BIBLIOGRAPHIE Image Numérique - …bigbozoid.free.fr/CoursLICENCE3/IMS/COURS_IN/Cours...les pixels...
50
1 Image Numérique Carole Blanc 2 Image Numérique Image Numérique BIBLIOGRAPHIE •J.D. FOLEY, A. VAN DAM, S.K. FEINER, J.F. HUGHES & R.L. PHILIPS, Introduction à l'infographie, Addison Wesley, 1995, 2-87908-058-4 • J.D. FOLEY, A. VAN DAM, S.K. FEINER & J.F. HUGHES, Computer Graphics : Principles and practice, 2nd edition, Addison Wesley, 1996, 0-201-84840-6 • A. S. GLASSNER, Principles of digital image synthesis, Morgan Kaufman, 1994, 1-55860-276-3 3 Image Numérique Image Numérique Historique : la préhistoire –50's : 1 ères applications graphiques : visualisation de résultats numériques sous forme de courbes (surfaces) - pas de matériel spécialisé (télétypes, écrans) - pas d'interactivité 4 Image Numérique Image Numérique Historique : la préhistoire –50's : 1 ères applications graphiques :
Transcript of BIBLIOGRAPHIE Image Numérique - …bigbozoid.free.fr/CoursLICENCE3/IMS/COURS_IN/Cours...les pixels...

1
Image Numérique
Carole Blanc
22Image NumériqueImage Numérique
BIBLIOGRAPHIE
•J.D. FOLEY, A. VAN DAM, S.K. FEINER, J.F. HUGHES & R.L. PHILIPS, Introduction à l'infographie, Addison Wesley, 1995, 2-87908-058-4
• J.D. FOLEY, A. VAN DAM, S.K. FEINER & J.F. HUGHES, Computer Graphics : Principles and practice, 2nd edition, Addison Wesley, 1996, 0-201-84840-6
• A. S. GLASSNER, Principles of digital image synthesis, Morgan Kaufman, 1994, 1-55860-276-3
33Image NumériqueImage Numérique
Historique : la préhistoire
–50's : 1èresapplications graphiques : visualisation de résultats numériques sous forme de courbes (surfaces)
- pas de matériel spécialisé (télétypes, écrans)
- pas d'interactivité
44Image NumériqueImage Numérique
Historique : la préhistoire
–50's : 1èresapplications graphiques :

2
55Image NumériqueImage Numérique
Historique : la préhistoire
–55 : MIT : tube cathodique piloté par un ordinateur
1er écran graphique vectoriel (TX-0)a visualisation "fil de fer"
(wireframe) modèle pendant 15 ans
66Image NumériqueImage Numérique
Historique : la préhistoire
–55 : MIT : tube cathodique piloté par un ordinateur
77Image NumériqueImage Numérique
Historique : la préhistoire
–55 : armée EU - projet SAGE : localisation d'avions
88Image NumériqueImage Numérique
Historique : les pionniers
–63 : Ivan Sutherland (PhD MIT) a Sketchpad- système interactif (matériel, logiciel)- création, manipulation et animation de
figures

3
99Image NumériqueImage Numérique
Historique : les pionniers
– 60's : General Motors DAC-11er système de CAO (production de plans)Lockeed, Bell,
1010Image NumériqueImage Numérique
Historique : le matériel
–1ersécrans commercialisables65 : DEC 30, IBM 2250 (100 000 $), CDC
–1ersécrans permanents 68 : Computer Designs ART (15 000 $)70 : Tektronix 4010 (5 000 $)
tablette, joystick, boite à boutons
–70's : diminution du coût du hardwareécrans matriciels, couleurs
1111Image NumériqueImage Numérique
Historique : la révolution
–75's : apparition des micro-ordinateurs•- Apple, Atari, Amiga, IBM …
•- possibilités graphiques (Apple II : 512 x 192, 16)
• a développement de logiciels (jeux, tableurs, …)
–75's : recherche communication homme-machine (CHM)
�a utilisation du graphisme (menu - souris)Xerox : SmallTalk 80 Mac Intosh
1212Image NumériqueImage Numérique
Jeux :
71 : Pong NolanBushnell
77 : Space InvadersSociété Taïto
81 : pacman

4
1313Image NumériqueImage Numérique
Jeux :
71 : Pong NolanBushnell
81 : pacman
1414Image NumériqueImage Numérique
Historique : l'évolution
–80's : apparition des stations de travail•- Sun, Apollo, Silicon Graphics, ...
•- capacités graphiques (1024 x 1024, 16 M)
•- bibliothèques graphiques (Core, GL, …)
•- CHM : multifenêtrage, menus - souris
•- architectures/processeurs spécialisés
1515Image NumériqueImage Numérique
Historique : l'évolution
–90’s : l’explosion •- croissance conjointe
•- capacités matérielles
•- nouvelles utilisations
•- besoins utilisateurs
1616Image NumériqueImage Numérique
Secteurs d’activité
–architecture, urbanisme : conception, implantation
– industries de fabrication : conception, contrôle qualité
– transport (avion, train, voiture …) : apprentissage
– loisirs : jeux, cinéma, pub, télévision
–médecine : diagnostic, geste chirurgical, enseignement
–environnement : météo, ressources naturelles
–chimie : conception molécule
–militaire : détection satellitaire, apprentissage
– ...

5
1717Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?
1818Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?
Dynamique des fluides :contrôle de pression pour un turbo d’avion
Modèle cellulaire(géologie, géophysique)
1919Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?
2020Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?
011111100001000010000100001000010000100001000010000111111000
MémoireEcran

6
2121Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?
N
M
Une matrice de
N*M Pixels
(picture element)
2222Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?
Ecran Mémoire
1 bit / pixel
Bit-map
2323Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?Bit-map : quelques exemples
2424Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?Bit-map : quelques exemples

7
2525Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?
Mémoire
1 octet / pixel
256 niveaux de gris256 couleurs avec
LUT(Look Up Table)
8 - plans
2626Image NumériqueImage Numérique
Qu’est-ce qu’une image numérique ?
Mémoire
3 octets / pixel
16 Millions de Couleurs.
Vraies couleurs
24 - plans
…
2727Image NumériqueImage Numérique
Problématiques liées aux pixels :=((
• représentation des détails : anti-aliasing
2828Image NumériqueImage Numérique
Problématiques liées aux pixels :=((
• représentation des univers continus :�tracé de droites ou de courbes crénelage
� discrétisation des méthodes de traitement etd’analyse (mathématiques discrètes)

8
2929Image NumériqueImage Numérique
Autres problèmes :
• L’œil humain …• Exigence des utilisateurs …
3030Image NumériqueImage Numérique
Modèles numériques
Images numériques (pixmap)
Objets réels, virtuels
Modélisation
Traitement
SynthèseAnalyse
InterprétationNumérisation O
péra
teur
Ord
inat
eur
Imagescodées
Codage
Décodage
3131Image NumériqueImage Numérique
Modèles numériques
Images numériques (pixmap)
Objets réels, virtuels
Modélisation
Traitement
SynthèseAnalyse
InterprétationNumérisation O
péra
teur
Ord
inat
eur
Imagescodées
Codage
Décodage
3232Image NumériqueImage Numérique
La couleur
• Codage des couleurs :
� Monochrome (Noir et Blanc) ou bitmapPréparation des impressions.
� 8-plans : 256 niveaux de gris ou couleurs� LUT : Table de clés pour choisir 256 couleurs
parmi 16 Millions
• Quantification des couleurs : ou comment réduire intelligemment le nombre de couleurs dans un image.
• Modèles de couleurs : RGB, HSV,…

