AVALIAÇÃO DOS PARÂMETROS DA TÉCNICA DA … · the tougnhness of the material was defined...
141
i AVALIAÇÃO DOS PARÂMETROS DA TÉCNICA DA CORRELAÇÃO DIGITAL DE IMAGEM PARA O CÁLCULO DA INTEGRAL-J DINÂMICA EM MATERIAIS COMPÓSITOS Daniel Scandiuzzi Valença de Castro Projeto de Graduação apresentado ao Curso de Engenharia de Materiais da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientadores: Enrique Mariano Castrodeza Rafael de Azevedo Cidade Rio de Janeiro Setembro de 2017
-
Upload
phungquynh -
Category
Documents
-
view
212 -
download
0
Transcript of AVALIAÇÃO DOS PARÂMETROS DA TÉCNICA DA … · the tougnhness of the material was defined...

i
AVALIAÇÃO DOS PARÂMETROS DA TÉCNICA DA CORRELAÇÃO DIGITAL DE
IMAGEM PARA O CÁLCULO DA INTEGRAL-J DINÂMICA EM MATERIAIS
COMPÓSITOS
Daniel Scandiuzzi Valença de Castro
Projeto de Graduação apresentado ao Curso de
Engenharia de Materiais da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como parte
dos requisitos necessários à obtenção do título de
Engenheiro.
Orientadores: Enrique Mariano Castrodeza
Rafael de Azevedo Cidade
Rio de Janeiro
Setembro de 2017


iii
Castro, Daniel S. V.
Avaliação dos parâmetros da técnica da correlação
digital de imagem para o cálculo da integral-J dinâmica
em materiais compósitos / Daniel Scandiuzzi Valença de
Castro.– Rio de Janeiro: UFRJ/ Escola Politécnica, 2017.
XVI, 141 p.: il; 29,7 cm.
Orientadores: Enrique Mariano Castrodeza
Rafael de Azevedo Cidade
Projeto de graduação – UFRJ/Escola Politécnica/ Curso de
Engenharia de Materiais, 2017.
Referências Bibliográficas: p.99-111.
1.Materiais Compósitos. 2.Correlação Digital de
Imagem. 3.Integral-J. 4. Fratura. I. Castrodeza, Enrique
Mariano et al.. II. Universidade Federal do Rio de Janeiro,
Escola Politécnica, Curso de Engenharia de Materiais. III.
Avaliação dos Parâmetros da Técnica da Correlação
Digital de Imagem para o Cálculo da Integral-J Dinâmica
Em Materiais Compósitos

iv
Dedico este trabalho à minha bisavó Ada (in memoriam)

v
Agradecimentos
Primeiramente, agradeço a minha família, minha fortaleza e base de todas as minhas
conquistas. Agradeço todo o amor, carinho, educação e sorrisos que sempre me
proporcionaram e que me tornaram a pessoa que sou hoje.
Aos meus amigos da UFRJ, pelos grandes momentos que passamos juntos. Agradeço
cada risada, cada conversa, cada churrasco, cada futebol, cada viagem, cada noite de estudos.
Obrigado por fazer meus dias na universidade cada vez melhores.
Ao querido professor Bastian (in memorian) por toda orientação acadêmica e de vida,
por acreditar no meu potencial, pela oportunidade de fazer parte do laboratório de compósitos
e por todas as conversas que me motivaram cada dia mais a realizar todo o meu trabalho com
excelência.
Ao meu amigo e co-orientador Rafael Cidade, que me ajudou imensamente em toda
esta caminhada, se mostrando sempre disposto a sanar minhas duvidas e debater os mais
diversos tópicos, até mesmo as ideias geniais e loucas que só ele entende.
Ao professor Enrique Castrodeza, por toda orientação acadêmica e toda ajuda na reta
final da minha graduação, se mostrando uma grande pessoa e professor perante todas as
dificuldades.
À professora Isabel Margarit e toda a equipe de corrosão do LNDC, por todos os bons
momentos em que vivi no laboratório durante minha iniciação científica. Agradeço muito por
toda ajuda e por todo o maravilhoso ambiente de trabalho proporcionado.
Ao professor Dilson dos Santos, por todas as conversas e orientações de vida e
também por acreditar no meu potencial de realizar um grande intercâmbio internacional.
A professora Gabriela Ribeiro Pereira, por toda orientação acadêmica durante a minha
graduação.
Ao Professor Gregory Berthomé e toda a equipe do Laboratório de Superfícies e
Interfaces do Instituto Nacional Politécnico de Grenoble, pela oportunidade estagiar neste
local maravilhoso e por todo o aprendizado e intercâmbio cultural proporcionado durante
minha estadia.

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte dos
requisitos necessários para obtenção do grau de Engenheiro de Materiais.
AVALIAÇÃO DOS PARÂMETROS DA TÉCNICA DA CORRELAÇÃO DIGITAL DE
IMAGEM PARA O CÁLCULO DA INTEGRAL-J DINÂMICA EM MATERIAIS
COMPÓSITOS
Daniel Scandiuzzi Valença de Castro
Setembro/2017
Orientadores: Enrique Mariano Castrodeza
Rafael de Azevedo Cidade
Curso: Engenharia de Materiais
Materiais compósitos são cada vez mais utilizados em estruturas contendo concentradores
de tensão e expostas a carregamentos dinâmicos. Nesse regime a medição de tensões e
deformações pelos métodos tradicionais apresenta limitações. Com isto, metodologias alternativas
têm sido propostas, dentre elas a correlação digital de imagem (DIC). Este método é bastante
sensível a diversos parâmetros e exige calibrações para que a escolha dos mesmos ocorra de
forma apropriada. Correlação digital de imagem e modelos de cálculo da Integral-J foram
utilizados para estimar a tenacidade à fratura dinâmica de compósitos laminados de matriz epóxi
reforçados por fibras de carbono. Corpos de prova de compressão com duplo entalhe lateral
(DENC) foram testados em uma barra Hopkinson e filmados por uma câmera de alta resolução
temporal. Essas imagens foram processadas mediante DIC mudando diversos parâmetros, visando
otimizar a análise. De posse dos campos definidos pelo DIC, a Integral-J dinâmica foi calculada
pelo método de integral de contorno. Finalmente, a tenacidade do material foi definida segundo o
critério da tensão máxima de teste. Os resultados foram analisados estatisticamente. A técnica
utilizada demonstrou-se aplicável, fornecendo valores de tenacidade à fratura compatíveis com os
da literatura, mas a alta sensibilidade do DIC exige a calibração precisa dos equipamentos e
parâmetros a serem utilizados.
Palavras Chave: Materiais Compósitos, Correlação Digital de Imagem, Integral-J,
Carregamento dinâmico, Fratura.

vii
Abstract of Undergraduate Project presented do POLI/UFRJ as a partial fulfillment of
the requirements for the degree of Materials Engineer
EVALUATION OF THE PARAMETERS OF THE DIGITAL IMAGE CORRELATION
TECHNIQUE FOR THE CALCULATION OF INTEGRAL-J DYNAMICS IN COMPOSITE
MATERIALS
Daniel Scandiuzzi Valença de Castro
September/2017
Advisors: Enrique Mariano Castrodeza
Rafael de Azevedo Cidade
Couse: Materials Engineering
Composite materials are increasingly used in structures containing stress concentrators and
exposed to dynamic loads. In this regime the measurement of stress and strain by
traditional methods has limitations. Thus, alternative methodologies have been proposed,
among them the digital image correlation (DIC). This method is very sensitive to several
parameters and requires calibrations so that the choice of these parameters is appropriate.
Digital image correlation and Integral-J calculation models were used to estimate the
dynamic fracture toughness of carbon fiber reinforced epoxy matrix composites. Double
edge notched compression test specimens (DENC) were tested on a Hopkinson bar and
were recorded by a high resolution temporal camera. These images were processed by DIC
changing several parameters, in order to optimize the analysis. From the fields defined by
the DIC, the Integral-J dynamics was calculated by the integral contour method. Finally,
the tougnhness of the material was defined according to the criterion of the maximum test
stress. The results were statistically analyzed. The technique used has been shown to
provide fracture toughness values compatible with those in the literature, but the high
sensitivity of the DIC requires the precise calibration of the equipment and parameters to
be used.
Keywords: Composite Materials, Digital Image Correlation, Integral-J, Dynamic Loading,
Fracture.

viii
Sumário
1. INTRODUÇÃO ................................................................................................................. 1
2. REVISÃO BIBLIOGRÁFICA ........................................................................................... 4
2.1 Compósitos Pré-Impregnados .......................................................................................... 4
2.2 Mecanismo de Falha em Compressão – Kink-Bands ....................................................... 5
2.3 Efeito da Taxa de Carregamento ................................................................................. 7
2.4 Fratura Dinâmica ....................................................................................................... 10
2.5 Tenacidade em Compressão ...................................................................................... 12
2.6 Mecânica dos Laminados .......................................................................................... 14
2.7 Correlação Digital de Imagem ................................................................................... 17
2.7.1 Classificação e Vantagens .................................................................................. 17
2.7.2 Evolução da Técnica .......................................................................................... 19
2.7.3 Aplicação em Materiais Compósitos .................................................................. 20
2.7.4 Cálculo de Parâmetros de Fratura ...................................................................... 23
2.8 Funcionamento da Técnica ........................................................................................ 29
2.8.1 Leitura dos Dados ............................................................................................... 29
2.8.2 Critérios de Correlação ....................................................................................... 30
2.8.3 Padrão de Manchas ............................................................................................. 31
2.8.4 Caracterização das Manchas .............................................................................. 35
2.8.5 Aparato Experimental ........................................................................................ 38
2.9 Parâmetros de Análise ............................................................................................... 39
2.9.1 Subconjuntos ...................................................................................................... 39
2.9.2 Tamanho de Passo .............................................................................................. 43
2.9.3 Raio de Deformação ........................................................................................... 43
2.10 Erros Associados .................................................................................................... 45
2.11 Correlação Digital de Imagem em Carregamentos Dinâmicos .............................. 46
2.12 Integral-J ................................................................................................................ 49
2.12.1 Tenacidade à Fratura .......................................................................................... 49
2.12.2 Integral-J: Definição Clássica ............................................................................ 49
2.12.3 Forma Alternativa de J ....................................................................................... 52
2.12.4 Integral J para Fratura Dinâmica ........................................................................ 53
2.12.5 O Uso da Integral-J Dinâmica ............................................................................ 55

ix
2.12.6 Trincas em Estado Estacionário ......................................................................... 56
2.12.7 Utilização Antes da Propagação ......................................................................... 56
3. MATERIAIS E MÉTODOS ............................................................................................ 58
3.3 Corpos de Prova de Fibra de Carbono ....................................................................... 58
3.4 Ensaio de Carregamento Dinâmico ........................................................................... 60
3.5 Correlação Digital de Imagem ................................................................................... 61
3.5.1 Aquisição de Imagem ......................................................................................... 61
3.5.2 Critério de Iniciação de Defeito ......................................................................... 63
3.6 Análise da Imagem .................................................................................................... 64
3.6.1 Caracterização do Padrão de Manchas ............................................................... 64
3.6.2 Preparação da Imagem ....................................................................................... 64
3.6.3 Análise Estatística da Morfologia ...................................................................... 66
3.6.4 Modelo de Seleção do Subconjunto ................................................................... 69
3.6.5 Definição dos Parâmetros ................................................................................... 70
3.6.6 Obtenção de Dados com o Software Ncorr ........................................................ 71
3.7 Preparação dos Dados ................................................................................................ 71
3.7.1 Dimensionamento do tamanho do corpo de prova ............................................. 71
3.7.2 Transformações de Escala .................................................................................. 72
3.7.3 Grandezas em Relação ao Tempo ...................................................................... 72
3.7.4 Cálculo das Deformações ................................................................................... 73
3.8 O cálculo da Integral J ............................................................................................... 73
3.8.1 Método da Integral de Contorno ........................................................................ 74
3.8.2 Avaliação da Sensibilidade com o Tempo ......................................................... 76
3.8.3 Avaliação da Sensibilidade com o Raio de Deformação ................................... 77
3.9 Análise Estatística ...................................................................................................... 77
4. RESULTADOS E DISCUSSÃO ..................................................................................... 80
4.3 Caracterização das Imagens ....................................................................................... 80
4.3.1 Fração Coberta pelas Manchas ........................................................................... 80
4.3.2 Cálculo do Modelo para os Subconjuntos .......................................................... 81
4.4 Ensaios de Impacto Dinâmico ................................................................................... 82
4.5 Correlação Digital de Imagem ................................................................................... 83
4.6 Integral-J .................................................................................................................... 86
4.6.1 Avaliação da Sensibilidade com o Tempo ......................................................... 86

x
4.6.2 Valores da integral-J ........................................................................................... 88
4.6.3 Análise Estatística .............................................................................................. 93
4.6.4 Comparação com Resultados na Literatura ........................................................ 97
5. Conclusões ....................................................................................................................... 99
6. Sugestões para Trabalhos Futuros .................................................................................. 100
7. Bibliografia ..................................................................................................................... 101
8. ANEXO I ........................................................................................................................ 114
9. ANEXO II ...................................................................................................................... 116
10. ANEXO III .................................................................................................................. 119
11. ANEXO IV .................................................................................................................. 122

xi
LISTA DE FIGURAS
Figura 1 - Diagrama de Asbhy relacionando tensão de ruptura e densidade (adaptado de [2]) . 1
Figura 2 - Comparativo temporal do valor do mercado sobre compósitos de fibra de carbono
(adaptado de [3]) ........................................................................................................................ 2
Figura 3 - Representação do processo de pré-impregnação industrial [5] ................................. 5
Figura 4 - a) Fotomicrografia de uma kink band b) Representação convencional de uma kink
band [6] ...................................................................................................................................... 7
Figura 5 - Comportamento compressivo longitudinal para compósitos carbono/epóxi em
diferentes taxas de carregamento (adaptado de [12]). ................................................................ 8
Figura 6 - Gráficos tensão x deformação obtidos por KORBER [15] para compósitos de fibra
de carbono em solicitação compressiva longitudinal e transversal (adaptado de [15]). ............ 9
Figura 7 - Comportamento da carga em relação ao tempo para um carregamento dinâmico
[19] ........................................................................................................................................... 11
Figura 8 - Modelo de corpo de prova compact compression utilizado por CATALANOTTI et
al. [22]. ..................................................................................................................................... 12
Figura 9 - Representação do ângulo entre os eixos principais do material e as coordenadas
consideradas (adaptado de [1] ) ................................................................................................ 15
Figura 10 - Representação das camadas de um laminado com seus respectivos índices ......... 16
Figura 11 - Utilização do DIC 3D para avaliação de campos de deformação em tubos de
compósito [56] .......................................................................................................................... 22
Figura 12 - Mapa de deformação em micro-escala gerado por DIC para analisar esforços
interfibras [60]. ......................................................................................................................... 22
Figura 13 - Representação esquemática da discretização da Integral-J para dados gerados por
correlação digital de imagem. .................................................................................................. 23
Figura 14 - Caminhos utilizados por JIANG et al. [66] para o cálculo da integral-J, variando
em tamanho (a) e em localização (b)........................................................................................ 24
Figura 15 - Comparação dos valores de deformação para o DIC e para simulação numérica
[67]. .......................................................................................................................................... 25
Figura 16 - Comparação dos valores de integral-J calculados para diferentes aberturas de
trinca, tamanhos de caminho e presença de rotações fora do plano (adaptado de [68]). ......... 26
Figura 17 - Variação dos valores calculados de J para diferentes caminhos, e também
comparado com a técnica do CTOD (adaptado de [71]). ......................................................... 27

xii
Figura 18 - Comparação da medida da integral J pelo método DIC (azul) com outras
metodologias (adaptado de [72]). ............................................................................................. 28
Figura 19 - Curva de integral-J em relação ao deslocamento para diferentes contornos em
pequenas deformações e grandes deformações (adaptado de [73]). ........................................ 29
Figura 20 - Representação do cálculo do vetor deslocamento utilizando a correlação digital de
imagem (adaptado de [15]) ...................................................................................................... 30
Figura 21- Estudo comparativo de precisão de medição de deformação de dois métodos de
aplicação das manchas (adaptado de [78]). .............................................................................. 32
Figura 22 - Exemplos de redes apropriadas para correlação [74] ............................................ 34
Figura 23 - Gráfico do percentual acumulativo dos tamanhos de Manchas, em pixels, para
diferentes resoluções (adaptado de [78]). ................................................................................. 36
Figura 24 - Relação do desvio padrão da medida da deformação de acordo com o tamanho das
manchas e sua quantidade por subconjunto [78]. ..................................................................... 37
Figura 25 - Aparato experimental para captação das imagens. ................................................ 38
Figura 26- Gráfico correlacionando o erro da medida do deslocamento com o tamanho de
subconjunto em deformações homogêneas (adaptado de [78])................................................ 40
Figura 27 - Erro da medida de deslocamento em relação ao tamanho do subconjunto, para
deformações heterogêneas (adaptado de [78]). ........................................................................ 41
Figura 28 - Representação esquemática da zona de interpolação para cálculo da deformação
(adaptado de [76]). ................................................................................................................... 44
Figura 29 -Influência do raio de deformação nos valores medidos de deformação (adaptado de
[99]). ......................................................................................................................................... 45
Figura 30 - Exemplo de medição da propagação da onda mecânica em um corpo através do
campo de deslocamento gerado pela correlação digital de imagem [108]. .............................. 47
Figura 31 - Comparação das deformações locais em 3 regiões do corpo de prova de acordo
com o tempo (adaptado de [108])............................................................................................. 48
Figura 32 - Representação esquemática dos termos utilizados no calcula da integral-J .......... 51
Figura 33 - Modelo dos corpos de prova DENC utilizados. .................................................... 59
Figura 34 - Representação esquemática do funcionamento da barra Hopkinson de pressão. .. 60
Figura 35 - Posicionamento do aparato para os ensaios. Câmera posicionada em frente ao
local de impacto na peça. ......................................................................................................... 62
Figura 36 - a,b) Imagens de peças antes da fratura, c) Imagem de peça durante propagação da
trinca, d) Imagem de peça completamente fraturada. .............................................................. 63
Figura 37 - Imagem do corpo de prova após ajuste de brilho e contraste ................................ 65

xiii
Figura 38 - Imagem do corpo de prova após tratamento de brilho e contraste, seguida de
binarização. .............................................................................................................................. 65
Figura 39 - Imagem do corpo de prova após tratamento completo .......................................... 66
Figura 40 - Representação do diâmetro de Feret do e da distância ao vizinho mais próximo . 67
Figura 41 - Histograma do diâmetro de Feret .......................................................................... 68
Figura 42 - Histograma do caminho livre médio ..................................................................... 68
Figura 43 - Representação esquemática do modelo geométrico proposto para o tamanho dos
subconjuntos. ............................................................................................................................ 70
Figura 44 - Representação do contorno utilizado e suas faces componentes ........................... 75
Figura 45 - Representação das dimensões do contorno utilizado em relação ao corpo de prova.
.................................................................................................................................................. 76
Figura 46 - Gráfico representando a fração coberta das manchas (o tamanho dos corpos de
prova aumenta da esquerda para a direita). .............................................................................. 80
Figura 47 - Campos de deslocamentos horizontais e verticais gerados pela correlação digital
de imagem para corpo de prova A1. ........................................................................................ 84
Figura 48 - Campos de deformações horizontais e verticais para o corpo de prova C1. ......... 85
Figura 49 - Campos de deformação horizontal e vertical para o corpo de prova A2 ............... 86
Figura 50 - Campos de deformação horizontal e vertical para o corpo de prova C2 ............... 86
Figura 51 - Variação temporal da J para amostras A. .............................................................. 87
Figura 52 - Variação temporal da J para amostras B. .............................................................. 87
Figura 53 - Variação temporal da J para amostras C. .............................................................. 87
Figura 54 - Variação temporal da J para amostras A. .............................................................. 88
Figura 55 - Valores de J para as amostras A ............................................................................ 92
Figura 56 - Valores de J para as amostras B ............................................................................ 92
Figura 57 - Valores de J para as amostras C ............................................................................ 92
Figura 58 - Valores de J para as amostras D ............................................................................ 93
Figura 59 - Variabilidade de J para as amostras A ................................................................... 94
Figura 60 - Variabilidade de J para as amostras B ................................................................... 95
Figura 61 - Variabilidade de J para as amostras C ................................................................... 95
Figura 62 - Variabilidade de J para amostras D ....................................................................... 96
Figura 63 - Medida de deformação em linha B-C do contorno utilizado para o calculo de J
(Amostra C1) ............................................................................................................................ 97

xiv
LISTA DE SÍMBOLOS
wkb Comprimento da zona de fibras fraturadas na kink band
𝜎𝑖𝑗 Componente do tensor de tensões
Q Matriz de rigidez reduzida para um compósito ortotrópico em estado plano
de tensões
Εij Componente do tensor de deformações
ϒ𝑥𝑦 Deformação de cisalhamento de engenharia no plano x-y
ν Coeficiente de Poisson
𝐺𝑥𝑦 Módulo de cisalhamento no plano x-y
θ Ângulo entre os eixos associados à direção de carregamento e os eixos
principais da camada do laminado
T Matriz de transformação
Qk Matriz de rigidez para a k-ésima camada do laminado
A Matriz de rigidez global
B Matriz de acoplamento
D Matriz de rigidez à flexão
κ Curvatura devido à flexão
휀0 Deformação no plano médio do laminado
Nx,Ny,Nxy Componentes das forças atuantes no plano x-y
t Espessura do laminado
Ex, Ey Módulo de compressão longitudinal, Módulo de compressão transversal
u Deslocamento horizontal
v Deslocamento vertical
W Densidade de energia de deformação
J Valor da integral J
Γ Representação do contorno utilizado para o cálculo de J

xv
T Vetor representando as tensões atuantes em determinado plano
nj Vetor normal ao contorno
δ Função delta de Kronecker
ρ Densidade do material
U Termo associado à energia cinética
v’ Velocidade de propagação
F(Γ) Fluxo de energia através de uma superfície limitada por Γ
Gd Taxa de liberação de energia dinâmica
Jd Valor da Integral-J dinâmica
C Área limitada pelo contorno Γ
db Diâmetro da barra incidente
W Metade da largura do corpo de prova
R Raio do entalhe do corpo de prova
a Comprimento do entalhe
Rsub Raio do subconjunto calculado pelo modelo proposto
D95% Valor do Diâmetro de Feret englobando 95% dos diâmetros presentes
NND95% Valor do caminho livre médio englobando 95% dos caminhos presentes
ax , ay Aceleração na direção horizontal, aceleração na direção vertical
JInercial Termo inercial da integral-J
JClássico Termo clássico da integral-J
h Metade da altura do contorno
L Metade do comprimento do contorno
Xij Componente da matriz X dos valores analisados por um teste de Kruskal-
Wallis
rij Componente da matriz r dos valores em ranking

xvi
N Número de observações
k Número de grupos (equivale ao número de raios de deformação analisados)
μ Média de uma população
α Grau de significância
1
1. INTRODUÇÃO
Com a evolução da tecnologia ao longo do último século, cada vez maiores desafios em
relação a descoberta de novos materiais foram lançados, e dentre estes desafios estava o de
encontrar materiais que fossem leves, porém de grande resistência, visando substituir
materiais metálicos e cerâmicos em diversas aplicações. Nesse contexto, desenvolveu-se a
criação e o estudo de materiais compósitos, que são aqueles compostos por 2 ou mais
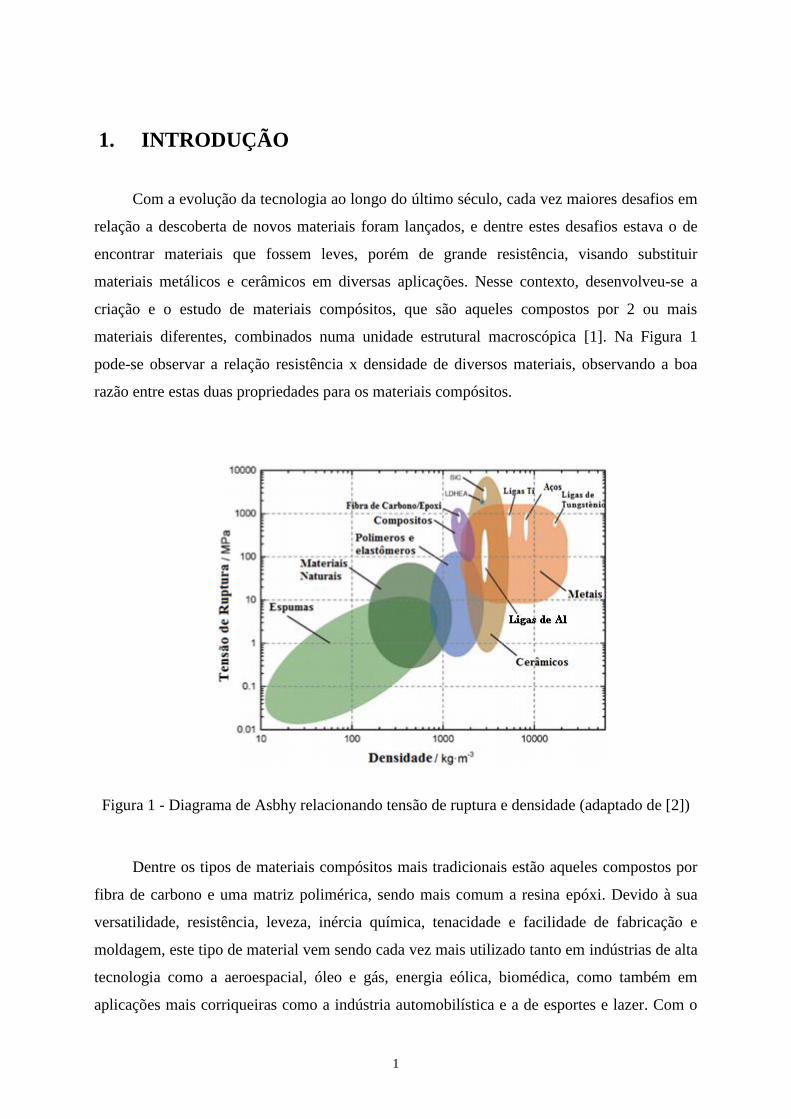
materiais diferentes, combinados numa unidade estrutural macroscópica [1]. Na Figura 1
pode-se observar a relação resistência x densidade de diversos materiais, observando a boa
razão entre estas duas propriedades para os materiais compósitos.
Figura 1 - Diagrama de Asbhy relacionando tensão de ruptura e densidade (adaptado de [2])
Dentre os tipos de materiais compósitos mais tradicionais estão aqueles compostos por
fibra de carbono e uma matriz polimérica, sendo mais comum a resina epóxi. Devido à sua
versatilidade, resistência, leveza, inércia química, tenacidade e facilidade de fabricação e
moldagem, este tipo de material vem sendo cada vez mais utilizado tanto em indústrias de alta
tecnologia como a aeroespacial, óleo e gás, energia eólica, biomédica, como também em
aplicações mais corriqueiras como a indústria automobilística e a de esportes e lazer. Com o

2
avanço da tecnologia e dos métodos de produção deste tipo de material, há uma tendência
para aumento da produtividade e diminuição dos preços, alavancando ainda mais o mercado
deste material, a ponto de chegar a previstos 35 bilhões de dólares em 2020, apresentando um
crescimento de cerca de 133% em relação ao valor do mercado em 2013 e demonstrando um
grande aumento da sua utilização em um curto período de tempo, conforme observado na
Figura 2 [3].
Figura 2 - Comparativo temporal do valor do mercado sobre compósitos de fibra de carbono
(adaptado de [3])
Dentre os ramos de aplicação mais comuns, como os citados anteriormente, em grande
parte utiliza-se este material em movimento, sujeito a cargas dinâmicas e a impactos que
podem ocorrer a qualquer momento como, por exemplo, o pouso de um avião com sua
estrutura feita de fibra de carbono, a colisão de um automóvel, uma bicicleta rodando sobre
um terreno irregular, uma hélice de um cata-vento girando em alta velocidade, etc. Assim
sendo, devido à vasta gama de aplicações envolvendo a possibilidade de carregamento
dinâmico, torna-se de extrema importância a medida da tenacidade deste material sob este
tipo de solicitação.
Nesse contexto, o motivo do presente trabalho é utilizar a metodologia do cálculo de
integral-J dinâmica para estimar o valor da tenacidade de um compósito laminado de fibra de

3
carbono/ epóxi com base nos campos de deformação obtidos por meio da técnica da
correlação digital de imagem, avaliando os parâmetros de análise utilizados.
O presente trabalho foi realizado em paralelo com a elaboração de uma tese de doutorado
de CIDADE [4], que já conta com alguns resultados preliminares, reportados em um seminário,
Painel PEMM 2016.

