
Breve exposicion de Robotica
66
Grupo 1 y 2 ROBÓTICA INDUSTRIAL
-
Upload
edward-garzon -
Category
Documents
-
view
217 -
download
2
description
Exposicion de robotica
Transcript of Breve exposicion de Robotica

Grupo 1 y 2
ROBÓTICA INDUSTRIAL

ORIGEN DEL TERMINO ROBÓTICA
• 1920: se utiliza por primera vez el termino robot en una obra llamada “Los robots universales de Rossum” del dramaturgo Karel Capek.
• Robota ( palabra checa)= servidumbre o trabajo forzado. Despues el termino se tradujo al ingles como Robot.

Luego, Isaac Asimov comenzó en 1939 a contribuir con varias relaciones referidas a robots y a él se le atribuye el acuñamiento del término Robótica surgen las denominadas "Tres Leyes de Robótica" que son las siguientes:
1. Un robot no puede actuar contra un ser humano o, mediante la inacción, que un ser humano sufra daños.2. Un robot debe de obedecer las órdenes dadas por los seres humanos, salvo que estén en conflictos con la primera ley.3. Un robot debe proteger su propia existencia, a no ser que esté en conflicto con las dos primeras leyes.

• Según el diccionario Webster’s New World College un robot es:
«Cualquier antropomorfo mecánico construido para realizar rutinas de trabajo manual para los seres humanos».
• Según el Instituto de Robótica de América:
«Un robot es un manipulador re-programable multi-funcional diseñado para mover material, partes, herramientas, o dispositivos especializados, a través de movimientos variables programados para el desempeño de una variedad de tareas»
ALGUNAS DEFINICIONES DE ROBOT Y ROBÓTICA

• En 1986 P. McKerrow propuso la siguiente definición para Robot:
“ Un Robot es una máquina que puede ser programada que permite hacer una variedad de tareas, del mismo modo que un computador o un circuito electrónico puede ser programado para diferentes tareas.
• Para robótica propuso:
“Robótica es una disciplina que envuelve: Construcción de proyectos, control y programación de robots, uso de robots para resolver problemas, estudios de procesos de control, usando sensores y algoritmos y aplicaciones de procesos de control en robots.
ALGUNAS DEFINICIONES DE ROBOT Y ROBÓTICA

• ISO 8373 (1994) : Robot Industrial Manipulador: controlador automático, reprogramable multipropósitos en tres o más ejes , que puede moverse de algún lugar a otro para una aplicación industrial. El robot debe incluir un sistema de control.
ALGUNAS DEFINICIONES DE ROBOT Y ROBÓTICA

CLASIFICACIÓN GENERAL
Robots Play-Back• Regeneran una secuencia de
instrucciones grabadas.
Robots controlados por sensores• Toman decisiones basados en
datos obtenidos por sensores.
Robots controlados por visión• Manipulan un objeto al utilizar
información desde un sistema de visión

CLASIFICACIÓN GENERAL
Robots androides• Se parecen y actúan como si fueran
seres humanos. No existen en la realidad, sino que son elementos ficcionales.
Robots Adaptables• Los robots pueden automáticamente
reprogramar sus acciones sobre la base de los datos obtenidos por los sensores.
Robots con inteligencia artificial• Utilizan técnicas de inteligencia
artificial para tomar decisiones y resolver problemas.

Zoomórficos• Constituyen una clase
caracterizada principalmente por sus sistemas de locomoción que imitan a los diversos seres vivos.
Híbridos• Se sitúa en combinación con
alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición.
Teleoperadores• Estos robots son controlados de
manera remota por un operador humano. A estos robots se los utiliza en situaciones extremas.
SEGÚN SU ARQUITECTURA

Poliarticulados• En este grupo se encuentran
los robots sedentarios aunque pueden ser guiados para efectuar desplazamientos limitados y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo.
Robots móviles Son Robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de un sistema locomotor de tipo rodante.
SEGÚN SU ARQUITECTURA

Exoesqueletos Robóticos• es una máquina móvil consistente
primariamente en un armazón externo que lleva puesto una persona y un sistema de potencia de motores o hidráulicos que proporciona al menos parte de la energía para el movimiento de los miembros.
Robots Industriales• los robots de este tipo pueden ser
electrónicos o mecánicos y se los utiliza para la realización de los procesos de manipulación o fabricación automáticos.
SEGÚN SU APLICACIÓN
Robots Médicos• Prótesis para disminuidos físicos• Destinados a la realización de
intervenciones quirúrgicas.