9
3333Image NumériqueImage Numérique
Quantification des couleurs : NG vs NB
Point de départ : une image en NG(256 possibles)
Point d’arrivée : une image NB
3434Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
Point de départ : une image en NG(256 possibles)
Point d’arrivée : une image NB
3535Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: représenter les NG par des motifs en noir et blanc
Clustering
Motif = matrice de pixels NB de petite taille.Plus il y a de pixels blancs plus les niveaux de gris représentés sont clairs. Et vice et versa.
Question : Dans quel ordre doit-on allumer les pixels pour former les différents motifs ?
3636Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2

10
3737Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2
3838Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2
3939Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2
4040Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2

11
4141Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère ideé: Clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2
4242Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2
4343Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2
4444Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2

12
4545Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
Simulation du procédé offset de l’imprimerie : les motifs représentent des taches d’encre de plus en plus grosses en quinconces.
N
n=N/2n = 3 donne 19 motifs
Dans le cas général :
12
2
+Nmotifs
4646Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: Clustering
Simulation du procédé offset de l’imprimerie : l’algorithme
�Définir les différents motifs
�Partager l’image à traiter en morceaux de taille N*N pixels
�Calculer pour chaque morceaux le NG moyen.
�Choisir le motif correspondant à ce NG.
�Remplacer le morceau de l’image par le motif.
4747Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: Clustering
Simulation du procédé offset de l’imprimerie : exemple
4848Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: représenter les NG par des motifs en noir et blanc
Simulation du procédé offset de l’imprimerie :
Avantage : les pixels noirs sont connexes donc l’image est adaptée à l’impression.
Inconvénient :Peu de motifs réalisables par rapport à la taille de la matrice

13
4949Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
On oublie la contrainte de l’offset. On allume les pixels un par un pour définir les motifs.Une matrice carrée de taille N donne N*N+1 motifs possibles définis avec la matrice de Dither (tremblé ordonné) :
=
=
++++
=
11
11
13
20
1434
2404
2
2
L
MOM
L
n
nnnn
nnnnn
UD
UDUD
UDUDD
5050Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
On oublie la contrainte de l’offset. On allume les pixels un par un pour définir les motifs.Une matrice carrée de taille N donne N*N+1 motifs possibles définis avec la matrice de Dither (tremblé ordonné) :
=
513715
91113
614412
10280
4D
5151Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
1ère idée: clustering
On oublie la contrainte de l’offset. On allume les pixels un par un pour définir les motifs.Une matrice carrée de taille N donne N*N+1 motifs possibles définis avec la matrice de Dither (tremblé ordonné) :
5252Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
2ème idée: dithering
Algorithme : Pour un morceau de n*n pixels de l’image, on change le NG de chaque pixel en ajoutant un pseudo-bruitcalculé avec la matrice de Dither.On seuille chaque NG modifié à 0.5
5.02
2/1),(
),(
−+n
jiDjiNG n

14
5353Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
2ème idée: dithering
5454Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
Inconvénients :Clustering et Dithering génèrent des motifs réguliers
Autre idée : …
5555Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
Diffusion de l’erreur : Floyd et Steinberg
Algorithme : �Balayage de l’image pixel par pixel
�Pourchaque pixel :Si NG < 0.5
alors noir (0)sinon blanc (1)
�Evaluation de l’erreur commise lors du seuillage.�Répartition de cette erreur sur les pixels voisins
non encore traités
5656Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
Diffusion de l’erreur : Floyd et Steinberg
Algorithme : �Balayage de l’image pixel par pixel
ligne par ligne de gauche à droite et de haut en bas.
ligne par ligne de gauche à droite puis de droite à gauche et de haut en bas (zigzag).
Hilbert, …

15
5757Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
Diffusion de l’erreur : Floyd et Steinberg
Algorithme : �Répartition de cette erreur sur les pixels voisins
non encore traités
3/165/163/16
5/16
5858Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
Diffusion de l’erreur : Floyd et Steinberg
Algorithme : �Répartition de cette erreur sur les pixels voisins
non encore traités
1/165/163/16
7/16
5959Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
Diffusion de l’erreur : Floyd et SteinbergExemple :
6060Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB

16
6161Image NumériqueImage Numérique
Quantification des couleurs :NG vs NB
Diffusion de l’erreur : Floyd et Steinberg
Inconvénient : On ne peut pas traiter une partie de l’image
Idée : avoir des méthodes locales …
6262Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans
Hypothèse : on travaille avec la repésentation RGB des couleurs
• R = red (rouge) sur un octet.• G = green (vert) sur un octet.• B = blue (bleu) sur un octet.
La couleur de chaque pixel est représentée par 3 octets : image en 24 plans.
6363Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans
Axe de gris
(0 ,0 ,0)Rouge(255,0,0)
Bleu(0,0,255)
Vert(0,255,0)
Jaune(255,255,0)
Cyan(0,255,255)
Magenta(255,0,255)
Blanc(255,255,255)
Noir
6464Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans
1ère idée : seuillage brut
• Pour chaque composante (RGB) d’une couleur faire un seuillage à 6 niveaux :
0 255
51
204
153
102
255
reste 216 couleurs différentes au final

17
6565Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans
2ème idée : seuillage amélioré
• Même principe en tenant compte des caractéristiques de l’œil humain : seuillage à 8 niveaux pour le rouge et le vert, à 4 niveaux pour le bleu: 256 couleurs au final
0 255
170
85
255
0 255
36
182
109
73
255
146
219
6666Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans
3ème idée: tenir compte des caractéristiques de l’image
• seuillage à 32 niveaux par couleur R G B reste 32768 couleurs possibles (R’,G’,B’)
• établir l’histogramme des 32768 couleurs possibles
n
H ''*32'*1024 BGRn ++=H[n] = H[n] + 1
�Pour chaque pixel de l’image
�Choisir les 256 couleurs Finales. Comment ?
6767Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans
3ème idée: tenir compte des caractéristiques de l’image
Choix des 256 couleurs sur l’histogramme :
• Popularité: 256 plus fréquentes
• Diversité:
1. la plus populaire
2. la plus distante de 1
3. la plus distante de 2
…
256. La plus distante de 255
6868Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans
3ème idée: tenir compte des caractéristiques de l’image
Choix des 256 couleurs sur l’histogramme :
• Bradley :
1. la plus populaire
2. la plus distante de 1
3. retour à 1

18
6969Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans4ème idée: Median Cut ( Heckbert 82)
• seuillage à 32 niveaux + histogramme
• partage du cube RGB en deux selon l’axe des rouge en 2 régions contenant le même nombre de pixels. Pareil selon l’axe des verts et bleus. On a 8 « sous-cubes » contenant chacun le mêmenombre de pixels.
• On répète cette subdivision jusqu’à avoir 256 sous-cubes.
• Pour chaque sous-cube on fait la moyenne des couleurs présentent et on donne cette couleur à tous les pixels du sous-cube.
7070Image NumériqueImage Numérique
Quantification des couleurs : 8 vs 24 plans
14984couleurs
65 couleurs
252couleurs
7171Image NumériqueImage Numérique
Quantification des couleurs : RGB vs NGris
NGris = 0.2999*R +0.587*G + 0.114*B
•Les coefficients sont issus de la sensibilité de l’œil humain
•Les niveaux de gris (NGris) sont invariants par cette transformation.Exemple :
Si R = G = B = x dans [0, 255]alors
NGris = (0.2999 + 0.587 + 0.114)x = x
7272Image NumériqueImage Numérique
Modèles de couleur :
• domaine complexe : –physique, physiologie, psychologie, culture, etc.
• couleur d'un objet dépend
– de l'objet (couleur, matière, réflexion/diffusion)– de la source qui l'éclaire
– de la couleur ambiante
– du système de perception humain

