BAB III PERANCANGAN DAN REALISASI...
17
21 BAB III PERANCANGAN DAN REALISASI SISTEM Pada bab ini akan dibahas tentang perancangan dan realisasi sistem dari setiap modul yang dibuat. Blok Diagram alat yang dibuat ditunjukkan oleh Gambar 3.1. UART Gambar 3.1. Blok Diagram Alat Keseluruhan. Secara garis besar pertama kali sinyal dikuatkan di Penguat Elektrokardiogram, penguat Elektrokardiogram berfungsi untuk memperkuat tegangan yang langsung berasal dari suatu sensor atau tranduser secara akurat. Penguat Elektrokardiogram adalah penguat tertutup, maka tidak perlu dipasang rangkaian umpan balik seperti halnya dengan penguat operasional[10]. Supaya sinyal masukan tetap maka diperlukan rangkaian penyangga atau buffer. Kemudian diolah di Notch Filter dengan gyrator. Sinyal di buffer dan diteruskan di rangkaian DC offset dan diteruskan di A/D Converter Mikrokontroler dan ditampilkan di layar PC. 3.1. Cara Kerja Alat Alat ini nantinya akan menampilkan sinyal isyarat jantung seseorang di layar PC. Alat ini terdiri dari modul penguat elektrokardiogram, modul buffer, modul Dc offset untuk menaikkan offset gelombang elektrokardiogram sehingga seluruh komponen gelombang elektrokardiogram menjadi positif Penguat Elektrokardiogram Buffer PC A/D Converter Mikrokontroler DC offset Buffer Notch Filter
Transcript of BAB III PERANCANGAN DAN REALISASI...

21
BAB III
PERANCANGAN DAN REALISASI SISTEM
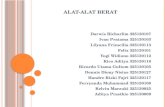
Pada bab ini akan dibahas tentang perancangan dan realisasi sistem dari setiap
modul yang dibuat. Blok Diagram alat yang dibuat ditunjukkan oleh Gambar 3.1.
UART
Gambar 3.1. Blok Diagram Alat Keseluruhan.
Secara garis besar pertama kali sinyal dikuatkan di Penguat Elektrokardiogram,
penguat Elektrokardiogram berfungsi untuk memperkuat tegangan yang langsung
berasal dari suatu sensor atau tranduser secara akurat. Penguat Elektrokardiogram
adalah penguat tertutup, maka tidak perlu dipasang rangkaian umpan balik seperti
halnya dengan penguat operasional[10]. Supaya sinyal masukan tetap maka diperlukan
rangkaian penyangga atau buffer. Kemudian diolah di Notch Filter dengan gyrator.
Sinyal di buffer dan diteruskan di rangkaian DC offset dan diteruskan di A/D Converter
Mikrokontroler dan ditampilkan di layar PC.
3.1. Cara Kerja Alat
Alat ini nantinya akan menampilkan sinyal isyarat jantung seseorang di
layar PC. Alat ini terdiri dari modul penguat elektrokardiogram, modul buffer,
modul Dc offset untuk menaikkan offset gelombang elektrokardiogram
sehingga seluruh komponen gelombang elektrokardiogram menjadi positif
Penguat Elektrokardiogram
Buffer
PC A/D Converter
Mikrokontroler DC offset Buffer
Notch Filter

22
dan dapat dibaca oleh ADC mikrokontroler, modul ADC mikrokontroler,
modul mikrokontroler sebagai pengolah data, PC sebagai penampil isyarat
sinyal janyung.
3.2. Perancangan dan Realisasi Perangkat Keras
Perancangan dan realisasi perangkat keras pada skripsi ini dibagi dalam
beberapa bagian yaitu :
3.2.1 Pengujian Perangkat Keras Secara Terpisah
1. Modul Penguat Elektrokardiogram
2. Modul Notch filter dengan gyrator
3. Modul Dc-offset
4. Modul Rangkaian Penyangga / Buffer
3.2.1.1. Modul Penguat Elektrokardiogram
Modul ini digunakan untuk membaca elektrokardiogram dari
pengguna.Sinyal dibaca dengan menggunakan kabel lead dimana pada
ujungnya ditempeli elektroda yang ditempelkan pada tangan kanan, tangan
kiri, dan kaki kanan.
Gambar 3.2.Kabel lead.
Gambar 3.3.Elektroda yang ditempel pada tangan dan kaki.

