kg
mm3
V olumen 2=b×π4
× dt 22=18,84 mm ×
π4
× (155,884 mm )2=359562,062 mm3
Por lo tanto:
Peso2=(7,85 ×10−6 kg
mm3 )×359562,062 mm3≅ 2,822 Kg≅ 28,22 N
Segunda etapa.
- Diámetro mínimo eje 2:

30
En primer lugar se calcula el diámetro mínimo permitido para el eje. Según Decker Pág. 233.
dmín=3√ T
0.2× τ t a dm
;(3)
Donde:
T: Momento de torsión en servicio [ Nmm ].
τ t adm : Tensión de torsión admisible [ N
mm2 ]. Según tabla 72, Decker Pág
233.
Según la tabla mostrada anteriormente para ejes de transmisiones de St
42, se tiene que:
12N
mm2≤ τ t adm ≥18
N
mm2
31
Para efecto de nuestros cálculos vamos a seleccionar un valor de τ t adm=12
N
mm2 .
Por otra parte, se tiene que:
T=P2
ω2
× Fs
Donde: P2: Potencia del eje 2 [W ] .
ω2:Velocidad angular del eje 2[ rads ] .
Fs: Factor de servicio del motor.
P2=P1 ×η1=3700W × 0,96=3552W
De manera que:
T= 3552 W
725,8 rpm×( π30 )
× 1,15=53,743 N .m=53743 N . mm
Por último, sustituyendo en (3):
32
dmín=3√ 53743 N ∙mm
0,2× 12[ Nmm2 ]
=28,18mm=2,818 cm
El diámetro primitivo del engranaje se encuentra ubicado dentro del intervalo de 1,2 a 2 veces el diámetro mínimo del eje, según la norma DIN 114. En nuestro caso seleccionaremos el valor de 1,2.
D p=1,2 × dmin=1,2 ×2,818 cm=3,381 cm
- Velocidad periférica o lineal en el diámetro primitivo:
V=D p ×ω× π
60=0,03381 m ×725,8 rpm× π
60=1,28
ms
- Módulo:
Según el procedimiento expuesto en el libro de “Maquinas” de A. L
Casillas Pág. 171, se tiene que:
m=√ PC ×1,52
; (4 )
Donde:
C : Carga de seguridad.P: Presión o esfuerzo tangencial del diente [Kg].

33
El valor de la carga de seguridad se obtiene del Casillas, Pág. 172, para aceros al cromo níquel Cr=0,45% - Ni=1 % el valor de C se encuentra entre 24
y 28. En nuestro caso seleccionaremos un valor de C = 25 Kg
mm2 .
El valor de P según Casillas, Pág.171, viene dado por la siguiente ecuación:
P=75 × FV
Donde:F : Fuerza a transmitir [CV] → F = 5 Hp = 5,07 CV
V : Velocidad periférica o lineal en el diámetro primitivo.
Sustituyendo:
P=75 ×5,07CV
1,28ms
=297,07 Kg
Por último, sustituyendo en (4):
m=√ 297,07 Kg
25kg
mm2 ×1,52=2,79mm

34
Se procederá a elegir un modulo normalizado mediante la tabla 124 Pág 440 del Decker. Series de módulos en mm, según DIN 780. Tomando en cuenta que para aplicaciones industriales se recomienda que m≥3, se eligió un valor perteneciente a la serie 1 de mn= 3.
- Número de dientes:
Se utilizará un ángulo de presión α=20°, según lo establecido en el Decker, Pág. 44. Para este ángulo existe un número mínimo de dientes el cual viene dado por:
Zg=2
sen2 α= 2
sen2(20 °)≅ 17 dientes
Tomando en cuenta lo establecido anteriormente como patrón para un número mínimo de dientes, seleccionaremos para el engranaje 3 un número de dientes igual a 28 ( Z3= 28).
Por otra parte:
i2=Z4
Z3
Por lo tanto, se tiene que:

35
Z4
Z3
=2,48→ Z 4=2,48 × Z3=2,48×28=69,4≅ 70
ireal=7028
=2,5
- Cálculos geométricos:
o Paso normal:
Pn=π × mn=π ×3 mm=9,424 mm
o Paso frontal:
Pf =π × mn
cosβ
Para engranajes helicoidales en ejes paralelos y ruedas de elevada velocidad, se recomienda una ángulo β=30º, según lo establecido en el Casillas Pág. 190. Por lo tanto:
Pf =π × 3 mmcos 30°
=10,882 mm
o Módulo frontal:

36
mf =mn
cosβ= 3 mm
cos30 °=3,464 mm
o Diámetro primitivo:
d t 3=mn × Z3
cosβ=3 mm ×28
cos30 °=96,994 mm
d t 4=mn× Z4
cosβ=3 mm ×70
cos30 °=242,487 mm
o Altura de la cabeza del diente:
ha=1× mn=1 ×3 mm=3mm
o Altura del pie del diente:
h f=1,2 × mn=1,2× 3 mm=3,6 mm
o Diámetro del círculo de la cabeza:
d ta 3=d t 3+2ha=96,994 mm+(2 ×3 mm)=102,994 mm
d ta 4=d t 4+2ha=242,487 mm+(2 ×3 mm)=248,487 mm

37
o Diámetro del círculo del pie:
d tf 3=d t 3−2h f=96,994 mm−(2 ×3,6 mm)=89,794 mm
d tf 4=d t 4−2 h f=242,487mm−(2× 3,6mm)=235,287mm
o Ángulo de engrane frontal:
α t=arctg( tgαn
cosβ )=arctg( tg 20 °cos30 ° )=22,795°
o Diámetro del círculo base:
d tb 3=d t 3× cosα t=96,994 mm×cos 22,795°=89,418 mm
d tb 4=d t 4 × cos αt=242,487 mm× cos22,795 °=223,548 mm
o Ancho:
Según lo establecido en el Decker, Pág. 459, para conseguir una marcha silenciosa generalmente se elige de modo que:
¿¿Recubrimiento de salto)]
De modo que podemos obtener el ancho del engranaje de la siguiente manera:
ε B=b × tan β
P f
→ b=ε B × Pf
tan β=1 ×10,882 mm
tan30 °=18,84 mm

38
o Paso del engrane:
Pe=Pn ×cos αt=9,424 mm×cos22,795 °=8,687 mm
o Distancia entre centros:
a3−4=d t 3+dt 4
2=96,994 mm+242,487 mm
2=169,74 mm
o Recubrimiento del perfil:
ε α=√r ta 3
2−r tb 32+√rta4
2−rtb 42−senα × a3−4
Pe
Sustituyendo:
ε α=√(102,994 mm
2 )2
−( 89,418 mm2 )
2
+√( 248,487 mm2 )
2
−( 223,548 mm2 )
2
−sen20° ×169,74 mm
8.687 mm
↓
ε α=2,501
↓
2,501 ≥1,1
↓∴Es aceptable

39
- Cálculos resistivos:
o Fuerza periférica nominal:
F t=P2
V;(5)
Donde: P2:Potencia nominal a transmitir por la rueda pequeña [W].
V : Velocidad periférica del círculo primitivo [ms ].
V=π ×d t 3 × n2
60=
π × (96,994 mm )× (725,8 rpm )60
×1 m
1000 mm=3,686
ms
Sustituyendo en (5):
F t=3552 W
3,686ms
=963,64 N

40
o Fuerza periférica de trabajo:
w=Ft
b× K t ; (6)
Donde: F t :Fuerza periférica nominal [N]. b : Ancho de los dientes [mm]. K t :Factor de trabajo.
Según lo establecido en la tabla 125 Pág 465 del Decker, el valor de K t
depende del tipo de máquina y del tipo de motor utilizado. En este caso se trata de una máquina estampadora y de un motor eléctrico (Electromotor). Por lo tanto, se tiene que:
K t=1,75.
Sustituyendo en (6):
w= 963,64 N18,84 mm
×1,75=89,51N
mm
o Factor dinámico:
K v=1+(1+Cq
w )C f × V ; (7)

41
Donde: Cq=¿Índice de fuerza en relación con la calidad del dentado. C f =¿Coeficiente de carga.
w=¿ Fuerza especifica de trabajo [ Nmm ].
V=¿ Velocidad periférica del círculo primitivo [ms ].
Según lo establecido en la tabla 128 Pág 471 del Decker, se tiene que para nuestro valor de velocidad periférica la norma DIN 3963 presenta un error colectivo en la calidad de 9 a 8. Por lo cual, en nuestro caso seleccionaremos un valor de 8.
Con el valor seleccionado de error colectivo se prosigue a identificar el factor de fuerza y por último, se ubica el valor del coeficiente de carga. Todo esto, a través, de la tabla 130 Pág 476 del Decker, mostrada a continuación:

42
Cq=37N
mm
Cabe destacar que por tratarse de dentado inclinado solo se debe tomar en cuenta 0,75 veces el valor de la tabla correspondiente a C f , según lo establecido en la Pág 477 del Decker. Por lo tanto:
C f =0,75 ×0,034=0,0255
Sustituyendo en (7):
K v=1+(1+37
Nmm
89,51N
mm)× 0,0255× 3,686=1,132
o Fuerza específica de carga:

43
w t=w × K v=89,51N
mm×1,132=101,325
Nmm
o Fuerza periférica específica:
wFt=w t × K Fα ;(8)
Donde: K Fα :Factor de distribución de la carga frontal.
w t :Fuerza especifica de carga [ Nmm ].
El valor de k fα se encuentra de la siguiente manera:
1. Se buscan los valores de fpe, según tabla 127 Pág 468 del Decker (Utilizando el valor de calidad seleccionado anteriormente, el diámetro primitivo y el módulo).
f pe3=16 μm y f pe4=20 μm
Cabe destacar según lo establecido en la Pág 478 del Decker que debe tomarse el error admisible del paso de engrane es el correspondiente a la rueda 4 para realizar los cálculos. Por lo tanto:
f pe=20 μm
2. Se busca el error de engranaje fe, según tabla 131 Pág 478 del Decker.
f e=1× f pe=1 ×20 μm=20 μm
3. Se busca el factor auxiliar qL , según tabla 1321 página 479 del Decker
(Utilizando los valores de F t
by f e).
qL>1

44
4. Por último, se busca el valor de k fα, según tabla 1322 página 479 del Decker (Utilizando los valores de qL y ε α).
K fα=2,50
Sustituyendo en (8):
ωft=101,325N
mm× 2,50=253,312
Nmm
o Esfuerzo de flexión:
σ f=ωft
mn
× Y f ×Y ϵ ×Y β ;(9)
En donde Y f representa el factor de forma del diente, Y βrepresenta el factor angular de inclinación (Para un valor de β=30 ° se tienequeY β=0,75 según lo establecido en la Pág 478 del Decker) y Y ϵ representa el factor de carga parcial que viene dado por lo siguiente:
Y ϵ=1ε α
= 12,501
≅ 0,4

45
Los valores de Y f se obtienen mediante la tabla 133 Pág 480 del Decker, (Utilizando un factor de distribución del perfil x = 0 y los números de dientes aparentes Zn).
Zn3=Z3
cos3 β= 28
cos330 °=43,10≅ 44
Zn 4=Z 4
cos3 β= 70
cos3 30°=107,77≅ 108
Por lo tanto:
Y f 3=2,414 y Y f 4=2,204 ;(Interpolando)
Sustituyendo en (9):
σ F3=253,312
Nmm
3 mm×2,414 × 0,4 × 0,75=61,14
N
mm2
σ F 4=253,312
Nmm
3 mm× 2,204 ×0,4 ×0,75=55,83
N
mm2
o Seguridad contra la rotura por fatiga:
SF=σ FD × ZR ×Y s
σ F
;(10)