HISTORIA DE LA ROBÓTICA
Los Árabes (siglo VII a XV) utilizaron estas
máquinas no solo como diversión, sino que les dieron una aplicación práctica, introduciéndolos en la vida cotidiana
dela realeza.
Hombre de Hierro de Alberto Magno (12041282).
La cabeza parlante de RogerBacon(1214-1294).
El gallo de Estrasburgo (1352).

HISTORIA DE LA ROBÓTICA
1495 Los diseños mecánicos de Leonardo DaVinci.(animales y soldados).

1738 Jacques de Vaucanson construye un autómata que podía interpretar canciones con una flauta.

1770 Pierre Jaquet-Droz construye muñecos que pueden escribir, dibujar e interpretar instrumentos musicales.

1940 IssacAsimov crea las leyes de la robótica.
1. Un robot no puede perjudicar aun ser humano.
2. Un robot ha de obedecer las ordenes recibidas de un ser humano.
3. Un robot debe proteger su propia existencia sin entrar en conflicto con la primera y segunda ley.

GENERACIONES
1. Robots manipuladores2. Robots con aprendizaje3. Robots con control sonorizado4. Robots inteligentes

1960 La empresa Unimate construye el robot PUMA (Programmable Universal Manipulator Arm).

1966 El Instituto de investigación de Stanford construye el robot móvil SRI Shakey

1969 Victor Scheinman construye el brazo Stanford. Este es la base de inspiración de los robots actuales.

1993 La Universidad Carnegie Mellon construye el robot Dante con 8 patas para explorar la Antártida.

1996 La empresa Honda da a conocer el robot humanoidP3.

1997Se construye el robot móvil Pathfinder para la exploración de la superficie de Marte.

1999 La empresa SONY construye el robot mascota AIBO.

2000 La empresa Honda da a conocer el robot humanoide ASIMO.

Dispositivos Manuales: Operados por personas.
Robots de Secuencias Fijas. Robots de Secuencias Variables: Robots donde un
operador puede cambiar la secuencia de forma relativamente sencilla.
Robots Ejecutadores (o de Playback): Robots
donde un operador humano guía al robot para que este desarrolle una tarea específica.
Robots Controlados Numéricamente: Son robots a
los cuales un operador les descarga un programa donde se encuentran los movimientos en vez de hacerlos él manualmente.
Robots Inteligentes: Perciben e integran a su
proceso las alteraciones del ambiente.
NIVEL DE INTELIGENCIA DEL CONTROLADOR DADO POR LA JIRSA

Inteligencia Artificial: Es la capacidad que tiene el robot de recibir instrucciones en lenguaje de alto nivel las cuales serán descompuestas por el sistema en funciones de bajo nivel.
Modo de Control: Los movimientos del sistema son modelados incluyendo las interacciones dinámicas entre los diferentes mecanismos. Tanto las trayectorias como los puntos de contacto con el elemento a trabajar (manipular) son planeados previamente. De este modo se formula una estrategia y los siguientes comandos de control son enviados al nivel inferior siguiente.
Servo-Sistemas: Los actuadores controlan los parámetros del dispositivo utilizando los datos adquiridos por los sensores en los lazos de control.
NIVEL DE CONTROL DE LOS PROGRAMAS EN EL CONTROLADOR

6.LENGUAJES DE PROGRAMACIÓN
¿Que es un Lenguaje de Programación?
Es un lenguaje formal diseñado para expresar procesos que pueden ser utilizados en el control
del comportamiento físico y lógico de una máquina.

