Autonomous Transportation and Deployment with Aerial...
31
Autonomous Transportation and Deployment with Aerial Robots for Search and Rescue Missions Markus Bernard Technische Universit¨ at Berlin Einsteinufer 17 10587 Berlin, Germany [email protected] Konstantin Kondak DLR (German Aerospace Center) Institute of Robotics and Mechatronics Muenchner Strasse 20 82234 Oberpfaffenhoffen-Wessling, Germany [email protected] Ivan Maza and Anibal Ollero ∗ Robotics, Vision and Control Group Universidad de Sevilla 41092 Seville, Spain {imaza}@us.es,{aollero}@cartuja.us.es Abstract It is generally accepted that systems composed of multiple aerial robots with autonomous cooperation capabilities can assist responders in many search and rescue (SAR) scenarios. In most of the previous research work, the aerial robots are mainly considered as platforms for environmental sensing and have not been used to assist victims. In this paper, outdoors field experiments of transportation and accurate deployment of loads, with single/multiple autonomous aerial vehicles are presented. This is a novel feature that opens the possibility to use aerial robots to assist victims during the rescue phase operations. The accuracy in the deployment location is a critical issue in SAR scenarios where injured people may have very limited mobility. The presented system is composed of up to three small size helicopters and features the * Also with the Center for Advanced Aerospace Technologies (CATEC), Parque Tecnol´ ogico y Aeron´ autico de Andaluc´ ıa, C. Wilbur y Orville Wright 17-19-21, 41309, La Rinconada, Spain. This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deployment with Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011 Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401
Transcript of Autonomous Transportation and Deployment with Aerial...

Autonomous Transportation and Deployment with
Aerial Robots for Search and Rescue Missions
Markus Bernard
Technische Universitat Berlin
Einsteinufer 17
10587 Berlin, Germany
Konstantin Kondak
DLR (German Aerospace Center)
Institute of Robotics and Mechatronics
Muenchner Strasse 20
82234 Oberpfaffenhoffen-Wessling, Germany
Ivan Maza and Anibal Ollero∗
Robotics, Vision and Control Group
Universidad de Sevilla
41092 Seville, Spain
{imaza}@us.es,{aollero}@cartuja.us.es
Abstract
It is generally accepted that systems composed of multiple aerial robots with autonomous
cooperation capabilities can assist responders in many search and rescue (SAR) scenarios.
In most of the previous research work, the aerial robots are mainly considered as platforms
for environmental sensing and have not been used to assist victims. In this paper, outdoors
field experiments of transportation and accurate deployment of loads, with single/multiple
autonomous aerial vehicles are presented. This is a novel feature that opens the possibility
to use aerial robots to assist victims during the rescue phase operations. The accuracy in
the deployment location is a critical issue in SAR scenarios where injured people may have
very limited mobility.
The presented system is composed of up to three small size helicopters and features the
∗Also with the Center for Advanced Aerospace Technologies (CATEC), Parque Tecnologico y Aeronautico de Andalucıa, C.Wilbur y Orville Wright 17-19-21, 41309, La Rinconada, Spain.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

cooperative sensing, using several different sensor types. The system supports several forms
of cooperative actuation as well, ranging from the cooperative deployment of small sen-
sors/objects to the coupled transportation of slung loads.
Within this paper the complete system is described, outlining the used hardware and soft-
ware framework, as well as the used approaches for modeling and control. Additionally,
the results of several flight field experiments are presented, including the description of
the worldwide first successful autonomous load transportation experiment, using three cou-
pled small size helicopters (conducted in December 2007). During these experiments strong
steady winds and wind gusts were present. Various solutions and lessons learned from the
design and operation of the system are also provided.
1 Introduction
Search and rescue takes many forms, each with its own unique risks and dangers to victim and responder
(Murphy et al., 2008). Urban search and rescue (USAR) has been the most studied form of SAR in the
robotics research community (Birk and Carpin, 2006; Gage et al., 2004; Poppinga et al., 2008; Murphy
and Stover, 2008; Micire, 2008; Arai et al., 2008) and has become familiar as recent natural and man-made
disasters have made the news the world over. On the opposite end of the spectrum, wilderness search and
rescue (WiSAR) often involves only few victims with a large geographic search region (Goodrich et al., 2008).
Systems composed of multiple robots with autonomous cooperation capabilities can assist responders in
both USAR and WiSAR scenarios. There are related projects dealing with multi-robot teams in emergency
situations such as the EMBER CMU project, which aims to assist first responders by providing tracking
information and coordination abilities. In EMBER, range information is used for searching and tracking of
mobile targets, using multiple robots (Hollinger et al., 2009). The multi-agent (combined ground and air)
tasking also have been demonstrated recently (Hsieh et al., 2007; Hsieh et al., 2008).
It is noteworthy, that in most of the research work, the aerial robots are mainly considered as platforms for
environmental sensing. However, they do not actuate to assist victims during the rescue phase operations.
The closest experimental approach to this concept found in the literature was the use of autonomous he-
licopters for the deployment and repairing of a wireless sensor network (Corke et al., 2004b; Corke et al.,
2004a).
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

In anticipation of the results presented in this paper it is stated, that the transportation and accurate
deployment of loads, with single/multiple autonomous aerial vehicles, have been successfully demonstrated
in outdoors field experiments. As it has been mentioned above, this is a novel feature that opens the
possibility to use aerial robots to assist victims during the rescue phase operations. For instance, it could be
possible to command such a transportation system to deploy medical kits, oxygen masks, satellite phones,
etc. in places very close to the victims. The accuracy in the deployment location is a critical issue in SAR
scenarios where injured people may have very limited mobility. The system can be very useful in flooding
disaster scenarios where hundreds of people are isolated on the roofs of their houses.
The joint transportation of a load by several ground robots has been an active subject of research and
development for many years. The coordinated control of the motion of the vehicles needs to consider the
involved forces. Thus, each robot could be controlled around a common compliance center attached to the
transported object. Assuming that each robot holds the object firmly, the trajectories of all robots determine
the trajectory of the object. Both centralized and decentralized compliant motion control algorithms have
been proposed, including the consideration of non-holonomic constraints (Kosuge and Sato, 1999). The
method has been implemented in an experimental system composed of three tracked mobile robots, equipped
with a force sensor. In (Sugar and Kumar, 1998) the decentralized control of cooperating mobile manipulators
is studied, whereat a designated lead robot is responsible for task planning. The control of each robot is
decomposed (mechanically decoupled) into the control of the gross trajectory and the control of the grasp.
The excessive forces due to robot positioning errors and odometry errors are accommodated by the compliant
arms. In (Borenstein, 2000) the Omnimate system, which uses a compliant linkage platform between two
differential drive mobile robots, is presented. In (Huntsberger et al., 2004) the distributed coordinated control
of two rovers, carrying a 2.5 meters long mockup of a photovoltaic tent, is presented and demonstrated as
an example of the CAMPOUT behavior-based control architecture.
The single-lift configuration, whereat a long rope couples one helicopter and one load, is the only configuration
commercially utilized for the transportation of slung loads. Several textbooks, see for example (Wagtendonk,
2006), provide information about the correct attachment of the slung loads and important safety procedures.
However, the manual maneuvering of a helicopter with an attached slung load is very difficult and requires a
skillful and experienced pilot. In particular the active damping of load oscillations is a difficult task, which
most pilots avoid. Instead the pilots stabilize only the helicopter and wait for the load oscillation to die down.
To support manual piloted slung load operations the iMAR GmbH and the German Aerospace Center DLR
developed the “iSLD-IVC” (iMAR Slung Load Damping based on inertial stabilized vision control) system,
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

