AÇÕES DE CONTROLE - fem.unicamp.brem621/aulas/aula17/acoesdecont.pdf · Controlador PID. Controle...
47
Controle de Sistemas Mecânicos - DMC - UNICAMP AÇÕES DE CONTROLE AÇÕES DE CONTROLE ■ Ações de Controle ■ Relação Controlador/Planta ■ Controlador proporcional ■ Efeito integral ■ Efeito derivativo ■ Controlador PID
Transcript of AÇÕES DE CONTROLE - fem.unicamp.brem621/aulas/aula17/acoesdecont.pdf · Controlador PID. Controle...
Controle de Sistemas Mecânicos - DMC - UNICAMP
AÇÕES DE CONTROLEAÇÕES DE CONTROLE
■ Ações de Controle■ Relação Controlador/Planta■ Controlador proporcional■ Efeito integral■ Efeito derivativo■ Controlador PID

Controle de Sistemas Mecânicos - DMC - UNICAMP
Ações comuns de controleAções comuns de controle
Ações mais comuns:• tipo liga-desliga (duas posições)• proporcional• proporcional-integral• proporcional-derivativo• proporcional-integral-derivativo
K(s) P(s)
R(s) E(s) U(s) Y(s)
-
■ Ação de controle: o tipo de processamento que o controladorrealiza sobre o sinal de erro para gerar o sinal aplicado à planta
Controle de Sistemas Mecânicos - DMC - UNICAMP
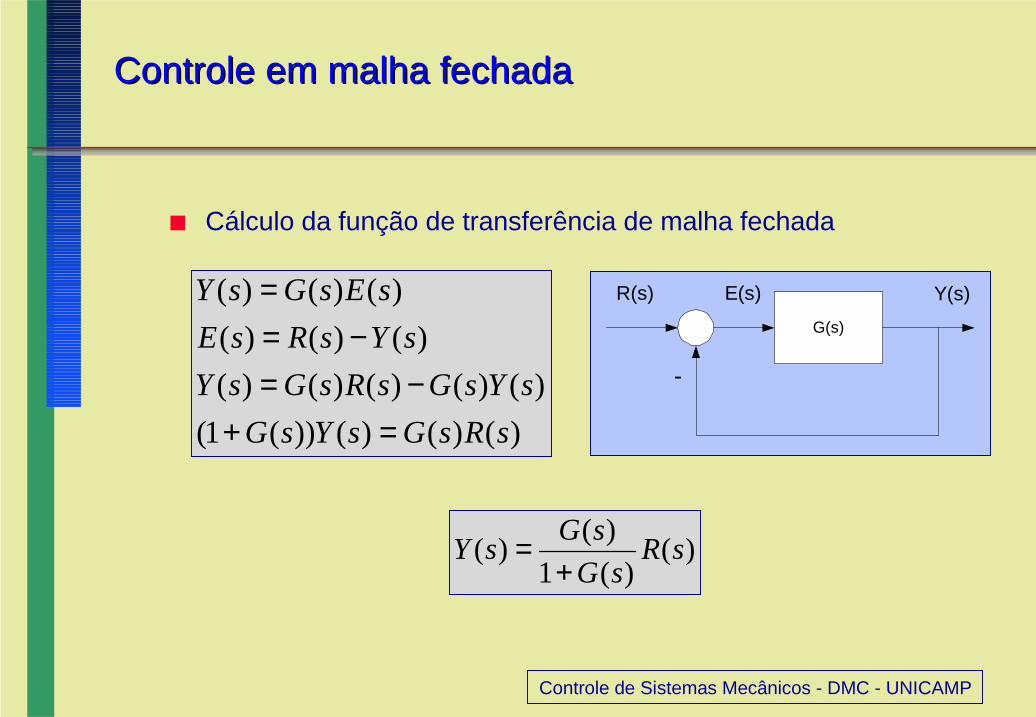
Controle em malha fechadaControle em malha fechada
■ Cálculo da função de transferência de malha fechada
G(s)
R(s) E(s) Y(s)
-
)()()())(1(
)()()()()(
)()()(
)()()(
sRsGsYsG
sYsGsRsGsY
sYsRsE
sEsGsY
=+−=
−==
)()(1
)()( sR
sG
sGsY
+=
Controle de Sistemas Mecânicos - DMC - UNICAMP
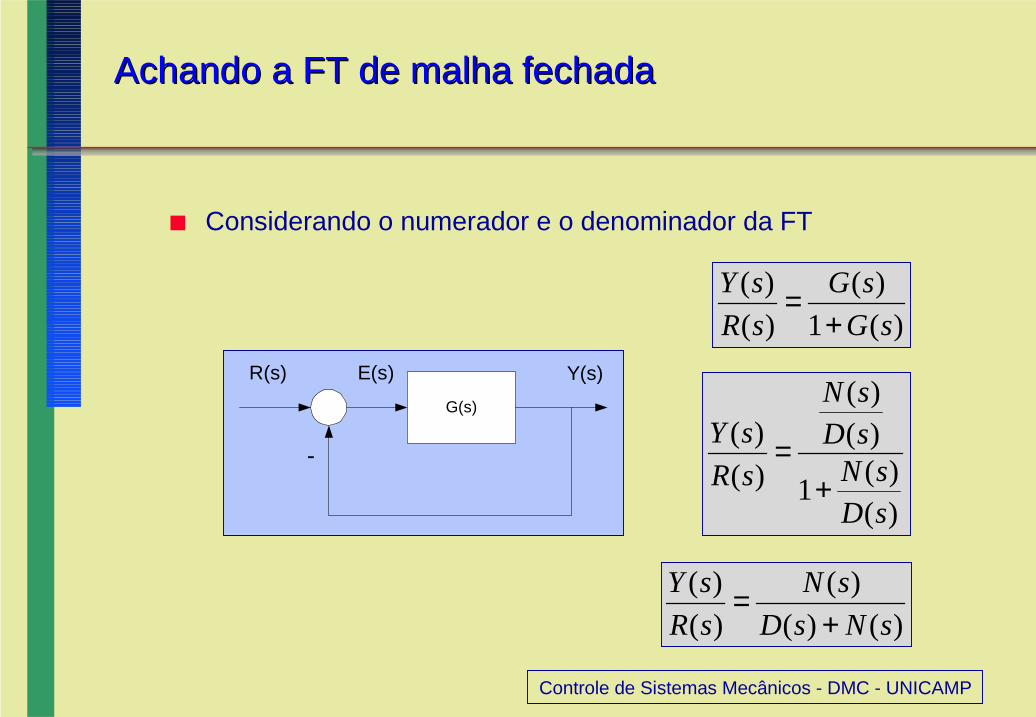
Achando a FT de malha fechadaAchando a FT de malha fechada
■ Considerando o numerador e o denominador da FT
G(s)
R(s) E(s) Y(s)
-
)(1
)(
)(
)(
sG
sG
sR
sY
+=
)()(
)(
)(
)(
sNsD
sN
sR
sY
+=
)()(
1
)()(
)(
)(
sD
sNsD
sN
sR
sY
+=
Controle de Sistemas Mecânicos - DMC - UNICAMP
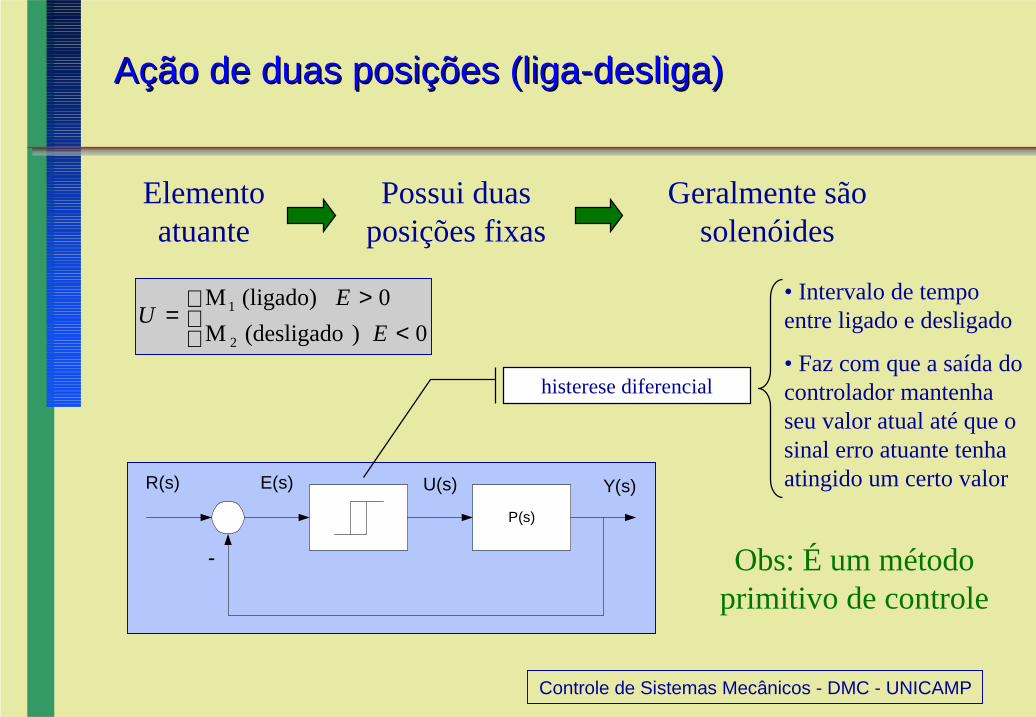
Possui duasposições fixas
Elementoatuante
Geralmente sãosolenóides
• Intervalo de tempoentre ligado e desligado
<>
=0 )(desligado M
0 (ligado) M
2
1
E
EU
• Faz com que a saída docontrolador mantenhaseu valor atual até que osinal erro atuante tenhaatingido um certo valor
Ação de duas posições (liga-desliga)Ação de duas posições (liga-desliga)
P(s)
R(s) E(s) U(s) Y(s)
-
histerese diferencial
Obs: É um métodoprimitivo de controle
