Autonomous Motion Planning for Daily Tasks in Human ... Autonomous Motion Planning for Daily Tasks...
11
1 Autonomous Motion Planning for Daily Tasks in Human Environments using Multiple Collaborating Robots Masayuki Inaba, Kei Okada, Rosen Diankov JSK Lab. Department of Mechano-Informatics The University of Tokyo PR2 Beta Program Workshop 2010/5/24 – 2010/5/28
Transcript of Autonomous Motion Planning for Daily Tasks in Human ... Autonomous Motion Planning for Daily Tasks...

1
Autonomous Motion Planning forDaily Tasks in Human Environments using Multiple Collaborating Robots
Masayuki Inaba, Kei Okada, Rosen DiankovJSK Lab.Department of Mechano-InformaticsThe University of Tokyo
PR2 Beta Program Workshop2010/5/24 – 2010/5/28
2
3
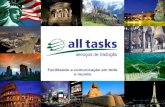
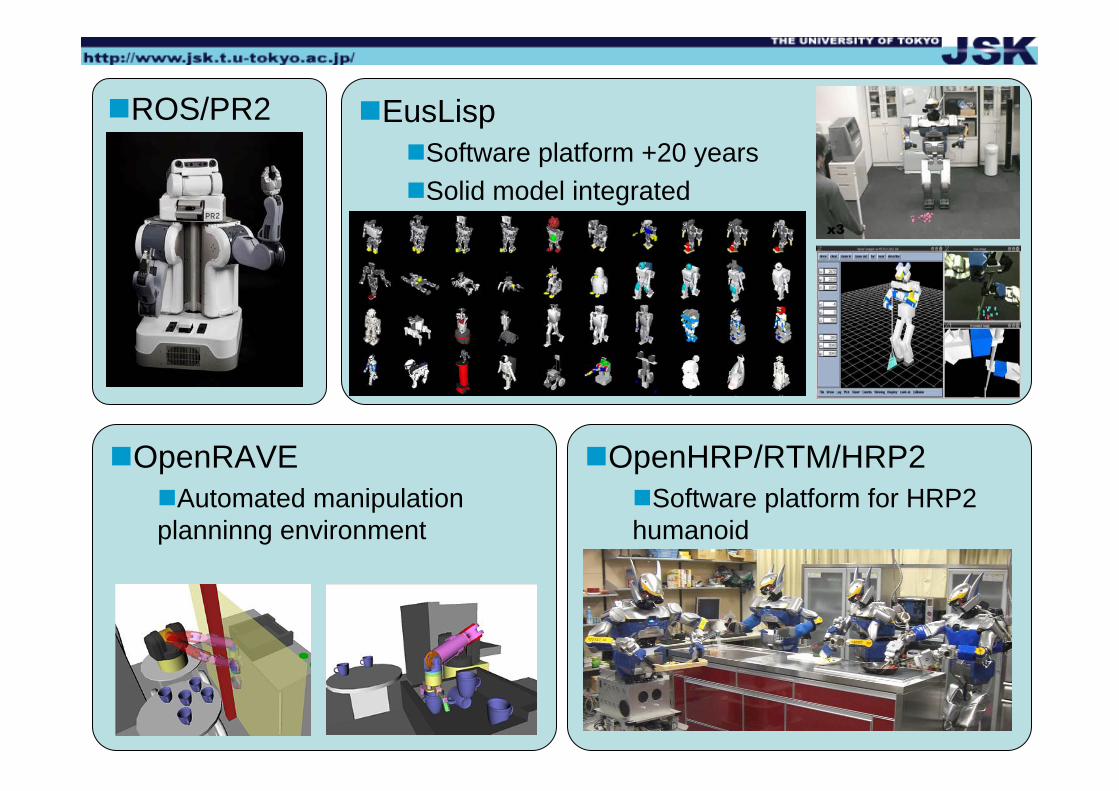
ROS/PR2
OpenHRP/RTM/HRP2Software platform for HRP2
humanoid
OpenRAVEAutomated manipulation
planninng environment
EusLispSoftware platform +20 yearsSolid model integrated

4
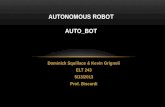
JSK Robotics Lab
1980 1990 2000 2010
COSMOS:CognitiveSensorMotor Operation
Studies1981 H. Inoue
AssistiveHumanoid
