
asu.ugatu.ac.ruasu.ugatu.ac.ru/library/95/ac975e3f1b27a6850555d...Web viewЛабораторная...
22
Лабораторная работа № 7. Программируемый логический контроллер Fatek. Распределенная система управления с релейным регулятором 1. Цель работы Изучение принципов построения распределенных систем управления на базе программируемого логического контроллера (ПЛК) FATEK FBs-20MC и SCADA-системы TRACE MODE 6. 2. Задачи Создание программ взаимодействия контроллера FATEK FBs-20MC с объектом управления через модули аналогового ввода и аналогового вывода с помощью среды программирования WinProLadder. Изучение принципов обмена данными в распределенных системах управления на основе протоколов MODBUS. Изучение функций MODBUS для передачи данных в ПЛК и чтения данных из ПЛК. Изучение приемов программирования обмена данными с ПЛК с помощью SCADA-системы TRACE MODE 6. 3. Теоретическая часть 3.1. Процессы регулирования с двухпозиционным законом Двухпозиционные регуляторы обеспечивают хорошее качество регулирования для инерционных объектов с малым запаздыванием, не требуют настройки и просты в эксплуатации . Эти регуляторы представляют обычный и наиболее широко распространенный метод регулирования. Структурная схема двухпозиционной системы регулирования приведена на рис. 7.1. Рис. 7.1. Структурная схема двухпозиционной системы регулирования
Transcript of asu.ugatu.ac.ruasu.ugatu.ac.ru/library/95/ac975e3f1b27a6850555d...Web viewЛабораторная...
Лабораторная работа № 7. Программируемый логический контроллер Fatek. Распределенная
система управления с релейным регулятором
1. Цель работы
Изучение принципов построения распределенных систем управления на базе программируемого логического контроллера (ПЛК) FATEK FBs-20MC и SCADA-системы TRACE MODE 6.
2. Задачи
Создание программ взаимодействия контроллера FATEK FBs-20MC с объектом управления через модули аналогового ввода и аналогового вывода с помощью среды программирования WinProLadder. Изучение принципов обмена данными в распределенных системах управления на основе протоколов MODBUS. Изучение функций MODBUS для передачи данных в ПЛК и чтения данных из ПЛК. Изучение приемов программирования обмена данными с ПЛК с помощью SCADA-системы TRACE MODE 6.
3. Теоретическая часть
3.1. Процессы регулирования с двухпозиционным законом
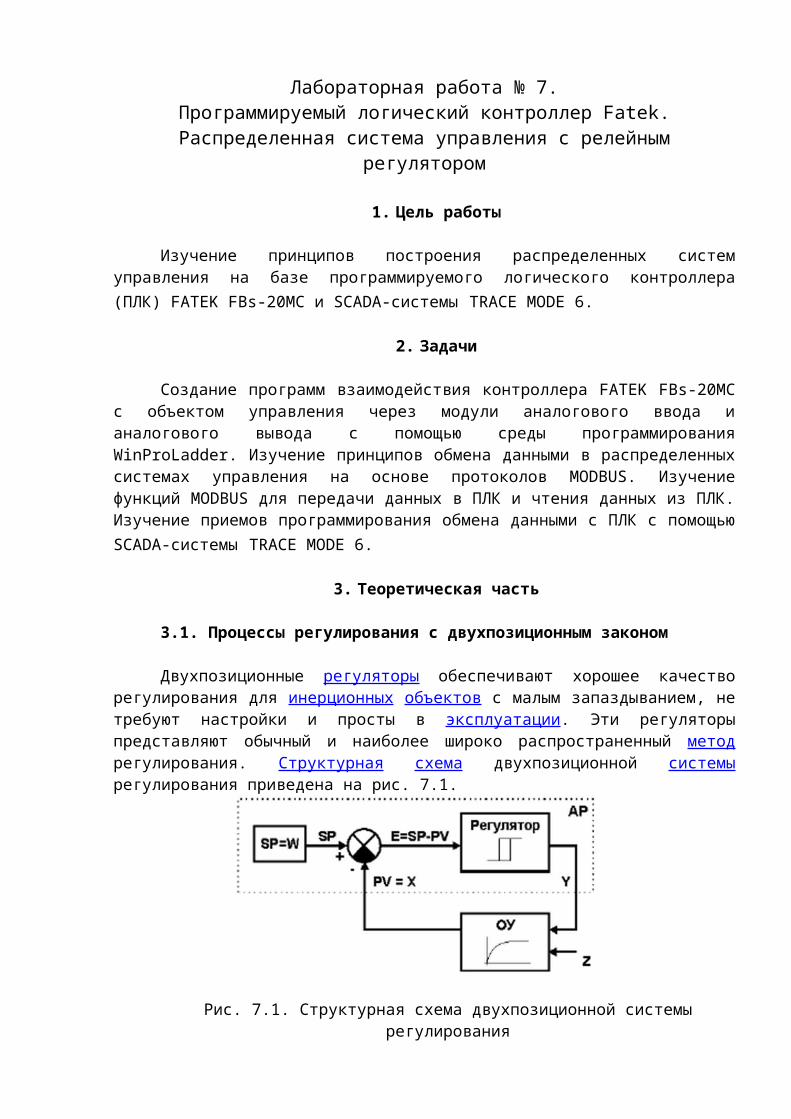
Двухпозиционные регуляторы обеспечивают хорошее качество регулирования для инерционных объектов с малым запаздыванием, не требуют настройки и просты в эксплуатации. Эти регуляторы представляют обычный и наиболее широко распространенный метод регулирования. Структурная схема двухпозиционной системы регулирования приведена на рис. 7.1.
Рис. 7.1. Структурная схема двухпозиционной системы регулирования
Обозначения на рис. 7.1: АР – двухпозиционный регулятор,ОУ – обьект управления,SP – узел формирования заданной точки (задания),Е – рассогласование регулятора,PV=X – регулируемая величина,Y – управляющее воздействие,Z – возмущающее воздействие.
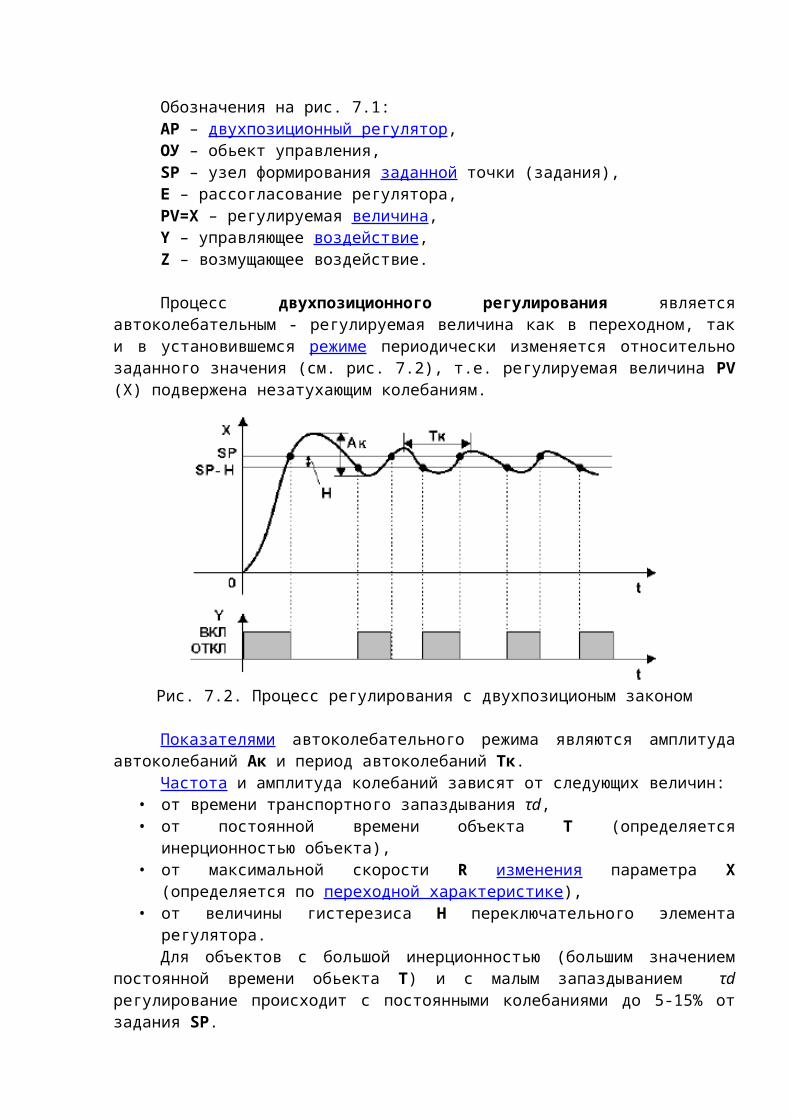
Процесс двухпозиционного регулирования является автоколебательным - регулируемая величина как в переходном, так и в установившемся режиме периодически изменяется относительно заданного значения (см. рис. 7.2), т.е. регулируемая величина PV (X) подвержена незатухающим колебаниям.