Controle de Sistemas Mecânicos - DMC - UNICAMP
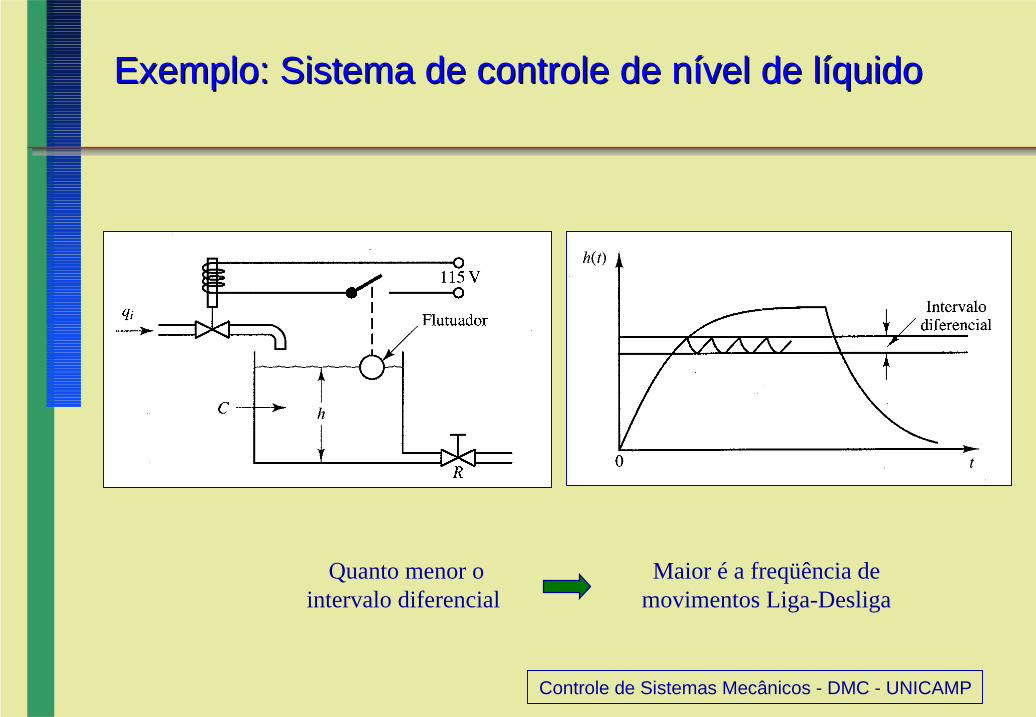
Exemplo: Sistema de controle de nível de líquidoExemplo: Sistema de controle de nível de líquido
Quanto menor ointervalo diferencial
Maior é a freqüência demovimentos Liga-Desliga
Controle de Sistemas Mecânicos - DMC - UNICAMP
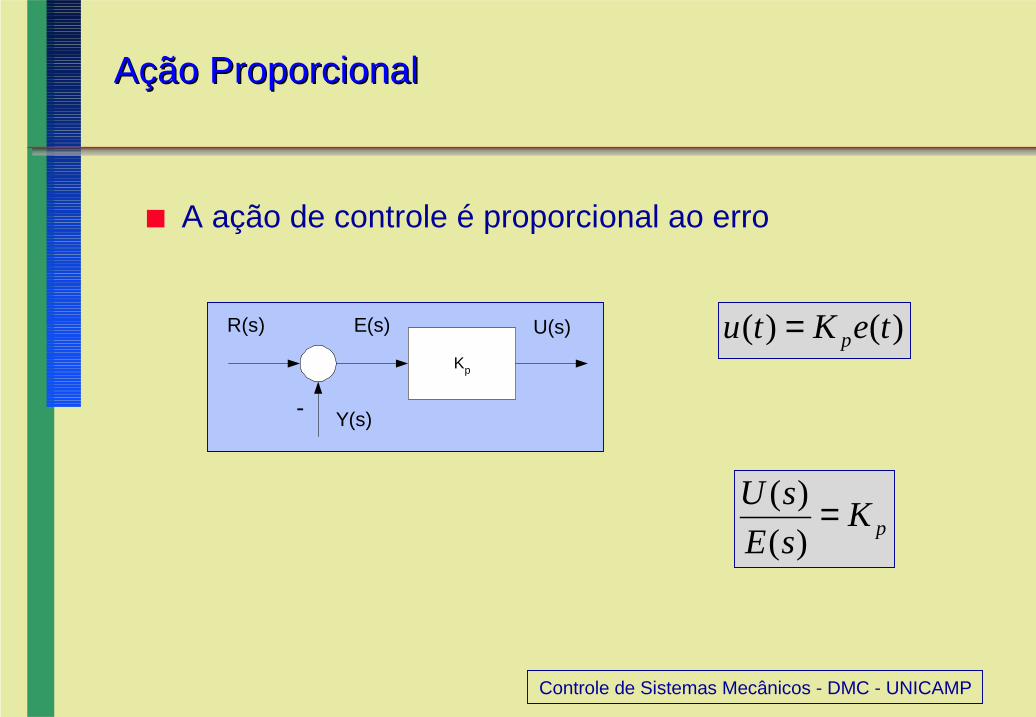
■ A ação de controle é proporcional ao erro
Ação ProporcionalAção Proporcional
Kp
R(s) E(s) U(s)
Y(s)-
)()( teKtu p=
pKsE
sU =)(
)(

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ A ação de controle é proporcional à integral do erro■ É sempre usada em conjunto com a ação proporcional
( ) ( )∫=t
I dtteKtu0
( )( ) s
K
sE
sU I=
Ação IntegralAção Integral
R(s) E(s) U(s)
Y(s)-s
KI

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ A ação de controle é proporcional ao erro e à sua integral
( )( ) s
KsK
sE
sU IP +=
Ação Proporcional IntegralAção Proporcional Integral
R(s) E(s) U(s)
Y(s)-s
KK I
P +
Controle de Sistemas Mecânicos - DMC - UNICAMP
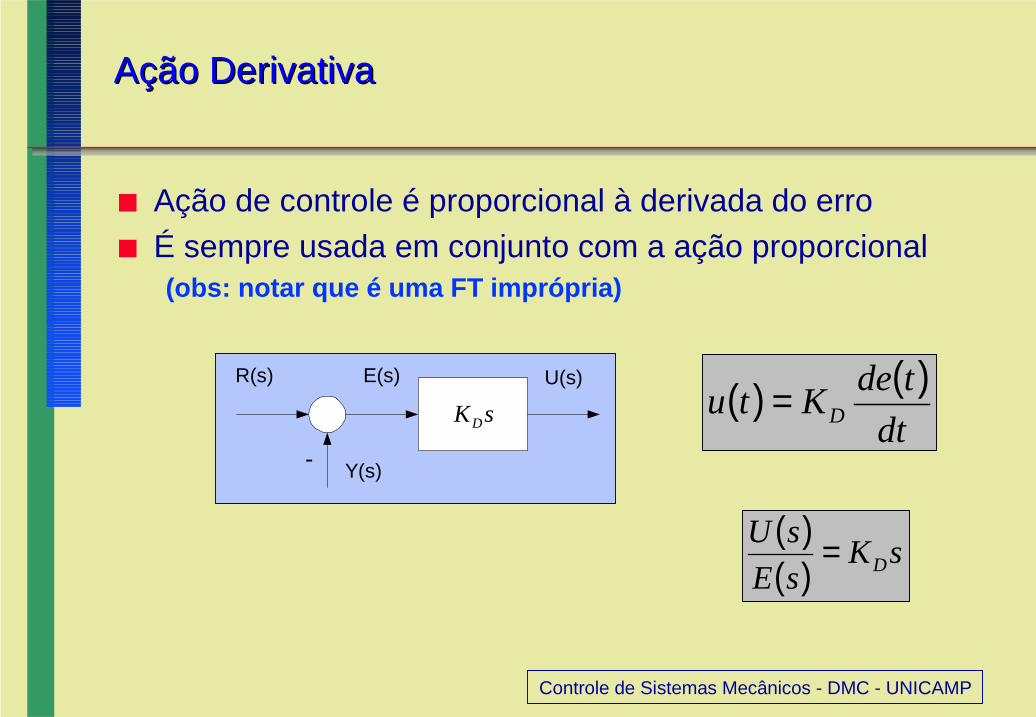
■ Ação de controle é proporcional à derivada do erro■ É sempre usada em conjunto com a ação proporcional
(obs: notar que é uma FT imprópria)
( ) ( )dt
tdeKtu D=
( )( )
sKsE
sUD=
Ação DerivativaAção Derivativa
R(s) E(s) U(s)
Y(s)-
sKD
Controle de Sistemas Mecânicos - DMC - UNICAMP
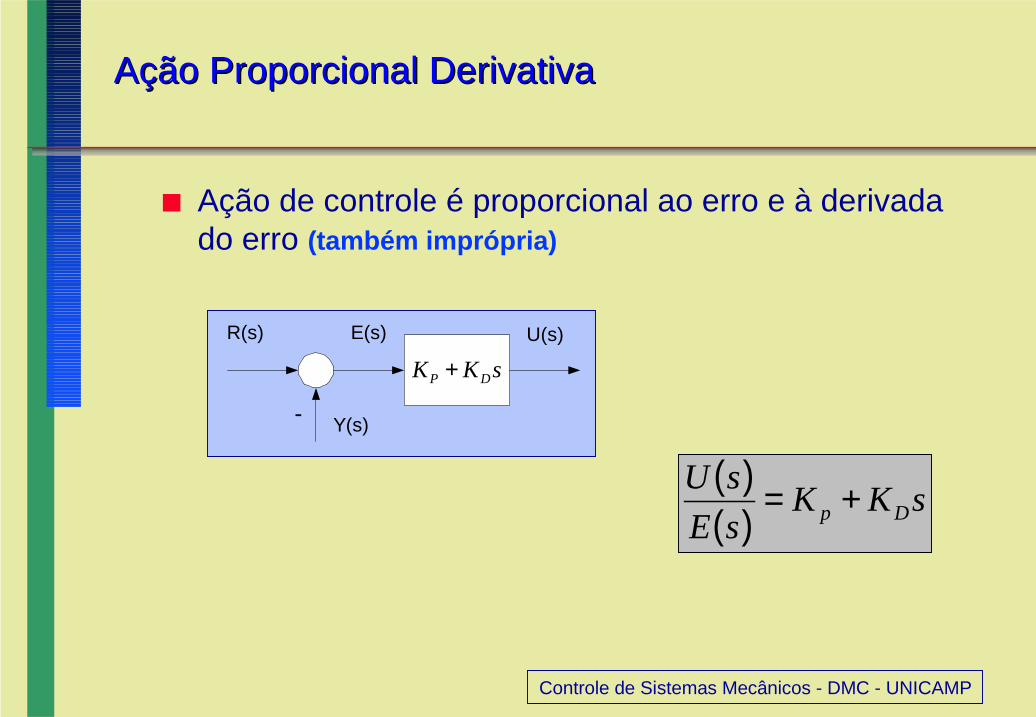
■ Ação de controle é proporcional ao erro e à derivadado erro (também imprópria)
( )( )
sKKsE
sUDp +=
Ação Proporcional DerivativaAção Proporcional Derivativa
R(s) E(s) U(s)
Y(s)-
sKK DP +
Controle de Sistemas Mecânicos - DMC - UNICAMP
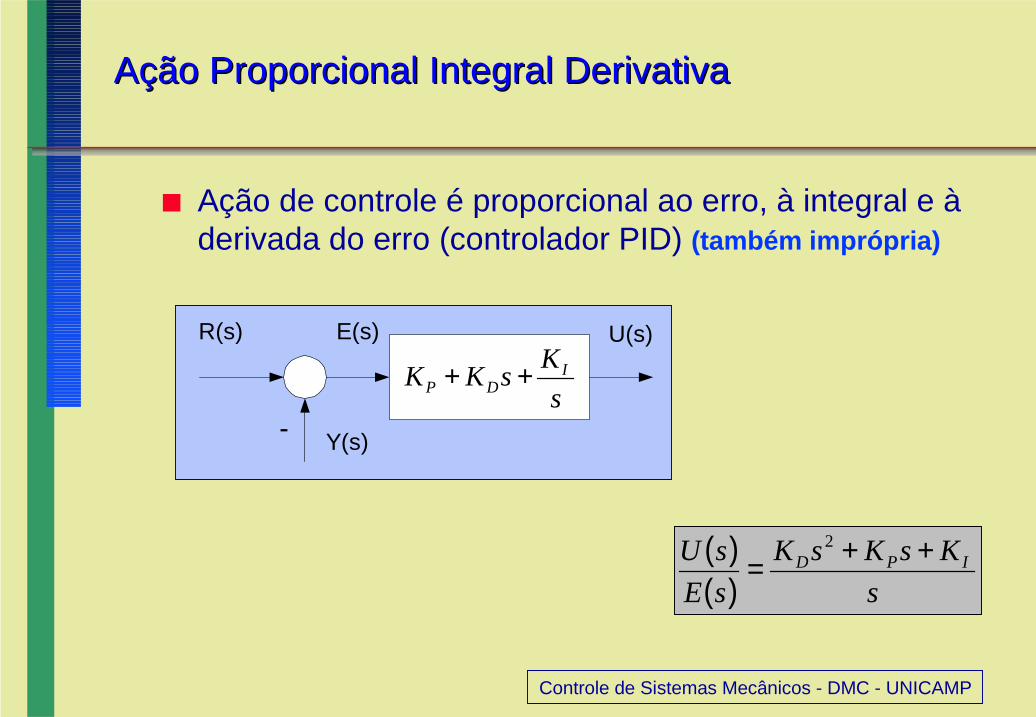
■ Ação de controle é proporcional ao erro, à integral e àderivada do erro (controlador PID) (também imprópria)
( )( ) s
KsKsK
sE
sU IPD ++=2
Ação Proporcional Integral DerivativaAção Proporcional Integral Derivativa
R(s) E(s) U(s)
Y(s)-s
KsKK I
DP ++
Controle de Sistemas Mecânicos - DMC - UNICAMP
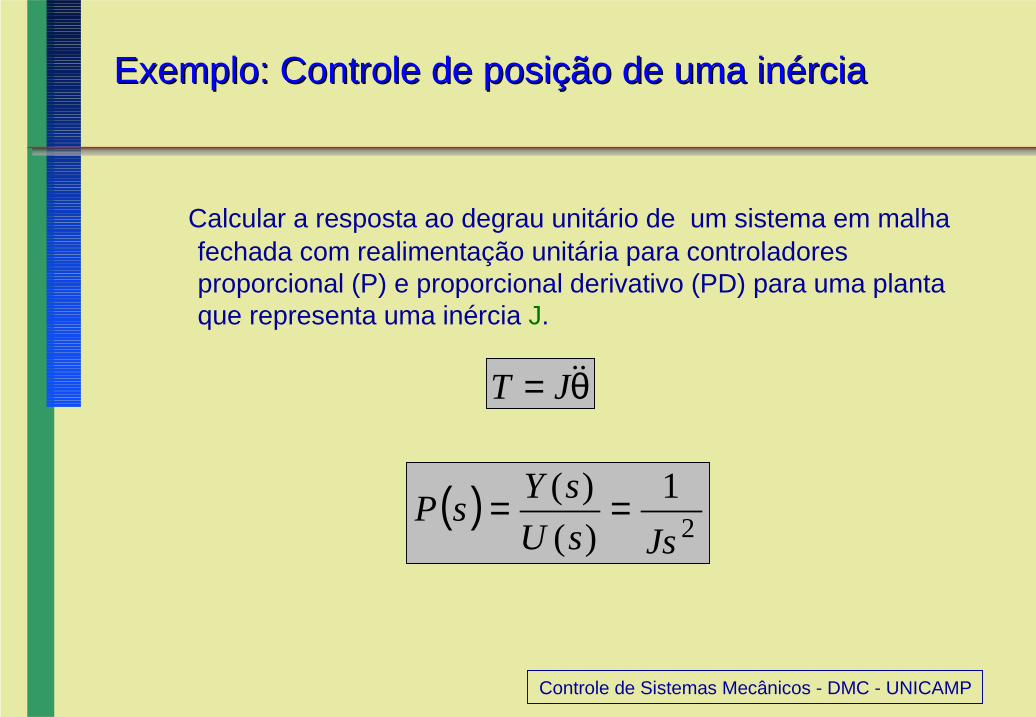
Calcular a resposta ao degrau unitário de um sistema em malhafechada com realimentação unitária para controladoresproporcional (P) e proporcional derivativo (PD) para uma plantaque representa uma inércia J.