CLASIFICACIÓN DE LENGUAJES DE PROGRAMACIÓN EN ROBÓTICA
La programación empleada en Robótica puede tener un carácter:
Explícito
Implícito

CLASIFICACIÓN DE LENGUAJES DE PROGRAMACIÓN EN ROBÓTICA
Explícita
La programación explicita es utilizada en aplicaciones industriales y consta de dos
técnicas fundamentales:
a) programación gestual; el brazo del robot es guiado directamente a lo largo de la trayectoria que debe seguir. Los puntos utilizados a lo largo
de la trayectoria son grabados en memorias, para que posteriormente puedan repetirse.
b) programación textual; las acciones que van a ser realizadas son especificadas mediante las
instrucciones de un lenguaje.

CLASIFICACIÓN DE LENGUAJES DE PROGRAMACIÓN EN ROBÓTICA
Implícita
Esta basada en la modelación del mundo exterior, cuando se describe la tarea a realizar
y el entorno las que van a ser desarrolladas, para que el sistema tome sus propias
decisiones.
Programación textual; a partir de la especificación de las tareas que van a ser
desarrolladas o de los objetivos que se pretendan obtener, el propio sistema de control
será el encargado de generar las órdenes concretas para su ejecución.

C
Robotc: Este es un entorno de programación basado en lenguaje C, es usado para el desarrollo
de la robótica educativa y en concursos.
Tomado de robotc.com

INFORM
Motosim: Este entorno de programación utiliza este lenguaje de programación creado en 1993, se encuentra orientado a objetos y dirigido por eventos, se compone de un compilador y una biblioteca desde donde el trabajo del programador define tan solo los objetos.
Tomado de kaizenautomation.com
Tomado de brandexdirectory.com

LD, FBD, ST, IL, SFC.
RSlogix5000 y TIA Portal: Estos entornos de programación generalmente se encuentran estandarizados bajo la norma IEC 61131-3el cual define los lenguajes de programación para todos los PLC que son usados en aplicaciones industriales.
Tomado de isa.org

BASIC ESTÁNDAR
El aspecto de un programa es un conjunto de instrucciones propias del sistema de Robot entre sentencias ya conocidas de BASIC. Se obtiene así una forma intuitiva de programación , sencilla incluso para aquellos usuarios con pocos conocimientos en BASIC.
Tomado de automa.cz

920: Karel Capek emplea por primera vez la palabra checa
“robota” (“trabajo tedioso” en español) para referirse a un
humanoide mecánico.
La palabra apareció en una obra de teatro en Londres, rápidamente el término se exportó a casi todos los idiomas del Mundo.
1938: Los americanos Willard Pollard y Harold Roselund
fabrican la primera maquina para pintar con spray.
La máquina fue fabricada para la empresa "DeVilbiss". A fecha de hoy aquella empresa sigue abierta.

1942: Isaac Asimov publica las tres leyes de la robótica. Leyes que marcan la supeditación de
los robots a la voluntad humana. Estas leyes se ponen de moda
especialmente a finales de siglo XX, al introducirse la robótica en los hogares y plantearse un problema ético y de seguridad
civil.
Primera ley: Un robot no puede hacerle daño a un ser humano, ni por omisión, permitir que un ser humano sufra daño. Segunda Ley: Un robot debe obedecer a un ser humano siempre que sus ordenes no contradigan la Primera Ley. Tercera Ley: Un robot debe proteger su propia existencia siempre y cuando dicha protección no interfiera con la Primera o Segunda Ley.

1951: Raymond Goertz diseña el primer brazo mecánico manejado a distancia para la Comisión de la Energía Atómica
La comision se fundo en 1946, al final de la Segunda Guerra Mundial. La supremacia de los tanques en este conflicto puso de manifiesto la necesidad de llevar la revolucion industrial del siglo XIX al Ejercito.
1954: George Devol diseña el primer robot programable comercial. Se comercializaría a partir de 1961.
Mas tarde el Sr. Devol fundaria "Unimation", la primera empresa de robótica de la historia.