Рис. 7.2. Процесс регулирования с двухпозиционым законом
Показателями автоколебательного режима являются амплитуда автоколебаний Ак и период автоколебаний Тк.
Частота и амплитуда колебаний зависят от следующих величин:• от времени транспортного запаздывания τd,• от постоянной времени объекта Т (определяется инерционностью объекта),• от максимальной скорости R изменения параметра Х (определяется по
переходной характеристике),• от величины гистерезиса H переключательного элемента регулятора.
Для объектов с большой инерционностью (большим значением постоянной времени обьекта Т) и с малым запаздыванием τd регулирование происходит с постоянными колебаниями до 5-15% от задания SP.
Чем больше гистерезис Н, отношение τd/Т, R - тем больше амплитуда колебаний Ак.
Чем больше время запаздывания τd и постоянная времени обьекта Т - тем больше период колебаний Тк (см. рис. 7.2).
К достоинствам двухпозиционных микропроцессорных регуляторов относятся:
• простота использования и простота настройки регулятора на обьекте регулирования,
• цифровая индикация регулируемой величины и заданной точки (задания),• светодиодная индикация выходных управляющих сигналов,• возможность подключения внешней заданной точки (задания),• в одном приборе может быть реализовано несколько регуляторов (от 2 до
8).Двухпозиционные регуляторы часто используют для вспомогательных нужд,
а не для непосредственного регулирования. Например:• если обьектом управляет ПИД регулятор (с аналоговым или импульсным
выходом), двухпозиционный регулятор может включать дополнительный контур нагрева или охлаждения для ускорения выхода процесса на режим;
• двухпозиционный регулятор может запрещать или разрешать некоторые режимы работы основного контура управления при определенных внешних условиях.Недостатки двухпозиционных регуляторов: они практически неприменимы
для систем с существенным транспортным запаздыванием (τd > 0,2Т) и для объектов без самовыравнивания, так как регулируемая величина далеко выходит за необходимые пределы регулирования. В этом случае применяют регуляторы с ПИ или ПИД законом регулирования.
3.2. Распределенные системы автоматизации
С ростом количества датчиков, увеличением площади территории, на ко-торой расположена автоматизированная система управления и усложнением алгоритмов управления становится более эффективным применение распределенных систем. Распределенные системы состоят из множества территориально разнесенных контроллеров и модулей ввода-вывода.
При таком подходе структура распределенной системы и структура алгоритмов ее работы становятся подобны структуре самого объекта автоматизации, а функции сбора, обработки данных, управления и вычисления оказываются распределенными среди множества контроллеров. Каждый контроллер работает со своей группой устройств ввода-вывода и обслуживает определенную часть объекта управления. В частности, технологическое оборудование, как правило, выпускается с уже встроенными ПЛК. Тенденция децентрализации управления и приближения контроллеров к объектам управления является общей для всех систем автоматизации. Распределенную систему управления можно определить как систему, состоящую из множества устройств, разнесенных в пространстве, каждое из которых не зависит от остальных, но взаимодействует с ними для выполнения общей задачи.
В качестве «множества устройств» могут выступать любые микропроцессорные устройства, например ПЛК или разнесенные в пространстве модули ввода-вывода одного контроллера. Однако в последнем случае только сбор данных можно рассматривать как распределенный, в то время как функция управления является сосредоточенной в одном контроллере.
Максимальные преимущества распределенной системы достигаются, когда контроллеры работают автономно, а обмен информацией между ними сведен до минимума.
Распределенная система имеет следующие характеристики, отличающие ее от сосредоточенной:
• большее быстродействие благодаря распределению задач между параллельно работающими процессорами;
• повышенную надежность (отказ одного из контролеров не влияет на работоспособность других);
• большую устойчивость к сбоям;• более простое наращивание или реконфигурирование системы;• упрощенную процедуру модернизации;• большую простоту проектирования, настройки, диагностики и обслуживания
благодаря соответствию архитектуры системы архитектуре объекта управления, а также относительной простоте каждого из модулей системы;
• улучшенную помехоустойчивость и точность благодаря уменьшению длины линий передачи аналоговых сигналов от датчиков к устройствам ввода;
• меньший объем кабельной продукции, пониженные требования к кабелю и более низкая его стоимость;
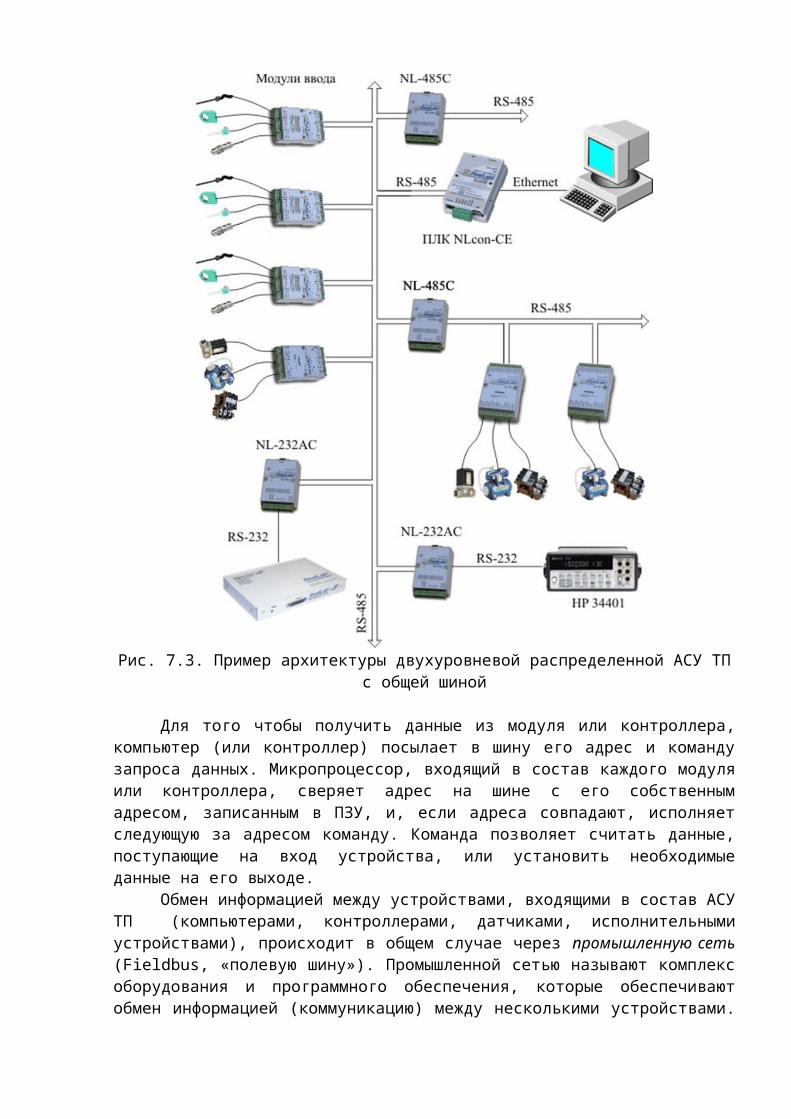
• меньшие расходы на монтаж и обслуживание кабельного хозяйства.Архитектура двухуровневой распределенной автоматизированной системы
управления технологическим процессом (АСУ ТП) с общей шиной представлена на рис. 7.3.
Рис. 7.3. Пример архитектуры двухуровневой распределенной АСУ ТП с общей шиной
Для того чтобы получить данные из модуля или контроллера, компьютер (или контроллер) посылает в шину его адрес и команду запроса данных. Микропроцессор, входящий в состав каждого модуля или контроллера, сверяет адрес на шине с его собственным адресом, записанным в ПЗУ, и, если адреса совпадают, исполняет следующую за адресом команду. Команда позволяет считать данные, поступающие на вход устройства, или установить необходимые данные на его выходе.
