
ARMD 新ヴァージョン V5.8 の紹介...
16
1 ARMD 新ヴァージョン V5.8 の紹介 Doc.No.ss134011 平成 25 年 4 月 26 日 杉村回転機械研究所 杉村章二郎
Transcript of ARMD 新ヴァージョン V5.8 の紹介...

1
ARMD 新ヴァージョン V5.8の紹介 Doc.No.ss134011
平成 25 年 4 月 26 日 杉村回転機械研究所 杉村章二郎

2
V5.8の能力増強点の簡単な紹介
新しく追加された点
▲ARMD Shaft Viewerと
して、ARMD ソフトに新
しく3D の軸系表示が加
わりました。モデル軸系と
その解析結果の最も現実
に近い形での表示が可能
になりました。3次元表示
は、注目する部位や解析結
果の動特性を回転、移動、
拡大、そしてアニメーショ
ンで見ることができます。
▲Windows XP、Vista、
7 での操作に対してユーザー定義のホル
ダーやファイルを含んで、ソフト構成上
のメジャーな見直しが行われました。
保護されたあるいは解放されエリアやホ
ルダーでのインストールに関しては OS
のセキュリティガイドラインに従ってい
ます。
▲ArmdWear は、wearing /seal のため
に新しく開発されたツールです。
非圧縮性流体のバネ定数、減衰係数など
の動特性を含んで ring/seal(wear rings)の特性を解析します。ボイラーフィードポンプやア
ンモニア/窒素/水 ポンプなどに適用できます。API610 に仕様されているポンプのウェア
リングの動的な影響を解析できることを狙ったものです。

3
新しく追加された点 つづき
▲ArmdAeroCC としてガス圧縮機における空力連成不安定力の解析が新しく開発された
TOOLとして ARMDに追加されました。解析は API617の Alfordと Wachelの式に基づい
ています。
▲Network License が新しいヴァージョンでの選択肢として可能になりました。
Local area networkを利用した多ユーザーのソフトウエアライセンスも可能になりました。
一方、ARMD モジュールとパッケイジは単一独立ユーザー向けにソフトウエア組込キーに
よるライセンスまたは、Hardware キー(Dongle)ライセンスも提供しております。
増強改良された点
▲取扱い材料数が 250種から 500種に増えました。
▲軸受/支持バネの数が横振動解析、ねじり振動解析において 100から 250に増えました。
▲油膜軸受でよくつかわれる軸受に対しての Default セッティングや説明図が改良されま
した。
▲ソフトウエア全体としてフートポンド単位と SI単位の表示の充実
▲既存のヴァージョンから projectやホルダーを転換するための toolの改良
▲旧ヴァージョンからの入力 fileの互換性の確立

4
詳細説明
ARMD Shaft Viewer はあたらしく開発されて ARMDソフトに加えられた 3次元のロータ
図の表示機能です。これには非常に実物に近いロータの組立モデルあるいは駆動軸系のモ
デルを表示するための最新のグラフィック技術が使われています。これに加えて、横振動
解析の ROTLATモジュールあるいは、ねじり振動解析の TORSIONモジュールで解析され
た結果も 3 次元で表示できます。解析モデルと解析結果は、拡大縮小、回転、移動、とア
ニメーション表示が自由にでき、動的挙動をよりわかりやすく表示できるようになりまし
た。ARMD Shaft ViewerのWorkspaceを下図に示します。
Shaft Viewer の Utility は、ARMD の Main
menuから起動できます。またPCの start menu
から単独に起動することもできます。ROTLAT
と TORSIONのモジュールに完全に組み込まれ
ており、View Menuから自動的に開かれて利用
することができます。

5
Isometric 表示が Defaultでなさ
れます。視点は画面の左にある拡
大縮小や回転のボタンを用いて
修正することができます。+や-
ボタンで拡大縮小ができますし、
3 軸方向に自由に回転ができま
す。。矢印ボタンで上下左右に移
動できます。ボタンを押し続ける
ことによって連続変形修正が可
能であり、画面は ISO メトリッ
ク、YZ面、ZX面、XY面などの
4つの標準の視点にいつでも変
更できます。Encloseボタンを押せば、画像はいつでも、視点を変更することなく中央に再
配置できます。モデルの各要素は、解像度制御のチェックボックスから選択して表示でき
ます。実体モデル(Solid)や格子モデル(Mesh)が選ばれた場合は、その表示レベルは自動
的に選ばれます。
上図はメッシュが荒いですが、拡大した右
上図では、細かいメッシュに変更されてい
ます。
実体ではなくメッシュが選ばれたときは
すべてのメッシュが示されます。
エレメント情
報は軸要素画
面に示されま
す。