which uses a artificial horizon instrument to guide the pilot. The authors are not aware of a completely
autonomous system for full size helicopters. The system presented in this work provides the full autonomous
control of single-lift slung load configurations (based on small size helicopters), including the active damping
of load oscillations.
The joint transportation of a single load by means of several helicopters has been also proposed in the
literature. In experiments with two manned, manual piloted helicopters it was determined that the control
of two coupled helicopters is a very challenging task, which emphasizes the need of automatic helicopter
stabilization. The motivation for using two or more small helicopters instead of one with bigger load capacity
are:
• In the case of real manned transport helicopters, the costs for two small helicopters are often less
than for one with double load capacity.
• Independent from the load capacity of the most advanced helicopters, there is always a task, which
requires more load capacity than provided by a single helicopter. In this case the control software
allows the coupling of the existing helicopters, in order to form a system with sufficient load capacity.
Particularly, research on lifting and transportation of loads by means of two helicopters (twin-lift, dual-lift)
was presented in e.g. (Mittal et al., 1991; Reynolds and Rodriguez, 1992). This research work has been
done only in simulation. Experimental results with a team of aerial robots to manipulate and transport
a payload in three dimensions via cables has been recently presented (Michael et al., 2010). The authors
propose two quality measures for motion plan design that minimize individual robot motion and maximize
payload stability along the trajectory. However, field experiments involving the lifting and transportation of
loads by means of autonomous aerial robots are not addressed in the literature.
In this paper field experiments, featuring the load transportation with one (single-lift) and three helicopters
(multi-lift), are presented. Ciolani and Kanning identify in their work 12 typical slung load configurations,
see (Cicolani and Kanning, 1992): Three single-lift configurations, four single-lift configurations using a twin-
rotor-helicopter, three dual-lift configurations and two multi-lift configurations. The orientation controller
proposed in our paper features a measurement based torque compensation and is applicable for single-,
dual- and multi-lift load transportation. Therefore, the theoretical results of this work are applicable to all
configurations presented by Ciolani and Kanning, except for the twin rotor helicopter configurations, which
require an adaptation of the used helicopter model.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

The described automatic control system allows the usage of one or multiple small size helicopters for slung
load transportation. The number of helicopters is configurable depending on capabilities of the helicopters
and the properties of the load to be transported.
The paper is structured as follows. Firstly, the physical system is described in Section 2. Then Section 3 is
devoted to the transportation of a single load by means of multiple coupled helicopters. Section 4 presents
field experiments with one and three helicopters. Finally, the lessons learned from the field experiments and
the conclusions close the paper.
2 Unmanned Aerial Vehicles Description
In Figure 1 one of the TUB-H UAVs, developed by the Technische Universitt Berlin and used for the
slung load transportation experiments is shown. The UAVs are based on commercially available small size
helicopters. The helicopters have a rotor diameter of 1.8m, a main rotor speed of approximate 1300 rpm
and are powered by a 1.8KW two-stroke engine. The UAVs can carry about 1.5 kg of additional payload,
whereat the weight of the UAV itself is 12.5 kg. The different components necessary to achieve autonomous
flight capabilities are mounted to the helicopters, using a frame composed of strut profiles. Through the use
of these profiles, the location of hardware components can be altered and new hardware can be installed
easily. This allows quick reconfiguration of the UAVs for different applications, easy replacement of defective
hardware and alteration of the position of different components to adjust the UAVs center of gravity. The
components necessary for autonomous operation are shown in Figure 1: A GPS, an IMU, a control computer
and a communication link. Due to the strong magnetic field of the engine a magnetic field sensor is mounted
on the tail.
The various payloads, necessary for the different experiments, were mounted to the same frame, composed
of strut profiles, which was already used to attach the components necessary for autonomous flight. The
following payloads were used during the different missions:
• Fixed visual and infrared cameras.
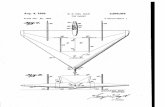
• A Deployment Device (DD) developed by the Technische Universitt Berlin (see Figure 2). The
functionality of the device is similar to the functioning of candy bar vending machines: A metal
grommet is attached to a small object (the payload) through a short wire. This grommet is attached
to the right end of a steel spring. A clockwise rotation of the spring moves the grommet (and the
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

