analisis comparativo entre el PSS y el STATCOM en el amortigSistema máquina síncrona – barra...
120
ANÁLISIS COMPARATIVO ENTRE EL PSS Y EL STATCOM EN EL AMORTIGUAMIENTO DE OSCILACIONES JHONNY FDO. BERMÚDEZ CARVAJAL UNIVERSIDAD TECNOLÓGICA DE PEREIRA FACULTAD DE INGENIERÍAS ELÉCTRICA, ELECTRÓNICA, FÍSICA Y CIENCIAS DE LA COMPUTACIÓN PROGRAMA DE INGENIERÍA ELÉCTRICA PEREIRA 2008
Transcript of analisis comparativo entre el PSS y el STATCOM en el amortigSistema máquina síncrona – barra...

ANÁLISIS COMPARATIVO ENTRE EL PSS Y EL STATCOM EN EL
AMORTIGUAMIENTO DE OSCILACIONES
JHONNY FDO. BERMÚDEZ CARVAJAL
UNIVERSIDAD TECNOLÓGICA DE PEREIRA
FACULTAD DE INGENIERÍAS ELÉCTRICA, ELECTRÓNICA, FÍSICA Y
CIENCIAS DE LA COMPUTACIÓN
PROGRAMA DE INGENIERÍA ELÉCTRICA
PEREIRA
2008
ANÁLISIS COMPARATIVO ENTRE EL PSS Y EL STATCOM EN EL
AMORTIGUAMIENTO DE OSCILACIONES
JHONNY FDO. BERMÚDEZ CARVAJAL
Trabajo de grado para optar por el título de Ingeniero Electricista
Director
Ing. ALFONSO ALZATE
UNIVERSIDAD TECNOLÓGICA DE PEREIRA
FACULTAD DE INGENIERÍAS ELÉCTRICA, ELECTRÓNICA, FÍSICA Y
CIENCIAS DE LA COMPUTACIÓN
PROGRAMA DE INGENIERÍA ELÉCTRICA
PEREIRA
2008

Nota de Aceptación
Presidente del Jurado
Jurado
Jurado
Pereira, 6 de Mayo de 2008

i
A mi familia.

ii
AGRADECIMIENTOS
Agradezco a Dios por brindarme la oportunidad de realizar mis estudios
profesionales con el constante apoyo y cercanía de mi familia.
Agradecimientos especiales a mis Padres por su paciencia, al ingeniero
Alfonso Alzate por su colaboración en este proyecto, a los profesores y
compañeros que me han ayudado a cumplir mis metas académicas y a la
Universidad Tecnológica de Pereira.

iii
CONTENIDO
Página
Dedicatoria
Agradecimientos
Contenido
Lista de tablas
Lista de figuras
Glosario
1. INTRODUCCIÓN
1.1 Antecedentes
1.2 Objetivos
1.2.1 Objetivo general
1.2.2 Objetivos específicos
1.3 Estructura del contenido
2. MODELAMIENTO DEL SISTEMA
2.1 Introducción
2.2 Características de la máquina síncrona
2.3 Modelos de la máquina síncrona
2.4 Modelo no lineal del sistema
2.5 Modelo lineal del sistema
2.6 Condiciones iniciales
2.7 Amortiguamiento de modos de oscilación electromecánicos
2.7.1 Trayectoria torque-ángulo
2.7.2 Torque de sincronización
2.7.3 Torque de amortiguamiento
i
ii
iii
v
vi
ix
1
3
5
5
5
6
7
7
9
10
12
13
20
25
26
29
29

iv
3. SISTEMA DE POTENCIA CON ESTABILIZADOR
3.1 Introducción
3.2 Modos de oscilación del sistema eléctrico
3.2.1 Modo intraplanta
3.2.2 Modo local
3.2.3 Modo interárea
3.3 Objetivos del PSS
3.4 Estructura general del PSS
3.5 Diseño del estabilizador del sistema de potencia
3.5.1 Procedimiento de diseño usando el método del dominio de la
frecuencia
4. SISTEMA DE POTENCIA CON STATCOM
4.1 Introducción a los sistemas flexibles de transmisión de AC
4.2 Breve mención de los dispositivos FACTS
4.3 Convertidores
4.4 Compensador estático síncrono
4.5 Características del STATCOM
4.6 Modelo del STATCOM conectado a un sistema máquina síncrona –
barra infinita
4.7 Modelo lineal del sistema
4.8 Condiciones iniciales
4.9 Contribución del regulador de voltaje DC al amortiguamiento de
oscilaciones
5. SIMULACIONES Y RESULTADOS
5.1 Descripción del programa
5.2 Especificaciones de respuesta transitoria
5.3 Simulación no lineal
5.3 Simulación lineal
30
30
31
32
32
32
35
36
37
40
46
46
47
48
49
51
55
60
67
67
69
69
71
72
88

v
6. CONCLUSIONES
REFERENCIAS BIBLIOGRÁFICAS
ANEXO A
94
96
99
LISTA DE TABLAS
Tabla 5.1
Tabla 5.2
Tabla 5.3
Tabla 5.4
Comparación de tiempos, sobrepaso y error de estado
estacionario de la respuesta de voltaje en terminales del
generador
Eigenvalores de los sistemas linealizados con S=0.8 - j0.07
Eigenvalores de los sistemas linealizados con S=0.9 - j0.01
Sistemas con 0 D
77
91
92
93

vi
LISTA DE FIGURAS
CAPÍTULO 2
Figura 2.1
Figura 2.2
Figura 2.3
Sistema máquina síncrona – barra infinita
Diagrama de bloques del sistema lineal máquina infinita –
barra infinita
Diagrama fasorial para el cálculo de condiciones iniciales
12
19
20
CAPÍTULO 3
Figura 3.1
Figura 3.2
Figura 3.3
Figura 3.4
Figura 3.5
Conexión de dos sistemas a través de una línea de
transmisión
Estructura del PSS
PSS con velocidad como señal de entrada
Radio de amortiguamiento
Regulador de voltaje con PSS
33
37
37
42
45
CAPÍTULO 4
Figura 4.1
Figura 4.2
Figura 4.3
Figura 4.4
Figura 4.5
Circuito equivalente de un STATCOM
Topología de un VSC trifásico de dos niveles utilizando
IGBT
Característica V-I de un STATCOM
STATCOM conectado a un sistema máquina síncrona –
barra infinita
Figura 4.5 (a) Modelo del regulador de voltaje DC (b)
Modelo del regulador de voltaje AC
50
53
54
55
59

vii
CAPÍTULO 5
Figura 5.1
Figura 5.2
Figura 5.3
Figura 5.4
Figura 5.5
Figura 5.6
Figura 5.7
Figura 5.8
Figura 5.9
Figura 5.10
Figura 5.11
Figura 5.12
Figura 5.13
Interfaz de usuario
Especificaciones para un sistema con respuesta sub-
amortiguada
Modelo no lineal del sistema máquina síncrona – barra
infinita
Modelo no lineal del sistema máquina síncrona – barra
infinita con PSS
Modelo no lineal del sistema máquina síncrona – barra
infinita con STATCOM
Respuesta de voltaje en terminales del generador (a)
Sistema (b) Sistema con PSS (c) Sistema con STATCOM
(d) Comparación del sistema con PSS y con STATCOM
Vista detallada de la respuesta en terminales del
generador en estado estacionario
Respuesta del ángulo delta del generador (a) Sistema (b)
Sistema con PSS (c) Sistema con STATCOM (d)
Comparación del sistema con PSS y con STATCOM
Respuesta de la velocidad del generador (a) Sistema (b)
Sistema con PSS (c) Sistema con STATCOM (d)
Comparación del sistema con PSS y con STATCOM
Respuesta de voltaje en terminales del generador (a)
Sistema (b) Sistema con PSS (c) Sistema con STATCOM
(d) Comparación del sistema con PSS y con STATCOM
Respuesta del ángulo delta del generador (a) Sistema (b)
Sistema con PSS (c) Sistema con STATCOM (d)
Comparación del sistema con PSS y con STATCOM
Respuesta de la velocidad del generador (a) Sistema (b)
Sistema con PSS (c) Sistema con STATCOM (d)
Comparación del sistema con PSS y con STATCOM
Respuesta de voltaje en terminales del generador (a)
70
71
73
74
74
76
77
78
79
80
81
82

viii
Figura 5.14
Figura 5.15
Figura 5.16
Figura 5.17
Figura 5.18
Figura 5.19
Sistema (b) Sistema con PSS (c) Sistema con STATCOM
(d) Comparación del sistema con PSS y con STATCOM
Vista detallada de la respuesta en terminales del
generador en estado estacionario: sistema (azul), sistema
con PSS (negro), sistema con STATCOM (rojo)
Respuesta del ángulo delta del generador (a) Sistema (b)
Sistema con PSS (c) Sistema con STATCOM (d)
Comparación del sistema con PSS y con STATCOM
Respuesta de la velocidad del generador (a) Sistema (b)
Sistema con PSS (c) Sistema con STATCOM (d)
Comparación del sistema con PSS y con STATCOM
Modelo lineal del sistema máquina síncrona – barra
infinita
Modelo lineal del sistema máquina síncrona – barra
infinita con PSS
Modelo lineal del sistema máquina síncrona – barra
infinita con STATCOM
84
85
86
87
88
89
89

ix
GLOSARIO
CSI: Current Source Inverter
EPRI: Electric Power Research Institute
FACTS: Flexible Alternating Current Transmission Systems
FFS: Fundamental Frequency Switching
GTO: Gate Turn-Off Thyristor
IGBT: Insulate gate bipolar transistor
IGCT: Integred gate-commutated thyristor
PID: Proporcional – integral – derivative
PSS: Power System Stabilizer
PWM: Pulse Width Modulation
SMES: Superconducting Magnetic Energy Storage
SSSC: Static Synchronous Series Compensator
STATCOM: Static Synchronous Compensator
SVC: Static Var Compensator
TCR: Thyiristor Controlled Reactor
TSC: Thyiristor Switched Capacitor
UPFC: Unified Power Flow Controller
VSI: Voltage Source Inverter

1
1. INTRODUCCIÓN
La demanda de energía eléctrica continúa aumentando, especialmente en los
países que se encuentran en vías de desarrollo. Con los cambios políticos y
económicos generados por la globalización, los gobiernos han adoptado nuevas
estrategias de desarrollo basadas en la libre competencia buscando una industria
energética mucho más competitiva. La venta y compra de potencia mediante
contratos y su transporte por la red de transmisión agrava las condiciones de
operación, causando una cargabilidad impredecible de las líneas.
Bajo este escenario, los múltiples jugadores provocan que los actuales sistemas
de potencia sean operados cerca de los límites de estabilidad y estén
continuamente sujetos a perturbaciones, provocando desbalances que causan
oscilaciones de diferente magnitud en el ángulo del rotor de las máquinas
síncronas. Tales oscilaciones deben ser amortiguadas por los elementos de
control del sistema con el fin de evitar pérdida de sincronismo de las máquinas.
Estas oscilaciones pueden permanecer y crecer de manera que causen la
separación del sistema si no se tiene un amortiguamiento adecuado. Estos y otros
factores han sido muy importantes en el diseño y uso de dispositivos basados en
la electrónica de potencia, cuyo objetivo principal es proporcionar respaldo ante
cambios en la estructura de la red y perturbaciones severas.
Los sistemas de control de excitación y los estabilizadores del sistema de potencia
(PSS) son tecnologías fuertemente establecidas y con aplicaciones exitosas
alrededor del mundo. Aplicados correctamente, ofrecen la posibilidad de mejorar la
operación de los sistemas eléctricos de potencia, aumentando los márgenes de
estabilidad y asegurando la operación confiable de la red. Los sistemas de
excitación modernos para generadores de mediana y alta potencia son hoy casi

2
siempre suministrados con estabilizadores del sistema de potencia integrados.
Para Centrales existentes, donde no está planeada la sustitución completa del
sistema de excitación, hay muy buenas razones para incorporar al regulador de
tensión existente un PSS [9].
Por otra parte, la compensación de potencia reactiva ha tenido la atención tanto en
la parte académica como en la parte industrial debido a sus aplicaciones y también
al amortiguamiento de oscilaciones en los sistemas de potencia. Los sistemas de
compensación evolucionaron del uso de interruptores mecánicos y dispositivos
basados en tiristores (sistemas clásicos), a las aplicaciones actuales que utilizan
fuentes conmutadas de tensión (VSI) y corriente (CSI). Esta evolución ha
permitido mejorar las características de desempeño, así como ampliar el rango de
aplicaciones de los sistemas flexibles de transmisión AC (FACTS) [11].
Especialmente, en los últimos años se ha prestado considerable importancia a las
configuraciones de compensadores basados en inversores autoconmutados,
llamados Compensadores de Potencia Reactiva Avanzados o STATCOM (Static
Synchronous Compensator); cuyas aplicaciones abren nuevas oportunidades en el
control de la potencia y el incremento de la capacidad disponible.

3
1.1 ANTECEDENTES
Los sistemas de excitación antiguos se controlaban manualmente para mantener
el voltaje en terminales y la salida de potencia reactiva. Cuando el control de
voltaje fue automatizado por primera vez, era muy lento, y solamente remplazaba
un operario. Se reconoció entonces en estos sistemas, el potencial para mejorar la
estabilidad de pequeña y gran señal a través del uso de reguladores continuos y
de respuesta rápida. Desde ese punto en adelante se presta gran atención al
diseño y desarrollo de los sistemas de excitación, por lo que estos permanecen en
constante evolución.
El papel de los sistemas de excitación se expandió por medio de la suma de
señales auxiliares de estabilización; además a la señal error de voltaje en
terminales, para amortiguar oscilaciones del sistema por medio del control de
voltaje de campo. Esta parte del control de excitación se refiere como el
estabilizador del sistema de potencia (PSS, Power System Stabilizer), cuya
función básica es incrementar los límites de estabilidad, modulando la excitación
del generador para suministrar amortiguamiento a las oscilaciones del rotor del
generador. La combinación de una alta capacidad de esfuerzo de los devanados
de campo y el uso de señales de estabilización, contribuye sustancialmente a la
mejora de la respuesta dinámica general de los sistemas. Los sistemas de
excitación modernos son capaces de proveer una respuesta prácticamente
inmediata con altos voltajes de límite [16].
No obstante, en los últimos años se ha venido estudiando la utilización de
dispositivos estabilizadores FACTS (Flexible Alternating Current Transmission
Systems); que han mostrado capacidad de amortiguamiento de oscilaciones,
aunque son utilizados principalmente para la compensación reactiva. Fueron
desarrollados a nivel conceptual y práctico en gran parte por N. G. Hingorani y L.

4
Gyugyi, utilizándose por primera vez en el control de un sistema de transmisión de
AC en 1978 en un proyecto conjunto del EPRI (Electric Power Research Institute)
y la Minnesota Power and Light [19].
Con la aparición de los convertidores electrónicos de alta potencia basados en
GTO’s (Gate Turn-Off Thyristor), IGBT’s, (Insulate gate bipolar transistor), MTO’s
(MOS turn-off thyristor), IGCT (Integred gate-commutated thyristor) por mencionar
algunos, es posible generar o absorber potencia reactiva sin el uso de bancos de
capacitores o inductores. Esto condujo al desarrollo y la aplicación de la nueva
generación de dispositivos FACTS. El Compensador Estático de Reactivos (SVC)
se ha utilizado para la regulación del voltaje en sistemas de potencia, mediante el
control de la inyección de potencia reactiva. La evolución del SVC es el
STATCOM, que se basa en el principio de que un inversor de voltaje genera un
voltaje de AC controlable atrás de la reactancia de dispersión del transformador,
de modo que la diferencia de voltaje a través de la reactancia produce intercambio
de potencia reactiva entre el STATCOM y la red de transmisión [12].

5
1.2 OBJETIVOS
1.2.1 Objetivo general
Mediante el análisis de la operación de un sistema conformado por una máquina
síncrona conectada a un barraje infinito a través de una línea de transmisión,
comparar el efecto de el estabilizador del sistema de potencia (PSS) y de el
compensador estático síncrono (STATCOM) en el amortiguamiento de
oscilaciones.
1.2.2 Objetivos específicos
Obtener el modelo no lineal del sistema conformado por una máquina
síncrona conectada a un barraje infinito a través de una línea de
transmisión, con base en el modelo Heffron-Phillips.
Modelar el estabilizador del sistema de potencia (PSS) y el STATCOM.
Realizar una simulación lineal y no lineal del sistema bajo perturbaciones.
Comparar el efecto del PSS y el STATCOM en el amortiguamiento de
oscilaciones del sistema de potencia utilizado.

6
1.3 ESTRUCTURA DEL CONTENIDO
El presente trabajo de grado se encuentra conformado por seis capítulos:
El primero está dedicado a dar una descripción de los aspectos más importantes
que engloba el trabajo, los antecedentes, los objetivos y las consideraciones
hechas para la realización del mismo.
En el capítulo dos describe las temáticas de interés concernientes a la máquina
síncrona: la operación y el modelo matemático planteado por Heffron-Phillips y
luego por DeMello-Concordia, en el cual se calculan un conjunto de constantes
que dependen de los parámetros del sistema y del punto de operación. Luego, se
realiza el análisis de los modos de oscilación que afectan el sistema máquina
síncrona - barra infinita.
En el capítulo tres y cuatro se introducen de manera individual en el modelo del
sistema obtenido en el capítulo dos, el estabilizador del sistema de potencia (PSS)
y el STATCOM. Posteriormente, se desarrollan los modelos lineal y no lineal de
cada sistema.
En el capítulo cinco se muestran resultados de las simulaciones. La metodología
se fundamenta en el estudio y análisis individual del efecto del PSS y el
STATCOM en el amortiguamiento de oscilaciones y la estabilidad del sistema. Las
conclusiones respectivas son dadas en el capítulo seis.