23
Gambar 3.4.Penempatan Elektroda pada tubuh manusia [11].
Gambar 3.5.Rangkaian penguat AD620.
Pin inverting dihubungkan ke tangan kanan, pin non-inverting
dihubungkan ke tangan kiri. Sedangkan kaki kanan dihubungkan ke
ground. Penguatan ditentukan sebesar 100 kali, dengan output yang
diharapkan sekitar 130mV, dengan input sekitar 1,3mV maka diperlukan
dengan penguatan sebesar 100 kali maka output yang diharapkan sekitar
130 mV dapat terpenuhi.
Output
+ V29V
+ V19V
R Leg
L Arm
R Arm
IN+IN- V+
V-OUTREF
RGRG
U1AD620
R1

24
Gambar 3.6. Rangkaian Notch Filter 50Hz [4].
1 10 100 1k 10k-42
-35
-28
-21
-14
-7
0
Xa: 50.85 Xb: 1.570 Yc: 0.000 Yd:-39.96
a-b: 49.28 c-d: 39.96
Ref=Ground X=frequency(Hz) Y=voltage(db)
d
cb a
A
10kHz
V5-15/15V
L10.03183H
C11314uF
R1100
R22.2k
R31
A
Sehingga nilai resistornya ditentukan persamaan berikut :
3.2.1.2.Modul Notch filter dengan gyrator
Notch Filter digunakan untuk menyaring frekuensi jala-jala PLN sebesar
50Hz. Gambar untai dan perhitungannya adalah sebagai berikut :
Gambar 3.7. Tanggapan Frekuensi Rangkaian Notch Filter 50Hz [4].

25
Penurunan Fungsi Transfer orde 2 melalui persamaan matematis
Sistem Elektrik
Dalam gambar dibawah ditunjukkan sebuah sistem rangkaian elektrik
yang terdiri dari R, L dan C, dimana sebagai tegangan input adalah e dan arus
output adalah i.
Dengan menerapkan hukum Kirchoff pada rangkaian diperoleh
persamaan sebagai berikut :
() + () +
(). = () ……….(3.1)
Transformasi Laplace persamaan (3.1) adalah
. () + . () +
() = () ……….(3.2)
Dengan demikian Fungsi transfer dari rangkaian elektrik diatas adalah:
()() =
……….(3.3)
Diagram Blok hubungan input dan output dari sitem diatas ditunjukan pada blok
dibawah ini :
+ +
= !
+ + = !
!" = =
= #!$
#!% + #!% + !% = !
!%(&# + # + 1) = !

26
()( =
()( =
*+
* *
…...…(3.4)
Perhitungan Notch Filter :
Pertama – tama untuk merancang notch filter yang perlu diperhatikan
adalah berapa nilai notch depth atau pelemahan dari notch filter yang ingin
dibuat. Dari gambar notch depth digambarkan pada titik lengkung pada fo.
Kemudian menghitung faktor kualitas dari rangkaian serta nilai dari resistor,
kapasitor, induktor..
Gambar 3.8. Transfer Function Rangkaian Notch Filter 50Hz.

27
Notch depth q = 20 log ,1 + -. [dB]
=20 log (1+%%
)
=20 log 101
=40,0864 Db
R2 >> R1 maka R2 = 2k2 Ω
Q = &/0"
- =
&/0"- = 0"∆0
= 2%
(2&,2456,2)
= 2%2
= 10
R3 = % 7)4
= %%%,))894
= %::,:::
= 1 Ω
L = 1 ;
&/0"
= 1 (%
&/.2%)
= %
-5,2: = 0,03183 H
C =
(&/0")
=
%,%-<-(&/.2%)
=
-5,5:2%
= 3,183 . 10 -4
= 0,3183 mF
≈ 314 µF

28
+
U6OPAMP5
+
U5OPAMP5
C13
314uF
C1211uF
9V
9V
-9V
-9V
50 Hz
V5-500m/500mV
R22k2
R1300
R11300
R12300
R13300
R1410
R16100
A
1 10 100 1k-42
-35
-28
-21
-14
-7
0
Xa: 50.59 Xb: 1.000 Yc:-42.00 Yd:-39.98
a-b: 49.59 c-d:-2.022
Ref=Ground X=frequency(Hz) Y=voltage(db)
dc
b aA
Gambar 3.9. Rangkaian Notch Filter 50Hz dengan Gyrator [3].
Gambar 3. 10. Tanggapan Frekuensi Rangkaian Notch Filter 50Hz dengan Gyrator [3].