MagneticCompass
GPS Antenna
IMU
Real-timecomputer
WiFi
GPS
LTD
RemoteControlReceiverAntenna
Figure 1: TUB-H UAV developed by the Technische Universitt Berlin used in the field experiments.
object) further onto the spring. This procedure allows the attachment of several small objects to the
helicopter. During the dropping maneuver the spring rotates counterclockwise until the rightmost
grommet is moved beyond the end of the spring and the object is released.
• The Load Transportation Devices (LTDs), which are specially designed for the transportation of
slung loads using one or more UAVs. The LTD (see Figure 3) is composed of a two axis cardan joint
with two magnetic encoders attached to each axis. After the joint a force sensor and the release
mechanism for the rope are attached. The release mechanism is composed of a bolt, which is inserted
into a tube. The bolt is fixed in the tube through a pin, which can be pulled out by a small motor, to
release the load. The release mechanism can be used for emergency decoupling of the load from the
UAV (and for the decoupling from the remaining UAVs), but also to release the load after successful
transportation. The magnetic encoders allow the measurement of the rope orientation relative to
the UAV fuselage. With this information and the measured rope force, it is possible to calculate the
torques and forces imposed on the UAV through the load (and/or the other coupled UAVs). This
information is used in the feedback loop of the compensator block C, see Section 3.3.
In Figure 4 the concept of the software system running on the UAV board computers is shown. The Real-Time
Base System is composed of multiple separate modules, which are connected by a Interprocess Communi-
cation and System Management Library (ICSML). The ICSML offers, among other features, convenient
interprocess communication methods, using a shared memory design and a event system for interprocess
notifications (e.g. on the change of shared memory variables). The driver modules are used to communi-
cate with the peripheral devices of the UAV, such as compass, IMU or GPS. The device specific protocol
is encapsulated in the driver process and the sensor data are presented to the remaining system through
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Rotation
Sensor
Buttons for
Manual Control
Node Deployment
Computer Interface
(a) Different components of the Deployment Device (DD) (b) DD loaded with several small objects (sensors in this photo-graph)
Figure 2: Detailed view of the Deployment Device (DD) developed by the Technische Universitt Berlin(TUB). It was used on-board the helicopter for missions that required the autonomous deployment of objects(sensors) in a given place.
ICSML as generalized objects. The controller of the system was designed and tested in simulation using
Matlab/Simulink. The RTBS provides a generic wrapper module, to embed C-Code generated by Mat-
lab/Simulink. This allows the fast implementation of new control algorithms and an error free transition
from Simulink models to real-time controller code. On the other hand, the executive layer module provides
the basic functionality needed to integrate the UAV with the rest of components of a SAR platform. This
includes the commanding of the UAVs, reporting of the command execution progress and the UAV state.
Additionally the executive layer module provides a certain level of hardware abstraction: The relative con-
figuration of the UAVs during the load transportation is part of the control loop and should not be altered
by the user of the platform (the coupled UAVs are presented as a single entity). This way the commanding
interfaces for coupled and uncoupled UAVs are equal both for the user and the possible autonomous decision
making software of the SAR platform.
3 Multi-UAV Load Transportation and Deployment
The transportation of loads using only one UAV is strongly limited by the payload capacity of the UAV itself.
Assuming the use of small size UAVs, this constraint may prevent the transportation and deployment of
loads required for a particular application (for example heavy communication equipment or first aid supplies
required for victims in search and rescue operations). The system designed allows the transportation of a
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Magnetic Encoder
Magnetic Encoder
Cardan Joint
ForceSensor
Motor
Rope Mounting
Bolt
Release Pin
(a) Different components of the Load Trans-portation Device (LTD)
(b) TUB-H helicopter equipped with the LTD on the landing pad
Figure 3: Detail of the Load Transportation Device (LTD) developed by the Technische Universitt Berlin(TUB). It was used on-board the helicopter for missions that required the autonomous transportation ofobjects to a given location.
single load by means of several helicopters. The number of helicopters is configurable, depending on the
capabilities of the helicopters and the load to be transported.
3.1 Modeling
The model of a small size helicopter is a key component for the behavior description of a system composed
of one or several helicopters, which are coupled to a load by means of ropes. We use the model presented
in our previous work (Kondak et al., 2006; Kondak et al., 2007). A small size model helicopter shows some
specific effects, which are not presented or are negligible small in case of the full-size helicopter and vice
versa. For that reason, it is impossible to use the models derived for full-size helicopters, see e.g. (Johnson,
1980), without any adaptation. Like pointed out in our previous work, the main differences between model
and full size helicopters in respect of modeling and control are:
• a higher main rotor to fuselage mass ratio
• a higher main rotor revolution speed (than most full-size helicopters)
• a very stiff main rotor without flapping hinges (almost all purchasable model helicopters)
Due to these differences, the inertial effects of the main rotor make a significant contribution to the rotational
dynamics of the system and can not be neglected. Therefore, the mechanical model should be considered as
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Driver Process IC
SMLDriver
Process ICSM
L
Real-Time Base System (RTBS)
sharedmemory
EmbeddedMatlabCode IC
SML Executive
LayerICSM
L
MW
InternalCommunication
ProcessICSM
L
Interprocess Communication and System Management
Library (ICSML)
eventsDriver Process IC
SML
Figure 4: Real-Time Base System (RTBS) composed of multiple separate modules, which are connected bya Interprocess Communication and System Management Library (ICSML).
composed of two rigid bodies: the main rotor and the fuselage. For the considered class of model helicopters,
the dominant component is the main rotor and not the fuselage. Unfortunately, the main rotor is very often
neglected in papers related to modeling and control of small-size helicopters and only one rigid body – the
fuselage – is accounted for in the dynamical equations.
The complete model of a model helicopter is composed of two main components: the mechanical model and
the model for generation of aerodynamic forces and torques. From experimental results with helicopters we
concluded that the generation of aerodynamic forces and torques, at least for the considered class of heli-
copters, can be approximated with simple algebraic relations (the corresponding time delay is approximated
by a simple first order delay). Therefore, the dynamics of one small-size helicopter or of a system composed
of several coupled helicopters are mostly determined by its mechanical model. The lifting forces FMR3 and
torques TMR1,2 generated by the main rotor of each helicopter, see Figure 5, and the forces FTR
2 (not shown
in Figure 5) generated by the tail rotors are considered to be abstract control inputs c.
Figure 5 illustrates the main problem caused by the external coupling of a load to a helicopter (using a rope).
The mechanical model of the helicopter is composed of two rigid bodies: the fuselage F and the spinning
main rotor MR. The load, denoted as mass point cmL, is connected to the helicopters fuselage by means of
a rope in the point r. The motion of the whole system is considered with respect to a Newtonian frame N .
The point cm is the center of mass (CoM) of the complete helicopter. For a real system it is difficult to place
the point r at the helicopter CoM cm, which causes the connecting vector pr−cm to be non zero. Therefore,
the rope force Fr causes a non zero torque Tr = Fr × pr−cm on the helicopter fuselage F . We have shown
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

1n3n
2n no
MR
F
N_rcm
p
1f
3f
2f
3
MRF
1
MRT
2
MRT
3
MRT
cm
r
Lcm
rFq
Figure 5: Mechanical model of the helicopter connected to the load. It is composed of two rigid bodies: thefuselage F and the spinning main rotor MR. For a real system it is difficult to place the point r at thehelicopter CoM cm, which causes the connecting vector pr−cm to be non zero.
in (Kondak et al., 2006; Kondak et al., 2007), that the rotation dynamics of the helicopter modeled as two
rigid bodies is complicated, but not coupled to the translation dynamics. Therefore, the equations of the
rotational dynamics depend only on generalized speeds describing the rotation of the helicopter. The lifting
force FMR3 generated by the main rotor is always approximately perpendicular to the main rotor plane.
This causes the translational accelerations to be completely described by the absolute value of FMR3 and the
orientation of the helicopter. Therefore, the relationship between rotation and translation dynamics, for a
single helicopter, can be expressed as follows: rotation ⇒ translation.
However, if one or several helicopters transport a load (each helicopter is connected to the load through one
rope), the rope force Fr and the torque Tr act on the fuselage of the helicopter. The torque depends on
orientation of the helicopter and its translational motion in the frame N (e.g. if helicopter and load are in
free fall, Fr and Tr are zero). This creates a more complicated relationship between the rotation and the
translation dynamics, for each helicopter: rotation ⇔ translation.
The translational and rotational motion of one particular helicopter has direct influence on the dynamics
of all other helicopters in the compound, if several helicopters are connected to a common load. Even a
translation with constant acceleration, e.g. to the right in the Figure 5, can cause oscillation of the angle θ,
between the rope and the helicopter axis.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
1.2
Frequency [Hz]
0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
1.2
Pow
er (
norm
aliz
ed)
Frequency [Hz]
0%25%50%75%100%
0%25%50%75%100%
Figure 6: Comparison of simulated (right) and measured (left, load mass 3.0Kg) rope oscillation. Thedata has been FFT transformed in order to identify the different oscillation frequencies. The color of thelines denote the position of the points where the data were recorded/simulated: blue line - LTD (0%), thegreen/red/cyan lines - 25%, 50% and 75% of the rope length and the purple line - at the load (100%).
The usage of an orientation controller, which was designed for an uncoupled helicopter, is problematic,
because of the strong mutual coupling between rotation and translation (even if the techniques for robust
control design were used). It is noteworthy, that in many practical cases the absolute value of the torque Tr
is similar or even larger than the values of torques needed to control the rotation of an uncoupled helicopter.
For the modeling we consider the general case, where n helicopters are connected to one common load. To
derive the dynamical equations of motion we used the Kane-method, see e.g. (Kane and Levinson, 1985),
which allows to generate the equations for systems with an arbitrary number of helicopters. The coupling
between helicopters and load is established by introducing one motion constraint (the rope length is constant
over time) for each helicopter in the compound. The resulting equations are used for control design as well
as for simulation. For more details on the modeling see (Kondak et al., 2007; Bernard and Kondak, 2010).
Currently the aerodynamics of the load and the ropes are neglected, but in future work, especially for flights
with high velocity, they will be considered.
3.2 Rope modeling
Two assumptions have been made implicitly, regarding the coupling between helicopter(s) and payload,
during the modeling: The ropes are rigid and massless and the Load Transportation Device (LTD), required
for the estimation of the load position, has no influence on the measurement itself. However, several real-
flight experiments have demonstrated that these assumptions are not always valid. Assuming normal flight
conditions, the ropes are tautened between helicopter(s) and the payload, similar to a string of a music
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