4
2. REVISÃO BIBLIOGRÁFICA
2.1 Compósitos Pré-Impregnados
Compósitos pré-impregnados ou, comercialmente ditos, prépregs, são aqueles com as
fibras contínuas impregnadas em uma resina polimérica que é apenas parcialmente curada.
Este material é entregue na forma de uma fita para o utilizador, que a seguir molda
diretamente e cura completamente o produto sem ter que adicionar nenhuma resina. Este é
provavelmente o material compósito mais utilizado para aplicações estruturais e industriais
visto que sua resistência é maior quando comparada com outros processos como a pultrusão e
a laminação manual. Assim sendo, estes produtos são considerados produtos intermediários e
prontos para moldagem.
O conjunto matriz polimérica / fibra de reforço (pré-impregnado) é fornecido ao
moldador com proteção contra eventuais contaminações constituída por camadas de filmes
separadores, geralmente de polietileno liso ou corrugado. Os pré-impregnados têm as
seguintes vantagens em relação aos demais métodos de produção de peças de compósitos:
integridade física durante o manuseio, maior tempo de utilização e armazenagem, dependendo
da temperatura de armazenagem; viscosidade controlada para facilitar processamento, ciclos
de cura e propriedades mecânicas que podem ser ajustados de acordo com a necessidade,
toxicidade reduzida e garantia da qualidade do desempenho do conjunto matriz polimérica /
fibra de reforço podendo esta ser avaliada mediante testes de controle de qualidade após a
fabricação dos componentes [5]. Por estes motivos, este tipo de material é amplamente
utilizado em aplicações mais refinadas como indústria aeroespacial, naval e de óleo e gás.
O processamento deste material começa pela colimação de uma série de mechas de
fibras contínuas enroladas numa bobina. Essas mechas geralmente passam por um banho de
imersão da resina com seu endurecedor e em seguida são “sanduichadas” e prensadas entre
chapas de papel de liberação e condução usando rolos aquecidos, em um processo
denominado calandragem, demonstrado na Figura 3. Estas folhas de papel de descarga estão,
então, recobertas com um filme fino de solução de resina aquecida de relativamente baixa
viscosidade de maneira a fornecer a completa impregnação das fibras. Uma lâmina de metal
espalha a resina num filme de espessura e largura uniforme. O produto final consiste em uma

5
fita fina de fibras contínuas e alinhadas embutidas numa resina parcialmente curada. Visto
que a cura não foi completa, é essencial manter o material em temperatura adequada,
geralmente abaixo de 0°C, para que não ocorra a cura antes do momento desejado [1].
Figura 3 - Representação do processo de pré-impregnação industrial [5]
2.2 Mecanismo de Falha em Compressão – Kink-Bands
As falhas de compósitos em compressão têm recebido atenção especial dos pesquisadores
ao longo das ultimas décadas por ocorrer a níveis próximos à 50-60% do limite de ruptura em
tensão. O mecanismo amplamente mais aceito para este tipo de falha consiste na formação e
propagação das kink-bands, que são faixas de dobramento das fibras, dentro das quais estas
possuem determinada mudança de orientação devido à sua quebra e onde, também, a matriz
sofre deformação de cisalhamento devido à microflambagem das fibras. Uma outra forma de
defini-las consiste em considerá-las uma fileira de fissuras paralelas de cisalhamento axial
combinado com fibras microflambadas [6].
Este mecanismo é fonte de um grande debate acadêmico e existem, atualmente, duas
linhas de pensamento principais sobre a sua formação. Primeiramente, ROSEN [7] propôs que
as kink-bands são formadas devido à microflambagem das fibras, sem qualquer processo de
fratura anterior. O mesmo propôs que a tensão compressiva em fibras longitudinais iria
alcançar um valor no qual o suporte lateral à essas fibras, provido pela matriz, iria ser

6
excedido. Consequentemente, as fibras iriam flambar além do seu limite e fraturar nos pontos
de máxima flexão. O carregamento subsequente espalhado sobre as fibras adjacentes
desencadeia a falha destas, resultando na formação da kink-band e, finalmente, na falha
catastrófica do material. Segundo este modelo, a rigidez da matriz exerce forte influência no
processo, visto que esta que é responsável por evitar o dobramento da fibra por flambagem.
Por outra linha de pensamento, ARGON [8] sugeriu que a separação das camadas ocorre
antes da microflambagem, e assim, posteriormente, começa a formação das kink-bands.
Durante a progressão destas, foi sugerido que uma zona de separação de camadas se
desenvolve à frente da kink-band, com o espaço de separação reduzindo à medida que a kink-
band se aproxima. Assim sendo, nesse caso, a resistência à compressão depende fortemente
da resistência ao cisalhamento da matriz. Com o passar dos anos, estudos mais recentes, em
meados dos anos 90, demonstraram o comportamento deste mecanismo como semelhante à
uma trinca através da teoria do alargamento de banda, que seria esperado visto que isto é
requerido para acomodar o aumento do deslocamento relativo através da banda com a
distância da frente, muito semelhante à abertura de trinca. Assim sendo, permitiu-se conduzir
análises de fratura bidimensionais adaptando o modelo de trinca coesiva para compressão e,
desta, estimar à energia de fratura associada pelos métodos mais tradicionais da mecânica da
fratura [9]. No entanto, deve haver cautela nestas estimativas, visto que muitas vezes este
mecanismo de falha vem acompanhado de delaminações, o que afeta diretamente a tenacidade
do material.
O comprimento da zona de fibras fraturadas da kink band (wkb) é um reflexo do suporte
fornecido pela matriz, onde matrizes com menores resistência irão gerar kink-bands de
comprimento de fibra maior e vice-versa. Os eixos neutros das fibras falhadas adjacentes
estão geralmente alinhados, o que demonstra o efeito dominó no processo de fratura ocorrido.
Para os casos onde o suporte fornecido pela matriz seja grande o suficiente, a
microflambagem das fibras não ira ocorrer e a falha será desenvolvida por cisalhamento, para
o qual geralmente a carga necessária é geralmente maior [10]. Um exemplo de kink-band
pode ser observado na Figura 4.

7
Figura 4 - a) Fotomicrografia de uma kink band b) Representação convencional de uma
kink band [6]
Geralmente, a iniciação das kink-bands ocorre em pontos de delaminação prévia, vazios,
extremidades ou entalhes, devido à diminuição do suporte lateral fornecido às fibras, que
podem flambar tanto no plano do laminado, como também em direções fora deste plano.
Assim sendo, pode-se dizer que existe embasamento teórico para dizer que os fatores
essenciais a este tipo de mecanismo são o desalinhamento das fibras, a resistência ao
cisalhamento da matriz (visto que ocorre deformação plástica por cisalhamento da mesma), o
diâmetro das fibras e a rigidez da matriz visto que ocorre deformação plástica por
cisalhamento da mesma.
Para este tipo de mecanismo, geralmente, é um pouco complicado para estimar tanto o
comprimento total do defeito assim como também sua a medida da taxa de liberação de
energia durante a propagação, o que torna os ensaios até a iniciação mais confiáveis [11]. Um
bom exemplo de metodologia aplicável para avaliar a tenacidade à fratura em materiais com
este mecanismo de falha é a Lei dos efeitos dos tamanhos [9].
2.3 Efeito da Taxa de Carregamento
Entendido o mecanismo que governa as falhas em compressão para este tipo de
material, é possível analisar os efeitos da taxa de carregamento para o mesmo, que pode obter
variação de acordo com a velocidade do carregamento imposta. Comparado às propriedades
dinâmicas de tensão, os estudos sobre o efeito da taxa de carregamento nas propriedades
compressivas receberam maior atenção dos pesquisadores. Isto ocorre visto que as respostas à

8
compressão longitudinal e transversal dependem fortemente do comportamento da matriz e,
também, devido à bem estabelecida metodologia de análise à compressão utilizando a barra
Hopkinson de pressão.
HSIAO et al. [12] utilizaram desta metodologia e, também, de testes em uma torre de
queda para realizar experimentos com alta taxa de carregamento compressivo em laminados
de fibra de carbono HEXCEL IM6G/3501-6, com valores de 120 s-1
para a torre de queda e
1800 s-1
para a barra Hopkinson. Conclui-se que não houve efeito da taxa de carregamento
para o valor do módulo de compressão longitudinal. Entretanto observou-se um aumento do
valor da tensão e, devido ao caráter linear da relação tensão-deformação, da deformação de
falha com o aumento da taxa de carregamento, como observado na Figura 5. Já para o caso de
compressão transversal, devido ao controle de processo predominantemente sendo da matriz,
observou-se aumento tanto no módulo como na tensão de falha com o aumento da taxa,
entretanto não houve aumento para a deformação máxima.
Figura 5 - Comportamento compressivo longitudinal para compósitos carbono/epóxi em
diferentes taxas de carregamento (adaptado de [12]).
Tais conclusões foram reforçadas por Bing et al. [13] , que na mesma linha realizaram
testes de compressão em diversas taxas desde quase estático até 700 s-1
, para blocos feitos de
compósito carbono-epóxi AS4/3501-6. Fazendo uso da barra Hopkinson de pressão e também
de uma presa hidráulica MTS, concluíram que a tensão de falha longitudinal cresce
linearmente com a taxa de carregamento, mas não observaram variação no módulo de
compressão. Um aumento na tensão de falha para solicitações em maiores taxas de
carregamento também foi observado por WIEGAND [14] tanto para a direção longitudinal

9
como para a transversal, quando este realizou ensaios mecânicos em laminados cross-ply de
fibra de carbono T700/MTM44 em taxas de até 1000s-1
.
Complementando, mais recentemente, KORBER [15], também realizando experimentos em
uma barra Hopkinson de Pressão, reforçou mais ainda os resultados já citados, encontrando
um aumento de até 40% na tensão compressiva de fratura longitudinal para casos com alta
taxa de carregamento, enquanto o módulo de compressão se manteve constante. Já para o caso
transversal, houve mudança deste módulo, observando também um aumento na tensão de
falha, porém com a deformação se mantendo constante, demonstrando aumento da
tenacidade. Tais resultados são exemplificados na Figura 6. Além disso, para o caso
transversal, tanto KORBER [15] quanto HSIAO et al. [12] observaram uma mudança de um
comportamento visco elástico para um comportamento mais elástico, o que pode ser
explicado pela governança das propriedades pelo polímero, que possui caracteristicamente
esta mudança de acordo com a taxa de deformação aplicada. Para os trabalhos citados nesta
seção, os valores de deformação de fratura estão dispostos na Tabela 1.
Figura 6 - Gráficos tensão x deformação obtidos por KORBER [15] para compósitos de fibra
de carbono em solicitação compressiva longitudinal e transversal (adaptado de [15]).

10
Tabela 1 – Valores de deformação compressiva de fratura para laminados de fibra de
carbono/epóxi encontradas em trabalhos da bibliografia
Referência Tipo de Corpo de Prova Deformação à fratura (%)
HSIAO et al. [12]
Unidirecional 0° Entre 0,6 (quase estático) e 1,15 (110 s-1
)
Cross-Ply [0°/90°]n Entre 0,8 (quase estático) e 1,3 (120 s-1
)
YOKOYAMA et al.
[16]
Unidirecional 0° 1,8 (Quase estático à 300 s-1
)
Unidirecional 90° 4,9 (Quase estático) e 3 (300 s-1
)
HOSUR et al. [17] Cross-ply [0°/90°]n 2,8 (82 s-1
) e 2,9 (163s-1
)
KORBER [15]
Unidirecional 0° 1 (250s-1
)
Unidirecional 90° 4 (250s-1
)
2.4 Fratura Dinâmica
Quando se fala em fratura dinâmica, pode-se dividi-la em duas classes principais:
I – Crescimento rápido de trinca em um carregamento quase estática
II – Iniciação e crescimento de trinca em alta taxa de carregamento
Para a mecânica da fratura dinâmica, devem ser considerados outros três fatores que não
são considerados na fratura linear elástica, elástica não-linear ou elasto-plástica: as reflexões
das ondas mecânicas, a inércia do material e os mecanismos do material que podem gerar
mudanças no comportamento para altas taxas de carregamento. Os efeitos da inércia são
importantes quando há mudança brusca no carregamento ou quando a trinca cresce rapidamente.
Nesses casos, uma fração do trabalho aplicado no corpo será convertida em energia cinética. Os
efeitos do carregamento rápido são ainda mais pronunciados em materiais susceptíveis à essa
variação, como materiais poliméricos. Dependendo da ocasião, do material utilizado e do teste

11
realizado, um ou dois desses fatores podem ser simplificados para ocasiões semelhantes aos
modos tradicionais de fratura (LMFE, MFEP) [18].
Em um carregamento sob alta taxa, a carga tende a aumentar com o tempo, porém sob certa
oscilação, conforme demonstrado na Figura 7. A frequência desta oscilação de carga depende das
propriedades do material e da geometria do corpo de prova. Com o incremento do tempo, e o
aumento da carga, a amplitude da oscilação decresce devido ao fato da energia cinética ser
dissipada pelo próprio material. Assim sendo, os efeitos de inércia são bastante significativos em
tempos curtos, porém passam a ser desprezíveis em tempos suficientemente longos, onde o
comportamento passa a ser quase estático [18].
Figura 7 - Comportamento da carga em relação ao tempo para um carregamento dinâmico
[19]
Assim sendo, parâmetros de fratura como o fator de intensidade de tensões, a integral-J, taxa
de liberação de energia G variam erraticamente no inicio do carregamento devido às oscilações
presentes. As ondas mecânicas se propagam pelo material, onde ocorrem interferências
construtivas e destrutivas devido às reflexões que ocorrem. Por isto, pode-se afirmar que os
parâmetros de fratura serão dependentes do tempo até que ocorra a estabilização das ondas
presentes no material, ou seja, até que ocorra o equilíbrio dinâmico. Já para os casos onde o
equilíbrio dinâmico é alcançado, os parâmetros de fratura dinâmica podem ser calculados por
meio das teorias de fratura para modo quase estático [20].

12
2.5 Tenacidade em Compressão
Com o aumento do uso dos materiais compósitos de fibra de carbono, cada vez mais
realizou-se testes visando estimar a tenacidade destes materiais na presença de esforços
compressivos, todavia, não há um teste normatizado para a avaliação da tenacidade neste tipo
de solicitação. Dentre os testes mais comuns para esta avaliação estão aqueles em exerce-se
forças compressivas em um corpo de prova do tipo CC (Compact Compression),
exemplificado na Figura 8.
Em 2006, PINHO et al. [21] realizaram medições de tenacidade à compressão em corpos
de prova de laminados unidirecionais 0° pré-impregnados de fibra de carbono T300/913 na
geometria citada ,em carregamento quase estático. Tal estudo observou a formação e
propagação das kink-bands e encontrou valores de energia de iniciação para este tipo de falha
em torno de 79,9 kJ/m². No mesmo trabalho, foi demonstrado que a zona relacionada à falha
em compressão é relativamente grande, diferentemente de falhas sob tensão. Assim sendo,
concluiu que os valores de energia de fratura para formação e propagação das kink-bands não
pode ser obtido diretamente de uma abordagem sobre o fator de intensidade de tensões
porque as tensões de contato nas faces da dobra não podem ser facilmente contabilizadas.
Assim sendo, é necessária uma abordagem local para avaliar a energia liberada para este tipo
de falha tornando técnicas como a correlação digital de imagem e a termografia
infravermelho como boas opções de trabalho.
Figura 8 - Modelo de corpo de prova compact compression utilizado por CATALANOTTI et
al. [22].

13
Para a mesma geometria de corpo de prova, porém para um material laminado pré-
impregnado unidirecional 0° IM7-8552, igual ao do presente trabalho, CATALANOTTI et
al. [22] utilizou-se da correlação digital de imagem e de simulações em elementos finitos
para o cálculo da tenacidade quase estática. Os valores encontrados, para o caso de iniciação
de defeito, foram de 80 kJ/m² para o método de imagem e 100 kJ/m² para o método de
elementos finitos. Além disto, o mesmo concluiu que este valor pode variar entre os ensaios
visto que depende do grau de delaminação que ocorre no material para cada ocasião. O
mesmo autor, em outro estudo em geometria de corpo de prova e condições de teste
semelhantes, porém para o mesmo material laminado na sequência (90/0)8s, calculou o valor
de tenacidade em compressão associado à direção longitudinal sendo de 47 kJ/m [23].
Em dois trabalhos, SOUTIS et al. [24] [25], desenvolveram métodos para a previsão da
tenacidade de falhas compressivas em compósitos, avaliando a questão da microflambagem
envolta por delaminações em casos de corpos de prova entalhados ou com buracos,
utilizando o modelo de trinca coesiva. Os testes obtiveram resultados condizentes com os
modelos apresentados, estimando valores de tenacidade entre 21 kJ/m² e 39 kJ/m² para
laminados de fibra de carbono T800/924C com epóxi em diversas sequências de
empilhamento e em carregamento quase-estático. Mais especificamente para laminados
cross-ply [(0/902/0)3] este valor foi de 39 kJ/m².
Os valores citados até o momento foram consideravelmente acima do valor de tenacidade
em torno de 25 kJ/m², encontrado por LAFFRAN et al. [26] para compósitos de fibra de
carbono IM7-8552 unidirecionais em corpos de prova de compressão com um único entalhe
submetidos a testes de flexão. O autor observou também que a tenacidade deveria ser
avaliada nos modos I e II de fratura, visto que a propagação dificilmente segue uma única
direção. O mesmo autor citou a dificuldade da medida da tenacidade após a iniciação e
também reforçou a importância da precisão na estimativa no momento da iniciação, o que
extremamente difícil de obter utilizando apenas curvas de tensão – deformação.
Por último, de forma complementar e utilizando uma técnica alternativa, LISLE et al.
[27] ,por meio de termografia infravermelho, avaliaram a tenacidade de laminados
[02/452/902/-452] submetidos à compressão após impacto. A técnica demonstrou boa
aplicabilidade e estimou valores de tenacidade entre 41 e 72 kJ/m², corroborando
parcialmente com o intervalo de valores apresentados até agora.

14
2.6 Mecânica dos Laminados
Para os materiais compósitos laminados, formados por empilhamento de camadas, que
constituem grande parte da demanda industrial de compósitos utilizada no mercado, utilizam-
se equações que regem a relação entre tensão e deformação. O conjunto destas equações
juntamente com um conjunto de considerações teóricas forma a teoria clássica dos laminados
planos (CLPT). Como geralmente estes materiais possuem dimensões de comprimento e
largura consideravelmente maior que a espessura, estes são tratados como se fosse um chapa.
Para tal modelo, são consideradas algumas premissas e restrições [28]:
- As camadas estão perfeitamente ligadas e juntas
- O material em cada camada é linear elástico e possui três planos de simetria
- Cada camada possui espessura uniforme
- Os deslocamentos e deformações são pequenos
- As tensões cisalhantes transversas nas faces de cima e de baixo do laminado são nulas.
Consideradas as informações citadas anteriormente, deve-se lembrar de que as três
componentes de deformações transversal (εzz , εxz , εyz) são nulas por definição. Para o caso
de laminados ortotrópicos, com camadas cujos eixos locais x1e x2 coincidem com x e y as
tensões cisalhantes (σxz e σyz) também são nulas. Uma vez que εzz = 0, a tensão normal σzz,
que embora não seja nula por definição, não aparece nas equações deste modelo,
consequentemente negligenciando a tensão normal e havendo teoricamente um estado plano
de tensões e deformações. Entretanto, para considerações práticas devido à pequenez da
espessura comparada às outras dimensões, geralmente considera-se o estado plano de tensões,
que segue, para cada camada, a seguinte relação:
[
𝜎𝑥𝑥𝜎𝑦𝑦𝜎𝑥𝑦
] = [
𝑄11 𝑄12 0𝑄21 𝑄22 00 0 𝑄66
] [
휀𝑥𝑥휀𝑦𝑦𝛾𝑥𝑦
]
Eq.1

15
onde Q é a matriz de rigidez reduzida para um compósito ortotrópico em estado plano de
tensões.
Na análise de laminados multicamadas, é geralmente necessário saber a relação tensão
deformação de uma forma geral nas coordenadas x e y, que diferem dos eixos principais das
camadas de um ângulo θ, que pode ser negativo ou positivo, conforme ilustrado na Figura 9.
Figura 9 - Representação do ângulo entre os eixos principais do material e as coordenadas
consideradas (adaptado de [1] )
Felizmente, as constantes elásticas nas relações de tensão deformação no referencial
xy estão relacionadas com os constantes elásticas nos eixos principais do material e o ângulo
θ, assim como também as tensões e deformações. Previamente, define-se uma matriz de
transformação T, conforme a Equação 6.
T= [𝑐2 𝑠2 2𝑐𝑠𝑠2 𝑐2 −2𝑐𝑠−𝑐𝑠 𝑐𝑠 𝑐2 − 𝑠2
]
Eq.6
, onde c=cos θ e s= sen θ.
{
𝑄11 = 𝐸𝑥 (1 − 𝜈2)⁄
𝑄22 = 𝐸𝑦 (1 − 𝜈2)⁄
𝑄12 = 𝑄21 = 𝐸𝑦𝜈 (1 − 𝜈2)⁄
Eq.2
Eq.3
Eq.4
Q33 = 𝐺𝑥𝑦 Eq.5

16
Assim sendo, define-se a relação tensão deformação transformada para o referencial
xy, para cada camada, da seguinte forma:
[
𝜎𝑥𝑥𝜎𝑦𝑦𝜎𝑥𝑦
]
𝑘
= T-1
Qk T [
휀𝑥𝑥휀𝑦𝑦𝛾𝑥𝑦
] = �̅�k [
휀𝑥𝑥휀𝑦𝑦 𝛾𝑥𝑦
]
Eq.7
Continuando, segue-se para a transformação dos valores de tensão e deformações
locais de cada camada para a relação destes com o valor de força por unidade de comprimento
atuante no laminado como um todo, que segue a seguinte relação:
[𝑁𝑀]= [
𝐴 𝐵𝐵 𝐷
] [휀0
𝜅] Eq.8
onde A é a matriz de rigidez global e relaciona as forças no plano (N) com as deformações no
plano médio do laminado 휀0 e D é a matriz de rigidez à flexão que relaciona o momento M
com as curvaturas κ. A matriz de acoplamento B relaciona as forças no plano N com as
curvaturas κ e os momentos M com as deformações no plano médio 휀0. Uma representação
dessas variáveis pode ser vista na Figura 10. As matrizes citadas são definidas da seguinte
forma:
Aij= ∑ (𝑄𝑖𝑗)̅̅ ̅̅ ̅𝑘
𝑁𝑘=1 (𝑧𝑘 − 𝑧𝑘−1) Eq.9
Bij=
1
2 ∑ (𝑄𝑖𝑗)̅̅ ̅̅ ̅
𝑘 𝑁𝑘=1 (𝑧²𝑘 − 𝑧²𝑘−1) Eq.10
Dij=
1
3 ∑ (𝑄𝑖𝑗)̅̅ ̅̅ ̅
𝑘 𝑁𝑘=1 (𝑧3𝑘 − 𝑧
3𝑘−1) Eq.11
Figura 10 - Representação das camadas de um laminado com seus respectivos índices

17
Para o caso de laminados simétricos ortotrópicos, todos os termos da matriz Bij são
nulos, mostrando que a relação tensão flexão nestes materiais é nula. Assim sendo,
desconsiderando-se o efeito de flexão, tem-se a seguinte relação para as forças atuantes no
material.
[
𝑁𝑥𝑁𝑦𝑁𝑥𝑦
] = [
𝐴11 𝐴12 𝐴16𝐴21 𝐴22 𝐴26𝐴16 𝐴26 𝐴66
] [
휀0𝑥𝑥휀0𝑦𝑦
ϒ0𝑥𝑦
] Eq.12
Para o caso onde se deseja saber as tensões globais atuantes no laminado divide-se a
força atuante por unidade de comprimento pela espessura do laminado, de forma a obter as
seguintes relações [1]:
[
𝜎𝑥𝑥𝜎𝑦𝑦𝜎𝑥𝑦
] = 1
𝑡 [
𝐴11 𝐴12 𝐴16𝐴21 𝐴22 𝐴26𝐴16 𝐴26 𝐴66
] [
휀0𝑥𝑥휀0𝑦𝑦
ϒ0𝑥𝑦
] Eq.13
2.7 Correlação Digital de Imagem
2.7.1 Classificação e Vantagens
Ao longo da história, diversos métodos foram propostos para a medição da
deformação de pequenas estruturas sujeitas a tensões (mecânicas ou térmicas), dos quais o
mais tradicional e consolidado é aquele que utiliza extensômetros físicos. No entanto este
método exige preparação de aparato extremamente minuciosa, devido à exigência de um bom
alinhamento e adesão à amostra, visando mitigar resultados defasados e inválidos. Além
disso, possui limitações para grandes deformações, exigindo métodos corretivos devido à
problemas de sensibilidade transversal das grelhas de medição e problemas de não-
linearidade, o que normalmente limita seu uso para deformações de até 5% [29].
Nesse contexto, visando desenvolver técnicas onde o contato do instrumento medidor
com a amostra não fosse necessário, uma gama de novas metodologias medidoras de
deformação foi proposta nos últimos anos, dentre as quais estão técnicas interferométricas,
que exigem uma fonte de luz coerente, e as medições são normalmente realizadas em uma

18
plataforma óptica isolada de vibrações, registrando a diferença de fase da onda de luz
espalhada a partir da superfície do objeto de teste antes e depois da deformação. Os resultados
da medição são frequentemente apresentados sob a forma de padrões de franjas, que deverão
serão processados juntamente com análise de fase. Dentre essas metodologias estão a
holografia, shearografia, fotoelasticidade, interferometria de Moiré. Já as técnicas não-
interferométricas; como métodos de grade e a correlação digital de imagem (DIC),
determinam a deformação superficial comparando as mudanças de intensidade de cinza da
superfície do objeto antes e depois da deformação e geralmente têm requisitos menos
rigorosos em condições experimentais. Assim sendo, as metodologias apresentadas,
permitem, com a ajuda de softwares e algoritmos processadores de dados, uma análise
quantitativa completa de todo o campo de deformações presente na superfície da amostra, o
que permite aplicação em materiais compósitos em diversos ramos como ensaios não-
destrutivos, percepção de heterogeneidades locais, identificação de parâmetros constitutivos e
propriedades, validação de modelos matemáticos, caracterização de trincas, verificação de
condições de contorno aplicadas em testes [30].
Dentre as técnicas apresentadas, a correlação digital de imagem, popularmente
conhecida como DIC (Digital Image Correlation) tem sido amplamente aceito e
rotineiramente usado como uma ferramenta poderosa, versátil e flexível para a medição da
deformação superficial no campo da mecânica de sólidos experimental, devido às seguintes
vantagens:
Não há necessidade de contato;
Deslocamento total e campo de deformação em vez de dados pontuais;
Medidas de deformação de 0,01 a 100%;
Não são necessárias correções, uma vez que a deformação verdadeira é
medida;
As imagens da câmera podem revelar os mecanismos de deformação e falha;
Preparação rápida das amostras;
Possibilidade de medição em 2D e 3D;
Dados podem ser usados para verificar simulações de elementos finitos;
O tamanho do objeto analisado pode variar de escala microscópica a grande
estrutura;
Dependendo do tipo de câmara digital, as medições podem ser efetuadas para
taxas de carregamento estáticas ou ultrarrápidas.