7
2. MODELAMIENTO DEL SISTEMA
2.1 INTRODUCCIÓN
Como una manera sencilla de ver los efectos de una central con respecto al resto
del sistema eléctrico, el análisis de operación de un sistema conformado por una
máquina síncrona conectada a un barraje infinito a través de una línea de
transmisión para operación con pequeña señal, han sido planteados desde hace
algún tiempo y allí se han establecido los criterios básicos para garantizar la
estabilidad de pequeña señal [5].
Las expresiones que describen el comportamiento de la máquina síncrona son un
conjunto de ecuaciones diferenciales no lineales, con coeficientes dependientes
del tiempo ya que las inductancias propias y mutuas tanto del rotor como del
estator dependen de la posición angular del rotor.
Para evitar la complejidad en el manejo de las ecuaciones con las características
anteriormente mencionadas, se usa un método conocido como la "transformación
de PARK", en donde los voltajes, corrientes, y enlaces de flujo se expresan en
términos de sus componentes longitudinal, transversal y cero, mediante la
proyección de las variables originales en los ejes directo, en cuadratura y cero
(dirección axial de la máquina). Esta transformación permite eliminar la
dependencia de las inductancias y flujos con la posición angular del rotor.
Una vez obtenidas las ecuaciones de la máquina síncrona en los ejes directo,
cuadratura y cero, el siguiente paso es determinar la aplicación en la cual el
modelo va a ser utilizado. Por lo tanto, es necesario definir si el modelo es

8
expresado por medio de variables de estado o mediante funciones de
transferencia. Si se implementa el modelo por medio de variables de estado, se
tienen ventajas en cuanto a la solución por medio de diferentes técnicas
computacionales, las cuales permiten obtener una solución rápida y precisa.
Además, independiente de la extensión o complejidad del sistema el modelo
puede generalizarse para todas las máquinas síncronas, lo cual facilita su
planteamiento y solución. Las limitaciones en cuanto al orden del modelo
dependen de las presentadas por el programa y de la capacidad computacional.
Existen también algoritmos para la reducción de orden del sistema, lo que permite
en un momento dado despreciar las variables que no tienen mucha incidencia en
el resultado para el tipo de análisis dado. Si se va a desarrollar el modelo
mediante el uso de variables de estado, entonces se llega a una expresión de la
forma
! ! ! !UBXAX "#$%&
'() *
Siendo !X el vector de estados, !A la matriz de coeficientes de estado, !U el
vector de entrada y !B la matriz de los coeficientes de entrada. Una característica
importante del tratamiento del modelo por medio de variables de estado es que se
puede determinar si éste es o no estable, para una condición de operación dada,
hallando los valores propios de la matriz !A .
Al realizar la implementación del modelo de la máquina mediante las técnicas
clásicas usando funciones de transferencia, se tiene un modelo lineal simplificado
en el que puede darse la interpretación física adecuada para cada uno de los
bloques que conforman el modelo [1]. Este también se conoce como modelo
clásico.

9
2.2 CARACTERÍSTICAS DE LA MÁQUINA SÍNCRONA
La máquina síncrona tiene dos elementos esenciales: El campo y la armadura.
Usualmente, el campo está en el rotor y la armadura en el estator. El devanado de
campo es excitado con corriente continua. Cuando el rotor es impulsado mediante
un primomotor (turbina) el campo magnético rotatorio producido por el devanado
de campo induce tensiones alternas en los devanados trifásicos de la armadura.
La frecuencia de la tensión inducida y de las corrientes que fluyen por los
devanados del estator al conectarse una carga depende de la velocidad del rotor y
del número de polos de la máquina. La frecuencia de las cantidades eléctricas del
estator es entonces sincronizada con la velocidad mecánica del rotor, de allí la
denominación de máquina síncrona.
Cuando dos o más máquinas síncronas son interconectadas, los voltajes y
corrientes de todas las máquinas deben tener la misma frecuencia, y la velocidad
mecánica del rotor debe estar sincronizada a esta frecuencia también; por tanto,
los rotores de todas las máquinas interconectadas deben estar en sincronismo.
La disposición física (distribución espacial) de los devanados en el estator es tal
que la corriente alterna fluyendo en los devanados trifásicos produce un campo
magnético rotatorio tal que, en operación de estado estacionario, rota a la misma
velocidad del rotor. Los campos del rotor y el estator reaccionan entre sí y se
produce un torque (par) electromagnético debido a la tendencia de los dos campos
de alinearse entre sí. En un generador, este torque electromagnético se opone al
giro del rotor, de tal manera que debe aplicarse un torque mecánico en el rotor
mediante un motor primario (primomotor) para mantener la rotación.
El torque eléctrico (o potencia) entregado por el generador cambia sólo si se
cambia el torque entregado por el primomotor. El efecto de incrementar el torque

10
mecánico aplicado en el rotor es adelantar el rotor a una nueva posición relativa al
campo magnético giratorio del estator. Por el contrario, una reducción en el torque
mecánico aplicado retrasa la posición del rotor. En condiciones de operación en el
estado estacionario, el campo del rotor y el campo rotatorio del estator tienen la
misma velocidad. Sin embargo, existe una separación angular entre ellos
dependiendo de la potencia (o torque) de salida entregada por el generador.
En un motor síncrono, los papeles del torque eléctrico y mecánico se intercambian
con respecto a los del generador. El torque electromagnético sostiene la rotación
mientras que el mecánico se opone a ella. El efecto de incrementar la carga
mecánica es retardar la posición del rotor con respecto al campo giratorio del
estator.
En la discusión anterior los términos torque y potencia se han usado de forma
indiscriminada. La razón es que se asume la velocidad de la máquina constante
aún cuando se presentan pequeñas variaciones momentáneas por encima y
debajo de la velocidad síncrona. Cuando se toman sus valores en por unidad, los
valores del torque y la potencia son en efecto cercanamente iguales [1].
2.3 MODELOS DE LA MÁQUINA SÍNCRONA
Cada modelo es definido mediante un número que indica el número de ecuaciones
diferenciales que se utilizan. Entre más grande sea el número, mayor la
complejidad del modelo y mayor el esfuerzo computacional requerido para
resolver las ecuaciones diferenciales. El número del modelo es seguido por un
conjunto de términos entre paréntesis que define el orden de las ecuaciones
diferenciales usadas por el modelo. Se asume que todas las cantidades están
expresadas en por unidad (p.u.).

11
Modelo 6 ),,',','',''(******
+wEEEE qdqd . Se consideran los efectos subtransitorios y
transitorios en los ejes d y q, requiriendo cuatro ecuaciones diferenciales y las
ecuaciones de oscilación del modo mecánico.
Modelo 5 ),,',',''(*****
+wEEE qdq . En este modelo el efecto de pantalla de las
corrientes de Eddy en el rotor se desprecia tal que 0' #dE .
Modelo 4 ),,','(*
,
***
+wEE dq . Se desprecia el efecto de los devanados amortiguadores
del modelo 6. El modelo es ahora representado mediante las fuerzas
electromotrices transitorias dE ' y qE ' detrás de las reactancias transitorias dX ' y
qX ' . Este modelo se considera lo bastante preciso para analizar la dinámica de la
máquina.
Modelo 3 ),,'(***
+wE q . Este modelo es similar al 4, excepto que se considera
constante la f.e.m. transitoria de eje directo dE ' , por lo que la ecuación
correspondiente desaparece.
Modelo 2 ),(
.
**
+w . Este es el conocido como modelo clásico y es ampliamente
usado en estudios de la dinámica de la maquina sincrónica. En este caso se
asume que ni la corriente de eje directo dI , ni la f.e.m. interna fE representando la
tensión de excitación varían mucho durante un transitorio. El modelo es
representado mediante la ecuación de oscilación y una f.e.m. detrás de la
reactancia transitoria de eje directo.
La complejidad del modelo se incrementa en la medida en que se consideren los
efectos subtransitorios y transitorios, con sus reactancias correspondientes [1].

12
2.4 MODELO NO LINEAL DEL SISTEMA
Para fines de este proyecto, el sistema será el conformado por una máquina
sincrónica conectada a un barraje infinito. El modelo no lineal se tomó de [2] y es
el recomendado para analizar las oscilaciones de modo local en un rango de 1 a 3
Hz. El sistema puede expresarse mediante un conjunto de ecuaciones
diferenciales y algebraicas de la forma
),,( uyxfx #*
(2.1)
),(0 yxg# (2.2)
Siendo x el vector de estados, y el vector de variables algebraicas y g
representa las ecuaciones algebraicas del estator y de conexión a la red.
La máquina se conecta a través de una línea de transmisión, representada por
una reactancia eX y una resistencia eR , como se muestra en la figura 2.1.
Figura 2.1 Sistema máquina síncrona – barra infinita
La máquina se modela por las siguientes ecuaciones
))'('('
1' fddddq
do
q EIXXET
E --"-#*
(2.3)

13
sww -#*
+ (2.4)
)))()'('((2
sqddqqqms wwDIIXXIETH
ww -"""-#*
(2.5)
Donde H es la constante de inercia de la máquina. Asumiendo 0.sR , las
ecuaciones del estator están dadas por
0)( #-- /+senVIX tqq (2.6)
0')cos(' #--- ddtq IXVE /+ (2.7)
Donde tV es el voltaje en terminales del generador. Al sistema descrito, se le
adiciona un sistema de excitación IEEE-Type I
)( trefAfdfdA VVKEET -"-#*
(2.8)
2.5 MODELO LINEAL DEL SISTEMA
Tomando en cuenta el modelo propuesto en (2.1) y (2.2), se define el punto de
operación como 000 ,, uyx . Las variables perturbadas son
,0 xxx 0"# ,0 yyy 0"# .0 uuu 0"# Linealizando las ecuaciones (2.1) y (2.2)
uEyBxAx 0"0"0#0*
(2.9)
yDxB 0"0#0 (2.10)

14
Si D es invertible
xCDy 0-#0 -1 (2.11)
Por lo tanto
uExAuExCBDAx sis 0"0#0"0-#0 -*
)( 1 (2.12)
EDCBA ,,,, son los Jacobianos de las ecuaciones (2.1) y (2.2), evaluados en el
punto de operación. Para el voltaje en terminales del generador se tiene que
eej
t
j
qd VjVV/1+
#"- )
2(
)(
eejj
tqd VjVV)
2( 1+/ --
#" (2.13)
)cos()( /+/+ -"-#" ttqd jVsenVjVV (2.14)
Con )( /+ -# senVV td y )cos( /+ -# tq VV . Remplazando en (2.6) y (2.7)
0#- dqq VIX (2.15)
0'' #-- ddqq IXVE (2.16)
Asumiendo un ángulo de fase igual a cero en el barraje infinito
ee
j
qdj
qdjXR
VjVVjII
ee "
23-"#" 4
-- 0)(
)(
)2
(
)2
(
1+1+
(2.17)

15
ee
j
qd
qdjXR
VjVVjII
e"
-"#"
--
4
)2
()(
1+
(2.18)
Separando la ecuación (2.18) en parte real e imaginaria
+senVVIXIR dqede 4-#- (2.19)
+cos4-#" VVIRIX qqede (2.20)
Se linealiza alrededor de un punto de operación y se eliminan las variables
qdqd VVII ,,,, / . De (2.15) y (2.16)
$%
&'(
)
0"$
%
&'(
)
0
0$%
&'(
)
-#$
%
&'(
)
0
0
d
d
q
q
d
EI
I
X
X
V
V
'
0
0'
0 (2.21)
Linealizando las ecuaciones (2.19) y (2.20)
+++
0$%
&'(
)
-"$
%
&'(
)
0
0$%
&'(
) -#$
%
&'(
)
0
0
4
4
0
0cos
senV
V
I
I
RX
XR
V
V
q
d
ee
ee
q
d (2.22)
Igualando (2.21) y (2.22)
+++
0$%
&'(
)-"$
%
&'(
)
0#$
%
&'(
)
0
0$%
&'(
)
"
"-
4
4
0
0cos
'
0
)'(
)(
senV
V
EI
I
RXX
XXR
d
ede
qee (2.23)
Luego

16
$%
&'(
)
"-
"
0#$
%
&'(
)
"
"--
ede
qee
ede
qee
RXX
XXR
RXX
XXR
)'(
)(1
)'(
)(1
(2.24)
Donde el determinante es dado por
)')((2
deqee XXXXR """#0
Resolviendo para qd II 00 , en (2.23) se obtiene
$%
&'(
)0
0$%
&'(
)""
""-"
0#$
%
&'(
)0
0
44
44
+++++ q
edee
eqeqe
q
d E
XXVsenVRR
XXsenVVRXX
I
I '
)'(cos
)(cos)(1
00
00 (2.25)
Linealizando (2.3)-(2.5) e introduciendo la frecuencia normalizada sw
w#5
$$$$$
%
&
'''''
(
)
0
0
0
$$$$$
%
&
'''''
(
)
--
-
#
$$$$$
%
&
'''''
(
)
0
0
0
*
*
*
5
+
5
+
q
sq
s
do
qE
H
Dw
H
I
w
TE '
20
2
00
00'
1'
0
$%
&'(
)
0
0
$$$$$
%
&
'''''
(
)
---
--
"q
d
qdqdqd
q
dd
do
I
I
EH
IXXH
XXH
I
XXT
00
0'
2
1)'(
2
1)'(
2
00
0)'('
1
$%
&'(
)0
0
$$$$$
%
&
'''''
(
)
"m
fddo
T
E
H
T
2
10
00
0'
1
(2.26)

17
Sustituyendo qd II 00 , de (2.25) en (2.26)
fd
dodo
q
do
q ETT
KE
TKE 0"0-0
-#0
*
'
1
''
'
1' 4
3
+ (2.27)
5+ 0#0*
sw (2.28)
ms
q THH
Dw
H
KE
H
K0"0-0-0-#0
*
2
1
22'
212 5+5 (2.29)
Donde
0
"-"#
))('(1
1
3
eqdd XXXX
K (2.30)
!004 cos)()'(
++ eeqdd RsenXX
XXVK -"
0
-# 4 (2.31)
!00002 ')'())('(1
qedqdeeqqdqq ERIXXRXXXXIIK "--"--00
# (2.32)
6 7 !0001 cos)()'(1
++ eeqqdq RsenXXXXVIK -"-0
-# 4
6 76 7 !0000 cos)'(')'(1
++ senRXXEIXXV eedqdqd ""--0
" 4 (2.33)
De
22
qdt VVV "#
222
qdt VVV "#
qqddtt VVVVVV 0"0#0 000 222
q
t
q
d
t
dt V
V
VV
V
VV 0"0#0
0
0
0
0 (2.34)

18
Sustituyendo (2.25) en (2.21)
$%
&'(
)
0"$
%
&'(
)
0
0$%
&'(
)
""
""-"$%
&'(
)
-0#$
%
&'(
)
0
0
44
44
q
q
edee
eqeeq
d
q
q
d
E
E
XXVsenVRR
senXXVVRXX
X
X
V
V
'
0'
)'(cos
)(cos)(
0'
01
00
00
+++++
$%
&'(
)
0"$
%
&'(
)
0
0$%
&'(
)
""--"-
""
0#$
%
&'(
)
0
0
44
44
q
q
eqedeqd
edeqeq
q
d
E
E
senXXVVRXXXX
XXVsenVRXRX
V
V
'
0'
))(cos(')('
))'(cos(1
00
00
+++++
(2.35)
Sustituyendo (2.35) en (2.34)
qt EKKV '65 0"0#0 + (2.36)
Donde
!89:
;<=
""0
# 44 )'(cos1
00
0
05 edeq
t
d XXVsenVRXV
VK ++
!89:
;<=
"-0
" 44 00
0
0)(cos('
1++ senXXVVRX
V
Veqed
t
q (2.37)
0
0
0
0
0
06 )('
1
t
q
eqd
t
q
eq
t
d
V
VXXX
V
VRX
V
VK "
89:
;<=
"-0
# (2.38)
Las constantes llamadas 61 KK - fueron desarrolladas por Heffron-Phillips y por
DeMello-Concordia [20], para el estudio de oscilaciones locales de baja
frecuencia. Por último, se linealiza la ecuación del excitador (2.8)
)( trefAfdfdA VVKEET 0-0"0-#0*
(2.39)

19
El modelo completo de espacio de estado queda:
ref
A
A
fd
q
AA
A
A
A
s
s
dododo
fd
q
V
T
K
E
E
TT
KK
T
KKH
Dw
H
K
H
K
w
TT
K
TK
E
E
0
$$$$$
%
&
'''''
(
)
"
$$$$$$
%
&
''''''
(
)
0
0
0
0
$$$$$$$$
%
&
''''''''
(
)
---
---
--
#
$$$$$
%
&
'''''
(
)
0
0
0
0
*
*
*
*
0
0
0'
10
0222
000
'
10
''
1
'
56
12
4
3
5
+
5
+ (2.40)
Ahora las ecuaciones de la máquina y del excitador pueden ser colocadas en un
diagrama de bloques como se muestra en la figura 2.2
Figura 2.2 Diagrama de bloques del sistema lineal máquina infinita – barra infinita

20
2.6 CONDICIONES INICIALES
Aquí se establecen los pasos para calcular las condiciones iniciales de operación
del sistema a partir del conjunto de ecuaciones planteadas.
Paso 1
Se calcula la corriente >3Ig a partir de los datos dados por el flujo de carga P , Q
y /3tV ; donde el ángulo / es medido con respecto a la tensión del barraje
infinito, el cual es considerado como la referencia a un ángulo de cero grados.
Figura 2.3 Diagrama fasorial para el cálculo de condiciones iniciales
Si se considera que la máquina tiene conectada una carga local, entonces
PlPPg -# y QlQQg -# .
ee j
t
j
V
QlQjPlPIg
/
>
-
---#
)()(

21
Esta corriente está en el marco de referencia de la red y es igual a
ej
qd jII)
2(
)(1+ -
" .
Paso 2
+ es calculado como + = ángulo de ( eej
qs
j
t IgjXRV>/
)( "" ).
Paso 3
Calcular qdqd VVII ,,, para la máquina como
ej
qd IgjII)
2( 1+> "-
#"
ej
tqd VjVV)
2( 1+/ "-
#"
Paso 4
Calcular dE ' de
qqdsdd IXIRVE '' -"#
Paso 5
Calcular qE ' de
ddqsqq IXIRVE '' -"#

22
Paso 6
Calcular fdE
dddqfd IXXEE )'(' -"#
Paso 7
Con el voltaje de campo fdE conocido, refV y los estados del modo mecánico w y
mT se encuentran de las ecuaciones
A
fd
trefK
EVV "#
sww #
qddqqqddm IIXXIEIET )''('' -""#
Se debe recordar que para este modelo se considera 0.sR , qq XX '. y se
desprecia dE ' .