19
7373Image NumériqueImage Numérique
Modèles de couleur :
•Perception visuelle humaine :– vue et/ou perception : œil et/ou cerveau
– œil : nombre fini de récepteurs réagissant aux longueurs d'onde entre 380 et 770 nm
– perception
� dépend de la longueur d'onde (rouge, vert, bleu)
� plus sensible aux contrastes qu'aux différences absolues.
� dépend de la luminosité
� dépend du sujet (culture, âge, condition)
7474Image NumériqueImage Numérique
Modèles de couleur
Notions fondamentales–Physique:intensité, luminance, longueur d’ondes,…
–Psychologie de la perception : luminosité
–Chromatique :•teinte (hue) : (rouge, bleu …)
•saturation: mesure la différence entre une couleur et un NGris de même intensité
•clarté(lightness) : intensité lumineuse réfléchie
•luminosité(brightness) : intensité lumineuse émise
7575Image NumériqueImage Numérique
Modèles de couleur
• Quelques traductions : – colorimétrie :
•teinte : longueur d'onde dominante•saturation : pureté de la couleur•clarté ou luminosité : luminance
–lumière : énergie électromagnétique dont le spectre est compris entre 400 et 700 nm (violet -> rouge)
7676Image NumériqueImage Numérique
Modèles de couleur
• Cadre de travail:la rétine possède 3 sortes de cellules détectrices de couleurs :
•une pour le rouge (570 nm), appelés erythrolabes•une pour le vert (535 nm), appelés chlorolabes•une pour le bleu (445 nm), appelés cyanolabes
Que nous indique les courbes ci-dessus ?

20
7777Image NumériqueImage Numérique
Modèles de couleur
• Standardisation:La perception des couleurs diffère selon :
� Les individus
�Les périphériques d’affichage
En 1931 La Commission Internationale de l'Eclairage (CIE) propose une représentation standard indépendante des périphériques utilisés. Les critères sont basés sur la perception de la couleur par l'oeil humain
7878Image NumériqueImage Numérique
Modèles de couleur
•Standardisation:le système colorimétrique xyY représentant les couleurs selon leur chromaticité (axes x et y) et leur luminance (axe Y).
7979Image NumériqueImage Numérique
Modèles de couleur
•Standardisation:le système colorimétrique xyY représentant les couleurs selon leur chromaticité (axes x et y) et leur luminance (axe Y).
Spectres A : couleurs visiblesB : film couleurC : moniteurD : imprimante
8080Image NumériqueImage Numérique
Modèles de couleur
•RGB:
(0 ,0 ,0)Rouge(255,0,0)
Bleu(0,0,255)
Vert(0,255,0)
Jaune(255,255,0)
Cyan(0,255,255)
Magenta(255,0,255)
Blanc(255,255,255)
Noir

21
8181Image NumériqueImage Numérique
Modèles de couleur
•RGB: – modèle additif
– mélange d’ondes lumineuse
– adapté aux affichagesgraphiques
– certaines couleurs ne sont représentables.
8282Image NumériqueImage Numérique
Modèles de couleur
•CMY: Cyan - Magenta - Yellow
Rouge
Bleu
VertJaune
Cyan
Magenta Blanc(0,0,0)
Noir
8383Image NumériqueImage Numérique
Modèles de couleur
•CMY: – modèles soustractif
– mélange de pigments
– utilisé en imprimerie(CMYK).
Pourquoi K ?
– certaines couleurs ne sont pas représentables.
8484Image NumériqueImage Numérique
Modèles de couleur Modèles de couleur
Munsell, peintre américain (1858 - 1918), publie en 1915 son " atlas of the Munsell color system ".
Il présentait les couleurs sous forme d'un" arbre des couleurs" autour d'un axe vertical allant du blanc au noir

22
8585Image NumériqueImage Numérique
Modèles de couleur • HSL :Après la mort de Munsel, la Munsell color Cy continue ses travaux et publie, en 1929, le " Munsell book of colors " classification en 3 dimensions :
�teinte, Saturation
�Luminosité : R+V+BCette classification est, encore actuellement, très utilisée, enparticulier en géologie et en archéologie.
8686Image NumériqueImage Numérique
Modèles de couleur
• HSL :
8787Image NumériqueImage Numérique
•HSV: – Hue
–Saturation
–Value max(R, V, B)
S
V
H
Modèles de couleur
8888Image NumériqueImage Numérique
• YUV, YIQ :TV : YUV (PAL), YIQ (NTSC)
3 primaires : luminance et 2 chrominance
Modèles de couleur
23
8989Image NumériqueImage Numérique
Traitement d’image
9090Image NumériqueImage Numérique
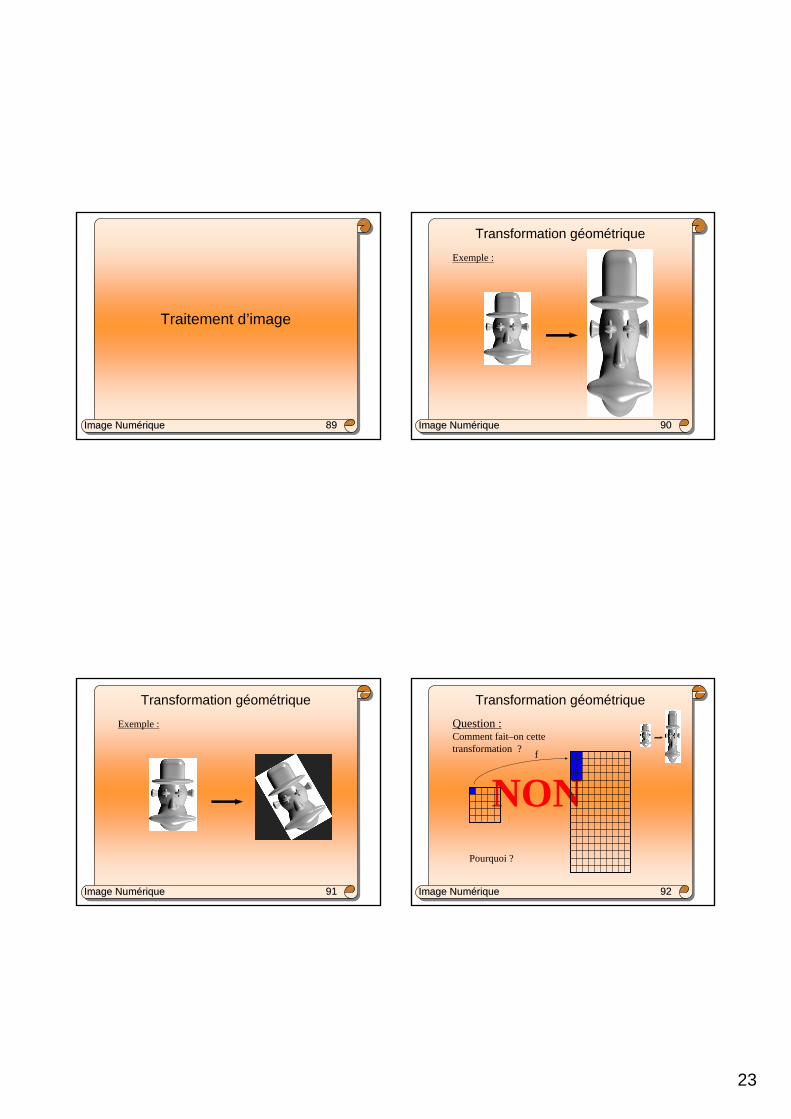
Transformation géométrique
Exemple :
9191Image NumériqueImage Numérique
Transformation géométrique
Exemple :
9292Image NumériqueImage Numérique
Transformation géométrique
Question :Comment fait–on cette transformation ?
NONf
Pourquoi ?