46
Donde:
Y s: Factor de entalladura. En nuestro caso se supondrá 0.95. ZR: Factor de rugosidad para la calidad de la superficie de los flancos en el pie del diente. En flancos de dientes limpios o rectificados 0.95 . σ fD :Resistencia a la fatiga por flexión del material. Los valores se obtienen mediante la tabla 134 Pág 481 del Decker, (Utilizando un material para las ruedas dentadas de la categoría de Aceros para bonificación templados por llama o por inducción Ck 45).
σ fD=270N
mm2
Sustituyendo en (10):
SF3=270
N
mm2×0,95× 0,95
61,14N
mm2
=3,985

47
SF4=270
N
mm2× 0,95×0,95
55,83N
mm2
=4,364
Ambos casos cumplen con la condición que se exige para engranajes de marcha permanente, la cual, refleja lo siguiente:
S f ≥ 1,6.
Resistencia a la Rotura de los flancos
o Fuerza periférica específica:
wHt=w t × K Hα ;(11)
En donde k Hα representa el factor de distribución de la carga frontal y se obtiene de la siguiente manera:
1. Se busca el factor de recubrimiento Zϵ (Utilizando los valores de ε α y β), según tabla 1351 página 484 del Decker.
Zϵ=≤0,6
2. Se busca el valor de k Hα según tabla 1352 página 484 del Decker (Utilizando el valor encontrado anteriormente de Zϵ y el valor de qL).
k Hα=2,50
Sustituyendo en (11):
48
ωHt=101,325N
mm×2,50=253,312
Nmm
o Presión de Hertz:
σ H=√ wHt
d t 3
×u3−4+1
u3−4
× ZH × ZM × Zε ;(12)
En donde ZH representa el factor de forma de los flancos y ZM el factor del material.
El valor de ZH se obtiene mediante la tabla 136 página 485 del Decker ( x=0 y β=30 °).
ZH=1,57
El valor de ZM se obtiene mediante la tabla 137 página 486 del Decker (Para un Acero St G-SnBz14).
ZM=222√ Nmm2
Sustituyendo en (12):
σ H=√ 253,312N
mm96,994 mm
×2,5+1
2,5×1,57 ×222√ N
mm2 ×0,6=399,87N
mm2

49
o Seguridad contra la formación de picaduras:
SH=σ HD× KL × Z R
σ H
; (13)
En donde σ HD representa la presión de rodadura permanente, ZR el factor de rugosidad para la calidad de la superficie de los flancos de los dientes que será igual a 1 en flancos de dientes con acabado fino y K L el factor del lubricante, el cual será igual a 1 para una correcta lubricación.
El valor deσ HD se obtiene mediante la tabla 134 página 481 del Decker, (Utilizando un material para las ruedas dentadas de la categoría de Aceros Ck 45).
σ HD=1100N
mm2
Sustituyendo en (13):
SH=1100
N
mm2×1×1
399,87N
mm2
=2,75
El valor obtenido de SH cumple con la condición que se exige para engranajes de marcha permanente, la cual, refleja lo siguiente: SH ≥ 1,25 para engranajes con Z ≥ 20.

50
o Fuerza periférica:
Fwt=F t× K t
Donde:
K t : Factor de servicio. Según la tabla 125 Pág 465 del Decker se tiene K t=1,75.
Por lo tanto:
Fwt=963,64 N ×1,75=1686,37 N
o Fuerza axial:
Fwa=Fwt ×tg βw
Donde:
βw : Ángulo de inclinación en el cilindro de rodadura, que puede tomarse ≈ β, debido a que la diferencia es muy pequeña.
Por lo tanto:
Fwa=1686,37 N × tg30 °=973,626 N

51
o Fuerza radial:
Fwr=Fwt ×tg α wt ; (14)
Donde:
α wt : Ángulo de engrane de trabajo. La Ec. 310 Pág. 460 del establece lo siguiente:
α tw=arcos( rt 3+rt 4
a×cos αt)
↓
α tw=arcos( 48,497 mm+121,24 mm169,74 mm
×cos 22,795°)=22,797 °
Sustituyendo en (14):
Fwr=1686,37 N ×tg22,797 °=708,78 N
o Peso aproximado :
Peso3= ρacero ∙ V olumen3
ρacero=7,85 × 10−6 kg
mm3
52
V olumen 3=b×π4
× d t 32=18,84 mm ×
π4
× (96,994 mm )2=139206,822 mm3
Por lo tanto:
Peso3=(7,85 ×10−6 kg
mm3 )×139206,822 mm3≅ 1,093 K g≅ 10,93 N
Peso4=ρacero ×V olumen 4
ρacero=7,85 × 10−6 kg
mm3
V olumen 4=b×π4
× d t 42=18,84 mm×
π4
× (242,487 mm )2=870056,99 mm3
Por lo tanto:
Peso4=(7,85× 10−6 k g
mm3 )×870056,99 mm3≅ 6,83 Kg≅ 62,3 N
Tercera etapa.
- Diámetro mínimo eje 3:

53
En primer lugar se calcula el diámetro mínimo permitido para el eje. Según Decker Pág. 233.
dmín=3√ T
0.2× τ t adm
; (3)
Donde:
T: Momento de torsión en servicio [ Nmm ].
τ t adm : Tensión de torsión admisible [ N
mm2 ]. Según tabla 72, Decker Pág
233.
Según la tabla mostrada anteriormente para ejes de transmisiones de St
42, se tiene que:
12N
mm2≤ τ t adm ≥18
N
mm2

54
Para efecto de nuestros cálculos vamos a seleccionar un valor de τ t adm=12
N
mm2 .
Por otra parte, se tiene que:
T=P3
ω3
× Fs
Donde: P3 :Potencia del eje 3 [ W ] .
ω3:Velocidad angular deleje 3 [ rads ] .
Fs: Factor de servicio del motor.
P3=P2 ×η2=3552W × 0,96=3409,92W
P4=P3× η3=3409,92 W × 0,96=3273,52 W
De manera que:
T= 3409,92W
292,66 rpm×( π30 )
×1,15=127,952 N . m=127952 N . mm
Por último, sustituyendo en (3):

55
dmín=3√ 127952 N ∙mm
0,2× 12[ Nmm2 ]
=37,63mm=3,763 cm
El diámetro primitivo del engranaje se encuentra ubicado dentro del intervalo de 1,2 a 2 veces el diámetro mínimo del eje, según la norma DIN 114. En nuestro caso seleccionaremos el valor de 1,2.
D p=1,2 × dmin=1,2 ×3,763 cm=4,515 cm
- Velocidad periférica o lineal en el diámetro primitivo:
V=D p ×ω× π
60=0,04515 m ×292,66 rpm × π
60=0,69
ms
- Módulo:
Según el procedimiento expuesto en el libro de “Maquinas” de A. L
Casillas Pág. 171, se tiene que:
m=√ PC ×1,52
; (4 )
Donde:
C : Carga de seguridad.P: Presión o esfuerzo tangencial del diente [Kg].

56
El valor de la carga de seguridad se obtiene del Casillas, Pág. 172, para aceros al cromo níquel Cr=0,45% - Ni=1 % el valor de C se encuentra entre 24
y 28. En nuestro caso seleccionaremos un valor de C = 25 Kg
mm2 .
El valor de P según Casillas, Pág.171, viene dado por la siguiente ecuación:
P=75 × FV
Donde:F : Fuerza a transmitir [CV] → F = 5 Hp = 5,07 CV
V : Velocidad periférica o lineal en el diámetro primitivo.
Sustituyendo:
P=75 ×5,07CV
0,69ms
=551,086 Kg
Por último, sustituyendo en (4):
m=√ 551,086 Kg
25kg
mm2 ×1,52=3,808 mm

57
Se procederá a elegir un modulo normalizado mediante la tabla 124 Pág 440 del Decker. Series de módulos en mm, según DIN 780. Tomando en cuenta que para aplicaciones industriales se recomienda que m≥3, se eligió un valor perteneciente a la serie 1 de mn= 4.
Alta producción.
- Número de dientes:
Se utilizará un ángulo de presión α=20°, según lo establecido en el Decker, Pág. 44. Para este ángulo existe un número mínimo de dientes el cual viene dado por:
Zg=2
sen2 α= 2
sen2(20 °)≅ 17 dientes
Tomando en cuenta lo establecido anteriormente como patrón para un número mínimo de dientes, seleccionaremos para el engranaje 5 un número de dientes igual a 36 ( Z5= 36).
Por otra parte:
i3=Z6
Z5

58
Por lo tanto, se tiene que:
Z6
Z5
=1,4 → Z6=1,4 × Z5=1,4 ×36=50,4≅ 51
ireal=5136
=1,416
- Cálculos geométricos:
o Paso normal:
Pn=π × mn=π × 4mm=12,566 mm
o Paso frontal:
Pf =π × mn
cosβ
Para engranajes helicoidales en ejes paralelos y ruedas de elevada velocidad, se recomienda una ángulo β=30º, según lo establecido en el Casillas Pág. 190. Por lo tanto:
Pf =π × 4 mmcos30 °
=14,51mm

59
o Módulo frontal:
mf =mn
cosβ= 4 mm
cos30 °=4,618 mm
o Diámetro primitivo:
d t 5=mn × Z5
cosβ=4 mm ×36
cos30 °=166,276 mm
d t 6=mn× Z6
cosβ=4 mm ×51
cos30 °=235,558 mm
o Altura de la cabeza del diente:
ha=1× mn=1 × 4mm=4 mm
o Altura del pie del diente:
h f=1,2 × mn=1,2× 4 mm=4,8 mm

60
o Diámetro del círculo de la cabeza:
d ta 5=d t 5+2ha=166,276 mm+(2×4 mm)=174,276 mm
d ta 6=d t 6+2 ha=235,558 mm+(2× 4 mm)=243,558 mm
o Diámetro del círculo del pie:
d tf 5=d t 5−2h f=166,276 mm−(2× 4,8 mm)=156,676 mm
d tf 6=d t 6−2h f=235,558 mm−(2× 4,8mm)=225,958 mm
o Ángulo de engrane frontal:
α t=arctg( tgαn
cosβ )=arctg( tg 20 °cos30 ° )=22,795°
o Diámetro del círculo base:
d tb 5=d t 5× cosα t=166,276 mm× cos22,795 °=153,289 mm
d tb 6=d t 6× cosα t=235,558 mm ×cos22,795 °=217,160 mm
o Ancho:
Según lo establecido en el Decker, Pág. 459, para conseguir una marcha silenciosa generalmente se elige de modo que:

61
¿¿Recubrimiento de salto)]
De modo que podemos obtener el ancho del engranaje de la siguiente manera:
ε B=b × tan β
P f
→ b=ε B ∙ P f
tan β=1 ×14,51 mm
tan 30 °=25,13 mm
o Paso del engrane:
Pe=Pn ×cos αt=12,566 mm × cos22,795 °=11,584 mm
o Distancia entre centros:
a5−6=d t 5+d t 6
2=166,276 mm+235,558 mm
2=200,91mm
o Recubrimiento del perfil:
ε α=√r ta 5
2−r tb 52+√rta6
2−rtb62−senα × a5−6
Pe
Sustituyendo:
ε α=√(174,276mm
2 )2
−(153,289 mm2 )
2
+√( 243,558 mm2 )
2
−( 217,160mm2 )
2
−sen20 °× 200,91mm
11,584 mm

62
↓
ε α=2,406
↓
2,406 ≥ 1,1
↓∴Es aceptable
- Cálculos resistivos:
o Fuerza periférica nominal:
F t=P3
V; (5)
Donde: P3 :Potencia nominal a transmitir por la rueda pequeña [W].
V : Velocidad periférica del círculo primitivo [ms ].
V=π ×d t 5 × n3
60=
π × (166,276 mm )× (292,66 rpm )60
×1m
1000 mm=2,547
ms
Sustituyendo en (5):
F t=3409,92 W
2,547ms
=1338,79 N
63
o Fuerza periférica de trabajo:
w=Ft
b× K t ; (6)
Donde: F t :Fuerza periférica nominal [N]. b : Ancho de los dientes [mm]. K t :Factor de trabajo.
Según lo establecido en la tabla 125 Pág 465 del Decker, el valor de K t
depende del tipo de máquina y del tipo de motor utilizado. En este caso se trata de una máquina estampadora y de un motor eléctrico (Electromotor). Por lo tanto, se tiene que:
K t=1.75 .
Sustituyendo en (6):
w=1338,79 N25,13 mm
×1,75=93,23N
mm
o Factor dinámico:

64
K v=1+(1+Cq
w )× C f ×V ;(7)
Donde: Cq=¿Índice de fuerza en relación con la calidad del dentado. C f =¿Coeficiente de carga.
w=¿ Fuerza especifica de trabajo [ Nmm ].
V=¿ Velocidad periférica del círculo primitivo [ms ].
Según lo establecido en la tabla 128 Pág 471 del Decker, se tiene que para nuestro valor de velocidad periférica la norma DIN 3963 presenta un error colectivo en la calidad de 9 a 8. Por lo cual, en nuestro caso seleccionaremos un valor de 8.
Con el valor seleccionado de error colectivo se prosigue a identificar el factor de fuerza y por último, se ubica el valor del coeficiente de carga. Todo esto, a través, de la tabla 130 Pág 476 del Decker, mostrada a continuación:

65
Cq=37N
mm
Cabe destacar que por tratarse de dentado inclinado solo se debe tomar en cuenta 0,75 veces el valor de la tabla correspondiente a C f , según lo establecido en la Pág 477 del Decker. Por lo tanto:
C f =0,75 ×0,032=0,024
Sustituyendo en (7):
K v=1+(1+37
Nmm
93,23N
mm)× 0,024 × 2,547=1,085
o Fuerza específica de carga:
66
w t=w × K v=93,23N
mm× 1,085=101,154
Nmm
o Fuerza periférica específica:
wFt=w t × K Fα ;(8)
Donde: K Fα :Factor de distribución de la carga frontal.
w t :Fuerza especifica de carga [ Nmm ].
El valor de k fα se encuentra de la siguiente manera:
1. Se buscan los valores de fpe, según tabla 127 Pág 468 del Decker (Utilizando el valor de calidad seleccionado anteriormente, el diámetro primitivo y el módulo).
f pe5=18 μm y f pe6=20 μm
Cabe destacar según lo establecido en la Pág 478 del Decker que debe tomarse el error admisible del paso de engrane es el correspondiente a la rueda 6 para realizar los cálculos. Por lo tanto:
f pe=20 μm
2. Se busca el error de engranaje fe, según tabla 131 Pág 478 del Decker.
f e=1× f pe=1 ×20 μm=20 μm
3. Se busca el factor auxiliar qL , según tabla 1321 página 479 del Decker
(Utilizando los valores de F t
by f e).
qL>1

67
4. Por último, se busca el valor de k fα, según tabla 1322 página 479 del Decker (Utilizando los valores de qL y ε α).
K fα=2,40
Sustituyendo en (8):
ωft=101,154N
mm×2,40=242,769
Nmm
o Esfuerzo de flexión:
σ f=ωft
mn
× Y f ×Y ϵ ×Y β ;(9)
En donde Y f representa el factor de forma del diente, Y βrepresenta el factor angular de inclinación (Para un valor de β=30 ° se tienequeY β=0,75 según lo establecido en la Pág 478 del Decker) y Y ϵ representa el factor de carga parcial que viene dado por lo siguiente:
Y ϵ=1ε α
= 12,406
≅ 0,415
68
Los valores de Y f se obtienen mediante la tabla 133 Pág 480 del Decker, (Utilizando un factor de distribución del perfil x = 0 y los números de dientes aparentes Zn).
Zn5=Z5
cos3 β= 36
cos330 °=55,42≅ 56
Zn6=Z6
cos3 β= 51
cos330 °=78,51≅ 79
Por lo tanto:
Y f 5=2,336 y Y f 6=2,267 ;(Interpolando)
Sustituyendo en (9):
σ F5=242,769
Nmm
4 mm×2,336 × 0,415 ×0,75=44,12
N
mm2
σ F6=242,769
Nmm
4 mm×2,267 × 0,415 ×0,75=42,82
N
mm2
o Seguridad contra la rotura por fatiga:
SF=σ FD × ZR ×Y s
σ F
;(10)

69
Donde:
Y s: Factor de entalladura. En nuestro caso se supondrá 0.95. ZR: Factor de rugosidad para la calidad de la superficie de los flancos en el pie del diente. En flancos de dientes limpios o rectificados 0.95 . σ fD :Resistencia a la fatiga por flexión del material. Los valores se obtienen mediante la tabla 134 Pág 481 del Decker, (Utilizando un material para las ruedas dentadas de la categoría de Aceros para bonificación templados por llama o por inducción Ck 45).
σ fD=270N
mm2
Sustituyendo en (10):
SF5=270
N
mm2×0,95× 0,95
44,12N
mm2
=5,52

70
SF6=270
N
mm2× 0,95× 0,95
42,82N
mm2
=5,69
Ambos casos cumplen con la condición que se exige para engranajes de marcha permanente, la cual, refleja lo siguiente:
S f ≥ 1,6.
Resistencia a la Rotura de los flancos
o Fuerza periférica específica:
wHt=w t × K Hα ;(11)
En donde k Hα representa el factor de distribución de la carga frontal y se obtiene de la siguiente manera:
1. Se busca el factor de recubrimiento Zϵ (Utilizando los valores de ε α y β), según tabla 1351 página 484 del Decker.
Zϵ=0,613 ;( Interpolando)
2. Se busca el valor de k Hα según tabla 1352 página 484 del Decker (Utilizando el valor encontrado anteriormente de Zϵ y el valor de qL).
k Hα=2,50
Sustituyendo en (11):

71
ωHt=101,154N
mm× 2,50=252,885
Nmm
o Presión de Hertz:
σ H=√ wHt
d t 5
×u5−6+1
u5−6
× ZH ×Z M ×Z ε; (12)
En donde ZH representa el factor de forma de los flancos y ZM el factor del material.
El valor de ZH se obtiene mediante la tabla 136 página 485 del Decker ( x=0 y β=30 °).
ZH=1,57
El valor de ZM se obtiene mediante la tabla 137 página 486 del Decker (Para un Acero St G-SnBz14).
ZM=222√ Nmm2
Sustituyendo en (12):
σ H=√ 252,885N
mm166,276 mm
×1,416+1
1,416×1,57 × 222√ N
mm2 ×0,613=344,17N
mm2
72
o Seguridad contra la formación de picaduras:
SH=σ HD× KL × Z R
σ H
; (13)
En donde σ HD representa la presión de rodadura permanente, ZR el factor de rugosidad para la calidad de la superficie de los flancos de los dientes que será igual a 1 en flancos de dientes con acabado fino y K L el factor del lubricante, el cual será igual a 1 para una correcta lubricación.
El valor deσ HD se obtiene mediante la tabla 134 página 481 del Decker, (Utilizando un material para las ruedas dentadas de la categoría de Aceros Ck 45).
σ HD=1100N
mm2
Sustituyendo en (13):
SH=1100
N
mm2×1×1
344,17N
mm2
=3,19
El valor obtenido de SH cumple con la condición que se exige para engranajes de marcha permanente, la cual, refleja lo siguiente: SH ≥ 1,25 para engranajes con Z ≥ 20.

73
o Fuerza periférica:
Fwt=F t ∙ K t
Donde:
K t : Factor de servicio. Según la tabla 125 Pág 465 del Decker se tiene K t=1.75.
Por lo tanto:
Fwt=1338,79 N × 1,75=2342,88 N
o Fuerza axial:
Fwa=Fwt ×tg βw
Donde:
βw : Ángulo de inclinación en el cilindro de rodadura, que puede tomarse ≈ β, debido a que la diferencia es muy pequeña.
Por lo tanto:
Fwa=2342,88 N × tg30 °=1352,66 N

74
o Fuerza radial:
Fwr=Fwt ∙ tgα wt ; (14)
Donde:
α wt : Ángulo de engrane de trabajo. La Ec. 310 Pág. 460 del establece lo siguiente:
α tw=arcos( rt 5+rt 6
a× cosα t)
↓
α tw=arcos( 83,138 mm+117,779mm200,91 mm
× cos22.795 °)=22,790 °
Sustituyendo en (14):
Fwr=2342,88 N × tg22,790 °=984,38 N
o Peso aproximado :
Peso5= ρacero×V olumen5
ρacero=7,85 × 10−6 kg
mm3

75
V olumen 5=b×π4
× d t 52=25,13 mm ×
π4
× (166,276 mm )2=545684,360 mm3
Por lo tanto:
Peso5=(7,85 ×10−6 kg
mm3 )×545684,360 mm3≅ 4,283 Kg≅ 42,83 N
Peso6= ρacero× V olumen6
ρacero=7,85 × 10−6 kg
mm3
V olumen 6=b×π4
× d t 62=25,13 mm ×
π4
× (235,558 mm )2=1095161,29 mm3
Por lo tanto:
Peso6=(7,85 ×10−6 kg
mm3 )×1095161,29 mm3≅ 8,59 Kg≅ 86 N
Baja producción.
- Número de dientes:
76
Se utilizará un ángulo de presión α=20°, según lo establecido en el Decker, Pág. 44. Para este ángulo existe un número mínimo de dientes el cual viene dado por:
Zg=2
sen2 α= 2
sen2(20 °)≅ 17 dientes
Tomando en cuenta lo establecido anteriormente como patrón para un número mínimo de dientes, seleccionaremos para el engranaje 7 un número de dientes igual a 25 (Z7= 25).
Por otra parte:
i4=Z8
Z7
Por lo tanto, se tiene que:
Z8
Z7
=2,48→ Z8=2,48× Z7=2,48 × 25=62
- Cálculos geométricos:
o Paso normal:
Pn=π × mn=π × 4mm=12,566 mm

77
o Paso frontal:
Pf =π × mn
cosβ
Para engranajes helicoidales en ejes paralelos y ruedas de elevada velocidad, se recomienda una ángulo β=30º, según lo establecido en el Casillas Pág. 190. Por lo tanto:
Pf =π × 4 mmcos30 °
=14,51mm
o Módulo frontal:
mf =mn
cosβ= 4 mm
cos30 °=4,618 mm
o Diámetro primitivo:
d t 7=mn× Z7
cosβ=4 mm ×25
cos30 °=115,470mm
d t 8=mn× Z8
cosβ=4 mm × 62
cos30 °=286,365 mm

78
o Altura de la cabeza del diente:
ha=1× mn=1 × 4mm=4 mm
o Altura del pie del diente:
h f=1,2 × mn=1,2× 4 mm=4,8 mm
o Diámetro del círculo de la cabeza:
d ta 7=d t 7+2ha=115,470 mm+(2 × 4 mm)=123,470 mm
d ta 8=d t 8+2 ha=286,365 mm+(2× 4 mm)=294,365 mm
o Diámetro del círculo del pie:
d tf 7=d t 7−2h f=115,470 mm−(2 ×4,8mm)=105,870 mm
d tf 8=d t 8−2h f=286,365 mm−(2× 4,8 mm)=276,765 mm
o Ángulo de engrane frontal:
α t=arctg( tgαn
cosβ )=arctg( tg 20 °cos30 ° )=22,795°
o Diámetro del círculo base:

79
d tb 7=d t 7× cosα t=115,470mm×cos 22,795°=106,451 mm
d tb 8=d t 8× cosα t=286,365 mm ×cos22,795 °=263,999 mm
o Ancho:
Según lo establecido en el Decker, Pág. 459, para conseguir una marcha silenciosa generalmente se elige de modo que:
¿¿Recubrimiento de salto)]
De modo que podemos obtener el ancho del engranaje de la siguiente manera:
ε B=b × tan β
P f
→ b=ε B ∙ P f
tan β=1 ×14,51 mm
tan 30 °=25,13 mm
o Paso del engrane:
Pe=Pn ×cos αt=12,566 mm × cos22,795 °=11,584 mm
o Distancia entre centros:
a7−8=d t 7+d t 8
2=115,470 mm+286,365 mm
2=200,91 mm
o Recubrimiento del perfil:
80
ε α=√r ta 7
2−r tb 72+√rta8
2−rtb 82−senα ×a7−8
Pe
Sustituyendo:
ε α=√(123,470mm
2 )2
−( 106,451 mm2 )
2
+√( 294,365mm2 )
2
−( 263,999 mm2 )
2
−sen20° ×200,91 mm
11,584 mm
↓
ε α=2,387
↓
2,387 ≥ 1,1
↓∴Es aceptable
- Cálculos resistivos:
o Fuerza periférica nominal:
F t=P3
V; (5)

81
Donde: P3 :Potencia nominal a transmitir por la rueda pequeña [W].
V : Velocidad periférica del círculo primitivo [ms ].
V=π ×d t 7 × n3
60=
π × (115,470 mm )× (292,66 rpm )60
×1m
1000 mm=1,769
ms
Sustituyendo en (5):
F t=3409,92 W
1,769ms
=1937,45 N
o Fuerza periférica de trabajo:
w=Ft
b× K t ; (6)
Donde: F t :Fuerza periférica nominal [N]. b : Ancho de los dientes [mm]. K t :Factor de trabajo.