instrument. Therefore, external disturbances (like e.g. wind gusts) or high accelerations can stimulate a
natural oscillation of the ropes. We have observed this behavior in real flight experiments several times.
The load motion calculated from angle encoders during these oscillations does not correspond to the real
movement of the load. The oscillating angles lead to strong responses from the controller and in worst
case to the further excitation of the oscillations. To analyze these effects, the behavior of LTD, rope and
payload was studied in theory and in practical experiments. First, a model combined of LTD, rope and
payload was developed and validated in laboratory experiments. After this, the model was used to predict
the system behavior for different system parameters. The model consists of a series of 20 interconnected
pendulums, whereat the links connecting the mass-points are considered to be rigid and mass-less. The
topmost pendulum models the LTD, whereat the parameters (link length, mass) were chosen to reflect the
physical properties of the LTD. Similar, the payload is described by the bottommost mass-point and the
mass-points in between LTD and load constitute the flexible rope.
The theoretical model was verified in indoor experiments using a pendulum composed of the LTD, 0.9m
rope and loads of 1.5Kg, 3.0Kg and 4.5Kg. The pendulum was stimulated several times and the resulting
oscillation was recorded by the LTD sensors and a vision system. The vision system measured the motion of
the LTD and the load, as well as the rope motion at 25%, 50% and 75% of the rope length. Figure 6 shows
recorded experimental (left, load mass 3.0Kg) and simulation data (right). As it can be seen, experiments
and simulation match closely and three frequency peaks can be identified in the figure:
First the pendulum frequency, which can be calculated (approximated) for the stationary mounting point
(high helicopter/payload ratios) to be:
fpend = 1/(2π
√l/g
)= 1/
(2π
√0.9/9.81
)∼= 0.52Hz
Whereat l describes the rope length and g the gravitational acceleration. The actual frequency peak is
not visible in the figure, since it was truncated during normalization of the power spectrum. Second the
rope fundamental eigenfrequency, which is approximated using the theory of sound. The eigenfrequencies of
oscillating strings (e.g. a harp string) are calculated only from tension Ft, mass µ and length of the string l:
frope(n) = n(√
Ft/µ)/ (2 l)
Whereat for n = 1 the fundamental eigenfrequency and for n ≥ 2 the n′th harmonic of the fundamental
eigenfrequency are calculated. Assuming a load of 3.0Kg, a fundamental eigenfrequency of 27.4Hz is esti-
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

*
{1,2}iq
3
MR
iF
{1,2}
MR
iT
oriR
system:
helis+
load
1 Ftrans
RiF
-
*( )x t
( )x t
Figure 7: General control scheme for one or several helicopters coupled to a load. The outer loop performsthe translation control and the inner loop controls the orientation of each helicopter.
mated. And third the peak in the middle of the figure, which is a result of the LTD oscillation. The coupling
of the LTD to the rope shifts the frequency upwards towards the fundamental eigenfrequency of the rope.
Based on model predictions, coinciding with our experiences from real-flight experiments, the following
behavior, of the system composed of LTD, flexible rope and load, is estimated: With increasing load mass,
the rope fundamental eigenfrequency becomes much higher than the bandwidth of the closed loop system
and the helicopter does not respond to the oscillations. However, the rope length has more influence on the
rope eigenfrequency than the load mass and therefore for rope lengths of 5m/10m, even for the high load
mass of 4.5Kg, the eigenfrequency becomes 6.04Hz/3.02Hz. The helicopter controller will react to those
oscillations which can yield instabilities in the system (as it was observed in experiments). As a solution we
propose a model-based load motion observer, which will be presented in Section 3.4.
3.3 Controller design
The general scheme of the proposed control algorithm, for one or several helicopters coupled to a load, is
composed of two loops: The outer loop for translation control and inner loop to control the orientation of
each helicopter, see Figure 7.
The input of the control scheme in Figure 7 is the desired trajectory x∗(t) of the helicopters or of the load.
The translational motion of each helicopter is controlled in the outer loop by controller Rtrans. Using the
deviations from the desired trajectories the controller Rtrans calculates for each helicopter i the forces Fi,
which should be generated by its rotors. The helicopter i can realize the force Fi by adjusting the absolute
value of the main rotor lifting force FMRi3 and adjusting the orientation of the main rotor plane or fuselage
(described by the angles q∗i{1,2}). The desired orientation of the main rotor plane is controlled in the inner
loop by controller Rori. The values FMRi3 and q∗i{1,2} are calculated using algebraic relations in block F−1.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Like mentioned above, it is usually impossible to attach the rope directly to the center of mass of the
helicopter. This causes the rope force to create torques, which are imposed on the helicopter fuselage.
Therefore, the influence of the coupled system disturbs the helicopter orientation and makes the orientation
control a challenging task (Kondak et al., 2006; Kondak et al., 2007). The developed approach for the control
of coupled helicopters is based on the following three ideas:
• The design of the orientation controller (for each helicopter) accounts for the complete dynamics
(translational and rotational) of the whole system, all coupled helicopters and the load. This is
required due to the strong mutual coupling between translation and rotation of each helicopter and
the load.
• The usage of the force sensor in the ropes simplifies the design of orientation controller and makes
it robust against variations of system parameters and disturbances.
• The design of the translation controller is based on simplified model and accounts only for the
translational dynamics of the whole system. In this simplified model the helicopters and the load
are modeled as mass points. The model allows the application of arbitrary forces on each mass
point, which represents a helicopter. However, the generation of these forces is subjected to a linear
dynamic model, which reflects the force generation process of the helicopters.
The utilization of a force sensor in the rope is a key element of the proposed controller design. The measured
rope force is easily recalculated into resultant torques, acting on the helicopter fuselage. These torques are
used in the feedback loop of orientation controller. The usage of the force sensor signal in the feedback loop
has three main advantages:
1. the closed loop system becomes very robust against variation of system parameters and disturbances
2. the orientation controller design simplifies
3. the orientation controller does not depend on the number of helicopters connected to the load.
Like shown in (Kondak et al., 2007), the rotation dynamics of a uncoupled helicopter, modeled by rigid
bodies for fuselage and main rotor, are approximated by the following equations:
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