Обмен информацией между устройствами, входящими в состав АСУ ТП (компьютерами, контроллерами, датчиками, исполнительными устройствами), происходит в общем случае через промышленную сеть (Fieldbus, «полевую шину»). Промышленной сетью называют комплекс оборудования и программного обеспечения, которые обеспечивают обмен информацией (коммуникацию) между несколькими устройствами. Промышленная сеть является основой для построения распределенных систем сбора данных и управления.
Соединение промышленной сети с ее компонентами (устройствами, узлами сети) выполняется с помощью интерфейсов. Сетевым интерфейсом называют логическую и (или) физическую границу между устройством и средой передачи информации. Обычно этой границей является набор электронных компонентов и связанного с ними программного обеспечения.
Наиболее распространены в промышленной автоматизации последовательные интерфейсы RS-485, RS-232, RS-422, Ethernet, CAN, HART и др.
Для обмена информацией взаимодействующие устройства должны иметь одинаковый протокол обмена. В простейшей форме протокол — это набор правил, которые управляют обменом информацией. Он определяет синтаксис и семантику сообщений, операции управления, синхронизацию и состояния при коммуникации. Протокол может быть реализован аппаратно, программно или программно-аппаратно. Название сети обычно совпадает с названием протокола, что объясняется его определяющей ролью при создании сети.
Взаимодействие устройств в промышленных сетях выполняется в соот-ветствии с моделями клиент-сервер или издатель-подписчик (производитель-потребитель).
В любой модели взаимодействия можно выделить устройство, которое управляет другим (подчиненным) устройством. Устройство, проявившее иници-ативу в обмене, называют ведущим, главным или мастером (Master). Устройство, которое отвечает на запросы мастера, называют ведомым, подчиненным или слейвом (Slave). Ведомое устройство никогда не начинает коммуникацию первым. Оно ждет запроса от ведущего и только отвечает на запросы. Например, в модели клиент-сервер клиент является мастером, сервер — подчиненным. В модели издатель-подписчик на этапе подписки мастером является клиент, а на этапе рассылки публикаций — сервер.
В сети может быть одно или несколько ведущих устройств. Такие сети называются одномастерными или многомастерными соответственно.
3.3. Обмен данными в распределенных системах по протоколу MODBUS
Протокол MODBUS и сеть MODBUS являются самыми распространенными в мире. Несмотря на свой возраст (стандартом де-факто MODBUS стал еще в 1979 г.), MODBUS не только не устарел, но, наоборот, существенно возросло количество новых разработок и объем организационной поддержки этого протокола. Преимуществами MODBUS являются отсутствие необходимости в специальных интерфейсных контроллерах, простота программной реализаций и принципов функционирования. Высокая степень открытости протокола обеспечивается также полностью бесплатными текстами стандартов. В настоящее время развитием MODBUS занимается некоммерческая организация MODBUS-IDA.
MODBUS позволяет унифицировать команды обмена благодаря стандартизации номеров (адресов) регистров и функций их чтения-записи. Основным недостатком MODBUS является сетевой обмен по типу «ведущий/ведомый», что не позволяет ведомым устройствам передавать данные по мере их появления и поэтому требует интенсивного опроса ведомых устройств ведущим.
Физический уровень. В новых разработках на основе MODBUS стандарт рекомендует использовать интерфейс RS-485 с двухпроводной линией передачи, но допускается применение четырехпроводной линии и интерфейса RS-232.

Код функции1 байт
ДанныеN < 254 байт
MODBUS–шина должна состоять из одного магистрального кабеля, от которого могут быть сделаны отводы. Устройства могут подключаться к кабелю тремя способами:
o непосредственно к магистральному кабелю;o через пассивный разветвитель (тройник);o через активный разветвитель (содержащий развязывающий повторитель
интерфейса).MODBUS-устройство обязательно должно поддерживать скорости обмена
9600 и 19200 бит/с, из них 19200 бит/с устанавливается «по умолчанию». Допускаются также скорости 1200, 2400, 4800,..., 38400 бит/с, 65 кбит/с, 115 кбит/с. Сегмент сети, не содержащий повторителей интерфейса, допускает подключение до 32 устройств. Максимальная длина магистрального кабеля при скорости передачи 9600 бит/с составляет 1 км.
Канальный уровень. Протокол MODBUS предполагает, что только одно ведущее устройство (контроллер) и до 247 ведомых (модулей ввода-вывода) могут быть объединены в промышленную сеть. Обмен данными всегда инициируется ведущим. Ведомые устройства никогда не начинают передачу данных, пока не получат запрос от ведущего. Ведомые устройства также не могут обмениваться данными друг с другом. Поэтому в любой момент времени в сети MODBUS может происходить только один акт обмена.
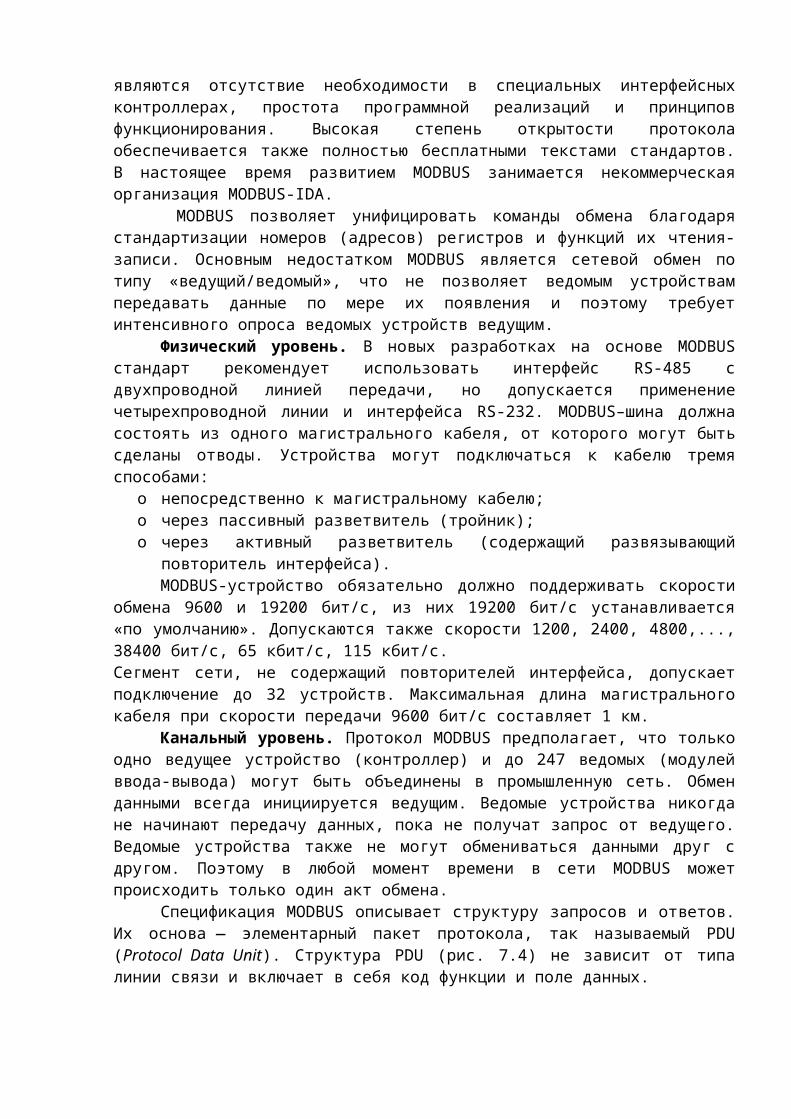
Спецификация MODBUS описывает структуру запросов и ответов. Их основа — элементарный пакет протокола, так называемый PDU (Protocol Data Unit). Структура PDU (рис. 7.4) не зависит от типа линии связи и включает в себя код функции и поле данных.
Рис. 7.4. Структура MODBUS PDU
Код функции кодируется однобайтовым полем и может принимать значения в диапазоне 1…127. Диапазон значений 128…255 зарезервирован для кодов ошибок. Код функции говорит ведомому устройству, какие данные или выполнение какого действия требует от него ведущее устройство. Поле данных может быть переменной длины. Размер пакета PDU ограничен 253 байтами. Поле данных содержит информацию, необходимую ведомому устройству для выполнения заданной мастером функции или содержит данные, передаваемые ведомым устройством в ответ на запрос ведущего. Длина и формат поля зависит от номера функции, также в поле данных может быть детализация кода функции.
Для передачи пакета по физическим линиям связи PDU помещается в другой пакет, содержащий дополнительные поля. Этот пакет носит название ADU (Application Data Unit). Формат ADU зависит от типа линии связи. Существуют три варианта ADU, два для передачи данных через асинхронный интерфейс и один — через TCP/IP сети:
MODBUS ASCII — для обмена используются только ASCII символы. Для проверки целостности используется однобайтовая контрольная сумма. Начало и конец сообщения помечаются специальными символами (начало сообщения ":", конец сообщения CR/LF).