24
9393Image NumériqueImage Numérique
Transformation géométrique
f -1
Pour chaque pixel dans l’image finale on cherche quel est le pixel de l’image initiale qui lui correspond. Il faut définir f -1
9494Image NumériqueImage Numérique
Transformation géométrique
Même principe pour une rotation
f -1
f -1 est la rotation inverse
Image finale Image originale
9595Image NumériqueImage Numérique
Transformation géométrique
Transformation optique 1 pour 1 :
La couleur de chaque pixel de l’image est recalculée en fonction de sa valeur d’origine
Exemple : en niveaux de gris
0 255
255
NG
Inversion vidéo
9696Image NumériqueImage Numérique
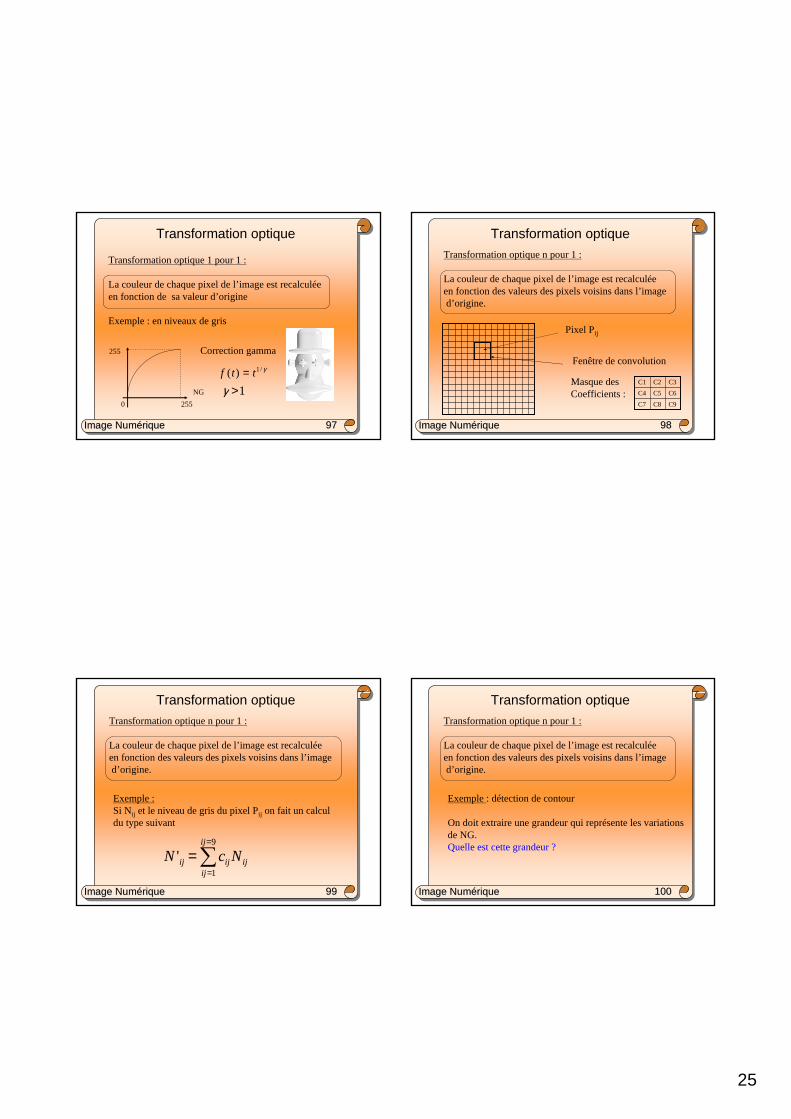
Transformation optique
Transformation optique 1 pour 1 :
La couleur de chaque pixel de l’image est recalculée en fonction de sa valeur d’origine
Exemple : en niveaux de gris
0 255
255
NG
Eclaircissement
25
9797Image NumériqueImage Numérique
Transformation optique
Transformation optique 1 pour 1 :
La couleur de chaque pixel de l’image est recalculée en fonction de sa valeur d’origine
Exemple : en niveaux de gris
0 255
255
NG
Correction gamma
γ/1)( ttf =1>γ
9898Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
La couleur de chaque pixel de l’image est recalculée en fonction des valeurs des pixels voisins dans l’image d’origine.
Pixel Pij
Fenêtre de convolution
C9C8C7
C6C5C4
C3C2C1Masque des Coefficients :
9999Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
La couleur de chaque pixel de l’image est recalculée en fonction des valeurs des pixels voisins dans l’image d’origine.
Exemple :Si Nij et le niveau de gris du pixel Pij on fait un calcul du type suivant
ij
ij
ijijij NcN ∑
=
=
=9
1
'
100100Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
La couleur de chaque pixel de l’image est recalculée en fonction des valeurs des pixels voisins dans l’image d’origine.
Exemple : détection de contour
On doit extraire une grandeur qui représente les variations de NG.Quelle est cette grandeur ?

26
101101Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
Exemple : détection de contour
h
xfhxfxf
)()()('
−+≈
Dans un espace discret on fera :
),()1,(
),(),1(
yxNGyxNGV
yxNGyxNGV
y
x
−+=−+=
102102Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
Exemple : détection de contour
Masque de Sobel
10-1
10-1
10-1
111
000
-1-1-1
Vx Vy
103103Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
Exemple : détection de contour
Masque de Prewitt
10-1
20-2
10-1
121
000
-1-2-1
Vx Vy
104104Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
Exemple : détection de contour

27
105105Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
Exemple : Filtre passe-bas (blur)
1/91/91/9
1/91/91/9
1/91/91/9
106106Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour 1 :
Exemple : filtre passe-bas (blur)
107107Image NumériqueImage Numérique
Transformation optique
Transformation optique n pour n :
Principe ?
108108Image NumériqueImage Numérique
Synthèse 2D