82
Según lo establecido en la tabla 125 Pág 465 del Decker, el valor de K t
depende del tipo de máquina y del tipo de motor utilizado. En este caso se trata de una máquina estampadora y de un motor eléctrico (Electromotor). Por lo tanto, se tiene que:
K t=1.75 .
Sustituyendo en (6):
w=1937,45 N25,13 mm
×1,75=134,919N
mm
o Factor dinámico:
K v=1+(1+Cq
w )× C f ×V ;(7)
Donde: Cq=¿Índice de fuerza en relación con la calidad del dentado. C f =¿Coeficiente de carga.
w=¿ Fuerza especifica de trabajo [ Nmm ].
V=¿ Velocidad periférica del círculo primitivo [ms ].
Según lo establecido en la tabla 128 Pág 471 del Decker, se tiene que para nuestro valor de velocidad periférica la norma DIN 3963 presenta un error colectivo en la calidad de 9 a 8. Por lo cual, en nuestro caso seleccionaremos un valor de 8.

83
Con el valor seleccionado de error colectivo se prosigue a identificar el factor de fuerza y por último, se ubica el valor del coeficiente de carga. Todo esto, a través, de la tabla 130 Pág 476 del Decker, mostrada a continuación:
Cq=37N
mm
Cabe destacar que por tratarse de dentado inclinado solo se debe tomar en cuenta 0,75 veces el valor de la tabla correspondiente a C f , según lo establecido en la Pág 477 del Decker. Por lo tanto:
C f =0,75 ×0,0249=0,0186
84
Sustituyendo en (7):
K v=1+(1+37
Nmm
134,919N
mm)× 0,0186 ×1,769=1,042
o Fuerza específica de carga:
w t=w × K v=134,919N
mm×1,042=140,585
Nmm
o Fuerza periférica específica:
wFt=w t × K Fα ;(8)
Donde: K Fα :Factor de distribución de la carga frontal.
w t :Fuerza especifica de carga [ Nmm ].
El valor de k fα se encuentra de la siguiente manera:
1. Se buscan los valores de fpe, según tabla 127 Pág 468 del Decker (Utilizando el valor de calidad seleccionado anteriormente, el diámetro primitivo y el módulo).
f pe7=18 μm y f pe8=20 μm

85
Cabe destacar según lo establecido en la Pág 478 del Decker que debe tomarse el error admisible del paso de engrane es el correspondiente a la rueda 8 para realizar los cálculos. Por lo tanto:
f pe=20 μm
2. Se busca el error de engranaje fe, según tabla 131 Pág 478 del Decker.
f e=1× f pe=1 ×20 μm=20 μm
3. Se busca el factor auxiliar qL , según tabla 1321 página 479 del Decker
(Utilizando los valores de F t
by f e).
qL>1
4. Por último, se busca el valor de k fα, según tabla 1322 página 479 del Decker (Utilizando los valores de qL y ε α).
K fα=2,38
Sustituyendo en (8):
ωft=140,585N
mm× 2,38=334,592
Nmm
o Esfuerzo de flexión:

86
σ f=ωft
mn
× Y f ×Y ϵ ×Y β ;(9)
En donde Y f representa el factor de forma del diente, Y βrepresenta el factor angular de inclinación (Para un valor de β=30 ° se tienequeY β=0,75 según lo establecido en la Pág 478 del Decker) y Y ϵ representa el factor de carga parcial que viene dado por lo siguiente:
Y ϵ=1ε α
= 12,387
≅ 0,419
Los valores de Y f se obtienen mediante la tabla 133 Pág 480 del Decker, (Utilizando un factor de distribución del perfil x = 0 y los números de dientes aparentes Zn).
Zn7=Z7
cos3 β= 25
cos330 °=38,49≅ 39
Zn 8=Z8
cos3 β= 62
cos330 °=95,45≅ 96
Por lo tanto:
Y f 7=2,465 y Y f 8=2,221; (Interpolando)
Sustituyendo en (9):
87
σ F7=334,592
Nmm
4 mm×2,465 × 0,419× 0,75=64,79
N
mm2
σ F 8=334,592
Nmm
4 mm×2,221 ×0,419 × 0,75=58,38
N
mm2
o Seguridad contra la rotura por fatiga:
SF=σ FD × ZR ×Y s
σ F
;(10)
Donde:
Y s: Factor de entalladura. En nuestro caso se supondrá 0.95. ZR: Factor de rugosidad para la calidad de la superficie de los flancos en el pie del diente. En flancos de dientes limpios o rectificados 0.95 . σ fD :Resistencia a la fatiga por flexión del material. Los valores se obtienen mediante la tabla 134 Pág 481 del Decker, (Utilizando un material para las ruedas dentadas de la categoría de Aceros para bonificación templados por llama o por inducción Ck 45).

88
σ fD=270N
mm2
Sustituyendo en (10):
SF7=270
N
mm2×0,95× 0,95
64,79N
mm2
=3,76
SF8=270
N
mm2× 0,95× 0,95
58,38N
mm2
=4,17
Ambos casos cumplen con la condición que se exige para engranajes de marcha permanente, la cual, refleja lo siguiente:
S f ≥ 1,6.

89
Resistencia a la Rotura de los flancos
o Fuerza periférica específica:
wHt=w t × K Hα ;(11)
En donde k Hα representa el factor de distribución de la carga frontal y se obtiene de la siguiente manera:
1. Se busca el factor de recubrimiento Zϵ (Utilizando los valores de ε α y β), según tabla 1351 página 484 del Decker.
Zϵ=0,6158 ;(Interpolando)
2. Se busca el valor de k Hα según tabla 1352 página 484 del Decker (Utilizando el valor encontrado anteriormente de Zϵ y el valor de qL).
k Hα=2,50
Sustituyendo en (11):
ωHt=140,585N
mm×2,50=351,462
Nmm
o Presión de Hertz:
σ H=√ wHt
d t 7
×u7−8+1
u7−8
× ZH × ZM ×Z ε ;(12)
En donde ZH representa el factor de forma de los flancos y ZM el factor del material.

90
El valor de ZH se obtiene mediante la tabla 136 página 485 del Decker ( x=0 y β=30 °).
ZH=1,57
El valor de ZM se obtiene mediante la tabla 137 página 486 del Decker (Para un Acero St G-SnBz14).
ZM=222√ Nmm2
Sustituyendo en (12):
σ H=√ 351,462N
mm115,470 mm
×2,48+1
2,48× 1,57 ×222√ N
mm2 ×0,6158=443,56N
mm2
o Seguridad contra la formación de picaduras:
SH=σ HD× KL × Z R
σ H
; (13)
En donde σ HD representa la presión de rodadura permanente, ZR el factor de rugosidad para la calidad de la superficie de los flancos de los dientes que será igual a 1 en flancos de dientes con acabado fino y K L el factor del lubricante, el cual será igual a 1 para una correcta lubricación.

91
El valor deσ HD se obtiene mediante la tabla 134 página 481 del Decker, (Utilizando un material para las ruedas dentadas de la categoría de Aceros Ck 45).
σ HD=1100N
mm2
Sustituyendo en (13):
SH=1100
N
mm2×1×1
443,56N
mm2
=2,48
El valor obtenido de SH cumple con la condición que se exige para engranajes de marcha permanente, la cual, refleja lo siguiente: SH ≥ 1,25 para engranajes con Z ≥ 20.
o Fuerza periférica:
Fwt=F t ∙ K t
Donde:
K t : Factor de servicio. Según la tabla 125 Pág 465 del Decker se tiene K t=1.75.
Por lo tanto:
92
Fwt=1937,45 N × 1,75=3390,53 N
o Fuerza axial:
Fwa=Fwt ×tg βw
Donde:
βw : Ángulo de inclinación en el cilindro de rodadura, que puede tomarse ≈ β, debido a que la diferencia es muy pequeña.
Por lo tanto:
Fwa=3390,53 N ×tg 30 °=1957,52 N
o Fuerza radial:
Fwr=Fwt ∙ tgα wt ; (14)
Donde:
α wt : Ángulo de engrane de trabajo. La Ec. 310 Pág. 460 del establece lo siguiente:

93
α tw=arcos( rt 7+rt 8
a× cos αt)
↓
α tw=arcos( 57,735 mm+143,1825 mm200,91 mm
×cos 22.795°)=22,790 °
Sustituyendo en (14):
Fwr=3390,53 N × tg22,790 °=1424,55 N
o Peso aproximado :
Peso7= ρacero×V olumen7
ρacero=7,85 × 10−6 kg
mm3
V olumen 7=b×π4
× d t 72=25,13 mm ×
π4
× (115,470 mm )2=263160,5 mm3
Por lo tanto:
Peso7=(7,85 ×10−6 kg
mm3 )× 263160,5 mm3≅ 1,973 Kg≅ 19,73 N
94
Peso8= ρacero× V olumen8
ρacero=7,85 × 10−6 kg
mm3
V olumen 8=b ×π4
× d t 82=25,13 mm ×
π4
× (286,365 mm )2=1618535,55 mm3
Por lo tanto:
Peso 8=(7,85 ×10−6 kg
mm3 )×1618535,55 mm3≅ 12,7 Kg≅ 127 N
Lubricación.
La lubricación tiene que evitar el rozamiento en los flancos de los dientes y con ello el desgaste de los mismos y el calentamiento. La elección del tipo y de la cantidad del lubricante son de gran importancia en cuanto a desempeño y vida útil de los engranajes se refiere. Los lubricantes tienen que actuar de manera que en servicio permanente y con elevadas cargas no se sobrepase una temperatura de 60° C o como máximo 80° C, puesto que las temperaturas elevadas hacen disminuir las propiedades de engrase y además la duración del lubricante. Por otra parte, los lubricantes no deben producir efectos perjudiciales en otros

95
puntos como cojinetes, juntas y acoplamientos. En la tabla 129 del Decker Pág 474, se encuentran reflejados valores normativos de la viscosidad del aceite y el tipo de lubricación, según la velocidad periférica de las ruedas.
En nuestro caso se tiene lo siguiente:
v = 5,876ms → “Lubricación por inmersión. Viscosidad entre 47 y 94 cSt”
Ejes.
- Eje 1 (Eje de entrada).

96
Material utilizado AISI 4640, normalizado con las siguientes características (Según tabla AT7 del Faires):
Su=σu=10686kg
cm2
Sy=σ ad m=9140kg
cm2
Estática:
- Flexión.