MODBUS RTU — компактный двоичный вариант. Сообщения разделяются по паузе в линии. Сообщение должно начинаться и заканчиваться интервалом тишины, длительностью не менее 3,5 символов при данной скорости передачи. Во время передачи сообщения не должно быть пауз
Адрес ведомого
устройства
Код функции
Данные Блок обнаружения
ошибок
длительностью более 1,5 символов. Для скоростей более 19200 бод допускается использовать интервалы 1,75 и 0,75 мс, соответственно. Проверка целостности осуществляется с помощью CRC.
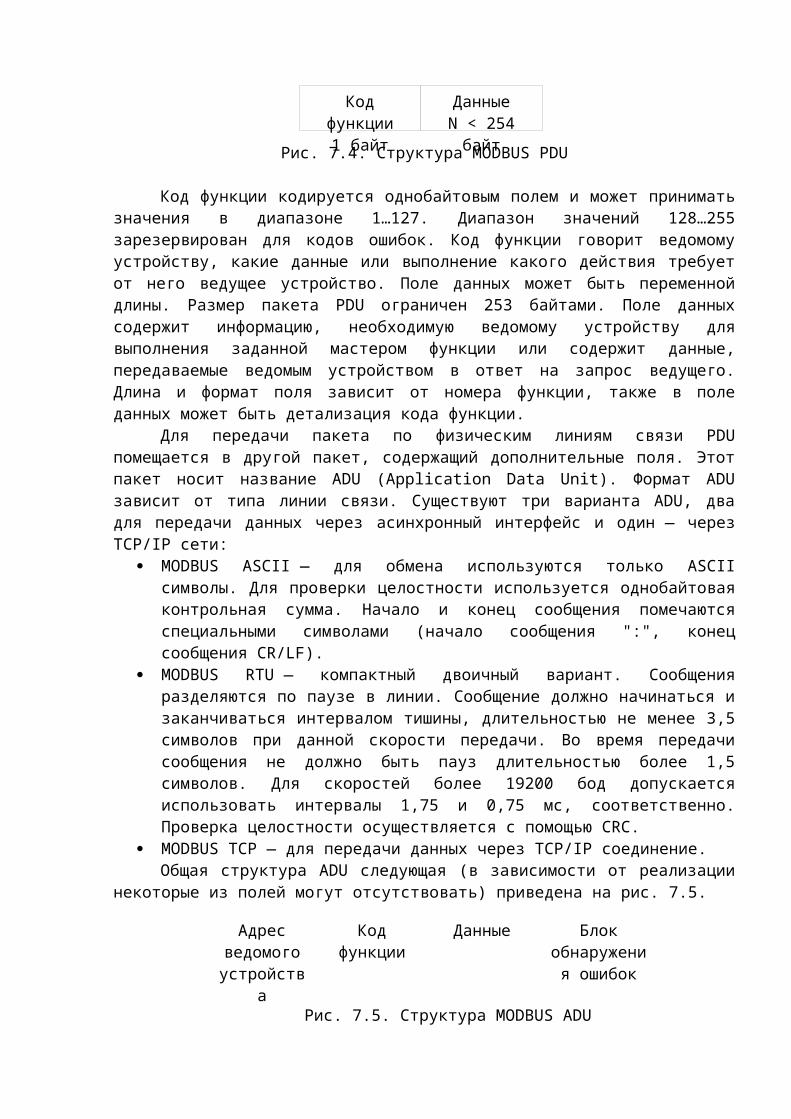
MODBUS TCP — для передачи данных через TCP/IP соединение.Общая структура ADU следующая (в зависимости от реализации некоторые
из полей могут отсутствовать) приведена на рис. 7.5.
Рис. 7.5. Структура MODBUS ADU
Адрес ведомого устройства — адрес подчинённого устройства, к которому адресован запрос. Ведомые устройства отвечают только на запросы, поступившие в их адрес. Ответ также начинается с адреса отвечающего ведомого устройства, который может изменяться от 1 до 247. Адрес 0 используется для широковещательной передачи, его распознаёт каждое устройство, адреса в диапазоне 248…255 — зарезервированы.
Блок обнаружения ошибок — это контрольная сумма для проверки отсутствия ошибок в кадре.
Максимальный размер ADU для последовательных сетей RS232/RS485 — 256 байт, для сетей TCP — 260 байт.
Категории кодов функций. В действующей в настоящее время спецификации протокола определяются три категории кодов функций:
Стандартные команды. Их описание должно быть опубликовано и утверждено MODBUS-IDA. Эта категория включает в себя как уже определенные, так и неиспользуемые в настоящее время коды.
Пользовательские команды. Два диапазона кодов (от 65 до 72 и от 100 до 110), для которых пользователь может назначить произвольную функцию. При этом не гарантируется, что какое-то другое устройство не будет использовать тот же самый код для выполнения другой функции.
Зарезервированные. В эту категорию входят коды функций, не являющиеся стандартными, но уже используемые в устройствах, производимых различными компаниями. Это коды 9, 10, 13, 14, 41, 42, 90, 91, 125, 126 и 127.MODBUS специфицирует 4 типа данных:
Discrete Inputs — однобитовый тип, доступен только на чтение. Coils — однобитовый тип, доступен на чтение и на запись. Input Registers — 16-битовый знаковый или беззнаковый тип, доступен
только на чтение. Holding Registers — 16-битовый знаковый или беззнаковый тип, доступен на
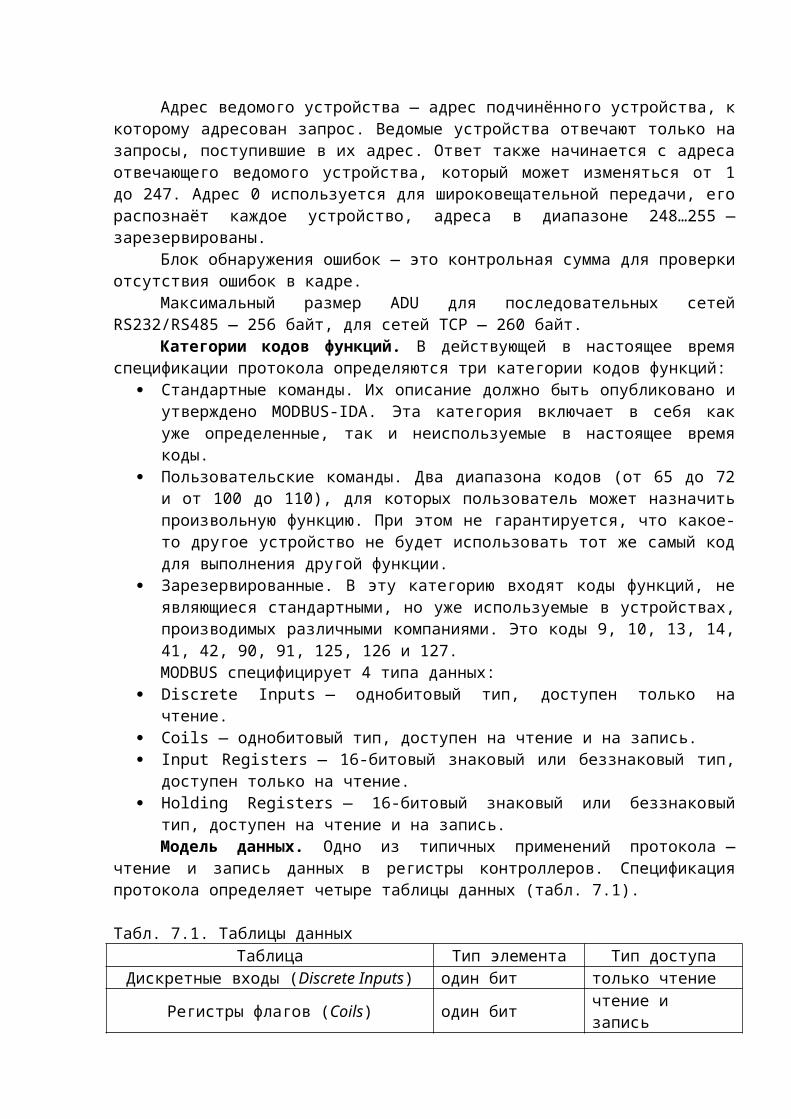
чтение и на запись.Модель данных. Одно из типичных применений протокола — чтение и
запись данных в регистры контроллеров. Спецификация протокола определяет четыре таблицы данных (табл. 7.1).