28
109109Image NumériqueImage Numérique
Synthèse 2D• Tracé :
• Découpage :
• Remplissage :
110110Image NumériqueImage Numérique
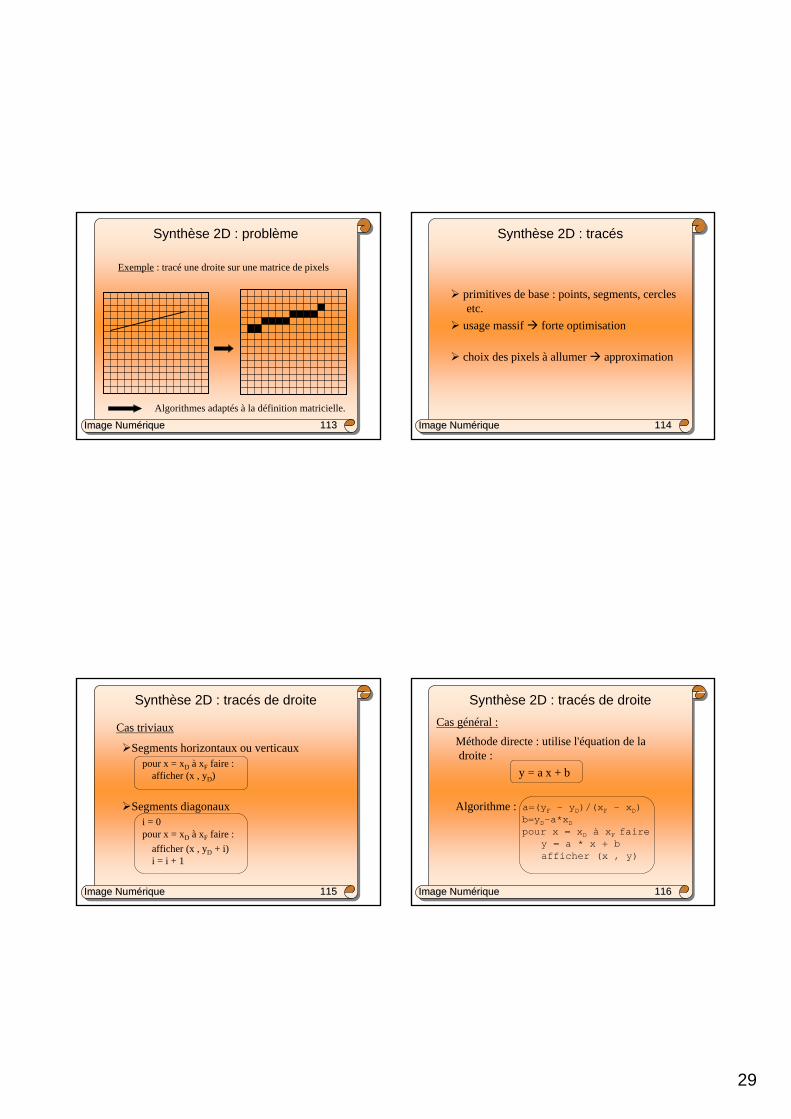
Synthèse 2D : problème
111111Image NumériqueImage Numérique
Synthèse 2D : problème
Exemple: tracé une droite en vectoriel
%!PS-Adobe-2.0 EPSF-2.0%%BoundingBox: 0 0 400 400
%% Version encapsulee (PostScript 2)
newpath0 0 moveto400 200 lineto
strokeshowpage
112112Image NumériqueImage Numérique
Synthèse 2D : problème
Exemple: tracé une droite sur une matrice de pixels
29
113113Image NumériqueImage Numérique
Synthèse 2D : problème
Exemple: tracé une droite sur une matrice de pixels
Algorithmes adaptés à la définition matricielle.
114114Image NumériqueImage Numérique
Synthèse 2D : tracés
� primitives de base : points, segments, cercles etc.
� usage massif � forte optimisation
� choix des pixels à allumer � approximation
115115Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
Cas triviaux
�Segments horizontaux ou verticauxpour x = xD à xF faire :
afficher (x , yD)
�Segments diagonauxi = 0pour x = xD à xF faire :
afficher (x , yD + i)i = i + 1
116116Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
Cas général :
Méthode directe : utilise l'équation de la droite :
y = a x + b
Algorithme : a=(y F - y D)/(x F - x D)b=y D-a*x D
pour x = x D à x F fairey = a * x + bafficher (x , y)

30
117117Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
Cas général :
•Inconvénients méthode directe :
– opération couteuses (*, /)
– arrondis
– trous : si |a| > 1
• Exemple :D (1 , 1) F (3 , 6)
a = ( 6 - 1) / (3 - 1) = 5/2
b = 1 - 5/2 * 1 = - 3/2
( x1 , y1 )= (1,1) ( x2 , y2 )= (2, 7/2)
( x3 ,y3 ) = (3, 6)
118118Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
Cas général :
Améliorations
� si |a| > 1 on parcourir les y et calculer les x
� remplacer les * et / par des + et –� calculs incrémentaux
119119Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
Méthode incrémentale : Principe
Calculer l’étape i en fonction de l'étape i-1autrement dit calculer Pi+1 en fonction de Pi
Exemple: dans le 1er octantx i+1 = x i + 1y i+1 = a x i+1 + b
= a (x i + 1) + b = y i + a
généralisable à tous les octants par symétrie
123
4
56 7
8
120120Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
Méthode incrémentale : 1èreversion
a = (yF-yD)/(xF-xD)y = yDpour x = xD à xF faire :
afficher (x,y)y = y+a
Inconvénients : additions de réels, arrondis

31
121121Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
Méthode incrémentale : 2èmeversion Bresenham(65)
Principe : minimiser la distance entre le segment réel et le segment tracé
Exemple: 1er octant
si |a| < 1/2 alors choisir
Pi+1 (xi + 1, yi)
si |a| > 1/2 alors choisir
Pi+1 (xi + 1, yi + 1)
en pratique, on testera le signe d'une erreur (a-1/2)
Pi Pi+1 ?
Pi+1 ? a=1/2
122122Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
•Algorithme de Bresenham: versionβ octant 1
e = -1/2a = (y F - y D) / (x F - x D)y = y D
pour x = x D à x Ffaire
si e > 0 alors
y = y + 1e = e - 1 + a
sinon
e = e + aafficher (x , y)
123123Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
•Algorithme de Bresenham: versionβ octant 1
•Exemple :• D (1 , 1) F (4 , 3)
• a = 2/3
• e = -1/2
• y = 1
•Problème : division pour calculer « a » + opérations réelles sur l'erreur
•Idée : comme on ne teste que le signe de « e »multiplier « e » par une constante positive 2 * (xD - xF)
3
4
1/6
4
221yi
321xi
3/6-1/61/6e
321i
124124Image NumériqueImage Numérique
Synthèse 2D : tracés de droite
•Algorithme de Bresenham: 1er octant
Dx = xF - xDDy = yF - yDe = - Dxy = yDpour x = xD à xF faire :
si e > 0 alors
y = y+1e = e+2*(Dy-Dx)
sinon
e = e+2*Dyafficher (x , y)
Rq : Coût optimisé

32
125125Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
• Objectifvérifier qu'un affichage reste à l'intérieur de l'écran
• Motivationséconomiser des opérations inutiles
• Extensionen 3D : éliminer les calculs en dehors de l'espace visible
126126Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
•Méthodes :–Points : on teste point par point l'appartenance à l'écran
–Segments : il existe 4 familles de droite
1: segment visible
1 2 : segment invisible23 : segmentpartiellement visible
3 4 : segmentpartiellement visible
4
Idée : tester les extrémités du segment
127127Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
•Méthode: Cohen-SutherlandBasée sur une décomposition du plan en 9 régions repérée par un code binaire.
•la première valeur = 1 si x < xmin,
•la deuxième valeur = 1 si x > xmax,
•la troisième valeur = 1 si y < ymin,
•la quatrième valeur = 1 si y > ymax.
128128Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
•Méthode: Cohen-Sutherland
Simple pour 3 cas :
C(D) = C(F)= 0000[DF] est visible cas 1
C(D) ou C(F) est 0000[DF] en partie visible cas 2
C(D)&&C(F) ≠ 0000[DF] est invisible cas 3

33
129129Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
•Méthode: Cohen-Sutherland
Dernier cas : incertain.
• On calcule l’intersection Idu segment [DF] avec une droite qui formentla fenêtre de clipping.
• On traite le segment [DI]ou [IF] obtenu
I
130130Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
Cas des polygones:
• si l'on veut simplement afficher le contour, un découpage coté par coté suffit.
• si l'on veut ensuite traiter le polygone (le remplir), il faut s'assurer de conserver la connexité
131131Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
Cas des polygones: Sutherland - Hodgman
Idée : découpe du polygone par chacun des cotés de la fenêtre.Mise en œuvre : parcours de la liste des cotés,construction d'une liste intermédiaire.
4 cas possibles :
Si
Sj
(1)
Si
Sj
Sk
(2)
Si
Sj
(3)
Sj
Si
Sk
(4)
132132Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
Cas des polygones: Sutherland – HodgmanAlgorithme : L = liste ordonnée des sommets du polygonepour chaque coté de la fenêtre faire :
NL = {}pour chaque sommet Si de L faire :
si (2) alors NL = NL U {Sk , Sj}si (3) alors NL = NL U {Sj}si (4) alors NL = NL U {Sk}
L = NL
Si
Sj
(1)
Si
Sj
Sk
(2)
Si
Sj
(3)
Sj
Si
Sk
(4)