TMR1 +K12u2 +K11u1 = 0 (1)
TMR2 +K21u1 +K22u2 = 0 (2)
Where TMR1,2 are the torques generated around the longitudinal and lateral axes of the fuselage, u1,2 are
rotation speeds of the fuselage and the coefficients Kxx are constant parameters of the helicopter and of the
main rotor speed. We assume that the influence of the rotation around the vertical axis (rotation speed u3)
on u1,2 is small and can be considered as disturbance. This assumption is valid, if u3 is kept close to zero or
on constant values. This is achieved by an additional tail rotor controller, with much smaller a time constant
than the time constant of the orientation controller for u1,2. Equations (1, 2) are coupled through u1,2. This
coupling leads to high frequency oscillations (for the parameters of a typical small size helicopter) once the
system has been stimulated. The control scheme of roll and pitch angles q1,2 for an uncoupled helicopter
is shown in Figure 8. The blocks shown against a gray background denote the model of helicopter. The
rotation kinematics are represented by the block Q and the rotation dynamics, described by Eqs. (1), (2),
are represented by the block W. The controller is composed of blocks Q−1, D and two feedback loops with
gains Ku, Kq for rotation speeds u1,2 and orientation angles q1,2 respectively. Desired rotational rates are
calculated from the angular errors e1,2 (interpreted as required Euler angle rates), using the controller block
Q−1 of the inverse rotation kinematics. The block D of the controller is used to decouple the plant between
TMR1,2 and u1,2. The decoupling can be performed by means of known techniques from linear control theory,
e.g. using a matrix composed of compensating transfer functions. This orientation controller shows a good
performance and robustness in simulation and real flight experiments, for different types of helicopters, like
described in (Kondak et al., 2006; Kondak et al., 2007).
Like discussed above, the motion of the whole system has strong influence on the rotational dynamics of
the coupled helicopters. To account for this influence, block D should be replaced by the inverse rotational
dynamics D, not of a single helicopter, but of the whole system (considering both, the rotation and translation
of each helicopter). Utilizing this new block D, the orientation controller for a helicopter coupled to a load
shows equal performance as the orientation controller with block D for an uncoupled helicopter, considering
nominal values of all system parameters ρi.
It was shown in simulation, that the orientation controller based on the inversion block D for a coupled
helicopter (unlike block D for a uncoupled helicopter) is quite sensitive to variation of the system parameters
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

1T
W
1q
1u
Q
6u
1u
D2
u2
T
uK
1Q
qK
1q
*
1q
uK
qK
2q
2q
*
2q
2u
--
- 1e
2e
-
rF
1,2,3q
-
-
2rT
1rTC
*
1u
*
2u
Figure 8: Scheme for the orientation control. The resulting controller is composed of the orientation controllerfor an uncoupled helicopter and a compensator block C.
ρi (5% variation could be critical). To overcome this problem, we propose to use a force sensor in the rope.
The measured rope force Fr is used to calculate the influence of the coupled system on the rotational
dynamics of the helicopters. This influence is expressed by the torque Tr = Fr × pr−cm, where pr−cm is
the position vector, connecting the rope attachment point r and helicopter CoM. The resulting orientation
controller is composed of the orientation controller for an uncoupled helicopter and a compensator block C,
see Figure 8. The block estimates the disturbance torques Tr1, Tr2 and subtracts them from the torques
calculated by the orientation controller. The usage of the compensator C allows to decouple the orientation
control for each helicopter from the rest of the system. This makes the use of the same orientation controller,
independent of the number of coupled helicopters, possible.
There are two reasons for the robustness of the proposed orientation controller: First, the compensation is
independent from the mass of the load and the length of the rope, since the actual influence of the load
on the fuselage is measured through Fr. Second, as long as the orientation of the helicopter is known, the
calculated compensation torque is always in the correct phase.
The details of the presented control algorithms can be found in (Kondak et al., 2006; Kondak et al., 2007;
Bernard and Kondak, 2009; Bernard and Kondak, 2010).
3.4 Load Motion Observer
Oscillations of LTD and rope disturb the motion estimation of the load, like explained in Section 3.2.
Therefore, a direct estimation of the load motion based on the measured LTD angles is not feasible. The
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

0 1 2 3 4 5 6 7 8
−0.2
−0.1
0
0.1
0.2
angl
e [r
ad]
time [s]
MeasurementButterworthObserver
Figure 9: Comparison of simulated and measured rope oscillation. The black line represents an anglemeasured by the LTD, the gray dashed line is the angle after application of a 4’th order Butterworth low-pass filter (cutoff frequency fc = 2Hz) and the gray line corresponds to the result of the developed observer.
expected oscillation frequency of the undisturbed load motion is very low (0.52Hz assuming a rope length
of 0.9m). Therefore, a very simple solution, the low-pass filtering of the measured angles, was applied.
Figure 9 shows an angle measured by the LTD (black line) and the angle after application of a 4’th order
Butterworth low-pass filter (gray dashed line, cutoff frequency fc = 2Hz). The gray-line corresponds to the
result of an observer and is explained later. The disturbance (between 3 s and 5 s) has still strong influence
on the filtered angle. Additionally, the filtered angle clearly exhibits a large time delay, if it is compared to
the measurement.
Therefore, an observer based estimation has been implemented and tested. First we used a linear observer
based on the flexible rope model, described in Section 3.2, with a high number of mass points for the rope
approximation. This observer converges quickly to the state of the simulated model (the model is observable),
but unfortunately it is very sensitive to parameter variations. Assuming that the rope length differs by 0.1m
or the load mass differs by 0.1 kg the observer is not converging. Therefore, a different approach was tested:
The observer was calculated using the simplified model for the controller design. In this model the ropes
are simplified to be rigid and massless. The resulting observer is robust against parameter variation and
converges quickly to the motion of the undisturbed pendulum. Movements besides the pendulum frequency
of 0.52Hz are effectively filtered out by the observer. Once again Fig. 9 is used to compare the performance
of the observer to the filter and the direct measurement. The angle estimated by observer exhibits less
sensitivity to the disturbance (between 3 s and 5 s) than the filtered angle. Additionally, the observed angle
has only a small time delay. In fact, after the observer converged no time delay is visible compared to the
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

measured angle.
The observer was tested several times in real-flight experiments. Strong steady winds and wind gusts were
present during the experiments and demonstration conducted in May 2009, see Section 4. Despite these bad
environmental conditions several load transportation experiments were conducted successfully. To cross-
check its functioning one experiment was conducted without observer, using the angles directly measured
by the LTD. The experiment needed to be aborted almost immediately, since the rope oscillations caused a
very strong reaction of the controller. These experiments proved the necessity and the functional efficiency
of the observer.
4 Validation in Field Experiments
The work presented in this section has been conducted within the framework of the AWARE Project1
funded by the European Commission (June 2006 – September 2009). The researchers from the University
of Seville led a consortium of five Universities (Technical University of Berlin and Universities of Seville,
Bonn, Stuttgart and Twente) and three companies (Selex Sensors and Airborne Systems, Flying-Cam and
the Iturri Group) from five European countries.
The general objective of the project was the design, development and demonstration of a platform composed
of heterogeneous systems, which are able to operate in a distributed manner in disaster management scenarios
without pre-existing (or with damaged) infrastructure (Maza et al., 2011). Thus, the platform comprises
self-deployment capabilities (in particular the autonomous transportation and deployment of different load
types, like small sensors, cameras, communication equipment, etc.) using one or several small size helicopters.
The systems integrated in the platform include aerial robots, wireless sensor networks, ground fixed cameras
and ground vehicles with actuation capabilities.
The TUB-H UAVs were used several times in different experiments, with various payloads such as infrared
and/or visual cameras, the DD and the LTD. Configurations with single and multiple UAVs have been tested
for the transportation and deployment of objects in search and rescue scenarios. A selection of these field
experiments is described in the following.
1http://www.aware-project.net
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