Табл. 7.1. Таблицы данныхТаблица Тип элемента Тип доступа
Дискретные входы (Discrete Inputs) один бит только чтениеРегистры флагов (Coils) один бит чтение и запись
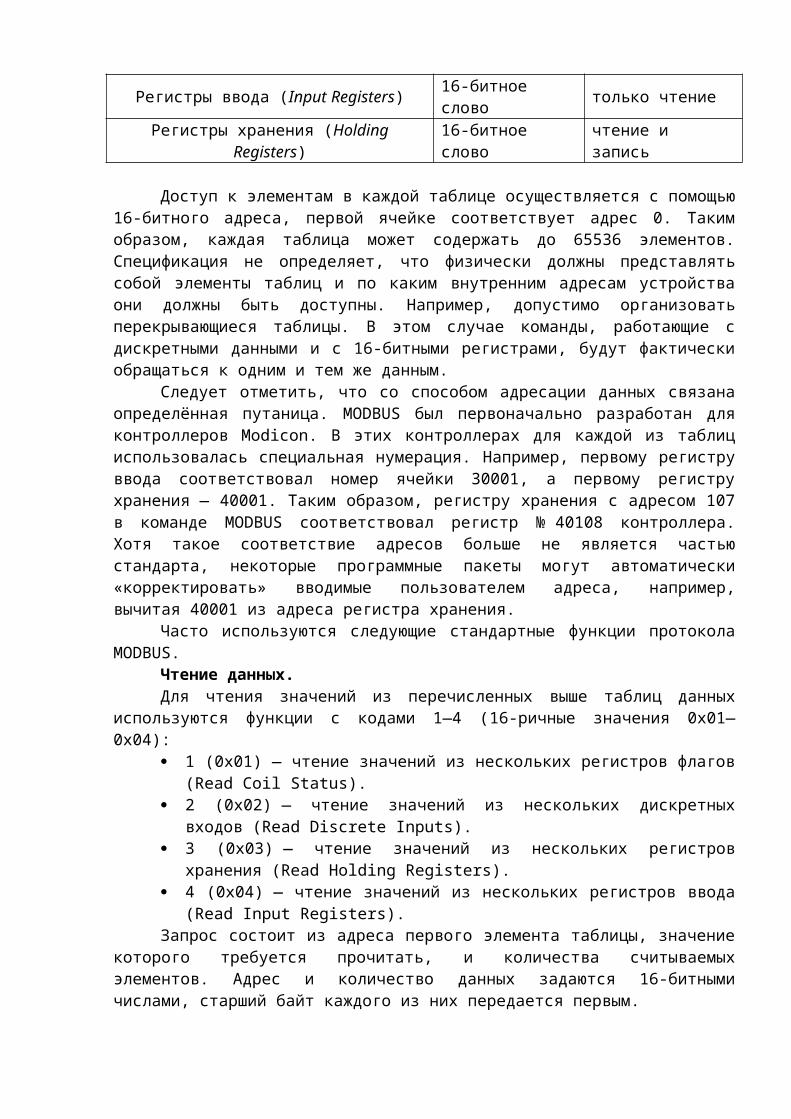
Регистры ввода (Input Registers) 16-битное слово только чтение
Регистры хранения (Holding Registers) 16-битное слово чтение и запись
Доступ к элементам в каждой таблице осуществляется с помощью 16-битного адреса, первой ячейке соответствует адрес 0. Таким образом, каждая таблица может содержать до 65536 элементов. Спецификация не определяет, что физически должны представлять собой элементы таблиц и по каким внутренним адресам устройства они должны быть доступны. Например, допустимо организовать перекрывающиеся таблицы. В этом случае команды, работающие с дискретными данными и с 16-битными регистрами, будут фактически обращаться к одним и тем же данным.
Следует отметить, что со способом адресации данных связана определённая путаница. MODBUS был первоначально разработан для контроллеров Modicon. В этих контроллерах для каждой из таблиц использовалась специальная нумерация. Например, первому регистру ввода соответствовал номер ячейки 30001, а первому регистру хранения — 40001. Таким образом, регистру хранения с адресом 107 в команде MODBUS соответствовал регистр № 40108 контроллера. Хотя такое соответствие адресов больше не является частью стандарта, некоторые программные пакеты могут автоматически «корректировать» вводимые пользователем адреса, например, вычитая 40001 из адреса регистра хранения.
Часто используются следующие стандартные функции протокола MODBUS.Чтение данных.Для чтения значений из перечисленных выше таблиц данных используются
функции с кодами 1—4 (16-ричные значения 0x01—0x04): 1 (0x01) — чтение значений из нескольких регистров флагов (Read Coil
Status). 2 (0x02) — чтение значений из нескольких дискретных входов (Read
Discrete Inputs). 3 (0x03) — чтение значений из нескольких регистров хранения (Read
Holding Registers). 4 (0x04) — чтение значений из нескольких регистров ввода (Read Input
Registers).Запрос состоит из адреса первого элемента таблицы, значение которого
требуется прочитать, и количества считываемых элементов. Адрес и количество данных задаются 16-битными числами, старший байт каждого из них передается первым.
В ответе передаются запрошенные данные. Количество байт данных зависит от количества запрошенных элементов. Перед данными передается один байт, значение которого равно количеству байт данных.
Значения регистров хранения и регистров ввода передаются начиная с указанного адреса, по два байта на регистр, старший байт каждого регистра передаётся первым.
Значения флагов и дискретных входов передаются в упакованном виде: по одному биту на флаг. Единица означает включённое состояние, ноль — выключенное. Значения запрошенных флагов заполняют сначала первый байт, начиная с младшего бита, затем следующие байты, также от младшего бита к старшим. Младший бит первого байта данных содержит значение флага, указанного в поле «адрес». Если запрошено количество флагов, не кратное восьми, то значения лишних битов заполняются нулями.
Запись одного значения: 5 (0x05) — запись значения одного флага (Force Single Coil). 6 (0x06) — запись значения в один регистр хранения (Preset Single Register).
Команда состоит из адреса элемента (2 байта) и устанавливаемого значения (2 байта).
Для регистра хранения значение является просто 16-битным словом.Для флагов значение 0xFF00 означает включённое состояние, 0x0000 —
выключенное, другие значения недопустимы.Если команда выполнена успешно, ведомое устройство возвращает копию
запроса.Запись нескольких значений:
15 (0x0F) — запись значений в несколько регистров флагов (Force Multiple Coils).
16 (0x10) — запись значений в несколько регистров хранения (Preset Multiple Registers).Команда состоит из адреса элемента, количества изменяемых элементов,
количества передаваемых байт устанавливаемых значений и самих устанавливаемых значений. Данные упаковываются так же, как в командах чтения данных.
Ответ состоит из начального адреса и количества изменённых элементов.Обработка ошибок.Во время обмена данными могут возникать ошибки двух типов:
ошибки, связанные с искажениями при передаче данных; логические ошибки (запрос принят без искажений, но не может быть
выполнен).При передаче по асинхронным линиям связи ошибки первого типа
обнаруживаются при помощи проверки соответствия принятого запроса установленному формату ADU и вычисления контрольной суммы. Дополнительно, для проверки каждого символа может использоваться бит четности. Если подчинённое устройство обнаруживает искажение данных, принятый запрос игнорируется, ответное сообщение не формируется. Главное устройство может обнаружить ошибку по истечению времени, отведённого на ответ.
В MODBUS TCP дополнительная проверка целостности данных не предусмотрена. Передача данных без искажений обеспечивается протоколами TCP/IP.
При ошибках второго типа подчинённое устройство отсылает сообщение об ошибке (если запрос адресован этому устройству; на широковещательные запросы ответ не отправляется). Признаком того, что ответ содержит сообщение об ошибке, является установленный старший бит номера функции. За номером функции, вместо обычных данных, следует код ошибки и, при необходимости, дополнительные данные об ошибке.
4. Меры безопасности
Во время выполнения лабораторной работы необходимо: соблюдать правила включения и выключения вычислительной техники; не подключать кабели, разъемы и другую аппаратуру к компьютеру, не
относящиеся к лабораторной установке; при включенном напряжении сети не отключать, не подключать и не
трогать кабели, соединяющие различные устройства компьютера; в случае обнаруженной неисправности в работе оборудования или
нарушения правил техники безопасности сообщить руководителю лабораторной работы;
не пытаться самостоятельно устранить неисправности в работе аппаратуры;
по окончании работы привести в порядок рабочее место.ВНИМАНИЕ! При работе за компьютером необходимо помнить: к каждому рабочему месту подведено опасное для жизни напряжение. Поэтому во время работы надо быть предельно внимательным и соблюдать все требования техники безопасности!