23
Ejemplo 2.1
De la figura 2.1, asumir puVpuVpuXR tee 23#323#3## 4 005.1,151,5.0,0 // .
Los datos de la máquina son:
377,0,39.0',5.2
,1.2,0,2.0,400,6.9',2.3
####
######
sdd
qsAAdo
wDpuXpuX
puXRsTKsTsH
1) Condiciones iniciales
23#23-23
#"#-
185443.05.0
005.1151)(
)2
(
jjIIIg ee
j
qd
j 1+>
)()0(_
Eángulo#+ donde eej
qs
j
t IgjXRVE>/
)(_
""#
23#23"23# 52.654788.1)185443.0)(1.2(151_
jE
Por lo tanto º52.65)0( #+
23##"--
48.425443.0)
2(
eejIgjII
j
qd>
1+. Así 4014.0#dI , 3676.0#qI
23##"--
48.391)
2(
eejj
tqd VjVV1+/
. Así 63581.0,77185.0 ## qd VV
7924.0)4014.0)(39.0(63581.0'' #"#"# ddqq IXVE

24
6394.14014.0)39.05.2(7924.0)'(' #-"#-"# dddqfd IXXEE
0041.1400
6394.11 #"#"#
A
fd
trefK
EVV
377#sw
5436.0)3676.0)(4014.0)(39.01.2()3676.0)(7924.0()'(' #-"#-"# qddqqqm IIXXIET
2) Cálculo de constantes 61 KK -
Remplazando en las ecuaciones dadas en (2.30) - (2.33) y (2.37) - (2.38)
9224.01 #K , 0739.12 #K , 3707.31
3
#K
, 2655.24 #K , 0050.05 #K , 3572.06 #K
La carga del sistema y los parámetros de la red externa como eX , afectan las
constantes 61 KK - . Generalmente estas son mayores que cero, pero bajo cargas
grandes, 5K empieza a volverse negativa, contribuyendo al amortiguamiento
negativo e inestabilidad, como se explicará a continuación.

25
2.7 AMORTIGUAMIENTO DE MODOS DE OSCILACIÓN
ELECTROMECÁNICOS
Por simplicidad, se asume 0#0 refV y que el excitador es una constante de
magnitud considerable AK . De la figura 2.2 se calcula la función de transferencia
doA
Aq
TsKKKK
KKKK
s
sE
'1
)(
)(
)('
363
543
""
"-#
0
0
+ (2.41)
Si 5K <0, consecuentemente 54 KKK A" <0, la realimentación de +0 a eT0
cambia de positiva a negativa y con una ganancia AK suficientemente grande, los
modos electromecánicos pueden moverse al semiplano derecho. La situación
cambia en detalles, pero no en sus aspectos generales si un modelo de excitador
más complejo es considerado. Así, un excitador écn-acting minimiza las
fluctuaciones de voltaje e incrementa el torque sincronizador, pero no garantiza
amortiguamiento. Tomando en cuenta la constante de tiempo AT
!)1)('1(
)1(
)(
)('
363
543
AdoA
AAq
sTsTKKKK
KKsTKK
s
sE
"""
""-#
0
0
+ (2.42)
La contribución de esta expresión a la trayectoria torque-ángulo es
)()(
)('
)(
)(2 sH
s
sEK
s
sTe q ?0
0#
00
++ (2.43)

26
2.7.1 Trayectoria torque-ángulo
La trayectoria torque-ángulo se muestra en la figura 2.4. Asumiendo 0#0 mT y
0.D , la frecuencia no amortiguada del lazo torque ángulo es dada por las raíces
de la ecuación característica
02
1
2 #" Ksw
H
s
(2.44)
srad
H
wKjs s
2
1
2,1 ! (2.45)
Figura 2.4 Trayectoria torque-ángulo
Con alto coeficiente de torque sincronizador 1K y bajo coeficiente de inercia H ,
las raíces 2,1s son grandes. 1K es una expresión complicada que involucra
condiciones de carga y reactancias externas. El valor de D es generalmente

27
pequeño y lo podemos despreciar. Para calcular el amortiguamiento debido a qE ' ,
el diagrama de bloques es mostrado en la figura 2.5.
Figura 2.5 Trayectoria torque-ángulo con otra función agregada
De la figura 2.5 se puede verificar que la función característica es dada por
0)(2
1
2 !"#"#" $$$ sHKsw
H
s
(2.46)
$")(sH por lo tanto contribuye al torque sincronizador y al torque de
amortiguamiento. A la frecuencia de oscilación de 1 a 3 Hz, se puede mostrar que
el efecto de 4K es despreciable. Despreciando el efecto de 4K , de la figura 2.2
AdodoA
A
A
TTsTK
TsKK
K
KKKsH
')'(1
)(2
3
6
3
52
####%! (2.47)
Con jws !
)'()'1
(
)(
3
2
6
3
52
doA
AdoA
A
TK
TjwTTwKK
K
KKKsH
##%#%! (2.48)

28
22
52 )()(
yx
jyxKKKsH A
#
%%!
Donde
AdoA TTwKKK
x '1 2
6
3
%#! (2.49)
)'(3
doA TK
Twy #! (2.50)
De 2.46, es claro que, a la frecuencia de oscilación, si & ')(Im jwH >0, implica
amortiguamiento positivo; las raíces se mueven al semiplano izquierdo. Si
& ')(Im jwH <0, tiende a hacer inestable el sistema y resulta en amortiguamiento
negativo. Así
& '22
52)(Reyx
xKKKjwH A
#%! (2.51)
Contribuye a la componente de torque de sincronización debido a )(sH .
& '22
52)(Imyx
yKKKjwH A
#! (2.52)
Contribuye a la componente de torque de amortiguamiento debido a )(sH .

29
2.7.2 Torque de sincronización
Para bajas frecuencias 0(w . De 2.51, para una alta ganancia AK
& '6
52
6
3
52
1)(Re
K
KK
KKK
KKKjwH
A
A %(#
%! (2.53)
La componente total de sincronización es 06
521 )%
K
KKK . 1K es usualmente
considerable, ya que incluso con 05 )K (baja a media impedancia externa y baja
a media carga), 06
521 )%
K
KKK . Con 05 *K (moderada a alta impedancia externa
y carga alta), el torque sincronizador es positivo.
2.7.3 Torque de amortiguamiento
& '22
3
52 )'(
)(Imyx
wTK
TKKK
jwH
doA
A
#
#
! (2.54)
Esta expresión contribuye con amortiguamiento positivo para 05 )K , pero
negativo para 05 *K . Además, con 05 *K y con una alta ganancia AK se
involucra problemas de estabilidad. Esto podría compensarlo en alguna medida el
amortiguamiento propio de la máquina D . Sin embargo, para introducir el
amortiguamiento necesario, un estabilizador del sistema de potencia debe ser
incorporado. La señal estabilizadora puede ser +" , accP" o una combinación de
ambas.

30
3. SISTEMA DE POTENCIA CON ESTABILIZADOR
3.1 INTRODUCCIÓN
El estabilizador del sistema de potencia más comúnmente conocido como PSS, es
el encargado de amortiguar los efectos de las oscilaciones que se presentan
cuando alguna perturbación actúa sobre el sistema eléctrico de potencia. Dichas
oscilaciones se producen alrededor del punto de operación y si no son controladas
pueden volverlo inestable. Su función básica es la de extender los límites de
transferencia de potencia del sistema aplicando una señal de control
suplementario a través del sistema de excitación, para que se produzca una
componente del torque eléctrico en fase con la velocidad, que se encargue de
amortiguar las oscilaciones del ángulo de par. Se debe tener en cuenta que el
estabilizador suministra amortiguamiento para las excursiones de pequeña señal
alrededor del punto de operación, o sea que permite la recuperación del sistema
luego de que se presenta una pequeña perturbación.
Los criterios de diseño y ajuste dependen de la señal o señales que se apliquen a
su entrada. Sin embargo, cualquiera que sea la o las escogidas, la función de
transferencia del estabilizador debe compensar el retraso de fase del generador,
sistema de excitación y sistema de potencia. La función de transferencia del
sistema depende fuertemente del punto de operación del generador, de la
ganancia del regulador y del sistema de potencia por lo que el estabilizador debe
ajustarse en un punto que represente una condición de operación crítica, de tal
manera que trabaje en la forma adecuada en un buen margen de variación de las
condiciones de operación.

31
Puesto que un mal ajuste del PSS puede provocar problemas mayores a los que
se quieren solucionar, es muy importante tener un amplio conocimiento acerca de
su diseño, funcionamiento y métodos de ajuste.
Como las oscilaciones del sistema ocurren sobre un rango de frecuencias
relativamente amplio, se hace necesario dividirlo para establecer los alcances de
lo que se denominan los modos de oscilación. Esta división es muy importante
para comprender cuales van a ser las consecuencias de ajustar la operación del
estabilizador en diferentes puntos del rango de frecuencia y tener una mejor
apreciación de sus efectos sobre las oscilaciones del sistema [1].
3.2 MODOS DE OSCILACIÓN DEL SISTEMA ELÉCTRICO
Cuando un sistema eléctrico de potencia está interconectado, aparecen,
dependiendo de su tamaño diferente modos de oscilación, los cuales pueden
presentarse aún en forma simultánea. Las oscilaciones se presentan cuando los
rotores de las máquinas, comportándose como cuerpos rígidos, oscilan con
respecto a los demás usando las líneas de transmisión entre ellos como el enlace
para intercambiar energía. El rango de frecuencias de interés de estas
oscilaciones para el estudio de la estabilidad dinámica está entre los 0.1 y 3.0
ciclos. Para el análisis y control de la estabilidad dinámica pueden considerarse
varios tipos de oscilaciones, agrupados en tres amplias categorías que se
especifican a continuación [1].
32
3.2.1 Modo intraplanta
En este caso aparecen oscilaciones entre las diferentes unidades de una misma
central como consecuencia de la interacción entre sus controles. Es recomendable
que un estabilizador no responda a éstas, cuyo rango, relativamente alto, está
entre los 1.5 y 3.0 ciclos ya que esto disminuye su habilidad para ensanchar los
límites de potencia de la planta. La frecuencia del sistema es mucho menos
sensible a este modo de oscilación que la velocidad o la potencia.
3.2.2 Modo local
Aquellas que aparecen cuando las unidades de una central generadora oscilan
con respecto al resto del sistema de potencia. Estas se conocen como las
oscilaciones en modo local de la planta y las frecuencias de interés están en el
rango 0.8 a 2.0 ciclos.
3.2.3 Modo interárea
Tiene que ver con las oscilaciones entre un conjunto de máquinas en un sector
con otro conjunto de máquinas en otro sector. Estas son denominadas como
oscilaciones interárea y su rango de frecuencia está entre 0.1 y 0.7 ciclos. La
razón por la cual su rango de frecuencia es menor se encuentra analizando el
caso más simple que es el dos sistemas interconectados.

33
Figura 3.1 Conexión de dos sistemas a través de una línea de transmisión
En este caso la inercia equivalente del sistema es 21
21
MM
MMM eq #
! .
Por tanto las mayores inercias combinadas de los grandes grupos y las mayores
reactancias efectivas de las líneas de interconexión entre sistemas hacen que el
rango de frecuencia de las oscilaciones interárea sea más pequeño.
La anterior clasificación puede ilustrarse con la ayuda de la figura 3.1, en la que se
muestran dos áreas conectadas a través de un enlace débil (línea de transmisión
alterna larga). El área 2 está conformada por el generador 4, mientras que el área
1 contiene los generadores 1, 2 y 3. Los generadores 1 y 2 son conectados en
paralelo y participan en las oscilaciones intraplanta, las cuales tienen una
frecuencia más alta debido a la menor reactancia entre las dos máquinas y a
menores inercias. En el modo de oscilación local, 1 y 2 oscilan conjuntamente con
respecto a 3. En las oscilaciones interárea participan todos los generadores y es la
que presenta la más baja frecuencia. La función básica del estabilizador del
sistema de potencia es la de amortiguar todos los modos de oscilación del
sistema, dándole mayor prelación al modo para el cual fue diseñado y ajustado.
Entre las frecuencias extremas de los modos de oscilación local e interárea
pueden aparecer otros modos que se encuentran ante todo en sistemas
débilmente interconectados. Estos resultan de las oscilaciones entre las unidades
individuales dentro de un sistema y tienden a comportarse en forma similar al
modo de oscilación local ya que una gran parte de las oscilaciones de potencia

34
son experimentadas por unas pocas unidades. En muchos casos éstos modos se
tratan como si fueran modos de oscilación local.
En general es usual que un generador participe en varios modos de oscilación, por
lo que el ajuste del PSS debe ser tal que sea capaz de amortiguar el modo para el
cual fue diseñado, sin que afecte en forma adversa los otros modos existentes.
Cuando una unidad es dominante en modo local, su estabilizador tiene un fuerte
impacto en amortiguar las oscilaciones de ese modo. En contraste con lo anterior,
una sola unidad experimenta sólo una porción de la magnitud total de las
oscilaciones de potencia en el modo interárea en forma proporcional a la
capacidad de generación de potencia del área de la cual forma parte. Por lo tanto
el PSS debe diseñarse para producir el amortiguamiento de las oscilaciones en
modo local bajo cualquier condición de operación y en particular aquellas que
presentan al generador bastante cargado y el enlace de transmisión débil, y
simultáneamente debe contribuir al amortiguamiento de los otros modos de
oscilación, o al menos no afectarlas en forma adversa.
Existen otros modos de oscilación que también pueden ser influenciados por el
PSS como son las llamadas oscilaciones torsionales y un modo de control llamado
modo de la excitación, el cual está asociado con el sistema de excitación y el
circuito de campo.
El fenómeno de las oscilaciones torsionales está relacionado con el conjunto de
masas écnica del sistema las cuales están débilmente acopladas al mundo
externo a través del campo magnético y la reactancia del sistema a la salida del
generador. Estas oscilaciones torsionales en el eje representan la transferencia de
energía entre diversos puntos del conjunto rotatorio, y tratan de crecer a valores
excesivos cuando la velocidad es usada como señal estabilizadora. La mayoría
del ruido en la señal de velocidad es debido a esas oscilaciones. Por eso es muy

35
importante que exista un filtro para que reduzca el ruido en la señal medida,
originado por ellas.
3.3 OBJETIVOS DEL PSS
El diseño del control de la excitación suplementario para el sistema de potencia
tiene como objetivos los siguientes:
Maximizar el amortiguamiento del modo de oscilación local y otros modos
sin comprometer la estabilidad del sistema a cualquiera de ellos.
Ampliar los límites de estabilidad del sistema de potencia, puesto que al
disminuir las oscilaciones de potencia, se incrementan los niveles de
transferencia de potencia a través de la línea de transmisión en forma
confiable.
No afectar en forma adversa el comportamiento del sistema cuando se
presenten grandes variaciones (transitorios). O sea, la presencia del PSS
no debe tener un efecto nocivo sobre la estabilidad transitoria del sistema.
Minimizar las consecuencias debidas al mal funcionamiento del sistema de
excitación cuando se presenten fallas en alguno de sus componentes.

36
3.4 ESTRUCTURA GENERAL DEL PSS
Las partes que conforman el PSS son mostradas en la figura 3.2, y ellas son:
El sensor
Es el elemento encargado de monitorear la variable que sirve como señal de
entrada al PSS. Casi siempre se desprecia su retardo por ser muy pequeño
comparado con las demás constantes de tiempo.
Filtro torsional
Tiene como función rechazar el ruido torsional de alta frecuencia.
Red de adelanto de fase
Compensa los retardos del sistema, o sea, el generador, el sistema de excitación y
la red. Dependiendo del retraso introducido pueden ser una o varias redes. Este
circuito tiene un término de ganancia con el que se determina la cantidad de
amortiguamiento requerido por el sistema.
Filtro Washout
Este elemento evita la desviación permanente del voltaje en terminales. Garantiza
que el PSS sólo se active ante transitorios de la señal de entrada. Es
esencialmente un filtro pasa-alto y debe dejar pasar todas las frecuencias que son
de interés.