(a) One TUB-H autonomous helicopterdropping a sensor
0 50 100 150 200 250 300 350 400 450 500-40
-30
-20
-10
0
10
20
30
40
time [s]
UAV XUAV YUAVZ
Node deploymentposition [m]
(b) The hovering above the deployment position begins at 160 secondsand ends at 300 seconds. During that time span the UAV descends,deploys the node and accents again, while maintaining the hovering po-sition in the x/y-plane, with a precision of 0.4 meters
Figure 10: Sensor dropping operation by the TUB-H autonomous helicopter equipped with the DD.
4.1 Sensor Dropping
During search and rescue operations it could be required the deployment of additional light objects, such as
small sensors or communication devices in specific locations around the affected area. Within the framework
of the AWARE project, a number of missions involving the deployment of small wireless sensors were carried
out. In Figure 10, the sensor deployment using one TUB-H UAV is shown. The hovering above the
deployment position begins at 160 seconds and ends at 300 seconds. During that time span the UAV
descends, deploys the node and ascends again, while maintaining the hovering position in the x/y-plane,
with a precision of 0.4 meters. In the z-axis a deviation of one meter was recorded, which is more than twice
the deviation of the x- and y-axis. The reasons were wind gusts of 50 km/h occurring during the flight. In
these experiments the gain of the altitude controller was reduced in order to reduce mechanical stress of the
helicopters flying under such harsh conditions. As a result, the winds gusts are able to lift the helicopter up
or push it down about one meter, until the height controller is able to compensate.
4.2 Slung Load Transportation using a Single UAV
The flight data shown in Figure 11 was recorded on 27 May 2009 in Spain. The plot shows a flight step
of 5 meters and one of 15m, another step of 30m was omitted in order to avoid detail loss (caused by the
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

(a) Single TUB-H autonomous heli-copter transporting a load
0 20 40 60 80 100 120 140 160 180 200 220-2
0
2
4
6
8
10
12
14
16 UAVx
UAVy UAVzload xload yload z
position [m]
time [s]
(b) The plot shows a flight step of 5 meters and one of 15 meters, anotherstep of 30 meters was omitted in order to avoid detail loss (caused by thecoarse scaling of the axis)
Figure 11: Slung load transportation using one UAV.
coarse scaling of the axis). For this experiment a single helicopter equipped with the Load Transportation
Device (LTD) is used. A jerry can, connected to the LTD using a rope, is transported by the helicopter over
a distance of 5 and 15m. The rope was five meters long and the weight of jerry can was 1.1 kg. During the
experiment wind gusts of 30 km/h were measured, which introduced repeated displacement of the load.
During the experiment the load position observer was successfully tested. The position of the load is required
in order to stabilize the load and is calculated using the angles measured by LTD. During flight, the rope is
normally taut between the helicopter fuselage and the load. If animated by external influences (e.g. by wind
gusts) the rope begins to oscillate like a string of a music instrument. The purpose of the load observer is to
estimate the position of the load, while rejecting oscillations introduced into the rope itself. Two experiments
were conducted: The first without the observer, to prove that these rope oscillations occur during real flight
experiments and the second with the observer, to prove that the load position observer provides a working
solution to the problem. While the first experiment needed to be aborted, due to the strong controller
response to the oscillation of the rope, in the second experiment the observer damped the rope oscillations
and preserved the motion of the load.
During hovering, wind gusts of 30 km/h led to damped oscillations of the load, with maximum amplitude
of 0.5 meters. For real world applications this is a good value, considering the weather conditions. Due
to the bowing of the rope caused by wind, only an approximate estimation of the absolute load position is
possible. For example, an error of 5◦, caused by the bowing of the rope, causes a deviation 0.44m from the
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

real position (for a rope length of 5m). For real world applications two solutions exist: First, the use of
additional sensors to estimate the position of the load (e.g. vision based estimation) and second the manual
placement of the load by the UAV operator, where the operator changes the UAV position step by step,
until the load is directly above the desired position. The manual placement is favorable whenever the exact
GPS position of the placement location is unknown and can not be measured before take off. In that case
the helicopter operator uses visual feedback of the deployment process, to maneuver the load to the desired
position.
4.3 Load Transportation with Multiple UAVs
The first successful experiment was conducted by the authors in Berlin, December 2007 2. For these flight
experiments three identical helicopters as described in Section 2 were used. The helicopters are equipped
with a multi-UAV modular autopilot system developed at TUB. The rope is attached to the helicopter by
means of the Load Transportation Device (LTD), which is mounted between the landing skids. A load of
4 kg was transported by means of three helicopters. In this experiment ropes with a length of 13m were
used. The helicopters were arranged as a equilateral triangle on the ground, with a distance of 8m between
the helicopters. In Figure 12 the coordinates of all three helicopters during the whole flight are shown.
The xh123 and yh123 coordinates describe the horizontal motion of the helicopters and the zh123 coordinates
describe the vertical motion. The coordinates of the helicopters are shown in different ground fixed frames,
which have the same orientation, but different origins (take-off position of each helicopter), therefore there
are no offsets between the helicopter trajectories. The mapping of helicopters and line colors is ambiguous.
This is acceptable, since the motions of the helicopters are only discussed together and not individually.
The load was lifted when the helicopters reached approximate 12.4 meters. The weight of the load was not
considered in the controller and therefore a small disturbance in the zh123 trajectories can be observed at
the moment the load was lifted from the ground as well as during strong acceleration in x, y−direction. A
position error of each helicopter in hovering was approx. ±0.3m. During the whole flight the triangular
formation of the helicopters with a precision of about ±0.3 meters and the load was moved very smoothly.
To our knowledge these were the very first successful flight experiments to transport a load using multiple
autonomous helicopters.
Another experiment was carried out in May 2009, within the scope of the AWARE disaster scenario demon-
stration: A fire alarm had been declared in a building and the objective was to place a wireless camera with
2http://www.youtube.com/watch?v=tl6DYWNe9ac
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

0 20 40 60 80 100 120 140 160 180 200−15
−10
−5
0
5
10
15
20
time [s]
dist
ance
[m]
load on the ground
xh123
zh123
load in the air
yh123
Figure 12: Motion of three helicopters transporting one load of 4 kg. The load was lifted when the heli-copters reached approximate 12.4 meters. The coordinates of the helicopters are shown in different groundfixed frames, which have the same orientation, but different origins (take-off position of each helicopter),therefore there are no offsets between the helicopter trajectories. The xh123 and yh123 coordinates describethe horizontal motion of the helicopters and the zh123 coordinates describe the vertical motion.
pan-tilt on the top floor. The camera could provide continuous real-time video to monitor the operations
of the firemen and the health status of the victims on the roof of the building. Several coupled helicopters
were required for this task, since the camera, together with its associated communication equipment and
batteries, was too heavy for a single helicopter. To the best of the authors knowledge, this was the first
field experiment involving the transportation of a load from the ground to the roof of a building with three
autonomous helicopters. Different videos with the live execution of the mission are included in Table 1.
The experiment was executed as follows: The Load Transportation System (LTS), composed of three TUB-H
helicopters and the coupled payload, was ready for operation and the helicopters were waiting on the three
take-off and landing pads. The platform user specified a load transportation task to deploy the wireless
pan-tilt camera on the top floor and a plan builder module generated the full set of ordered tasks for the
LTS.
It should be noted that the enormous complexity of the load transportation system composed by three
helicopters was hidden to the user, who only needed to specify the deployment task, by providing the desired
GPS location of the load deployment. The altitude specified for the deployment was several meters above
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