( )2
1
)(
)(
JssU
sYsP ==
Exemplo: Controle de posição de uma inérciaExemplo: Controle de posição de uma inércia
θ= ��JT

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ O DB abaixo representa o controlador proporcional comrealimentação unitária negativa
R(s) E(s) U(s) Y(s)
-
PK 2
1
Js
Exemplo: Diagrama de blocos controlador PExemplo: Diagrama de blocos controlador P
Controle de Sistemas Mecânicos - DMC - UNICAMP
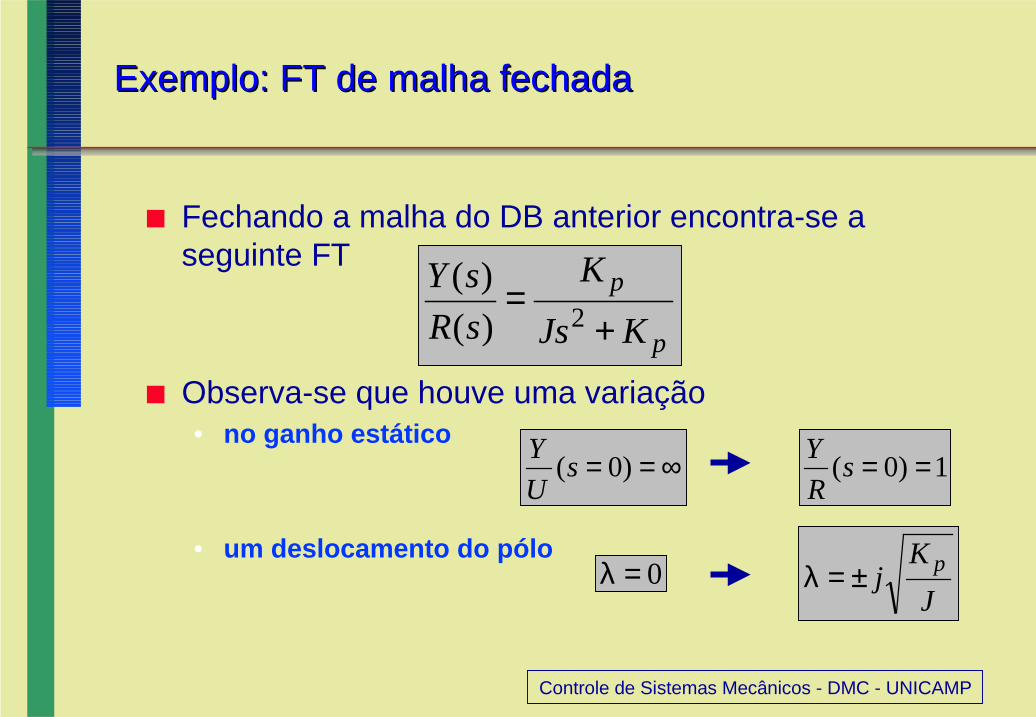
■ Fechando a malha do DB anterior encontra-se aseguinte FT
■ Observa-se que houve uma variação• no ganho estático
• um deslocamento do pólo
Exemplo: FT de malha fechadaExemplo: FT de malha fechada
1)0( ==sR
Y
J
Kj p±=λ
∞== )0(sU
Y
0=λ
p
p
KJs
K
sR
sY
+=
2)(
)(
Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Considerando a TL do degrau (1/s), a resposta seráportanto
■ Encontrando a TIL, obtém-se
Exemplo: Resposta ao degrau unitárioExemplo: Resposta ao degrau unitário
0p/cos1 ≥
tt
J
K- p
)()(
)(2
p
p
KJss
K
sR
sY
+=
Controle de Sistemas Mecânicos - DMC - UNICAMP
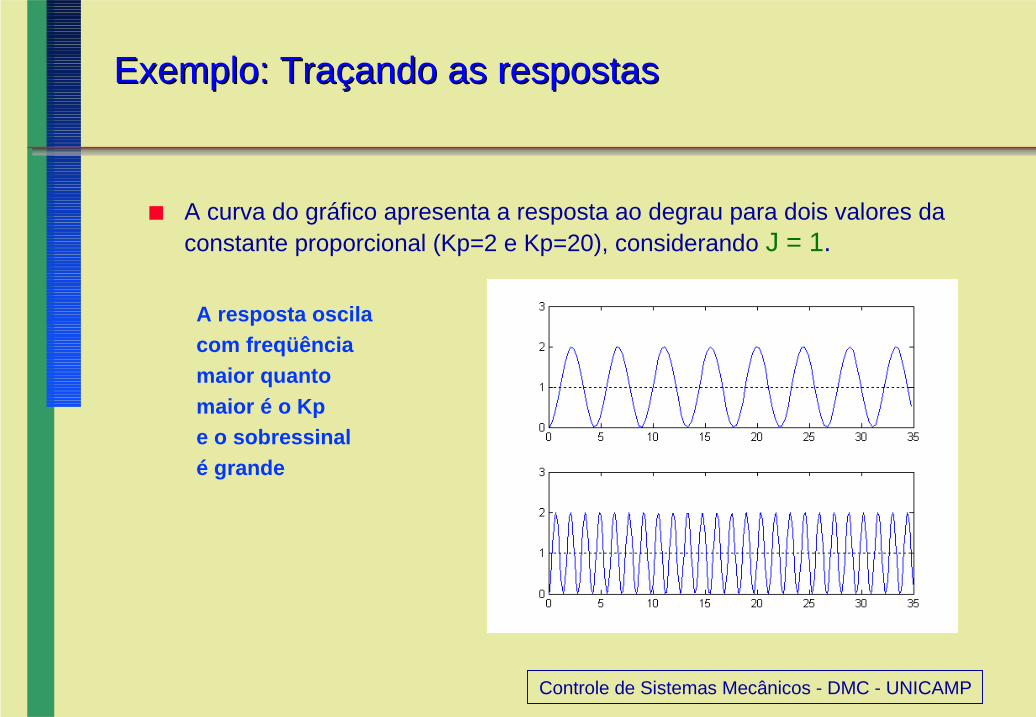
■ A curva do gráfico apresenta a resposta ao degrau para dois valores daconstante proporcional (Kp=2 e Kp=20), considerando J = 1.