37
Límites
Previenen cambios excesivos en la señal de salida del estabilizador )( SV y por
tanto en el voltaje terminal )( tV , durante rechazos de carga y evitan la disminución
del refuerzo de excitación para no afectar la estabilidad transitoria.
Figura 3.2 Estructura del PSS
3. 5 DISEÑO DEL ESTABILIZADOR DEL SISTEMA DE POTENCIA
La señal estabilizadora derivada de la máquina (velocidad, frecuencia o potencia)
es procesada por el PSS con una función de transferencia )(sG y su salida es
conectada a la entrada del excitador. La figura 3.3 muestra el PSS con la
velocidad como señal de entrada [2].
Figura 3.3 PSS con velocidad como señal de entrada

38
De la figura 3.3 la contribución del PSS a la trayectoria torque-ángulo es
(asumiendo 0," refV y 0,"$ )
AdodoA
A
A
AdoA
APSS
TTsTK
TsKK
K
KKsG
sTTsKKKK
KKKsGT
')'()1
(
)(
)1)('1(
)(
2
3
6
3
2
363
32
####!
###!
"
"
+
)()( sGEPsGTPSS !"
"
+ (3.1)
Para un rango usual de constantes, la expresión anterior puede aproximarse a
)1))('
(1)(1
(
)(
6
6
3
2
A
A
doA
APSS
sTKK
TsKK
K
KKsGT
###(
"
"
+ (3.2)
Para un alto valor de AK , puede ser aproximada a
)1))('
(1(
)(
6
6
2
A
A
do
PSS
sTKK
Ts
sG
K
KT
##(
"
"
+ (3.3)
Si esta fuera para proveer puro amortiguamiento por todo el rango de frecuencia,
)(sG debería ser una función de adelanto con ceros
)1))('
(1()(6
A
A
doPSS sT
KK
TsKsG ##!
Donde PSSK es la ganancia del PSS. Tal función no es físicamente realizable. Esta
función de tipo adelanto-atraso proporciona adelanto de fase sobre el rango de
39
frecuencia esperado. Para propósitos de diseño, )(sG es de la forma
)()1()1)(1(
)1)(1()( 1
42
31 sGKsT
sT
sTsT
sTsTKsG PSS
W
WPSS !
###
##! (3.4)
Las constantes de tiempo 4321 ,,, TTTT son puestas para proporcionar
amortiguamiento sobre el rango de frecuencias a las cuales las oscilaciones
comúnmente ocurren. Sobre este rango, ellas deben compensar el atraso de fase
introducido por la máquina y el regulador. Algunos valores típicos de estos
parámetros son:
PSSK está en el rango de 0.1 a 50.
1T es una constante de tiempo de adelanto, 0.2 a 1.5 s.
2T es una constante de tiempo de atraso, 0.02 a 0.15 s.
3T es una constante de tiempo de adelanto, 0.2 a 1.5 s.
4T es una constante de tiempo de atraso, 0.02 a 0.15 s.
La ganancia del estabilizador es obtenida primero encontrando la ganancia a la
cual el sistema se vuelve inestable. Esta se puede obtener mediante pruebas,
colocando PSSK a PSSK -
3
1, donde PSSK - es la ganancia a la cual el sistema se
vuelve inestable. PSSK también puede hallarse calculando por las raíces del
sistema. WT es llamada constante de tiempo washout y su propósito es asegurar
que no halla error de estado estacionario de voltaje de referencia debido a la
variación de la velocidad.
Es importante evitar interacción entre el PSS y los modos de vibración torsional.
El análisis ha revelado que tal interacción puede ocurrir en casi todos los sistemas

40
de excitación modernos con alta ganancia a altas frecuencias. La inestabilidad
debido a las oscilaciones torsionales puede resultar en el daño del eje,
particularmente en pequeños generadores donde el amortiguamiento es pequeño.
Incluso si el daño en el eje no ocurre, tal inestabilidad puede causar saturación de
la salida del estabilizador y del regulador de voltaje, provocando que estos sean
inefectivos y resultando en pérdidas de sincronismo. Es imperativo que el
estabilizador no induzca inestabilidad torsional. Por tanto, el PSS es puesto en
serie con un filtro de función de transferencia )(sFILT . Un valor típico de esta
función es 235570
570)(
sssFILT
##( . La función de transferencia completa del PSS
es )()( sFILTsG .
3.5.1 Procedimiento de diseño usando el método del dominio de la
frecuencia
De la figura 3.3
)()( sGsGEPTPSS !"
"
+ (3.5)
Donde )(sGEP de (3.1) es
)1)('1()(
363
32
AdoA
A
sTKsTKKK
KKKsGEP
###! (3.6)
Paso 1
Despreciando el amortiguamiento debido a otras fuentes, se encuentra la

41
frecuencia natural no amortiguada nw en rad/segundo de la trayectoria torque
ángulo.
02
1
2 !# Ksw
H
s
, njws !2,1 , donde H
wKw sn
2
1! (3.7)
Paso 2
Se calcula el atraso de fase de )(sGEP haciendo jws ! en (3.6).
Paso 3
Se ajusta el adelanto de fase de )(sG en (3.5) tal que
0|)(|)( !#.. !! nn jwsjws sGEPsG (3.8)
Con
k
PSSsT
sTKsG //
0
1223
4
#
#!
2
1
1
1)( (3.10)
Se ignora el filtro washout pues su contribución neta de fase es aproximadamente
cero. 21 ók ! con 21 TT ) . Si 1!k :
)(11 21 nnn jwGEPTjwTjw .%#.!#. (3.11)
Conociendo nw y )( njwGEP. , se calcula 1T . 2T se puede escoger como un valor
entre 0.02 y 0.15 segundos.

42
Paso 4
Para calcular PSSK , se calcula primero PSSK - , la cual es la ganancia en que el
sistema se vuelve inestable, y luego hacemos PSSPSS KK -!3
1. Un procedimiento
alternativo es diseñar para un radio de amortiguamiento 5 . En el sistema de
segundo orden, cuya ecuación característica es
02
1
2 !## KDssw
H
s
(3.12)
El radio de amortiguamiento es 12 MK
D!5 , donde
sw
HM
2! . Este radio se
muestra en la figura 3.4.
Figura 3.4 Radio de amortiguamiento
Las raíces de (3.12) son

43
M
K
M
Dsi
M
D
M
Kj
M
DM
K
M
D
M
D
s 1
22
1
1
2
2,1
4
222
4
*/0
123
4/0
123
4% %!
%/0
123
4 %
%!
2
2,1 1 55 % %! nn jwws
Nótese que M
Kwn
1! . Por lo tanto
MK
D
M
K
M
D
wM
D
n 1
1
222!!!5 (3.13)
Se puede verificar que
2
1
2
122
24/0
123
4!6!M
D
MK
D
M
Kwn 5
El adelanto de fase de )(sG cancela el atraso de fase debido a )(sGEP , a la
frecuencia de oscilación. La contribución del PSS a través de )(sGEP es de puro
amortiguamiento con un coeficiente PSSD . Así, ignorando de nuevo la contribución
de fase del filtro washout
||)(|||)(| 1 nn jwsjwsPSSPSS sGsGEPKD !!! (3.14)
Por tanto, la ecuación característica es
012 !##M
Ks
M
Ds PSS (3.15)

44
También
0222 !## nn wsws 5
Resultando
|)(||)(|2 1 nnPSSnPSS jwGjwGEPKMwD !! 5 (3.16)
Se puede encontrar PSSK , conociendo nw y el deseado 5 . Una razonable opción
es escoger un valor entre 0.1 y 0.3.
Paso 5
El PSS deberá ser activado solo cuando bajas frecuencias de oscilación son
desarrolladas y deberá ser desactivado automáticamente cuando las oscilaciones
en el sistema cesan. Esto no interferirá con la función regular del sistema de
excitación durante la operación en estado estacionario a la frecuencia del sistema.
La etapa washout tiene por función de transferencia
W
WW
sT
sTsG
#!
1)( (3.17)
El filtro washout no debe tener ningún efecto de cambio de fase o ganancia a la
frecuencia de oscilación. Esto se puede lograr escogiendo un valor grande de WT
para que 1)( (nW jwG . Así la contribución es casi cero. El PSS no tendrá ningún
efecto sobre el sistema en estado estacionario, ya que en estado estacionario
0!"+ .

45
Figura 3.5 Regulador de voltaje con PSS
La entrada para el estabilizador es +" , como se aprecia en la figura 3.5. Se
introduce el PSS al modelo con solo una etapa de adelanto – atraso y se omite la
etapa washout, ya que su objetivo es solo compensar el error dc de estado
estacionario. Una ecuación de estado extra debido al PSS es adicionada al
sistema
1
2 2 2
1 PSSPSS
K Ty y K
T T T+ +
7 7
" ! % " # " # "
1 2 1
2 2 2
1( ' )
2 2 2
PSS sPSS q
K DwT K Ky y K E
T T T H H H+ $
7
" ! % " # " # % " % " % (3.18)
La matriz de estado A para el modelo de la máquina con PSS queda
4
3
2 1
6 5
2 1 1 1
2 2 2 2
1 10 0
' ' '
0 0 377 0 0
0 0 02 2
10
10
2 2 2
do do do
A A A
A A A A
PSS PSS PSS s
K
K T T T
K K
A H H
K K K K K
T T T T
K K K DwK T K T
T H T H T H T
8 9% %: ;: ;: ;: ;: ;% %
! : ;: ;: ;% % %: ;: ;4 1 4 1: ;% % % %2 / 2 /: ;3 0 3 0< =
(3.19)

46
4. SISTEMA DE POTENCIA CON STATCOM
4.1 INTRODUCCIÓN A LOS SISTEMAS FLEXIBLES DE TRANSMISIÓN DE AC
Los sistemas de potencia convencionales, especialmente las líneas de
transmisión, se dice que son inflexibles debido a que ofrecen poca posibilidad de
control en el flujo de potencia como consecuencia de que los parámetros y la
configuración de la red son fijos [19]. Además, la red tiene una respuesta lenta
ante contingencias, lo cual dificulta el control del flujo de potencia del sistema en
términos de velocidad y versatilidad. Esto se debe a que los sistemas eléctricos de
potencia en la actualidad están primordialmente controlados por elementos
mecánicos, que son lentos y requieren mantenimiento continuo debido a que
sufren desgaste.
El flujo de potencia entre dos puntos a través de una línea de transmisión sin
pérdidas está dado por la siguiente relación
( )ijij i j
ij
senP VV
X
>!
DondeijP es la potencia real o activa transferida a través de la línea de
transmisión que conecta los nodos i j% , iV y jV corresponden a la magnitud del
voltaje en los nodos i j% ,ij> es la diferencia angular entre los nodos terminales y
ijX es la reactancia de la línea de transmisión. De esta expresión se puede
observar que la potencia que fluye por una línea depende de los parámetros
físicos de la red: voltaje en los extremos de la línea, reactancia de la línea y la

47
diferencia angular entre los voltajes extremos. En sistemas de potencia
convencionales el parámetro ijX no es controlable; sin embargo, es posible
ajustar dentro de un margen estrecho los parámetros iV ,jV y
ij> para controlar el
flujo de potencia.
La filosofía de los sistemas flexibles de transmisión de corriente alterna (FACTS),
es utilizar dispositivos electrónicos basados en diodos, tiristores y GTO (gate turn-
off thyristor) para modificar los parámetros descritos y con ello controlar el flujo de
potencia en una línea de transmisión. Esta circunstancia permite utilizar las líneas
cerca de sus límites térmicos o forzar los flujos de potencia por rutas
determinadas.
Los tiristores presentan ventajas sobre los dispositivos de conmutación
mecánicos, como la capacidad de conmutar mucho más rápido, además de poder
utilizarse para redireccionar la potencia en una fracción de ciclo. Esta ventaja
permite, por ejemplo, amortiguar oscilaciones de potencia, lo cual no puede
lograrse con el empleo de controladores mecánicos. Además, los dispositivos de
conmutación mecánicos tienden a desgastarse, mientras que los controladores
basados en tiristores pueden conmutar dos veces cada ciclo sin deteriorarse.
Debido a la rapidez en su operación, estos dispositivos también pueden ser
utilizados para impactar positivamente los problemas dinámicos del sistema [19].
4.2 BREVE MENCIÓN DE LOS DISPOSITIVOS FACTS
A continuación sólo se hace mención de los dispositivos FACTS más estudiados y
empleados hasta el momento, sin descartar otros más mencionados en la
literatura.

48
Controladores FACTS basados en tiristores convencionales [8]:
a. Thyiristor Controlled Reactor (TCR).
b. Static Var Compensator (SVC).
c. Thyiristor Switched Capacitor (TSC).
Controladores FACTS basados totalmente en dispositivos semiconductores (en
esta clase de FACTS se emplean dispositivos como IGBT y GTO):
a. Static Synchronous Compensator (STATCOM).
b. Static Synchronous Series Compensator (SSSC).
c. Unified Power Flow Controller (UPFC).
4.3 CONVERTIDORES
Un convertidor es un elemento que convierte la potencia eléctrica de corriente y
tensión determinada a otra forma de corriente y tensión. Los convertidores
electrónicos se pueden implementar de dos formas [11]:
Fuentes de tensión (Voltage Source Inverter, VSI)
Solo se pueden construir con válvulas de apagado controlado; ellos poseen un
lado DC donde el voltaje no cambia de polaridad, pero la corriente fluye en
cualquier dirección, para generar de allí tensión AC. Esta tensión puede ser
variada en magnitud, frecuencia y ángulo de fase. Hasta hoy los convertidores VSI
han probado ser más prácticos y económicos, por lo cual es el tipo de convertidor
preferido en los FACTS actuales. Los sistemas VSI trifásicos generan la tensión
AC de dos formas, bien sea por modulación de ancho de pulso (Pulse Width

49
Modulation, PWM), o por suicheo a frecuencia fundamental (Fundamental
Frequency Switching, FFS).
Fuentes de corriente (Current Source Inverter, CSI)
Generan una corriente AC a partir de la fuente de corriente DC. Pueden ser
construidos con válvulas convencionales (ejemplo: los rectificadores), o en
estructuras avanzadas con válvulas con apagado controlado (ejemplo: sistemas
Superconducting Magnetic Energy Storage, SMES). Las aplicaciones de CSI
avanzados están aún en etapas de desarrollo, o al nivel de prototipos avanzados
en laboratorio.
4.4 COMPENSADOR ESTÁTICO SíNCRONO
El STATCOM (Static Synchronous Compensator) es un convertidor VSI trifásico, el
cual produce un conjunto de tres tensiones de salida con frecuencia, relación de
fase y magnitud ajustable; cuya conexión a un sistema se realiza a través de una
reactancia, usualmente la de dispersión de un transformador de acople [11]. Este
dispositivo se instala en derivación con un nodo de transmisión y se usa
principalmente para regular el voltaje en los sistemas de transmisión.
El STATCOM proporciona una compensación en paralelo de manera muy similar a
los SVC (Static Var Compensator), pero utiliza un convertidor de fuente de voltaje
en lugar de reactores y capacitores en paralelo. Por consiguiente, incorpora en su
estructura una parte de electrónica de potencia, aunque la parte principal la
compone solamente un capacitor y un transformador. Esto lleva a una
construcción modular compacta, que puede ser fácilmente transportado al lugar de
su instalación y si fuese necesario, también de fácil relocalización. La estructura

50
fundamental del dispositivo STATCOM se muestra en la Figura 4.1.
Figura 4.1 Circuito equivalente de un STATCOM
1 2VVP sen
X>! (4.1)
2
1 2 1cosVV VQ
X
> %! (4.2)
El convertidor produce un voltaje de frecuencia fundamental 2V que está en fase
con el voltaje del sistema de potencia 1V . Como 2V y 1V están en fase, la diferencia
entre ellos resulta en una corriente reactiva I fluyendo a través de la reactancia
X del transformador, esto es 1 2( ) /I V V jX! % .
Si 2V > 1V entonces I se adelanta a 1V , entregándose potencia reactiva al nodo de
conexión y el convertidor se comporta como un gran capacitor. Por el contrario, si
2V < 1V entonces I se atrasa de 1V y se absorbe potencia reactiva del nodo y el
convertidor actúa como un reactor [14].

51
Cuando el ángulo es positivo ( 0> ) ) se carga el condensador y 0Q ) ; por el
contrario si éste es negativo ( 0> * ) se descarga el condensador y 0Q * , y si el
ángulo es nulo ( 0> ! ) se mantiene la tensión del condensador y 0Q ! . Si el
ángulo no es nulo, el STATCOM absorbe o entrega potencia activa al sistema,
dependiendo de 1V , 2V y X . Al carecer de fuente interna de energía, un
STATCOM solo puede intercambiar potencia reactiva y su ángulo debe ser cero
( 0> ! ). La magnitud de 2V (la tensión interna generada) no depende de la tensión
del sistema, así el STACOM posee una característica que lo hace útil aún en
condiciones de colapso. El STATCOM es de gran utilidad para amortiguar
oscilaciones electromecánicas cuando se usa para el control de voltaje y como
compensador de potencia reactiva [11].
4.5 CARACTERÍSTICAS DEL STATCOM
En lo que respecta al área de los dispositivos semiconductores, los avances que
se han logrado en los últimos años se han visto reflejados en la creación de
componentes tales como el gate turn-off thyristor, (GTO), o el insulated gate
bipolar transistor, (IGBT). Estos elementos son los que comúnmente se utilizan en
los procesos internos de disparo que están involucrados en el funcionamiento de
los FACTS de la nueva generación, como es el caso del STATCOM.
El GTO es una versión más avanzada del tiristor convencional, ambos tienen una
característica similar de encendido, pero el GTO tiene la capacidad particular de
apagarse a un tiempo diferente que el establecido naturalmente por la corriente.
Este aspecto de su funcionamiento en particular le ha valido tener nuevas
aplicaciones en el sector industrial y aún en sistemas de potencia, donde se tiene
la facultad de controlar niveles de flujos de carga de hasta megawatts.

52
Por otro lado, el IGBT es uno de los dispositivos más desarrollados en la familia de
los transistores de potencia y ha tenido una amplia aplicación en el control de
motores tanto de CA como de CD, teniendo la capacidad de soportar valores de
unos cientos de kilowatts durante su funcionamiento y además sus pérdidas por
conducción son relativamente bajas.
En los convertidores de CD-CA que utilizan un control completo por medio de
dispositivos semiconductores en lugar de tiristores convencionales, la entrada de
CD puede ser una fuente de voltaje o una fuente de corriente. En referencia con
este principio básico de operación, los convertidores pueden ser clasificados como
fuentes convertidoras de voltaje (VSC) o fuentes convertidoras corriente. Por
razones económicas y de desempeño, la mayoría de los controladores de potencia
reactiva están basados en VSC.
En la actualidad existen diversas topologías por medio de las cuales se puede
configurar la estructura de una VSC. Cabe mencionar, que en general, todas ellas
persiguen objetivos muy similares de funcionamiento, uno de los principales es el
de minimizar la frecuencia de operación de los dispositivos semiconductores
internos de la VSC, y producir una onda sinusoidal de voltaje con requerimientos
de filtrado nulos o mínimos a su salida. Como un ejemplo, la topología
convencional de una VSC de dos niveles utilizando IGBT se muestra en la Figura
4.2. Aunque en la Figura 4.2 no se muestra el esquema de control, éste es una
parte muy importante del sistema y esencial para su operación. En la actualidad se
utilizan principalmente dos estrategias de control aplicables para los IGBT´s: 1)
control de frecuencia fundamental, y 2) modulación de ancho de pulso (PWM).