19
No entanto, a técnica também possui alguns contratempos pontuais como a
necessidade da superfície a ser analisada haver uma boa distribuição randômica da
intensidade de cinza, a total dependência da qualidade do sistema de captação de imagem e a
acurácia menor que as técnicas interferométricas, não sendo recomendado para medição de
pequenas deformações não homogêneas [31].
2.7.2 Evolução da Técnica
A correlação de imagem digital é uma técnica de medição óptico-numérica, que
oferece a possibilidade de determinar campos complexos de forma, deslocamento e
deformação na superfície de objetos sob qualquer tipo de carregamento. A mesma foi
introduzida por SUTTON et al. [32] no inicio dos anos 80 e passou por diversas melhorias ao
longo dos anos com o desenvolvimento de novos instrumentos de medição, métodos
computacionais, softwares e equipamentos que permitiram melhor resolução, acurácia,
velocidade e eficiência. [33,34]. Dentre melhorias e evoluções consideráveis desta técnica,
podemos citar a utilização de diversas câmeras, possibilitando a análise de campos de
deslocamento tridimensionais e, assim, uma análise mais completa de informações, como
observado por (colocar referências que usam DIC 3D), onde houve o benefício adicional de
eliminar gradientes de deslocamento e erros associados no plano de imagem, comumente
experimentados com abordagens 2D [35]. Paralelamente, também desenvolveu-se a
combinação desta técnica com outras, como por exemplo, termografia infravermelha e
tomografia de raios-X também mostrando excelente desempenho para investigar danos de
iniciação e propagação em carbono-epóxi tecidos laminados [36].
De forma a aprimorar também seu uso, com o desenvolvimento de câmeras
ultrarrápidas, permitindo um grande número de frames captados por segundo, também foi
possível a análise de imagens para amostras em carregamento dinâmico, com alta taxa de
deformação, o que se aproxima do escopo do presente trabalho. KIRUGULIGE et al. [37]
utilizou-se da DIC com uma câmera ultrarrápida em um sistema de espelhos rotatórios para
medir a deformação transiente e o crescimento de trincas em amostras de resina epóxi sob
flexão de três pontos em impacto. RIZZUTO et al. [38] caracterizaram um sistema DIC
dinâmico para avaliação de deformações em tecidos biológicos baseados na associação com
estereomicroscopia. GAO et al. [39] avaliaram a sensibilidade da tenacidade e da propagação
de defeitos em relação à taxa de carregamento dinâmico para rochas de granita utilizando-se

20
de um sistema de barra Hopkinson de pressão em compressão, de forma semelhante à análise
feita por GILAT et al. [40] para o campo de deformações dinâmico em amostras cilíndricas
de cobre , consolidando a informação de versatilidade deste tipo de técnica para diversos
materiais. Assim sendo, esta técnica se difundiu cada vez mais no meio acadêmico, se
tornando cada vez mais abrangente e popular contando com, atualmente, mais de 540
trabalhos acadêmicos com a expressão “digital image correlation”, em seu titulo, publicado
nas principais revistas internacionais.
2.7.3 Aplicação em Materiais Compósitos
Dentre os principais tipos de materiais para os quais esta técnica é utilizada estão os
materiais compósitos, os quais tem sofrido grande aumento na demanda de produção e
aplicação nos últimos anos, possuindo atualmente mais de 50 trabalhos acadêmicos com as
citações “digital image correlation” e “composites” no mesmo título. Sua importância é
reforçada ainda mais pelo fato da extração e a interpretação dos parâmetros de campo
próximos à defeitos em laminados compósitos exigem considerações especiais sobre
heterogeneidade do material e anisotropia elástica deste, tornando a medida local ainda mais
útil. Dentre estes, a técnica é aplicada para diversos objetivos, que são listados a seguir:
- A avaliação das propriedades de expansão térmica, essenciais para a aplicação de
compósitos em locais com temperaturas mais elevadas [41] [42]
- Avaliações detalhadas in-situ do mecanismo e crescimento de falha [43] [44] [45] [46],
permitindo diferenciar mecanismos globais e locais, delaminação, falhas intracamadas,
zonas de decoesão entre fibra e matriz.
- Avaliar de forma mais eficiente a evolução das falhas em fadiga, que são extremamente
comuns em compósitos, frequentemente expostos a tensões cíclicas [47].
- Transformações dimensionais devido a processos de cura e pós-cura da matriz
polimérica [48].
- Confirmar as medidas obtidas com outras técnicas mais clássicas para haver maior
confiabilidade dos resultados. [49]
- Validar as previsões das simulações em elementos finitos, que são extremamente
utilizadas em compósitos. [22]

21
- Construções de curvas tensão x deformação, normal e cisalhante [50].
- Cálculo de diversas propriedades de fratura, como o fator de intensidade de tensões
[51], tenacidade; seja por Integral-J, CTOD ou CMOD, tensões de falha, deformação de
fratura; em diversos tipos de carregamento, levando em conta fatores relacionados à
direcionalidade e tamanho das fibras [52] [53] [54].
- Cálculo de propriedades mecânicas extremamente importantes como módulo de
elasticidade e coeficiente de Poisson, também relacionando à anisotropia do material e as
condições de ambas as fases [55].
Assim sendo, sua utilização permite que diversas estruturas, em diferentes formatos e
tamanhos, e sob as mais diversas formas de carregamento, que vem sendo ultimamente cada
vez, mas confeccionadas com compósitos tenham suas propriedades mecânicas e de falha
avaliadas com menor esforço. Um ótimo exemplo é o caso dos tubos compósitos feitos por
enrolamento filamentar e muito utilizados na indústria offshore, que sofrem grandes
solicitações de pressões hidrostáticas interna e externa, nos quais alguns estudos com esta
técnica já começaram a ser implementados [56]. Na Figura 11 podem ser vistos os resultados
desse estudo. No mesmo contexto, outra estrutura com uso bastante promissor de compósitos,
o vaso de pressão, também teve seu mapa de deformações construído com sucesso através da
correlação digital de imagem quando YAO et al. [57] realizaram ensaios de pressão interna
em vasos feitos de fibra de carbono com epóxi, obtendo resultados muito satisfatórios.
É muito importante notar, também, que pelo fato da técnica abordada permitir a
avaliação local do campo de deformações, e que pelo fato de materiais compósitos serem
construídos pela junção de duas ou mais fases, esta permite que a avaliação das propriedades
interfaciais sejam medidas com maior precisão, principalmente no caso da transferência de
carga [58] e deformações heterogêneas até em micro escala. Esta abordagem foi bem
contextualizada em alguns trabalhos recentes, como por exemplo, em 2012 e, posteriormente,
em 2016 e , quando dois minuciosos trabalhos [59] [60] analisaram as deformações interfibras
em compósitos unidirecionais de fibra de vidro, com aplicação de manchas em micro escala
de acordo com o tipo de carregamento, permitindo também a validação de estudos prévios
realizados dor elementos finitos, conforme demonstrado na Erro! Fonte de referência não
encontrada..

22
Figura 11 - Utilização do DIC 3D para avaliação de campos de deformação em tubos de
compósito [56]
Figura 12 - Mapa de deformação em micro-escala gerado por DIC para analisar
esforços interfibras [60].
Outro ótimo exemplo esta na análise de deformações heterogêneas, em mesoescala,
geradas pela adição de micro aditivos à matriz [61] e também na avaliação deformação nas
extremidades de fibras curtas utilizadas de acordo com carregamento, posição e direção [46],
coisas que para métodos globais de medição não seriam possíveis. Na mesma linha, esta
metodologia também se tornou bastante atrativa para a avaliação de propriedades também
para materiais híbridos, que são muito utilizados na indústria aeroespacial, permitindo avaliar
de forma eficiente a concentração das deformações e falhas em cada componente, como
realizado em [62] e [54].

23
2.7.4 Cálculo de Parâmetros de Fratura
Com o desenvolvimento da correlação digital de imagem e a geração de campos que
representam o deslocamento e deformação de forma local ao longo de toda a superfície da
amostra, esta se tornou também uma excelente alternativa para o cálculo de tenacidade à
fratura dos materiais. A utilização da técnica para o cálculo destes parâmetros permite-se
desde a geração de gráficos de tensão x deformação, o cálculo de CTOD [63] e CMOD [64]
devido à precisão da medida da abertura de trinca e da deformação próximo à esta, permitindo
comparar estes valores com a carga presente, cálculo preciso de fatores de intensidade de
tensões para diversos tipos de entalhe [65], até seu uso para o cálculo de Integral J. É sempre
importante lembrar que a esta técnica analisa apenas os deslocamentos presentes na
superfície, onde está aplicado o padrão de manchas e, com isso, é de suma importância
assumir que o material está em estado plano de tensões para garantir resultados confiáveis.
Além disso, devido ao caráter discreto dos dados da imagem, a integral-J torna-se uma soma
discreta dos seus fatores correspondentes em cada ponto de dados, ao longo do contorno de
integração, o que faz com que classicamente muitos dos contornos utilizados sejam
retangulares devido à disposição dos pixels, conforme demonstrado na Figura 13. Este
parâmetro de fratura oferece a comodidade de não necessitar da informação exata do local da
ponta de defeitos, que se torna muito difícil principalmente em materiais compósitos frágeis,
onde ocorrem microtrincas ao longo da falha. Assim sendo diversos trabalhos vem sendo
desenvolvidos sobre sua utilização e otimização.
Figura 13 - Representação esquemática da discretização da Integral-J para dados gerados por
correlação digital de imagem.

24
JIANG et al. [66] calcularam, através dos campos de deformação gerados pela
correlação digital de imagem, o valor da integral-J, em carregamento quase-estáticos, para
materiais compósitos utilizados em restaurações dentárias, utilizando-se teste de flexão em
três pontos. O estudo analisou a influência dos caminhos aplicados para este cálculo, variando
seu tamanho, formato e localização e, também calculou o fator de intensidade de tensões
crítico de acordo com o valor obtido, comparando-o com a literatura. Os caminhos estão
exemplificados na Figura 14. Foi observado que a técnica é uma ótima ferramenta para o
cálculo de J, porém observou-se uma considerável dependência deste valor em relação ao
tamanho do caminho de integração e também com a localização deste, com valores médios de
J menores para caminhos que passem por locais mais distantes do entalhe, sendo válida
também para caminhos maiores, onde boa parte deste está distante do defeito. Isto pode
ocorrer devido as maiores concentrações de tensões próximo ao entalhe, que podem gerar
descontinuidades e ruídos, o que dificulta a suavização dos dados e pode gerar valores
destoantes que modificam o valor total da integral. Os valores dos fatores de intensidade de
tensões críticos calculados estão de acordo com a literatura, porém com algumas flutuações
relacionadas ao módulo de Young, Poisson e também à limitação da precisão de medida desta
técnica.
Figura 14 - Caminhos utilizados por JIANG et al. [66] para o cálculo da integral-J, variando
em tamanho (a) e em localização (b).
O cálculo da integral-J com campos de deslocamento elásticos em torno de um defeito
também permite estimar o valor dos fatores de intensidade de tensões presentes, assim como
foi feito recentemente por GONZALES et al. [51], para casos de carregamento cíclico em
tensão e considerando os efeitos de fechamento de trinca. Após realizar o cálculo de J para

25
caminhos de integração simétricos e assimétricos, constatando diferença ínfima dentre os
valores obtidos e obtendo valores do fator de intensidade de tensões em completo acordo para
o método de integral-J via DIC e a metodologia ASTM, reforçando a validade do método e da
utilização da formulação da fratura linear elástica para este. De forma a também reforçar a
validade deste método, ALLAER et al. [67] compararam os cálculos de J gerados por
correlação digital de imagem e aqueles realizados por simulação numérica para corpos de
prova unientalhados de resina epóxi em flexão, encontrando uma diferença em torno de 3%,
reforçando ainda mais a aplicabilidade da técnica. Esta comparação é exemplificada na Figura
15.
Figura 15 - Comparação dos valores de deformação para o DIC e para simulação numérica
[67].
Em um estudo ainda mais completo [68], utilizou-se de integrais conservativas, no
caso a integral-J e a integral-M para analisar parâmetros de fratura próximos ao defeito para
casos de fratura translaminar em materiais compósitos laminados. A localização da ponta da
trinca, que permite estimar o tamanho da mesma, pôde ser calculada pela razão entre o valor
encontrado na integral-M e o valor encontrado na integral-J. Paralelamente, os valores da
integral-J também foram calculados para diversos tamanhos de caminho observando uma
diferença bem pequena entre estes, porém com valores consideravelmente diferentes para a
situação antes e depois da correção do erro de deslocamentos fora do plano, conforme
observado na Figura 16. Com a utilização da integral-J para cálculo da energia dissipada e
também para cálculo do comprimento de trinca, utilizou-se de mecânica da fratura linear
elástica para a construção de curvas-R para este material, feita com sucesso e com resultados
bem próximos à outras metodologias.

26
Figura 16 - Comparação dos valores de integral-J calculados para diferentes aberturas
de trinca, tamanhos de caminho e presença de rotações fora do plano (adaptado de [68]).
De forma diferenciada, BECKER et al. [69] combinaram um modelo numérico-
experimental para calcular a integral-J como uma integral de área, proposta por LI et al. [70],
através da correlação digital de imagem, levando em conta toda a superfície interna ao
contorno previamente considerado. Através do estudo de corpos de prova de três geometrias
diferentes para materiais com diferentes propriedades elasto-plásticas demonstrou-se que este
modelo possui bastante concordância com outras metodologias, possuindo aplicação com
erros bem pequenos para todas as geometrias e materiais. Com o cálculo do erro de Monte-
Carlo, pode-se observar também que para a modelagem da integral por área não houve
diferenças representativas para os valores obtidos para diferentes contornos, e
consequentemente, áreas de integração, o que demonstra a capacidade de aplicação deste
modelo em uma gama ampla de situações e materiais.
Em desenvolvimento mais recente, CATALANOTTI et al. [22] utilizaram a técnica de
DIC para calcular o local de ponta da trinca para carregamentos em tensão e compressão
quase-estáticos em corpo de fibra de carbono. Este dado, juntamente com o valor da
tenacidade fornecido pelo cálculo da integral-J utilizando os dados da mesma correlação
digital de imagem permitiram a construção, com sucesso, de uma curva-R, que corroborou os
resultados obtidos por elementos finitos. De forma conseguinte, no mesmo grupo de pesquisa,
o mesmo autor também utilizou esta mesma técnica para cálculo da integral J para corpos de

27
diferentes tamanhos em compressão [23] e em cisalhamento [53], utilizando da lei dos efeitos
dos tamanhos para construção da curva-R.
A aplicação desta técnica também favorece muito o estudo de parâmetros de fratura
em materiais mais dúcteis, que possuem análises de mecânica da fratura diferentes dos mais
tradicionais, e principalmente no caso da presença de concentradores de tensão, devido ao
cálculo direto do parâmetro de acordo com dados de campo. Em 2014, VRAVRIK et al. [71]
utilizaram a técnica para cálculo da Integral-J visando avaliar a dissipação de energia para a
fratura em tensão de corpos unientalhados de ligas de alumínio. Embora o padrão de medida
sugira, nesses casos, contornos de integração mais distantes do defeito para evitar influência
de empescoçamento e de mudanças no estado plano de tensões, tal estudo demonstrou que
mesmo para ocasiões de contornos com alguma deformação plástica, não houve variação
significativa dos resultados para diferentes tamanhos de contorno, apenas alguma diferença
para o valor calculado pelo CTOD para maiores deformações, exigindo cautela para a
utilização da técnica, como demonstrado na Figura 17. Tais constatações foram reforçadas por
um estudo recente, de 2017 [72], fazendo uso de um método de filtragem de dados, para
calcular a integral J em 3 caminhos com tamanhos diferentes e comparando os resultados
gerados com método dos elementos finitos e por CTOD, obtendo resultados muito próximo e
consistentes, como mostrado na Figura 18.
Figura 17 - Variação dos valores calculados de J para diferentes caminhos, e também
comparado com a técnica do CTOD (adaptado de [71]).

28
Figura 18 - Comparação da medida da integral J pelo método DIC (azul) com outras
metodologias (adaptado de [72]).
Por último, SCHEIDER et al. [73] realizaram estudos calculando a integral-J para
materiais elastoplásticos por elementos finitos utilizando-se também do método da integral de
domínio, realizando este cálculo para pequenas e grandes deformações e para diversos
contornos. O mesmo conclui que a influência dos contornos esta associada diretamente ao
grau de refinamento da malha e também ao grau de deformação existente, sendo a diferença
considerável para grandes deformações, todavia praticamente nula para pequenas
deformações. Este trabalho também concluiu que contornos muito próximos à trinca podem
gerar resultados defasados devido ao maior gradiente de tensões presente no local,
recomendando a escolha de um contorno relativamente longe da ponta trinca, porém não
muito próximo à extremidade do corpo de prova, onde também foi observado um resultado
defasado, conforme demonstrado na Figura 19.

29
Figura 19 - Curva de integral-J em relação ao deslocamento para diferentes contornos em
pequenas deformações e grandes deformações (adaptado de [73]).
2.8 Funcionamento da Técnica
2.8.1 Leitura dos Dados
O presente método funciona baseado na comparação entre imagens dos corpos de
prova antes, durante e depois da deformação imposta, tipicamente adquirida por um sistema
CCD de câmeras monocromáticos. Para isto, os corpos de prova têm suas superfícies
preenchidas por uma rede estocástica de manchas em diferentes escalas de cinza.
O corpo de prova deve ser devidamente preparado para o ensaio caso não possua
textura natural com uma distribuição adequada de intensidades de cinza, o que é um requisito
para a técnica. Aerosóis, sprays e rolos são geralmente utilizados para gerar o padrão
randômico de manchas. O tamanho desejado das manchas deve ser escolhido de acordo com a
resolução da câmera, o tamanho do corpo de prova e a resolução desejada [15].
Nesse contexto, a essência do funcionamento da técnica está em realizar medições que
permitam que sejam feitas comparações matemáticas das mudanças locais de intensidade de
cinza das imagens adquiridas em momentos antes e após a deformação. Assim sendo, durante
a história de deformação do corpo de prova, são capturadas diversas imagens de acordo com a
capacidade de captação da câmera. Estas, por sua vez, são armazenadas para que possam ser
posteriormente analisadas por um software de correlação digital de imagem.

30
Para a realização da medida, seleciona-se uma região de interesse onde serão
analisadas as modificações. Esta mesma região, é dividida em uma rede de pequenos pedaços,
contendo um número limitado de pixels, que são tradicionalmente denominados subconjuntos.
Desta forma, utiliza-se de algoritmos de correlação para obter os deslocamentos através da
identificação de áreas de correspondência de valores de escala de cinza da rede de manchas
em cada subconjunto. A posição onde a função de correlação, geralmente calculado por um
software, atinge seu máximo corresponde ao movimento da rede durante a deformação. Os
subconjuntos são usados porque um subconjunto de pixels contém uma gama mais ampla de
níveis de escala de cinza, que se distingue de outros subconjuntos e assim pode, portanto, ser
identificada de maneira exclusiva no estado deformado. A diferença entre a posição do centro
de subconjunto de referência e o centro de subconjunto deformado define o vetor de
deslocamento para a o pixel respectivo, conforme demonstrado na Figura 20. Tal correlação
ocorre com êxito visto que os pontos vizinhos na imagem de referência são considerados
como os pontos vizinhos mesmo após a deformação ter ocorrido.
Figura 20 - Representação do cálculo do vetor deslocamento utilizando a correlação digital de
imagem (adaptado de [15])
2.8.2 Critérios de Correlação
Tecnicamente, durante o processo de correlação de imagem, são aplicados diversos
critérios matemáticos de correspondência para avaliar a semelhança entre os subconjuntos
antes e após a deformação, dentro os quais os mais conhecidos são o Critério de Correlação

31
Cruzada, o Critério de Diferenças Absolutas e o Critério de Diferença das Somas Quadráticas,
que utilizam de algoritmos matemáticos que relacionam posição e tom de cinza para avaliar o
deslocamento presente. Os algoritmos dos critérios presentes localizam um subconjunto
correspondente nas imagens deformadas, de acordo com o valor do coeficiente de correlação,
que deve ser maximizado, determinando então os parâmetros de deslocamento do corpo de
prova e, consequentemente, os campos de deslocamento destes. Com o uso dos critérios
citados, a semelhança entre os subconjuntos é significativamente reduzida, juntamente com a
precisão dos resultados obtidos. Visando aprimorar mais ainda a mediada através da técnica,
aprimorou-se de forma continua os critérios utilizados, inserindo algoritmos que também
compensem variações de iluminação, que são amplamente discutidos em [31,34]. Além disso,
nos últimos anos diversos outras evoluções importantes na acurácia e aplicabilidade desses
critérios foram desenvolvidas, o que aumentou a abrangência de uso e também a mitigação de
erros, conforme cita o estudo de WHEI KOO et al. [74].
Para determinar o deslocamento médio no plano da amostra, funções de mapeamento
ou as funções de forma são usadas para localizar um subconjunto inicialmente quadrado na
imagem de referência dentro da próxima imagem capturada em condições de carregamento.
Para a tradução rígida do corpo, recomenda-se o uso de funções de forma de ordem 1 ou
maiores. Uma revisão mais detalhada sobre os critérios de correlação utilizados e sua
importância é apresentado por PAN et al. [49].
Uma explicação detalhada sobre o critério de correlação utilizado pelo software
NCORR e os parâmetros utilizados é encontrado em [75].
2.8.3 Padrão de Manchas
Como citado anteriormente, para permitir a correlação, aplica-se um padrão
estocástico de manchas à superfície da amostra para fornecer variações aleatórias de nível de
cinza, que são conhecidas como redes de reconhecimentos. Formalmente, estas são definidas
como o conjunto de partículas em escala de cinza depositada sobre a superfície do corpo, e
que se deforma juntamente com este, para que o aparato eletrônico possa reconhecer os
deslocamentos presentes.
Para a aplicação deste conjunto de partículas sobre a superfície das amostras são
utilizadas tradicionalmente diversas técnicas, tais como pintura por pulverização, aerógrafo,

32
adesivo, impressão na superfície também por utilização de rolos de pintura, onde as partículas
são misturadas homogeneamente na tinta a ser aplicada. É de extrema importância que a tinta
não afete quimicamente a amostra, não gere endureça a mesma, possua aderência excelente à
superfície seguindo plenamente a deformação e que seja plana, sem brilho [76]. Em relação
aos parâmetros de aplicação de manchas, GIACOMO et al. [77] realizaram um estudo
bastante conclusivo relacionando estes parâmetros e métodos de aplicação com a rede de
manchas gerada e a qualidade da medição realizada. Foi demonstrado que uma mudança de
uma tinta spray para um aerógrafo tem um grande efeito benéfico no erro geral de medição,
como observado na Figura 21. Isto é suportado por simulações de deformações de padrões e
validação experimental contra leituras de strain gage, que proporcionam excelente
concordância com os resultados previstos da avaliação morfológica. CRAMMOND et al. [78]
também realizaram estudos comparativos entre metodologias de aplicação, spray e aerógrafo,
concluindo que esta segunda leva a análises com maior precisão. BARRANGER et al. [79]
concluíram que para deformações de até 10%, o tipo de aplicação praticamente não interfere
na medição da deformação.
Figura 21- Estudo comparativo de precisão de medição de deformação de dois métodos de
aplicação das manchas (adaptado de [78]).

33
Portanto, a correlação digital de imagem exige que o corpo de prova seja preparado
com um padrão de manchas de alto contraste. A qualidade do padrão afeta fortemente a
resolução e a precisão das medidas feitas pelo método, e assim sendo [77], o padrão deve
possuir as seguintes características:
• As manchas devem ter um bom contraste com o plano de fundo para reduzir o nível
de ruído nas imagens coletadas.
• O tamanho mínimo da mancha deve ser 4 pixels para superar as características em
cada padrão. Manchas menores do que isto não são devidamente detectadas e resultam em
uma imagem cinza, em oposição ao padrão de alto contraste desejado.
• As manchas devem ter variabilidade limitada em termos de tamanho, porque nas
áreas com manchas menores, pequenos tamanhos de subconjuntos podem produzir
deslocamentos precisos, enquanto que nas áreas com grandes manchas são necessários
subconjuntos maiores. Além disto, as manchas menores causam um contraste mais fraco,
enquanto as maiores podem causa diminuição da resolução espacial, sendo desejável um
equilíbrio.
Estas partículas podem possuir diversas morfologias como pontos, linhas, malhas e
redes aleatórias, mas sempre respeitando o comportamento isotrópico, sem haver uma
orientação preferencial e caráter repetitivo, o que levaria a problemas no reconhecimento dos
deslocamentos. Assim sendo, é desejável haver uma rede com altos níveis de características
únicas e aleatoriedade para maximizar a resposta da função de correlação quando uma
correspondência é encontrada em cada célula de interrogação reduzindo a incerteza de
combinação. Além disso, a aleatoriedade irá garantir que as correlações não sejam perdidas
mesmo em grandes deformações e permite a divisão da imagem em subzonas únicas [34]. A
qualidade das medidas de deformação por correlação de imagem digital depende fortemente
da qualidade do padrão na superfície da amostra. Um padrão ideal deve ser altamente
contrastado, estocástico e isotrópico. Assim sendo, as redes exemplificadas na Figura 22
seriam recomendadas devido às condições de não periodicidade citadas.