A resposta oscilacom freqüênciamaior quantomaior é o Kpe o sobressinalé grande
Exemplo: Traçando as respostasExemplo: Traçando as respostas
Controle de Sistemas Mecânicos - DMC - UNICAMP
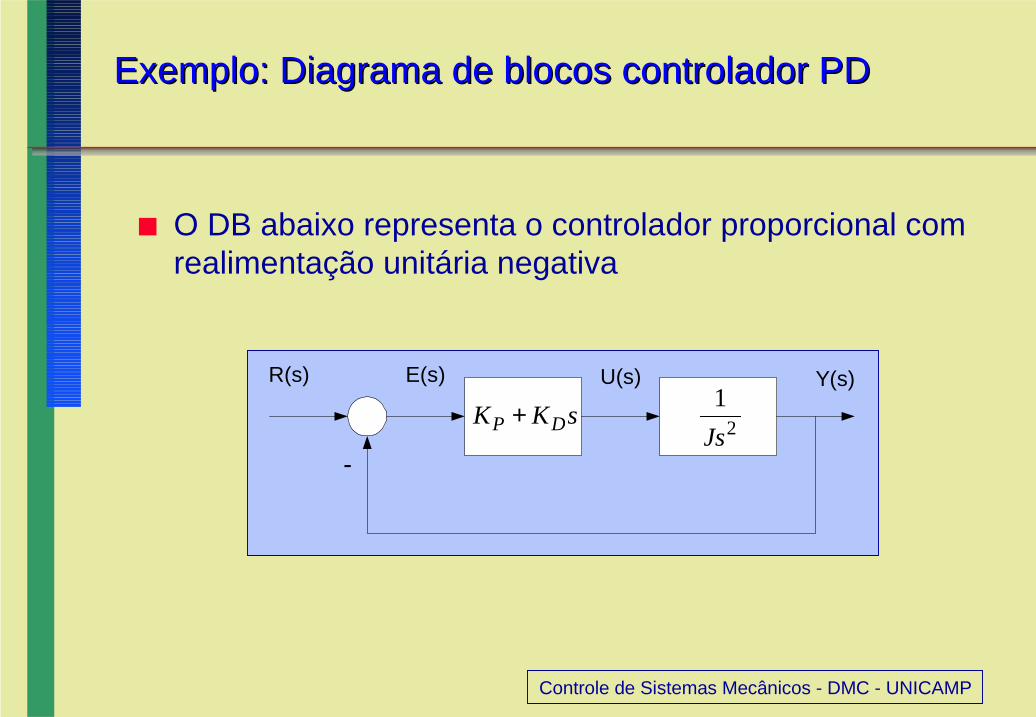
■ O DB abaixo representa o controlador proporcional comrealimentação unitária negativa
R(s) E(s) U(s) Y(s)
-
sKK DP + 2
1
Js
Exemplo: Diagrama de blocos controlador PDExemplo: Diagrama de blocos controlador PD

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Fechando a malha do DB anterior encontra-se aseguinte FT
■ Observa-se que houve uma variação• no ganho estático
• um deslocamento do pólo
Exemplo: FT de malha fechada com controlador PDExemplo: FT de malha fechada com controlador PD
1)0( ==sR
Y
J
JKKK pDD
2
42 −±−=λ
∞== )0(sU
Y
0=λ
pD
pD
KsKJs
KsK
sR
sY
++
+=
2)(
)(

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Considerando a TL do degrau (1/s), a resposta seráportanto
■ Traçando a resposta ao degrau com o comando step■ Exercício: fazer o mesmo com o Simulink
Exemplo 9.1: Resposta ao degrau unitárioExemplo 9.1: Resposta ao degrau unitário
)()(
)(2
pD
pD
KsKJss
KsK
sR
sY
++
+=
Controle de Sistemas Mecânicos - DMC - UNICAMP
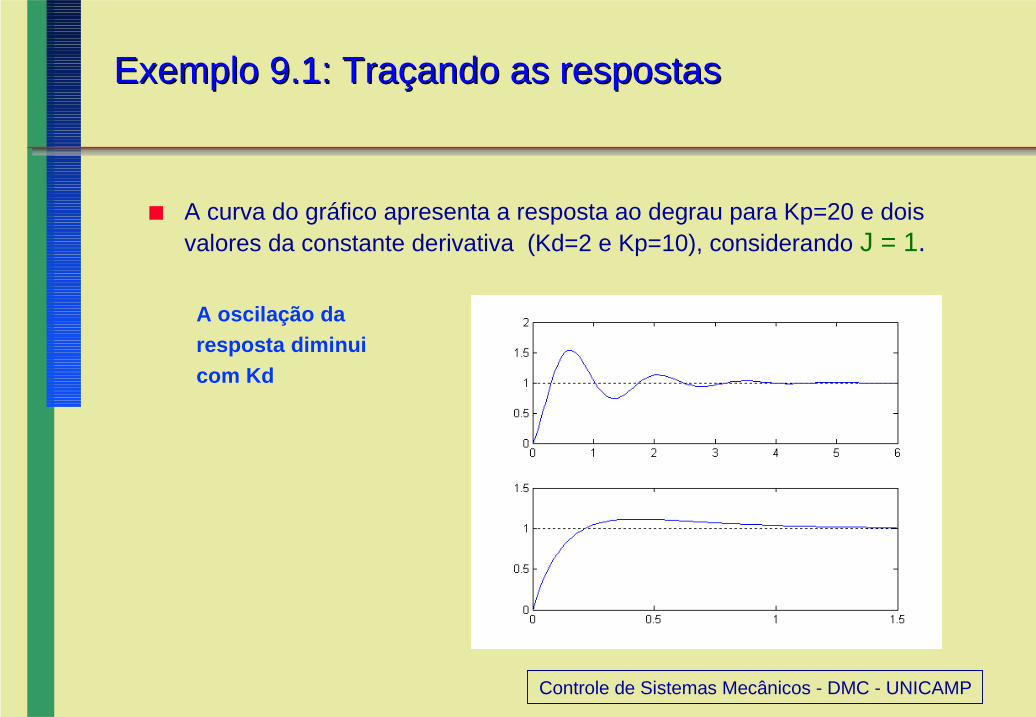
■ A curva do gráfico apresenta a resposta ao degrau para Kp=20 e doisvalores da constante derivativa (Kd=2 e Kp=10), considerando J = 1.
A oscilação daresposta diminuicom Kd
Exemplo 9.1: Traçando as respostasExemplo 9.1: Traçando as respostas
Controle de Sistemas Mecânicos - DMC - UNICAMP
Calcular a resposta ao degrau unitário de um sistema em malhafechada com realimentação unitária e controlador proporcionalpara a planta de primeira ordem com ganho estático k econstante de tempo τ . Repetir para um controlador PI e PD.
( )1)(
)(
+τ==
s
k
sU
sYsP
Exemplo 9.1: Planta de primeira ordemExemplo 9.1: Planta de primeira ordem
Controle de Sistemas Mecânicos - DMC - UNICAMP
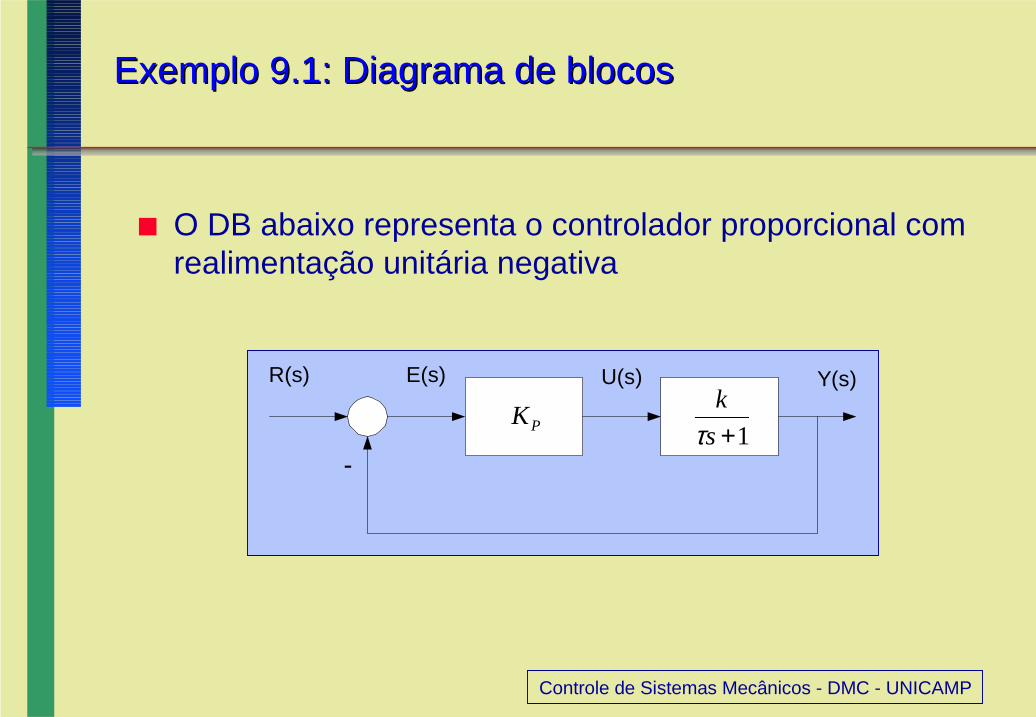
■ O DB abaixo representa o controlador proporcional comrealimentação unitária negativa
R(s) E(s) U(s) Y(s)
-
PK1+s
k
τ
Exemplo 9.1: Diagrama de blocosExemplo 9.1: Diagrama de blocos

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Fechando a malha do DB anterior encontra-se aseguinte FT
■ Observa-se que houve uma variação• no ganho estático
• um deslocamento do pólo
( )
( ) 1p
p
K kY s
R s s K kτ=
+ +
Exemplo 9.1: FT de malha fechadaExemplo 9.1: FT de malha fechada
kK
kKs
R
Y
p
p
+==
1)0(
τλ
kK p+−=
1
ksU
Y == )0(
τ−=λ 1
Controle de Sistemas Mecânicos - DMC - UNICAMP
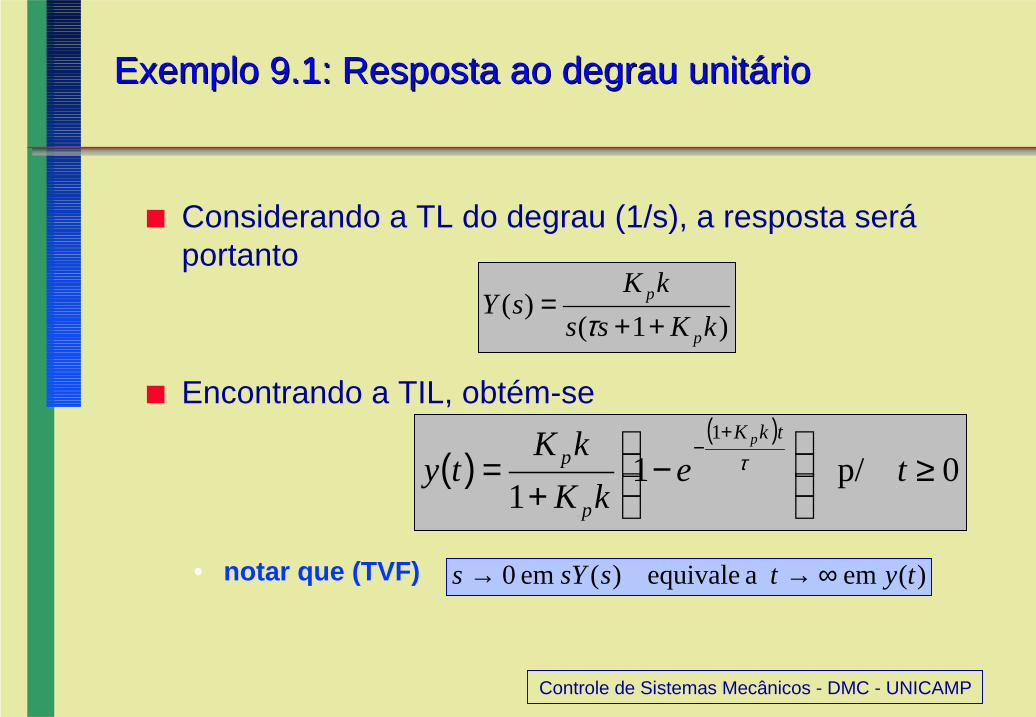
■ Considerando a TL do degrau (1/s), a resposta seráportanto
■ Encontrando a TIL, obtém-se
• notar que (TVF)
)1()(
kKss
kKsY
p
p
++=
τ
Exemplo 9.1: Resposta ao degrau unitárioExemplo 9.1: Resposta ao degrau unitário
( )( )
0p/11
1
≥
−
+=
+−
tekK
kKty
tkK
p
pp
τ
)( em a equivale)( em 0 tytssYs ∞→→
Controle de Sistemas Mecânicos - DMC - UNICAMP
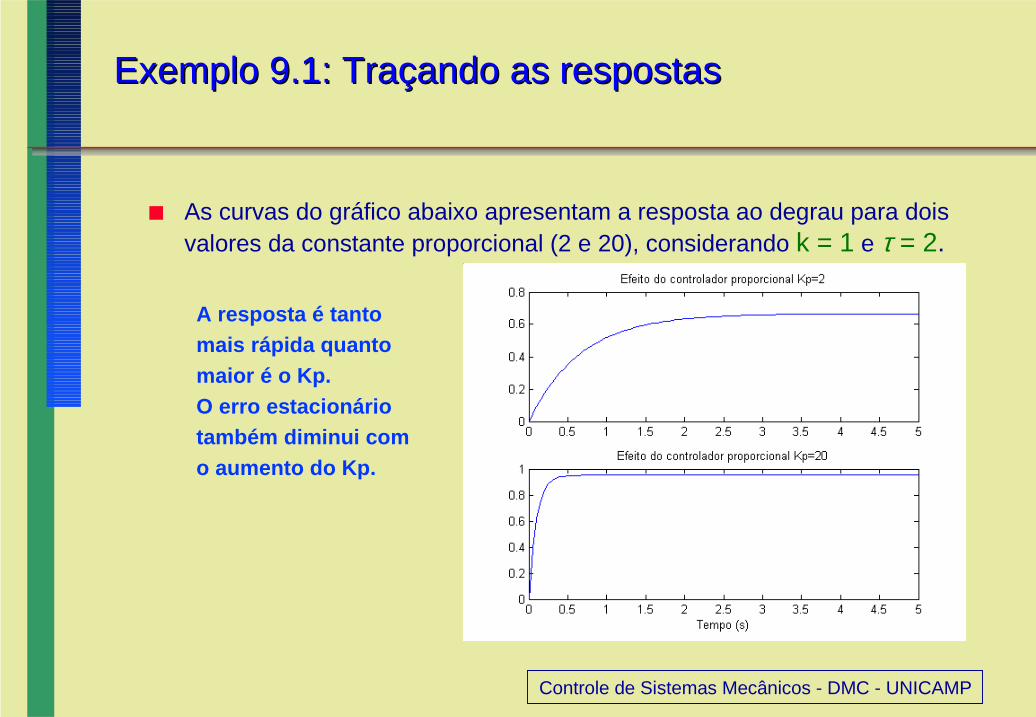
■ As curvas do gráfico abaixo apresentam a resposta ao degrau para doisvalores da constante proporcional (2 e 20), considerando k = 1 e τ = 2.