53
Figura 4.2 Topología de un VSC trifásico de dos niveles utilizando IGBT
De una manera general se puede decir que el STATCOM es la contraparte
estática de un condensador síncrono, pues también genera y absorbe potencia
reactiva pero de una manera mucho más rápida ya que no involucra partes
móviles durante este proceso, además de que los principios por los cuales se rige
el funcionamiento del STATCOM son muy parecidos al de un condensador
síncrono.
Las pérdidas internas del STATCOM que se producen durante su funcionamiento
son normalmente compensadas por el sistema de potencia, y no por una fuente de
voltaje o corriente directa, de la misma manera que se hace con el condensador
síncrono.
Sería impropio conectar las terminales de la VSC directamente al sistema de
potencia, el cual generalmente tiene una capacidad de corto-circuito mucho más
grande que la de la VSC. Por esta razón, siempre existe un transformador de
acoplamiento entre las terminales del STATCOM y el nodo del sistema de
potencia. Cuando el STATCOM es conectado al sistema a través de un
transformador, éste puede tener suficiente reactancia para hacer posible una
operación satisfactoria del STATCOM.

54
En algunas aplicaciones prácticas donde se presentan severas perturbaciones por
armónicos, puede ser necesario contemplar dentro del esquema del convertidor un
filtro de armónicos o un banco de capacitores. En tal caso, también puede ser
necesario el empleo de reactores (separados del transformador de acoplamiento),
para limitar el flujo de corrientes armónicas desde el convertidor hacía el banco de
capacitores.
La característica natural de operación voltaje-corriente en terminales del
STATCOM se muestra en la Figura 4.3. Este comportamiento es dependiente por
completo del voltaje en terminales de la VSC y la reactancia del transformador de
acoplamiento. En general, la reactancia del transformador tiene valores típicos en
el rango de 10% y 20% de la caída de voltaje a través de él, correspondiente a un
10% o 20% del voltaje nominal del nodo del sistema de potencia en el rango de la
corriente nominal del STATCOM.
Figura 4.3 Característica V-I de un STATCOM
Por lo general, el voltaje máximo de estado estable que puede tolerar el
STATCOM en sus terminales es de 1.1 p.u. sobre su valor nominal de operación,
bajo estas circunstancias no se presentan dificultades para establecer su
capacidad y diseño. Sin embargo, el STATCOM puede soportar sobrevoltajes

55
dinámicos y sobrevoltajes transitorios por encima de los niveles provistos por las
protecciones de sobrevoltaje del dispositivo. Durante condiciones transitorias en
las cuales el voltaje aplicado excede el voltaje de CD de la VSC, los diodos del
STATCOM permitirán que la corriente fluya, y esta corriente a su vez cargará el
capacitor de DC de la fuente a un nivel de voltaje mayor [8].
4.6 MODELO DEL STATCOM CONECTADO A UN SISTEMA MÁQUINA
SÍNCRONA – BARRA INFINITA
La figura 4.4 muestra una máquina síncrona conectada a un barraje infinito por
medio de una línea de transmisión, con un sistema compensador STATCOM
conectado a un barraje intermedio; el cual se compone de un transformador con
una reactancia SDTX , conectado a una fuente inversora de voltaje (VSC ) y a un
capacitor DC [3].
Figura 4.4 STATCOM conectado a un sistema máquina síncrona – barra infinita

56
El VSC genera un voltaje )()( ?%! wtsenVtV oo detrás del transformador. La
diferencia de voltaje entre oV y el voltaje del barraje intermedio LV produce un
intercambio reactiva entre el STATCOM y el sistema de potencia, lo cual puede
ser controlado mediante el ajuste de la magnitud de oV y la fase .? De la figura
4.4 se tiene que
_
Lo Lod LoqI I j I! # (4.1)
_
(cos )o DC DCV cV jsen cV? ? ?! # ! . (4.2)
)cos( ?? senIIC
c
C
I
dt
dVLoqLod
DCDC
DCDC #!! (4.3)
Para el PWM del inversor mkc ! . Siendo k la relación entre el voltaje AC y DC
dependiendo de la estructura del inversor; m es la relación de modulación definida
por PWM y la fase ? es definida por PWM. El modelo del STATCOM presentado
en 4.1 – 4.3, es el recomendado para el estudio de estabilidad del sistema de
potencia. De la figura 4.4
_ _ _ _ __ _ _ _ _
tLL o t tL oLB tL Lo tL tL
SDT SDT
V V V jX I VI I I I I
jX jX
% % %! % ! % ! % (4.4)
_ _ _ _
t BtL tL LB LBV jX I jX I V! # # (4.5)
Remplazando (4.4) en (4.5)

57
_ _ _ _
( ) (1 )LB LB LBt o BtL LB tL tL
SDT SDT SDT
X X Xj X X X I V V V
X X X# # ! # % % (4.6)
Remplazando tV , BV y (4.2) en (4.6)
( )( ) (1 )( ( ' ' ))
( cos ) cos
LB LBtLqtL LB tL tLd q tLq q d tLd
SDT SDT
LBDC DC B B
SDT
X Xj X X X I j I X I j E X I
X X
XcV jcV sen V sen jV
X? ? $ $
# # # ! # # %
% # % % (4.7)
De (4.7), la parte real
cos
(1 )
LBB DC
SDTtLq
LB LBtL LB tL q
SDT SDT
XV sen cV
XI
X XX X X X
X X
$ ?#!
# # # #
cosLBB DC
SDTtLq
XV sen cV
XI
A
$ ?#! (4.8)
Donde
q
SDT
LB
SDT
LBtLLBtL X
X
X
X
XXXXA )1( ####!
De (4.7), la parte imaginaria

58
' (1 ) cos
(1 ) '
LB LBq B DC
SDT SDTtLd
LB LBtL LB tL d
SDT SDT
X XE V cV sen
X XI
X XX X X X
X X
$ ?# % %!
# # # #
' (1 ) cosLB LBq B DC
SDT SDTtLd
X XE V cV sen
X XI
B
$ ?# % %! (4.9)
Donde
d
SDT
LB
SDT
LBtLLBtL X
X
X
X
XXXXB ')1( ####!
De la figura 4.4 se puede ver que
_ _ __
tL ot tLLo
SDT
V jX I VI
jX
% %! (4.10)
De (4.10), separándola en parte real e imaginaria es posible obtener
' ( ' )q d tL tLd DC
Lod
SDT
E X X I cV senI
X
?% # %! (4.11)
cos ( )DC q tL tLq
Loq
SDT
cV X X II
X
? % #! (4.12)
De la figura 4.4

59
_ _ _
t L tL tLV V jX I% !
_
( ' ' ) ( )L q tLq q d tLd tL tLd tLqV X I j E X I jX I jI! # % % #
_
( ) ( ' ( ' ) )L q tL tLq q d tL tLdV X X I j E X X I! # # % # (4.13)
_2 2(( ) ) ( ' ( ' ) )L q tL tLq q d tL tLdV X X I E X X I! # # % # (4.14)
El regulador de voltaje controla el voltaje DC a través del capacitor del STATCOM.
La figura 4.5 (a) muestra el modelo del regulador, el cual adopta un PI
(proporcional – integral). La figura 4.5 (b) muestra el modelo del regulador de
voltaje AC en la salida del STATCOM [3].
Figura 4.5 (a) Modelo del regulador de voltaje DC (b) Modelo del regulador de voltaje AC

60
Y finalmente se completa el modelo del sistema con las ecuaciones de la máquina
síncrona descritas en el capítulo 2.
1' ' ( ' )
'q q d d d fd
do
E E X X I ET
7
8 9! % # % %< = (4.15)
sww %!7
$ (4.16)
@ A' ( ' ) ( )2
sm q q q d d q s
ww T E I X X I I D w w
H
7
8 9! % # # # %< = (4.17)
)( trefAfdfdA VVKEET %#%!7
(4.18)
4.7 MODELO LINEAL DEL SISTEMA
De las ecuaciones del la máquina síncrona (4.15) – (4.18), linealizando
1' ' ( ' )
'q q d d tLd fd
do
E E X X I ET
7
8 9" ! % " # % " %"< = (4.19)
sw$ +7
" ! " (4.20)
0 0 0 0
1' ( ' ( ' ) ) ( ' )
2tLq q q q d tLd tLq q d tLq tLd sI E E X X I I X X I I Dw
H+ +7
8 9" ! % " # # % " # % " # "< = (4.21)
B C1 Afd fd ref t
A A
KE E V V
T T
7
" ! % " # " %" (4.22)
Del voltaje en terminales del generador
2 2 2( ) ( ' ' )t q tLq q d tLdV X I E X I! # %

61
Linealizando
2 2
0 0 0 0 0
0 0 0
' ' ' ' ''
q d tLd d tLd d q q tLq
t q tLd tLq
t t t
E X I X I X E X IV E I I
V V V
8 9 8 9% %8 9" ! " # " # ": ; : ;: ;
: ; : ;< = < = < = (4.23)
Del voltaje en el nodo de la conexión del STATCOM (4.14)
2 2 2(( ) ) ( ' ( ' ) )L q tL tLq q d tL tLdV X X I E X X I! # # % #
Linealizando
2
0 0 0 0
0 0
2
0
0
' ( ' ) ( ' ) ( ' ) ''
( )
q d tL tLd tL d tLd tL d q
L q tLd
L L
tL q tLq
tLq
L
E X X I X X I X X EV E I
V V
X X II
V
8 9% # # % #8 9" ! " # " #: ;: ;
: ;< = < =
8 9## ": ;: ;< =
(4.24)
Linealizando (4.1)
00 0 0 0 0 0 0 0
00 0
1cos ( ) cos
cos
DC Lod Loq Lod Loq
DC DC
Lod Loq
DC
cV I I sen c I sen I
C C
cI sen I
C
? ? ? ? ?
? ?
7
8 9 8 9" ! # " # % # " #< = < =
8 9# " # "< =
(4.25)
Se asume como condición inicial la no transferencia de potencia reactiva entre el
STATCOM y el sistema de potencia; por lo tanto L oV VD ?. ! . y
0 00, 0Loq LodI I! ! . La ecuación (4.25) queda

62
0 00 0cosDC Lod Loq
DC DC
c cV I sen I
C C? ?
7 8 9 8 9" ! " # ": ; : ;
< = < = (4.26)
Linealizando las ecuaciones de corriente (4.8) – (4.9) y (4.11) – (4.12)
0 0 0 0 0 0
0 0 0
cos cos cosB LB DC LBtLq DC
SDT SDT
LB DC
SDT
V X V X cI c V
A AX AX
X c V sen
AX
$ ? ?$
??
8 9 8 98 9" ! " # " # " #: ; : ;: ;< = < = < =
8 9# % ": ;< =
(4.27)
0 0 0 0
0 0 0 0 0
1
'
cos
LB
SDT B LB DCtLd q
SDT
LB LB DCDC
SDT SDT
XX V sen X V sen
I E cB B BX
X c sen X c VV
BX BX
$ ?$
? ??
8 9# 8 9: ; 8 9" ! " # " # % " #: ;: ; : ;< = < =: ;< =
8 9 8 9# % " # % ": ; : ;< = < =
(4.28)
0 0 0 0 0 0 0cos cos q tLDC DCLoq DC tLq
SDT SDT SDT SDT
X XV c c V senI c V I
X X X X
? ? ??
#8 9 8 9 8 9 8 9" ! " # " # % " # % ": ; : ; : ; : ;
< = < = < = < = (4.29)
0 0 0 0 0 0 0cos1'
'
DC DCLod q DC
SDT SDT SDT SDT
d tLtLd
SDT
V sen c sen c VI E c V
X X X X
X XI
X
? ? ??
8 9 8 9 8 9" ! " # % " # % " # % " #: ; : ; : ;
< = < = < =
8 9## % ": ;< =
(4.30)
Remplazando las ecuaciones de corriente (4.27) – (4.30) y de voltaje (4.23) en las
ecuaciones (4.19 – 4.22) y (4.26) obtenemos el siguiente sistema de ecuaciones
lineales diferenciales

63
1 2
1'
2s s q Pc Pdc DC P sK K E K c K V K Dw
H?+ $ ? +
7
8 9" ! % " # " # " # " # " # "< = (4.31)
sw$ +7
" ! " (4.32)
4 3
1' '
'q s s q Qc Qdc DC Q fd
do
E K K E K c K V K ET
?$ ?7
8 9" ! % " # " # " # " # " %"< = (4.33)
B C5 6
1'A
fd fd ref s s q Vc Vdc DC V
A A
KE E V K K E K c K V K
T T?$ ?
78 9" ! % " # " % " # " # " # " # "< = (4.34)
7 8 'DC s s q Dc Ddc DC DV K K E K c K V K ?$ ?7
" ! " # " # " # " # " (4.35)
Donde
& ' & ' ;=
9:<
8%#;=
9:<
8%#!
B
senVIXX
A
VIXXEK B
tLqdqB
tLddqqs
$$0001 )'(
cos)'(' (4.36)
& ';;;
=
9
:::
<
8 #%#!
B
XX
IXXIK SDT
LB
tLqdqtLqs
1
)'( 002 (4.37)
& ' & ' ;=
9:<
8%%#;
=
9:<
8%#!
SDT
DCLBtLqdq
SDT
DCLBtLddqqPc
BX
senVXIXX
AX
VXIXXEK 00
000
00 )'(cos
)'('??
(4.38)
& ' & ' ;=
9:<
8%%#;
=
9:<
8%#!
SDT
LBtLqdq
SDT
LBtLddqqPdc
BX
sencXIXX
AX
cXIXXEK 00
000
00 )'(cos
)'('??
(4.39)

64
& '
& ' ;=
9:<
8%%#
#;=
9:<
8%%#!
SDT
DCLBtLqdq
SDT
DCLBtLddqqP
BX
VcXIXX
AX
senVcXIXXEK
000
0
00000
cos)'(
)'('
?
??
(4.40)
& ';;;
=
9
:::
<
8 #%#!
B
XX
XXK SDT
LB
dds
1
'13 (4.41)
& ' ;=
9:<
8%!
B
senVXXK B
dds
$'4 (4.42)
& ' ;=
9:<
8%%!
SDT
DCLBddQc
BX
senVXXXK 00'
? (4.43)
& ' ;=
9:<
8%%!
SDT
LBddQdc
BX
sencXXXK 00'
? (4.44)
& ' ;=
9:<
8%%!
SDT
DCLBddQ
BX
VcXXXK 000 cos
'?
? (4.45)
;=
9:<
8
;;=
9
::<
8#;=
9:<
8
;;=
9
::<
8 %!
A
V
V
IX
B
senV
V
EXIXK B
t
tLqqB
t
qdtLdd
s
$$ cos'''
0
0
2
0
00
2
5 (4.46)
;;;
=
9
:::
<
8 #
;;=
9
::<
8 %#;
=
9:<
8 %!
B
XX
V
EXIX
V
IXEK SDT
LB
t
qdtLdd
t
tLddq
s
1'''''
0
00
2
0
00
6 (4.47)

65
;=
9:<
8
;;=
9
::<
8#;
=
9:<
8%
;;=
9
::<
8 %!
SDT
DCLB
t
tLqq
SDT
DCLB
t
qdtLdd
VcAX
VX
V
IX
BX
senVX
V
EXIXK 00
0
0
2
00
0
00
2cos''' ??
(4.48)
2 2
0 0 00 0 0 0
0 0
' ' ' cosd tLd d q q tLqLB LBVdc
t SDT t SDT
X I X E X IX c sen X cK
V BX V AX
? ?8 9 8 9% 8 9 8 9! % #: ; : ;: ; : ;: ; : ;< = < =< = < =
(4.49)
2 2
0 0 00 0 0 0 0 0
0 0
' ' ' cosd tLd d q q tLqLB DC LB DCV
t SDT t SDT
X I X E X IX c V X c V senK
V BX V AX?
? ?8 9 8 9% 8 9 8 9! % # %: ; : ;: ; : ;: ; : ;< = < =< = < =
(4.50)
0 07 0 0
' coscos
q tLd tL B Bs
DC SDT DC SDT
X Xc X X cV sen VK sen
C X B C X A
$ $? ?
#8 9 8 9 8 9 8 9# 8 9 8 9! % # %: ; : ; : ; : ;: ; : ;< = < =< = < = < = < = (4.51)
08 0
1'1
cos
LB
d tL SDTs
DC SDT SDT
Xc X X X
KC X X B
?
E F8 9#G G8 9 8 9# : ;! # %H I: ; : ; : ;< = < =G G: ;
< =J K
(4.52)
0 0 0 0 00
0 0 0 0 00
'cos
cos cos
DC d tL LB DCDc
DC SDT SDT SDT
q tLDC LB DC
DC SDT SDT SDT
c V sen X X X V senK
C X X BX
X Xc V X Vsen
C X X AX
? ??
? ??
E F8 9 8 9 8 9 8 9#G G! % # % % #H I: ; : ; : ; : ;
G G< = < = < = < =J K
E F#8 9 8 9 8 9 8 9G G# # %H I: ; : ; : ; : ;
G G< = < = < = < =J K
(4.53)
0 0 0 0 00
0 0 0 0 00
'cos
cos cos
d tL LBDdc
DC SDT SDT SDT
q tL LB
DC SDT SDT SDT
c c sen X X X c senK
C X X BX
X Xc c X csen
C X X AX
? ??
? ??
E F8 9 8 9 8 9 8 9#G G! % # % % #H I: ; : ; : ; : ;
G G< = < = < = < =J K
E F#8 9 8 9 8 9 8 9G G# # %H I: ; : ; : ; : ;
G G< = < = < = < =J K
(4.54)

66
0 0 0 0 0 0 00
0 0 0 0 0 0 00
cos ' coscos DC d tL LB DC
D
DC SDT SDT SDT
q tLDC LB DC
DC SDT SDT SDT
c c V X X X c VK
C X X BX
X Xc c V sen X c V sensen
C X X AX
?
? ??
? ??
E F8 9 8 9 8 9 8 9#G G! % # % % #H I: ; : ; : ; : ;
G G< = < = < = < =J K
E F#8 9 8 9 8 9 8 9G G# % # % %H I: ; : ; : ; : ;
G G< = < = < = < =J K
(4.55)
El modelo completo de espacio de estado queda
3 4
2 1
6 5
8 7
10 '' ' ' ' '
0 0 0 0
02 2 2 2
10
0 0
Qdcs s
do do do do
s
s s s Pdc
A s A s A Vdcfdfd
A A A A
DCDC
s s Ddc
KK KEE T T T T
w
K K Dw K
H H H H
K K K K K KE ET T T T
V VK K K
$ $
+ +
7
7
7
7
7
8 9 88 9 % % % ": ;" :: ; : ; :: ; : ; :": ; ": ; :: ; : ;! % % % % :": ; ": ; :: ; : ; :: ;" : ; "% % % % :: ; : ; :: ;" : ;< = "<< =
' '
0 0
2 2
Qc Q
do do
PPc
A VA Vc
A A
Dc D
K K
T T
cKK
H H
K KK K
T T
K K
?
?
?
?
?
9;;;;;;;;;
: ;=
8 9% %: ;
: ;: ;: ;
"8 9: ;# % % : ;: ; "< =: ;: ;% %: ;: ;: ;< =
(4.56)

67
4.8 CONDICIONES INICIALES
Se asume como condición inicial la no transferencia de potencia reactiva entre el
STATCOM y el sistema de potencia. Lo que indica que el voltaje en la salida del
STATCOM debe ser igual en magnitud y ángulo al del barraje al cual se encuentra
conectado. Así que se pueden tomar las operaciones realizadas para hallar las
condiciones iniciales en el capítulo 2 y se completan agregando el punto de
operación del STATCOM.
4.9 CONTRIBUCIÓN DEL REGULADOR DE VOLTAJE DC AL
AMORTIGUAMIENTO DE OSCILACIONES
Se asume que la potencia activa del STATCOM conectado al sistema máquina
síncrona – barra infinita está dada por [3]:
COM DC DCP V I! (4.57)
La ecuación de balance de potencia
m e acc COMP P P P% ! # (4.58)
Donde mP (constante) es la potencia mecánica de entrada al generador, eP es la
potencia eléctrica de salida del generador y accP es la potencia acelerante para el
movimiento del rotor del generador.