5. Описание лабораторной установки
Для выполнения лабораторной работы используются: ПЛК FATEK FBs-20MC с дополнительным модулем связи FBs-CM25,
модулем аналогового вывода FBs-20DA и модулем аналогового ввода FBs-6AD;
персональный компьютер (ПК) с установленным программным обеспечением WinProLadder для программирования ПЛК и наблюдения за его состоянием во время работы программы ПЛК;
персональный компьютер с установленным программным обеспечением TRACE MODE 6, используемый в качестве операторской станции (ОпС).
Питание от сети 220 В, 50 Гц подается на ПЛК через сетевой шнур. Базовый блок ПЛК соединяется с ПК через кабель интерфейса RS-232 (порт 0 ПЛК). Порт 0 может работать только по специализированному протоколу FATEK, поэтому он используется для программирования ПЛК. Настройки порта 0 по умолчанию: скорость 9600 бит/с, длина посылки 7 бит, без контроля четности, 1 стоп-бит (7-n-1).
Модуль связи ПЛК соединяется с ОпС через кабель интерфейса RS-232 (порт 3 ПЛК). Порт 3 должен быть настроен на работу по протоколу MODBUS RTU с параметрами по умолчанию: скорость 9600 бит/с, длина посылки 8 бит, с контролем четности, 1 стоп-бит (8-e-1). При обмене по протоколу MODBUS RTU ОпС является ведущим узлом, а ПЛК – ведомым. Настройка порта производится с помощью двух регистров. Регистр R4047 настраивает протоколы работы портов связи. Старший байт слова в этом регистре имеет фиксированное значение 55H. Младший байт настраивает порты 1…4 на нужный протокол. Настройка порта 3 определяется битом 3: 0 – протокол FATEK, 1 – протокол MODBUS RTU (ведомый). Следовательно, в регистре R4047 должно находиться слово 5508H (2176810). Регистр R4043 настраивает порт 3 по параметрам связи. Старший байт слова в этом регистре всегда 56H. Для MODBUS RTU длина посылки всегда 8 бит. Младший байт слова в R4043:
Бит 7 (вид контроля): 0 – четность, 1 – нечетность; Бит 6 (длина посылки): 0 – 7 бит, 1 – 8 бит; Бит 5 (контроль четности): 0 – без контроля четности, 1 – с контролем
четности; Бит 4 (количество стоп-битов): 0 – 1 стоп-бит, 1 – 2 стоп-бита; Биты 3…0 (скорость работы, бит/с): 0H – 4800, 1H – 9600, 2H – 19200, 3H –
38400, 4H – 76800, ….Для требуемой настройки параметров связи (8-e-1, 9600 бит/с) в регистр R4043 необходимо записать значение 5661H (2211310).
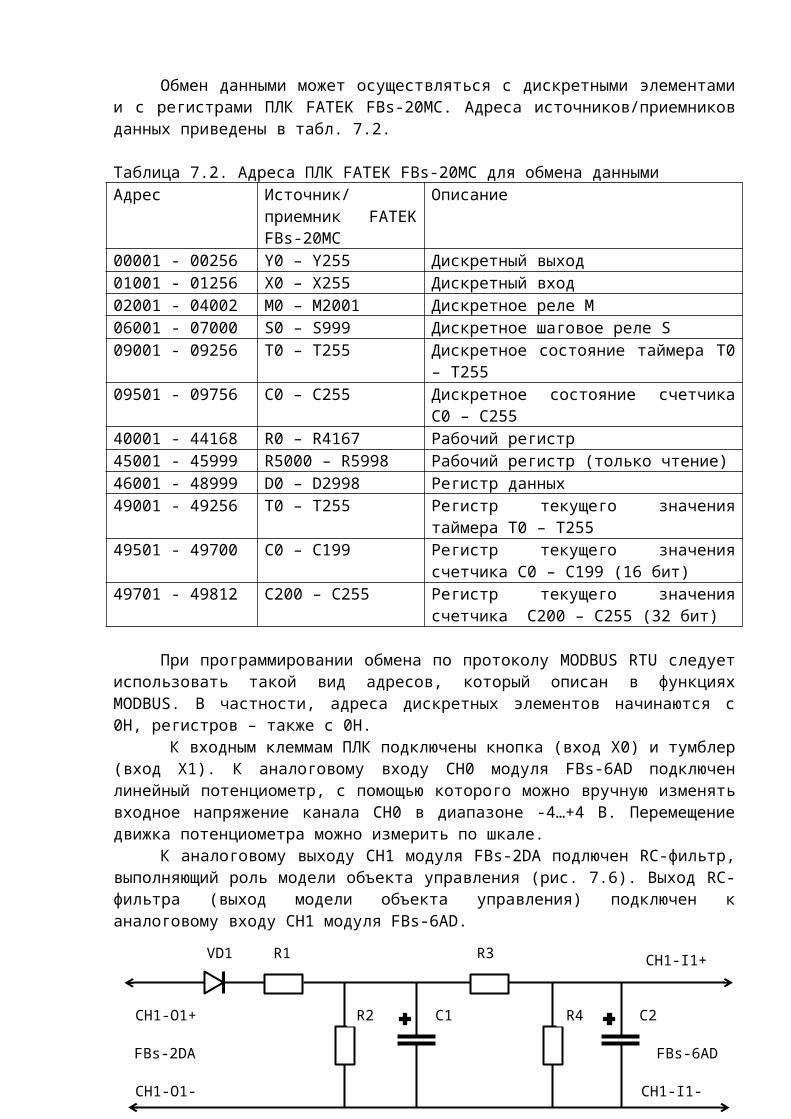
Обмен данными может осуществляться с дискретными элементами и с регистрами ПЛК FATEK FBs-20MC. Адреса источников/приемников данных приведены в табл. 7.2.
Таблица 7.2. Адреса ПЛК FATEK FBs-20MC для обмена даннымиАдрес Источник/приемник
FATEK FBs-20MCОписание
+15 В
R610к
1 +5В
X2
00001 - 00256 Y0 – Y255 Дискретный выход01001 - 01256 X0 – X255 Дискретный вход02001 - 04002 M0 – M2001 Дискретное реле M06001 - 07000 S0 – S999 Дискретное шаговое реле S09001 - 09256 T0 – T255 Дискретное состояние таймера T0 –
T25509501 - 09756 C0 – C255 Дискретное состояние счетчика C0 –
C25540001 - 44168 R0 – R4167 Рабочий регистр45001 - 45999 R5000 – R5998 Рабочий регистр (только чтение)46001 - 48999 D0 – D2998 Регистр данных49001 - 49256 T0 – T255 Регистр текущего значения таймера T0
– T25549501 - 49700 C0 – C199 Регистр текущего значения счетчика C0
– C199 (16 бит)49701 - 49812 C200 – C255 Регистр текущего значения счетчика
C200 – C255 (32 бит)
При программировании обмена по протоколу MODBUS RTU следует использовать такой вид адресов, который описан в функциях MODBUS. В частности, адреса дискретных элементов начинаются с 0H, регистров – также с 0H.
К входным клеммам ПЛК подключены кнопка (вход X0) и тумблер (вход X1). К аналоговому входу CH0 модуля FBs-6AD подключен линейный потенциометр, с помощью которого можно вручную изменять входное напряжение канала CH0 в диапазоне -4…+4 В. Перемещение движка потенциометра можно измерить по шкале.