6
Shaft Viewer の多くの特徴の1つは、解析結果をアニメーションで動かして見せることが
できることです。
Shaft Viewer で ROTLAT や TORSION モジ
ュールを使用したモデルをロードしたときに
は、表示できる出力 file を自動的に Shaft
Viewerが開いてくれるようになっており、ユー
ザーがわざわざ開く必要がありません。これら
の Output fileの setがユーザーには Viewerの
Main tool bar のOutput set のプルダウンボッ
クスで示されます。一旦 Output set と Property が選ばれると、ソリッドモデル付、また
は無で下図に見るように表示されます。
ねじり振動解析結果の可視化に対しては、たとえばモード形状で、Z軸(軸心)に対するね
じり角度変位が表示されます。ねじり角度変位は±45度の範囲で、モデル直径の 1.25倍
の大きさで表示されます。長い駆動軸系のねじり振動解析モデルにたいしては、ねじり角
度変位は±90度の範囲で、また軸径の 2倍の大きさで表示されます。

7
モード形状や振動振幅(オービット)は Playボタンを押
すことによって、アニメーションで表示されます。アニ
メーション中に pauseボタンを押すことによって、その
場で動きを止めることができます。スライダーの速度バ
ーでアニメーションの速度を加減することができます。
サンプルアニメーションを以下に示します。

8
新しいWear-Rings解析ツール(ArmdWear)
ArmdWear では、ボイラー給水ポンプやアンモニア、窒素、水ポンプなどの非圧縮性流
体を扱うポンプで使われるWear Ring/Sealのバネ定数、減衰係数などの動特性を含んだ特
性を解析できます。ArmdWear での解析は、1つの運転点での値(Single Case)と直径、
間隙、長さ、差圧、回転速度、粘度、比重などの各種パラメータを変えた場合(Multiple Case)
の両方の解析ができます。
横振動解析(ROTLAT)の解析にリンクして動特性(バネ定数、減衰係数)は、自動的に
取り込まれます。運転中に Wear ring の間隙が変化した場合の固有振動数や安定性、振動
応答などへの影響を解析することができます。
9
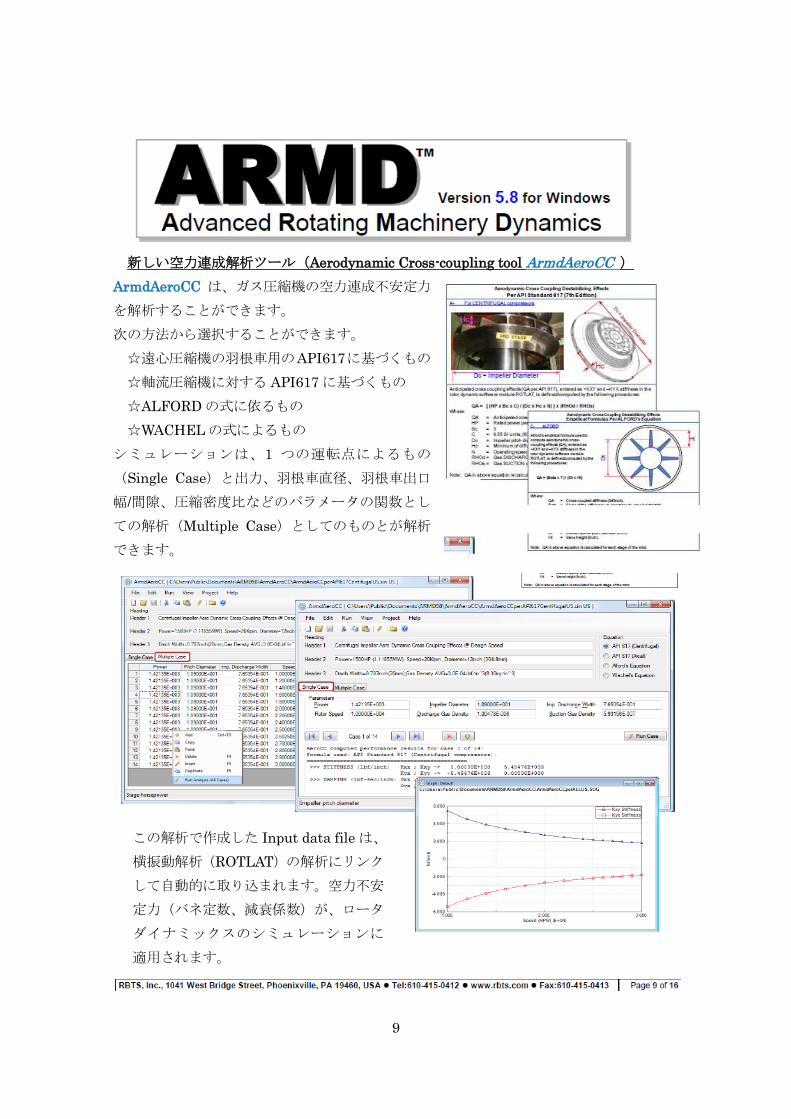
新しい空力連成解析ツール(Aerodynamic Cross-coupling tool ArmdAeroCC )
ArmdAeroCC は、ガス圧縮機の空力連成不安定力
を解析することができます。
次の方法から選択することができます。
☆遠心圧縮機の羽根車用のAPI617に基づくもの
☆軸流圧縮機に対する API617に基づくもの
☆ALFORDの式に依るもの
☆WACHELの式によるもの
シミュレーションは、1 つの運転点によるもの
(Single Case)と出力、羽根車直径、羽根車出口
幅/間隙、圧縮密度比などのパラメータの関数とし
ての解析(Multiple Case)としてのものとが解析
できます。
この解析で作成した Input data fileは、
横振動解析(ROTLAT)の解析にリンク
して自動的に取り込まれます。空力不安
定力(バネ定数、減衰係数)が、ロータ
ダイナミックスのシミュレーションに
適用されます。