68
Durante el proceso dinámico, se logra el balance de potencia para asegurar que
0e acc COMP P P" # " # " ! . COMP" y accP" varía inversamente con eP" . Por lo tanto,
COMP" es opuesto a eP" en fase y esta adelantada 90º con respecto a la velocidad
del generador w" . De la ecuación (4.52)
0 0 0 0 DCCOM DC DC DC DC DC DC DCP V I I V V I CV V7
" ! " # " ! " ! "
0 DCCOM DCP sCV V" ! " (4.59)
DCV atrasa 90º a COMP" y por lo tanto está en fase con w" , lo cual puede ser
expresado como
wDC DCV K w" ! " (4.60)
De la figura 4.5, se puede obtener la contribución del regulador de voltaje DC a las
oscilaciones electromecánicas del generador [3]. Despreciando CT del modelo
dinámico del convertidor
DCIEDC P P DCP DC
KT K K K V
s? ?? 8 9" ! " ! % # ": ;< =
w
DCIEDC P DCP DC
KT K K K w
s?8 9" ! % # ": ;< =
(4.61)

69
5. SIMULACIONES Y RESULTADOS
En este capítulo se muestran los resultados obtenidos tras realizar las
simulaciones de los modelos lineales y no lineales mostrados en los capítulos
anteriores; aplicando perturbaciones en la referencia de tensión en varios puntos
de operación del sistema.
Con el propósito obtener conclusiones acerca del amortiguamiento de oscilaciones
en el sistema, se compararán las gráficas de la respuesta de voltaje en terminales
del generador ( )tV , del ángulo de par ( )$ y de la velocidad ( )w del sistema no
lineal, puesto que en este se reflejan mejor los resultados obtenidos. Para verificar
los resultados obtenidos de la comparación gráfica, se calcularán las matrices de
estado y los eigenvalores de los respectivos modelos linealizados para concluir
sobre la estabilidad de cada sistema.
5.1 PROGRAMA UTILIZADO
El software utilizado fue MATLAB 7.0. El paquete MATLAB dispone de dos
herramientas: Simulink (plataforma de simulación multidominio) y GUIDE (editor
de interfaces de usuario – GUI):
Matlab Guide es un entorno de programación visual para poder realizar y ejecutar
programas de simulación de forma simple. Consta de dos archivos uno .m
(ejecutable) y otro .fig (parte grafica). Las dos partes están unidas a través de las
subrutinas callback. Desde la ventana de comando del Matlab se debe ejecutar el
comando guide. Esto abre la consola de edición de la parte grafica de la aplicación
a implementar (.fig). Es decir, colocar botones, cuadros de dialogo, graficas, texto,

70
etc. Una de las opciones de mayor interés es Edit Callback. Esta última abre el
archivo .m asociado (ejecutable Matlab) y nos posiciona en la sección del
programa que corresponde a la subrutina que se ejecutara cuando se realice una
determinada acción sobre el elemento que estamos editando.
Simulink es un paquete de software que se ejecuta acompañando a MATLAB para
modelar, simular y analizar sistemas dinámicos. Puede simular cualquier sistema
que pueda ser definido por ecuaciones diferenciales continuas y ecuaciones
diferenciales discretas. Esto significa que se puede modelar sistemas continuos en
el tiempo, discretos en el tiempo o sistemas híbridos.
Los datos necesarios para realizar la simulación se digitan en la interfaz (figura
5.1). Por medio de botones se calculan las condiciones iniciales del sistema y se
llaman los archivos del simulink con los respectivos diagramas de bloques de los
modelos lineales y no lineales del sistema máquina síncrona – barra infinita con
PSS y con STATCOM. En el anexo A se muestra el código del archivo .m.
Figura 5.1 Interfaz de usuario

71
5.2 ESPECIFICACIONES DE RESPUESTA TRANSITORIA
Cuando la respuesta transitoria del un sistema presenta oscilaciones
amortiguadas es habitual dar las especificaciones mostradas en la figura 5.2 [7].
Figura 5.2 Especificaciones para un sistema con respuesta sub-amortiguada
Tiempo de retardo dt
Es el tiempo que la respuesta tarda en alcanzar por primera vez la mitad del valor
final.
Tiempo de crecimiento rt
Es el tiempo requerido para que la respuesta crezca de cero hasta su valor final.
En nuestro caso lo definiremos de 0 a 100% del valor final.

72
Tiempo de pico o de sobrepaso pt
El requerido por la respuesta para alcanzar el primer pico del sobreimpulso o
sobrepaso.
Máximo sobreimpulso o sobrepaso pM
Es un indicativo de la estabilidad relativa del sistema. Se define en forma
porcentual mediante
( ) ( )100%
( )
p
p
e t eM
e
!" #
!
Tiempo de establecimiento o de solución st
Es el tiempo requerido por la respuesta para alcanzar y mantenerse dentro de
determinado rango alrededor del valor final. Este rango generalmente se
especifica en porcentaje absoluto del valor final. Para este caso se tomará el valor
final, con alguna excepción que en su momento se mencionará. El tiempo de
establecimiento se relaciona con la constante de tiempo más grande del sistema.
Nótese que si se especifican dt , rt , pt , st , y pM virtualmente queda determinada
la forma de la respuesta.
5.3 SIMULACIÓN NO LINEAL
A continuación se muestran los resultados de la simulación no lineal del sistema
con PSS y con STATCOM. Todas las perturbaciones en el voltaje de referencia se
realizaron a los 40 segundos. Los modelos no lineales respectivos se muestran en
las figuras 5.3 – 5.5. Los datos de la máquina síncrona y de la línea son tomados
de [2].

73
377,1.0,39.0',5.2,1.2,0
,2.0,400,6.9',2.3,5.0,0
""""""
""""""
sddqs
AAdoee
wDpuXpuXpuXR
sTKsTsHpuXR
La sintonización del PSS se hace para el punto de operación inicial. Se completan
los datos del sistema con los del STATCOM [3], así
05.0,8
3,1,1.0,15.0 """"" CDCSDTtL TkCXX
Para mejorar el error de estado estacionario del voltaje en terminales del
generador, del sistema no lineal con STATCOM, se modificó la ganancia del
regulador de tensión (AVR) a 2000AK " . De esta manera la magnitud de voltaje se
ajusta mejor al valor requerido de tensión. Los controladores PI de los reguladores
de voltaje DC y AC en el STATCOM se ajustaron a prueba y error hasta obtener
una respuesta satisfactoria.
Figura 5.3 Modelo no lineal del sistema máquina síncrona – barra infinita

74
Figura 5.4 Modelo no lineal del sistema máquina síncrona – barra infinita con PSS
Figura 5.5 Modelo no lineal del sistema máquina síncrona – barra infinita con STATCOM

75
Para el primer punto de operación se realizará una perturbación en la tensión de
referencia de 1 – 1.05 y de 1 – 0.95. Se considera un flujo de potencia en la línea
de
pujS 2511.04828.0 "
El voltaje en terminales del generador y el voltaje en el barraje infinito son
puVpuVt º005.1,º151 $"$" !
Se calculan las condiciones iniciales
1435.1,5435.0,0041.1
,6393.1,7923.0',3675.0,4014.0,6358.0,7718.0
0 """
""""""
%mref
fdqqdqd
TV
EEIIVV
Los parámetros del PSS calculados para este punto de operación son
3708.7,3995.0,10,059.0,4152.1,108458.2 21
4 """""#" nWPSS WTTTK &
Las condiciones iniciales del STATCOM son
0 0 00.25, 12.41º , 1DCc V'" " "
En las figuras 5.6, 5.8 y 5.9 se muestran las señales de tV ,% y w
respectivamente. En cada caso se aprecia la respuesta de cada sistema y se
comparan los efectos del PSS y del STATCOM. Las cuatro figuras poseen la
misma escala de tiempo finiquitada en el punto donde se alcanza la estabilidad del
sistema; con el fin de determinar el tiempo de establecimiento al aplicar la
perturbación. Esta particularidad de mantendrá en todas las gráficas.

76
Perturbación 1 – 1.05 p.u.
39 40 41 42 43 44 450.99
1
1.01
1.02
1.03
1.04
1.05
1.06
1.07
1.08
Tiempo [s]
Vol
taje
[p.
u.]
(a)
39 40 41 42 43 44 450.99
1
1.01
1.02
1.03
1.04
1.05
1.06
1.07
1.08
Tiempo [s]
Vol
taje
[p.
u.]
(c)
39 40 41 42 43 44 450.99
1
1.01
1.02
1.03
1.04
1.05
1.06
1.07
1.08
Tiempo [s]
Vol
taje
[p.
u.]
(b)
39 40 41 42 43 44 450.99
1
1.01
1.02
1.03
1.04
1.05
1.06
1.07
1.08
Tiempo [s]
Vol
taje
[p.
u.]
(d)
Figura 5.6 Respuesta de voltaje en terminales del generador (a) Sistema (b) Sistema con PSS
(c) Sistema con STATCOM (d) Comparación del sistema con PSS y con STATCOM
Después de la perturbación, el sistema presenta un error de estado estacionario y
pequeñas oscilaciones permanecen en la señal (ver figura 5.6 y 5.7). El PSS (con
el modelo considerado) no afecta a grandes rasgos la respuesta, manteniendo su
perfil sin reducir las oscilaciones en el transitorio, ni introducir error de estado
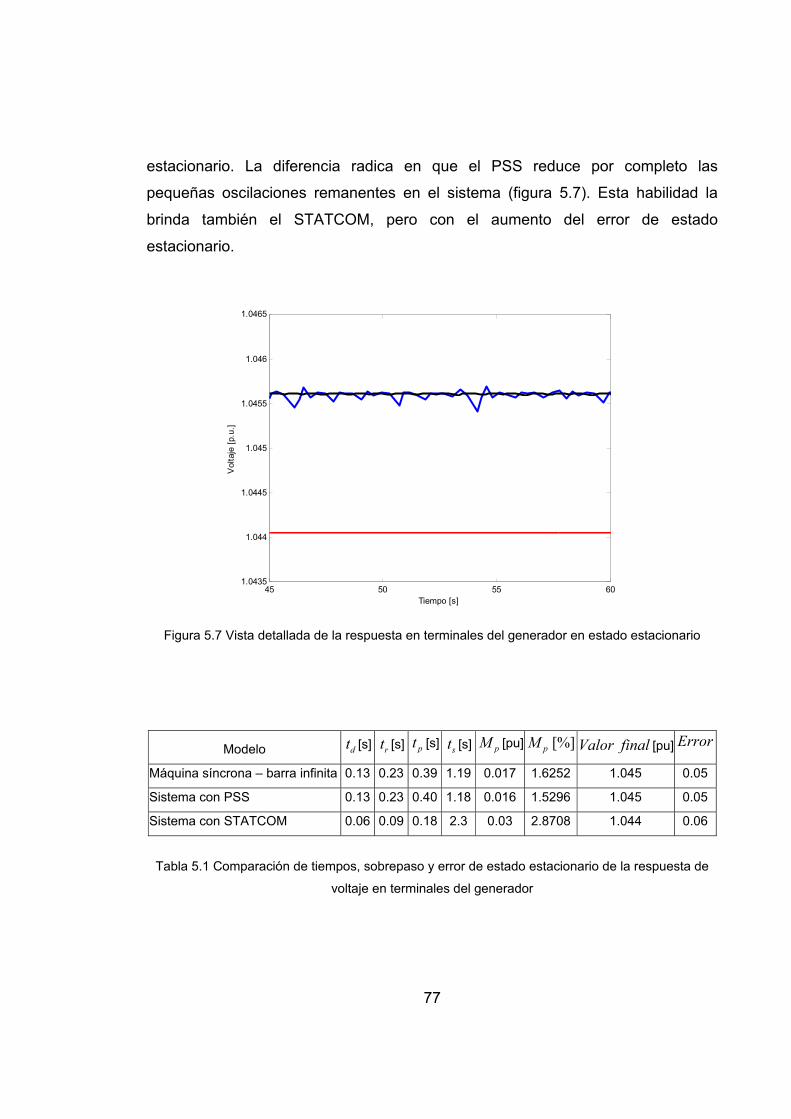
77
estacionario. La diferencia radica en que el PSS reduce por completo las
pequeñas oscilaciones remanentes en el sistema (figura 5.7). Esta habilidad la
brinda también el STATCOM, pero con el aumento del error de estado
estacionario.
45 50 55 601.0435
1.044
1.0445
1.045
1.0455
1.046
1.0465
Tiempo [s]
Vol
taje
[p.
u.]
Figura 5.7 Vista detallada de la respuesta en terminales del generador en estado estacionario
Modelo dt [s] rt [s] pt [s]st [s] pM [pu] [%]pM Valor final [pu] Error
Máquina síncrona – barra infinita 0.13 0.23 0.39 1.19 0.017 1.6252 1.045 0.05
Sistema con PSS 0.13 0.23 0.40 1.18 0.016 1.5296 1.045 0.05
Sistema con STATCOM 0.06 0.09 0.18 2.3 0.03 2.8708 1.044 0.06
Tabla 5.1 Comparación de tiempos, sobrepaso y error de estado estacionario de la respuesta de
voltaje en terminales del generador

78
La tabla 5.1 compara las especificaciones de la respuesta transitoria de tV para
cada sistema. Como se mencionó anteriormente, el PSS no reduce
considerablemente estas características. El STATCOM en cambio, presenta una
respuesta más rápida, pero aumenta el sobrepaso, el número de oscilaciones en
el transitorio y el tiempo de establecimiento.
38 39 40 41 42 43 440.9
0.95
1
1.05
1.1
1.15
Tiempo [s]
Ang
ulo
delta
[ra
d]
(a)
38 39 40 41 42 43 440.5
0.51
0.52
0.53
0.54
0.55
0.56
0.57
Tiempo [s]
Ang
ulo
delta
[ra
d]
(c)
38 39 40 41 42 43 440.9
0.95
1
1.05
1.1
1.15
Tiempo [s]
Ang
ulo
delta
[ra
d]
(b)
38 39 40 41 42 43 440.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
Tiempo [s]
Ang
ulo
delta
[ra
d]
(d)
Figura 5.8 Respuesta del ángulo delta del generador (a) Sistema (b) Sistema con PSS (c) Sistema
con STATCOM (d) Comparación del sistema con PSS y con STATCOM

79
Las características descritas del sistema con PSS para tV , se hacen extensivas
para % y w . Aquí el STATCOM demuestra un mejor aporte. La alteración tanto en
% como en w , se minimiza notoriamente en todos los aspectos, como se exhibe
en las figuras 5.8 y 5.9, siendo mas destacado la reducción del sobrepaso.
38.5 39 39.5 40 40.5 41 41.5 42 42.5 43 43.5 44
376.4
376.6
376.8
377
377.2
377.4
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(a)
38.5 39 39.5 40 40.5 41 41.5 42 42.5 43 43.5 44376.75
376.8
376.85
376.9
376.95
377
377.05
377.1
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(c)
38.5 39 39.5 40 40.5 41 41.5 42 42.5 43 43.5 44
376.4
376.6
376.8
377
377.2
377.4
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(b)
38.5 39 39.5 40 40.5 41 41.5 42 42.5 43 43.5 44
376.4
376.6
376.8
377
377.2
377.4
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(d)
Figura 5.9 Respuesta de la velocidad del generador (a) Sistema (b) Sistema con PSS (c) Sistema
con STATCOM (d) Comparación del sistema con PSS y con STATCOM

80
Perturbación 1 – 0.95 p.u.
38 39 40 41 42 43 44 45 46 470.9
0.92
0.94
0.96
0.98
1
1.02
Tiempo [s]
Vol
taje
[p.
u.]
(a)
38 39 40 41 42 43 44 45 46 470.9
0.92
0.94
0.96
0.98
1
1.02
Tiempo [s]
Vol
taje
[p.
u.]
(c)
38 39 40 41 42 43 44 45 46 470.9
0.92
0.94
0.96
0.98
1
1.02
Tiempo [s]
Vol
taje
[p.
u.]
(b)
38 39 40 41 42 43 44 45 46 470.9
0.92
0.94
0.96
0.98
1
1.02
Tiempo [s]
Vol
taje
[p.
u.]
(d)
Figura 5.10 Respuesta de voltaje en terminales del generador (a) Sistema (b) Sistema con PSS
(c) Sistema con STATCOM (d) Comparación del sistema con PSS y con STATCOM
Con la misma carga inicial en la máquina y una perturbación en la referencia de
tensión de 1 – 0.95 p.u. (figura 5.10), el sistema ostenta un tiempo de
establecimiento mayor y conserva el sobrepaso. Ante este tipo de perturbación el