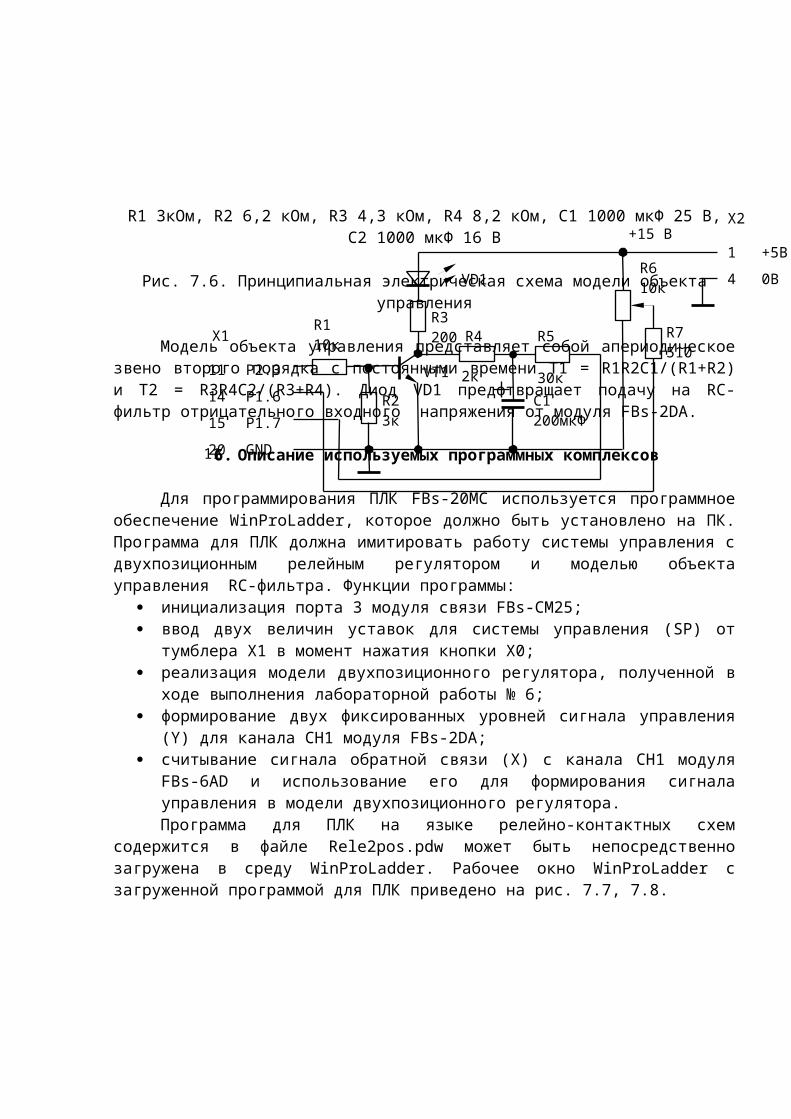
К аналоговому выходу CH1 модуля FBs-2DA подлючен RC-фильтр, выполняющий роль модели объекта управления (рис. 7.6). Выход RC-фильтра (выход модели объекта управления) подключен к аналоговому входу CH1 модуля FBs-6AD.
R1 3кОм, R2 6,2 кОм, R3 4,3 кОм, R4 8,2 кОм, C1 1000 мкФ 25 В, C2 1000 мкФ 16 В
Рис. 7.6. Принципиальная электрическая схема модели объекта управления
Модель объекта управления представляет собой апериодическое звено второго порядка с постоянными времени T1 = R1R2C1/(R1+R2) и T2 = R3R4C2/(R3+R4). Диод VD1 предотвращает подачу на RC-фильтр отрицательного входного напряжения от модуля FBs-2DA.
6. Описание используемых программных комплексов
FBs-6AD
CH1-I1-
CH1-I1+
FBs-2DA
CH1-O1-
CH1-O1+ C2R4C1R2
R3R1VD1

Для программирования ПЛК FBs-20MC используется программное обеспечение WinProLadder, которое должно быть установлено на ПК. Программа для ПЛК должна имитировать работу системы управления с двухпозиционным релейным регулятором и моделью объекта управления RC-фильтра. Функции программы:
инициализация порта 3 модуля связи FBs-CM25; ввод двух величин уставок для системы управления (SP) от тумблера X1 в
момент нажатия кнопки X0; реализация модели двухпозиционного регулятора, полученной в ходе
выполнения лабораторной работы № 6; формирование двух фиксированных уровней сигнала управления (Y) для
канала CH1 модуля FBs-2DA; считывание сигнала обратной связи (X) с канала CH1 модуля FBs-6AD и
использование его для формирования сигнала управления в модели двухпозиционного регулятора.Программа для ПЛК на языке релейно-контактных схем содержится в
файле Rele2pos.pdw может быть непосредственно загружена в среду WinProLadder. Рабочее окно WinProLadder с загруженной программой для ПЛК приведено на рис. 7.7, 7.8.
Рис. 7.7. Рабочее окно WinProLadder с программой для ПЛК
Рис. 7.8. Рабочее окно WinProLadder с программой для ПЛК
Цепь N000 осуществляет настройку порта связи (порт 3) на режим MODBUS RTU. Контакты внутреннего реле M1924 (начальный импульс, первый скан при запуске программы ПЛК) загружают константу 2176810 в регистр R4047 и константу 2211310 в регистр R4043 с помощью двух функций 08.MOV.
Цепи N001, N002 производят запись двух кодов уставок в регистр R0 в зависимости от положения тумблера X1 в момент нажатия кнопки X0.
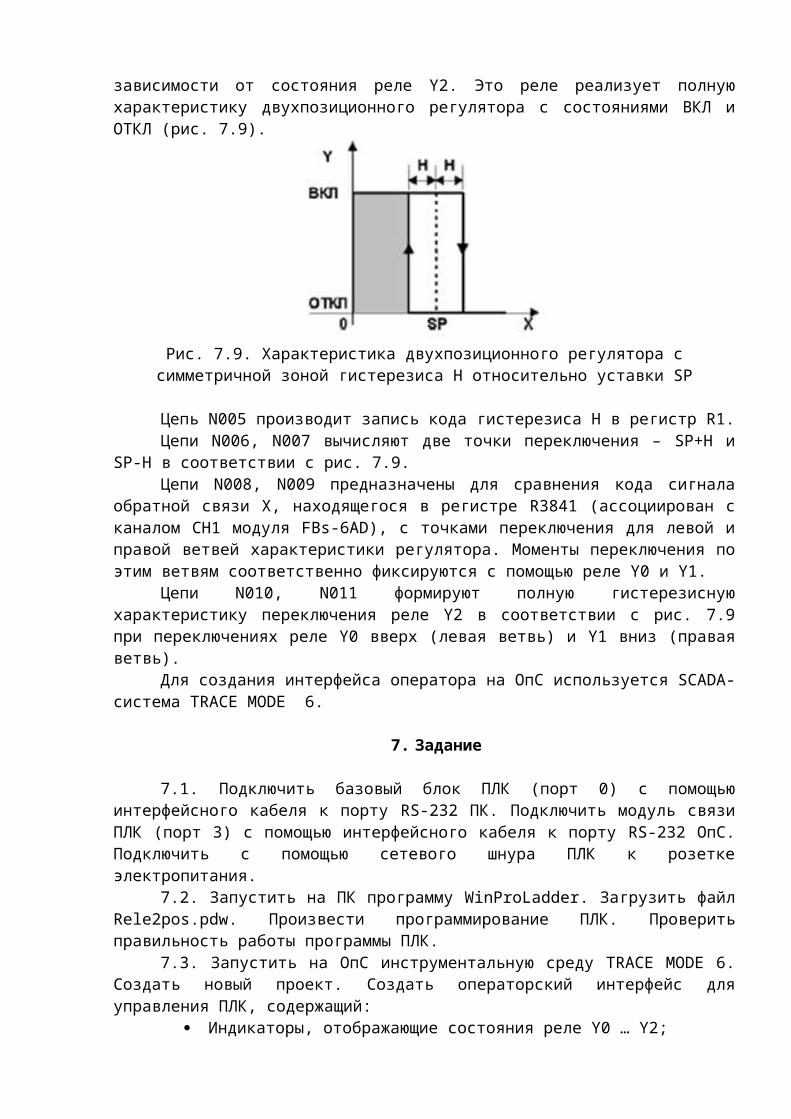
Цепи N003, N004 производят запись двух кодов управления в регистр R3905, ассоциированный с каналом CH1 модуля FBs-2DA, в зависимости от состояния реле Y2. Это реле реализует полную характеристику двухпозиционного регулятора с состояниями ВКЛ и ОТКЛ (рис. 7.9).
Рис. 7.9. Характеристика двухпозиционного регулятора с симметричной зоной гистерезиса H относительно уставки SP
Цепь N005 производит запись кода гистерезиса H в регистр R1.Цепи N006, N007 вычисляют две точки переключения – SP+H и SP-H в
соответствии с рис. 7.9.Цепи N008, N009 предназначены для сравнения кода сигнала обратной
связи X, находящегося в регистре R3841 (ассоциирован с каналом CH1 модуля FBs-6AD), с точками переключения для левой и правой ветвей характеристики регулятора. Моменты переключения по этим ветвям соответственно фиксируются с помощью реле Y0 и Y1.