1959: Se funda el Artificial Intelligence Laboratory en el MIT.
Fue la base de la robótica universitaria durante el siglo XX, solo comparable al Robotics Institute de la“Carnegie Melon University”.
1973: Aparece el primer robot controlado por un mini-ordenador, el robot es el “T3”.
Los "mini-ordenadores" de esta época pesaban habitualmente más 30 kilos.

•Peso: 2 toneladas.•Precisión: 1/10000 pulgadas•Accionamiento: Hidráulico•Controlador: Cinta Magnética
En 1961, es instalado en una fábrica de General Motors en Trenton New Jersey, determinando desde un comienzo el estrecho vínculo entre la robótica y la industria automotriz. Su función: manipular y almacenar piezas de metal fundido. Si bien tuvo un costo de fabricación de 65.000 USD sólo pudo ser vendido en 18.000 USD.

En 1962 se crea el primer robot cilíndrico (que usa coordenadas cilíndricas), el Versatran, de las palabras “versatile tansfer” (transferencia
versátil), los cuales son instalados por la American Machine and Foundry AMF, en una
planta de Ford en Canton EEUU.En 1969 nuevamente la General
Motors en conjunto con Unimation desarrollan e instalan los primeros robots soldadores
que aumentan significativamente la producción de la planta y
reemplazan a operarios en tareas que eran consideradas peligrosas
y dañinas para la salud.

Ese mismo año el Unimate entra al mercado japonés a través de un acuerdo con Kawasaki Heavy Industries, quienes acuerdan manufacturar y vender los robots para el mercado asiático. Se transforman en pioneros de la robótica en Japón desarrollando con éxito el Kawasaki-Unimate 2000.

Es en el año 1973 cuando otro actor relevante aparece en el mercado. KUKA deja de utilizar
robots Unimate para fabricar sus propios robots. El Famulus es el primer robot con 6 ejes
electromecánicamente conducidos.
El mismo año, Hitachi fabrica el primer robot que utiliza sensores
de visión dinámicos para manipular objetos en
movimiento, estos eran pernos en moldes en movimiento.

Un año más tarde, en 1974, el primer robot comercial controlado por un minicomputador aparece desarrollado por Richard Hohn de la
Cincinnati Milacron Corporation. El robot llamado T3 por The Tomorrow Tool marca un cambio significativo en la calidad y capacidad de control, vislumbrando el potencial del ese
entonces emergente desarrollo de computadores y microcontroladores.
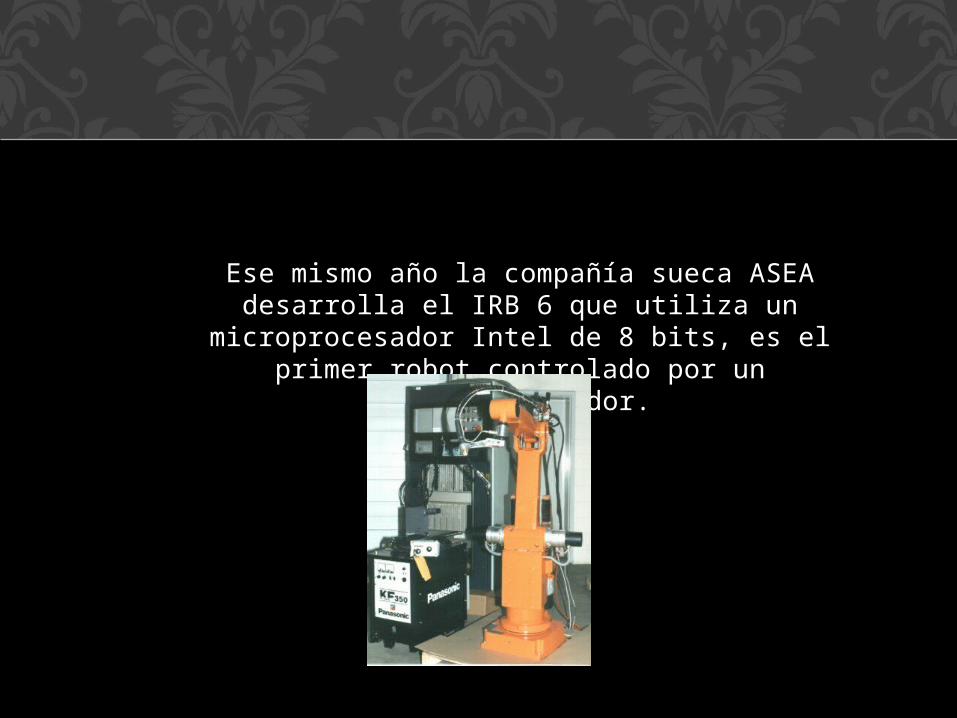
Ese mismo año la compañía sueca ASEA desarrolla el IRB 6 que utiliza un
microprocesador Intel de 8 bits, es el primer robot controlado por un microprocesador.