A resposta é tantomais rápida quantomaior é o Kp.O erro estacionáriotambém diminui como aumento do Kp.
Exemplo 9.1: Traçando as respostasExemplo 9.1: Traçando as respostas
Controle de Sistemas Mecânicos - DMC - UNICAMP
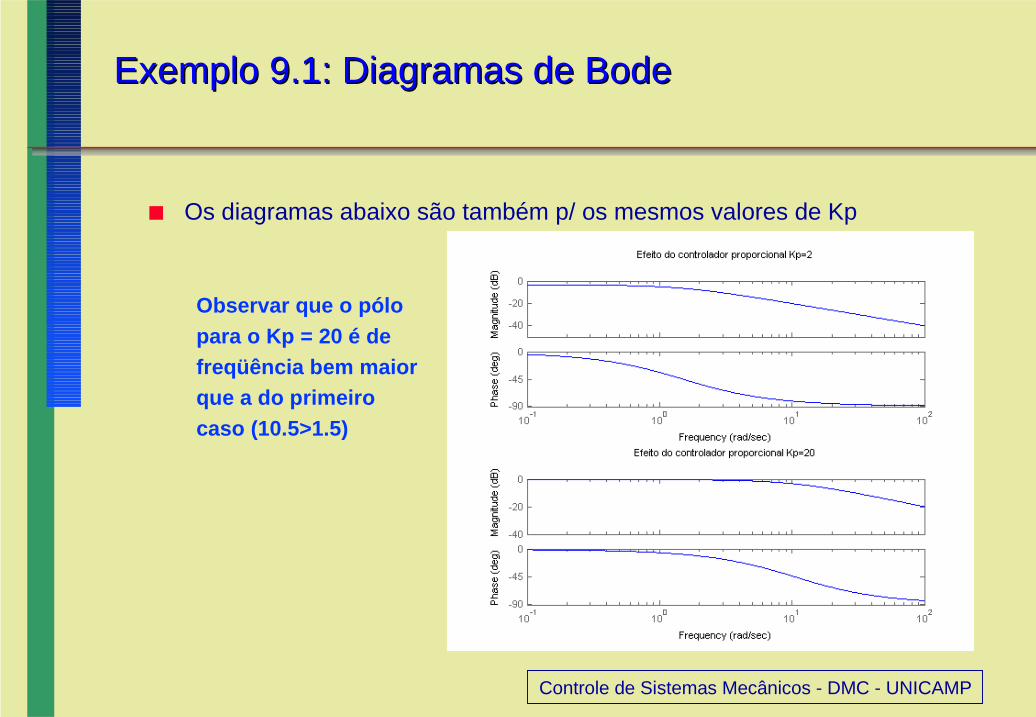
■ Os diagramas abaixo são também p/ os mesmos valores de Kp
Observar que o pólopara o Kp = 20 é defreqüência bem maiorque a do primeirocaso (10.5>1.5)
Exemplo 9.1: Diagramas de BodeExemplo 9.1: Diagramas de Bode
Controle de Sistemas Mecânicos - DMC - UNICAMP
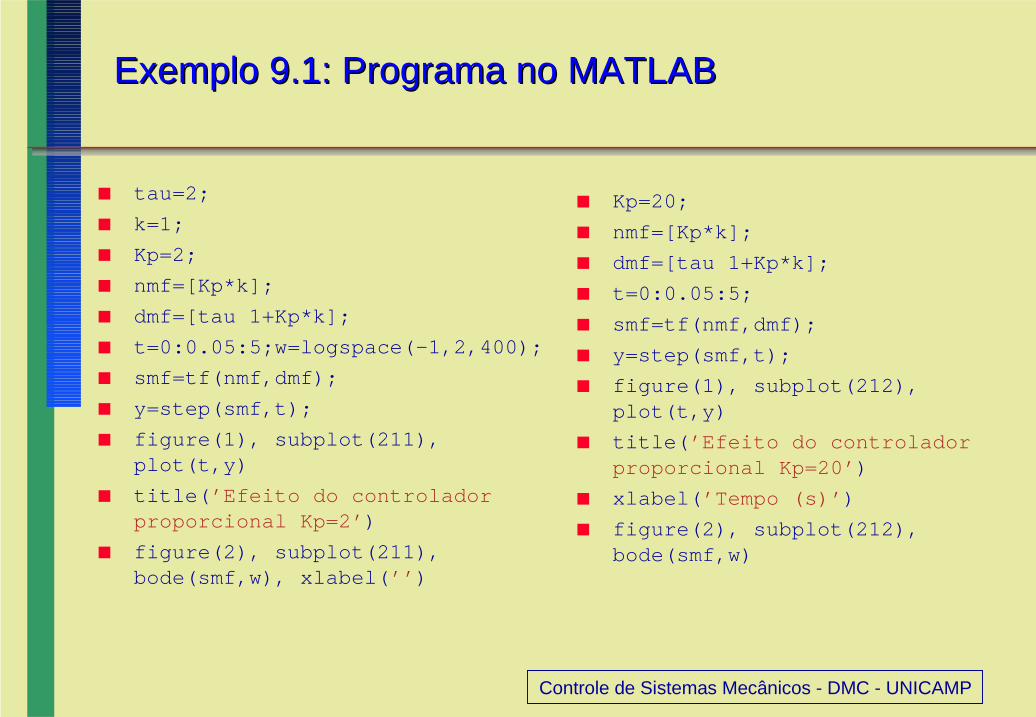
Exemplo 9.1: Programa no MATLABExemplo 9.1: Programa no MATLAB
■ tau=2;
■ k=1;
■ Kp=2;
■ nmf=[Kp*k];
■ dmf=[tau 1+Kp*k];
■ t=0:0.05:5;w=logspace(-1,2,400);
■ smf=tf(nmf,dmf);
■ y=step(smf,t);
■ figure(1), subplot(211),plot(t,y)
■ title(’Efeito do controladorproporcional Kp=2’)
■ figure(2), subplot(211),bode(smf,w), xlabel(’’)
■ Kp=20;
■ nmf=[Kp*k];
■ dmf=[tau 1+Kp*k];
■ t=0:0.05:5;
■ smf=tf(nmf,dmf);
■ y=step(smf,t);
■ figure(1), subplot(212),plot(t,y)
■ title(’Efeito do controladorproporcional Kp=20’)
■ xlabel(’Tempo (s)’)
■ figure(2), subplot(212),bode(smf,w)
Controle de Sistemas Mecânicos - DMC - UNICAMP
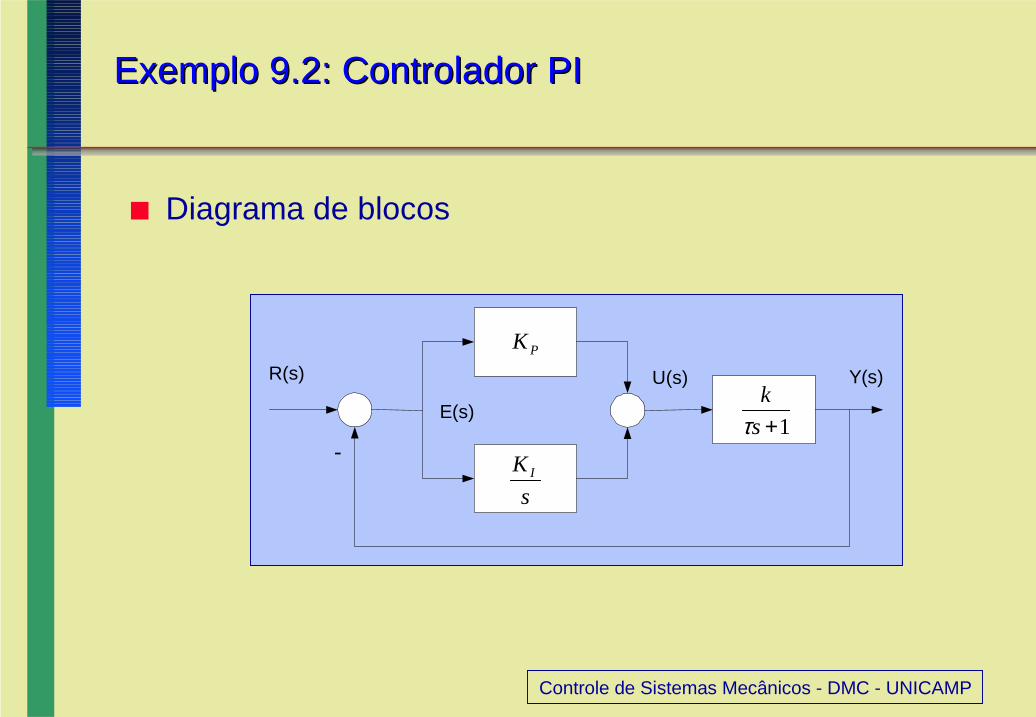
■ Diagrama de blocos
Exemplo 9.2: Controlador PIExemplo 9.2: Controlador PI
R(s)
E(s)
U(s) Y(s)
-
PK
1+s
k
τ
s
K I
Controle de Sistemas Mecânicos - DMC - UNICAMP
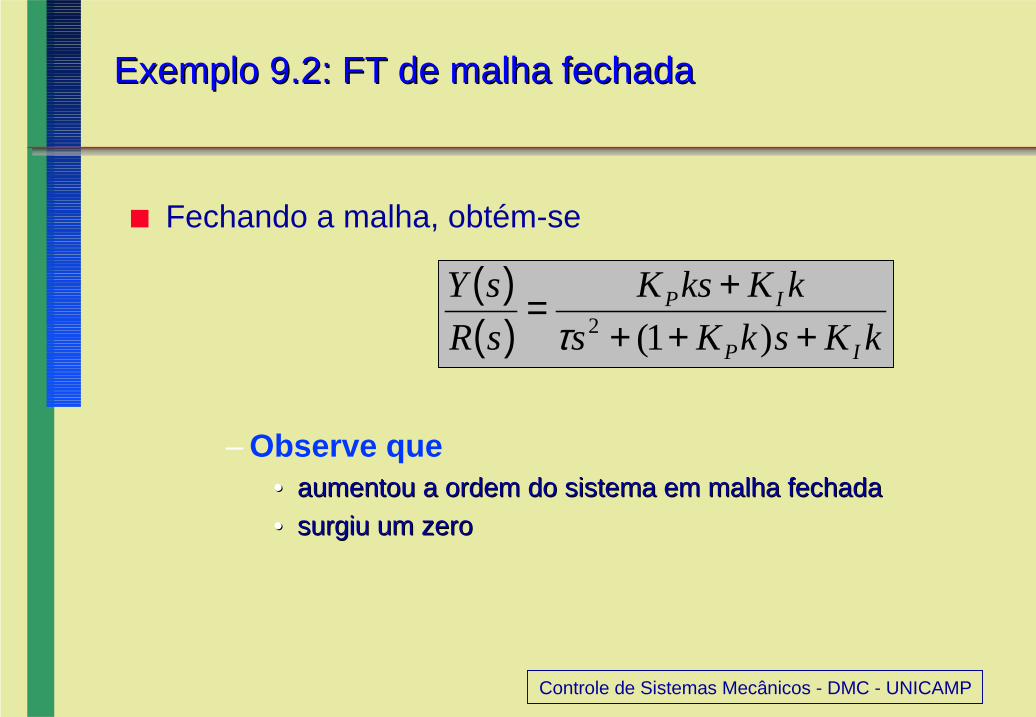
■ Fechando a malha, obtém-se
– Observe que•• aumentou a ordem do sistema em malha fechadaaumentou a ordem do sistema em malha fechada
•• surgiu um zerosurgiu um zero
( )( ) kKskKs
kKksK
sR
sY
IP
IP
++++=
)1(2τ
Exemplo 9.2: FT de malha fechadaExemplo 9.2: FT de malha fechada
Controle de Sistemas Mecânicos - DMC - UNICAMP
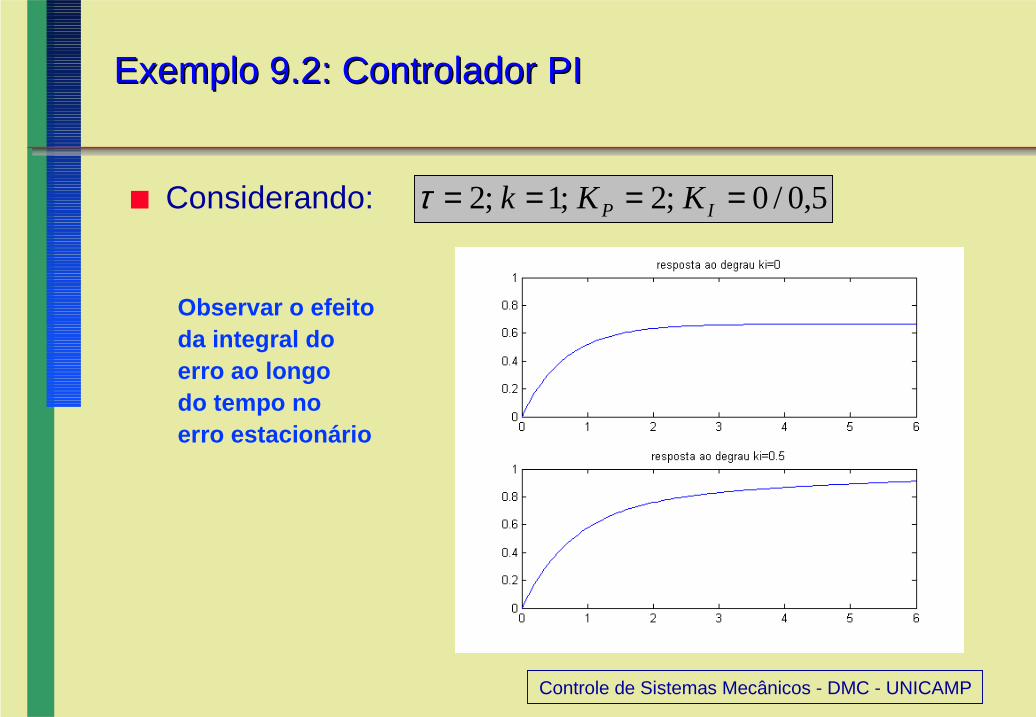
■ Considerando:
Observar o efeitoda integral doerro ao longodo tempo noerro estacionário
5,0/0;2;1;2 ==== IP KKkτ
Exemplo 9.2: Controlador PIExemplo 9.2: Controlador PI

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Os diagramas abaixo p/ valores de Ki=0/0.5
Raízes Ki=0-1.50