10
2-D グラフィックユーティリティ ARMDGraph
ARMDGraphは、Workspaceの概念を取り入れた単一又は複数グラフの出力表示をする
ためのグラフィックユー
テ ィ リ テ ィ で す 。
Workspace の 概 念 は
ARMDのソルバーで解析
されたグラフ出力表示で
ユーザ定義のプロットや
チャート表示のすべてを
処理できる環境を用意し
ます。Workspace の構成
は 2 つのパネルから成り
立っております。左のパネルは、ツリー構成でグラフ、チャート、グラフ出力ファイルを
示しています。右パネルは、すべてのチャートとグラフセッティングを示します。
ARMDGraphの特徴は次の通りです。
☆Workspaceの概念を持っている。これで表示されたグラフ出力はユーザーのカストマイズされたセッテ
ィングを含んで出力ファイルにリンクしている。
☆既存の Workspaceも新しいグラフィック出力に適用される。
☆新規のユーザーのグラフインターフェースは、カストマイズされたグラフにアクセスできる。
☆新しい File Format (*.usrx)は、既存の(*.usr)よりも多くのカストマイズが可能。
☆各グラフの中にさらに、それぞれチャートを含むことが可能
☆2つ以上の出力ファイルからのプロットが可能
☆RBTSGrafで作られたものも遡って適用可能
☆注記やラインマークのカストマイズが可能
☆グラフ出力ファイルの変更や更新を自動的に検知する。
☆プロットは、回転させたり、ビットマップやメタファイルとしてクリップボードにコピーが可能。
☆GUIのヘルプが利用できる。
☆メニューへのアクセスやチャート間の移動の加速キー
☆ウインドウごとの、リニア―、ポーラー、FFTなどの多様なプロットが可能
☆グラフの自動的な構成のためのテンプレートが用意されている。
☆カストマイズされたグラフオプションの次のような項目の保存/再現が可能
・Log、セミ Log、線形軸目盛 ・自動または手動メモリ設定
・Grid線の表示有無 ・凡例位置(隠す、中右、外右)
・曲線の、線表示、マーカーのみ表示、マーカー付線表示
・任意なタイトルのマクロによる自由な表示