34
133133Image NumériqueImage Numérique
Synthèse 2D : Découpage (clipping)
Cas des polygones: Sutherland – Hodgman
Exemple
S1
S2
S3
S4
S5
134134Image NumériqueImage Numérique
Synthèse 2D : Remplissage
Introduction• 1èresimages : silhouettes en fil de fer (technologie vectorielle) � pas de remplissage
• évolution technologie : matriciel � évolution algorithmique
� images "remplies"
• 2 familles d'algorithmes�contours affichés sur l'écran
�contours représentés en mémoire(liste de sommets, courbe paramétrique, etc)
135135Image NumériqueImage Numérique
Synthèse 2D : Remplissage
Contours affichés
� Point à point1. parcours de la fenêtre ligne par ligne de haut en
bas (scan-line).
2. test de l'appartenance d'un point à la surface.
3. si on détecte un point allumé alors tous ses voisins (dans le sens du balayage) sont à allumer jusqu'au prochain point déjà allumé
136136Image NumériqueImage Numérique
Synthèse 2D : Remplissage

35
137137Image NumériqueImage Numérique
Synthèse 2D : Remplissage
Contours affichés
•Améliorations :� traçage de segments plutôt que de listes de points
� rectangle englobant pour minimiser le parcours
� détection des concavités, triangulation
138138Image NumériqueImage Numérique
Synthèse 2D : Remplissage
Contours affichés:
� Inondation
• on part d'un point interne au polygone (germe)
• on essaie de colorer ses voisins
• on itère le procédé (récursion)
139139Image NumériqueImage Numérique
Synthèse 2D : Remplissage
Contours affichés:
� Inondation variante :1. tracer des segments dans les 4 directions
2. empiler les voisins non traités
3. si frontière alors redémarrer d'un point dépilé
140140Image NumériqueImage Numérique
Synthèse 2D : Remplissage
Contours affichés:
� Attention à la connexité du contour :Contour 8-connexe � remplissage 4-connexe
Contour 4-connexe � remplissage 8-connexe
Sinon trou ou fuite.
Contour et remplissage4-connexe : trou
Contour et remplissage 8-connexe : fuite
36
141141Image NumériqueImage Numérique
Synthèse 2D : Remplissage
Contours stockés: Principe
– calculer et stocker les extrémités des segments
– principe : remplir par une série de segments horizontaux
142142
143143Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
DéfinitionsDéfinitions
Modélisation géométrique:
Création d'une description numérique des caractéristiques géométriques d'un objet 3D sous la forme d'un fichier informatique.
Modeleur :Logiciel permettant de réaliser la modélisation géométrique et optique d'une scène ou d'un objet 3D.
Exemple: Maya, SoftImage, Rhyno, etc
144144Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
HistoriqueHistorique
Années 60 :Premiers travaux issus du monde industriel
Débuts simultanés dans quatre entreprises :
• Constructeur Boeing (USA) John Ferguson
• Constructeur Ford (USA) Steven Coons
• Constructeur Citroën (France)Paul de Casteljau
• Constructeur Renault (France) Pierre Bézier
1974 :Première conférence universitaire
• University of Utah R. Barnilh & R. Riesenfeld

37
145145Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
HistoriqueHistorique
Premiers travaux :
• Formes simples
• Visualisation en fil de fer
146146Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
HistoriqueHistorique
Aujourd'hui :
• Formes complexes
• Visualisation réaliste
© Pixar 1998
147147Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Domaines d'applicationDomaines d'application
Architecture Cinéma Mécanique
Médecine Jeux vidéo Sculpture virtuelle
Urbanisme ...
148148Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Domaines d'applicationDomaines d'application
• Architecture
• Mécanique
• Médecine
• Urbanisme
• Cinéma
• Jeux vidéo
• Sculpture virtuelle
avec sans
Contraintes physiques

38
149149Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
ClassificationClassification
Il existe 4 familles de modèles :
• Volumique continu
• Volumique discret
• Surfacique continu
• Surfacique discret
150150Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique continuVolumique continu
On définit un volume V avec une fonction F dite d'intérieur/extérieur :
( ) ( ){ }0,,/R,, 3 ≤∈= zyxFzyxPV
On dit que V est défini de manière implicite, pourquoi ?
151151Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique continu : ExemplesVolumique continu : Exemples
Sphère :rayon r centre (a,b,c)
Ellipsoïde :rayons (p,q,r) centre (a,b,c)
( ) ( ) ( ) ( ) 2222,, rczbyaxzyxF −−+−+−=
( ) ( ) ( ) ( )2
2
2
2
2
2
,,r
cz
q
by
p
axzyxF
−+−+−=
152152Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique continu : ExemplesVolumique continu : Exemples
Equipotentielles :
• Sources de potentiel :
• Seuil : T
• Loi de décroissance :
( )iiii zyxP ,,
( )zyxf i ,,
( ) ( ) TzzyyxxfzyxFN
iiiii −−−−=∑
=1
,,,,

39
153153Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique continu : ExemplesVolumique continu : Exemples
Equipotentielles :
• Sources de potentiel :
• Seuil : T
• Loi de décroissance :
( )iiii zyxP ,,
( )zyxf i ,,
154154Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique continu : ExemplesVolumique continu : Exemples
Equipotentielles :
155155Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique continuVolumique continu
Inconvénients:
• Pas de calcul simple d'un point sur la surface.Conséquences ?
• Pas de paramétrisation.Conséquences ?
Avantages :
• Stockage compact.• Bonne gestion des contacts entre volumes.• Bonne adaptation aux opérations booléennes.
156156Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique discretVolumique discret
On échantillonne un volume V en une liste de N volumes
élémentaires: vi
vi : Souvent parallelépipédiques et alignés le long des axes.
UN
iiv
1=
=V
Quel nom portent ces volumes élémentaires ?
40
157157Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique discretVolumique discret
Décomposition uniforme
Volumes de taille fixe
Grille 3D qui s'appuie sur le volume englobant de l'objet
158158Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
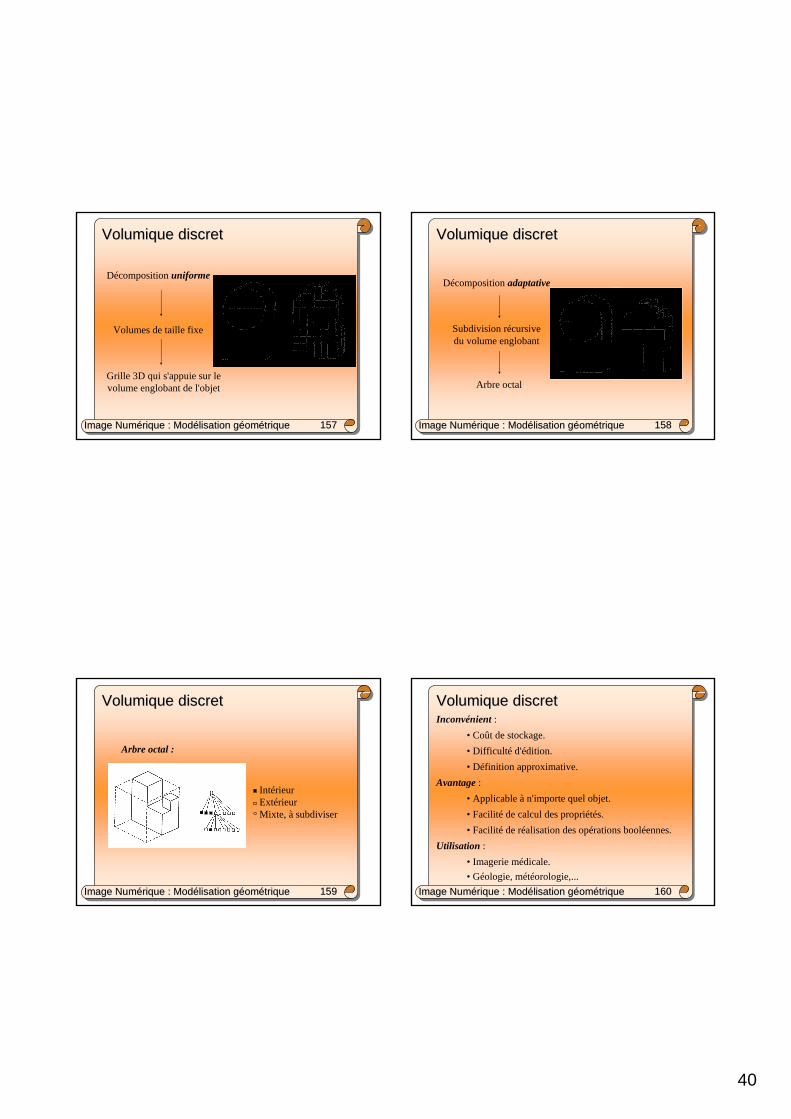
Volumique discretVolumique discret
Décomposition adaptative
Subdivision récursivedu volume englobant
Arbre octal
159159Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique discretVolumique discret
Arbre octal :
IntérieurExtérieurMixte, à subdiviser
160160Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Volumique discretVolumique discretInconvénient:
• Coût de stockage.
• Difficulté d'édition.
• Définition approximative.
Avantage:
• Applicable à n'importe quel objet.
• Facilité de calcul des propriétés.
• Facilité de réalisation des opérations booléennes.
Utilisation :
• Imagerie médicale.
• Géologie, météorologie,...