34
Figura 22 - Exemplos de redes apropriadas para correlação [74]
As ideias apresentadas foram corroboradas por HADDADI et al. [80], que testou 5
tipos diferentes de padrão de manchas visando analisar o erro associado à cada tipo, e
demonstrou que os valores obtidos podem diferir consideravelmente, podendo em alguns
casos até tornar a correlação impossível, deixando o mapa incompleto. O mesmo identificou
que identificou que os padrões com mais manchas e mais aleatoriedade apresentaram melhor
desempenho em comparação com padrões maiores em testes de movimento do corpo.
Manchas pequenas são registradas em apenas um pequeno número de pixels no sensor
da câmera, aumentando a semelhança na forma e tamanho de manchas no padrão, o que reduz
a singularidade do padrão. Além disso, devido ao ruído da câmera e às flutuações do nível de
cinza, estes podem produzir grandes variações na identificação de seu tamanho, forma e
posição em relação às suas características originais, o que prejudica a precisão da medição.
Aumentar o tamanho de mancha diminui a aleatoriedade da posição da rede, pois estes
ocupam mais espaço na célula de interrogação finita, porém, as partículas maiores têm um
maior número de permutações de formas, criando mais manchas individuais unicamente
definidos dentro do padrão. Grandes manchas também se registram em mais pixels, portanto,
há menos flutuações relativas e incerteza na forma e tamanho da mancha resultante do ruído
da câmera. Entretanto, manchas maiores também exigem um maior tamanho de subconjunto o
que também melhora a solução do problema de correlação, isto é, o grau de similaridade na
distribuição do nível de cinza no subconjunto alvo de uma sequência de imagens.
Infelizmente, o aumento do tamanho do subconjunto também diminui a resolução espacial e a
precisão na medição de deslocamentos altos ou gradientes de deformação, como será
detalhado mais a frente. Por este motivo, as manchas não devem ser desnecessariamente
grandes, para evitar a perda de resolução espacial [78]. Portanto, a relação entre tamanho,
forma e densidade influencia fortemente o grau de singularidade das manchas, sendo um fator

35
extremamente importante e que é muitas vezes negligenciado ao avaliar a qualidade do padrão
de manchas [78].
2.8.4 Caracterização das Manchas
Para estudar a influência dos padrões de manchas na precisão da medição do
deslocamento, bem como para avaliar a qualidade dos mesmos, foram propostas diversas
metodologias, incluindo parâmetros locais e parâmetros globais. Em 2010, PAN et al. [81]
propuseram o método do Gradiente Médio de Intensidade para avaliar a qualidade da rede de
manchas gerada, utilizando um determinado operador de gradiente, que normalmente é usado
no processamento de imagem digital para detecção de borda. A eficácia do novo parâmetro
local é demonstrada por experimentos numéricos usando cinco padrões diferentes e
demonstrando que o erro do deslocamento medido esta intimamente relacionada com a
grandeza proposta estudada e que o padrão ideal deve ser de grande gradiente de intensidade
média. A limitação desta é que ele não fornece uma indicação da aleatoriedade e da
singularidade do padrão localmente, de subconjunto para o subconjunto. O mesmo autor
propôs outra metodologia denominada Soma dos quadrados dos gradientes de intensidade dos
subconjuntos [82], porém este se limita com a suposição de que o gradiente de intensidade
cinzenta da imagem é muito maior do que o ruído da imagem. PANG et al. [10] analisaram a
qualidade do padrão introduzindo um conceito de entropia de subconjuntos, baseado a soma
da diferença absoluta de tonalidade dos pixels vizinhos. No entanto, tal teoria baseia-se
apenas numa ideia intuitiva, havendo ausência de suporte matemático. Em 2011, TAO et al.
[83] propuseram o método da flutuação média de subconjunto, baseado na comparação da
tonalidade de pixels e da média do subconjunto ao qual estão inseridos, porém esbarrando no
problema de influência do tamanho das manchas. Os métodos citados fornecem medidas
globais a partir de critérios locais e podem não são considerados adequados, pois o padrão de
manchas é estocástico na região de interesse e não representativo da qualidade do padrão, pois
não há indicação da variação de qualidade em toda a imagem. Isso é importante porque os
valores podem ser significativamente tendenciosos por áreas com valores de gradiente
anormalmente altos ou de baixa intensidade.
Por outro lado, outra vertente de metodologias esta atrelado às abordagens
morfológicas, que foram usadas para aplicar a análise local da qualidade do padrão com base
nas propriedades visuais dos mesmos, como o tamanho e frequência dos pontos dentro do

36
padrão. Esta metodologia foi aplicada por LECOMPTE et al., em 2006 em dois estudos
realizados pelo mesmo [84] [85]. Normalmente, isto é realizado usando uma técnica de limiar
de imagem, convertendo todos os pixels com níveis de cinza acima / abaixo de um
determinado valor de limiar em valores preto e branco para formar uma imagem binária do
padrão. O método de limiar é uma solução rápida e prática, porém deve ser aplicado com
extremo cuidado pois a escolha do limiar escolhido pode alterar significativamente a
distribuição morfológica das manchas [86]. A análise morfológica das manchas engloba a
distribuição de tamanhos deste, que é expressa como uma porcentagem cumulativa do número
total de manchas no padrão, identificando a distribuição de frequência de tamanho de
manchas presentes na rede. A aplicação desta técnica fornece uma detalhada avaliação
comparativa das diferenças físicas entre padrões de manchas. Um exemplo de gráfico gerado
para este tipo de análise é retratado na Figura 23.
Figura 23 - Gráfico do percentual acumulativo dos tamanhos de Manchas, em pixels,
para diferentes resoluções (adaptado de [78]).
Em 2013, CRAMMOND et al. [60] também apresentaram estudo sobre a influência do
tamanho e densidade das manchas na precisão das medidas adquiridas em diferentes
resoluções. Tal trabalho conclui que há uma relação clara entre o erro de medida e
uniformidade do padrão de manchas em relação aos seus tamanhos e formatos. Os erros foram

37
reduzidos com o aumento da uniformidade, aumento do número e do tamanho de manchas,
providenciando uma maior variação de formato. A relação dos erros de acordo com o número
de manchas por subconjunto e os seus tamanhos demonstrou-se para maiores deformações,
conforme demonstrado na Figura 24.
Figura 24 - Relação do desvio padrão da medida da deformação de acordo com o tamanho das
manchas e sua quantidade por subconjunto [78].
Em seus trabalhos, LECOMPTE et al. [84] [85] também estudaram a otimização de
uma rede de manchas, que existe uma relação direta entre a área de cobertura das manchas, a
distribuição de tamanho deste e os erros de medida obtidos, dependendo dos parâmetros de
análise selecionados e também do tipo de deformação imposta. A cobertura ótima encontrada
foi entre 25 e 70%. Por outro lado, CARTER et al. [87] concluiu que independente dos
parâmetros escolhidos, a área de cobertura ótima para redução dos erros esta entre 25% e
50%. O mesmo trabalho constatou que houve diminuição na resolução espacial quando o
espaçamento entre as manchas esta na mesma ordem do tamanho do subconjunto [87].
ZHIYONG et al. [88] analisaram o tamanho ótimo das manchas a serem utilizados
através da medida dos erros randômicos e sistemáticos de simulações numéricas, concluindo
que manchas pequenas mitigam o erro randômico e manchas maiores mitigam o erro
sistemático, concluindo que tamanhos médios gerem um equilíbrio do erro total .Ao usar a
óptica de ampliação, a forma, o tamanho e a distribuição observados do padrão de manchas
aplicado são muito diferentes, para menores imagens de ampliação. Isso resulta em
propriedades significativamente diferentes para o algoritmo de correlação para rastrear. Para

38
alcançar a confiança na reprodutibilidade das medidas, é muito importante garantir que o
padrão seja adequado para a óptica em termos de tamanho e forma das manchas.
Assim sendo, existem diversos estudos sobre os padrões de manchas gerando uma
série de diferentes parâmetros de medição da qualidade dos mesmos. Esses parâmetros não
fornecem a definição de um padrão perfeito para ser usado, pois não há controle suficiente na
aplicação do padrão de manchas ou métodos de imagem para obter consistentemente a mesma
qualidade de padrão de usuário para usuário. A grande dificuldade vem no momento da
aplicação, geralmente feitos em laboratório e à mão, onde há muito menos controle sobre o
tamanho, forma e distribuição do padrão que está sendo aplicado.
2.8.5 Aparato Experimental
Para esta técnica, é essencial uma organização minuciosa do aparato experimental,
englobando o corpo de prova, as fontes de luz e a câmera, visto que a acurácia e consistência
da medição depende diretamente da qualidade deste. E de extrema importância que a
superfície a ser analisada do corpo de prova seja alocada em direção perpendicular ao eixo
óptico da câmera visando mitigar os deslocamentos fora do plano, conforme demonstrado na
Figura 25.
Figura 25 - Aparato experimental para captação das imagens.
Sob altos níveis de ampliação, a aparência dos padrões muda significativamente,
resultando em padrões muito diferentes para aqueles vistos com menor ampliação. Os erros
nas medições neste nível de alta ampliação tendem a ser maiores devido à dispersão dos

39
padrões. A análise local demonstra grandes diferenças nas propriedades dos pontos dentro do
nível de cinza do padrão entre os métodos de aplicação. É essencial que a amostra preencha
bem o campo de visão e que a proximidade da amostra com a câmera seja calculada
minuciosamente, pois se for muito próxima pode haver perda de informação nas bordas, e se
muito pequena há perda de resolução espacial. A amostra deve permanecer no campo de visão
durante deformação e em casos de grandes deformações pode haver necessidade de ajuste
focal durante a deformação. O aumento da ampliação geralmente é usado quando as manchas
são muito pequenas para serem observadas em resoluções mais baixas, ou quando há grandes
gradientes localizados nos campos de deformação. Além disso, é extremamente recomendável
que o eixo central da câmera seja coincidente com o eixo normal ao centro geométrico do
corpo de prova analisado [77].
Outro ponto extremamente importante é a iluminação, que deve ocorrer de forma mais
homogênea possível, visando evitar ao máximo pontos de excesso ou falta de luminosidade, o
que atrapalha o contraste entre as manchas e o fundo do corpo de prova.
2.9 Parâmetros de Análise
2.9.1 Subconjuntos
O subconjunto é definido como a sub-região, formada por um conjunto de pixels
limitado, a qual será correlacionada a distribuição das tonalidades de cinza em imagens antes
e após a deformação para que os campos de deslocamento sejam calculados. Deve-se lembrar
que esta região pode obter diversos formatos, e também pode ter seu formato modificado
juntamente com a deformação, o que é regido pela função de forma que determina o limite
desta região. Um estudo muito detalhado sobre a participação e interferência das funções de
forma é realizado em [34] e [89].
Para a presente técnica não há diretrizes unânimes consolidadas pela bibliografia para
determinar o tamanho ótimo de um subconjunto e, portanto, é uma questão relativamente
subjetiva e dependente de fatores experimentais como distribuição morfológica das manchas,
resolução da câmera, tipo de corpo de prova.
Para alcançar uma análise de correlação confiável, o tamanho de subconjunto deve ser
grande o suficiente para que haja um padrão de intensidade suficientemente distinto contido
neste para se distinguir de outros subconjuntos, o que torna por esse fator desejável um

40
subconjunto maior. Paralelamente, é sabido que um subconjunto grande exigirá um tempo de
computação mais longo e dará um resultado médio, menos local, mais diluído e com menos
ruído do campo de deslocamento. Por outro lado, um subconjunto pequeno contém um
número insuficiente de recursos a serem correlacionados, portanto, no processo de correlação,
pode tornar difícil a distinção entre os subconjuntos devido ao aumento do número de
mínimos locais do coeficiente de correlação, o que pode gerar grandes erros nos resultados
[90]. Além disto, devido ao seu menor tamanho, há maior presença de ruídos nas medidas
com subconjuntos menores. Para deformações homogêneas, o gráfico de mitigação de erros
com o crescimento do tamanho de subconjunto é exemplificado na Figura 26.
Figura 26- Gráfico correlacionando o erro da medida do deslocamento com o tamanho de
subconjunto em deformações homogêneas (adaptado de [78]).
Entretanto, quando se usa subconjuntos muito grandes, devido à grande área de
reconhecimento e captação, resultados para maiores gradientes locais de deslocamentos, como
no caso de deformações heterogêneas devido à concentradores de tensão, podem ser
mascarados devido à maior diluição dos valores, gerando erro sistemático da medida. A
mesma condição pode ser bem utilizada para deformação homogênea, reduzindo o ruído,
porém à custa de resolução espacial. As duas demandas conflitantes acima indicam que existe
uma relação de compensação entre o uso de tamanhos de subconjuntos grandes e pequenos,
onde deve-se encontrar o ponto de equilíbrio para obter os melhores resultados [89] e [91]. Na

41
Figura 27, pode-se observar o erro de deslocamento associado ao tamanho de subconjunto
para deformação heterogênea, que foram maiores para maiores deformações.
Figura 27 - Erro da medida de deslocamento em relação ao tamanho do subconjunto,
para deformações heterogêneas (adaptado de [78]).
Algumas metodologias diretas para escolha do subconjunto foram propostas
recentemente para a quantificação, como a utilização de algoritmos utilizando diretamente as
grandezas já citadas Entropia de Subconjunto [92], Soma do quadrado de gradientes de
intensidade de subconjunto [82], onde um algoritmo iterativo analisa o valor da grandeza em
relação à um limiar, mostrando-se relativamente eficientes nesta relação, porém exigindo o
desenvolvimento de algoritmos um pouco mais complexos.
Em 2003, ZHANG et al. [93] examinaram as influências do tamanho do subconjunto,
na precisão da medição de deformação e concluiu que os valores ótimos dependem
diretamente da resolução da câmera, da velocidade computacional e da rede de manchas
presente. Em 2006, na mesma linha de estudo, LECOMPTE et al [94] estudaram a influência
do tamanho dos subconjuntos em relação ao tamanho das manchas através de deformações
numericamente geradas, revelando-se um método de sucesso para a determinação do
parâmetro ótimo. Posteriormente, PANG et al. [92] continuaram o trabalho, avaliando a
influência do tamanho do subconjunto sobre a precisão da quantidade medida, concluindo

42
parcialmente que maiores tamanhos de subconjunto geram um menor desvio padrão e um
maior nível de precisão. Eles afirmaram que quanto maior o tamanho do subconjunto,
melhores as condições de correlação, gerando menor o desvio padrão e um maior nível de
precisão, diminuindo o erro randômico, ideia que também foi reforçada por HADDADI et al.
[80], em 2008. De forma mais completa, CUI et al. [89] analisaram não somente o tamanho
do subconjunto utilizado, mas também sua forma e orientação, observando que o alongamento
da forma dos pode ser muito útil em padrões anisotrópicos e que orientando-se o eixo do
subconjunto para o eixo do padrão também favorece os resultados. Em 2015, de forma
bastante inovadora, um método de seleção automática do subconjunto foi proposta por
PANIN [95] através do desenvolvimento de um algoritmo para medição direta e automática
do erro mínimo de deformação para diversos tamanhos deste.
De forma mais direta e prática, através de diversas análises, descobriu-se que para
haver uma boa precisão e isotropia no processo de correspondência entre as imagens
analisadas, deve haver no mínimo três manchas, individuais e bem definidos, por subconjunto
[91]. Nesse contexto, outros trabalhos utilizaram desta consideração para desenvolver
modelos geométricos próprios para o cálculo do parâmetro ótimo de subconjunto, obtendo
sucesso em suas medições e levando em considerações a distribuição de tamanho das
distâncias entre as manchas presentes [96] e [77].
Assim sendo, de acordo com a literatura, é importante enfatizar que a escolha do
tamanho do subconjunto depende da qualidade do padrão de manchas, bem como do campo
de aplicação, definindo-se um limite mínimo para este que é muito dependente com a
distribuição e as características físicas da rede de manchas. Por exemplo, durante os processos
de correspondência de imagens, alguns padrões de manchas exigem um tamanho de
subconjunto grande o suficiente para conter recursos suficientes que permitam distinguir-se
do subconjunto deformado. Em comparação com outro padrão de manchas, de contraste mais
nítido, um pequeno subconjunto contém recursos que são suficientes para fornecer resultados
precisos. Outro fator crucial é o grau de homogeneidade da deformação visto que o tamanho
do subconjunto também está completamente atrelado a garantir a resolução espacial
necessário para ambos os tipos de deformação.

43
2.9.2 Tamanho de Passo
O tamanho de passo é o intervalo espacial entre dois pontos nos quais é realizada a
correlação do subconjunto, fazendo com que este parâmetro defina a distância entre os pontos
de dados de deslocamento adjacentes, que são medidos pelo software, e a quantidade de
pontos de dados que estarão presentes nos campos calculados de deslocamento. Assim sendo,
quanto menor o tamanho de passo, maior será a quantidade de informações no campo de
deslocamentos, aumentando a precisão deste em relação às deformações locais, entretanto
haverá um aumento considerável no tempo e esforço computacional empregados.
WANG et al. [97] observaram que a influência do tamanho do passo no campo de
deslocamento é menor, porém ainda existente, o que é bastante razoável considerando o
princípio da técnica. No processo de correspondência, apenas o tamanho do subconjunto está
envolvido no cálculo, enquanto o tamanho da etapa não é. Assim, idealmente, o campo de
deslocamento resultante é bem menos dependente do tamanho do passo. Entretanto, para o
cálculo do campo de deformações, a influência deste parâmetro já possui maior importância,
visto que ira determinar o tamanho do extensômetro virtual local, como será demonstrado na
próxima sessão.
2.9.3 Raio de Deformação
Esta grandeza é definida como o raio que ira definir o tamanho do campo de dados de
deslocamento que serão interpolados para gerar um campo de deformações local. A área total
de interpolação, em pixels, será dada pelo produto do raio de interpolação de deformação e do
tamanho de passo escolhido, conforme exemplificado na Figura 28.

44
Figura 28 - Representação esquemática da zona de interpolação para cálculo da deformação
(adaptado de [76]).
De forma semelhante, não existe uma regra geral consolidada para a escolha do
tamanho desta grandeza. Geralmente o que é feito são estudos avaliando o erro de medida
presente para diversos raios para encontrar na pratica o valor de grandeza ótimo a ser
utilizado, porém isto só é possível caso a deformação imposta seja previamente conhecida por
outra metodologia.
Por gerar resultados advindos de um processo de interpolação, a escolha desta
grandeza pode fortemente ter interferência de forma compensatória em dois tipos de erro
relacionados à medida: o erro sistemático e o erro randômico. Para o cálculo de deformações,
o erro sistemático esta relacionado a problemas no processo de cálculo em si que geram
resultados falsos, porém que geralmente possuem pouco ruído. Já o erro randômico está
relacionado à imprecisão das medidas, que gera flutuações em torno de um valor central
médio, que está de acordo com a realidade. Para deformações heterogêneas, como no caso de
corpos entalhados sob tensão ou compressão, este processo compensatório se torna ainda mais
importante.
Para o caso de raios de interpolação altos, haverá um mapa de deformações com pouco
ruído devido à dissolução das flutuações presentes, gerando um resultado mais homogêneo,
porém que podem ser falso, principalmente próximo a locais onde há gradientes maiores de
deformação e concentração desta. Já para pequenos raios de deformação, devido a possíveis

45
imprecisões de medida, poderá haver um mapa de deformações com maior ruído, porém com
valores localmente muito mais condizentes com a realidade, principalmente para locais com
altos gradientes de deformação [98]. Este tipo de comportamento é exemplificado na Figura
30.
Figura 29 -Influência do raio de deformação nos valores medidos de deformação (adaptado de
[99]).
2.10 Erros Associados
Devido à digitalização das imagens capturadas, a suposição da forma deformada do
subconjunto e os erros sistemáticos da instalação experimental, e até mesmo incertezas no
tratamento dos dados obtidos, ocorrem vários erros potenciais na técnica. Assim sendo,
diversos trabalhos analisaram as principais fontes de erros e, paralelamente, o grau de
intensidade como cada condição pode interferir diretamente nos resultados obtidos.
Em 1988, SUTTON et al. [100] realizaram os primeiros trabalhos de modelagem para
identificar os fatores que influenciam a precisão da técnica DIC, examinando imagens
digitalizadas de corpos de prova deformados com valores conhecidos. Percebeu-se que fatores
como a aquisição pela câmera, razão dos sinais e frequência de captação foram os principais
responsáveis. Em 2008, em um estudo bastante completo, HADDADI et al. [80] analisaram

46
erros associados com o aparato experimental, avaliando também iluminação, a qualidade da
câmera e das lentes, a presença de deslocamentos fora do plano e a organização das diversas
peças do próprio aparato. Este concluiu que os erros associados às medidas aumentam com o
deslocamento imposto, tanto translacional como rotacional. Além disso, reforçou a ideia de
que os erros estão fortemente associados à iluminação adequada e à distorção nas lentes e ao
paralelismo do aparato experimental, enquanto que os erros fora do plano também são
inversamente proporcionais à distância da câmera ao corpo de prova e podem ser mitigados
pelo uso de lentes telecêntricas, o que foi corroborado por SUTTON et al. posteriormente
[34].
Complementando, JERABEK et al. [101] e HOULT et al. [102], em 2010 e 2013,
respectivamente, reforçaram a linha de estudos em erros relacionados à condições de ensaio
como iluminação, qualidade da câmera e também a vibração presente, consolidando mais
ainda a ideia da essencialidade uma iluminação bem elaborada, da grande quantidade de
incerteza relacionada ao movimento fora do plano de medição e, também, concluindo que a
vibração presente possui efeito pouco significativo na medição.
Em outro foco, PAN et al. [62] analisaram o erro sistemático associado à distorção das
lentes que, segundo o mesmo estudo, ocorre inevitavelmente devido à irregularidade presente
na lente, gerando erros de medição que se espalham aleatoriamente pela amostra, porém com
menor intensidade no centro desta, o que favorece análises em corpos de prova entalhados
com extremidades próximos à estas zonas.
Desta forma, com os diversos avanços e estudos realizados, é bastante consolidada a
grande sensibilidade desta técnica em relação a diversos fatores experimentais, que podem ser
fontes de incertezas. Assim sendo, mostra-se cada vez mais necessária atenção especial à
fatores como iluminação homogênea, alinhamento, qualidade dos equipamentos para que
medições com alto fator de precisão sejam alcançadas.
2.11 Correlação Digital de Imagem em Carregamentos Dinâmicos
Com a evolução dos aparelhos e equipamentos necessários para a captação e
tratamento das imagens, a técnica de correlação digital de imagem também evoluiu para o
campo de medidas em alta velocidade, com câmeras captando um número bem maior de

47
frames por segundo, permitindo obter propriedades dos materiais para ocasiões de impacto e
altas taxas de deformação. Com isto, embora o alto custo do equipamento, a dificuldade de
obter dados interpretáveis e a tendência de obter imagens embaçadas, diversos trabalhos
foram propostos com utilização e otimização desta técnica para este tipo de ocasião. Observa-
se trabalhos para avaliação de propriedades dinâmicas diversos materiais sob solicitação
dinâmica, com a presença de deformações transientes, como aços [103], concretos reforçados
[55], alumínio [104], polímeros [37], Inconel [105] e até mesmo para material ósseo [106],
envolvendo técnicas que vão desde compressão e tensão de impacto, cisalhamento, impacto
balístico, vibração, demonstrando ser uma ferramenta razoável para diversos tipos de
materiais e comportamentos sob carregamentos rápidos. Uma revisão bem detalhada sobre os
principais ensaios mecânicos de alta taxa de carregamento envolvendo a correlação digital de
imagem é apresentado por AMOS et al. [107], dentre os quais os mais comuns são a barra
Hopkinson de pressão, o ensaio de soco dinâmico e de tração com altas taxas de deformação.
Observando por outro ponto, a correlação digital de imagem nos permite observar o
deslocamento da onda mecânica e do campo de deslocamentos através do tempo, avaliando a
interferência também de concentradores de tensões, como foi feito detalhadamente por YIN et
al. [108] através de testes por uma barra Hopkinson de pressão e demonstrando que há um
determinado tempo, da ordem de microssegundos, para que o corpo alcance o equilíbrio
dinâmico, conforme exemplificado na Figura 30 e Figura 31.
Figura 30 - Exemplo de medição da propagação da onda mecânica em um corpo através do
campo de deslocamento gerado pela correlação digital de imagem [108].

48
Figura 31 - Comparação das deformações locais em 3 regiões do corpo de prova de acordo
com o tempo (adaptado de [108]).
Devido ao caráter de movimento rápido do corpo de prova, as imagens tendem a ficar
embaçadas, e, assim sendo, o parâmetro mais importante para haver uma boa captação de
imagem é o tempo de exposição da câmera, ou seja, o inverso do número de frames por
segundo. Quanto menor este tempo, melhor será a qualidade da imagem. Uma revisão sobre a
precisão e as condições dos equipamentos necessários foi realizada por. REU [109],
demonstrando a importância de uma boa calibração e seleção do equipamento. Além disto,
constatou-se que a dificuldade de manter a câmera completamente parada durante o
experimento devido às altas energias cinéticas envolvidas. Paralelamente, MURRAY et al
[110] avaliaram a relevância da razão da frequência do corpo de prova em relação à
frequência do sinal monitorado e a razão entre o sinal e ruído, demonstrando que havendo
uma textura adequada, as frequências do corpo de prova e a razão sinal ruído medidas são
próximas à medidas de um acelerômetro, com boa precisão e acurácia. No mesmo contexto,
em 2013, ZAPPA et al [111] quantificaram as incertezas das medidas para o carregamento
dinâmico, obtendo valores, em relação ao deslocamento, entre 2,8% e 5%, reforçando ainda
mais a aplicabilidade desta metodologia. BEDSOLE et al [112] utilizaram desta técnica em
avaliação de flexão dinâmica para compósitos de fibra de carbono simples e com matriz
reforçada com nanotubos de carbono, constatando aumento da tenacidade para ambos as
situações para situações de impacto, e com o reforço dos nanotubos também contribuindo
para aumento da tenacidade. No mesmo ensaio, este observou maior tenacidade para fratura
intralaminar do que interlaminar.