97
σ adm≥Mfd2 I
↓
d= 3√ 32× Mfπ × σadm
Realizando los diagramas de fuerzas y momentos del eje, se obtienen los valores de las reacciones en los apoyos y el momento flector máximo.
Plano XY

98
Plano XZ
↓
M fmáx=48941,22 N .mm=489,4122 Kg .cm
Reacciones en los apoyos : F A=809,86 N y FB=407,84 N
Por lo tanto, tendremos que el diámetro por flexión será igual a:

99
d= 3√ 32 ×489,4122 Kg . cm
π × 9140kgrcm2
=0,817 cm=8,17 mm
- Torsión.
τ adm ≥16 × Mt
π ×d3
↓
d= 3√ 16 × M T
π ×τ adm
En donde:
τ adm=0,5 ×σ y=0,5 ×9140kg
cm2=4570
kg
cm2
Por lo tanto, tendremos que el diámetro del cojinete por torsión será igual a:
d= 3√ 16 ×225,73 Kg .cm
π × 4570kg
cm2
=0,631 cm=6,31 mm
Fatiga:

100
1N
=√( σ e
σn)
2
+( τ e
τn)
2
;(15)
En donde:
σ e=σn
σ f
× σm+K f × σa ;σ m=0 y σa=σmáx
↓
σ e=K f × σmáx=K f × M f × c
I=
K f × M fmáx ×d
2 π d4
64
=32× K f × M fmáx
π ×d3
τ e=τn
τ f
× τm+ K ft × τa; τm=τmáx y τa=0
↓
τ e=τn
τ f
× τm=τn
τ f
×( M T ×d
2 I 0)= τn
τ f
×( MT × d
2 π d4
32 )= τn
τ f
×16 × M T
π ×d3
Tomando las siguientes consideraciones:
Factor de tamaño=0,85 Factor de acabado=0,92
101
K f =K ft=1,6.(Según tabla AT 13 del Faires Página751).
σ ´ n=Su2
=10686
kg
cm2
2=5343
kgcm2
σ n=0,85 ×0,92 × σ ´n=0,85 × 0,92× 5343kg
cm2=4178,226
kg
cm2
τ n=0,6 × σn=0,6 × 4178,226kg
cm2=2506,93
kg
cm2
τ f=0,6 ×σ f=0,6 ×9140kg
cm2=5484
kg
cm2
Sustituyendo en (13):

102
1N
=√(32 ×1,6 × M fmáx
π ×d3
4178,226kg
cm2 )2
+(2506,93
kg
cm2
5484kg
cm2
×( 16 × M T
π × d3 )2506,93
kg
cm2)
2
Simplificando:
1N
=√( 0,0122cm2
Kg× M fmáx
π × d3 )2
+( 0,0029cm2
Kg× M T
π × d3 )2
Para un valor de N igual a 1,8 al despejar tendremos que el diámetro por fatiga será igual a:
d=3√ 1,8
π √(0,0122cm2
Kg× 489,4122 Kg. cm)
2
+(0,0029cm2
Kg×225,73 Kg . cm)
2
↓
d=1,51cm=15,1mm
Deformación por flexión:

103
Según la ecuación 163 página 241 del Decker, la flexión en el punto de apoyo viene dada por:
f A=( FA
3E )×[(L13
I 1)+(L2
3−L13
I 2)+( L3
3−L23
I3)+…]
En nuestro caso tendremos lo siguiente:
E=210000N
mm2; para los aceros ; I= π
64×d 4
Por lo tanto:
Fuerzas engranaje 1
f Axy=( AXY
3 E )[( L1 A3
I 1 A)+(L2 A
3−L1 A3
I 2 A)]
f Axy=( 225,50 N
3 ×210000N
mm2 )[( (20 mm )3
π64
(35 mm )4 )+( (50 mm )3−(20 mm )3
π64
(38 mm )4 )]f Axy=0,000448028 mm
f Bxy=(BXY
3 E )[( L1 B3
I 1 B)+(L2 B
3−L1 B3
I 2 B)+(L3 B
3−L2B3
I 3 B)]

104
f Bxy=( 247,58 N
3× 210000N
mm2 )[( (20 mm )3
π64
(35 mm )4 )+( (110mm )3−(20 mm )3
π64
(40 mm )4 )+( (120 mm )3−(110 mm )3
π64
(38 mm )4 )]f Bxy=0,005704323 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xy=f Axy+( f Bxy−f Axy )LA
LT
f xy=0,000448028 mm+(0,005704323 mm−0,000448028 mm ) × 50 mm280 mm
=0,001386652 mm
f Axz=( A XZ
3 E ) [( L1 A3
I 1 A)+( L2 A
3−L1 A3
I 2 A)]

105
f Axz=( 777,84 N
3× 210000N
mm2 )[( (20 mm )3
π64
(35 mm )4 )+( (50 mm )3− (20 mm )3
π64
(38 mm )4 )]f Axz=0,001545429 mm
f Bxz=(B XZ
3 E ) [( L1 B3
I 1 B)+( L2 B
3−L1 B3
I 2 B)+( L3 B
3−L2 B3
I 3 B)]
f Bxz=( 324,1 N
3×210000N
mm2 )[( (20 mm )3
π64
(35 mm )4 )+( (110 mm )3−(20 mm )3
π64
( 40 mm )4 )+( (120 mm )3− (110 mm )3
π64
(38 mm )4 )]f Bxz=0,007467369 mm
f xz=f Axz+( f Bxz−f Axz )LA
LT
f xz=0,001545429 mm+ (0,007467369 mm−0,001545429 mm )× 50 mm280 mm
=0,002602919 mm
f 1=√ f xy2+ f xz
2=√(0,001386652 mm )2+(0,002602919 mm )2=0,002949235 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,098 mm.

106
Acople
f Axy=( AXY
3 E )[( L1 A3
I 1 A)+(L2 A
3−L1 A3
I 2 A)]
f Axy=( 225,50 N
3 ×210000N
mm2 )[( (20 mm )3
π64
(35 mm )4 )+( (90 mm )3−(20 mm )3
π64
(33 mm ) 4 )]f Axy=0,004472056 mm
f Bxy=(BXY
3 E )[( L1 B3
I 1 B)+(L2 B
3−L1 B3
I 2 B)+(L3 B
3−L2B3
I 3 B)+( L4 B
3−L3B3
I 4 B)+( L5B
3−L4 B3
I 5B)]
f Bxy=( 247,58 N
3× 210000N
mm2 )[( (20 mm )3
π64
(35 mm )4 )+( (110mm )3−(20 mm )3
π64
(40 mm )4 )+( (150 mm )3−(110 mm )3
π64
(38 mm )4 )+( (190 mm )3−(150 mm )3
π64
(35 mm )4 )+( (260 mm )3−(190 mm )3
π64
(33 mm )4 )]f Bxy=0,102962341 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT

107
En nuestro caso, tendremos lo siguiente:
f xy=f Axy+( f Bxy−f Axy )LA
LT
f xy=0,004472056 mm+(0,102962341 mm−0,004472056 mm )× 90 mm280mm
=0,036129648 mm
f Axz=( A XZ
3 E ) [( L1 A3
I 1 A)+( L2 A
3−L1 A3
I 2 A)]
f Axz=( 777,84 N
3× 210000N
mm2 )[( (20 mm )3
π64
(35 mm )4 )+( (90 mm )3−(20 mm )3
π64
(33 mm )4 )]f Axz=0,015425916 mm
f Bxz=(B XZ
3 E ) [( L1 B3
I 1 B)+( L2 B
3−L1 B3
I 2 B)+( L3 B
3−L2 B3
I 3 B)+( L4 B
3−L3 B3
I 4 B)+( L5 B
3−L4 B3
I 5 B)]
f Bxz=( 324,1 N
3×210000N
mm2 )[( (20 mm )3
π64
(35 mm )4 )+( (110 mm )3−(20 mm )3
π64
( 40 mm )4 )+( (150 mm )3− (110 mm )3
π64
(38 mm )4 )+( (190 mm )3−(150 mm )3
π64
(35 mm )4 )+( (260 mm )3−(190 mm )3
π64
(33 mm )4 )]

108
f Bxz=0,134785099 mm
f xz=f Axz+( f Bxz−f Axz )LA
LT
f xz=0,015425916 mm+ (0,134785099 mm−0,015425916 mm ) × 90 mm280mm
=0,053791367 mm
f 2=√ f xy2+ f xz
2=√(0,036129648 mm )2+ (0,053791367 mm )2=0,064798631 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,098 mm.
feje1 = f1 + f2 = 0,002949235 mm+0,064798631mm=¿ 0,06774787 mm
Velocidad crítica:
Aplicando la misma metodología utilizada en los cálculos de deformación por flexión, se realizaron los diagramas de fuerzas producto de los pesos mediante el programa MDSolids para obtener las reacciones que se generan en los apoyos. Dichos valores se introducen en una hoja de cálculo de Excel que posee las ecuaciones pertinentes para el cálculo de la deformación. A continuación se reflejan los resultados obtenidos:

109
Fuerza engranaje 1
f 1=0,000013463 8mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,098 mm.
Acople
f 2=0,00 0912897 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,098 mm
- Por Rayleigh:
ωc=√ g× Σ ( P× f )Σ ( P× f 2)
ωc=√9,810m
s2×[ (4,51
Kg .ms2 × (1,34638 ×10−8m ))+(10
Kg .ms2 × (9,12897 ×10−7 m))
(4,51Kg . m
s2 × (1,34638 ×10−8m )2)+(10Kg .m
s2 × (9,12897 ×10−7 m)2) ]ωc=3288,832839 ×
1s=31406,0402rpm

110
- Por Dunkerley:
1ωc
=( 1ωc 1
+1
ωc 2
+1
ωc3
+…)
En nuestro caso
1ωc
= 1
√ g× ( P × f )Σ ( P × f 2 )
1ωc
= 1
√ 9,810m
s2 ×(4,51Kg . m
s2 × (1,34638 × 10−8 m ))4,51
Kg . ms2 × (1,34638 × 10−8 m )2
+ 1
√ 9,810m
s2 ×(10Kg .m
s2 × (9,12897 ×10−7 m))10
Kg .ms2 × (9,12897 ×10−7 m)2
1ωc
=0,000342101 s →ωc=2923,117213×1s=27913,7132 rpm
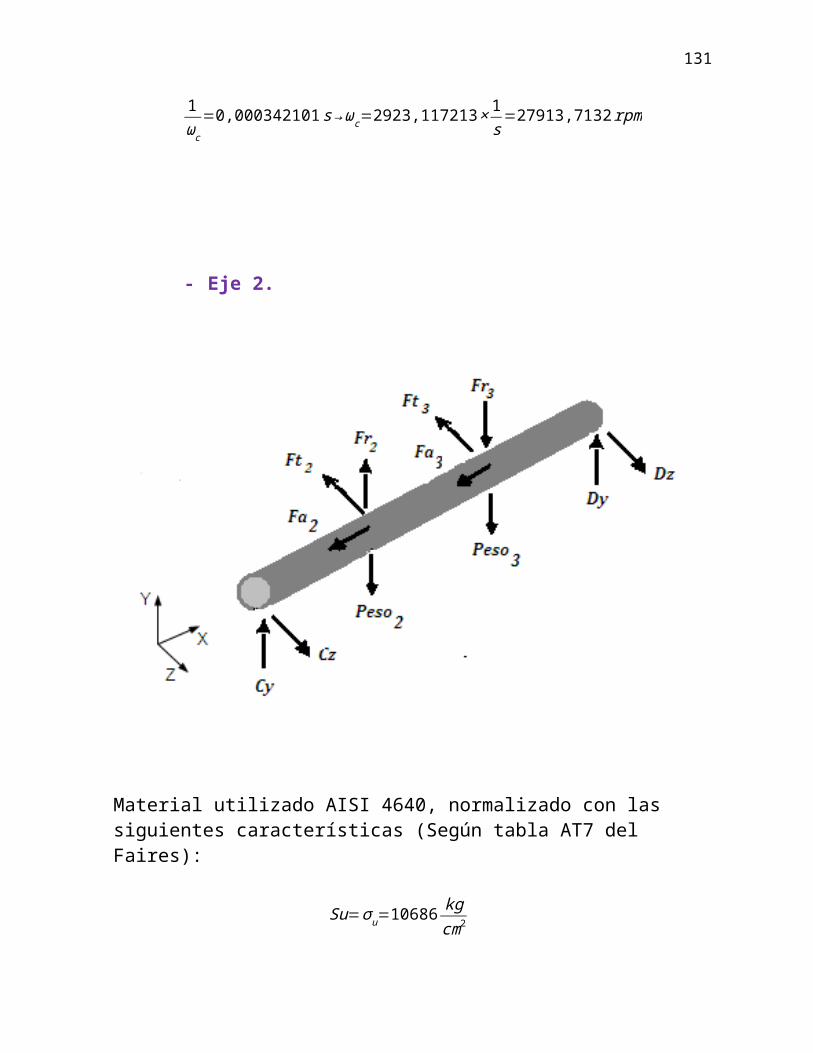
- Eje 2.