81
sistema es mucho más sensible. El PSS mantiene su tendencia a eliminar las
oscilaciones remanentes en el sistema y no reduce el tiempo de establecimiento
considerablemente. El STATCOM conserva el sobrepaso y tiene un tiempo de
establecimiento menor, eliminando las oscilaciones por completo. El ángulo delta
y la velocidad del generador presentan la misma tendencia en los sistemas
considerados (figuras 5.11 y 5.12).
38 39 40 41 42 43 44 45 46 471.1
1.15
1.2
1.25
1.3
1.35
1.4
1.45
1.5
Tiempo [s]
Ang
ulo
delta
[ra
d]
(a)
38 39 40 41 42 43 44 45 46 470.55
0.555
0.56
0.565
0.57
0.575
0.58
0.585
0.59
0.595
Tiempo [s]
Ang
ulo
delta
[ra
d]
(c)
38 39 40 41 42 43 44 45 46 471.1
1.15
1.2
1.25
1.3
1.35
1.4
1.45
1.5
Tiempo [s]
Ang
ulo
delta
[ra
d]
(b)
38 39 40 41 42 43 44 45 46 470.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
Tiempo [s]
Ang
ulo
delta
[ra
d]
(d)
Figura 5.11 Respuesta del ángulo delta del generador (a) Sistema (b) Sistema con PSS (c) Sistema
con STATCOM (d) Comparación del sistema con PSS y con STATCOM

82
38 39 40 41 42 43 44 45 46 47 48
376.4
376.6
376.8
377
377.2
377.4
377.6
377.8
378
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(a)
38 39 40 41 42 43 44 45 46 47 48376.85
376.9
376.95
377
377.05
377.1
377.15
377.2
377.25
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(c)
38 39 40 41 42 43 44 45 46 47 48
376.4
376.6
376.8
377
377.2
377.4
377.6
377.8
378
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(b)
38 39 40 41 42 43 44 45 46 47 48
376.4
376.6
376.8
377
377.2
377.4
377.6
377.8
378
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(d)
Figura 5.12 Respuesta de la velocidad del generador (a) Sistema (b) Sistema con PSS (c) Sistema
con STATCOM (d) Comparación del sistema con PSS y con STATCOM

83
Para mostrar en detalle el efecto amortiguador de los dispositivos que estamos
comparando, se tomará en cuenta una mayor carga inicial y una reducción en el
voltaje de referencia. En este punto de operación se realiza una perturbación en
la referencia de tensión de 1.05 – 0.97 p.u. y se considera un flujo de potencia en
la línea de
pujS 0799.08056.0 "
El voltaje en terminales del generador y el voltaje en el barraje infinito son
puVpuVt º01,º5.2105.1 $"$" !
Se calculan las condiciones iniciales
1564.1,7696.0,0561.1
,4604.2,0130.1',3502.0,6859.0,7455.0,7393.0
0 """
""""""
%mref
fdqqdqd
TV
EEIIVV
Los parámetros del PSS calculados para este punto de operación son
5109.7,3921.0,10,077.0,4496.1,102327.3 21
4 """""#" nWPSS WTTTK &
Las condiciones iniciales del STATCOM son
1,º10.18,25.0 000 """ DCVc '

84
38 40 42 44 46 48 50 52 54 56 58 600.9
0.92
0.94
0.96
0.98
1
1.02
1.04
1.06
Tiempo [s]
Vol
taje
[p.
u.]
(a)
38 40 42 44 46 48 50 52 54 56 58 600.9
0.92
0.94
0.96
0.98
1
1.02
1.04
1.06
Tiempo [s]
Vol
taje
[p.
u.]
(c)
38 40 42 44 46 48 50 52 54 56 58 600.9
0.92
0.94
0.96
0.98
1
1.02
1.04
1.06
Tiempo [s]
Vol
taje
[p.
u.]
(b)
38 40 42 44 46 48 50 52 54 56 58 600.9
0.92
0.94
0.96
0.98
1
1.02
1.04
1.06
Tiempo [s]
Vol
taje
[p.
u.]
(d)
Figura 5.13 Respuesta de voltaje en terminales del generador (a) Sistema (b) Sistema con PSS
(c) Sistema con STATCOM (d) Comparación del sistema con PSS y con STATCOM
Con el aumento de la carga del generador, el efecto desestabilizador de la
perturbación es mucho más notable, ya que el generador se encuentra en los
límites de operación. El sistema tiende a estabilizarse a pesar de que el

85
amortiguamiento propio de la máquina es muy pequeño. No obstante, las
pequeñas oscilaciones, mostradas en las simulaciones anteriores, persisten y se
hacen de un mayor rango, como se muestra en la figura 5.14.
En este punto de operación el PSS ayuda a reducir el sobrepaso, el tiempo de
establecimiento de la señal en mayor medida y sigue conservando la tendencia de
la señal hasta eliminar las oscilaciones. El STATCOM amortigua la señal con
mayor rapidez, pero con mayor sobrepaso. La figura 5.14 muestra detalladamente
la respuesta del sistema y el efecto de cada dispositivo.
42 44 46 48 50 52 54 56 58 600.94
0.945
0.95
0.955
0.96
0.965
0.97
0.975
0.98
0.985
Tiempo [s]
Vol
taje
[p.
u.]
Figura 5.14 Vista detallada de la respuesta en terminales del generador en estado estacionario:
sistema (azul), sistema con PSS (negro), sistema con STATCOM (rojo)
El ángulo delta y la velocidad siguen siendo las variables mas beneficiadas
cuando el STATCOM se agrega al sistema. El tiempo de la oscilación se conserva
alrededor de los dos segundos en ambas señales y el cambio en la magnitud es

86
reducido en comparación del sistema con PSS, que también mejora la señal, pero
no de la forma que lo hace el STATCOM.
38 40 42 44 46 48 50 52 54 56 58 60
1.15
1.2
1.25
1.3
1.35
1.4
1.45
1.5
1.55
1.6
Tiempo [s]
Ang
ulo
delta
[ra
d]
(a)
38 40 42 44 46 48 50 52 54 56 58 600.78
0.8
0.82
0.84
0.86
0.88
0.9
Tiempo [s]
Ang
ulo
delta
[ra
d]
(c)
38 40 42 44 46 48 50 52 54 56 58 60
1.15
1.2
1.25
1.3
1.35
1.4
1.45
1.5
1.55
1.6
Tiempo [s]
Ang
ulo
delta
[ra
d](b)
38 40 42 44 46 48 50 52 54 56 58 60
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
Tiempo [s]
Ang
ulo
delta
[ra
d]
(d)
Figura 5.15 Respuesta del ángulo delta del generador (a) Sistema (b) Sistema con PSS (c) Sistema
con STATCOM (d) Comparación del sistema con PSS y con STATCOM

87
38 40 42 44 46 48 50 52 54 56 58 60375.5
376
376.5
377
377.5
378
378.5
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(a)
38 40 42 44 46 48 50 52 54 56 58 60376.8
376.9
377
377.1
377.2
377.3
377.4
377.5
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(c)
38 40 42 44 46 48 50 52 54 56 58 60375.5
376
376.5
377
377.5
378
378.5
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(b)
38 40 42 44 46 48 50 52 54 56 58 60375.5
376
376.5
377
377.5
378
378.5
Tiempo [s]
Vel
ocid
ad [
rad/
s]
(d)
Figura 5.16 Respuesta de la velocidad del generador (a) Sistema (b) Sistema con PSS (c) Sistema
con STATCOM (d) Comparación del sistema con PSS y con STATCOM

88
5.3 SIMULACIÓN LINEAL
Asumiendo los mismos puntos de operación de la simulación no lineal, se utilizará
el modelo linealizado del sistema máquina síncrona – barra infinita, para obtener la
matriz de estado y calcular los eigenvalores, a modo de indicar su grado de
estabilidad y definir el aporte que hace el PSS y el STATCOM al reubicar los
eigenvalores en el plano. En las figuras 5.13 a 5.15 se muestra los diagramas de
bloques de los modelos linealizados de cada sistema.
Figura 5.17 Modelo lineal del sistema máquina síncrona – barra infinita

89
Figura 5.18 Modelo lineal del sistema máquina síncrona – barra infinita con PSS
Figura 5.19 Modelo lineal del sistema máquina síncrona – barra infinita con STATCOM

90
Del primer punto de operación con una perturbación en la referencia de tensión de
1 – 1+/-0.05, flujo de potencia en la línea de pujS 2511.04828.0 " y las
condiciones iniciales calculadas en la simulación no lineal; las constantes iK del
modelo lineal de la máquina son
1 2 3 4 5 60.9223, 1.0737, 0.2967, 2.2655, 0.0050, 0.3572K K K K K K" " " " " "
Se calcula la matriz de estado A
0.3511 0.2360 0 0.1042
0 0 377 0
0.1678 0.1441 5.8906 0
714.41 10.005 0 5
A
( )* +* +"* + * + , -
Los eigenvalores de A son 1,2 2.9510 8.5252j. " / y 3,4 2.6699 6.4803j. " / .
Al agregar el PSS al sistema, las constantes 61 KK no cambian. Se debe
recordar que se considera solo una etapa de adelanto – atraso. Con
4152.1,108458.2 1
4 "#" TK PSS y 059.02 "T , la matriz de estado A resulta
++++++
-
)
******
,
(
"
9491.1608858.50009.00011.0
200050104.714
0001440.01678.0
0037700
01040.002360.03511.0
A
Los eigenvalores de A son 6181.81324.32,1 j/ ". , 4294.64620.24,3 j/ ". y y
0022.175 ". . Nótese que 1,2. mejora su ubicación.

91
Agregando el STATCOM al sistema y calculando las constantes
1484.0
,0770.0,1441.0,3102.0,3247.0,2262.0
,02.0,7686.0,4854.4,4057.1,2931.0
876
54321
"
" "" ""
"""""
Vdc
PdcQdcsss
sssss
K
KKKKK
KKKKK
La matriz de estado A resulta (recordando que la ganancia del regulador fue
modificada para mejorar el error de estado estacionario):
0.4672 0.0801 0 0.1042 0.0150
0 0 377 0 0
0.2196 0.0458 5.8906 0 0.0120
2262.2 200.4 0 5 1484.1
0.3102 0.3247 0 0 0.0095
A
( )* +* +* +" * + * +* + , -
Los eigenvalores de A son 1,2 2.6773 14.9029j. " / ,
3,4 2.5212 3.8523j. " / y
5 0.9703. " .
Realizando el mismo procedimiento, para el segundo punto de operación del
sistema con una potencia de pujS 0799.08056.0 " , se calculan los eigenvalores
y se muestran en la tabla 5.2.
1,2. 3,4. 5.
Máquina síncrona –barra
infinita
9635.74803.1 j/ 0949.81406.4 j/
Sistema con PSS 7986.75034.1 j/ 2953.80724.4 j/ 0772.13
Sistema con STATCOM 6417.156739.2 j/ 5576.47169.2 j/ 5896.0
Tabla 5.2 Eigenvalores de los sistemas linealizados con S=0.8 – j0.07

92
Tomando un tercer punto de operación, con una potencia del sistema de
pujS 0156.09008.0 " , los eigenvalores se muestran en la tabla 5.3.
1,2. 3,4. 5.
Máquina síncrona –barra
infinita
0108.89123.0 j/ 1272.87086.4 j/
Sistema con PSS 9087.79257.0 j/ 2640.86587.4 j/ 5657.14
Sistema con STATCOM 6174.55293.4 j/ 3584.58676.0 j/ 5786.0
Tabla 5.3 Eigenvalores de los sistemas linealizados con S=0.9 – j0.01
Según la tendencia de los eigenvalores calculados en los diferentes puntos de
operación; el sistema se hace mas sensible a medida que la carga aumenta. En
las tablas 5.2 y 5.3 se ve que el eigenvalor 1,2. se va corriendo hacia el semiplano
derecho y 3,4. se corre hacia el izquierdo. El PSS amplía el límite de operación,
reubicando los eigenvalores 1,2. ,
3,4. y agregando 5. . Cuando la potencia del
sistema está alrededor de 0.8 p.u., los eigenvalores de la matriz de estado del
sistema con STATCOM no se alteran significativamente, como sucede con el
sistema sin compensación y con PSS. Por tanto, el STATCOM ofrece un mejor
respaldo cuando el sistema está en sus límites, incluso en sobrecargas.
En los modelos del PSS y del STATCOM se asume algún grado de
amortiguamiento de la máquina síncrona, o sea 0D 0 . Si D se asume cero, el
cual es el peor caso, el aporte del PSS se verá reflejado solo en la adición de un
polo real negativo al sistema; pero el caso del STATCOM se agrava, pues aunque
agrega un polo real negativo al sistema, uno de sus polos es desplazado al
semiplano derecho, causando inestabilidad. La tabla 5.2 muestra esta situación.

93
1,2. 3,4. 5.
Máquina síncrona –barra
infinita
2.5884 8.5020j / 0.0871 7.1140j /
Sistema con PSS 2.5884 8.5020j / 0.0871 7.1140j / 19.2308
Sistema con STATCOM 3.1913 6.5236j / 0.8710 4.5292j/ 0.8360
Tabla 5.4 Sistemas con 0D 1
Cuando el amortiguamiento propio de la máquina es pobre ( 0)D 1 , es
recomendable el PSS, pero con restricciones en la ganancia del regulador (ver
ecuación 2.70). Pues con una ganancia AK suficientemente grande y la constante
5K <0, el sistema se puede volver inestable. El sistema con STATCOM no es
estable con 0D 1 , pero con un amortiguamiento propio de la máquina diferente de
cero, es estable en un amplio rango de la ganancia del regulador.

94
6. CONCLUSIONES
En este proyecto se logró implementar el modelo no lineal y lineal del sistema
máquina síncrona – barra infinita, basado en el propuesto por Heffron-Phillips,
para el estudio de estabilidad de pequeña señal y establecer criterios de
estabilidad mediante el análisis del modelo lineal.
A partir del análisis del modelo linealizado, se estableció que el sistema requiere
de un elemento auxiliar que introduzca amortiguamiento adicional. Esto se
confirmó gráficamente, en la simulación no lineal, observando el comportamiento
de las señales de voltaje en terminales, ángulo delta y velocidad del generador,
después de aplicar una perturbación en el voltaje de referencia bajo diferentes
condiciones de operación. Aunque el sistema se estabiliza, las oscilaciones no se
extinguen completamente y permanecen dentro de un determinado rango.
Se presentaron principios básicos para el estudio y diseño del estabilizador del
sistema de potencia (PSS). Siguiendo la misma metodología de estudio, se
verificó en las simulaciones su capacidad para el amortiguamiento de las
oscilaciones electromecánicas tras una perturbación en la referencia de tensión,
sin introducir error de estado estacionario y eliminando las oscilaciones
remanentes en las señales. Así el PSS mejora la estabilidad de pequeña señal del
sistema. Por otro lado, las especificaciones de la respuesta transitoria no se
reducen drásticamente en las variables analizadas (voltaje en terminales, ángulo
delta, velocidad). Bajo condiciones de carga severa, el sistema con PSS reduce
las oscilaciones en cierta medida y no las elimina con la misma rapidez. Además,

95
la situación empeora con el aumento de la ganancia del regulador de voltaje
(AVR).
Se han mostrado las principales características y principio de operación del
STATCOM. En la simulación se observó el efecto amortiguador sobre el sistema
después de aplicar una perturbación. A pesar de que el STATCOM aumenta el
sobrepaso y las oscilaciones en el transitorio aún en condiciones de carga media;
este tiene una respuesta rápida y elimina las oscilaciones. Cuando el sistema esta
cargado, su desempeño es mucho mejor que el del sistema con PSS ante una
perturbación en la referencia de tensión; conservando su rápida respuesta, con un
tiempo de establecimiento menor y suprimiendo las oscilaciones por completo. Lo
anterior se confirmó comparando la ubicación de los eigenvalores de la matriz de
estado con los sistemas anteriores, en condiciones de carga media y cuando el
sistema esta cerca del límite de operación.
En términos generales, el estabilizador del sistema de potencia y el STATCOM
amplían los límites de operación y mejoran la estabilidad de pequeña señal del
sistema de potencia. El STATCOM marca la diferencia cuando el sistema está
cerca del límite e incluso en sobrecarga, contando además con su principal
aplicación que es la compensación de potencia reactiva. Aunque sus diferencias
económicas son notables, cada uno de estos dispositivos tiene su campo de
aplicación determinado y en este documento se estableció la influencia que
ejercen sobre la estabilidad de pequeña señal del sistema.