49
Por último, GUO et al. [113] abordaram uma técnica para desfocagem e tratamento
das imagens obtidas através de abordagem dinâmica visando estimar a função de propagação
do ponto durante o ensaio. Embora o método para este tipo de aplicação já tenha demonstrado
sucesso e esteja em consolidação, ainda não há ideia unanime sobre a influência exata dos
parâmetros de teste utilizados.
2.12 Integral-J
2.12.1 Tenacidade à Fratura
Tenacidade à fratura é definida como termo genérico para as medidas da resistência de
um determinado material em relação à propagação de trincas, e assim sendo, tal propriedade
desempenha papel essencial na aplicação da mecânica da fratura em estudos de integridade
estrutural, análise de qualidade e de design da tolerância ao dano para diferentes estruturas e
componentes de engenharia. Nesse contexto, diversas grandezas foram modeladas para
quantificar tal característica de forma a permitir o desenvolvimento de novas estruturas e
metodologias que permitem avaliar a aplicação de diversos materiais sob as mais diversas
solicitações, sendo possível assim estimar a durabilidade e a garantia de estabilidade das mais
diversas estruturas.
O fator de intensidade de tensões K, proposto por IRWIN em 1957 [114] relatou sobre a
intensidade dos campos de tensão elásticos próximos a uma ponta de trinca, determinando a
primeira quantificação da tenacidade à fratura apresentada e sendo diretamente relacionada à
teorias propostas anteriormente que designavam sobre a taxa de liberação de energia na
propagação de defeitos. Posteriormente, em 1963, WELLS propôs o método do CTOD (crack
tip opening displacement), avaliando relações da tensão aplicada com a abertura da trinca e
criando assim outra metodologia para avaliação da tenacidade à fratura [115]. Mais
recentemente, em 1968, foi proposto por RICE [116] o método da Integral J, caracterizando a
intensidade de campos elastoplásticos próximos a pontas de trinca e representando outra
maneira de calcular a taxa de liberação de energia em um material.
2.12.2 Integral-J: Definição Clássica
Para estruturas com alta presença de plasticidade a fratura linear elástica não pode
demonstrar de forma acurada o comportamento em fratura e, com isto, um novo modelo

50
alternativo de avaliação de mecânica da fratura englobando também comportamentos não
lineares se tornou necessário. Foi com esta necessidade que, em 1968, RICE [116]
desenvolveu a metodologia da integral-J, criando um modelo que permitia quantificar a
tenacidade à fratura à partir da avaliação dos campos de tensão e deformação sob um caminho
fechado em torno de uma trinca. Assim sendo, a definição e o sentido físico de J é similar
àquela proposta para a taxa de liberação de energia elástica G, porém J é uma função mais
geral e abrangente desta mesma taxa de liberação, também em situações não lineares, sendo
assim um dos parâmetros mais generalizados e utilizados para quantificar a tenacidade à
fratura de materiais elásticos e elastoplásticos. Para tal desenvolvimento, o autor considerou
que mesmo para deformações elastoplásticas, a curva de deformação do material pode ser
considerada como uma situação elástica não linear, tornando a modelagem teórica mais
simples, porém limitando aos casos onde não haja descarregamento visto que não haveria
retorno de deformação da fração plástica.
Baseado em uma sua análise de conservação e liberação de energia, Rice descreveu a
integral J da seguinte forma:
J = ∫ 𝑊𝑑𝑦 − 𝑇𝑖
𝜕𝑢𝑖
𝜕𝑥
𝛤 ds Eq. 14
Onde cada grandeza é definida da seguinte forma:
- 𝛤 é uma linha arbitrária fechada em torno da abertura da trinca, com inicio na parte superior
da trinca, e seguindo no sentido anti-horário até o seu término na parte superior da trinca.
- u é o vetor deslocamento, representando a variação de posição em relação a cada eixo.
- W é a densidade de energia de deformação, ou seja, a energia acumulada de deformação por
unidade de volume. Para um material elástico, um incremento infinitesimal desta grandeza é
definido como sendo o trabalho por unidade de volume feito pela tensão aplicada durante um
também infinitesimal incremento na deformação. Assim sendo, este pode ser definido da
seguinte forma:
W=∫
1
2𝜎𝑖𝑗𝑑휀𝑖𝑗
𝜀𝑖𝑗
Eq.15

51
onde σij e εij são, respectivamente, os tensores de tensões e deformações presentes.
- y é a direção perpendicular à linha de crescimento da trinca. X é a direção de crescimento da
trinca.
- T é o vetor representando as forças por unidade de área atuando em determinado plano em
um material sob solicitação mecânica. Para este caso, é o vetor representando as tensões
normais ao contorno utilizado e é expressado da seguinte forma:
Ti=σijnj Eq.16
onde nj representa o vetor normal ao contorno Γ, conforme exemplificado na Figura 32.
Figura 32 - Representação esquemática dos termos utilizados no calcula da integral-J
Assim sendo, podemos interpretar esta grandeza como sendo a variação decrescente da
energia potencial por incremento da extensão da trinca presente, sendo esta representada pela
soma infinitesimal da densidade de energia acumulada pela deformação (1° termo da integral)
subtraída pela soma infinitesimal do trabalho realizado pelas forças atuantes (2° termo da
integral), podendo ser representada por uma integral de linha, em sentido anti-horário e com
independência em relação ao caminho quando é ausente de carregamentos não proporcionais,
fato comprovado pelo próprio RICE [116] e confirmado por KOBAYASHI et al. [117] por
método dos elementos finitos , permitindo que o contorno seja selecionado o mais próximo
possível da trinca, buscando um resultado mais preciso. No entanto, é importante lembrar que
em materiais elastoplásticos parte da energia de deformação absorvida não é recuperada

52
quando há crescimento de trinca ou descarregamento e, com isto, outra visão para esta
grandeza é relacionada com a diferença na energia absorvida durante um carregamento por
espécimes com diferentes tamanhos de trinca, sendo também uma das bases das avaliações
experimentais de J [118] ou também como uma forma de caracterização da intensidade dos
campos de deformação. Também devido a esta ausência de recuperação para qualquer
deformação com componente plástica, recomenda-se o uso desta grandeza para até o
momento de iniciação da trinca, o que torna o método bastante adequado para sua utilização
em metodologias como a Lei dos efeitos dos tamanhos proposta por BAZANT et al. [119] e
utilizada em diversos trabalhos recentemente [53] [23] [120]. Pode ser possível obter
resultados bastante consistentes em alguns casos além da iniciação, mas o uso da integral-J
desta forma seria puramente empírico.
Nota-se que para maior simplificação dos cálculos, e tendo em vista a recorrente
simetria dos carregamentos, o modelo é pioneiramente aplicado em duas dimensões, não
levando em consideração tensões e deformações na direção da espessura e levando em conta
que em ambos os estados planos, a representação planar pode ser assumida. Entretanto, nota-
se também que o conceito de integral-J pode ser expandido para casos tridimensionais,
possuindo valor que varia ao longo da frente de crescimento e perdendo a modelização como
integral independente do caminho, como é demonstrado por BAKKER et al. [121].
2.12.3 Forma Alternativa de J
De forma alternativa, a equação regente do modelo da integral J, representada pela
Equação 14, pode ser representada utilizando-se de um vetor normal à linha de contorno
utilizada para a integração. Desta forma, consideremos que um incremento infinitesimal ao
longo do contorno ds pode ser representado da seguinte forma:
{
𝑑𝑠 = (𝑑𝑥 , 𝑑𝑦) 𝑑𝑥 = − 𝑛2 ∗ 𝑑𝑠 𝑑𝑦 = 𝑛1 ∗ 𝑑𝑠
Eq.17
Eq.18
Eq.19
onde n= (n1, n2) é o vetor normal à linha de contorno, com módulo unitário, apontado no
sentido para fora da área interna ao contorno, o que implica logicamente que o produto escalar
entre n e ds é nulo.

53
Substituindo as postulações relatadas nas Equações 16, 17, 18 e 19 na Equação 14,
obtém- se a seguinte expressão:
J = ∫ (𝑊 𝑛1 − 𝜎𝑖𝑗𝑛𝑗
𝜕𝑢𝑖
𝜕𝑥 )
𝛤𝑑𝑠 Eq.20
De forma mais completa, pode-se utilizar da função delta (δ) de Kronecker para deixar
todos os termos da integral em função de nj, deixando a expressão mais simples. Assim sendo
define-se a função δ da seguinte forma:
δ = [1 00 1
] Eq.21
Inserindo esta função na equação 20, a mesma toma o seguinte formato:
J = ∫ (𝑊𝛿1𝑗 − 𝜎𝑖𝑗 𝜕𝑢𝑖
𝜕𝑥 )𝑛𝑗
𝛤𝑑𝑠 Eq.22
É importante observar que esta forma alternativa da equação coloca todos os termos em
uma integral relacionada apenas a ds, unificando os termos, além de garantir um modelo
matematicamente mais didático e completo, o que permite a leitura mais fácil desta grandeza
para desenvolvimento de algoritmos em mecânica computacional e também para cálculos
através da análise das medidas de campos como, por exemplo, no caso do desenvolvimento
do modelo através de dados gerados por captação de imagem [69].
2.12.4 Integral J para Fratura Dinâmica
Embora o desenvolvimento do modelo clássico da integral J e de seus modelos
derivados tenha ganhado cada vez maior aplicabilidade, é válido lembrar que estes são válidos
para ocasiões com crescimento estacionário de trinca, ou seja, não são apropriados para
abordagens em casos de solicitação dinâmica, onde há um carregamento em alta velocidade
ou quando a propagação do defeito ocorre de forma demasiadamente rápida.
Outra propriedade que pode ser alterada para casos elastodinâmicos se refere à
independência do caminho, visto que quando o equilíbrio dinâmico ainda não está presente, a
onda mecânica que já alcançou determinado contorno pode não ter chegado à outro, o que

54
geraria um campo de tensões completamente diferente e, consequentemente, valores de J
diferentes [122].
Visando adaptar a aplicação desta importante teoria também para casos
elastodiâmicos, ESHELBY et al. [123] propuseram um novo cálculo da taxa de liberação de
energia, semelhante à condição quase estática, porém com o termo da densidade da energia
elástica substituído pela densidade de energia mecânica total, isto é, a densidade de energia
elástica somada à de energia cinética, que agora teoricamente não é mais desprezível. Em
prosseguimento do trabalho, um pouco após, em 1970, FREUND [124] desenvolveu a
expressão integral para a taxa de liberação dinâmica de energia derivando-a diretamente das
equações de campo para materiais elastodinâmicos. Assim sendo, este autor através da
aplicação de teorias generalizadas de mecânica do continuo e do teorema da divergência,
obtém-se um modelo o qual consta que o fluxo instantâneo total de energia através de uma
superfície limitada por Γ próximo à ponta da trinca é igual a:
F(Γ)=∫ ((𝑊 + 𝑈)v′𝑛1 − 𝜎𝑖𝑗𝑛𝑗
𝜕𝑢𝑖
𝜕𝑡)𝑑𝑠
𝛤 Eq.23
onde o termo associado U esta associado à energia cinética presente no processo e
corresponde a:
U =
1
2 ρ
𝜕𝑢𝑖
𝜕𝑡 𝜕𝑢𝑖
𝜕𝑡 Eq.24
Foi demonstrado por [125] que esta integral de fluxo não é necessariamente
independente do caminho, o que pode ser compreendido parcialmente devido ao caráter
ondulatório dos campos, que pode modificar consideravelmente o termo representado pelo
integrando. Além disto, recomenda-se que o modelo de integral proposto se aplique em
contornos mais próximos à trinca, o que pode tornar seu uso dificultado pela ausência de
precisão dos campos nesta região, e assim sendo esta equação pode ser escrita de outras
formas mais condutivas a análise numérica.
Sabe-se que a relação entre a taxa de liberação de energia dinâmica Gd é igual ao fluxo
total de energia representado pela equação acima dividido pela velocidade de propagação da
trinca (v), o que nos fornece a seguinte expressão, que e válida também para comportamentos
não lineares, porém, como dito, é dependente do caminho:

55
Gd=
1
𝑣 ∫ ((𝑊 + 𝑈)v′𝑛1 − 𝜎𝑖𝑗𝑛𝑗
𝜕𝑢𝑖
𝜕𝑡) 𝑑𝑠
𝛤 Eq.25
𝜕𝑢𝑖
𝜕𝑡 = - v’
𝜕𝑢𝑖
𝜕𝑥 Eq.26
Levando em consideração a Equação 26, válida para expressar a velocidade de um
ponto quando há um sistema convectivo de coordenadas fixado na ponta da trinca, e
considerando que o termo convectivo será dominante na região envolta pelas faces da trinca e
pelo contorno Γ a expressão acima pode ser reescrita da seguinte forma, eliminando os termos
dependentes da velocidade de propagação:
Gd= ∫ ((𝑊 + 𝑈)𝑛1 − 𝜎𝑖𝑗𝑛𝑗
𝜕𝑢𝑖
𝜕𝑥) 𝑑𝑠
𝛤 Eq.27
De forma conseguinte, adiciona-se à expressão acima o termo inercial originado da
mecânica do continuo, sugerido por ATLURI et al. [126] em 1982 e reforçado por
NISHIOKA et al. [127]. Este termo também leva em conta a aceleração presente e é integrado
na área C limitada pelo contorno utilizado. Assim sendo a expressão toma a seguinte forma:
Jd = ∫ ((𝑊 + 𝑈)𝑛1 − 𝜎𝑖𝑗𝑛𝑗𝜕𝑢𝑖
𝜕𝑥) 𝑑𝑠
𝛤 + ∫ 𝜌
𝜕 𝑢1 2
𝜕𝑡2
𝐶
𝜕𝑢𝑖
𝜕𝑥1𝑑𝐶 Eq.27
Esta equação, para situações de mecânica da fratura dinâmica pode ser utilizada
principalmente em duas situações mais comuns, a para trincas crescendo em estado
estacionário e para corpos sob ação de impacto, porém sem propagação de defeitos, apenas a
iminência destes acontecerem.
2.12.5 O Uso da Integral-J Dinâmica
Em 1985, NAKAMURA et al. [128] desenvolveram os primeiros métodos
computacionais para o cálculo desta integral dinâmica, através de modelos numéricos e
analíticos, considerando o comportamento do material e também avaliando a propagação da
onda mecânica no mesmo, obtendo sucesso em seu modelo. De forma conseguinte, com o

56
avanço do método de elementos finitos, esta integral também foi utilizada por NISHIOKA et
al. [129] visando avaliar a variância desta em relação à zona de processo e desenvolver um
método para separação dos componentes em modos de fratura mistos, além de desenvolver
um plano de controle para permitir a simulação de curvas de propagação dinâmicas. Mais
recentemente, o mesmo modelo de integral foi utilizado para avaliar a fratura em materiais
funcionais em grade [130] pelo método dos elementos livres de Galerkin para casos
estacionários e não estacionários, demonstrando que a integral-J varia racionalmente com o
tempo e a propagação da trinca, obtendo sucesso para seu modelo. Em outro ramo de
materiais, em 2003, NISHIOKA et al. [122] utilizaram este modelo para analisar a
propagação dinâmica de trincas interfaciais em cerâmicas piezoelétricas, obtendo relações
diretas entre o valor de J e os fatores de intensidade de tensões e de deslocamentos elétricos.
Em um estudo focado na importância do termo inercial, HOSSEINI et al. [131]
utilizaram da teoria da termo-elasticidade para calcular os termos envolvidos na integral-J
dinâmica. Foi constatado que o termo inercial possui oscilação de forma muito semelhante ao
termo estático e pode possuir valores de até 30% do valor total.
2.12.6 Trincas em Estado Estacionário
Particularmente, para casos de propagação de trinca em estado estacionário como, por
exemplo, para casos onde há carregamento rápido, porém com propagação da trinca de forma
estacionaria considerando o equilíbrio dinâmico alcançado podemos considerar que a
aceleração é nula (𝜕 𝑢1 2
𝜕𝑡2= 0), e é também válida a Equação 26. Assim sendo a Equação 28,
para J, assume a seguinte forma:
Jd = ∫ ((𝑊 +1
2𝜌v′2
𝜕𝑢𝑖
𝜕𝑥1
𝜕𝑢𝑖
𝜕𝑥1) 𝑛1 − 𝜎𝑖𝑗𝑛𝑗
𝜕𝑢𝑖
𝜕𝑥)𝑑𝑠
𝛤 Eq.29
2.12.7 Utilização Antes da Propagação
Embora o uso da integral-J dinâmica seja parcialmente restrito para materiais
elastoplásticos, ele pode ser utilizado para o caso de carregamento dinâmico até o ponto de

57
iniciação de defeito, que é o caso do presente trabalho. Com isso, considerando a velocidade
de propagação nula, teremos que a Equação 28, se reduz à expressão abaixo:
J = ∫ (𝑊 𝑛1 − 𝜎𝑖𝑗𝑛𝑗𝜕𝑢𝑖
𝜕𝑥 )
𝛤𝑑𝑠 + ∫ 𝜌
𝜕 𝑢1 2
𝜕𝑡2
𝐶
𝜕𝑢𝑖
𝜕𝑥1𝑑𝐶 Eq.30
Utilizando a função δ, a expressão se modifica para:
J = ∫ (𝑊 𝛿1𝑗 − 𝜎𝑖𝑗𝜕𝑢𝑖
𝜕𝑥 )
𝛤𝑛𝑗𝑑𝑠 + ∫ 𝜌
𝜕 𝑢1 2
𝜕𝑡2
𝐶
𝜕𝑢𝑖
𝜕𝑥1𝑑𝐶 Eq.31

58
3. MATERIAIS E MÉTODOS
3.3 Corpos de Prova de Fibra de Carbono
Para os ensaios realizados, foram utilizados corpos de prova de material compósito
laminado de fibra de carbono com resina epóxi, de especificação HEXCEL IM7 – 8552,
conhecido por boas propriedades de resistência ao impacto e ao dano, e comumente utilizado
em componentes estruturais primários na indústria aeronáutica. Estes, por sua vez, foram
confeccionados através de um processo de pré-impregnação seguido de um processo de cura
padronizado.
Assim sendo, de acordo com um ciclo térmico especifico, tem-se amostras
retangulares de compósitos laminados pré-impregnados [132] devidamente curados,
compostos por 32 camadas de fibra unidirecionais sobrepostas de forma com que a camada
seguinte esteja orientada perpendicularmente em relação à anterior, formando um laminado
simétrico do tipo [0/90]16s, com 0,125 mm de espessura por camada, totalizando uma
espessura de 4 mm para cada corpo de prova. As propriedades mecânicas para este material
estão dispostas na Tabela 2.
Tabela 2 - Propriedades físicas e mecânicas do material compósito laminado utilizado [133]
Propriedade Quase-Estático Dinâmico
Densidade (g/cm3) 1,550 1,550
Ex (Mpa) 67449 67126
Ey (Mpa) 67449 67126
Gxy (Mpa) 5,068 6,345
ν 0,032 0,032
Espessura da camada (mm) 0,125 0,125
Após a cura, as amostras foram cortadas e usinadas por um disco serrador com pontas
de diamante nas extremidades dos dentes, de forma cuidadosa e controlada, visando evitar a
inserção de qualquer defeito que pudesse alterar os resultados experimentais tais como
delaminação das camadas, tensões residuais, deformação plástica, pequenas trincas, decoesão.
O corte foi realizado com o objetivo de gerar a geometria final dos corpos de prova, com 4
tamanhos diferentes, correspondentes ao A até D, todos bi-entalhados de forma simétrica, na

59
altura da metade do comprimento da peça. Cada entalhe tem comprimento igual à um quarto
da largura do corpo de prova que, por sua vez, possui dimensão igual à 2/3 do comprimento
do mesmo corpo de prova. Os comprimentos das diferentes peças estão escalados em uma
progressão aritmética de 7,5 mm, partindo do comprimento inicial de 10 mm. Para evitar
contato entre as faces do entalhe e mitigar erros experimentais causados por isto, as
superfícies do entalhe foram separadas por 1 mm em todos os corpos de prova. Ao mesmo
tempo, frisa-se que o formato e a dimensão do entalhe, gerando um extremo semicircular de 1
mm de diâmetro, não interferem nas propriedades de fratura analisadas [54] e, além disso , no
momento do inicio de propagação de trinca, onde nossas análises são realizadas , esta já é
considerada fina e também não interfere nos valor das propriedades analisadas. É importante
lembrar que a dimensão w deve ser grande suficiente para que, no período de interesse, as
ondas mecânicas refletidas nas extremidades não alcancem a ponta da trinca [128]. O modelo
dos corpos de prova está esquematizado na Figura 33. Os valores referentes às dimensões dos
corpos de prova e dos entalhes presentes nos mesmos estão dispostos na Tabela 3.
Figura 33 - Modelo dos corpos de prova DENC utilizados.
Tabela 3 – Valores das dimensões dos corpos de prova
Corpo de Prova R (mm) w (mm) a (mm)
A 0,5 5 2,5
B 0,5 7,5 3,75
C 0,5 10 5
D 0,5 12,5 6,25

60
3.4 Ensaio de Carregamento Dinâmico
Visando obter as propriedades de fratura dinâmica desejadas, foram realizados ensaios
mecânicos de impacto dinâmico, utilizando-se tensões compressivas, com aparato e
parâmetros adequados, descritos a seguir.
Para os testes dinâmicos, foi utilizada uma barra Hopkinson de pressão (SHPB) de aço
inoxidável, composta por um projétil, uma barra incidente e uma barra de transmissão com
todas com seção circular e com, respectivamente, 0,6, 1,6 e 2,6 metros de comprimento.
Modeladores de pulso circulares de cobre de tamanhos proporcionais às condições dos testes
foram inseridos de forma concêntrica na superfície de impacto da barra incidente, visando
aprimorar a qualidade da transmissão das ondas mecânicas e mitigar ruídos. Da mesma forma,
o diâmetro das barras incidentes (db) é escolhido de acordo com o tamanho do corpo de prova.
Na metade da barra incidente, assim como na barra de transmissão próximo ao corpo de
prova, são instalados extensômetros, para que possa ser mensurada a deformação destas e
também a tensão momentânea. O sinal dos extensômetros é amplificado por módulos
condicionadores de sinal, sendo posteriormente captado por um osciloscópio, que exporta-os
para um computador de forma a serem processados. Uma excelente revisão sobre os aspectos
de utilização deste equipamento é apresentada por JIANG [20]. O aparato é esquematizado na
Figura 34.
Figura 34 - Representação esquemática do funcionamento da barra Hopkinson de pressão.
O projétil, que é descrito como uma barra de ataque, é impulsionado por uma bomba
de pressão até uma velocidade V0, na qual se choca com a barra incidente. Desta forma gera-

61
se uma onda mecânica incidente compressiva, que se propaga pela barra incidente até chegar
ao corpo de prova. A onde compressiva se propaga pelo corpo de prova até encontrar a
superfície livre do entalhe e parte desta se reflete de volta na forma de uma onde de tensão
enquanto outra parte continua para o restante da amostra. Visando manter a mesma taxa de
propagação de energia mecânica e também a mesma taxa de deformação, tornando a
propagação das ondas mecânicas de forma homogênea para todos os testes, os outros
parâmetros de ensaio foram ajustados, por cálculos e simulação computacional de elementos
finitos, para cada tamanho de corpo de prova ensaiado, de forma semelhante à feita na
literatura [15]. Este ajuste dos parâmetros foi realizado por um parceiro do grupo, Peter
KUHN [133], no laboratório parceiro localizado no Instituto de Compósitos de Carbono da
Universidade Técnica de Munique, onde também foram realizados os testes, fugindo do
escopo central do trabalho. Desta forma, foram calculados os devidos parâmetros a serem
utilizados, sendo estes demonstrados na Tabela 4. É importante ressaltar que após os testes
ocorre destruição total e fragmentação dos corpos de prova, tornando imprecisa e inconclusiva
qualquer análise visual destes via microscopia ou metodologia semelhante.
Tabela 4 - Parâmetros utilizados nos ensaios de impacto dinâmico
Parâmetros A B C D
Diâmetro da Barra (mm) 16 18 25 25
Velocidade do Projétil (m/s) 8.6 9.4 11.0 12.1
3.5 Correlação Digital de Imagem
3.5.1 Aquisição de Imagem
Para desenvolver uma boa análise de imagem, é essencial a aquisição destas de forma
correta e minuciosa. Para isto, utilizou-se uma câmera de alto desempenho modelo
PHOTRON AS-Z, com frequência de aquisição de 300.000 frames por segundo e resolução
de 256 x 128 pixels2. Esta, por sua vez, foi posicionada e fixada de forma a captar imagens
exatamente frontais (eixo da câmera perpendicular ao plano da superfície maior) dos corpos

62
de prova durante todo o processo; antes, durante e depois da fratura. O modelo da câmera e o
seu posicionamento são demonstrados na Figura 35.
Figura 35 - Posicionamento do aparato para os ensaios. Câmera posicionada em frente
ao local de impacto na peça.
Para cada geometria de corpo de prova testado, a câmera foi ajustada para uma
determinada distância do corpo de prova, senda esta maior para quanto menor o corpo de
prova, visando manter um padrão de visualização da peça na câmera, tornando
aproximadamente igual à quantidade de pixels que varrem o comprimento do corpo de prova,
o que faz variar a relação mm/pixel. Desta forma, quem observa as imagens para as diferentes
geometrias, aparenta observar amostras do mesmo tamanho, a não ser pelo entalhe. E também
é importante notarmos que, embora a altíssima capacidade de captação de imagens por tempo,
este tipo de câmera possui uma resolução baixa quando comparada a câmeras de baixa
capacidade de captação por tempo [102], que limita, em relação ao refino de dados, as
análises a serem feitas. As imagens são adquiridas em escala de cinza, e alguns exemplos são
demonstrados na Figura 36.

63
Figura 36 - a,b) Imagens de peças antes da fratura, c) Imagem de peça durante propagação da
trinca, d) Imagem de peça completamente fraturada.
É importante ressaltar que esta técnica, devido à aquisição de imagem em duas
dimensões capta apenas as deformações nestas duas dimensões. Todavia, devido ao
comportamento mecânico do laminado e a sua espessura, não se espera deformação
considerável em Z, o que poderia levar a delaminações. Assim sendo, considera-se o estado
plano de tensões e deformações e pode-se considerar que a imagem capturada fornece todas
as deformações presentes.
3.5.2 Critério de Iniciação de Defeito
Para a seleção do frame de iniciação, onde o defeito se formou e começou a sua
propagação, utiliza-se como critério o momento no qual o extensômetro presente na barra
Hopkinson detectou a tensão máxima do ensaio. Em seguida, observando as imagens
relacionadas ao frame associado a este momento, confere-se o campo de deformações,
analisando principalmente nos locais onde há concentração de tensões compressivas. Caso a
concentração de tensões esteja concentrada apenas na ponta do entalhe, aceita-se este frame
como sendo o de iniciação. Caso o campo de tensões se expanda para uma zona maior, na
área entre entalhes, considera-se que o defeito já iniciou a sua propagação e, dessa forma,
considera-se o frame anterior ao de tensão máximo como sendo o frame de iniciação.
a) b)
d) c)

64
3.6 Análise da Imagem
3.6.1 Caracterização do Padrão de Manchas
A singularidade de cada região analisada só será garantida caso a superfície tiver um
padrão não-repetitivo, isotrópico e de alto contraste, permitindo assim o devido
reconhecimento digital do deslocamento da superfície. Visando obter tais condições, é
essencial a escolha apropriada dos parâmetros da correlação digital de imagem e, para tal fato,
deve-se realizar uma caracterização completa da imagem, levando em consideração diversas
características como o tamanho dos manchas, sua morfologia, o caminho livre entre estes, o
gradiente de cor e o grau de cobertura , assim como feito em diversos trabalhos [85].
Assim sendo diversas técnicas foram propostas para esta caracterização conforme
citadas na revisão bibliográfica. Devido a sua simplicidade e objetividade, o método escolhido
foi a análise estatística de morfologia, semelhante à realizada por [78] e [94], sendo realizada
com o auxilio do software IMAGEJ. Juntamente com a distribuição de tamanhos das
manchas, foram calculadas o grau de cobertura das manchas e a distribuição de caminhos
livres entre os mesmos. Deve-se lembrar que anteriormente à caracterização, realiza-se ajustes
na imagem em relação às condições de visualização, brilho e contraste para que haja maior
precisão na análise.
3.6.2 Preparação da Imagem
Para realização da análise morfológica das manchas, é necessária a adequação das
imagens dos corpos de prova, que se da através das seguintes etapas subsequentes:
Ajuste de Contraste e Brilho: Primeiramente, realiza-se um ajuste no brilho e no
contraste da imagem, fazendo com que esta se torne um pouco mais iluminada e que a
distribuição de tonalidade dos pixels se torne mais ampla, varrendo uma gama maior de tons
de cinza, o que ira tornar a imagem adequada para o processo seguinte de binarização. A
imagem resultante após esta etapa é exemplificada na Figura 37.

65
Figura 37 - Imagem do corpo de prova após ajuste de brilho e contraste
Binarização: Consiste na aplicação de uma distribuição binária para a tonalidade dos
pixels. Assim sendo, é definido um limiar limite, sendo os pixels com tonalidade de cinza
acima deste valor serão considerados na tonalidade máxima (preto absoluto) e os pixels com
tonalidade abaixo do mesmo serão considerados na tonalidade mínima (branco absoluto). Para
uma aplicação padronizada deste processo para todas as imagens, foi utilizado um filtro local
automático de Bernsen, com um raio de 15 pixels, que é um recurso presente no software
ImageJ. Dessa forma, o filtro analisa a imagem selecionando o limiar adequado local para o
processo de binarização da imagem. Ao final do processo, a imagem se encontra em apenas
duas tonalidades, como na observado na Figura 38.
Figura 38 - Imagem do corpo de prova após tratamento de brilho e contraste, seguida de
binarização.

66
Separação de manchas coladas: Eventualmente, pode haver manchas que estão muito
próximos ou colados, e que no momento da análise de partículas seriam considerados como
um corpo so. Por tal fato, aplica-se o comando “Whatershed” para realizar a separação destas
partículas tocantes para que sejam considerados dois corpos diferentes pelo programa.
Suavização: Em seguida, para tornar a imagem mais limpa, com menos ruídos e
visando obter valores mais reais para o tamanho das manchas presentes, é aplicado o comando
“Despeckle”. Este, por sua vez, arredonda as extremidades das partículas, retirando pontas
geradas por ruídos na captação da imagem ou por pontos de tinta em locais não desejados, e
os readaptando para obter uma extremidade mais suave para as partículas.
Após todos os tratamentos de imagens necessários aplicados, a imagem se torna
semelhante à Figura 39, estando devidamente ajustada para as análises estatísticas necessárias
para a seleção dos parâmetros utilizados na correlação digital de imagem pelo software
NCORR.
Figura 39 - Imagem do corpo de prova após tratamento completo
3.6.3 Análise Estatística da Morfologia
Após a preparação da imagem, visando estimar o tamanho de subconjunto adequado
foi realizada a análise estatística morfológica das imagens, sendo realizada com o comando
“Analyse Particles” do software ImageJ. Foram considerados apenas partículas com uma área
formada por mais de 4 pixels e com circularidade entre 0,2 e 1, evitando assim que pequenas
linhas ou pontos de ruído remanescentes sejam considerados com manchas.

