
ABSODEX AX9000TS/TH-U3 (Especificación PROFIBUS-DP)3.3 Diagrama de sincronización de comunicación...
24
Ver. 2 CKD Corporation SMB-63S-2 Descripción suplementaria ABSODEX AX9000TS/TH-U3 (Especificación PROFIBUS-DP) Introducción Gracias por haber adquirido nuestro ABSODEX. ABSODEX es una unidad de indización de desplazamiento directo desarrollada para impulsar intermitentemente las placas giratorias o similares de máquinas de ensamblado general industrial, máquinas de inspección, etc. flexiblemente a una precisión superior. Este documento proporciona descripción suplementaria de las especificaciones características del AX9000TS/TH de ABSODEX (especificación PROFIBUS-DP). Para el método de operación, precauciones durante la operación, elementos de mantenimiento y de inspección, etc., consulte el "Manual de instrucciones para la serie AX modelo TS/TH" contenido en el CD-ROM adjuntado.
Transcript of ABSODEX AX9000TS/TH-U3 (Especificación PROFIBUS-DP)3.3 Diagrama de sincronización de comunicación...

Ver. 2CKD Corporation
SMB-63S-2
Descripción suplementariaABSODEX AX9000TS/TH-U3(Especificación PROFIBUS-DP)
Introducción
Gracias por haber adquirido nuestro ABSODEX.
ABSODEX es una unidad de indización de desplazamiento directodesarrollada para impulsar intermitentemente las placas giratorias osimilares de máquinas de ensamblado general industrial, máquinas deinspección, etc. flexiblemente a una precisión superior.
Este documento proporciona descripción suplementaria de lasespecificaciones características del AX9000TS/TH de ABSODEX(especificación PROFIBUS-DP).
Para el método de operación, precauciones durante la operación,elementos de mantenimiento y de inspección, etc., consulte el "Manual deinstrucciones para la serie AX modelo TS/TH" contenido en el CD-ROMadjuntado.

Contenido
1. Especificaciones1.1 Configuración de producto1.2 Especificaciones generales del controlador1.3 Especificaciones de desempeño del controlador
2. Conexión2.1 Descripción del panel2.2 Conector de comunicación2.3 Conexión del cable de comunicación2.4 Interfaz de E/S
3. Función de comunicación PROFIBUS-DP3.1 Especificaciones de comunicación PROFIBUS-DP3.2 E/S remoto3.3 Diagrama de sincronización de comunicación de datos3.4 Definición del registrador de PROFIBUS-DP3.5 Monitoreo del estado de comunicación de PROFIBUS-DP3.6 Indicación de LED3.7 Indicación del LED de 7 segmentos
REVISIONES