Raízes Ki=0.5 -1.3090 -0.1910Zero em-0.250
Exemplo 9.2: Diagramas de BodeExemplo 9.2: Diagramas de Bode
Controle de Sistemas Mecânicos - DMC - UNICAMP
Exemplo 9.2: Programa MATLABExemplo 9.2: Programa MATLAB
■ tau=2;
■ k=1;
■ Kp=2;
■ Ki=0;
■ nmf=[Kp*k ];
■ dmf=[tau 1+Kp*k];
■ t=0:0.05:6;
■ smf=tf(nmf,dmf);
■ figure(1)
■ y=step(smf,t);
■ subplot(211), plot(t,y)
■ axis([0 6 0 1])
■ title(’resposta ao degrauki=0’)
■ figure(2), subplot(211),bode(smf,w), xlabel(’’)
■ Ki=0.5;
■ nmf=[Kp*k Ki*k];
■ dmf=[tau 1+Kp*k Ki*k];
■ smf=tf(nmf,dmf);
■ figure(1)
■ y=step(smf,t);
■ subplot(212), plot(t,y)
■ axis([0 6 0 1])
■ title(’resposta ao degrauki=0.5’)
■ figure(2), subplot(212),bode(smf,w), xlabel(’’)

Controle de Sistemas Mecânicos - DMC - UNICAMP
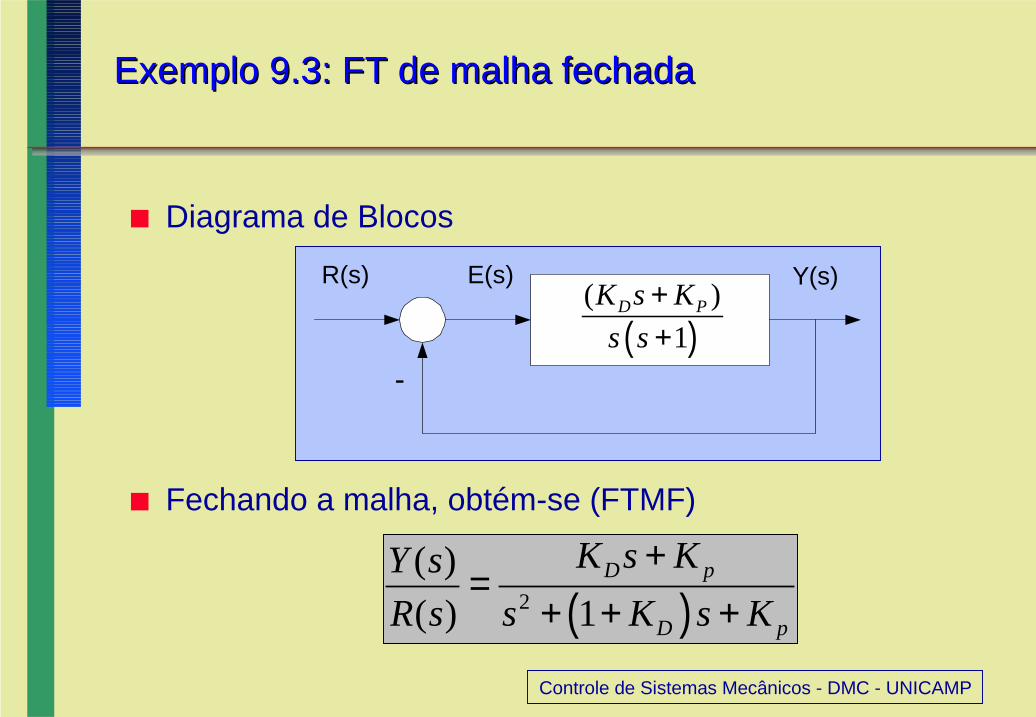
■ Diagrama de blocos
Exemplo 9.3: Controlador PDExemplo 9.3: Controlador PD
R(s)
E(s)
U(s)
-
PK
1+s
k
τ
sK D
Controle de Sistemas Mecânicos - DMC - UNICAMP
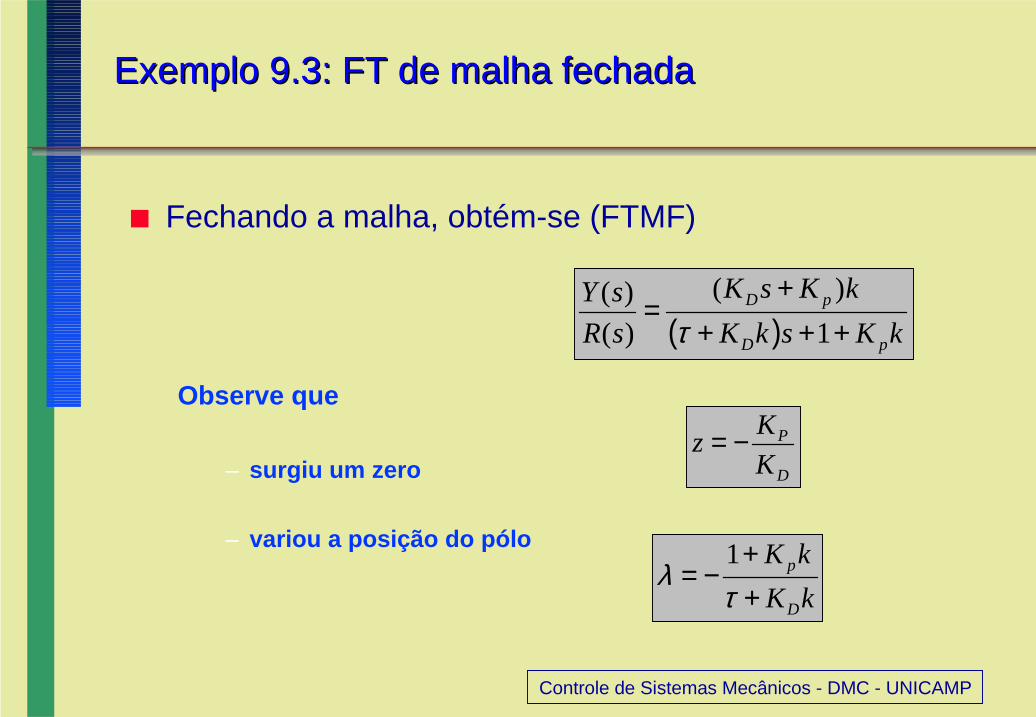
■ Fechando a malha, obtém-se (FTMF)
Observe que
– surgiu um zero
– variou a posição do pólo
Exemplo 9.3: FT de malha fechadaExemplo 9.3: FT de malha fechada
( ) kKskK
kKsK
sR
sY
pD
pD
++++
=1
)(
)(
)(
τ
D
P
K
Kz −=
kK
kK
D
p
++
−=τ
λ1
Controle de Sistemas Mecânicos - DMC - UNICAMP
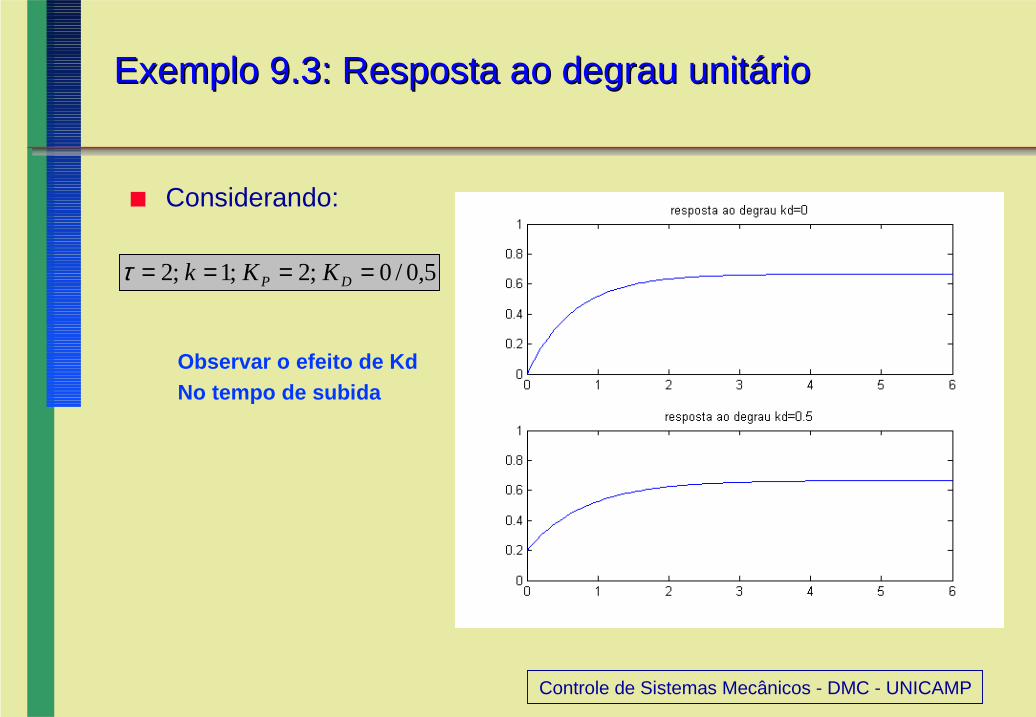
■ Considerando:
Observar o efeito de KdNo tempo de subida
5,0/0;2;1;2 ==== DP KKkτ
Exemplo 9.3: Resposta ao degrau unitárioExemplo 9.3: Resposta ao degrau unitário
Controle de Sistemas Mecânicos - DMC - UNICAMP
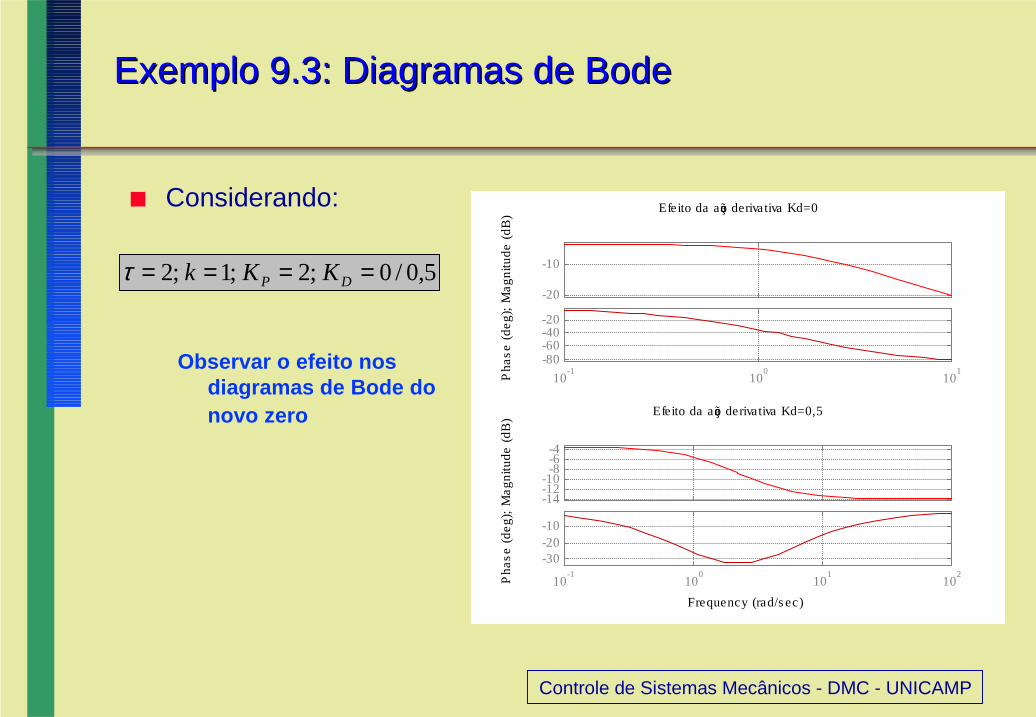
■ Considerando:
Observar o efeito nosdiagramas de Bode donovo zero
5,0/0;2;1;2 ==== DP KKkτ
Exemplo 9.3: Diagramas de BodeExemplo 9.3: Diagramas de Bode
Pha
se (
deg)
; M
agni
tude
(dB
)
Efeito da ação derivativa Kd=0
-20
-10
10-1
100
101
-80-60-40-20
Frequency (rad/s ec)
Pha
se (
deg)
; M
agni
tude
(dB
)
Efeito da ação derivativa Kd=0,5
-14-12-10
-8-6-4
10-1
100
101
102
-30-20-10
Controle de Sistemas Mecânicos - DMC - UNICAMP
Exemplo 9.3: Programa MATLABExemplo 9.3: Programa MATLAB
■ tau=2;
■ k=1;