67
A análise do programa fornece, para cada mancha, os seguintes dados, demonstrados
na Figura 40:
- Diâmetro de Feret: Maior distância, em pixels, entre dois pontos quaisquer no
perímetro da partícula analisada. Equivale também ao diâmetro do circulo que circunscreve a
partícula completamente.
- Circularidade: Fator de forma que equivale à 4𝜋 .𝐴𝑟𝑒𝑎
𝑃𝑒𝑟𝑖𝑚𝑒𝑡𝑟𝑜² , sendo seu valor igual a 1
para uma circunferência perfeita e progressivamente decrescente para partículas mais
alongadas.
- Distância ao vizinho mais próximo: Distância, em pixels, do centroide de uma
partícula ao centroide da partícula mais próxima presente. Tem sua sigla representada como
NND, que vem do inglês “Nearest Neighboor Distance”.
Figura 40 - Representação do diâmetro de Feret do e da distância ao vizinho mais próximo
De acordo com os valores calculados pelo software para as características acima
citadas, é possível realizar uma análise estatística visando obter a distribuição de tamanhos
das manchas, assim como das distâncias mínimas que os separam. Dessa forma, constroem-se
os histogramas destas grandezas, juntamente com a distribuição acumulativa, considerando o
intervalo de bloco em um valor de 0,5 pixel, conforme exemplificado na Figura 41 e na
Figura 42.

68
Figura 41 - Histograma do diâmetro de Feret
Figura 42 - Histograma do caminho livre médio
Além disto, foi realizada, também com o programa ImageJ a análise da fração coberta
pelas manchas que é recomendável que respeite determinada faixa de percentual, conforme
citada na seção 2.8.4 da revisão bibliográfica.
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0
5
10
15
20
25
30
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35
Nú
me
ro d
e M
anch
as
Diâmetro de Feret (Pixels)
Distribuição de Diâmetros dos Manchas - A15
Freqüência
Acumulado
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
0
5
10
15
20
25
30
0 2 4 6 8 10 12 14 16 18 20 22 24 26 29 31 33 35
Nú
me
ro d
e M
anch
as
Caminho Livre Médio (Pixels)
Distribuição de Tamanhos de Caminho Livre Médio - A15
Freqüência
Acumulado

69
3.6.4 Modelo de Seleção do Subconjunto
Visando estimar o tamanho subconjunto necessário para a realização da correlação
digital de imagem, segue a sugestão de análise proposta por, que relata que para haver um
bom reconhecimento de deslocamentos, é recomendado que estejam presentes ao menos 3
manchas em cada subconjunto [34]. Lembrando que isto é justificado visto que um
subconjunto pequeno que envolva poucos dados é inadequado, pois se torna difícil de
distinguir-se dos outros, o que pode gerar um resultado corrompido [74]. Todavia, um
subconjunto maior exigirá um tempo de computação mais longo e dará um resultado mais
diluído e menos local do campo de deslocamento, o que não é recomendável para a ocasião de
deformações heterogêneas. Assim sendo, constrói-se um modelo analítico geométrico, no qual
as manchas são consideradas perfeitamente circulares e que os centros destes estão
localizados nos vértices de um triângulo equilátero, que é a distribuição mais homogênea
possível em torno de um mesmo ponto. Com isso, podemos considerar para este modelo que o
espaço entre os centros dos círculos é o valor de caminho livre entre as manchas e que o
diâmetro dos círculos se correlacionam com o diâmetro de Feret das manchas.
Considerando as informações acima citadas, para garantir que a área de subconjunto
satisfaça a condição proposta, sugere-se que o raio desta região deve ser equivalente ao
mesmo de uma circunferência que circunscreve a região contendo o triângulo equilátero que
com contém as manchas nos vértices. No entanto, para garantir que a maioria absoluta dos
subconjuntos analisados satisfaça a condição proposta foram feitas as seguintes
considerações:
- Para os raios dos círculos presentes nos vértices, utiliza-se a metade do diâmetro de Feret até
o qual estão contidos 95% dos valores da mesma grandeza calculados (D95%).
- Para os lados do triângulo, considerou-se o valor de caminho livre até o qual estão contidos
95% dos valores da mesma grandeza calculados (NND95%).
As considerações do modelo analítico estão exemplificadas na Figura 43.

70
Figura 43 - Representação esquemática do modelo geométrico proposto para o tamanho dos
subconjuntos.
Levando em conta o modelo explicitado acima, conclui-se, através de cálculos simples
de geometria plana que o valor do raio da circunferência que circunscreve perfeitamente o
arranjo geométrico considerado é:
Rsub= 𝐷95%
2 + NND95% * √3
3 Eq.32
3.6.5 Definição dos Parâmetros
Subconjunto
O tamanho do subconjunto é calculado de acordo com modelo explicitado na seção anterior.
Tamanho de Passo
Visando obter a maior quantidade de dados possível para um melhor refino dos dados
interpretados pelo software de correlação, o tamanho de passo escolhido para as análises foi
de 0 pixels. Ou seja, os dados referentes a deslocamento serão medidos com um intervalo de 0
pixels entre cada ponto medido, fazendo com que os pontos de dados sejam coincidente s com
todos os pixels, o que nos fornece um mapa de deslocamentos completo com dados referentes
à todos os pixels dentro da região de interesse.

71
Raio de Deformação
A literatura não explicita um valor ótimo de raio de deformação a ser utilizado. O que
geralmente ocorre é a calibração, por meio de outras técnicas de medida, dos parâmetros a
serem utilizados na correlação digital de imagem [91].Como no presente trabalho não há esta
comparação e o objetivo final é o cálculo da integral J, visando analisar a interferência deste
importante parâmetro nos futuros resultados, foram realizados cálculos com dados de
correlações digitais de imagem para diversos raios de deformação. Os raios de deformação
utilizados para geração dos campos de deformação foram 3, 5, 7, 9, 11, 13 e 15 pontos de
dados, que, no caso, equivalem aos mesmos valores em pixels.
3.6.6 Obtenção de Dados com o Software Ncorr
O procedimento da análise de correlação digital de imagem é realizado pelo software
NCORR [134], que realiza desde o reconhecimento e mapeamento dos deslocamentos até os
mapas de deformação em ambas as direções. O programa é um software de fonte aberta,
desenvolvido no Instituto de Tecnologia da Geórgia, com o intuito de realizar a correlação
digital de imagem através do MATLAB. Sendo assim, o programa possui uma interface
acessível e extremamente intuitiva, estando totalmente contido no ambiente MATLAB e
contendo ferramentas para geração automática de gráficos, sendo assim um programa flexível,
eficiente e de fácil utilização. Seus algoritmos são otimizados por uso de C++/MEX enquanto
sua interface é escrita em código-m.
3.7 Preparação dos Dados
Com a posse dos dados referentes às imagens adquiridas, aos campos de deslocamento e
deformação gerados pelo NCORR é necessário trata-los para que possam posteriormente
serem utilizados nos algoritmos matemáticos desenvolvidos para o cálculo de parâmetros de
fratura.
3.7.1 Dimensionamento do tamanho do corpo de prova

72
Visando calcular a relação mm/pixel para cada corpo de prova, o tamanho dos corpos de
prova, em pixels, foi mensurado utilizando o programa Paint, que nos fornece as coordenadas
dos pixels selecionados. Assim sendo, subtraindo as coordenadas dos extremos dos corpos de
prova calcula-se o tamanho do mesmo em pixels, e sabendo as dimensões dos corpos de prova
em milímetros, calcula-se a proporção mm/pixel.
De forma semelhante, com o uso da mesma ferramenta, descobriu-se as coordenadas (em
pixels) da ponta do entalhe, que é útil para a criação dos códigos dos algoritmos de cálculos
de parâmetros de fratura.
3.7.2 Transformações de Escala
As primeiras transformações realizadas são os ajustes de escala, modificando as
coordenadas para milímetros de também para pontos de dados, da seguinte maneira:
- Coordenadas (mm) = Coordenadas (Pixel) * Proporção (mm/pixel)
- Coordenadas (Pontos de Dados) = Coordenadas (Pixel) / (Tamanho de Passo + 1)
3.7.3 Grandezas em Relação ao Tempo
Para o cálculo de grandezas que relacionam os mapas de deslocamento e deformação com
o tempo, como, por exemplo, as derivadas dos deslocamentos em relação ao tempo (du/dt e
dv/dt) e também as acelerações (ax e ay) utilizou-se os dados gerados pelo NCORR e o valor
da taxa de captação de frames da câmera , que é de 300000 frames por segundo.
Calculando o inverso deste valor, temos a diferença de tempo entre os frames capturados,
que é de 0,3310-5
segundos, o que permite a construção de uma relação deslocamento x
tempo para todo o ensaio. Feito isto se utiliza da metodologia clássica de filtragem de
Savitzky-Golay [135], que utiliza de ajustes polinomiais locais, em ralação a um conjunto de
pontos escolhido, para aumentar a relação sinal-ruído sem distorcer grandemente o sinal,
suavizando os dados obtidos. O filtro aplicado utilizou de um polinômio de ajuste de ordem 3
e raio de 5 pontos.

73
3.7.4 Cálculo das Deformações
Conforme descrito em [75], os valores das deformações são calculadas diretamente pelo
software NCORR, seguindo um modelo de ajuste linear para uma superfície dentro de um raio
definido pelo usuário. As formulações utilizadas pelo software para o cálculo destas
grandezas estão dispostas abaixo.
εxx=
1
2 ( 2
𝜕𝑢
𝜕𝑥 + (
𝜕𝑢
𝜕𝑥)2 + (
𝜕𝑣
𝜕𝑥)2 ) Eq.33
εyy=
1
2 ( 2
∂v
∂y + (
∂u
∂y)2 + (
∂v
∂y)2 ) Eq.34
εxy=
1
2 ( 𝜕𝑢
𝜕𝑦 +
𝜕𝑣
𝜕𝑥
+𝜕𝑢
𝜕𝑥
𝜕𝑣
𝜕𝑦+𝜕𝑢
𝜕𝑦
𝜕𝑣
𝜕𝑦) Eq.35
É essencial observar que o valor de deformação de cisalhamento gerada pelo software é
a deformação de cisalhamento simples. Para a formulação da integral-J, será utilizada a
deformação de cisalhamento de engenharia, que é calculada da seguinte forma:
ϒxy = 2 εxy Eq.36
3.8 O cálculo da Integral J
O algoritmo para o cálculo do parâmetro de Integral J foi desenvolvido, na forma de uma
função que depende das propriedades do material, dos dados importados do software NCORR
e do corpo de prova que esta sendo analisado. Com os dados devidamente preparados, estes
são inseridos nas funções programadas, que irão automaticamente gerar os resultados da
integral-J e do termo inercial contido na formula. Desta forma os algoritmos de cálculos são
explicitados na próxima sessão.
Os valores 𝜕𝑢
𝜕𝑦 e
𝜕𝑣
𝜕𝑦 são calculados pelo próprio software NCORR, mas também podem ser
calculados através da função gradiente existente no Matlab. Para os presentes testes, utilizou-
se de um filtro gaussiano de raio de 5 pixels para mitigar os ruídos presentes nos dados de
deslocamento (u e v) gerados pelo NCORR, gerando um conjunto de dados de deslocamento

74
suavizado. Assim sendo, utilizou-se a função gradiente do Matlab para calcular as derivadas
do deslocamento (𝜕𝑢
𝜕𝑥,𝜕𝑣
𝜕𝑥𝑒𝜕𝑢
𝜕𝑦,𝜕𝑣
𝜕𝑦) já com os dados suavizados.
3.8.1 Método da Integral de Contorno
O modo de cálculo utilizado segue a metodologia proposta por CIDADE [4], que foi
apresentada no seminário Painel PEMM, no Departamento de Engenharia Metalúrgica e
Materiais da UFRJ, em 2016.
Primeiramente, insere-se na função o cálculo de fatores que estão dentro do
integrando, como por exemplo, as tensões presentes e o valor de densidade de energia
acumulada W, seguindo a teoria clássica dos laminados para compósitos ortotrópicos
apresentada na seção 2.6 e considerando o campo de deformações gerado pelo programa são
calculados da seguinte forma para cada pixel:
[
𝜎𝑥𝑥𝜎𝑦𝑦𝜎𝑥𝑦
] = 1
𝑡 [𝐴11 𝐴12 𝐴16𝐴21 𝐴22 𝐴26𝐴16 𝐴26 𝐴66
] [
휀 𝑥𝑥휀 𝑦𝑦ϒ 𝑥𝑦
] Eq.13
Aij= ∑ (𝑄𝑖𝑗)̅̅ ̅̅ ̅𝑘
𝑁𝑘=1 (𝑧𝑘 − 𝑧𝑘−1 ) =∑ (𝑄𝑖𝑗)̅̅ ̅̅ ̅
𝑘 𝑁𝑘=1 𝑡𝑘 Eq.9
Wxy=
12𝜎𝑥𝑥휀𝑥𝑥+
12𝜎𝑦𝑦휀𝑦𝑦+𝜎𝑥𝑦휀𝑥𝑦 Eq.37
Em seguida, os termos calculados são organizados em um somatório discretizado que
engloba todos os pixels presentes no contorno de integração considerado. Sendo assim cada
pixel fornece sua contribuição para a soma total de J, que é definida pela expressão abaixo
para o contorno considerado, que é subdividido em partes, conforme demonstra a Figura 44:

75
Figura 44 - Representação do contorno utilizado e suas faces componentes
J= JA-B + JB-C+ JC-D+JD-A Eq.38
A=(xf,yi) , B=(xf,yf) , C=(xi,yf), D=(xi,yi)
Expandindo-se a soma discretizada para cada região do contorno, temos que:
JClássico= ∑ (𝜎𝑥𝑦𝐴𝐷
𝜕𝑢
𝜕𝑦 + 𝜎𝑦𝑦
𝜕𝑣
𝜕𝑦 - W) dx +∑ (−𝜎𝑥𝑥
𝐵𝐴
𝜕𝑢
𝜕𝑦 - 𝜎𝑥𝑦
𝜕𝑣
𝜕𝑦) dy
+
∑ (𝐶𝐵 𝑊 − 𝜎𝑥𝑦 𝜕𝑢
𝜕𝑦 - 𝜎𝑦𝑦
𝜕𝑣
𝜕𝑦) dx+ ∑ (𝜎𝑥𝑥
𝐷𝐶
𝜕𝑢
𝜕𝑦 + 𝜎𝑥𝑦
𝜕𝑣
𝜕𝑦) dy
Eq.39
onde os valores de dx e dy serão equivalentes à razão milímetro/pixel da amostra analisada.
Nota-se que para este cálculo as direções dos eixos x e y estão trocados em relação ao
que usualmente usado na bibliografia, onde o eixo x corresponde à direção de crescimento da
trinca. Isto ocorre devido ao fato que o software NCORR possui eixos padronizados em
relação à imagens e, como nas imagens do ensaio a direção de propagação da trinca é
ortogonal ao eixo x estabelecido pelo software, adota-se os eixos de forma trocada, onde a
direção de crescimento da trinca é representada por y. Além disto, deve-se lembrar de que os
valores de tensão e deslocamento fora da região de interesse, onde passa uma parte do
caminho D-A são todos nulos, fazendo com que esta região não forneça nenhuma
contribuição para o cálculo de J.
Para o termo inercial, o cálculo é feito utilizando-se a área interna do contorno,
ocorrendo também de forma discretizada, da seguinte forma:

76
JInercial = ∑ ∑ 𝜌(𝑎𝑥𝜕𝑢
𝜕𝑦
𝑦𝑓𝑦𝑖
𝑥𝑓𝑥𝑖 + 𝑎𝑦
𝜕𝑣
𝜕𝑦 ) dC Eq.40
Onde dC, nesse caso, é igual à razão milímetro/pixel elevada ao quadrado. Por último, soma-
se o termo inercial com o termo clássico para obter o valor da integral-J.
J = JClássico + JInercial Eq.41
Os valores de J são calculados para ambos os entalhes, e considera-se os valores
oficiais àqueles relacionados ao entalhe que possuir o maior valor de J para o frame de
iniciação do defeito, que é de tal fato ocorreu.
3.8.2 Avaliação da Sensibilidade com o Tempo
Visando avaliar a variação do valor da integral-J com o tempo, analisando o histórico
de variação de energia acumulada no material até a sua falha, serão considerados 20 frames
anteriores ao frame de falha e também dois frames após, para todos os corpos de prova e
utilizando os parâmetros de análise pré-determinados citados abaixo. A escolha do raio de
deformação foi puramente arbitrária, em um valor mediano. A escolha do contorno foi feita
buscando-se diminuir a participação, na soma do algoritmo, de valores muito próximos à
ponta do entalhe, onde ocorre concentração de tensões e onde pode haver maiores ruídos,
podendo gerar resultados com menor confiabilidade, como cita a bibliografia [69]. A mesma
literatura recomenda também evitar contornos próximos às extremidades do corpo de prova.
O contorno utilizado é exemplificado na Figura 45.
Figura 45 - Representação das dimensões do contorno utilizado em relação ao corpo de prova.

77
Tabela 5 – Valores das dimensões do contorno utilizado em relação às dimensões do corpo
de prova
Largura do Contorno – 2L Altura do Contorno-2h Raio de Deformação
(Pixels)
0,7 * 3w 0,7 * w 7
3.8.3 Avaliação da Sensibilidade com o Raio de Deformação
Visando avaliar a dependência dos valores de integral-J para com o raio de deformação e,
consequentemente, com o tamanho do extensômetro local, foram gerados dados com o valor
do raio de deformação possuindo os seguintes valores, em pixels: 3, 5, 7, 9, 11,13 e 15.
Em seguida, utilizando os algoritmos desenvolvidos, calcula-se os valores de integral-J
para os dados correspondentes a todos os raios de deformação utilizados os algoritmos de
Integral-J por um domínio de superfície. Para estas análises, foi utilizado o mesmo contorno
utilizado na seção anterior.
3.9 Análise Estatística
Visto que os resíduos associados aos dados presentes no trabalho não seguem uma
distribuição normal e que, também, a distribuição das variâncias relacionadas às medidas para
cada raio de deformação não é homogênea, deve ser utilizado um teste estatístico não-
paramétrico, como, por exemplo, o reconhecido teste de Kruskal-Wallis, utilizado para
comparar 3 ou mais populações. Ele é usado para testar a hipótese nula de que todas as
populações possuem funções de distribuição iguais, contra a hipótese alternativa de que ao
menos duas das populações possuem funções de distribuição diferentes.
Assim sendo, visando provar estatisticamente a interferência do raio de deformação
selecionados nos resultados de J calculados, realiza-se um estudo estatístico dos valores
gerados, confeccionando, para cada grupo de amostras de mesmo tamanho, um estudo sobre a
análise de variância.
O teste de Kruskal-Wallis é o análogo ao teste F utilizado na ANOVA de 1 fator.
Enquanto a análise de variância dos testes depende da hipótese de que todas as populações em
confronto são independentes e normalmente distribuídas, o teste de Kruskal-Wallis não coloca
nenhuma restrição sobre a comparação. Suponha que os dados provenham de ensaios feitos

78
com raios de deformação diferentes, com tamanhos amostrais (número de réplicas) n1, n2, ...,
nk sendo N = n1 + n2 + ... + nk o número total de elementos considerados em todas as amostras.
Tabela 6 – Exemplo de tabela utilizada em teste de Kruskal-Wallis
Considerando que todas as medidas realizadas são mutuamente independentes,
considera-se a hipótese nula H0 o fato de conjuntos diferentes de amostras serem originadas
da mesma população, possuindo a mesma média, ou seja, para o presente caso, de não haver
diferença entre os conjuntos de medidas para cada raio, ou seja, de que não há efeito
pronunciado do raio de deformação nos resultados, associando as diferenças nos valores
medidos a erros aleatórios de medida presentes.
Para a aplicação desta metodologia, devemos colocar todas as N medidas associadas à
um mesmo tamanho de corpo de prova em um ranking, com valor de 1 para a menor medida e
valor de N para a maior medida. Com isso, o valor de Xij torna-se rij. Continuando, para cada
tamanho de raio de deformação, soma-se os valores de rij presentes, gerando um valor Ri.
Também para cada raio de deformação, divide-se este valor Ri pelo número de medidas
realizadas para o mesmo raio (ni), gerando um valor R’i. Deste modo, temos que R1 é a soma
dos postos dos elementos associados ao raio de deformação 3 e R’i. é o posto médio destas
mesmas observações. A estatística de Kruskal-Wallis, que segue aproximadamente uma
distribuição Χ², será dada por:
H = (12
N(N+1) ∑ R′i² ki=1 ) - 3 (N+1) Eq.42
onde k é o número de raios de deformação testados.

79
Em seguida são estabelecidas as hipóteses, sendo a nula afirmando que os conjuntos
de medidas realizados para diferentes raios são todos estatisticamente iguais, e a rejeição da
hipótese nula afirmando que nem todos são iguais:
{𝐻0 : 𝜇1 = 𝜇2 = ⋯ = 𝜇𝑘
𝐻1: 𝑁𝑒𝑚 𝑡𝑜𝑑𝑜𝑠 𝑠ã𝑜 𝑖𝑔𝑢𝑎𝑖𝑠
Assim sendo, calcula-se o valor de H através da metodologia proposta e, através do
software MATLAB, calcula-se o p-valor associado à distribuição Χ² para k-1 graus de
liberdade. Para o grau de significância escolhido α, também utilizando o MATLAB, calcula-
se o valor de Χ² (α, k-1). Caso o de Χ² (α, k-1) seja menor que o de H, rejeita-se a hipótese
nula.
Para os testes realizados, foi utilizado um grau de significância de 10% (α = 0,1), com
6 graus de liberdade visto que foram utilizados 7 tamanhos diferentes de raio de deformação.

80
4. RESULTADOS E DISCUSSÃO
4.3 Caracterização das Imagens
4.3.1 Fração Coberta pelas Manchas
Primeiramente, expõe-se o resultado para a análise de fração coberta pelas manchas,
disposto na Figura 46.
Figura 46 - Gráfico representando a fração coberta das manchas (o tamanho dos corpos de
prova aumenta da esquerda para a direita).
Nota-se que à medida que o tamanho do corpo de prova aumenta, o valor da fração
recoberta diminui gradualmente. Isto ocorre visto que para os corpos de prova menores a
câmera esta mais próxima no momento do ensaio, fazendo com que a relação mm/pixel seja
menor, e , com isto, manchas de tamanho real menor estejam na faixa de área maior que 4
pixels, fazendo com que o número de manchas analisadas seja maior e ,consequentemente, a
fração coberta por estas também. Em relação aos valores recomendáveis citados na seção
2.8.4 da revisão bibliográfica, contata-se que apenas os corpos de prova dos tamanhos A e B
estão dentro do valor recomendado. Assim sendo, recomenda-se para corpos de prova
maiores, onde a câmera fica mais distante, a mudança da aplicação das manchas para um
33,4 34,8 35
24,7
28,7 29
21,6 20,8 17,7 17,2 18,1
0
5
10
15
20
25
30
35
40
A1 A2 A3 B1 B2 B3 C1 C2 D1 D2 D3
Fraç
ão C
ob
ert
a (%
)
Corpo de Prova

81
método que fornece manchas um pouco maiores e em maior quantidade, visando aumentar a
área de cobertura das manchas para dentro do padrão recomendado. Este resultado também
reforça que a câmera utilizada possua a melhor resolução possível, para permitir a melhor
captação possível das manchas.
4.3.2 Cálculo do Modelo para os Subconjuntos
Havendo um modelo solidamente desenvolvido e os dados adequadamente calculados,
podem ser observar os valores de cada grandeza relacionada ao modelo representada na
Tabela 7. Nota-se que os valores das grandezas são números racionais visto que o software
image J permite a medição de grandezas em direções que interceptam o interior dos pixels
também, fornecendo valores racionais, mesmo em pixels que são as menores unidades
possíveis na imagem. Consequentemente, os valores de raio de subconjunto calculados
também são números racionais, que devem ser aproximados para os valores inteiros mais
próximos para que seja possível inserir o parâmetro no programa responsável pela correlação
digital de imagem.
Tabela 7 – Resultados das caracterizações de morfologia das manchas e do modelo de cálculo
de tamanho do subconjunto.
Corpo
de
Prova
Diâmetro
de Feret
Médio
(Pixels)
Diâmetro
de Feret
95%
(Pixels)
NND
Médio
(Pixels)
NND
95%
(Pixels)
Raio de
Subconjunto
Calculado
(Pixels)
Raio de
Subconjunto
Utilizado
(Pixels)
A1 8,38 16,5 7,58 11,5 14,89 15
A2 8,99 17,5 7,08 10,5 14,81 15
A3 9,36 17,5 7,53 10 14,52 15
B1 6,33 10 6,98 10,5 11,06 11
B2 7,88 14 8,09 12 13,93 14
B3 7,87 12,5 7,84 11,5 12,89 13
C1 6,68 10,5 7,26 11 11,60 12
C2 6,67 10,5 7,84 12 12,18 12
D1 5,55 9,5 7,96 11 11,10 11

82
D2 5,86 10 6,68 9,5 10,48 10
D3 5,81 10 7,34 10 10,77 11
Os valores de diâmetro de Feret médio diminuíram com o aumento do corpo de prova.
Isto ocorre visto que para corpos de prova maiores, a câmera esta um pouco mais distante e,
como as manchas são gerados do mesmo modo e seu tamanho real não muda, em média, de
uma aplicação para outra, corpos de prova com a razão milímetro/pixel maiores precisarão de
menos pixels para representar as manchas. Paralelamente, os valores para abranger 95% dos
tamanhos de diâmetro presentes também são maiores visto que a câmera esta mais próxima.
4.4 Ensaios de Impacto Dinâmico
Seguindo a metodologia descrita na seção anterior para os ensaios com a Barra
Hopkinson, foram obtidos os seguintes resultados para todos os corpos de prova:
Tabela 8 - Resultados das grandezas avaliadas no ensaio com a Barra Hopkinson
Corpo
de
Prova
Tamanho de
Entalhe
(mm)
Tensão de
Fratura
Dinâmica
(MPa)
Frame de
Fratura
Tensão de
Fratura
Estática
(MPa)
Razão
(Dinâmica/Estátic
a)
A1 2,50 383,03 84
310,00
1,23
A2 2,50 369,36 70 1,19
A3 2,50 406,20 77 1,30
B1 3,75 363,66 70
264,00
1,38
B2 3,75 343,83 102 1,30
B3 3,75 362,54 83 1,37
C1 5,00 327,51 48 253,00
1,29
C2 5,00 329,54 40 1,30
D1 6,25 307,99 80
234,00
1,31
D2 6,25 291,98 69 1,24
D3 6,25 296,36 62 1,26

83
Observa-se uma boa reprodutibilidade dos valores de tensão de fratura associada à
cada tamanho de corpo de prova, demonstrando boa aplicabilidade do aparato experimental
com a Barra Hopkinson de pressão. Além disto, observou-se um aumento das tensões de
fratura para o caso dinâmico para todos os ensaios realizados, em um fator que oscila entre
1,19 e 1,38, com uma média de 1,29 e desvio padrão de 0,05. Considerando este aumento da
tensão de fratura, a igualdade pratica dos módulos de compressão dinâmico e estáticos e
levando em conta o comportamento linear tensão-deformação do material sugerido pela
bibliografia [12], pode-se concluir que a tenacidade do material para altas taxas de
carregamento é maior que no caso quase estático. Este resultado reforça os dados obtidos por
KORBER [15], HSIAO et al. [12] e BING et al. [13].
4.5 Correlação Digital de Imagem
Da mesma maneira, ao se realizar as análises de correlação digital de imagem com o
uso do software NCORR, e utilizando-se dos parâmetros apropriados escolhidos
criteriosamente de acordo com a metodologia descrita, foram obtidos os seguintes resultados
para cada corpo de prova ensaiado.
Primeiramente, levando em consideração o tamanho real em mm de cada corpo de
prova e o tamanho da região de interesse, que engloba o tamanho do corpo de prova na
imagem, em pixels, realizou-se o cálculo da relação mm/pixel para cada espécime, para que
posteriormente os cálculos de grandezas físicas pudessem ser realizados em unidades reais do
sistema internacional. Os resultados seguem na tabela 9.
Tabela 9 - Resultados da relação mm/pixels para cada corpo de prova
CP Largura (Pixels) Largura (mm) Relação mm/pixel
A1 169 15 0,0888
A2 171 15 0,0877
A3 168 15 0,0893
B1 114 22,5 0,1974
B2 171 22,5 0,1316
B3 171 22,5 0,1316

84
C1 169 30 0,1775
C2 170 30 0,1765
D1 165 37,5 0,2273
D2 165 37,5 0,2273
D3 167 37,5 0,2246
Após o cálculo dos campos de deslocamento horizontais e verticais gerados pela
correlação de imagem, obtivemos imagens, para cada corpo de prova no frame associado à
maior tensão, sendo este considerado o de iniciação da falha. As imagens obtidas foram
semelhantes à Figura 47. Para os deslocamentos horizontais, observou-se, em todas as
amostras, o decréscimo dos valores da direita para a esquerda, com a zona de maior transição
de valores sendo observada entre os entalhes. Isto ocorre devido à propagação da onda
mecânica de compressão, que ocorre da esquerda para a direita, e que tem os entalhes como
obstáculos, onde não pode ocorrer a propagação. Assim sendo, a onda deve se concentrar e
propagar pela zona entre entalhes, sendo esta então a de maior gradiente de deslocamentos.
Para os deslocamentos verticais, observaram-se valores, em média, em torno de 10 vezes
menores que os horizontais, e não houve uma tendência clara em relação à distribuição de
valores, embora na maior parte dos corpos de prova os maiores deslocamentos tenham
ocorrido na zona entre entalhes. E importante lembrar que a tensão é aplicada pela barra
apenas na direção horizontal, o que explica o valor bem menor dos deslocamentos verticais,
que ocorrem devido ao coeficiente de Poisson e também de pequenos desalinhamentos no
carregamento. As imagens geradas para todos os corpos de prova estão dispostas no ANEXO
III deste trabalho.
Deslocamentos Horizontais Deslocamentos Verticais
Figura 47 - Campos de deslocamentos horizontais e verticais gerados pela correlação digital
de imagem para corpo de prova A1.