-10
0
10
20
30
40
50
60
-60-40-200204060
X (
South
to N
ort
h)
[m]
Y (East to West) [m]
Rope
Building
Tent
UAV3
UAV1
LoadUAV2
Tent
Figure 13: Path followed by the three helicopters transporting the load in the x− y plane. The trajectoriesof the load and the helicopters are in black and gray respectively. The arrow indicates direction of the loadtransportation. The formation of the helicopters was a equilateral triangle, with a distance of 8m betweenthe helicopters.
the top floor of the building. The autonomous decision-making software of the platform had access to the
map of the area in order to plan the deployment task decomposition properly, taking also into account the
length of the ropes.
Figure 13 shows a 2-D view of the trajectories followed by the three TUB-H helicopters and the transported
pan-tilt camera unit. The formation of the helicopters was similar to the formation used for the experiment
conducted on December 2007: A equilateral triangle, with a distance of 8m between the helicopters. The
weight of the payload composed of camera, transportation housing and batteries was approximately 5Kg.
The trajectories of the helicopters are plotted in gray and the trajectory of the camera is plotted in black.
The estimated rope positions are plotted as gray lines, whereat a time step of one second elapsed between
two successive estimations. The arrow indicates direction of the load transportation. It is noteworthy, that
despite the stormy weather conditions, the load stayed clearly within the extends of the roof during the
deployment.
Figure 14 complements the flight data presented in Figure 13, by depicting the values of the x, y and z
coordinates of the helicopters and the load during the flight. The motion of the load is depicted from the
moment the load was lifted off the ground to the moment it was deployed on the roof. The coordinates of each
helicopter and the load are given relative to one global Newtonian reference frame, but for each helicopter
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Figure 14: Values of the x, y and z coordinates of the helicopters (left) and the load (right) during theflight. The coordinates of each helicopter and the load are given relative to one global Newtonian referenceframe, but for each helicopter and for the load the coordinates were plotted with respect to a relative origin(the take off position of the respective helicopter or the lift-off position of the load). The trajectories of thehelicopters show almost no deviation relative to each other.
and for the load the coordinates were plotted with respect to a relative origin (the take off position of
the respective helicopter or the lift-off position of the load). The mapping of helicopters and line colors
is ambiguous, but similar to Figure 12 the motions of the helicopters are only discussed together. The
trajectories of the helicopters show almost no deviation relative to each other. Therefore, the helicopters
preserved their relative formation during the whole flight. To demonstrate the robustness of the translation
controller, the additional weight of the load was neglected during the experiment. Therefore, in the interval
[120 s, 140 s] the strong acceleration of the helicopters caused a height deviation. However, beside this
deviation no additional side effects were noticeable. During the return flight [240 s, 260 s], after the load
deployment, no disturbance of the height is visible. It should be mentioned that during the execution, wind
gusts around 35 km/h were registered. Therefore, the performance of the coupled load transportation system
is considered very good.
Several photographs of the LTS during the execution of the mission are shown in Figure 15. A fourth
helicopter used to acquire airborne video footage of the mission can be seen in two pictures. Finally,
Figure 16 contains a screenshot of the human machine interface application captured during the execution,
as well as one image transmitted from the transported camera once it had been deployed on the top of the
building.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Figure 15: Three UAVs transporting a pan-tilt wireless camera to the roof of a building with a height of 12meters in Utrera (Spain) in May 2009. The images show the mission during the take off (topmost picture),during the actual load transportation (middle-left picture), shortly before (middle-right picture) and shortlyafter the load deployment (bottommost picture). On two pictures a fourth helicopter is visible, which wasused to acquire airborne video footage of the mission.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

(a) Map of the area with the position and heading of the three LTS helicopters represented by arrows. Images transmittedby a fourth helicopter and telemetry from all the UAVs
(b) Camera deployed on the top floor of the building. The op-erator has used the pan-tilt to find one victim. The LTS is stillover the deployment location after releasing the ropes
Figure 16: Screenshot of the platform human machine interface during the execution of the load trans-portation mission in 2009. The different elements in the interface were: (left) map of the area with theposition and heading of the three LTS helicopters represented by arrows; (center) images transmitted byanother helicopter and telemetry from all the UAVs ; (right) interface to control the transported camerawith pan-tilt.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

5 Conclusions and Lessons Learned
The experiments, conducted within the AWARE demonstration in 2009, imposed high availability require-
ments on all involved subsystems. For two reasons this was particularly true for the autonomous helicopters:
First, the helicopters were the designated platform for the transportation (and deployment) of various sen-
sors and therefore they were involved in almost every experiment. Second, the experiments included the
demonstration of LTS, which requires the simultaneous operability of three helicopters. Therefore, several
preventive measures were taken to ensure the successful conduction of the experiments. The complexity of
these measures ranged from simple (like the regular maintenance of the helicopters or the availability of spare
parts) to complex (like the adherence to pre-flight checks/procedures or the possibility to adapt hard- and
software in the field, towards the requirements of the experiment or the actual environmental conditions).
Especially the adaptability of hard- and software has been proven useful during the experiments:
The combustion engine of a helicopter exhibited signs of imminent failure during the conduction of a exper-
iment. Therefore, the experiment was aborted immediately and the helicopter was landed safely. Then, in
order to proceed with the experiment as fast as possible, the payload was mounted to a different helicopter.
The modular design of the system components, in combination with the strut profile mounting frame (de-
scribed in Section 2 of this document), allowed the quick relocation of the payload to a different helicopter
and the resumption of the experiments.
The adverse weather conditions with high wind speeds (≥ 25 km/h) and strong wind gusts (≥ 35 km/h),
particularly during the last days of the AWARE project experiments, required the adaption of the helicopter
controller. It was possible to operate the helicopters during these bad weather conditions, although the
controller was optimized for the operation during medium wind speeds (≤ 20 km/h). The controller was able
to quickly compensate the displacements of the helicopter (caused by the wind gusts). However, the helicopter
was operating close to its performance limit and the strong reactions of the controller caused unnecessary
high stress on rotors, mechanic and engine. Therefore, the control coefficients of the height controller were
relaxed, which allowed the helicopter to be lifted up or to be pushed down (±1m) by the wind gusts. This
measure strongly reduced the stress on the helicopter and improved the precision of the remaining two
position coordinates. In Section 4.1 an experiment, utilizing the modified controller coefficients, is described.
The controller coefficients were modified online during a single test flight, whereat the Matlab/Simulink
external mode interface was utilized, see Section 2 for a description of the software system. Without the
possibility of online parameter modification, it would have required several test flights until good parameter
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