111
Material utilizado AISI 4640, normalizado con las siguientes características (Según tabla AT7 del Faires):
Su=σu=10686kg
cm2
Sy=σ adm=9140kg
cm2
Estática:
- Flexión.

112
σ adm≥Mfd2 I
↓
d= 3√ 32× Mfπ × σadm
Realizando los diagramas de fuerzas y momentos del eje, se obtienen los valores de las reacciones en los apoyos y el momento flector máximo.
Plano XY

113
Plano XZ
↓

114
M fmáx=112251,03 N .mm=1122,5103 Kg . cm
Reacciones en los apoyos : FC=1423,36 N y FD=1405,11 N
Por lo tanto, tendremos que el diámetro por flexión será igual a:
d= 3√ 32 ×1122,5103 Kg . cm
π ×9140kg
cm2
=1,07 cm=10,7 mm
- Torsión.
τ adm ≥16 × Mt
π ×d3
↓
d= 3√ 16 × M T
π ×τ adm
En donde:
τ adm=0,5 ×σ y=0,5 ×9140kg
cm2=4570
kg
cm2
Por lo tanto, tendremos que el diámetro del cojinete por torsión será igual a:
d= 3√ 16 ×537,43 Kg .cm
π × 4570kg
cm2
=0,842 cm=8,42 mm
Fatiga:

115
1N
=√( σ e
σn)
2
+( τ e
τn)
2
;(15)
En donde:
σ e=σn
σ f
× σm+K f × σa ;σ m=0 y σa=σmáx
↓
σ e=K f × σmáx=K f × M f × c
I=
K f × M fmáx ×d
2 π d4
64
=32× K f × M fmáx
π ×d3
τ e=τn
τ f
× τm+ K ft × τa; τm=τmáx y τa=0
↓
τ e=τn
τ f
× τm=τn
τ f
×( M T ×d
2 I 0)= τn
τ f
×( MT × d
2 π d4
32 )= τn
τ f
×16 × M T
π ×d3
Tomando las siguientes consideraciones:
Factor de tamaño=0,85 Factor de acabado=0,92

116
K f =K ft=1,6.(Según tabla AT 13 del Faires Página751).
σ ´ n=Su2
=10686
kg
cm2
2=5343
kgcm2
σ n=0,85 ×0,92 × σ ´n=0,85 × 0,92× 5343kg
cm2=4178,226
kg
cm2
τ n=0,6 × σn=0,6 × 4178,226kg
cm2=2506,93
kg
cm2
τ f=0,6 ×σ f=0,6 ×9140kg
cm2=5484
kg
cm2
Sustituyendo en (13):
1N
=√(32 ×1,6 × M fmáx
π ×d3
4178,226kg
cm2 )2
+(2506,93
kg
cm2
5484kg
cm2
×( 16 × M T
π × d3 )2506,93
kg
cm2)
2
117
Simplificando:
1N
=√( 0,0122cm2
Kg× M fmáx
π × d3 )2
+( 0,0029cm2
Kg× M T
π × d3 )2
Para un valor de N igual a 1,8 al despejar tendremos que el diámetro por fatiga será igual a:
d=3√ 1,8
π √(0,0122cm2
Kg×1122,5103 Kg.cm)
2
+(0,0029cm2
Kg×537,43 Kg .cm)
2
↓
d=1,99cm=19,9 mm
Deformación:
Según la ecuación 163 página 241 del Decker, la flexión en el punto de apoyo viene dada por:
f A=( FA
3E )×[(L13
I 1)+(L2
3−L13
I 2)+( L3
3−L23
I3)+…]
En nuestro caso tendremos lo siguiente:

118
E=210000N
mm2; para los aceros ; I= π
64×d 4
Por lo tanto:
Fuerzas engranaje 2
f Cxy=(CXY
3 E )[( L1 C3
I 1 C)+( L2 C
3−L1C3
I 2C)]
f Cxy=( 45,71 N
3× 210000N
mm2 ) [( (20 mm )3
π64
(50 mm ) 4 )+( (50 mm )3−(20 mm )3
π64
(55 mm )4 )]f Cxy=0,00002079 mm
f Dxy=( DXY
3 E ) [(L1 D3
I1B)+( L2 D
3−L1 D3
I2 D)+( L3D
3−L2 D3
I 3D)+( L4D
3−L4 D3
I 4 D)]
f Dxy=( 330,56 N
3×210000N
mm2 )[( (20 mm )3
π64
(50 mm )4 )+( (80 mm )3−(20 mm )3
π64
(55 mm )4 )+( (110mm )3− (80 mm )3
π64
(60 mm )4 )+( (120 mm )3−(110mm )3
π64
(55 mm )4 )]f Dxy=0,001741652 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:

119
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xy=f Cxy +(f Dxy−f Cxy )LC
LT
f xy=0,00002079 mm+(0,001741652 mm−0,00002079 mm ) × 50 mm210 mm
=0,00043052 mm
f Cxz=(CXZ
3E ) [(L1 C3
I 1C)+(L2 C
3−L1 C3
I 2 C)]
f Cxz=( 1422,63 N
3×210000N
mm2 )[( (20 mm )3
π64
(50 mm )4 )+( (50 mm )3−(20 mm )3
π64
(55 mm )4 )]f Cxz=0,000647072 mm
f Dxz=( DXZ
3 E )[( L1 D3
I 1 B)+( L2 D
3−L1 D3
I 2 D)+(L3 D
3−L2 D3
I 3 D)+( L4 D
3−L4 D3
I 4 D)]

120
f Dxz=( 1365,68 N
3 ×210000N
mm2 )[( (20 mm )3
π64
(50 mm )4 )+( (80 mm )3−(20 mm )3
π64
(55 mm )4 )+( (110mm )3−(80 mm )3
π64
(60 mm ) 4 )+( (120 mm )3−(110 mm )3
π64
(55 mm )4 )]f Dxz=0,007467369 mm
f xz=f Cxz+( f Dxz−f Cxz )LC
LT
f xz=0,000647072 mm+(0,007467369 mm−0,000647072 mm ) × 50 mm210 mm
=0,002206217 mm
f 1=√ f xy2+ f xz
2=√(0,00043052 mm )2+(0,002206217 mm )2=0,002247831 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,0735 mm.
Fuerzas engranaje 3
f Cxy=(CXY
3 E )[( L1 C3
I 1 C)+( L2 C
3−L1C3
I 2C)+( L3 C
3−L2C3
I3 C)+( L4 C
3−L3 C3
I 4 C)]
f Cxy=( 45,71 N
3× 210000N
mm2 ) [( (20 mm )3
π64
(50 mm ) 4 )+( (60 mm )3−(20 mm )3
π64
(55 mm )4 )+( (90 mm )3−(60 mm )3
π64
(60 mm )4 )+( (105 mm )3− (90 mm )3
π64
(55 mm )4 )]

121
f Cxy=0,000163233 mm
f Dxy=( DXY
3 E ) [(L1 D3
I1B)+( L2 D
3−L1 D3
I2 D)]
f Dxy=( 330,56 N
3×210000N
mm2 )[( (20 mm )3
π64
(50 mm )4 )+( (65 mm )3−(20 mm )3
π64
(55 mm )4 )]f Dxy=0,000325133mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xy=f Cxy +(f Dxy−f Cxy )LC
LT
f xy=0,000163233 mm+(0,000325133 mm−0,000163233 mm ) × 105 mm210 mm
=0,000244183 mm

122
f Cxz=(CXZ
3E ) [(L1 C3
I 1C)+(L2 C
3−L1 C3
I 2 C)+( L3 C
3−L2 C3
I 3 C)+( L4 C
3−L3C3
I 4 C)]
f Cxz=( 1422,63 N
3×210000N
mm2 )[( (20 mm )3
π64
(50 mm )4 )+( (60 mm )3−(20 mm )3
π64
(55 mm )4 )+( (90 mm )3− (60 mm )3
π64
(60 mm )4 )+( (105 mm )3−(90 mm )3
π64
(55 mm )4 )]f Cxz=0,005080291 mm
f Dxz=( DXZ
3 E )[( L1 D3
I 1 B)+( L2 D
3−L1 D3
I 2 D)]
f Dxz=( 1365,68 N
3 ×210000N
mm2 )[( (20 mm )3
π64
(50 mm )4 )+( (65 mm )3−(20 mm )3
π64
(55 mm )4 )]f Dxz=0,00134326mm
f xz=f Cxz+( f Dxz−f Cxz )LC
LT
f xz=0,005080291 mm+(0,00134326 mm−0,005080291 mm )× 105 mm210 mm
=0,003211775 mm

123
f 2=√ f xy2+ f xz
2=√(0,000244183 mm )2+ (0,003211775mm )2=0,003221044 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,0735 mm.
feje2 = f1 + f2 = 0,002247831 mm+0,003221044 mm=¿ 0,00546887mm
Velocidad crítica:
Aplicando la misma metodología utilizada en los cálculos de deformación por flexión, se realizaron los diagramas de fuerzas producto de los pesos mediante el programa MDSolids para obtener las reacciones que se generan en los apoyos. Dichos valores se introducen en una hoja de cálculo de Excel que posee las ecuaciones pertinentes para el cálculo de la deformación. A continuación se reflejan los resultados obtenidos:
Fuerza engranaje 2
f 1=0,000017315 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,0735 mm.