29
+
U1OPAMP5
+
U2OPAMP5
C11
9V
9V
-9V
-9V
R41
R21
R31
R51
Perhitungan Notch Filter dengan gyrator :
Induktor simulasi
• Pengertian Konverter dan Inverter
Untuk menunjukkan dua jaringan port, impedansi input Zin dua
port jaringan ini diberikan oleh:
Inverter Jaringan: Di mana A = D = 0
=> = ?@ =
Converter Jaringan: Di mana B = C = 0
=> = A# =

30
• Gyrator
Simbol rangkaian dari gyrator dengan Matrix-T sebagai berikut:
Impedansi input dari girator ketika ZL impedansi beban
terhubung ke port output diberikan oleh:
Untuk yang ideal girator, r1 = r2 = r dan dalam hal ini kita
memiliki hubungan sebagai berikut:
! = BC &
! + !& = 0
!& = BC
Penerapan gyrator
Dari gambar di atas terlihat :
! = , + ( . + !& = E (
F! G = H 0 EE
0 I J !&E&K
+ ( = & E (
! = &

31
• Realisasi induktasi
L Ground = satu port jaringan
= !L
Contoh Realisasi L Ground
Zin
Untuk mewujudkan L Ground, ada dua pilihan :
=>M( M NO9OPNN8
Z1 Z2 Z3 Z4 Z5
R 1/SC r r r
R r r 1/SC r
=> = L#& 9P8 = #& 9P
8
=> = L#5 9P8 = #5 9P
8

32
+
U1OPAMP5
+
U2OPAMP5
C11
9V
9V
-9V
-9V
R41
R21
R31
R51
Maka berdasarkan rangkaian yang digunakan maka dapat
dihitung sebagai berikut:
• Bagian gyrator
Berdasarkan nilai-nilai komponen rangkaian terlihat bahwa semua
resistor gyrator memiliki nilai yang rendah yang dapat menjadi masalah
bagi kinerja penggerak op-amp. Walaupun sebagian besar op-amp
memang memiliki kinerja penggerak keluaran yang baik namun perangkat
catu daya yang kecil tidak memiliki kinerja penggerak keluaran yang
baik. Untuk mengatasi masalh ini, nilai resistansi dari resistor R4,R2,R3,
dan R5 dapat ditingkatkan dengan faktor pengali tertentu dengan
ketentuan faktor pengali gabungan dari R4,R3, dan R5 adalah sama
dengan faktor pengali R2 [3]. Maka faktor pengali ditentukan 300.
Maka :
R1= R2=R3=1 Ω x 300 = 300 Ω
C=
&/0Q
=
-%%.&/.2%

33
= 10,610 µF
≈ 11 µF
R5= L x 300
= 0.3183 x 300
= 9,549 Ω
≈ 10 Ω
• R3 di rangkaian = 1Ω x 300
= 300 Ω
3.2.1.3. Modul DC offset
Agar dapat digunakan sebagai masukan pada mikrokontroler, maka
sinyal keluaran dari untai ecg harus berada di antara 0 V - 5 V. Oleh
karena itu dirancang sebuah untai DC offset .
Berdasarkan hasil pengujian notch filter yang telah dilakukan
keluaran tertinggi pada frekuensi 1 Hz dengan masukan sebesar
1000mVpp diperoleh keluaran sebesar 920mVpp. Maka tegangan DC
offset yang diperlukan sebesar 500mVolt.
Nilai 500mVolt dipilih dengan pertimbangan bahwa:
5V
1 Hz
V5-500m/500mV C2
430uF
R69k
R51k
A
0 833m 1.67 2.5 3.33 4.17 50
200m
400m
600m
800m
1
1.2
Xa: 5.000 Xb: 0.000 Yc: 966.7m Yd: 0.000
a-b: 5.000 c-d: 966.7m
freq: 200.0m
Ref=Ground X=833m/Div Y=voltage
d
c
b aA