would have been found. Using the Matlab/Simulink interface it was possible to upload different controller
coefficients and directly monitor the improvements achieved by a particular set of coefficients. Therefore,
only a single flight of approximately 10 minutes length was required for the adaption of the coefficients, and
the schedule of planned experiments was only insignificantly delayed.
The examples above have been chosen, since they clearly demonstrate the benefits of the excellent system
adaptability. However, beside these examples the importance of the system adaptability was witnessed
several times during the field experiments. Therefore it is possible to conclude, that adaptability of the
system was a key element required for the successful completion of the field experiments.
The paper has presented the multi-UAV load transportation system, which requires the consideration of
physical interactions between the aerial robots. The multi-UAV architecture developed in the AWARE
project allows different levels of interaction among the UAVs and between the UAVs and the environment,
including both sensing and actuation. Particularly, the paper has presented results obtained in the AWARE
project demonstrating the lifting and transportation of a slung load by means of one helicopter and also by
three coupled helicopters, which has been the first demonstration of this challenging application.
The proposed methods open many different new opportunities in missions involving the cooperation of
multiple UAVs for applications such as search and rescue and interventions in disaster management and civil
security. The transportation of loads by means of the UAVs can be also considered as a first step toward
the cargo transportation by means of UAVs or even toward the evacuation of people in SAR operations.
Acknowledgments
This work was partially supported by the AWARE Project (IST-2006-33579) funded by the European Com-
mission under FP6, and also by the ROBAIR Project (DPI2008-03847) funded by the Spanish Research and
Development Program.
6 Appendix A: Index to Multimedia Extensions
Table 1 shows the index to the different videos of the load transportation mission carried out in 2009 in the
framework of the AWARE Project.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Table 1: Index to Multimedia ExtensionsExtension Media Type Description1 Video Load transportation mission with multiple UAVs
(ground camera view)2 Video Load transportation mission with multiple UAVs
(transported wireless camera view)3 Video Load transportation mission with multiple UAVs
(human machine interface view)4 Video AWARE project summary video (including load
transportation)
References
Arai, M., Tanaka, Y., Hirose, S., Kuwahara, H., and Tsukui, S. (2008). Development of “souryu-iv” and
“souryu-v”: Serially connected crawler vehicles for in-rubble searching operations. Journal of Field
Robotics, 25(1–2):31–65.
Bernard, M. and Kondak, K. (2009). Generic slung load transportation system using small size helicopters.
In Proceedings of the IEEE International Conference on Robotics and Automation, pages 3258–3264,
Kobe, Japan.
Bernard, M. and Kondak, K. (2010). Load transportation system based on autonomous small size helicopters.
Aeronautical Journal, 114(1152):191–198.
Birk, A. and Carpin, S. (2006). Rescue robotics – a crucial milestone on the road to autonomous systems.
Advanced Robotics Journal, 20(5):595–695.
Borenstein, J. (2000). The OmniMate: A guidewire- and beacon-free AGV for highly reconfigurable appli-
cations. International Journal of Production Research, 38(9):1993–2010.
Cicolani, L. S. and Kanning, G. (1992). Equations of motion of slung-load systems, including multilift
systems. Technical report, NASA Ames Reserach Center.
Corke, P., Hrabar, S., Peterson, R., Rus, D., Saripalli, S., and Sukhatme, G. (2004a). Autonomous deploy-
ment and repair of a sensor network using an unmanned aerial vehicle. In Proceedings of the IEEE
International Conference on Robotics and Automation, pages 3602–3608, New Orleans, USA.
Corke, P., Hrabar, S., Peterson, R., Rus, D., Saripalli, S., and Sukhatme, G. (2004b). Deployment and
connectivity repair of a sensor net with a flying robot. In In Proceedings of the 9th International
Symposium on Experimental Robotics, Singapore.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Gage, A., Murphy, R., Rasmussen, E., and Minten, M. B. (2004). Shadowbowl 2003: Lessons learned from
a reachback exercise with rescue robots. IEEE Robotics & Automation Magazine, 11(3):62–69.
Goodrich, M. A., Morse, B. S., Gerhardt, D., Cooper, J. L., Quigley, M., Adams, J. A., and Humphrey, C.
(2008). Supporting wilderness search and rescue using a camera-equipped mini UAV. Journal of Field
Robotics, 25(1–2):89– 110.
Hollinger, G., Singh, S., Djugash, J., and Kehagias, A. (2009). Efficient multi-robot search for a moving
target. International Journal of Robotics Research, 28(2):201–219.
Hsieh, M. A., Chaimowicz, L., Cowley, A., Grocholsky, B., Keller, J. F., Kumar, V., Taylor, C. J., Endo, Y.,
Arkin, R. C., Jung, B., Wolf, D. F., Sukhatme, G., and MacKenzie, D. C. (2007). Adaptive teams of
autonomous aerial and ground robots for situational awareness. Journal of Field Robotics, 24(11):991–
1014.
Hsieh, M. A., Cowley, A., Kumar, V., and Taylor, C. J. (2008). Maintaining network connectivity and
performance in robot teams. Journal of Field Robotics, 25(1-2):111– 131.
Huntsberger, T. L., Trebi-Ollennu, A., Aghazarian, H., Schenker, P. S., Pirjanian, P., and Nayar, H. D.
(2004). Distributed control of multi-robot systems engaged in tightly coupled tasks. Autonomous
Robots, 17(1):79–92.
Johnson, W. (1980). Helicopter Theory. Dover Publications, Inc.
Kane, T. and Levinson, D. (1985). Dynamics: Theory and Applications. McGraw-Hill Book Company.
Kondak, K., Bernard, M., Losse, N., and Hommel, G. (2006). Elaborated modeling and control for au-
tonomous small size helicopters. In ISR/ROBOTIK 2006 Joint conference on robotics, Munich, Ger-
many.
Kondak, K., Bernard, M., Meyer, N., and Hommel, G. (2007). Autonomously flying VTOL-robots: Modeling
and control. In Proceedings of the IEEE International Conference on Robotics and Automation, pages
2375 – 2380, Rome, Italy.
Kosuge, K. and Sato, M. (1999). Transportation of a single object by multiple decentralized-controlled
nonholonomic mobile robots. In Proceedings of the IEEE International Conference on Intelligent Robots
and Systems, volume 3, pages 1681–1686, Kyongju, Korea.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401

Maza, I., Caballero, F., Capitan, J., de Dios, J. M., and Ollero, A. (2011). A distributed architecture for
a robotic platform with aerial sensor transportation and self-deployment capabilities. Journal of Field
Robotics, 28(3):303–328.
Michael, N., Fink, J., and Kumar, V. (2010). Cooperative manipulation and transportation with aerial
robots. Autonomous Robots, pages 1–14. 10.1007/s10514-010-9205-0.
Micire, M. J. (2008). Evolution and field performance of a rescue robot. Journal of Field Robotics, 25(1-
2):17–30.
Mittal, M., Prasad, J. V. R., and Schrage, D. P. (1991). Nonlinear adaptive control of a twin lift helicopter
system. IEEE Control Systems Magazine, 11(3):39–45.
Murphy, R., Tadokoro, S., Nardi, D., Jacoff, A., Fiorini, P., Choset, H., and Erkmen, A. (2008). Springer
Handbook of Robotics, chapter Search and Rescue Robotics, pages 1151–1173. Springer Verlag.
Murphy, R. R. and Stover, S. (2008). Rescue robots for mudslides: A descriptive study of the 2005 La
Conchita mudslide response. Journal of Field Robotics, 25(1-2):3– 16.
Poppinga, J., Birk, A., and Pathak, K. (2008). Hough based terrain classification for realtime detection of
drivable ground. Journal of Field Robotics, 25(1-2):67– 88.
Reynolds, H. K. and Rodriguez, A. A. (1992). H∞ control of a twin lift helicopter system. In Proceedings of
the 31st IEEE Conference on Decision and Control, pages 2442–2447, Tucson, USA.
Sugar, T. and Kumar, V. (1998). Decentralized control of cooperating mobile manipulators. In Proceedings
of the IEEE International Conference on Robotics and Automation, volume 4, pages 2916–2921, Leuven,
Belgium.
Wagtendonk, W. (2006). Principles of Helicopter Flight. Aviation Supplies & Academics, Inc.
This is a preprint of an article published in Journal of Field Robotics: Autonomous Transportation and Deploymentwith Aerial Robots for Search and Rescue Missions, Markus Bernard, Konstantin Kondak, Ivan Maza, Anibal
Ollero, Journal of Field Robotics, Volume 28, Issue 6, pages 914931, October 2011, Copyright 2011Wiley-Blackwell). Available online on Wiley-Blackwell’s website: http://dx.doi.org/10.1002/rob.20401