96
REFERENCIAS BIBLIOGRÁFICAS
[1] ALZATE, Alfonso. Dinámica de sistemas eléctricos: Estabilidad y control.
Maestría en Ingeniería Eléctrica, Universidad Tecnológica de Pereira, 2000.
[2] Sauer, Peter W. y Pai, M. A. Power systems dynamics and stability. Upper Saddle River, New Jersey: Prentice-Hall, 1998. 357 p. ISBN 0-13-678830-0.
[3] WANG, H. F.. Phillips – Heffron model of power systems installed with
STATCOM an applications. IEE Proc. – Gener. Distrib., septiembre 1999. Vol 146,
No 5: 521-527.
[4] CAÑIZARES, POSSI, CORSI y UZUNOVIC. STATCOM modelling for voltage
and angle stability studies. Electrical power and energy systems, 2003, 25: 1-20.
[5] ALZATE, HERRERA y CASTRO. Efecto de un compensador de VAR estático
en el amortiguamiento de oscilaciones. Scientia et technica, Universidad
Tecnológica de Pereira, julio 2003, No 21.
[6] WANG, H. F y SWIFT, F. J. A unified for the analysis of FACTS devices in
damping power systems oscillations part I: Single machine infinite-bus power
systems. IEEE Transactions on Power Delivery, abril 1997, Vol. 12: 941-946.
[7] GIRALDO, Didier y TABARES, Iván. Teoría de control. Programa de Ingeniería
Eléctrica, Universidad Tecnológica de Pereira, 1997.
[8] Murillo, José. Análisis del STATCOM trifásico en estado estacionario y
dinámico para la estabilidad de voltaje [Tesis Doctoral]. Guadalajara: CINESTAV -

97
I.P.N., noviembre 2005. Disponible en: http://www.gdl.cinvestav.mx/jramirez/
doctos/maestria/Tesis_JLMP.pdf
[9] Equipo autónomo de estabilización de sistemas de potencia UNITROL®.
Disponible en: www.abb.com/unicontrol
[10] STATCOM: Converter solutions for reliable and stable grids. Disponible en:
www.abb.com/powerelectronics
[11] VINASCO, Guillermo. Uso de fuentes VSI/CSI en sistemas de potencia.
Interconexión Eléctrica S.A, Colombia. Disponible en: http:/energiaycomputacion-
univalle.edu.co/edicion23/23art10.PDF
[12] DÁVALOS, Ricardo y RAMÍREZ, Juan. Características funcionales del
STATCOM. CINVESTAV- I.P.N. – Unidad Guadalajara, 2001. Segundo Congreso
Bienal, CIGRÉ-México, 13 – 15 de junio del 2001, Irapuato, Gto. Disponible en:
http://www.cigre.org.mx/uploads/media/14-06.PDF
[13] GARCÍA, Pablo y GARCÍA, Aurelio. Transporte flexible de la energía eléctrica
en corriente alterna. Anales de mecánica y electricidad, noviembre-diciembre
2004, Universidad Pontificia Comillas de Madrid. Disponible en:
http://dialnet.unirioja.es/servlet/articulo?codigo=1068846
[14] CASTILLO, Isidro. Un criterio óptimo para coordinar estabilizadores en
sistemas eléctricos de potencia [Tesis Doctoral]. Guadalajara: CINESTAV - I.P.N.,
diciembre de 2002. Disponible en: http://www.gdl.cinvestav.mx/jramirez/doctos/
doctorado/Tesis_Isidro.pdf
98
[15] SARMIENTO, Héctor. Algunas consideraciones para identificar la aplicación
de controladores FACTS en los sistemas de transmisión. Instituto de
Investigaciones Eléctricas, CIGRE-México, BIENAL 2001. Disponible en:
http://www.cigre.org.mx/uploads/media/14-08.PDF
[16] VANFRETTI, Luigi. Sistemas de control de excitación y estabilizadores de
sistemas de potencia. Department of electrical, computer and systems
engineering, Ressenlaer Polytechnic Institute, NY, Abril 2007. Disponible en:
http://www.rpi.edu/~vanfrl/pdfs/AVRPSS_LV_2007.pdf
[17] CORONADO, Ixtláhuatl. Ubicación de dispositivos FACTS desde una
perspectiva dinámica [Tesis doctoral]. Guadalajara: CINESTAV - I.P.N.,
septiembre de 2001. Disponible en: http://www.gdl.cinvestav.mx/jramirez/doctos/
maestria/tesis_ubicacion.pdf
[18] PIEDRAHITA, Alejandro y SALGADO, Pedro. Sistemas de transmisión AC
flexible (FACTS). Electroporcelana GAMMA S.A., Boletín No. 46, Oct – Dic. 2002.
Disponible en: http://www.gamma.com.co/pdf/boletines/tecnicos/boletin46.pdf
[19] CORONADO, Ixtláhuatl, ZÚÑIGA, Pável y RAMÍREZ, Juan. FACTS:
soluciones modernas para la industria eléctrica. Avance y Perspectiva, vol. 20,
Julio-agosto de 2001. Disponible en: http://www.cinvestav.mx/Portals/0/
Publicaciones%20y%20Noticias/Revistas/Avance%20y%20perspectiva/jugalo01/3
%20facts.pdf
[20] DE MELLO, F. P. y CONCORDIA C.. Concepts of synchronous machina
stability as affected by excitation control. IEEE Transactions on Power apparatus
and systems, abril 1969, Vol. PAS – 88.

99
ANEXO A
function varargout = composcil(varargin) gui_Singleton = 0; gui_State = struct('gui_Name', mfilename, ... 'gui_Singleton', gui_Singleton, ... 'gui_OpeningFcn', @composcil_OpeningFcn, ... 'gui_OutputFcn', @composcil_OutputFcn, ... 'gui_LayoutFcn', [] , ... 'gui_Callback', []); if nargin & isstr(varargin{1}) gui_State.gui_Callback = str2func(varargin{1}); end if nargout [varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:}); else gui_mainfcn(gui_State, varargin{:}); end function composcil_OpeningFcn(hObject, eventdata, handles, varargin) handles.output = hObject; guidata(hObject, handles); function varargout = composcil_OutputFcn(hObject, eventdata, handles) varargout{1} = handles.output; function Rs_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Rs_Callback(hObject, eventdata, handles) function Xd_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Xd_Callback(hObject, eventdata, handles) function Xpd_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Xpd_Callback(hObject, eventdata, handles) function Xq_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end

100
function Xq_Callback(hObject, eventdata, handles) function Tpdo_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end
function Tpdo_Callback(hObject, eventdata, handles) function H_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function H_Callback(hObject, eventdata, handles) function D_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function D_Callback(hObject, eventdata, handles) function Ws_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Ws_Callback(hObject, eventdata, handles) function Re_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Re_Callback(hObject, eventdata, handles) function Xe_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Xe_Callback(hObject, eventdata, handles) function Vt_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Vt_Callback(hObject, eventdata, handles) function tetainf_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white');

101
else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function tetainf_Callback(hObject, eventdata, handles) function tetat_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function tetat_Callback(hObject, eventdata, handles) function Vinf_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Vinf_Callback(hObject, eventdata, handles) function Vd_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Vd_Callback(hObject, eventdata, handles) function Ka_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Ka_Callback(hObject, eventdata, handles) function Ta_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Ta_Callback(hObject, eventdata, handles) function deltao_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function deltao_Callback(hObject, eventdata, handles) function Vq_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Vq_Callback(hObject, eventdata, handles) function Id_CreateFcn(hObject, eventdata, handles)
102
if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Id_Callback(hObject, eventdata, handles) function Iq_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Iq_Callback(hObject, eventdata, handles) function Epq_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Epq_Callback(hObject, eventdata, handles) function Efd_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Efd_Callback(hObject, eventdata, handles) function Vref_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Vref_Callback(hObject, eventdata, handles) function TM_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function TM_Callback(hObject, eventdata, handles) function pushbutton1_Callback(hObject, eventdata, handles) Rs = str2double(get(handles.Rs,'String')); Xd = str2double(get(handles.Xd,'String')); Xpd = str2double(get(handles.Xpd,'String')); Xq = str2double(get(handles.Xq,'String')); Tpdo = str2double(get(handles.Tpdo,'String')); H = str2double(get(handles.H,'String')); D = str2double(get(handles.D,'String')); Ws = str2double(get(handles.Ws,'String')); Re = str2double(get(handles.Re,'String')); Xe = str2double(get(handles.Xe,'String')); Ka = str2double(get(handles.Ka,'String')); Ta = str2double(get(handles.Ta,'String'));

103
XtL = str2double(get(handles.XtL,'String')); Xsdt = str2double(get(handles.Xsdt,'String')); Cdc = str2double(get(handles.Cdc,'String')); k = str2double(get(handles.k,'String')); Vdcref = str2double(get(handles.Vdcref,'String')); VLref = str2double(get(handles.VLref,'String')); Vt =str2double(get(handles.Vt,'String')); tetat =str2double(get(handles.tetat,'String')); Vinf=str2double(get(handles.Vinf,'String')); tetainf =str2double(get(handles.tetainf,'String'));
Vte = Vt*cos(tetat*pi/180)+i*Vt*sin(tetat*pi/180); Vbinf = Vinf*cos(tetainf*pi/180)+i*Vinf*sin(tetainf*pi/180); Ig=(Vte-Vbinf)/(Re+i*Xe); E=Vte+(Rs+i*Xq)*Ig; do=angle(E)*180/pi; d=angle(E); tet=tetat*pi/180; I=Ig*(cos(-(angle(E)-pi/2))+i*sin(-(angle(E)-pi/2))); Id=real(I); Iq=imag(I); V=Vte*(cos(-(angle(E)-pi/2))+i*sin(-(angle(E)-pi/2))); Vd=real(V); Vq=imag(V); Epq=Vq+Xpd*Id; Efd=Epq+(Xd-Xpd)*Id; Vref=Vt+Efd/Ka; TM=Epq*Iq+(Xq-Xpd)*Id*Iq; det=Re*Re+(Xe+Xq)*(Xe+Xpd); K1=-(1/det)*(Iq*Vinf*(Xpd-Xq)*((Xq+Xe)*sin(angle(E))-Re*cos(angle(E)))+Vinf*((Xpd-Xq)*Id-Epq)*((Xpd+Xe)*cos(angle(E))+Re*sin(angle(E)))); K2=(1/det)*(Iq*det-Iq*(Xpd-Xq)*(Xq+Xe)-Re*(Xpd-Xq)*Id+Re*Epq); K3=1/(1+((Xd-Xpd)*(Xq+Xe))/det); K4=((Vinf*(Xd-Xpd))/det)*((Xq+Xe)*sin(angle(E))-Re*cos(angle(E))); K5=(1/det)*((Vd*Xq/Vt)*(Re*Vinf*sin(angle(E))+Vinf*(Xpd+Xe)*cos(angle(E)))+(Vq/Vt)*(Xpd*(Re*Vinf*cos(angle(E))-Vinf*(Xq+Xe)*sin(angle(E))))); K6=(1/det)*((Vd*Xq*Re/Vt)-(Vq*Xpd*(Xq+Xe)/Vt))+Vq/Vt; % calculos STATCOM Vl=(Xe*Vte+XtL*Vbinf)/(Xe+XtL); VL=abs(Vl); alpha=angle(Vl); mo=sqrt(8/3)*(VLref/Vdcref); Vdco=1; co=0.25; A=XtL+Xe+XtL*(Xe/Xsdt)+(1+(Xe/Xsdt))*Xq; B=XtL+Xe+XtL*(Xe/Xsdt)+(1+(Xe/Xsdt))*Xpd; I1=(Vinf*cos(d))/A; I2=(Xe*Vdco*cos(alpha))/(A*Xsdt); I3=(Xe*co*cos(alpha))/(A*Xsdt); I4=(-Xe*co*Vdco*sin(alpha))/(A*Xsdt); I5=(1+(Xe/Xsdt))/B; I6=(Vinf*sin(d))/B; I7=(-Xe*Vdco*sin(alpha))/(B*Xsdt); I8=(-Xe*co*sin(alpha))/(B*Xsdt);

104
I9=(-Xe*co*Vdco*cos(alpha))/(B*Xsdt); W1=Epq+(Xq-Xpd)*Id; W2=(Xq-Xpd)*Iq; K1s=W1*I1+W2*I6; K2s=Iq+W2*I5; Kpc=W1*I2+W2*I7; Kpdc=W1*I3+W2*I8; Kppsi=W1*I4+W2*I9; W3=Xd-Xpd; K3s=1+W3*I5; K4s=W3*I6;Kqc=W3*I7;Kqdc=W3*I8; Kqpsi=W3*I9; W4=(Epq-Xpd*Id)/Vt; W5=(Xpd*Xpd*Id-Xpd*Epq)/Vt; W6=(Xq*Xq*Iq)/Vt; K5s=W5*I6+W6*I1; K6s=W4+W5*I5; Kvc=W5*I7+W6*I2; Kvdc=W5*I8+W6*I3; Kvpsi=W5*I9+W6*I4; W7=(Epq-(XtL+Xpd)*Id)/VL; W8=(((XtL+Xpd)^2)*Id-(XtL+Xpd)*Epq)/VL; W9=(((Xq+XtL)^2)*Iq)/VL; m1=W7+W8*I5; m2=W8*I6+W9*I1; m3=W8*I7+W9*I2; m4=W8*I8+W9*I3; m5=W8*I9+W9*I4; n1=(co*cos(alpha))/Cdc; n2=(co*sin(alpha))/Cdc; L1=(Vdco*cos(alpha))/Xsdt; L2=(co*cos(alpha))/Xsdt; L3=(-co*Vdco*sin(alpha))/Xsdt; L4=-((Xq+XtL)/Xsdt); L5=1/Xsdt; L6=-((Xpd+XtL)/Xsdt); L7=-((Vdco*sin(alpha))/Xsdt); L8=-((co*sin(alpha))/Xsdt); L9=-((co*Vdco*cos(alpha))/Xsdt); K7s=n1*L6*I6+n2*L4*I1; K8s=n1*(L5+L6*I5); Kdc=n1*(L7+L6*I7)+n2*(L1+L4*I2); Kddc=n1*(L8+L6*I8)+n2*(L2+L4*I3); Kdpsi=n1*(L9+L6*I9)+n2*(L3+L4*I4); set(handles.deltao,'String',do); set(handles.Id,'String',Id); set(handles.Iq,'String',Iq); set(handles.Vd,'String',Vd); set(handles.Vq,'String',Vq); set(handles.Epq,'String',Epq); set(handles.Efd,'String',Efd); set(handles.Vref,'String',Vref);

105
set(handles.TM,'String',TM); set(handles.K1,'String',K1); set(handles.K2,'String',K2); set(handles.K3,'String',K3); set(handles.K4,'String',K4); set(handles.K5,'String',K5); set(handles.K6,'String',K6); %Calculos PSS Wn=sqrt((K1*Ws)/(2*H)); GEP=(K2*Ka*K3)/(Ka*K3*K6+(1+i*Wn*Tpdo*K3)*(1+i*Wn*Ta)); T2=0.02:0.001:0.15; T1=(tan(atan(Wn*T2)-angle(GEP)))/Wn; T=[]; for j=1:length(T1) if T1(j)>T2(j) if T1(j)<1.5 T=[T;T1(j) T2(j)]; end end end N=length(T); y=round(1+(N-1)*rand); const=T(N,:); Tuno=sel(const,1,1); Tdos=sel(const,1,2); r=D/(2*(sqrt(K1*(2*H/Ws)))); Tw=10; G1=[(1+i*Wn*Tuno)*i*Wn*Tw]/[(1+i*Wn*Tdos)*(1+i*Wn*Tw)]; Kpss=(2*r*(2*H/Ws))/[abs(GEP)*abs(G1)]; set(handles.Wn,'String',Wn); set(handles.const1,'String',Tuno); set(handles.const2,'String',Tdos); set(handles.Tw,'String',Tw); set(handles.ratio,'String',r); set(handles.Kpss,'String',Kpss); %Matriz de estado Al=[[-1/(K3*Tpdo) -K4/Tpdo 0 1/Tpdo];[0 0 Ws 0];[-K2/(2*H) -K1/(2*H) (-D*Ws)/(2*H) 0];[-Ka*K6/Ta -Ka*K5/Ta 0 -1/Ta]]; Alpss=[[-1/(K3*Tpdo) -K4/Tpdo 0 1/Tpdo 0];[0 0 Ws 0 0];[-K2/(2*H) -K1/(2*H) (-D*Ws)/(2*H) 0 0];[-Ka*K6/Ta -Ka*K5/Ta 0 -1/Ta Ka/Ta];[(-K2*Tuno*Kpss)/(Tdos*2*H) (-K1*Tuno*Kpss)/(Tdos*2*H) (Kpss/Tdos)-(D*Ws/(2*H)) 0 -1/Tdos]]; Als=[[-K3s/Tpdo -K4s/Tpdo 0 1/Tpdo -Kqdc/Tpdo];[0 0 Ws 0 0];[-K2s/(2*H) -K1s/(2*H) -(D*Ws)/(2*H) 0 -Kpdc/(2*H)];[-Ka*K6s/Ta -Ka*K5s/Ta 0 -1/Ta -Ka*Kvdc/Ta];[K8s K7s 0 0 Kddc]]; save condiciones; function K1_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function K1_Callback(hObject, eventdata, handles) function K2_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white');

106
else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function K2_Callback(hObject, eventdata, handles) function K3_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function K3_Callback(hObject, eventdata, handles)
function K4_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function K4_Callback(hObject, eventdata, handles) function K5_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function K5_Callback(hObject, eventdata, handles) function K6_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function K6_Callback(hObject, eventdata, handles) function pushbutton7_Callback(hObject, eventdata, handles) open('modelonolineal1.mdl') function pushbutton8_Callback(hObject, eventdata, handles) open('modelolineal1.mdl') function pushbutton9_Callback(hObject, eventdata, handles) open('modelolinealconpss.mdl') function Wn_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Wn_Callback(hObject, eventdata, handles) function const1_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function const1_Callback(hObject, eventdata, handles) function const2_CreateFcn(hObject, eventdata, handles)

107
if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function const2_Callback(hObject, eventdata, handles) function Tw_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end
function Tw_Callback(hObject, eventdata, handles) function ratio_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function ratio_Callback(hObject, eventdata, handles) function Kpss_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Kpss_Callback(hObject, eventdata, handles) function pushbutton10_Callback(hObject, eventdata, handles) open('modnolinconpss.mdl') function XSDT_Callback(hObject, eventdata, handles) function CDC_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function CDC_Callback(hObject, eventdata, handles) function k_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function k_Callback(hObject, eventdata, handles) function pushbutton11_Callback(hObject, eventdata, handles) open('modnolinconstatcom1.mdl') function Xsdt_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Xsdt_Callback(hObject, eventdata, handles)

108
function Cdc_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Cdc_Callback(hObject, eventdata, handles) function XtL_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end
function XtL_Callback(hObject, eventdata, handles) function Vdcref_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function Vdcref_Callback(hObject, eventdata, handles) function VLref_CreateFcn(hObject, eventdata, handles) if ispc set(hObject,'BackgroundColor','white'); else set(hObject,'BackgroundColor',get(0,'defaultUicontrolBackgroundColor')); end function VLref_Callback(hObject, eventdata, handles) function pushbutton12_Callback(hObject, eventdata, handles) open('modlinconstatcom1.mdl')