■ Kp=2;
■ Kd=0;
■ nmf=[Kd*k Kp*k];
■ dmf=[(tau+Kd*k) 1+Kp*k];
■ t=0:0.05:6;
■ smf=tf(nmf,dmf);
■ y=step(smf,t);
■ subplot(211), plot(t,y)
■ axis([0 6 0 1])
■ title(’resposta ao degraukd=0’)
■ figure(2), subplot(211),bode(smf,w), xlabel(’’)
■ title(’Efeito do controladorPI Kp=2 Kd=0’)
■ Kd=0.5;
■ nmf=[Kd*k Kp*k];
■ dmf=[(tau+Kd*k) 1+Kp*k];
■ smf=tf(nmf,dmf);
■ t=0:0.05:6;
■ figure(1)
■ y=step(smf,t);
■ subplot(212), plot(t,y)
■ axis([0 6 0 1])
■ title(’resposta ao degrauki=0.5’)
■ figure(2), subplot(211),bode(smf,w), xlabel(’’)
■ title(’Efeito do controladorPI Kp=2 Kd=0.5’)
Controle de Sistemas Mecânicos - DMC - UNICAMP
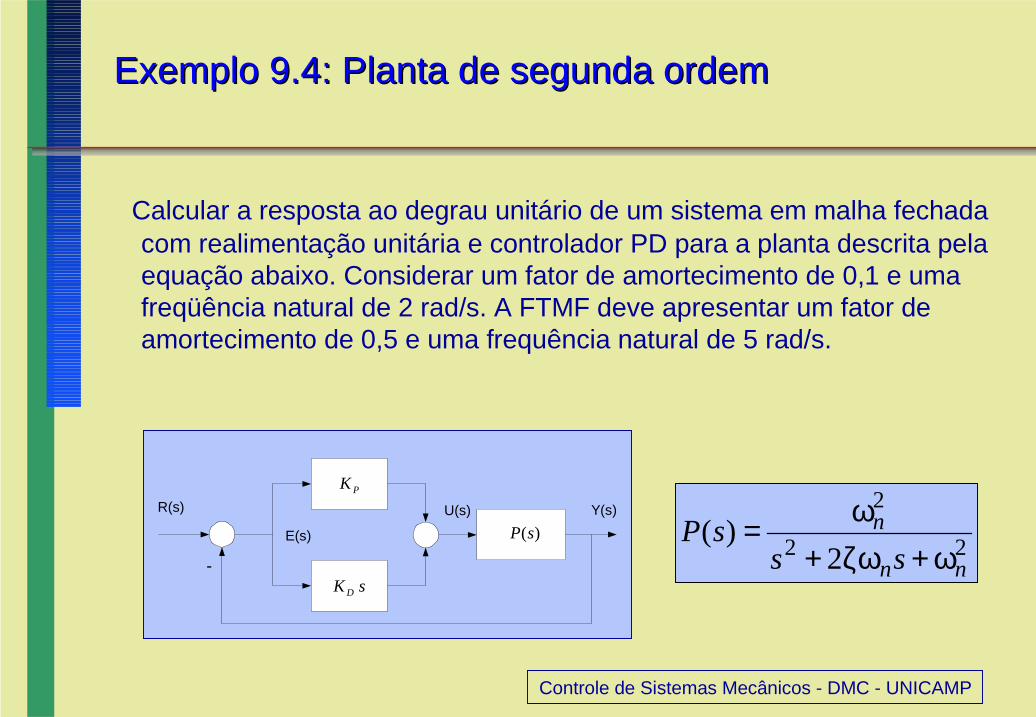
Calcular a resposta ao degrau unitário de um sistema em malha fechadacom realimentação unitária e controlador PD para a planta descrita pelaequação abaixo. Considerar um fator de amortecimento de 0,1 e umafreqüência natural de 2 rad/s. A FTMF deve apresentar um fator deamortecimento de 0,5 e uma frequência natural de 5 rad/s.
22
2
2)(
nn
n
sssP
ω+ζω+ω=
Exemplo 9.4: Planta de segunda ordemExemplo 9.4: Planta de segunda ordem
Y(s)R(s)
E(s)
U(s)
-
PK
( )P s
sK D

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Diagrama de Blocos
■ FT de malha fechada
Exemplo 9.4: Exemplo 9.4: ControladorControlador PD PD
( )( ) )1()2(
)(222
2
pnnDn
nPD
KsKs
KsK
sR
sY
+++++=
ωωζωω
R(s) E(s) Y(s)
-
22
2
2
)(
nn
nPD
ss
KsK
ωζωω
+++
Controle de Sistemas Mecânicos - DMC - UNICAMP
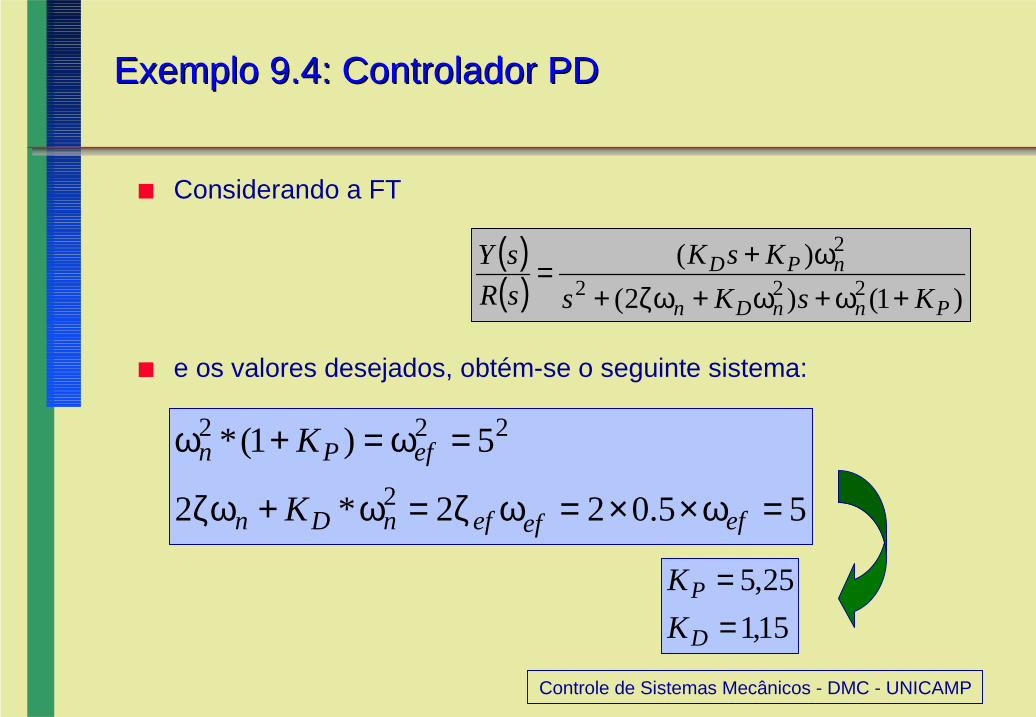
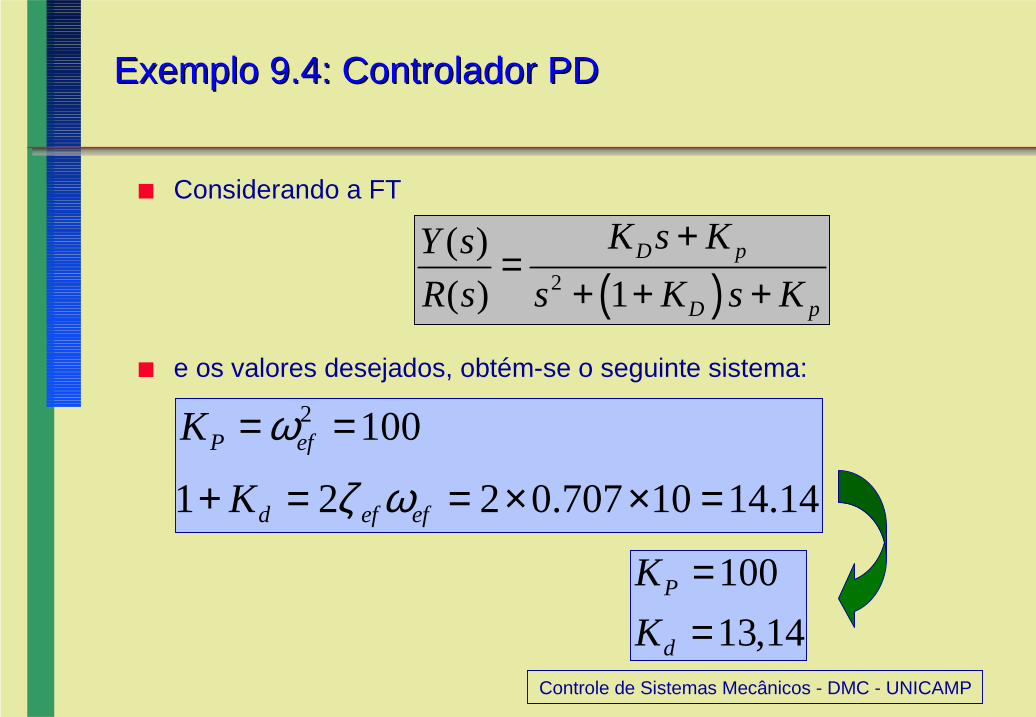
■ Considerando a FT
■ e os valores desejados, obtém-se o seguinte sistema:
Exemplo 9.4: Exemplo 9.4: ControladorControlador PD PD
( )( ) )1()2(
)(222
2
PnnDn
nPD
KsKs
KsK
sR
sY
+ω+ω+ζω+ω+=
55.022*2
5)1(*
2
222
=ω××=ωζ=ω+ζω
=ω=+ω
efefefnDn
efPn
K
K
15,1
25,5
==
D
P
K
K

Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Resposta ao degrau■ wn=2; zeta=0.1;■ Kp=5.25; Kd=0;■ b0=wn^2; a0=b0; a1=2*zeta*wn;■ np=[b0]; dp=[1 a1 a0];■ t=0:0.05:5;■ pl=tf(np,dp);y=step(pl,t);