2002 K. Okada
H6 & H7 Humanoid1999 S. Kagami,
K.Nishiwaki
Musculoskeletal2000 I. Mizuuchi
COSMOS: Lisp-based Robot System Integration Environment
Vision-Based Robotics: Manipulation, Interaction, Navigation
HARP: Humanoid Autonomous Robot Project H1-H7
Remote-Brained Robotics: about 60 robots
Sensor Suit Sensor Flesh
Musculoskeletal Humanoid
HRP2 Integration
Remote-Brained Robotics
1993M. Inaba
Sensor flesh robots2006 T. Yoshikai
5
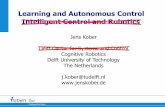
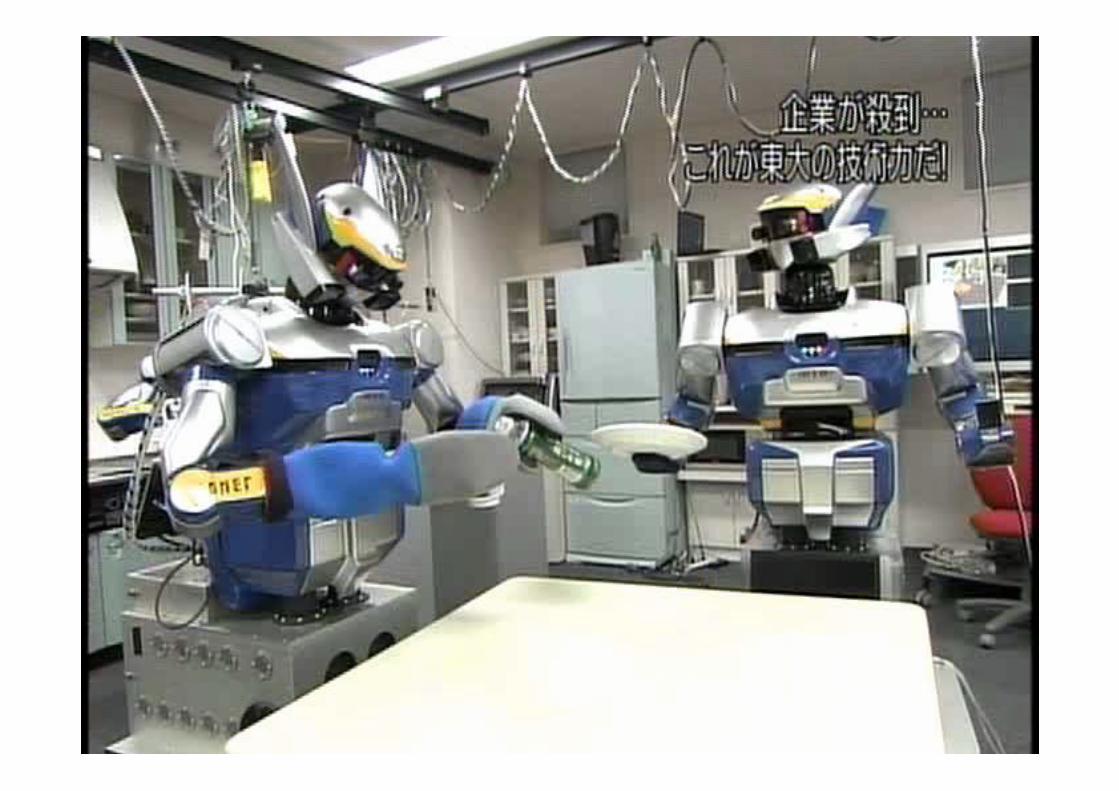
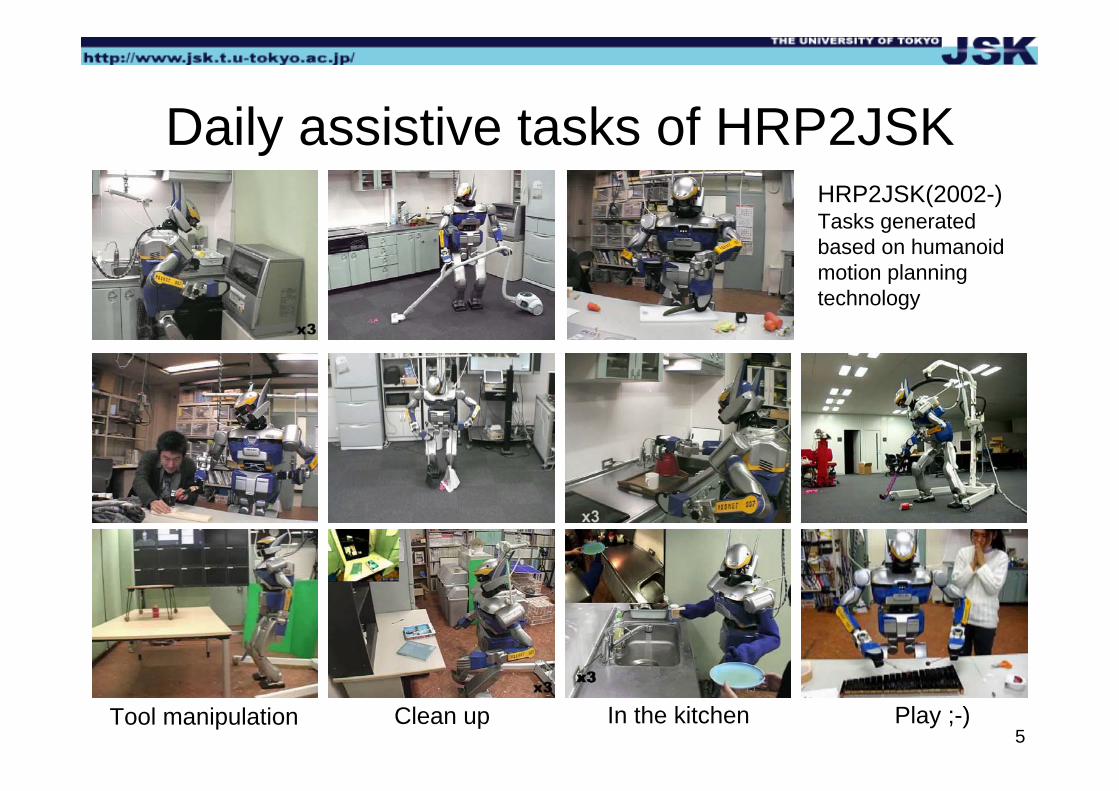