Posteriormente en 1978 se desarrolla la conocida gama de robots PUMA por Unimation/Vicarm. El desarrollo es una vez más apoyado
por General Motors, la idea era manejar pequeñas partes ocupando el mismo espacio que un operador humano.
Mientras que en Japón el robot SCARA de “Selectible Compliance Assembly Robot Arm” es desarrollado por Hiroshi Mikano en la
Universidad de Yamaneshi. Este tipo de configuración es ampliamente utilizado en aplicaciones del tipo “pick and place”, por su
configuración retráctil y veloz.

En 1981 Takeo Kanade de la Universidad Carnegie Mellon desarrolla el primer brazo robótico industrial directamente
conducido (direct drive arm). Esta innovación implica un cambio radical en la fabricación de robots industriales, dado
que se eliminan las transmisiones mecánicas y reductores que comúnmente se utilizaban. De ahora en adelante las partes del
robot estarán acopladas a rotor y estator de un servomotor, permitiendo una alta precisión y velocidad de movimientos.
En 1984 Adept presenta el primer robot SCARA de este tipo, el cual es rápidamente adoptado por la industria debido a la
simplicidad de su mecanismo.
Luego KUKA en 1985 presenta una nueva forma para los robots industriales en forma de Z, el tradicional cuerpo de
paralelogramo queda de lado, aumentando la flexibilidad de los movimientos y optimizando el espacio ocupado.

En la década del 90′ aparece una nueva configuración de robot, llamado Delta por Reymond Clavel del Federal Institute of
Techncology of Lausanne el cual permite un “pick and place” aún más rápido y preciso.
En 1992 Demaurex vende su primera aplicación de robots delta a Roland para la manipulación
de pretzels en 6 líneas.
Su consolidación llega en 1998 cuando ABB desarrolla el Flexpicker el robot delta más
rápido creado, capaz de manipular 120 objetos por minuto o tomar objetos de cintas
transportadoras a 10 m/s utilizando visión artificial.

¿QUE ES UN MANIPULADOR ROBÓTICO?
Un manipulador es un dispositivo que se utiliza bajo control humano para manipular los materiales sin contacto directo. Los materiales suelen ser radiactivos, de compromiso biológico o en lugares inaccesibles.

DEFINICIÓN TÉCNICA ASOCIACIÓN INDUSTRIAS DE ROBÓTICA
"Un robot industrial es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas"

ROBÓTICA INDUSTRIAL VS ROBÓTICA MÓVIL
ROBÓTICA INDUSTRIAL VS ROBÓTICA MÓVIL
Se trata fundamentalmente de dotar flexibilidad a los procesos productivos manteniendo al mismo tiempo la productividad que se consigue con una maquina automática especializada
se centra en el desarrollo de robots con capacidad de movimientos sin necesidad de la intervención humana. Es decir, se basa en hacer robots que son capaces de tomar sus propias decisiones para la realización de una o varias tareas.