124
Fuerza engranaje 3
f 2=0,00 0012456 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,0735 mm
- Por Rayleigh:
ωc=√ g × Σ ( P× f )Σ ( P× f 2)
ωc=√9,810m
s2×[ (28,22
Kg . ms2 × (1,73153 × 10−8 m ))+(10 .93
Kg . ms2 × (1,24569 ×10−8 m))
(28,22Kg .m
s2 × ( 1,73153× 10−8 m )2)+(10 , 93Kg . m
s2 × (1,24569 ×10−8 m)2) ]ωc=24565,16289 ×
1s=234580,0261rpm

125
- Por Dunkerley:
1ωc
=( 1ωc 1
+1
ωc 2
+1
ωc3
+…)
En nuestro caso
1ωc
= 1
√ g× ( P × f )Σ ( P × f 2 )
1ωc
= 1
√ 9,810m
s2 ×(28,22Kg .m
s2 × (1,73153 ×10−8 m))28,22
Kg . ms2 × (1,73153 ×10−8m )2
+ 1
√ 9,810m
s2 ×(10,93Kg . m
s2 × (1,24569 ×10−8 m ))10 , 93
Kg . ms2 × (1,24569 ×10−8 m )2
1ωc
=0,000077647 s→ ωc=1 2878 ,7521 ×1s=12 2983 , 0235 rpm

126
- Eje 3.
Material utilizado AISI 4640, normalizado con las siguientes características (Según tabla AT7 del Faires):
Su=σu=10686kg
cm2
Sy=σ adm=9140kg
cm2

127
Estática:
- Flexión.
σ adm≥Mfd2 I
↓
d= 3√ 32× Mfπ × σadm
Realizando los diagramas de fuerzas y momentos del eje, se obtienen los valores de las reacciones en los apoyos y el momento flector máximo.
Plano XY

128
Plano XZ

129
↓
M fmáx=270333,70 N . mm=2703,3370 Kg. cm
Reacci onesen los apoyos : FG=1928,67 N y FH=3298,65 N
Por lo tanto, tendremos que el diámetro por flexión será igual a:
d= 3√ 32 ×2703,3370 Kg .cm
π × 9140kg
cm2
=1,44 cm=14,4 mm
- Torsión.
τ adm≥16 × Mt
π ×d3
↓

130
d= 3√ 16 × M T
π ×τ adm
En donde:
τ adm=0,5 ×σ y=0,5 ×9140kg
cm2=4570
kg
cm2
Por lo tanto, tendremos que el diámetro del cojinete por torsión será igual a:
d= 3√ 16 ×1279,52 Kg .cm
π × 4570kg
cm2
=1,12 cm=11,2 mm
Fatiga:
1N
=√( σ e
σn)
2
+( τ e
τn)
2
;(15)
En donde:
σ e=σn
σ f
× σm+K f × σa ;σ m=0 y σa=σmáx
↓
131
σ e=K f × σmáx=K f × M f × c
I=
K f × M fmáx ×d
2 π d4
64
=32× K f × M fmáx
π ×d3
τ e=τn
τ f
× τm+ K ft × τa; τm=τmáx y τa=0
↓
τ e=τn
τ f
× τm=τn
τ f
×( M T ×d
2 I 0)= τn
τ f
×( MT × d
2 π d4
32 )= τn
τ f
×16 × M T
π ×d3
Tomando las siguientes consideraciones:
Factor de tamaño=0,85 Factor de acabado=0,92
K f =K f t=1,6.(Según tabla AT 13 del Faires Página751) .
σ ´ n=Su2
=10686
kg
cm2
2=5343
kgcm2
σ n=0,85 ×0,92 × σ ´n=0,85 × 0,92× 5343kg
cm2=4178,226
kg
cm2

132
τ n=0,6 × σn=0,6 × 4178,226kg
cm2=2506,93
kg
cm2
τ f=0,6 ×σ f=0,6 ×9140kg
cm2=5484
kg
cm2
Sustituyendo en (13):
1N
=√(32 ×1,6 × M fmáx
π ×d3
4178,226kg
cm2 )2
+(2506,93
kg
cm2
5484kg
cm2
×( 16 × M T
π × d3 )2506,93
kg
cm2)
2
Simplificando:
1N
=√( 0,0122cm2
Kg× M fmáx
π × d3 )2
+( 0,0029cm2
Kg× M T
π × d3 )2
Para un valor de N igual a 1,8 al despejar tendremos que el diámetro por fatiga será igual a:
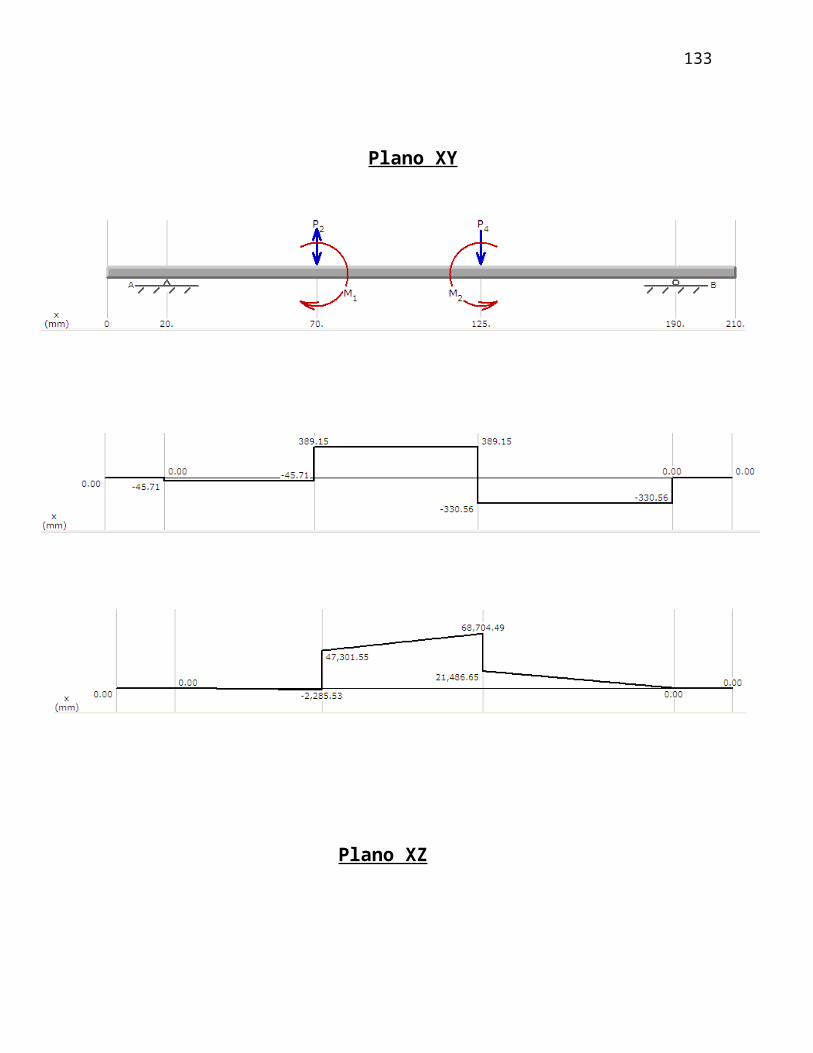
133
d=3√ 1,8
π √(0,0122cm2
Kg× 2703,3370 Kg . cm)
2
+(0,0029cm2
Kg×1279,52 Kg. cm)
2
↓
d=2,68cm=26,8 mm
Deformación:
Según la ecuación 163 página 241 del Decker, la flexión en el punto de apoyo viene dada por:
f A=( FA
3E )×[(L13
I 1)+(L2
3−L13
I 2)+( L3
3−L23
I3)+…]
En nuestro caso tendremos lo siguiente:
E=210000N
mm2; para los aceros ; I= π
64×d 4
Por lo tanto:
Fuerzas engranaje 4
f Gxy=(GXY
3 E )[( L1 G3
I 1 G)+( L2G
3−L1 G3
I 2G)]

134
f Gxy=( 130.03 N
3 ×210000N
mm2 )[( (25 mm )3
π64
(65 mm )4 )+( (100 mm )3−(25 mm )3
π64
(68 mm ) 4 )]f Gxy=0,000197259 mm
f Hxy=( H XY
3 E ) [(L1 H3
I 1 H)+( L2 H
3−L1H3
I 2 H)+( L3 H
3−L2 H3
I 3 H)+(L4 H
3−L3 H3
I 4 H)+( L5 H
3−L4H3
I 5 H)]
f Hxy=( 970,66 N
3×210000N
mm2 )[( (25 mm )3
π64
(65 mm )4 )+( ( 95 mm )3−(25 mm )3
π64
(71 mm )4 )+( (165 mm )3−( 95 mm )3
π64
(74 mm )4 )+( (245 mm )3−(165 mm )3
π64
(71mm )4 )+( (260 mm )3−(245 mm )3
π64
(68 mm )4 ) ]f Hxy=0,021700584 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xy=f Gxy+( f Hxy−f Gxy )LG
LT

135
f xy=0,000197259 mm+(0,021700584 mm−0,000197259 mm )× 100mm410 mm
=0,005441973 mm
f Gxz=(GXz
3 E ) [( L1G3
I 1 G)+( L2 G
3−L1 G3
I 2G)]
f Gxz=( 1924.29 N
3× 210000N
mm2 )[( (25 mm )3
π64
(65 mm )4 )+( (100 mm )3−(25 mm )3
π64
(68 mm )4 )]f Gxz=0,002919205 mm
f Hxz=( H XZ
3 E )[( L1 H3
I 1 H)+(L2 H
3−L1 H3
I 2 H)+( L3 H
3−L2H3
I 3H)+( L4 H
3−L3 H3
I 4 H)+(L5 H
3−L4 H3
I 5 H)]
f Hxz=( 3152,61 N
3 ×210000N
mm2 )[( (25 mm )3
π64
(65 mm )4 )+( (95 mm )3− (25 mm )3
π64
(71 mm )4 )+( (165 mm )3−(95 mm )3
π64
(74 mm )4 )+( (245 mm )3−(165 mm )3
π64
(71 mm )4 )+( (260 mm )3−(245 mm )3
π64
(68 mm )4 )]f Hxz=0,070481401 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:

136
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xz=f Gxz+( f Hxz−f Gxz )LG
LT
f xz=0,002919205 mm+ (0,070481401mm−0,002919205 mm )× 100 mm410 mm
=0,019397789 mm
f 1=√ f xy2+ f xz
2=√(0,005441973 mm )2+(0,019397789 mm )2=0,020146694 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,1435 mm.
Fuerzas engranaje 7
f Gxy=(GXY
3 E )[( L1 G3
I 1 G)+( L2G
3−L1 G3
I 2G)+(L3G
3−L2G3
I3 G)+( L4 G
3−L3 G3
I 4 G)+( L5 G
3−L4 G3
I 5 G)]
f Gxy=( 130.03 N
3 ×210000N
mm2 )[( (25 mm )3
π64
(65 mm )4 )+( (115mm )3−(25 mm )3
π64
(68 mm )4 )+( (195 mm )3−(115mm )3
π64
(71 mm )4 )+( (265 mm )3− (195 mm )3
π64
(74 mm )4 )+( (285 mm )3−(265 mm )3
π64
(71mm )4 )]
137
f Gxy=0,003595758 mm
f Hxy=( H XY
3 E ) [(L1 H3
I 1 H)+( L2 H
3−L1H3
I 2 H)]
f Hxy=( 970,66 N
3×210000N
mm2 )[( (25 mm )3
π64
(65 mm )4 )+( (75 mm )3−(25 mm )3
π64
(71mm )4 )]f Hxy=0,000529258mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xy=f Gxy+( f Hxy−f Gxy )LG
LT
f xy=0,003595758 mm+(0,000529258 mm−0,003595758 mm ) × 285 mm410 mm
=0,001464167 mm

138
f Gxz=(GXz
3 E ) [( L1G3
I 1 G)+( L2 G
3−L1 G3
I 2G)+( L3 G
3−L2 G3
I 3 G)+( L4 G
3−L3G3
I 4 G)+( L5 G
3−L4 G3
I 5 G)]
f Gxz=( 1924.29 N
3× 210000N
mm2 )[( (25 mm )3
π64
(65 mm )4 )+( (115mm )3−(25 mm )3
π64
(68 mm ) 4 )+( (195 mm )3−(115 mm )3
π64
(71 mm )4 )+( (265 mm )3−(195 mm )3
π64
(74 mm )4 )+( (285 mm )3−(265 mm )3
π64
(71 mm )4 )]f Gxz=0,053212962 mm
f Hxz=( H XZ
3 E )[( L1 H3
I 1 H)+(L2 H
3−L1 H3
I 2 H)]
f Hxz=( 3152,61 N
3 ×210000N
mm2 )[( (25 mm )3
π64
(65 mm )4 )+( (75 mm )3−(25 mm )3
π64
(71 mm )4 )]f Hxz=0,001718979 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:

139
f xz=f Gxz+( f Hxz−f Gxz )LG
LT
f xz=0,053212962 mm+(0,001718979 mm−0,053212962 mm ) × 285 mm410 mm
=0,017418364 mm
f 2=√ f xy2+ f xz
2=√(0,001464167 mm )2+ (0,017418364 mm )2=0,017479794 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,1435 mm.
feje3 = f1 + f2 = 0,020146694 mm+0,017479794 mm=¿ 0,03762649mm
- Eje 4 (Eje de salida).

140
Material utilizado AISI 4640, normalizado con las siguientes características (Según tabla AT7 del Faires):
Su=σu=10686kg
cm2
Sy=σ adm=9140kg
cm2
Estática:
- Flexión.