■ nmf=[Kd Kp]*b0;■ dmf=[1 a1+Kd*b0 a0+Kp*b0];■ smf=tf(nmf,dmf); yp=step(smf,t);■ Kd=1.15; nmf=[Kd Kp]*b0;■ dmf=[1 a1+Kd*b0 a0+Kp*b0];■ smf=tf(nmf,dmf); ypd=step(smf,t);
■ figure(1), plot(t,y,t,yp,t,ypd)■ legend(‘y’,’yp’,’ypd’)
Observar que:
- KP aumenta a freq. natural
- KD aumenta o amortecimento
Exemplo 9.4: Exemplo 9.4: ControladorControlador PD PD
Controle de Sistemas Mecânicos - DMC - UNICAMP
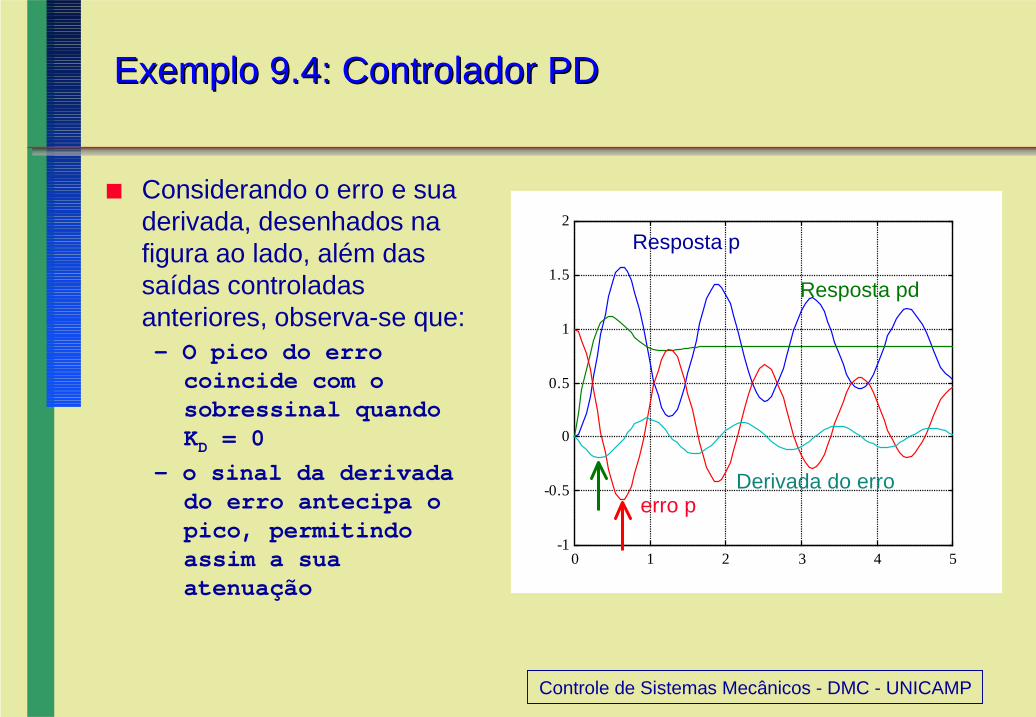
0 1 2 3 4 5-1
-0.5
0
0.5
1
1.5
2
■ Considerando o erro e suaderivada, desenhados nafigura ao lado, além dassaídas controladasanteriores, observa-se que:- O pico do erro
coincide com osobressinal quandoKD = 0
- o sinal da derivadado erro antecipa opico, permitindoassim a suaatenuação
Exemplo 9.4: Exemplo 9.4: ControladorControlador PD PD
Derivada do erro
Resposta p
Resposta pd
erro p
Controle de Sistemas Mecânicos - DMC - UNICAMP
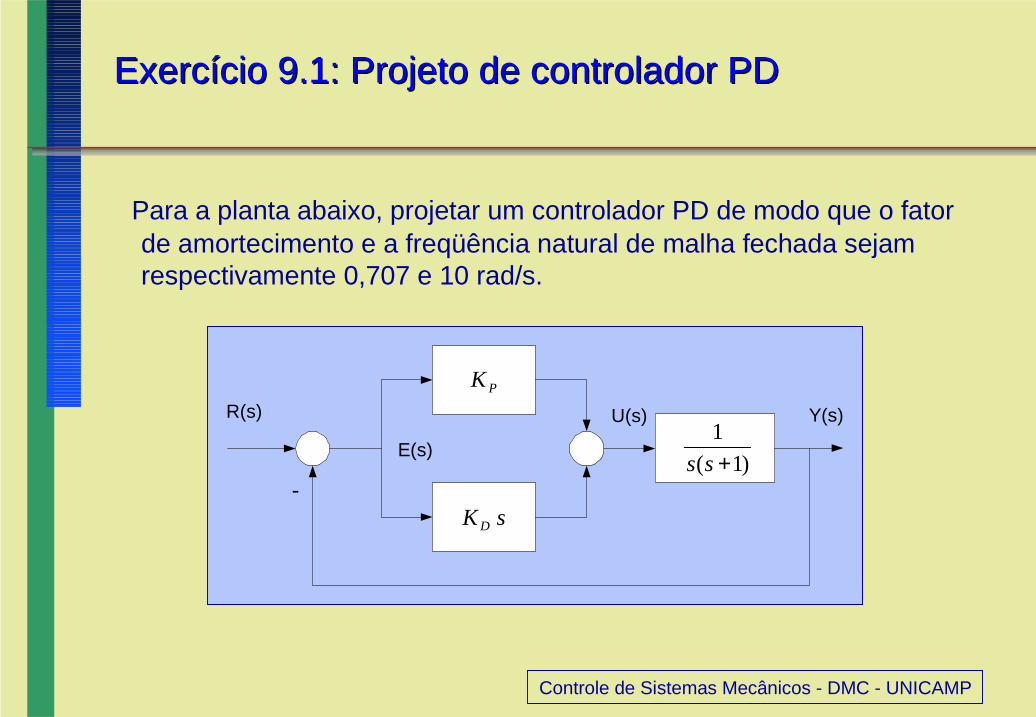
Para a planta abaixo, projetar um controlador PD de modo que o fatorde amortecimento e a freqüência natural de malha fechada sejamrespectivamente 0,707 e 10 rad/s.
Exercício 9.1: Projeto de controlador PDExercício 9.1: Projeto de controlador PD
Y(s)R(s)
E(s)
U(s)
-
PK
sK D
)1(
1
+ss
Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Diagrama de Blocos
■ Fechando a malha, obtém-se (FTMF)
Exemplo 9.3: FT de malha fechadaExemplo 9.3: FT de malha fechada
( )2
( )
( ) 1D p
D p
K s KY s
R s s K s K
+=
+ + +
R(s) E(s) Y(s)
-( )
( )
1D PK s K
s s
++
Controle de Sistemas Mecânicos - DMC - UNICAMP
■ Considerando a FT
■ e os valores desejados, obtém-se o seguinte sistema:
Exemplo 9.4: Exemplo 9.4: ControladorControlador PD PD
2 100
1 2 2 0.707 10 14.14
P ef
d ef ef
K
K
ω
ζ ω
= =
+ = = × × =
100
13,14P
d
K
K
==
( )2
( )
( ) 1D p
D p
K s KY s
R s s K s K
+=
+ + +
Controle de Sistemas Mecânicos - DMC - UNICAMP
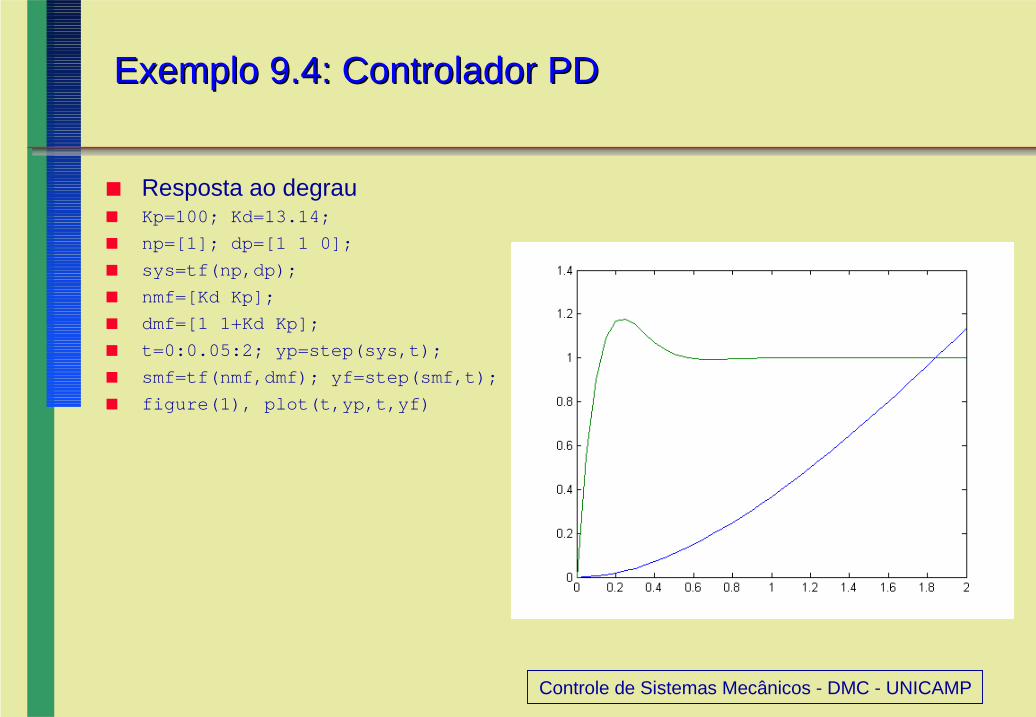
■ Resposta ao degrau■ Kp=100; Kd=13.14;
■ np=[1]; dp=[1 1 0];
■ sys=tf(np,dp);
■ nmf=[Kd Kp];
■ dmf=[1 1+Kd Kp];
■ t=0:0.05:2; yp=step(sys,t);
■ smf=tf(nmf,dmf); yf=step(smf,t);
■ figure(1), plot(t,yp,t,yf)
Exemplo 9.4: Exemplo 9.4: ControladorControlador PD PD