Daily assistive tasks of HRP2JSKHRP2JSK(2002-)Tasks generated based on humanoid motion planning technology
Tool manipulation Clean up In the kitchen Play ;-)

6Extending EusLisp systemw/ perception/dynamics
Torque aware planningConnecting task planning, motionplanning and vision base behaviors
Sensor skin
Movable object recognition and manipulation
Driving wheel chairs
Human-humanoid interaction integrating multiple cues
Human behavior observation
Whole body behavior generation
Soft fleshwith sensors
Dendon drivenrobtos
Learning to open doors
7
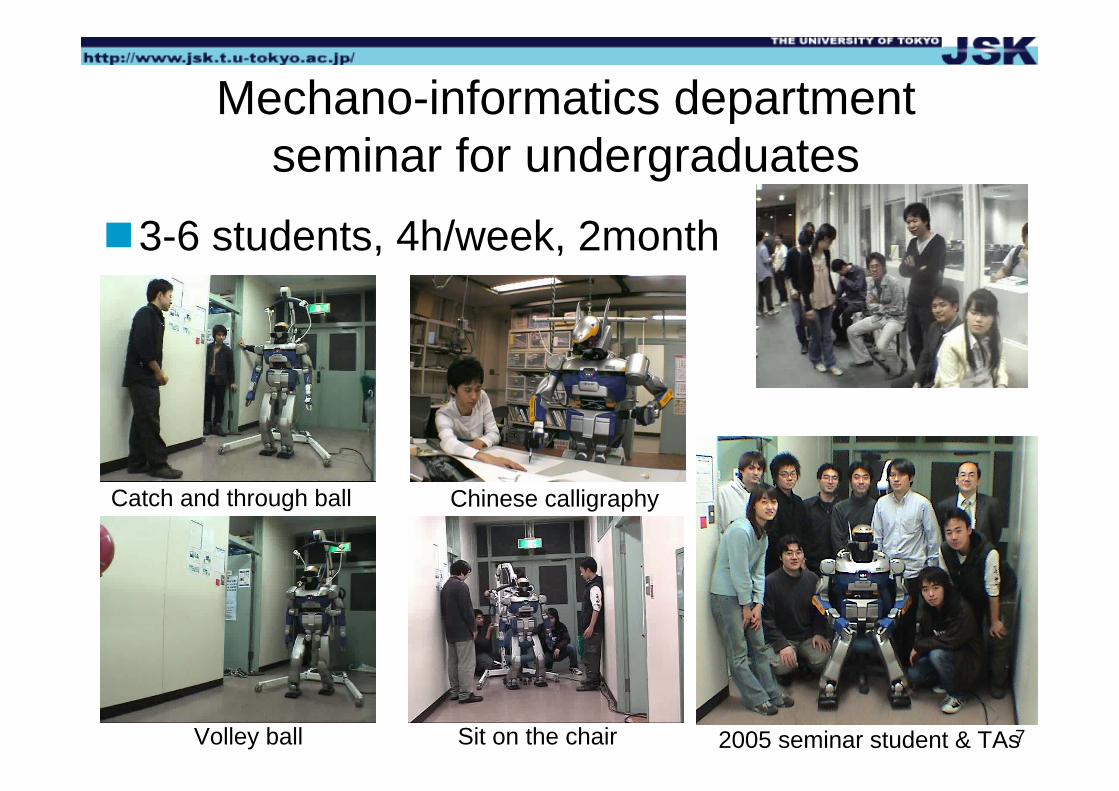