141
σ adm≥Mfd2 I
↓
d= 3√ 32× Mfπ × σadm
Realizando los diagramas de fuerzas y momentos del eje, se obtienen los valores de las reacciones en los apoyos y el momento flector máximo.
Plano XY

142
Plano XZ

143
↓
M fmáx=346891,54 N . mm=3468,9154 Kg . cm
Reacciones en los apoyos : F I=1384,10 N y FJ=2596,76 N
Por lo tanto, tendremos que el diámetro por flexión será igual a:
d= 3√ 32 ×3468,9154 Kg .cm
π × 9140kg
cm2
=1,56 cm=15,6 mm
- Torsión.
τ adm ≥16 × Mt
π ×d3
↓
d= 3√ 16 × M T
π ×τ adm
En donde:
τ adm=0,5 ×σ y=0,5 ×9140kg
cm2=4570
kg
cm2
Por lo tanto, tendremos que el diámetro del cojinete por torsión será igual a:

144
d= 3√ 16 ×3046,30 Kg . cm
π × 4570kgcm2
=1,50 cm=15 mm
Fatiga:
1N
=√( σ e
σn)
2
+( τ e
τn)
2
;(15)
En donde:
σ e=σn
σ f
× σm+K f × σa ;σ m=0 y σa=σmáx
↓
σ e=K f × σmáx=K f × M f × c
I=
K f × M fmáx ×d
2 π d4
64
=32× K f × M fmáx
π ×d3

145
τ e=τn
τ f
× τm+ K ft × τa; τm=τmáx y τa=0
↓
τ e=τn
τ f
× τm=τn
τ f
×( M T ×d
2 I 0)= τn
τ f
×( MT × d
2 π d4
32 )= τn
τ f
×16 × M T
π ×d3
Tomando las siguientes consideraciones:
Factor de tamaño=0,85 Factor de acabado=0,92
K f =K ft=1,6.(Según tabla AT 13 del Faires Página751).
σ ´ n=Su2
=10686
kg
cm2
2=5343
kgcm2
σ n=0,85 ×0,92 × σ ´n=0,85 × 0,92× 5343kg
cm2=4178,226
kg
cm2
τ n=0,6 × σn=0,6 × 4178,226kg
cm2=2506,93
kg
cm2

146
τ f=0,6 ×σ f=0,6 ×9140kg
cm2=5484
kg
cm2
Sustituyendo en (13):
1N
=√(32 ×1,6 × M fmáx
π ×d3
4178,226kg
cm2 )2
+(2506,93
kg
cm2
5484kg
cm2
×( 16 × M T
π × d3 )2506,93
kg
cm2)
2
Simplificando:
1N
=√( 0,0122cm2
Kg× M fmáx
π × d3 )2
+( 0,0029cm2
Kg× M T
π × d3 )2
Para un valor de N igual a 1,8 al despejar tendremos que el diámetro por fatiga será igual a:
d=3√ 1,8
π √(0,0122cm2
Kg× 3468,9154 Kg.cm)
2
+(0,0029cm2
Kg×3046,30 Kg .cm)
2
↓
d=2,95cm=29,5 mm

147
Deformación:
Según la ecuación 163 página 241 del Decker, la flexión en el punto de apoyo viene dada por:
f A=( FA
3E )×[(L13
I 1)+(L2
3−L13
I 2)+( L3
3−L23
I3)+…]
En nuestro caso tendremos lo siguiente:
E=210000N
mm2; para los aceros ; I= π
64×d 4
Las especificaciones del eje estriado se tomaron según lo establecido la tabla 41 Pág 155 del Decker.

148
Por lo tanto:
Fuerzas engranaje 8
f Ixy=( I XY
3 E ) [(L1 I3
I 1 I)+( L2 I
3−L1 I3
I2 I)+( L3 I
3−L2 I3
I3 I)]
f Ixy=( 1133.25 N
3×210000N
mm2 )[( (25 mm )3
π64
(80 mm )4 )+( (115 mm )3− (25 mm )3
π64
(88 mm )4 )+( (245 mm )3−(115mm )3
π64 ( 82 mm+95 mm
2 )4 )]
f Ixy=0,008810229 mm
f Jxy=( J XY
3 E ) [(L1J3
I 1 J)+( L2 J
3−L1 J3
I 2 J)]

149
f Jxy=( 68,30 N
3 ×210000N
mm2 )[( (25 mm )3
π64
(80 mm )4 )+( (75 mm )3− (25 mm )3
π64 ( 82 mm+95 mm
2 )4 )]
f Jxy=0,000015468mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xy=f Ixy+( f Jxy−f Ixy )L I
LT
f xy=0,008810229 mm+(0,000015468 mm−0,008810229 mm ) × 245mm440mm
=0,003913147 mm
f Ixz=( I Xz
3 E )[( L1 I3
I 1 I)+( L2 I
3−L1 I3
I 2 I)+(L3 I
3−L2 I3
I 3 I)]
f Ixz=( 794.66 N
3 × 210000N
mm2 )[( (25 mm )3
π64
(80 mm )4 )+( (115mm )3−(25 mm )3
π64
(88 mm )4 )+( (245 mm )3−(115 mm )3
π64 ( 82 mm+95 mm
2 )4 )]

150
f Ixz=0,006177928 mm
f Jxz=( J XZ
3 E )[( L1 J3
I1J)+(L2 J
3−L1 J3
I2 J)]
f Jxz=( 2595,87 N
3×210000N
mm2 )[( (25 mm )3
π64
(80 mm )4 )+( (75 mm )3−(25 mm )3
π64 ( 82mm+95 mm
2 )4 )]
f Jxz=0,000587916 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xz=f Ixz+ (f Jxz−f Ixz )LI
LT
f xz=0,006177928 mm+ (0,000587916 mm−0,006177928 mm )× 245mm440mm
=0,003065308 mm
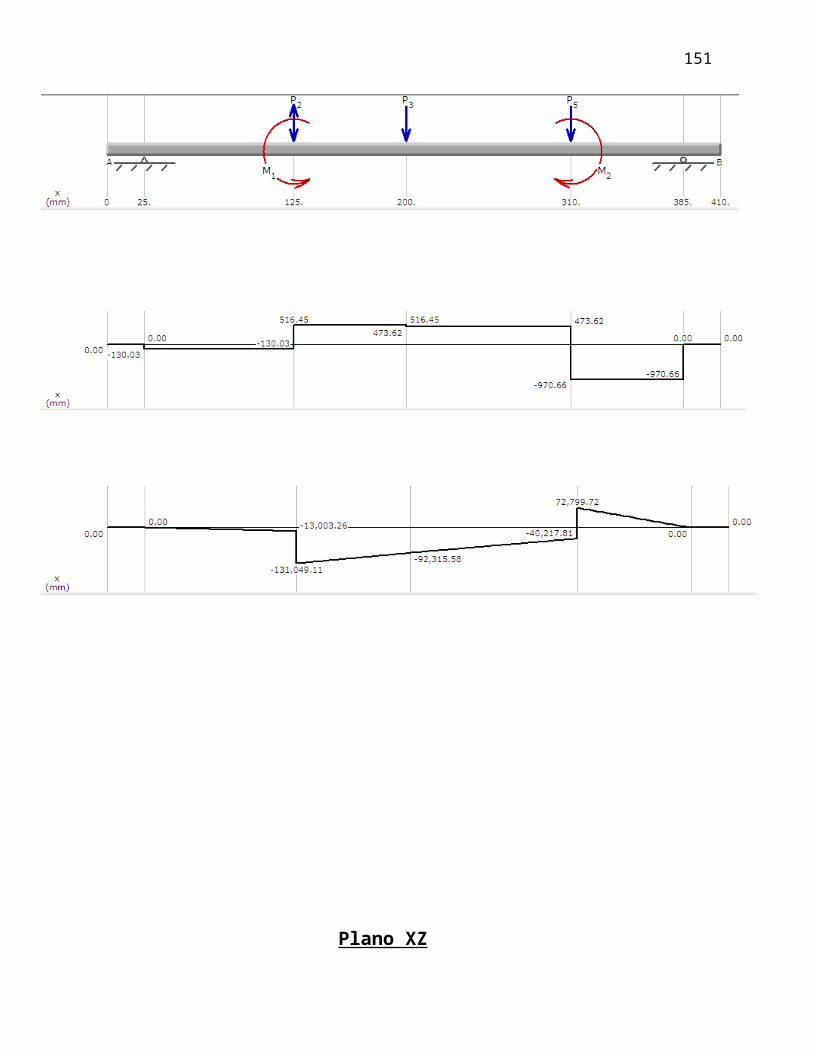
151
f 1=√ f xy2+ f x z
2=√ (0,003913147 mm )2+ (0,003065308 mm )2=0,004970798 mm
El valor obtenido cumple con el siguiente criterio f ≤ 0,00035 LT ≤ 0,154 mm.
Acople
f Ixy=( I XY
3 E ) [(L1 I3
I 1 I)+( L2 I
3−L1 I3
I2 I)+( L3 I
3−L2 I3
I3 I)+( L4 I
3−L3 I3
I 4 I)+( L5 I
3−L4 I3
I 5 I)]
f Ixy=( 1133.25 N
3×210000N
mm2 )[( (25 mm )3
π64
(80 mm )4 )+( (115 mm )3− (25 mm )3
π64
(88 mm )4 )+( (295 mm )3−(115mm )3
π64 ( 82 mm+95 mm
2 )4 )+( (345 mm )3−(295 mm )3
π64
(80 mm )4 )+( ( 415 mm )3−(345mm )3
π64
(78 mm )4 ) ]f Ixy=0,059236739 mm
f Jxy=( J XY
3 E ) [(L1J3
I 1 J)+( L2 J
3−L1 J3
I 2 J)]
f Jxy=( 68,30 N
3 ×210000N
mm2 )[( (25 mm )3
π64
(80 mm )4 )+( (95 mm )3−(25 mm )3
π64
(78 mm )4 )]

152
f Jxy=0,000051066 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xy=f Ixy+( f Jxy−f Ixy )L I
LT
f xy=0,059236739 mm+(0,000051066 mm−0,059236739 mm ) × 415mm440mm
=0,003413889 mm
f Ixz=( I XZ
3 E )[( L1 I3
I 1 I)+( L2 I
3−L1 I3
I 2 I)+(L3 I
3−L2 I3
I 3 I)+(L4 I
3−L3 I3
I 4 I)+( L5 I
3−L4 I3
I 5 I)]
f Ixz=( 794.66 N
3 × 210000N
mm2 )[( (25 mm )3
π64
(80 mm )4 )+( (115mm )3−(25 mm )3
π64
(88 mm )4 )+( (295 mm )3−(115 mm )3
π64 ( 82 mm+95 mm
2 )4 )+( (345mm )3−(295 mm )3
π64
( 80 mm )4 )+( (415 mm )3− (345 mm )3
π64
(78 mm )4 )]f IxZ=0,041538113mm

153
f JxZ=( J XZ
3 E )[( L1 J3
I 1 J)+( L2 J
3−L1J3
I 2 J)]
f JxZ=( 2595,87 N
3×210000N
mm2 )[( (25 mm )3
π64
(80 mm )4 )+( (95 mm )3−(25 mm )3
π64
(78 mm )4 )]f JxZ=0,001940895 mm
Según la ecuación 164 página 241 del Decker, la flexión bajo la fuerza F viene dada por:
f =f A+( f B−f A )LA
LT
En nuestro caso, tendremos lo siguiente:
f xz=f Ixz+ (f Jxz−f Ixz )LI
LT
f xz=0,041538113 mm+(0,001940895 mm−0,041538113mm )× 415 mm440 mm
=0,004190737 mm
f 2=√ f xy2+ f xz
2=√(0,003413889 mm )2+( 0,004190737 mm )2=0,005405267 mm

154
feje4 = f1 + f2 = 0,004970798 mm+0,005405267 mm=¿ 0,01037606mm


