41
161161Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continuSurfacique continu
On définit une surface S avec une équation explicite S(u,v)dépendant de 2 paramètres compris dans [0,1]
( ) ( ) [ ] ( ) ( ){ }zyxvuSvuRzyxP ,,,,1,0,/,, 23 =∈∃∈=S
On dit que S est définie de manière explicite, pourquoi ?
162162Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
Sphère :rayon r centre (a,b,c)
Ellipsoïde :rayons (p,q,r) centre (a,b,c)
( )( ) ( )( ) ( )( )
+++
=vrc
uvrb
uvra
vuS
πππππ
cos
2sinsin
2cossin
,
( )( ) ( )( ) ( )( )
+++
=vrc
uvqb
uvpa
vuS
πππππ
cos
2sinsin
2cossin
,
163163Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
Courbes B-spline:
• Points de contrôle : Pk
• Fonctions de base de degré p-1 : )(, tN pk
( ) ( ) k
n
kpk PtNtC ∑
=
=0
,
164164Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
Courbes B-spline :
P0
P6
P4
P3
P2P1
P5
42
165165Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
Autres fonctions de base ���� Courbes cardinale spline :
P1
P0
P5P4
P3
P2
P6
166166Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
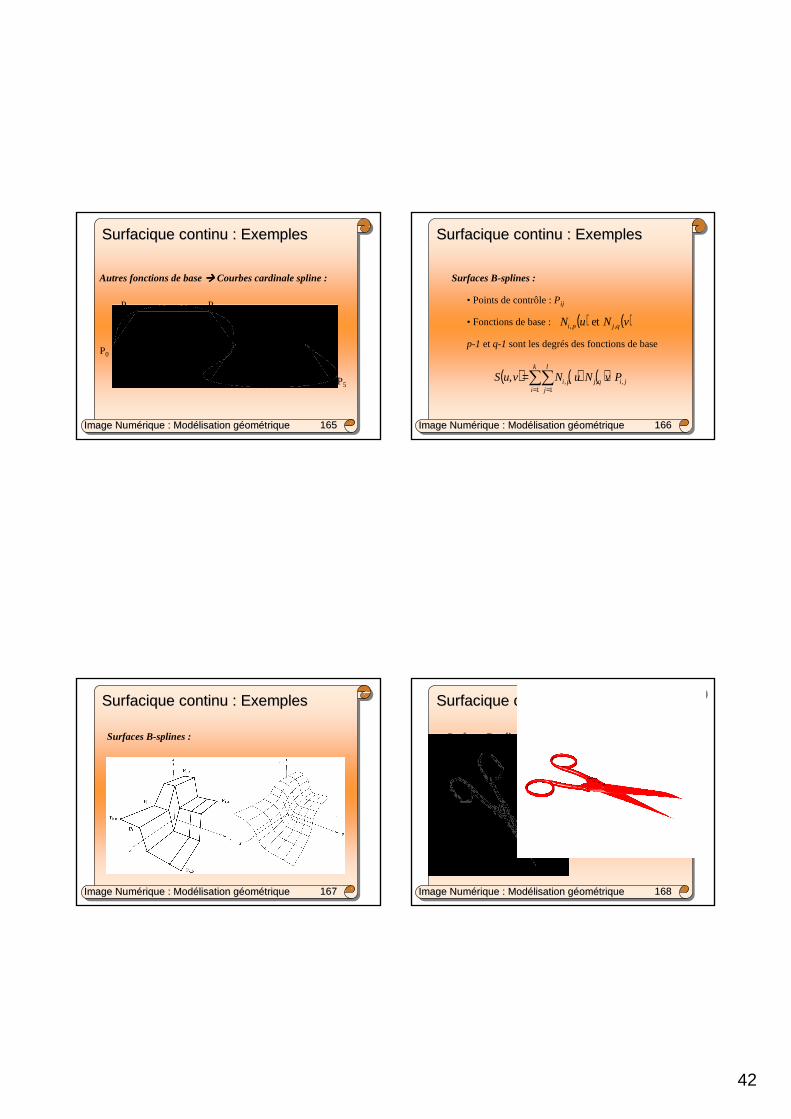
Surfaces B-splines :
• Points de contrôle : Pij
• Fonctions de base :
p-1 et q-1 sont les degrés des fonctions de base
( ) ( )vNuN qjpi ,, et
( ) ( ) ( ) ji
k
i
l
jqjpi PvNuNvuS ,
1 1,,, ∑∑
= =
=
167167Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
Surfaces B-splines :
168168Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
Surfaces B-splines :

43
169169Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
Surfaces B-splines :
170170Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu : ExemplesSurfacique continu : Exemples
Surfaces B-splines :
171171Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique continu Surfacique continu
Inconvénients:• Stockage peu compact.
• Mal adapté aux opérations booléennes.
• Problème de continuité lors des raccordements
de surfaces.
Avantages :
• Définition explicite.
• Grande variété de formes.
• Visualisation interactive (Z-buffer).
172172Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique discretSurfacique discret
On échantillonne une surface S en une liste de N
facettes si.
Le plus souvent si est triangulaire. Pourquoi ?
∑=
=N
iis
1
S

44
173173Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique discretSurfacique discret
Décomposition uniforme
Echantillonnage du domaine de variation du paramètre
dans le cas de surfaces paramétriques
174174Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique discretSurfacique discret
Décomposition adaptative
Echantillonnage selon des critères géométriques :
courbure,...
175175Image Numérique : Modélisation géométriqueImage Numérique : Modélisation géométrique
Surfacique discretSurfacique discret
Inconvénients:• Stockage peu compact.
• Mal adapté aux opérations booléennes.
• Définition approximative
• Surface C0
Avantages :
• Définition explicite.
• Applicable à n’importe quel objet.
• Visualisation interactive (Z-buffer).
176176