Mechano-informatics departmentseminar for undergraduates
3-6 students, 4h/week, 2month
Volley ball
Catch and through ball
Sit on the chair
Chinese calligraphy
2005 seminar student & TAs

8
9
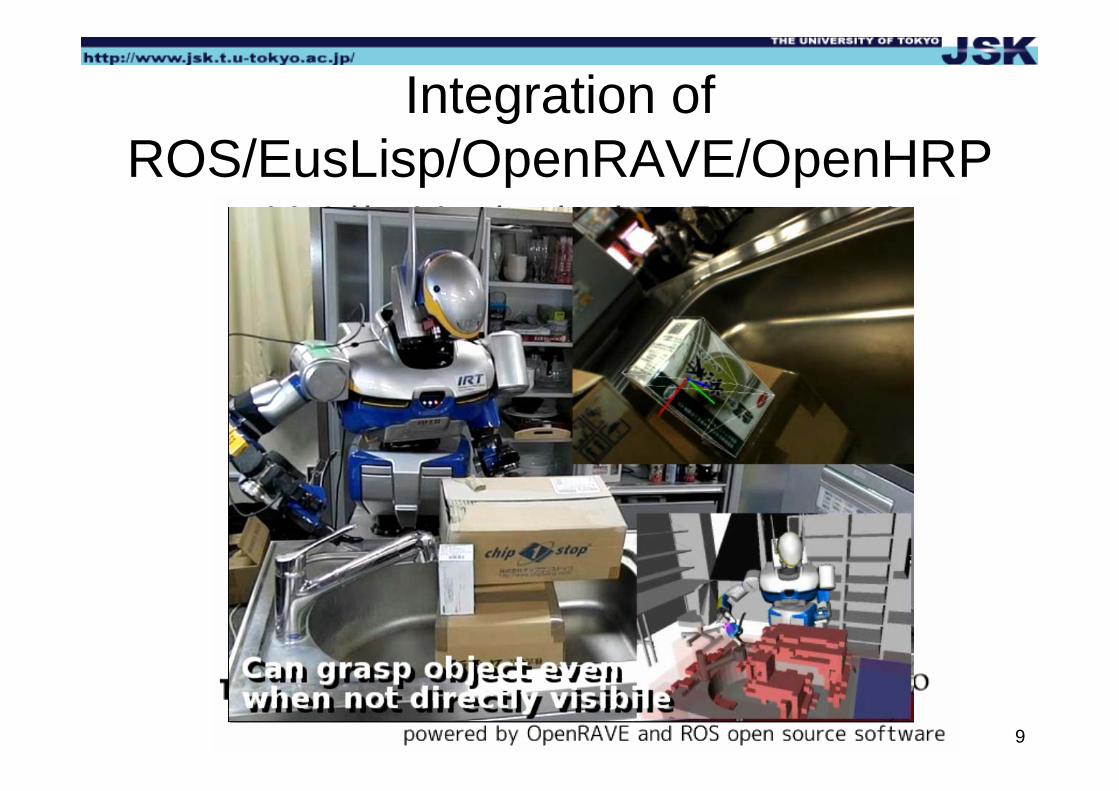
Integration of ROS/EusLisp/OpenRAVE/OpenHRP
10
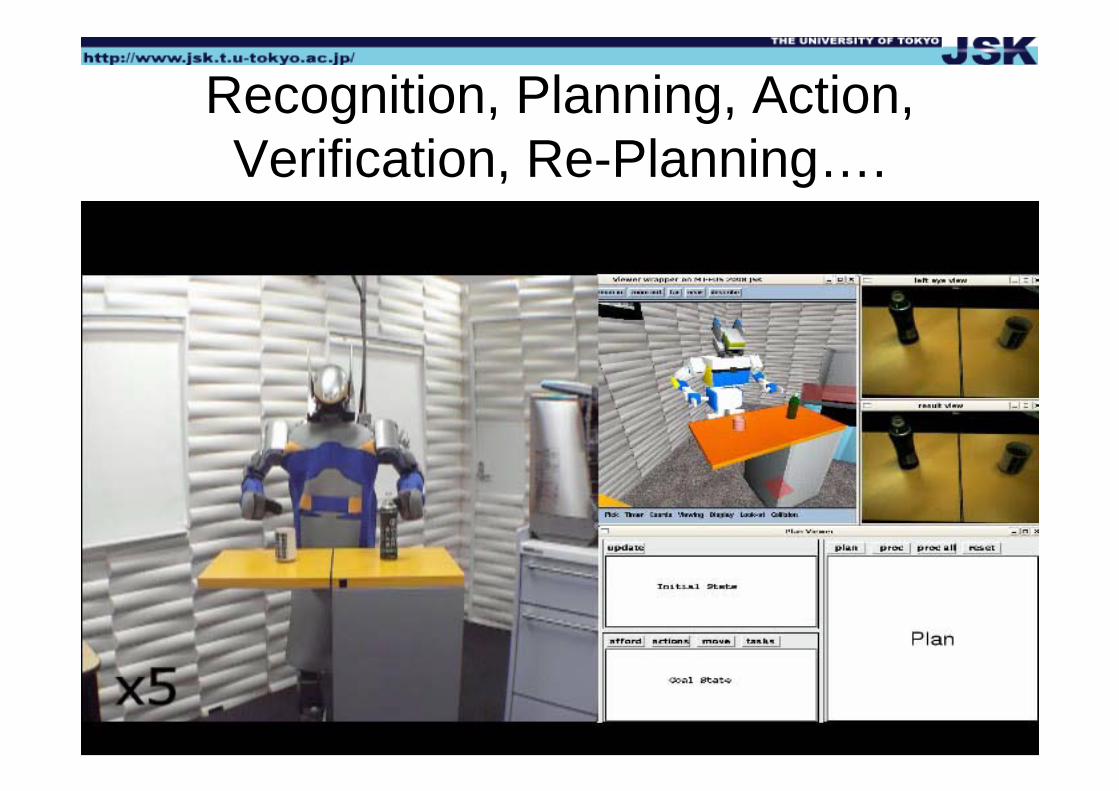
Recognition, Planning, Action, Verification, Re-Planning….

11
Thanks!Participants
Manabu Saito: service robotsRyohei Ueda : task planningYohei Kakiuchi : environment manipulationRosen Diankov : motion planningKei Okada : robotics system jsk-ros-pkg@sourceforge