11
ARMDGraphでは簡単な手順で、Workspaceをセットアップしたり、保存したり、ARMD
ソルバーでの解析のシミュレーション結果を以下に示すように表示することができます。

12
Rotor Dynamics (ROTLAT)
静的なあるいは動的な軸受ペデスタルの質量、剛性、減
衰特性を
考慮したシステムとしてのロータダ
イナミックス解析が、すべての横振
動解析に適用されます。
▲ユーザ指定の各軸受の支持剛性を
用いた解析
▲静的(周波数一定)または、動的(周
波数変動)な 軸受ペデスタルの入力値は、考慮有無でもその
まま保存される。
▲増強された能力(250軸受(各々42自由度)、40種回転速
度、40種外力、500材料、100モード形、
500セクション)での解析は、小は、心臓
ポンプから大は、大型発電セットまでの
解析が可能である。
▲Discの図示は、慣性モーメント(WR2)
比例表示
▲大きな剛性をカバーする解析点が使用
できて、Critical Speed Mapを
より正確に表示できる。

13
Rotor Dynamics (ROTLAT)つづき
▲ウエア―リングと空力連成項の不安定力の動特性への影響が、軸受の油膜効果と同じよ
うに横振動解析に取り入れられた。
▲材料特性の能力増強
モデル化された各要素の材料特性
(縦弾性係数 E、横弾性係数 G、密
度、材料減衰)を温度の変化による
影響と合わせて指定できる。
▲軸受支持剛性を考慮したロータ
ダイナミックシミュレーションの
ためのROTLATのユーザーインタ
ーフェイスとソルバーの修正

14
Rotor Dynamics (ROTLAT)つづき
▲時系列に従った軸受及び支持台への伝達動荷重の解析が新しく
過渡応答解析(RORESP)で自動的
行われる。結果はグラフで見ること
ができる。
すべての自重力、アンバランス力、
静的外力、動的外力が考慮される。
▲軸受及び機械基礎を含めた複合
系で伝達される静的、動的荷重の解
析シミュレーションが可能であり、すべての結果は一つの ARMDGraph の Workspace に
複合グラフとしてあるいは複合グラフを含んだ複合ウインドウとして統合されて示される。
▲数多くの改善 例えば、解析効率の向上のためのソルバーの改良、エラーメッセイジと
判定、丸め精度、ユーザーインターフェイスにおけるデホルトセッティング等々の改良。

15
ねじり振動(TORSION)
▲最近 TORSION に取り入れられた特徴は、発電機や誘導電動機で電気的に誘導される時
間変動する加振トルクの解析である。次のものを含んでいる。
発電機:
1.3相短絡
2.相間短絡
3.擬似短絡
電動機:
4.起動解析
5.3相短絡
6.2相短絡
7.高速再投入
▲ユーザー指定の時間変動加振トルクは、CSVファイルでトルクを与えることができる。
この特徴は、駆動系の任意の位置で任意の時間変動トルクを指定するときに使われる。(た
とえばクラッチ嵌脱のシミュレーション)
▲電気的加振、同期電動機トルク、ユーザー指定の時間変動外力トルク、と解析結果のト
ルク応答等がグラフ出力ファイルで示される。
▲能力増強
500材料、100モード形、
500セクション、
250バネ/軸受

16
軸受(油膜軸受)
▲ティルティングパッド軸受において油槽式
と直接噴射式に対する Pad温度、流量、損失動
力の解析のための個々の Pad に対するヒート
バランスをアップデートした。
▲すべてのモジュールに対して、Auto100の偏
心率/間隙の解析追加。
▲不当間隔 Pad配置のための Groove角度不等分布指定。
▲スラスト軸受で内外径方向の横漏れ量解析。
▲テンプレート設定のデホルト修正
▲すべてのモジュールで給油システムとチャンファーフロー、乱流の効果解析の見直し
以上の他、新しいヴァージョンでは、多数の改良が盛り込まれました。
以上
▲すべり軸受解析の能力増強
40から 100Padに増加、Post processor
で 100から 200ケース解析に増加
グリッド点の圧力指定点を 1000 点から
25000点に増加。
▲JURNBR と HYBCBR モジュールでテー
パーランド軸受の、ユーザーインターフェ
イス、ポストプロセッサー、3-D表示の修
正


