ROBÓTICA INDUSTRIAL VS ROBÓTICA MÓVIL
CAMPOS DE DESARROLLO BASTANTE IMPORTANTES EN EL ÁREA DE LA TECNOLOGÍA E INVESTIGACIÓN
• Orientada a la manipulación de objetos.
• Tecnología Fija.• Dio principalmente el
origen a la robótica.
• Orientada a reconocimiento de espacios y trabajos en lugares peligrosos.
• Tecnología móvil ( transporte).
• Auge en la década de los 90’s

COMPOSICIÓN MECÁNICA DE UN MANIPULADOR
Estructura • Cuerpo• Brazo• Muñeca• Actuador Final
(aprehensor, garra, pinza o gripper)

ELEMENTOS DE UN ROBOT INDUSTRIAL

CONTROLADOR
• Regula cada uno de los movimientos del manipulador, las acciones, cálculos y procesado de la información
• Recibe y envía señales a otras máquinas-herramientas (por medio de señales de entrada/salida) y almacena programas.

DISPOSITIVOS DE ENTRADA Y SALIDA
Los más comunes son: teclado, monitor y caja de comandos (teach pendant).

TEACH PENDAT

DISPOSITIVOS ESPECIALES
Entre estos se encuentran los ejes que facilitan el movimiento transversal del manipulador y las estaciones de ensamblaje, que son utilizadas para sujetar las distintas piezas de trabajo. Ejemplo
A.Estación de posición sobre el transportador para la carga/descarga de piezas de trabajo.
B. Eje transversal para aumentar el volumen de trabajo del robot.
C. Estación de inspección por computadora integrada con el robot. D. Estación de ensamble.

AUTOMATIZACIÓN
Fija • El volumen
de producción es muy alto
• Alto costo de diseño de equipo
• Equipo especializado para procesar el producto, con alto rendimiento y tasas de producción elevadas
• Ciclo de vida depende de la vigencia del producto.
Pro
gra
mab
le • El volumen de producción es relativamente bajo
• Diversidad de productos a obtener
• El equipo de producción es diseñado para adaptarse a las variaciones de configuración del producto (software)
Fle
xib
le • Adecuada para un rango de producción medio
• Poseen características de automatización fija y programada
• Constituida por serie de estaciones de trabajo interconectadas entre sí por sistemas de almacenamiento y manipulación de materiales
Tota
l • Total de la producción
• Sin intervención humana

ROBOT
APLICACIONES DE LOS ROBOTS• Ambientes riesgosos. • Trabajo de repetición cíclica:
más consistencia y rapidez que un humano.
• Dificultad de manejo de herramientas por parte de los seres humanos: en el caso de herramientas pesadas o difíciles de manipular.
• Muti-operaciones: en estos casos, la máquina llega a sustituir varios trabajadores, no sólo uno.
• Posiciones y orientación establecidas: Tiene mayor grado de exactitud.

Los robots industriales pueden realizar manipulación de
materiales, aplicación de pegantes, procesos de
soldadura, corte, pintura, ensamble, fundición, inspección, control de
calidad, pulido de partes, alimentación de piezas a
una máquina, empaque de productos, entre otras.

IMPORTANCIA DE LOS ROBOTS
Actualmente los robots hacen parte de una gran parte en el campo de la producción. Se
utilizan debido a:
Reducción de la labor.
Incremento de utilización de las máquinas.
Flexibilidad productiva.
Mejoramiento de la calidad.
Disminución de pasos en el proceso de producción.

IMPORTANCIA DE LOS ROBOTS
Mejoramiento de las condiciones de trabajo,
reducción de riesgos personales.
Mayor productividad.
Ahorro de materia prima y energía.
Flexibilidad total.
Calidad de trabajo humano

BIBLIOGRAFÍA
1.Automatización en la manufactura. http://cursos.aiu.edu/Procesos%20y%20Tecnologia%20de%20Manufactura/PDF/Tema%205.pdf 2.Correa J, Vásquez R, Ramírez J, Taborda E. Manipuladores Robóticos, una mano para la industria. Metal Actual3. González J. Automatización de Procesos Industriales. Dto I.S.A, EUITI e ITT- UPV/EHU Vitoria-Gasteiz. Febrero 20044. Lung-Wen Tsai. Robot Analysis: The Mechanics of Serial an Paralell Manipulators. University of Maryland.


