Цепи N010, N011 формируют полную гистерезисную характеристику переключения реле Y2 в соответствии с рис. 7.9 при переключениях реле Y0 вверх (левая ветвь) и Y1 вниз (правая ветвь).
Для создания интерфейса оператора на ОпС используется SCADA-система TRACE MODE 6.
7. Задание
7.1. Подключить базовый блок ПЛК (порт 0) с помощью интерфейсного кабеля к порту RS-232 ПК. Подключить модуль связи ПЛК (порт 3) с помощью интерфейсного кабеля к порту RS-232 ОпС. Подключить с помощью сетевого шнура ПЛК к розетке электропитания.
7.2. Запустить на ПК программу WinProLadder. Загрузить файл Rele2pos.pdw. Произвести программирование ПЛК. Проверить правильность работы программы ПЛК.
7.3. Запустить на ОпС инструментальную среду TRACE MODE 6. Создать новый проект. Создать операторский интерфейс для управления ПЛК, содержащий:
Индикаторы, отображающие состояния реле Y0 … Y2; Кнопку, позволяющую вводить и передавать в регистр R0 код уставки
SP; Кнопку, позволяющую вводить и передавать в регистр R1 код
гистерезиса H; Текстовую строку, отображающую текущий код уставки SP из
регистра R0; Текстовую строку, отображающую текущий код управления Y из
регистра R3905; Текстовую строку, отображающую текущий код сигнала обратной
связи X из регистра R3841; Компонент «Тренд», отображающий изменение текущих кодов из
регистров R0, R2, R3, R3905 и R3841 во времени.7.4. Выполнить сохранение проекта для монитора реального времени
(МРВ). Запустить проект в МРВ. Проверить работу операторского интерфейса по управлению ПЛК.
8. Методика выполнения задания
1.2.3.4.5.6.
8.1. Подключение кабелей выполнять в последовательности: сначала RS-232, затем питание 220 В на ПЛК.
8.2. Для программирования ПЛК выполните пункты меню следующим образом: File -> Save AS -> To PLC – появится диалог установки параметров соединения с ПЛК. Следует проверить параметры связи порта COM1 ПК на соответствие параметрам связи порта 0 ПЛК по умолчанию (см. п. 5). Номер станции для ПЛК – 1. Для запуска ПЛК на выполнение программы выполните пункты меню следующим образом: PLC -> Run PLC -> OK.
8.3. В интегрированной среде инструментальной среде TRACE MODE 6 нужно создать новый проект в «простом» стиле.
Разработку проекта следует начать со слоя «Источники/Приемники», где описываются входы и выходы ПЛК. Для этого откроем контекстное меню по правой кнопке мыши и выберем группу MODBUS.
Для чтения состояний реле Y0…Y7 в группе MODBUS создадим компонент Rout_Byte(1). Это функция 1 протокола MODBUS. Откроем созданный компонент двойным кликом на редактирование. Установим параметры компонента следующим образом. Настройку Номер порта оставим заданную по умолчанию, т.к. для последовательного порта СОМ1 индекс равен 0. Адрес ПЛК в сети RS-232 равен 1, Имя – добавим к имени по умолчанию пояснение _Y0, Канал – номер дискретного выхода Y0 в области адресов Y0…Y255 (табл. 7.2, номер начинается с 0) – 0, Направление – Input, Формат – Дискрет. Поле IP-адрес для протокола MODBUS RTU не заполняем. Параметры Номер порта, Адрес, Тип протокола, IP-адрес имеют такие же значения и для всех других компонентов в группе.
Для записи слова в регистр R0 в группе MODBUS создадим компонент W_Word(6). Это функция 6 протокола MODBUS. Установим параметры компонента: Имя – добавим к имени по умолчанию пояснение _R0, Канал – номер регистра R0 в области адресов регистров (табл. 7.2, адреса начинаются с 40001, номер начинается с 0) – 0, Направление – Output, Формат – Дискрет. Аналогично для записи слова в регистр R1 создадим и настроим подобный компонент W_Word(6), для него Канал будет иметь значение 1. Здесь и в дальнейшем создавать подобные новые компоненты можно с помощью щелчка правой кнопкой мыши на имеющемся компоненте и выбора пункта меню Создать по шаблону.
Для чтения слова из регистра R0 в группе MODBUS создадим компонент Rout_Word(3). Это функция 3 протокола MODBUS. Установим параметры компонента: Имя – добавим к имени по умолчанию пояснение _R0, Канал – номер регистра R0 в области адресов регистров – 0, Направление – Input, Формат – Аналог. Аналогичным К создадим и настроим компоненты для чтения слова из регистров R2, R3, R3841 и R3905. Для них в поле Канал следует записывать значения 0x2, 0x3, 0xF01, 0xF41.
Вид компонентов группы MODBUS_1 приведен на рис. 7.10.

Рис. 7.10. Компоненты группы MODBUS_1
Созданные и настроенные компоненты с помощью механизма «drag and drop» переместим в группу Каналы узла RTM_1.
Поскольку связь с ПЛК осуществляется по последовательному порту, создадим в узле RTM_1 группу СОМ-порты, а в ней – компонент COM-порт. Откроем на редактирование созданный порт и проверим соответствие заданных по умолчанию параметров тем значениям, которые указаны в п. 5 для порта 3.
Создадим графический интерфейс для управления ПЛК. Для этого двойным кликом откроем на редактирование компонент «Экран». В таблицу аргументов экрана (она открывается через меню «Вид»), необходимо поместить созданные каналы. Воспользуемся механизмом «drag and drop», просто перетащим их туда. Настройка параметров аргументов экрана показана на рис. 7.11.
Рис. 7.11. Настройка параметров аргументов экрана
Для отображения состояния выходных реле Y0…Y2 разместим на рабочем поле компонента «Экран» три компонента «Текст», у которых в свойство Текст следует записать соответствующие значения. Настройки для свойства Заливка:
Цвет заливки/Вид индикации: Arg&Конст;
o Привязка – привязать к аргументу экрана Rout_Byte_1;o Мигание – среднее;o Если ИСТИННО – красный;o Если ЛОЖНО – серый;o Константа – задать значения 0x1 (для Y0), 0x2 (для Y1), 0x4 (для
Y2.
Для задания значения уставки в регистре R0 будем использовать кнопку с соответствующим текстом (Уставка R0). Для нее надо установить свойства События/MousePress/Передать значение/:
Тип передачи – Ввести и передать; Результат – привязать к аргументу экрана W_Word_6 … _R0_In.
Для задания значения гистерезиса в регистре R1 создадим аналогичную кнопку с текстом (Гистерезис R1), привязка – к аргументу экрана W_Word_6 … _R1_In.
Для отображения переданного в регистр R0 значения используйте компонент «Текст» со следующими настройками для свойства Текст:
Вид индикации – Значение; Вид индикации/Привязка – привязать к аргументу экрана W_Word_6
… _R0_In; Вид индикации/Формат – Generic; Вид индикации/ Формат/Generic – %g.
Для отображения переданного в регистр R1 значения создадим аналогичный компонент с привязкой к аргументу экрана W_Word_6 … _R1_In.
Для отображения изменяющихся во времени кодов сигналов в системе управления разместим на рабочем поле компонента «Экран» графический элемент «Тренд». Привязку его ко всем аргументам экрана Rout_Word_3 выполним с помощью механизма «drag and drop». Изменим настройки этого элемента по параметрам Кривая1 … Кривая5:
Имя – указать наименование параметра; Цвет – индивидуальный для каждой кривой; Стиль линии – пунктирная линия для границ переключения (R2 и R3),
сплошная линия для остальных кривых; Толщина линии – 1 для границ переключения и 2 для остальных
кривых; Формат - %g; Макс. значение – 10000; Мин. значение – 0.
Вид графического экрана показан на рис. 7.12.
Рис. 7.12. Вид графического экрана
8.4. Сохраним на диск выполненную работу. С помощью иконки выполним сохранение проекта для МРВ. Теперь для того, чтобы запустить наш проект под управлением исполнительного модуля, так называемым профайлером, отметим узел RTM_1 левой клавишей мыши в дереве проекта. На панели инструментов выполним запуск исполнительного модуля или профайлера. С помощью иконки запустим исполнительный модуль в работу.
Для проверки работы операторского интерфейса и всей системы управления:
Изменяя значения уставки и гистерезиса, убедиться в правильности функционирования системы управления.
Снять переходную характеристику объекта управления. Убедиться в наличии автоколебаний в режиме отсутствия
ограничений. Измерить амплитуду и период автоколебаний.


