45
177177Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique : Extrusion
• Extrusion simple :
Axe : Courbe « gauche »
Section: cercle
=)(
)(
)(
)(
vz
vy
vx
vA
178178Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique extrusion
• Extrusion simple :
Axe : Courbe « gauche »
Section: cercle
179179Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique : Extrusion
• Etape 1: on définit les parallèles sur l’axe par une suite v0 , v1 , … vp
A(v0 )
A(vk)
A(vp)
180180Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique : Extrusion
• Etape 2: pour chaque point A(vk) on cherche le plan orthogonal à l’axe pour placer la section (repère de Frenet local).
A(vk)
)()(
)()(
εε
+
+=kk
kkk
vAvA
vAvATr
� Vecteur tangent :
46
181181Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique : Extrusion
• Etape 2: pour chaque point A(vk) on cherche le plan orthogonal à l’axe pour placer la section (repère de Frenet local).
)( ε−kvA
)( ε+kvA
)( kvA
−kTr
+kTr
kN'r
� Vecteur quasi-normal :
−+
−+
−−=
kk
kkk
TT
TTN rr
rrr'
(Tk et N’k ne sont pas colinéaires )
182182Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique : Extrusion
• Etape 2: pour chaque point A(vk) on cherche le plan orthogonal à l’axe pour placer la section (repère de Frenetlocal).
kkk TBNrrr
∧=
�Vecteur binormal:
�Vecteur normal:
kkk NTB 'rrr
∧=
),,),(( kkkk BNTvArrr
Repère de Frenet :
183183Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique : Extrusion• Etape 2: pour chaque point A(vk) on cherche le plan
orthogonal à l’axe pour placer la section (repère de Frenet local).
A(vk)
kT
kN
kB
),,),(( kkkk BNTvArrr
Repère de Frenet :
184184Image Numérique : construction 3DImage Numérique : construction 3D
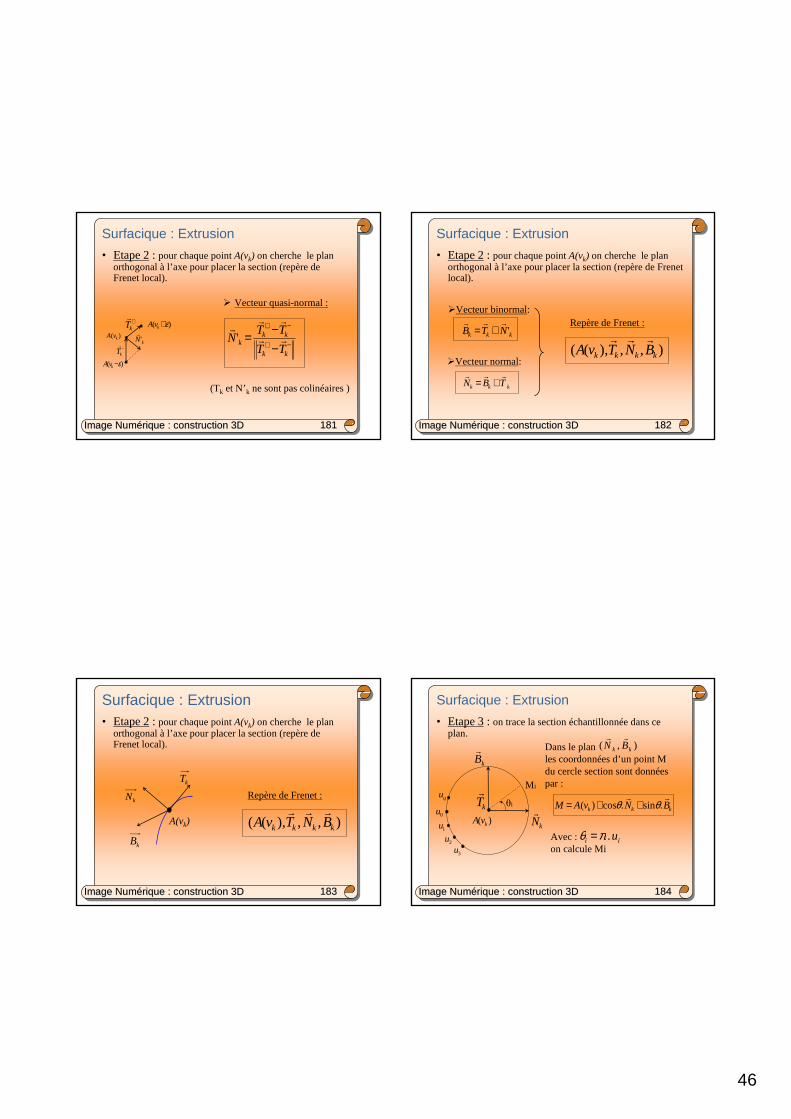
Surfacique : Extrusion
• Etape 3: on trace la section échantillonnée dans ce plan.
kTr
kBr
kNr
)( kvA0u
1u
2u
3u
quM i
Dans le planles coordonnées d’un point M du cercle section sont données par :
),( kk BNrr
kkk BNvAMrr
.sin.cos)( θθ ++=
Avec : on calcule Mi
ii u.πθ =
θi

47
185185Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique : Extrusion
• Etape 4: on génère les facettes.
186186Image Numérique : construction 3DImage Numérique : construction 3D
Cylindres Généralisés : extension
))(),(( ubuau a
Section de forme variable :
Exemple : jusqu’ici la section était circulaire :
==
uub
uua
ππ
sin)(
cos)(
187187Image Numérique : construction 3DImage Numérique : construction 3D
Surfacique : Extrusion
))(),(( ubuau a
Section de forme variable :
klklk BubNuavAMrr
).().()( ++=
Calcul du point M :
188188Image Numérique : construction 3DImage Numérique : construction 3D
Volumique: CSG
CSG : Géométrie Constructive des Solides
Principe : construire des solides de forme complexe en combinant des solides de forme simple (primitives) grâce à des opérations booléennes (union, intersection, différence)
Le solide est représenté par l’historique de sa construction sous la forme d’un arbre binaire dont les feuilles sont lesprimitives et les nœuds les opérations booléennes.

48
189189Image Numérique : construction 3DImage Numérique : construction 3D
Volumique: CSG
Exemple: construction d’une bobine
Primitives :• 3 cylindres• 2 cones
190190Image Numérique : construction 3DImage Numérique : construction 3D
Volumique: CSG
Exemple: construction d’une bobine
191191Image Numérique : construction 3DImage Numérique : construction 3D
Volumique: CSG
Exemple: construction d’une bobine
http://www.limsi.fr/
192192

49
193193DéformationsDéformations
Déformation :
But : Enrichir la gamme des formes possibles.
Principe : Elaborer des formes complexes par transformations successives de formes simples.
194194Image Numérique : déformationImage Numérique : déformation
Déformations axiales : Barr 84
Exemples :
Original Taper Twist Bend
195195Image Numérique : déformationImage Numérique : déformation
Déformations axiales : Barr 84
Exemples :
Original Taper Twist Bend
196196Image Numérique : déformationImage Numérique : déformation
FFD : Sederberg & Parry 86
FFD = FreeForm Deformation
Principe et Analogie: • On plonge l’objet à déformer dans un bloc
de « plastique » flexible de forme parallélépipédique.
• On déforme le bloc de « plastique », l’objet inclus est également déformé.
Utilisation : Dans des soft de haut niveau (Maya, SoftImage, …)
Domaine d ’application: Tous les modèles

50
197197Image numérique : déformation ?Image numérique : déformation ? 198198Image numérique : déformation ?Image numérique : déformation ?
Bump mapping
Principe : Perturbation de la normale à la surface. [Blinn 78].La géométrie de l’objet n’est pas modifiée.
199199Image numérique : déformation ?Image numérique : déformation ?
Displacement mapping :
Principe : Perturbation de la surface le long de la normale [Cook 84].
La géométrie de l’objet n’est pas modifiée !