85
Para o campo de deformações, nas amostras em geral, nota-se que para a distribuição
das tensões compressivas ocorre de forma heterogênea, com os maiores valores de
deformação compressiva próximos às extremidades dos entalhes, como previsto teoricamente
e como exemplificado na figura abaixo para o C1. Além disso, os valores de deformação
encontrados para a zona de maiores deformações estão condizentes com os valores
encontrados por outros trabalhos da literatura explicitados na seção 2.3 da revisão
bibliográfica.
De forma única, podemos observar que para a amostra A2 a concentração das tensões
ocorre próximo à lateral inferior do corpo de prova, indicando que a falha não ocorreu na
extremidade do entalhe, e sim a partir desta lateral, de forma diferente às demais amostras.
Além disso, para a amostra C2, observou uma grande zona de concentração de deformações
entre entalhes, demonstrando que o defeito já havia começado sua propagação e com isto, o
critério da tensão máxima para validar o frame de iniciação não foi preciso e, com isto,
considerou-se o frame de iniciação como sendo o anterior ao proposto.
Em relação às deformações verticais, assim como para os deslocamentos, não houve
uma tendência clara na distribuição destas, estando distribuídas aleatoriamente nas amostras,
com valores negativos e positivos, demonstrando alternância entre zonas trativas e
compressivas. Além disto, como esperado e também observado para os deslocamentos, os
valores observados foram, em média, cerca de 10 vezes menor que aqueles observados para a
deformação horizontal. Isto é esperado visto que o carregamento é feito, teoricamente apenas
na direção horizontal, e assim a deformação, como explicado anteriormente para os
deslocamentos, ocorre devido ao coeficiente de Poisson do material e devido à possíveis
desalinhamentos no carregamento. Exemplos de campos de deformações estão demonstrados
nas Figuras 48 à 50.
Deformação Horizontal Deformação Vertical
Figura 48 - Campos de deformações horizontais e verticais para o corpo de prova C1.

86
Deformação Horizontal Deformação Vertical
Figura 49 - Campos de deformação horizontal e vertical para o corpo de prova A2
Deformação Horizontal Deformação Vertical
Figura 50 - Campos de deformação horizontal e vertical para o corpo de prova C2
4.6 Integral-J
4.6.1 Avaliação da Sensibilidade com o Tempo
Os resultados para a avaliação do valor de J com variação do tempo para 20 frames
antes do considerado frame de iniciação de defeito até 5 frames após este mesmo momento
estão dispostos nas figuras 51 à 54.

87
Figura 51 - Variação temporal da J para amostras A.
Figura 52 - Variação temporal da J para amostras B.
Figura 53 - Variação temporal da J para amostras C.

88
Figura 54 - Variação temporal da J para amostras A.
Como se pode observar, para todos os corpos de prova, os valores de J são crescentes
com o tempo à medida que a onda mecânica gerada pelo impacto da barra Hopkinson de
pressão se propaga pelo corpo de prova até o momento da falha do material, representado
pelos pontos escuros assinalados nos gráficos. Observa-se também que para o momento após
a iniciação da falha considerada houve aumento considerável do valor de J em um curto
espaço de tempo para todos os corpos de prova, exceto A3. Com base nestas informações, é
possível afirmar que o cálculo da integral-J para este tipo de solicitação mecânica é
extremamente sensível ao tempo, exigindo que os equipamentos de medição de tensão
presentes no aparato estejam perfeitamente calibrados para o fornecimento de dados precisos
do valor de tensão máxima em relação ao tempo, visto que este foi o critério adotado para
considerar a iniciação da trinca.
4.6.2 Valores da integral-J
Obtido todos os valores para o valor de J, montam-se as Tabelas 10 à 13 dispondo
estes valores para cada tamanho de raio de deformação, para todos os corpos de prova,
agrupados de acordo com o seu tamanho. Gráficos representando os resultados estão dispostos
nas Figuras 55 à 58.

89
Tabela 10 - Valores de Integral-J total e do termo inercial para amostras A.
CP Grandeza
Raio de Deformação
Média
3 5 7 9 11 13 15
A1
J Total
(kJ/m²) 46,45 45,82 46,87 46,92 47,33 47,47 47,49 46,91
Termo
Inercial
(kJ/m²) 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04
% Termo
Inercial 0,08 0,08 0,07 0,07 0,07 0,07 0,07 0,07
A2
J Total
(kJ/m²) 11,22 12,26 13,09 13,93 14,77 15,49 15,96 13,82
Termo
Inercial
(kJ/m²) 0,01 0,01 0,01 0,01 0,01 0,01 0,01 0,01
% Termo
Inercial 0,12 0,11 0,11 0,10 0,09 0,09 0,09 0,10
A3
J Total
(kJ/m²) 36,65 37,49 38,12 38,23 37,94 37,51 37,12 37,58
Termo
Inercial
(kJ/m²) 0,07 0,07 0,07 0,07 0,07 0,07 0,07 0,07
% Termo
Inercial 0,19 0,18 0,18 0,18 0,18 0,18 0,19 0,18
Média
J Total
(kJ/m²) 31,44 31,86 32,69 33,03 33,35 33,49 33,52 32,77
Termo
Inercial
(kJ/m²) 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04
% Termo
Inercial 0,13 0,12 0,12 0,12 0,12 0,12 0,12 0,12
Tabela 11 - Valores de Integral J Total e do termo inercial para amostras B
CP Grandeza
Raio de Deformação
Média
3 5 7 9 11 13 15
B1
J Total
(kJ/m²) 22,22 34,84 39,10 42,61 44,77 45,60 45,36 39,21
Termo
Inercial
(kJ/m²) 0,30 0,30 0,30 0,30 0,30 0,30 0,30 0,30

90
% Termo
Inercial 1,33 0,85 0,76 0,69 0,66 0,65 0,65 0,80
B2
J Total
(kJ/m²) 42,95 42,31 42,09 42,47 42,49 42,35 42,02 42,38
Termo
Inercial
(kJ/m²) 0,21 0,21 0,21 0,21 0,21 0,21 0,21 0,21
% Termo
Inercial 0,49 0,50 0,50 0,50 0,50 0,50 0,50 0,50
B3
J Total
(kJ/m²) 37,86 40,06 43,86 45,92 46,82 47,86 48,96 44,48
Termo
Inercial
(kJ/m²) 0,14 0,14 0,14 0,14 0,14 0,14 0,14 0,14
% Termo
Inercial 0,36 0,34 0,31 0,30 0,29 0,29 0,28 0,31
Média
J Total
(kJ/m²) 34,34 39,07 41,68 43,67 44,69 45,27 45,45 42,02
Termo
Inercial
(kJ/m²) 0,21 0,21 0,21 0,21 0,21 0,21 0,21 0,21
% Termo
Inercial 0,73 0,56 0,52 0,50 0,48 0,48 0,48 0,54
Tabela 12 - Valores de Integral J Total e do termo inercial para amostras C
CP Grandeza
Raio de Deformação
Média
3 5 7 9 11 13 15
C1
J Total
(kJ/m²) 54,34 56,14 58,27 60,50 63,15 65,13 67,33 60,69
Termo
Inercial
(kJ/m²) 0,58 0,58 0,58 0,58 0,58 0,58 0,58 0,58
% Termo
Inercial 1,06 1,03 0,99 0,95 0,91 0,89 0,86 0,96
C2
J Total
(kJ/m²) 54,18 57,88 57,67 58,17 58,26 51,08 52,39 55,66
Termo
Inercial
(kJ/m²) 0,52 0,52 0,52 0,52 0,52 0,52 0,52 0,52
% Termo
Inercial 0,97 0,91 0,91 0,90 0,90 1,03 1,00 0,94
Média
J Total
(kJ/m²) 54,26 57,01 57,97 59,33 60,71 58,10 59,86 58,18
Termo
Inercial
(kJ/m²) 0,55 0,55 0,55 0,55 0,55 0,55 0,55 0,55
% Termo
Inercial 1,01 0,97 0,95 0,93 0,91 0,96 0,93 0,95

91
Tabela 13 - Valores de Integral J Total e do termo inercial para amostras D
CP Grandeza
Raio de Deformação
Média
3 5 7 9 11 13 15
D1
J Total
(kJ/m²) 33,89 42,09 45,63 48,74 50,54 52,57 54,77 46,89
Termo
Inercial
(kJ/m²) 1,03 1,03 1,03 1,03 1,03 1,03 1,03 1,03
% Termo
Inercial 3,03 2,44 2,25 2,11 2,03 1,96 1,88 2,24
D2
J Total
(kJ/m²) 8,53 34,93 39,66 40,00 38,91 37,31 35,12 33,49
Termo
Inercial
(kJ/m²) 0,30 0,30 0,30 0,30 0,30 0,30 0,30 0,30
% Termo
Inercial 3,55 0,87 0,76 0,76 0,78 0,81 0,86 1,20
D3
J Total
(kJ/m²) 37,26 37,92 39,51 40,72 41,71 42,41 42,86 40,34
Termo
Inercial
(kJ/m²) 0,37 0,37 0,37 0,37 0,37 0,37 0,37 0,37
% Termo
Inercial 0,99 0,98 0,94 0,91 0,89 0,87 0,86 0,92
Média
J Total
(kJ/m²) 26,56 38,31 41,60 43,15 43,72 44,10 44,25 40,24
Termo
Inercial
(kJ/m²) 0,57 0,57 0,57 0,57 0,57 0,57 0,57 0,57
% Termo
Inercial 2,53 1,43 1,32 1,26 1,23 1,21 1,20 1,45

92
Figura 55 - Valores de J para as amostras A
Figura 56 - Valores de J para as amostras B
Figura 57 - Valores de J para as amostras C

93
Figura 58 - Valores de J para as amostras D
Em relação aos valores obtidos para o termo inercial, pode-se observar que estes são
bem pequenos, variando de 0,08 a 3% do valor total de J. Este comportamento pode ser
explicado também pela baixa densidade do material, em torno de 1,55 g/cm3, e também pelo
fato de a taxa de deformação utilizada, 100 s-1
, embora seja qualificada como carregamento
dinâmico, ainda é um valor relativamente moderado. Com isto, pode-se afirmar que qualquer
aumento pronunciado de tenacidade do material em comportamento dinâmico para estas
condições, assim como citado na seção 2.3 da revisão bibliográfica, se da por mecanismos de
deformação do próprio material, sendo a diferença já observada apenas pelo termo clássico da
integral J.
4.6.3 Análise Estatística
É importante lembrar que o corpo de prova A2, de acordo com a observação de seu campo
de deformações que demonstrou uma concentração de tensões na lateral do corpo de prova,
apresentou iniciação da falha a fora da extremidade do entalhe, com crescimento de trinca a
partir do mesmo ponto. Tal fato explica os valores de integral-J bem abaixo dos demais do
mesmo tamanho visto que o algoritmo desenvolvido para o cálculo de J é feito baseado em
um contorno com inicio e fim das faces opostas do entalhe. Assim sendo os valores
calculados pelo corpo de prova A2 não foram utilizados para as análises estatísticas.
Para o teste de Kruskal-Wallis com grau de significância de 10% (grau de confiança de
90%) e com 6 graus de liberdade, foram obtidos os resultados dispostos na Tabela 14.

94
Tabela 14 – Resultados do teste de Kruskal-Wallis
Tamanho de
Amostra H Calculado Χ² (0,1 ; 6) H > Χ² (0,1 ; 6) Resultado
A 1,71
10,645
Não Aceita-se
hipótese nula
para todos
B 9,57 Não
C 4 Não
D 8,57 Não
Tais resultados demonstram que para nenhum dos tamanhos de amostra é possível
afirmar com 90% de certeza que há influência pronunciada do raio de deformação nos
resultados. De tal forma, se aceita a hipótese nula que dita que os resultados para diferentes
raios de deformação são originados de populações com a mesma média, e que as diferenças
de medidas observadas para tamanhos de raios diferentes são consequência da variabilidade
aleatória dos dados. Os corpos de prova B e D apresentaram uma variação crescente da média
dos valores de J com o aumento do tamanho do raio de deformação, e por isto apresentaram
valores maiores de H, indicando uma maior possibilidade de efeito do tamanho do raio de
deformação, entretanto tal variação não foi suficiente para provar estatisticamente, com 90%
de certeza, que ha diferença gerada pela mudança do tamanho do raio. Para os corpos de
prova A o valor de H obtido foi bem pequeno vista a estabilidade dos resultados perante a
variação do raio. A variabilidade do valor de J em relação ao raio de deformação para
diferentes tamanhos de corpo de prova são demonstrados nas Figuras 59 à 62.
Figura 59 - Variabilidade de J para as amostras A

95
Figura 60 - Variabilidade de J para as amostras B
Figura 61 - Variabilidade de J para as amostras C

96
Figura 62 - Variabilidade de J para amostras D
Devemos observar que alguns tamanhos de raio obtiveram resultados mais confiáveis
e com uma menor variação entre os corpos de prova de mesmo tipo. Conforme demonstrados
nas figuras 59 à 62, para os tamanhos B e D, observa-se uma maior variabilidade dos dados
para o tamanho de raio 3, além deste tamanho gerar a menor média de valor de J dentre todos.
Além disto, para este tamanho foi observada a existência de valores bem destoantes dos
demais, como, por exemplo, para as amostra B1 e D2. Aliando isto ao fato de um raio
pequeno gerar um mapa de deformações com maiores ruídos e erros randômicos, conforme
demonstrado na Figura 63, a opção deste tamanho torna-se uma escolha não aconselhável.
Por outro lado, para tamanhos de raio de deformação maiores, como por exemplo, 13 e
15, para os corpos de prova C e D apresentam variâncias maiores em comparação aos
tamanhos de raio medianos. Da mesma forma, aliando isto ao fato destes raios maiores
gerarem um mapa de deformações mais diluído, com menos ruído, porém com valores que
podem estar mais distante da realidade, a escolha destes também não se torna aconselhável.
Por último, para tamanhos de raio medianos, de 7 à 9, em todos os corpos de prova, os
valores de variância apresentados foram relativamente pequenos quando comparados com os
demais. Além disto, os valores observados para as médias em todos os corpos de prova estão
próximos à média geral dos mesmos. Além disto, estes tamanhos de raio equilibram o erro
aleatório, o ruído do campo de deformações e o erro sistêmico causado pela diluição dos
valores de deformação heterogênea. Assim sendo, embora estatisticamente o efeito do raio de

97
deformação não seja pronunciado, para alcançar valores mais confiáveis e com equilíbrio dos
efeitos que levam a erros sistêmicos e aleatórios, recomenda-se a escolha de valores de raio de
deformação entre 5 e 9 para ao cálculo da integral-J por correlação digital de imagem com o
aparato experimental utilizado.
Abaixo, segue o gráfico da medida de deformação ao longo da linha B-C demonstrada
na Figura 44 para o corpo de prova C1 utilizando diversos tamanhos de raio de deformação
diferentes.
Figura 63 - Medida de deformação em linha B-C do contorno utilizado para o calculo de J
(Amostra C1)
4.6.4 Comparação com Resultados na Literatura
Ao utilizarmos a teoria explicitada por PINHO et al. [21] de que a tenacidade à fratura
compressiva em compósitos advém basicamente das fibras longitudinais à direção de
carregamento, visto que a fração da tenacidade total à compressão imposta pela matriz nas
camadas transversais é muito menor, pode-se relacionar o valor encontrado com o percentual
de fibras na direção longitudinal à carga compressiva. Assim sendo, para laminados cross-ply
(0/90°), como é o caso do utilizado no presente trabalho, a tenacidade à compressão na
direção longitudinal pode ser aproximada pelo dobro do valor encontrado, visto que a fração

98
de fibras na direção longitudinal é 50%. Assim sendo, uma comparação mais completa com a
bibliografia é permitida, conforme feito na Tabela 15.
Tabela 15 – Comparação dos valores de J encontrados com os valores da literatura.
Referência Empilhamento do Laminado Valores de J (kJ/m²)
Presente trabalho [(0/90°)]16s Entre 34 e 60
0° Entre 68 e 120
PINHO et al. [21] 0° Em torno de 79,9
CATALANOTTI et al. [23]
[22]
0° Entre 80 e 100
[(0/90°)] Em torno de 47
SOUTIS et al. [24] [25] [(0/90°)] Em torno de 39
LAFFAN [26] 0° Em torno de 25
LISLE et al. [27] [02/452/902/-452] Entre 41 e 72
Ao comparar os valores de J calculados no presente trabalho, já considerando os valores
gerados utilizando a faixa recomendável de raios de deformação (7 e 9 pixels), com os valores
obtidos por outros estudos sobre a tenacidade em compressão explicitados na seção 2.5,
podemos observar que os resultados estão condizentes com a bibliografia, estando na mesma
ordem de grandeza e em intervalos próximos com os valores encontrados nos outros
trabalhos, o que demonstra a aplicabilidade da técnica proposta e dos parâmetros escolhidos
para a análise.

99
5. Conclusões
De acordo com os resultados de J obtidos, condizentes com resultados na
literatura para materiais e condições similares, pode se afirmar que a metodologia
proposta para estimar o tamanho ideal de subconjunto para aplicação de correlação
digital de imagem apresenta bons resultados. Os campos de deslocamentos e
deformações fornecidos pelo DIC estão dentro do esperado, com valores proximos aos
citados na bibliografia para condições similares.
Para efeitos de comparação, foram feitas variações no raio de deformação
utilizado para o cálculo de J. Observou-se que, estatisticamente, não há efeito claro da
mudança deste parâmetro nos resultados, sendo as variações observadas geradas por
flutuações dos campos de deformação utilizadas para o cálculo de J. Entretanto, para
alguns corpos de prova, valores muito pequenos como 3 pixels ou muito grandes como
13 e 15 pixels apresentaram maior variabilidade de resultados. Por apresentarem uma
faixa de valores mais próximos à média geral, equilibrarem os efeitos de flutuações e
diluição e também apresentarem menor variabilidade, é recomendada a utilização de
raios medianos, entre 7 e 9.
Assim sendo, conclui-se que a técnica exige atenção especial à escolha dos
parâmetros de análise para garantir resultados confiáveis, assim como também uma
calibração extremamente precisa do aparato experimental para mitigar erros causados
por ineficiência e má distribuição da iluminação, desalinhamento da amostra e
defasagem da medida do momento da tensão máxima que, em especial, exige muito
cuidado visto que uma pequena defasagem de tempo na consideração do momento de
iniciação pode acarretar em grande diferença de resultados.

100
6. Sugestões para Trabalhos Futuros
Como sugestão para trabalhos futuros, pode-se indicar:
- Estudo mais aprofundado do mecanismo de deformação em carregamento dinâmico com
possibilidade de desenvolvimento de modelos de deformação.
- Realização do estudo da integral-J dinâmica para o mesmo tipo de ensaio, porém com
corpos de prova com diferentes sequências de empilhamento.
- Realização de ensaios mais completos, com auxilio de termografia e emissão acústica, para
observar todos os tipos de falha ocorrentes sob carregamento dinâmico, permitindo um
balanço energético mais completo do material.

101
7. Bibliografia
1. GIBSON, R. F. Priciples of Composite Materials Mechanics. Third Edition. ed. [S.l.]:
CRC Press.
2. ASHBY, M. F. Materials selection in mechanical design. 4th Edition. ed. [S.l.]:
Elsevier Science & Technology, 2010.
3. VICARI, A. Machine Design, 2015. Disponivel em:
<http://www.machinedesign.com/contributing-technical-experts/will-carbon-fiber-find-
widespread-use-automotive-industry>.
4. CIDADE, R. D. A. Estudo quantitativo da fratura dinâmica em materiais
compósitos. Anais da 2a Semana MetalMat e Painel PEMM 2016. Rio de Janeiro: [s.n.].
2016.
5. PARDINI, L. C.; PERES, R. J. C. Tecnologia de Fabricação de Pré-Impregnados para
Compósitos Estruturais Utilizados na Indústria Aeronáutica. Polímeros: Cíência e
Tecnologia, 1996.
6. PATEL, J. Mechanisms for Kink Band Evolution in Polymer Matrix Composites:A
Digital Image Correlation and Finite Element Study. ARIZONA STATE
UNIVERSITY. [S.l.]. 2016.
7. ROSEN, B. W. Mechanics of Composite Strengthening. Fibre Composite Materials,
1965.
8. A.S.ARGON. Fracture of Composites. Treatise on Materials Science & Technology, v.
1, p. 79-114, 1972.
9. BAZANT, Z. P. et al. Size effect on compression strength of fiber composites failing by
kink band propagation. International Journal of Fracture, v. 95, p. 103-141, 1999.
10. GREENHALGH, E. S. Failure analysis and fractography of polymer composites. [S.l.]:
WP, 2009. p. 107-163.
11. PINHO, S. T.; ROBINSON, P.; IANNUCCI, L. Fracture toughness of the tensile and
compressive fibre failure modes in laminated composites. Composites Science and
Technology, v. 66, n. 13, p. 2069-2079, 2006.
12. HSIAO, H. M.; DANIEL, I. M. Strain rate behavior of composite materials. Composites
Part B-Engineering, v. 29, p. 521-533, 1998.
13. BING, Q.; SUN, C. T. Modeling and testing strain rate-dependent compres- sive strength
of carbon/epoxy composites. Composites Science and Technology, v. 65, p. 2481-2491,

102
2005.
14. J.WIEGAND. Constitutive modelling of composite materials under impact loading.
University of Oxford. [S.l.]. 2008.
15. KORBER, H. Mechanical Response of Advanced Composites under High Strain
Rates. Faculdade de Engenharia da Universidade do Porto. Porto, p. 43-80,87-96. 2010.
16. YOKOYAMA, T. Impact Compressive Failure of a Unidirectional Carbon/Epoxy
Laminated Composite in Three Principal Material Directions. Materials Science Forum,
v. 706, 2012.
17. HOSUR, M. V. High strain rate com- pression response of carbon/epoxy laminate
composites. Composite Structures, v. 52, 2001.
18. ANDERSON, T. L. Fracture Mechanics: Fundamentals and Applications. Fourth
Edition. ed. [S.l.]: [s.n.], 1991.
19. LONDRES, G. L. Determinação de curvas de resistência de materiais compósitos em
regime dinâmico. Universidade Federal do Rio de Janeiro. Rio de Janeiro. 2017.
20. JIANG, F.; VECCHIO, K. S. Hopkinson Bar Loaded Fracture Experimental Technique:
A Critical Review of Dynamic Fracture Toughness Tests. Applied Mechanics Reviews,
v. 62, p. 1-39, 2009.
21. PINHO, S. T.; ROBINSON, P.; IANNUCCI, L. Fracture toughness of the tensile and
compressive fibre failure modes in laminated composites. Composites Science and
Technology, v. 66, p. 2069-2079, 2006.
22. CATALANOTTI, G.; D'AVILA , C. G.; CAMANHO, P. P. RESISTANCE CURVES
IN THE TENSILE AND COMPRESSIVE LONGITUDINAL FAILURE OF
COMPOSITES. DEMec, Faculdade de Engenharia, Universidade do Porto. Porto.
23. CATALANOTTI, G.; XAVIER, J.; CAMANHO, P. P. Measurement of the compressive
crack resistance curve of composites using the size effect law. Composites Part A:
Applied Science and Manufacturing, v. 56, p. 300-307, 2014.
24. SOUTIS, C.; FLECK, N. A. Failure Prediction Technique for Compression Loaded
Carbon Fibre-Epoxy Laminate with Open Holes. University of Surrey. [S.l.]. 1990.
25. SOUTIS, C.; CURTIS, T. A method for predicting the fracture toughness of CFRP
laminates failing by fibre microbuckling. Composites: Part A 31, v. 31, p. 733-740,
2000.
26. LAFFAN, M. J. et al. Measurement of the fracture toughness associated with the
longitudinal fibre compressive failure mode of laminated composites. Composites: Part

103
A, v. 43, p. 1930-1938, 2012.
27. LISLE, T. et al. Measure of fracture toughness of compressive fiber failure in composite
structures using infrared thermography. Composites Science and Technology, v. 112, p.
22-33, 2015.
28. REDDY, J. N. Mechanics of Laminated Composite Plates and Shells_ Theory and
Analysis. Second Edition. ed. [S.l.]: CRC Press, 2003.
29. Disponivel em: <http://www.intertechnology.com/Vishay/pdfs/TechNotes_TechTips/
TN-507.pdf.>.
30. ´DIAC, M. G. The use of full-field measurement methods in composite material
characterization: interest and limitations. Composites, v. 35, p. 751-761, 2004.
31. PAN, B. et al. Two-dimensional digital image correlation for in-plane displacement and
strain measurement: a review. Measurement Science and Technology, v. 20, 2009.
32. SUTTON, M. A. et al. Determination of displacement using an improved digital
correlation method. Image Vis Comput, v. 1, p. 133-139, 1983.
33. SUTTON, M. A. et al. Advances in two-dimensional and three-dimensional computer
vision. Photomech Top Appl Phys, v. 77, p. 323-372, 2000.
34. SUTTON, M. A.; ORTEU, J. J.; SCHREIER, H. W. Image correlation for shape and
deformation measurements: basic concepts, theory and applications. New York, NY:
Springer, 2009.
35. LAVA, P. et al. Impact of lens distortions on strain measurements obtained with 2D
digital image correlation. Opt Lasers Eng, v. 51, p. 576-584, 2013.
36. GOIDESCU, C. et al. Damage investigation in CFRP composites using full-field
measurement techniques: Combination of digital image stereo-correlation, infrared
thermography and X-ray tomography. Compos Part B, v. 48, p. 95-105, 2013.
37. KIRUGULIGE, M. S.; TIPPUR, H. V.; DENNEY, T. S. Measurement of transient
deformations using digital image correlation method and high-speed photography:
application to dynamic fracture. APPLIED OPTICS, v. 46, n. 22, p. 5083-5096, 2007.
38. RIZZUTO, E.; CAROSIO, S.; DEL PRETE, Z. Characterization of a Digital Image
Correlation System for Dynamic Strain Measurements of Small Biological Tissues.
Experimental Techniques, 2014.
39. GAO, G. et al. Investigation of the rate dependence of fracture propagation in rocks using
dig- ital image correlation (DIC) method. Engineering Fracture Mechanics, 2015.