34
Gambar 3.12. Rangkaian Dc offset dengan penguatan.
Hasil pengujian notch filter yang telah dilakukan keluaran tertinggi
pada frekuensi 1 Hz dengan masukan sebesar 1000mVpp diperoleh
keluaran sebesar 920mVpp. Agar sinyal dapat terbaca maka tegangan
dioffsetkan sebesar 500mVolt sehingga sudah tidak ada yang negatif.
Dipakai pembagi tegangan:
Gambar 3.11. Rangkaian Pembagi Tegangan.
Rangkaian dan perhitungannya sebagai berikut :
Jika,
+=
21
2
RR
RVV to
……….(3.5)
Dari pembagi tegangan bisa kita hitung nilai komponen yang diperlukan.
Dibutuhkan tegangan 500 mVolt dan V masukan sebesar 5 Volt ,maka,
& =
%,22
R1= 9R2
nilai R2 = 1k Ω dan R1 = 9k Ω

35
Rangkaian ini berfungsi untuk menambah offset tegangan sinyal
elektrokardiogram sehingga sinyal elektrokardiogram menjadi positif dan dapat diterima
oleh ADC pada mikrokontroler. Penguatan dirumuskan sebagai berikut :
Av = 1 + 5-
= 1 + 5RR
= 5x
Dengan tegangan DC offset sebesar 500mVolt dan menggunakan penguatan 5 kali
maka DC offsetnya menjadi 2,5Volt. Maka ayunan sinyal sebesar 5Vpp dan dirasa
sudah cukup besar untuk dilanjutkan ke ADC.
3.2.1.4 Modul rangkaian penyangga atau Buffer
Gambar 3.13. Rangkaian Buffer / Penyangga.
Rangkaian buffer adalah rangkaian yang menghasilkan tegangan output
sama dengan tegangan inputnya. Dalam hal ini seperti rangkaian common colektor
yaitu berpenguatan = 1. Fungsi dari rangkaian buffer pada peralatan elektronika
adalah sebagai penyangga, dimana prinsip dasarnya adalah penguat arus tanpa
terjadi penguatan tegangan [24].
Pada nilai R yang terpasang pada rangkaian buffer tersebut, biasanya akan
memiliki fungsi yang berguna untuk membatasi arus yang di akan keluarkan oleh
rangkaian buffer ini.
Maka diperlukan rangkaian buffer untuk menstabilkan tegangan yang
keluar dari rangkaian penguat elektrokardiogram yang akan masuk ke rangkaian
notch filter serta tegangan yang keluar dari notch filter yag akan masuk ke rangkaian
dc-offset.
1kHz
V3-1/1V
-10V
+V
V110V
+
U1OPAMP5
R11k
A

36
Gambar 3.14. Rangkaian Mikrokontroler ATMega32.
Gambar 3.15. Diagram alir program mikrokontroler.
3.2.2. Pengujian Perangkat Keras Keseluruhan
Pengujian perangkat keras secara keseluruhan dilakukan dengan
menggabungkan keseluruhan modul yang disertai dengan dokumentasi gambar.
3.3 Perancangan dan Realisasi Perangkat Lunak
3.3.1. Modul Mikrokontroler
Pada skripsi ini menggunakan mikrokontroler keluarga AVR dengan
chip ATMega32. Berikut ini adalah gambar rangkaiannya :
Diagram alir program mikrokontroler :
START
Sampling ADC
Kirim ke PC melalui serial

37
Source codenya sebagai berikut menggunakan Code Vision AVR :
#include <mega32.h> #include <stdio.h> #include <delay.h> #define ADC_VREF_TYPE 0x60 unsigned char read_adc(unsigned char adc_input)
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff); delay_us(10); ADCSRA|=0x40; while ((ADCSRA & 0x10)==0); ADCSRA|=0x10; return ADCH;
void main(void)
….. ….. ….. while (1)
putchar(read_adc(0)); delay_ms(10) ;