104
40. WALKER, A.; GILAT, T. T.; SCHMIDT, A. L. Full Field Strain Measurement in
Compression and Tensile Split Hopkinson Bar Experiments. Experimental Mechanics,
v. 49, p. 291-302, 2009.
41. KYLER, R. K.; JIANWEI, T.; WIGGINS, J. S. Thermal and volumetric property analysis
of polymer networks and composites using elevated temperature digital image
correlation. Polymer Testing, v. 58, 2017.
42. JIN, T. et al. Thermal buckling measurement of a laminated composite plate under a
uniform temperature distribution using the digital image correlation method. Composite
Structures, v. 123, 2015.
43. MAO, W. G.; CHEN, J.; SI, M. S. High temperature digital image correlation evaluation
of in-situ failure mechanism: An experimental framework with application to C/SiC
composites. Materials Science and Engineering: A, v. 665, 2016.
44. MONTESANO, J. et al. Modeling fatigue damage evolution in polymer matrix composite
structures and validation using in-situ digital image correlation. Composite Structures,
v. 125, 2015.
45. GOIDESCU, C. et al. Damage investigation in CFRP composites using full-field
measurement techniques: Combination of digital image stereo-correlation, infrared
thermography and X-ray tomography. Composites: Part B, v. 48, 2013.
46. JOHANSON, K.; HARPER, L. T.; WARRIOR, N. A. Heterogeneity of discontinuous
carbon fibre composites: Damage initiation captured by Digital Image Correlation.
Composites Part A: Applied Science and Manufacturing, v. 68, 2015.
47. GIANCANE, S. et al. Fatigue damage evolution of fiber reinforced composites with
digital image correlation analysis. Procedia Engineering, v. 2, 2010.
48. LI, et al. Measurement of the full-field polymerization shrinkage and depth of cure of
dental composites using digital image correlation. Dental Materials, v. 25, 2009.
49. PAN, B. et al. Two-dimensional digital image correlation for in-plane displacement and
strain measurement: a review. Measurement Science and Technology, v. 20, 2009.
50. HE, T.; MAKEEV, A.; SHONKWILER, B. Characterization of stress–strain behavior of
composites using digital image correlation. Composite Structures, v. 140, 2016.
51. GONZALES, G. L. G. et al. A J-integral approach using digital image correlation for
evaluating stress intensity factors in fatigue cracks with closure effects. Theoretical and
Applied Fracture Mechanics, 2017.
52. KOOHBOR, B. et al. A DIC-based study of in-plane mechanical response and fracture of

105
orthotropic. Composites: Part B, v. 14, 2014.
53. CATALANOTTI, G.; XAVIER, J. Measurement of the mode II intralaminar fracture
toughness and R-curve of polymer composites using a modified Iosipescu specimen and
the size effect law. Engineering Fracture Mechanics, v. 138, p. 202-214, 2015.
54. RATCLIFFE, J.; JACKSON, W.; SCHAFF, J. Predicting the compression strength of
impact damaged sandwich panels. 2nd International conference on composites testing
and model identificatio. Bristol: [s.n.]. 2004.
55. ZHAO, Y. R. et al. Experimental study on dynamic mechanical properties of the basalt
fiber reinforced concrete after the freeze-thaw based on the digital image correlation
method. Construction and Building Materials, v. 14, 2017.
56. PINTO, M.; GUPTA, S.; SHUKL, A. Study of implosion of carbon/epoxy composite
hollow cylinders using 3-D Digital Image Correlation. Composite Structures, v. 119,
2015.
57. YAO, X. F.; MENG, L. B.; JIN, J. C. Full-field deformation measurement of fiber
composite pressure vessel using digital speckle correlation method. Polymer Testing, v.
24, 2005.
58. TEKIELE, M. et al. Application of Digital Image Correlation to composite
reinforcements testing. Composite Structures, v. 160, 2017.
59. CANAL, L. P.; GONZALEZ, C.; ALDAREGUIA, J. M. M. Application of digital image
correlation at the microscale in fiber-reinforced composites. Composites: Part A, v. 43,
2012.
60. MEHDIKHANI, M.; ARAVAND, M.; SABUNCUOGLU, B. Full-field strain
measurements at the micro-scale in fiber-reinforced composites using digital image
correlation. Composite Structures, v. 140, 2016.
61. GODARA, A.; RAABE, D. Influence of additives on the global mechanical behavior and
the microscopic strain localization in wood reinforced polypropylene composites during
tensile deformation investigated using digital image correlation. Composites Science
and Technology, v. 69, 2009.
62. WANG, X.; AHN, J.; KABOGLU, C. Characterisation of composite-titanium alloy
hybrid joints using digital imagem correlation. Composite Structures, v. 140, 2016.
63. VERSTRAETE, M. A. et al. Determination of CTOD resistance curves in side-grooved
Single-Edge Notched Tensile specimens using full field deformation measurements.
Engineering Fracture Mechanics, v. 110, 2013.

106
64. FAYYADA, T. M.; LEES, J. M. Application of Digital Image Correlation to reinforced
concrete fracture. Procedia Materials Science, v. 3, 2014.
65. DEHNAVI, M. R. Y.; ESHRAGHI, I.; SOLTANI, N. Investigation of fracture
parameters of edge V-notches in a polymer material using digital image correlation.
Polymer Testinh, v. 32, 2013.
66. JIANG, Y. et al. Measurement ofJ-integralinCAD/CAMdental ceramics and composite
resin by digital image correlation. Journal of mechanical behavior of biomedical
materials, v. 62, p. 240-246, 2016.
67. ALLAER, K. et al. Direct fracture toughness determination of a ductile epoxy polymer
from digital image correlation measurements on a single edge notched bending sample.
Polymer Testing, v. 42, 2015.
68. HOU, F.; HONG, S. Characterization of R-curve behavior of translaminar crack growth
in cross-ply composite laminates using digital image correlation. Engineering Fracture
Mechanics, v. 117, 2014.
69. BECKER, T. H. et al. An approach to calculate the J-integral by digital image correlation
displacement field measurement. Fatigue and Fracture of Engineering Materials and
Structures, v. 35, p. 971-984, 2012.
70. LI, F. Z.; SHI, C. F.; NEEDLEMAN, A. A comparion of methods for calculating energy
release rates. Engineering Failure Analysis, v. 21, p. 405-421, 1985.
71. VAVRIK, D.; JANDEJSEK, I. Experimental evaluation of contour J integral and energy
dissipated in the fracture process zone. Engineering Fracture Mechanics, v. 129, 2014.
72. JANDEJSEK, I. et al. Analysis of standard fracture toughness test based on digital image
correlation data. Engineering Fracture Mechanics, 2017.
73. SCHEIDER, W. B. Numerical Aspects of the Path-Dependence of the J-Integral in
Incremental Plasticity. Institut für Werkstofforschung GKSS-Forschungszentrum
Geesthacht. [S.l.]. 2001.
74. KHOO, S. W.; KARUPPANAN, S.; TAN, C. S. A review of surface deformation and
strain measurement using two-dimensional digital image correlation. Metrology and
Measurement Systems, v. 23, n. 3, p. 461-480, 2016.
75. BLABER, J. DIC Algorithms. NCORR V1.2. Disponivel em:
<http://ncorr.com/index.php/dic-algorithms>.
76. LAVA, P. Practical considerations in DIC measurements MatchID: new spin-off
company of KULeuven. 10th International Conference on Advances in Experimental

107
Mechanics. Edinburgh: [s.n.]. 2015.
77. CRISTOFOLINI, G. L. A practical approach to optimizing the preparation of speckle
patterns for digital-image correlation. Measurement Science and Technology, v. 25,
2014.
78. CRAMMOND, G.; BOYD, S. W.; BARTON, D. Speckle pattern quality assessment for
digital image correlation. Optics and Lasers in Engineering, v. 51, p. 1368-1378, 2013.
79. BARRANGERA, Y. et al. Digital Image Correlation accuracy : influence of kind of
speckle and recording setup. Université de Poitiers. Chasseneuil. 2010.
80. HADDADI, H. Ã.; BELHABIB, S. Use of rigid-body motion for the investigation and
estimation of the measurement errors related to digital image correlation technique.
Optics and Lasers in Engineering, v. 46, p. 185-196, 2008.
81. PAN, B.; LU, Z.; XIE, H. Mean intensity gradient: An effective global parameter for
quality assessment of the speckle patterns used in digital image correlation. Optics and
Lasers in Engineering, v. 48, p. 469-477, 2010.
82. PAN, B. et al. Study on subset size selection in digital image correlation for speckle
patterns. Opt Express, v. 46, 2008.
83. HUA, T.; XIE, H. Evaluation of the quality of a speckle pattern in the digital image
correlation method by mean subset fluctuation. Optics & Laser Technology, v. 43,
2011.
84. LECOMPTE, D. et al. Analysis of speckle patterns for deformation measurements by
digital image correlation, 2006.
85. LECOMPTE, D. et al. Quality assessment of speckle patterns for digital image
correlation. Optics and Lasers in Engineering, v. 44, n. 11, p. 1132-1145, 2006.
86. ALEXANDER, T. L.; HERVEY, J. E.; WEEKS, A. R. Average speckle size as a
function of intensity threshold level: comparison of experimental measurements with
theory. Appl Opt, v. 33, 1994.
87. CARTER, J. L. W.; UCHIC, M. D.; MILLS, M. J. Impact of speckle pattern parameters
on DIC strain resolution calculated from in-situ SEM experiments. In: Fracture,
Fatigue, Failure, and Damage Evolution. [S.l.]: Springer, v. 5, 2014. p. 119-126.
88. ZHIYONG, W.; LI, L.; SHIBIN, W. Optimization of Speckle Size in Digital Image
Correlation Method. Department of Mechanical Engineering, Tianjin university.
Tianjin.

108
89. CUI, J. Influence of Subset Size, Shape and Orientation on Texture Based Digital
Image Correlation. Oregon State University. [S.l.]. 2014.
90. HUANG, Y. H. Development of digital image correlation method for displacement
and shape measurement. National University of Singapore. Singapore. 2004.
91. SUTTON, M. A.; ORTEU , J. J.; SCHEREIER, H. W. Image Correlation for Shape,
Motion and Deformation Measurements. [S.l.]: Springer, 2009.
92. SUN, Y. F. . P. H. L.; SUN, Y. F.; PANG, H. L. Study of optimal subset size in digital
image correlation of speckle pattern images. Optics and Lasers in Eng, 2007.
93. ZHANG, J. et al. Application of an improved subpixel registration algorithm on digital
speckle correlation measurement. Optics and Laser Tech, v. 35, 2003.
94. LECOMPTE, D. et al. Quality assessment of speckle patterns for digital image
correlation. Opt Lasers Eng, v. 44, n. 11, p. 1132-1145, 2006.
95. PANIN, S. V. et al. Automatic selection of a subset size at vector fields construction.
Materials Science and Engineering, v. 93, 2015.
96. KASVAYEE, K. A.; ELMQUIST, L. Development of a Pattern Making Method for
Strain Measurement on Microstructural Level in Ferritic Cast Iron. Processing and
Fabrication of Advanced Materials, 2014.
97. WANG, Y. et al. Investigation of the Uncertainty of DIC Under Heterogeneous Strain
States with Numerical Tests. Strain, v. 48, 2012.
98. LAVA, P. et al. Sources of systematic errors in the determination of heterogeneous
strain fields obtained via DIC. Proceedings of the SEM Annual Conference.
Indianapolis: [s.n.]. 2010.
99. ENFEDAQUE, A.; GALVEZ, J. C.; CIVIL, F. S. Analysis of fracture tests of glass fibre
reinforced cement (GRC) using digital image correlation. Construction and Building
Materials, v. 75, p. 472-487, 2015.
100
.
SUTTON, M. A. et al. Effects of subpixel image restoration on digital correlation error
estimates. Optics Eng., v. 27, 1988.
101
.
JERABEK, M.; MAJOR, Z. Strain determination of polymeric materials using digital
image correlation. Polymer Testing, v. 29, 2010.
102
.
HOULT, N. A. et al. Experimental accuracy of two-dimensional strain measurement
using digital image correlation. Eng. Structures, v. 46, 2013.
103 KANG, M. et al. Interpretation of quasi-static and dynamic tensile behavior by digital

109
. image correlation technique in TWinning Induced Plasticity (TWIP) and low-carbon steel
sheets. Materials Science & Engineering A, v. 693, 2017.
104
.
YU, L.; PAN, B. Single-camera high-speed stereo-digital image correlation for full-field
vibration measurement. Mechanical Systems and Signal Processing, v. 94, 2017.
105
.
LIUTKUS, T. J. Digital Image Correlation in Dynamic Punch Testing and Plastic
Deformation Behavior of Inconel 718. Ohio State University. [S.l.]. 2014.
106
.
GUSTAFSON, H. M.; CRIPTON, P. A.
Use of Digital Image Correlation to Investigate the Influence of Rate on Vertebral B
ody Response. IRCOBI Conference. [S.l.]: [s.n.]. 2016.
107
.
GILAT, A.; SEIDT, J. D. Dynamic Material Characterization Using Digital Image
Correlation. Applied Mechanics and Materials, v. 566, 2014.
108
.
YIN, Z. Q.; LI, X. B.; ZOU, Y. HS DIC-system application for strain and
displacement measurements under static-dynamic coupling loading. Anhui
University of Science and Technology. [S.l.].
109
.
REU, P. L.; MILLER, T. J. The application of high-speed digital image correlation.
Sandia National Laboratories. [S.l.]. 2008.
110
.
MURRAY, C. A.; HOULT, N. A. Dynamic measurements using digital image
correlation. International Journal of Physical Modelling in Geotechnics, 2016.
111
.
ZAPPA, E. Evaluation and improvement of digital image correlation uncertainty in
dynamic conditions. Politecnico di Milano. [S.l.]. 2013.
112
.
BEDSOLE, R. W.; BOGERT, P. B.; TIPPUR, H. V. An experimental investigation of
interlaminar and intralaminar dynamic fracture of CFRPs: Effect of matrix modification
using carbon nanotubes. Composite Structures, v. 132, p. 1043-1055, 2015.
113
.
GUO, X. et al. Dynamic deformation image de-blurring and image processing for digital
imaging correlation measurement. Optics and Lasers in Engineering, v. 98, 2017.
114
.
IRWIN, G. R. Analysis of Stresses and Strains Near the End of a Crack Traversing a
Plate. Journal of Applied Mechanics, v. 24, p. 361-364, 1957.
115
.
GRIFFITH, A. A. The Phenomena of Rupture and Flow in Solids. Philosophical
Transactions, Series A, v. 221, 1920.
116
.
RICE, J. R. A Path Independent Integral and the Approximate Analysis of Strain
Concentration by Notches and Cracks. Journal of Applied Mechanics, v. 35, 1968.
117 KOBAYASHI, A. S.; CHIU, S. T.; BEEUWKES, R. A numerical and experimental

110
. investigation on the use of J-integral. Engng Fract Mech, v. 5, 1973.
118
.
JANSSEN, M.; ZUIDEMA, J.; WANHILL, R. J. H. Fracture Mechanics. Second
Edition. ed. [S.l.]: Delft University Press, 2002. 136-154 p.
119
.
BAZANT, Z. P.; PLANAS, J. Fracture and size effect in concrete and other quasibrittle
materials. CRC Press LLC, 1997.
120
.
CATALANOTTI, G. et al. Determination of the mode I crack resistance curve of
polymer composites using the size-effect law. Engineering Fracture Mechanics, v. 118,
p. 49-65, 2014.
121
.
BAKKER, A. The three-dimensional J-integral: An investigation into its use for
post-yield fracture safety assessment. Delft University of Technology. [S.l.]. 1984.
122
.
NISHIOKA, T.; SHEN, S.; YU, J. Dynamic J integral, separated dynamic J integral and
component separation method for dynamic interfacial cracks in piezoelectric bimateriais.
International Journal of Fracture, v. 122, 2003.
123
.
ATKINSON, C.; ESHELBY, J. B. The flow of energy into the tip of a moving crack.
Journal of Fracture Mechanics, 1968.
124
.
FREUND, L. B. Energy flux into the tip of an extending crack in a elastic solid. Journal
of Elasticity, 1972.
125
.
FREUND, L. B. Dynamic Fracture Mechanics. [S.l.]: Cambridge University Press,
1989.
126
.
ATLURI, S. N. Path-indepent integrals in finite elasticity and inelasticity, with body
forces ,inertia and arbitrary crack-face conditions. Engineering Fracture Mechanics, v.
16, p. 341-364, 1982.
127
.
NISHIOKA, T.; ATLURI, S. N. Path-indepent integral , energy release rates and general
solutions near-tip fields in mixed mode dynamic fracture mechanics. Engineering
Fracture Mechanics, v. 1, p. 1-22, 1983.
128
.
NAKAMURA, T.; SHIH, C. F.; FREUND, L. B. Computational methods based on an
energy integral in dynamic fracture. International Journal of Fracture, v. 27, 1985.
129
.
NISHIOKA, T.; MURAKAMI, R.; TAKEMOTO, Y. The Use of the Dynamic J Integral
(J') in Finite-Element Simulation of Mode I and Mixed-Mode Dynamic Crack
propagation. Int. J. Pres. lies. & Piping, v. 44, 1990.
130
.
CHANG-CHUN, W.; PEIXIANG, H. Extension of J integral to dynamic fracture of
functional graded material and numerical analysis. Computers and structures, v. 80,

111
2002.
131
.
TEHRANI, P. H.; GODARZI, A. R. H.; TAVANGAR, M. Importance of the inertia term
in dynamic crack problems considering lord-shulman theory of thermoelasticity. Journal
of Thermal Stresses, v. 28, 2005.
132
.
Material Data Sheet. HexPly 8852 Product Data. [S.l.]. 2013.
133
.
KUHN, P. et al. MEasurement of fracture toughness for fiber compressive failure
mode of UD composites under high rate loading. ECCM17 - 17 th European
Conference on Composite Materials. Munchen: [s.n.]. 2016.
134
.
BLABER, J.; ADAIR, B.; ANTONIOU, A. Ncorr: Open-Source 2D Digital Image
Correlation Matlab Software. Experimental Mechanics, 2015.
135
.
SAVITZKY, A.; GOLAY, M. J. E. Smoothing and Differentiation of Data by Simplified
Least Squares Procedures. Analytical Chemistry, v. 36, p. 1627-1639, 1964.
136
.
CE, T. Fracture toughness and specific energy: a reanalysis of results. Materials Science
Engineering, v. 11, p. 275-282, 1973.
137
.
GURTIN, M. E. On a Path-Independent Integral for Thermoelasticity. International
Journal of Fracture, v. 15, 1979.
138
.
BLACKBURN, W. S. Path-Independent Integrals to Predict Onset of Crack Instability In
An Elastic Material". International Journal of Fracture Mechanics, v. 8, 1972.
139
.
ESHELBY, J. D. The energy momentum tensor in continuum mechanics, in. Inelastic
Behavior of Solids , 1970. 77-114.
140
.
CRISTOFOLINI, G. L. A. L. A practical approach to optimizing the preparation of
speckle patterns for digital-image correlation. Measurement Science and Technolog, v.
25, 2014.
141
.
KUNA, M. Finite Elements in Fracutre Mechanics. [S.l.]: Springer, 2012.
142
.
TAVARES, L. M. M. Planejamentos e Analise de Experimentos :PLANOS DE
EXPERIMENTOS DE UM FATOR. UFRJ. Rio de Janeiro.
143
.
CATALANOTTI, G.; CAMANHO, P. P. A semi-analytical method to predict net-tension
failure of mechanically fastened joints in composite laminates. Composite Scence andi
Technology, v. 76, p. 69-76, 2013.
144 GONZALES, G. L. G. et al. A J-integral approach using digital image correlation for

112
. evaluating stress intensity factors in fatigue cracks with closure effects. Theoretical and
Applied Fracture Mechanics, 2017.
145
.
ZUO, Z. et al. Orthotropy rescaling and implications for fracture in composites.
International Journal of Solids and Structures, v. 28, p. 235-248, 1991.
146
.
SHIH, C. F.; MORAN, B. Crack tip and associated domain integrals from momentum
and energy balance. Engineering Fracture Mechanics, v. 27, 1987.
147
.
SHIH, C. F.; MORAN, B.; NAKAMURA, T. Energy release rate along a three-
dimensional crack front in a thermally stressed body. International Journal of
Fracture, v. 30, 1986.
148
.
BRUST, F. W.; NAKAGAKI, M.; SPRINGFIELD, C. Integral parameters for thermal
fracture. Engineering Fracture Mechanics, v. 33, 1989.
149
.
SILLS, L. B.; DOLEV, O. The conservative M-integral for thermal-elastic problems.
International Journal of Fracture, v. 125, 2004.
150
.
AINSWORTH , R. A.; NEALE, B. K.; PRICE, R. H. Fracture Behavior in the
Presence of Thermal Strains. Conference on Tolerance of Flaws in Pressurized
Components. London: [s.n.]. 1978.
151
.
KISHIMOTO, A. S.; SAKATA, M. On the Path-Independent Integral - J. Engineering
Fracture Mechanics, v. 13, 1980.
152
.
ATLURI, S. N.; NISHIOKA, T.; NAKAGAKI, M. Incremental Path-Indepen- dent
Integrals in Inelastic and Dynamic Fracture Mechanics. Georgia Institute of
Technology Report. [S.l.]. 1983.
153
.
RICE, J. R.; BUDIANSKY, B. Conservation laws and energy release rates. J. Appl.
Mech., v. 40, p. 201-203, 1973.
154
.
BECKER, T. H. et al. An approach to calculate the -integral by digital image correlation
displacement field measurement. Fatigue Fract Engng Mater Struct, 2012.
155
.
CATALANOTTI, G.; XAVIER, J.; CAMANHO, P. P. Measurement of the compressive
crack resistance curve of composites using the size effect law. Composites: Part A, p.
300-307, 2014.
156
.
AMIT, K. C.; KIM, J. H. Interaction integrals for thermal fracture of functionally graded
materials. Engineering Fracture Mechanics, v. 75, 2008.
157
.
BAYAT, A.; MOHARAM, R. Numerical Analysis of explosion effects on the
redistribution of residual stresses in the underwater welded pipe. JCAMECH, v. 47, p.

113
121-128, 2016.
158
.
OKADA, H. Three-dimensional J-integral evaluation for cracks with arbitrary curvatures
and kinks based on domain integralmethod for quadratic tetrahedral finite element.
Engineering Fracture Mechanics, v. 109, 2013.
159
.
SHIVAKUMAR, K. N.; RAJU, S. I. Implementation of equivalent domain integral
method in the two-dimensional analysys of meed mode problems. NASA. [S.l.]. 1989.
160
.
GU, P.; DAO, M.; ASARO, R. J. A simplified method for calculating the crack-tip
field of functionally graded materials using the domain Integral. University of San
Diego. [S.l.]. 1999.
161
.
WILSON, W. K.; YU, I. W. The use of the J-integral in thermal stress crack problems.
International Journal of Fracture, v. 15, 1979.

114
8. ANEXO I
Histogramas do diâmetro de Feret e dos caminhos livres médios das manchas
Histogramas do Diâmetro das Manchas Histograma dos Caminhos Livres Médios

115

116
9. ANEXO II
Obtenção de dados com o software NCORR
Redirecionando para a parte pratica as etapas que permitem, através deste software, a
geração de todos os dados necessários para a análise são as seguintes:
- Inserção e carregamento da imagem inicial de referência, sendo considerada a
primeira imagem captada pela câmera, em relação à qual, serão calculados os deslocamentos e
deformações.
- Carregamento das imagens restantes captadas pela câmera até haver certeza de que a
ultima imagem corresponde à um momento posterior à falha.

117
- Definição da região de interesse (ROI), que é a região da imagem onde serão
analisados os dados. Tal fato foi realizado utilizando o software de edição de imagens GIMP,
com o qual se constrói o contorno da região de interesse de forma altamente detalhada e
minuciosa. As regiões são confeccionadas para a imagem de referência de cada amostra, e em
seguida, são exportadas para o NCORR durante a análise de amostra correspondente, para que
sejam de fato a zona de atuação da correlação digital de imagem.
- Escolha do raio do subconjunto e também do espacçamento entre os subconjuntos. Na
mesma etapa, ativa-se o truncamento do subconjunto, que auxilia em uma análise mais
adequada de pontos próximos à extremidades da região de interesse.

118
- Seleção das regiões de interesse, que no caso será única, e escolha do local das seeds
(sementes). Nota-se que o local de implantação destes deve ser simétrico em relação ao eixo
de simetria vertical da amostra. Assim que os seeds são implantados e os dados confirmados,
realiza-se a correlação dos deslocamentos.
- A seguir, realiza-se o cálculo das deformações presentes, em ambos os eixos. Para que isto
seja feito, deve ser selecionado o raio de deformação, que define a região de interpolação do
plano de deformação, o modo de deformação, que no nosso caso é o Lagrangiano. Também se
seleciona o modo de truncamento do subconjunto para, assim como anteriormente, auxiliar no
cálculo adequado de dados em zonas próximas às extremidades da ROI.

119
- Após o cálculo das deformações, tem-se todos os dados e gráficos necessários para o
desenvolvimento das teorias relacionadas à mecânica da fratura à serem feitas.
10. ANEXO III
Mapas de deslocamentos gerados pelo NCORR
A1
Deslocamentos Horizontais Deslocamentos Verticais
A2
Deslocamentos Horizontais Deslocamentos Verticais

120
A3
Deslocamentos Horizontais Deslocamentos Verticais
B1
Deslocamentos Horizontais Deslocamentos Verticais
B2
Deslocamentos Horizontais Deslocamentos Verticais
B3
Deslocamentos Horizontais Deslocamentos Verticais

121
C1
Deslocamentos Horizontais Deslocamentos Verticais
C2
Deslocamentos Horizontais Deslocamentos Verticais
D1
Deslocamentos Horizontais Deslocamentos Verticais
D2
Deslocamentos Horizontais Deslocamentos Verticais

122
D3
Deslocamentos Horizontais Deslocamentos Verticais
11. ANEXO IV
Mapas de deformação gerados pelo NCORR
A1
Deformação Horizontal Deformação Vertical
A2
Deformação Horizontal Deformação Vertical

123
A3
Deformação Horizontal Deformação Vertical
B1
Deformação Horizontal Deformação Vertical
B2
Deformação Horizontal Deformação Vertical
B3
Deformação Horizontal Deformação Vertical

124
C1
Deformação Horizontal Deformação Vertical
C2
Deformação Horizontal Deformação Vertical
D1
Deformação Horizontal Deformação Vertical
D2
Deformação Horizontal Deformação Vertical

125
D3
Deformação Horizontal Deformação Vertical












![CAHIER 10-2000 SIMULATION-BASED FINITE AND LARGE … · Pillai trace criterion [Bartlett (1939), Nanda (1950), Pillai (1955)] and the maximum root criterion [Roy (1953)].The literature](https://static.fdocument.pub/doc/165x107/5f06e33e7e708231d41a3b1b/cahier-10-2000-simulation-based-finite-and-large-pillai-trace-criterion-bartlett.jpg)