1
1. Especificaciones
1.1 Configuración del producto
Nombre Cantidad
1 Unidad del controlador 1
Conector de alimentación del motor CN5:PC4/3-ST-7,62 (Phoenix Contact)
1
Conector del suministro de alimentación CN4:PC4/5-ST-7,62 (Phoenix Contact)
12 Accesorios
1.2 Especificaciones generales del controlador
Ítem AX9000TS/TH-U3 (especificación PROFIBUS-DP)
Principal3-200 V CA - 10% a 230 V CA + 10% (estándar)
1-100 V CA - 10% a 115 V CA + 10% (J1:opcional) (Nota 1)Alimentación
Control3-200 V CA - 10% a 230 V CA + 10% (estándar)
1-100 V CA - 10% a 115 V CA + 10% (J1:opcional) (Nota 1)
Frecuencia 50/60 Hz
Configuración Tipo modular abierto (controladores)
Rango de temperatura
ambiente defuncionamiento
0 a 50°C
Rango de humedad
relativa de funcionamiento20 a 90% HR (No se permite condensación)
Rango de temperatura
ambiente dealmacenamiento
-20 a 80°C
Rango de humedad
relativa de almacenamiento20 a 90% HR (No se permite condensación)
Atmósfera Libre de gases corrosivos y polvo
Anti-ruido 1000 V (P-P), ancho de impulso 1µseg, inicio 1 nseg
Anti-vibración 4,9 m/s2
Peso AX9000TS: Alrededor de 1,6 kg, AX9000TH: Alrededor de 2,1 kg
Nota 1) Si el ítem es “AX9000TH-U3”, no se podrá seleccionar “J1:opcional”.
2
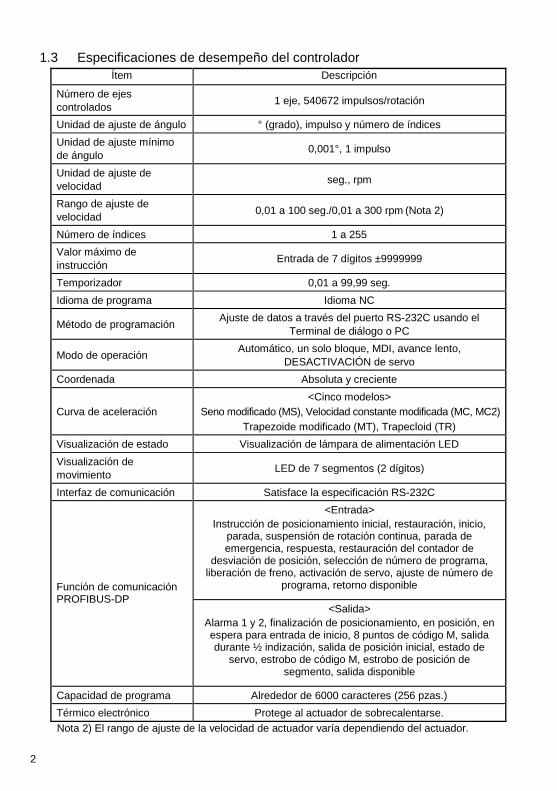
1.3 Especificaciones de desempeño del controlador
Ítem Descripción
Número de ejescontrolados
1 eje, 540672 impulsos/rotación
Unidad de ajuste de ángulo ° (grado), impulso y número de índices
Unidad de ajuste mínimode ángulo
0,001°, 1 impulso
Unidad de ajuste develocidad
seg., rpm
Rango de ajuste develocidad
0,01 a 100 seg./0,01 a 300 rpm (Nota 2)
Número de índices 1 a 255
Valor máximo de
instrucciónEntrada de 7 dígitos ±9999999
Temporizador 0,01 a 99,99 seg.
Idioma de programa Idioma NC
Método de programaciónAjuste de datos a través del puerto RS-232C usando el
Terminal de diálogo o PC
Modo de operaciónAutomático, un solo bloque, MDI, avance lento,
DESACTIVACIÓN de servo
Coordenada Absoluta y creciente
Curva de aceleración
<Cinco modelos>
Seno modificado (MS), Velocidad constante modificada (MC, MC2)
Trapezoide modificado (MT), Trapecloid (TR)
Visualización de estado Visualización de lámpara de alimentación LED
Visualización demovimiento
LED de 7 segmentos (2 dígitos)
Interfaz de comunicación Satisface la especificación RS-232C
<Entrada>
Instrucción de posicionamiento inicial, restauración, inicio,parada, suspensión de rotación continua, parada deemergencia, respuesta, restauración del contador de
desviación de posición, selección de número de programa,liberación de freno, activación de servo, ajuste de número de
programa, retorno disponibleFunción de comunicaciónPROFIBUS-DP
<Salida>
Alarma 1 y 2, finalización de posicionamiento, en posición, enespera para entrada de inicio, 8 puntos de código M, salidadurante ½ indización, salida de posición inicial, estado de
servo, estrobo de código M, estrobo de posición desegmento, salida disponible
Capacidad de programa Alrededor de 6000 caracteres (256 pzas.)
Térmico electrónico Protege al actuador de sobrecalentarse.
Nota 2) El rango de ajuste de la velocidad de actuador varía dependiendo del actuador.

3
2. Conexión
2.1 Descripción del panel
Una extensión de terminales y conectores, etc., se encuentra ubicada en el paneldelantero del controlador.
LED de visualización de movimiento7-segmentos (2 dígitos)
Detector DIP de ajuste de ganancia 1(tiempo de convergencia)
Conector del cable solventador CN2
Conector CN1
RS-232C (2-M2,6)
Detector DIP de ajuste de ganancia 2(carga)
TB1Terminal de función de seguridad
LED de alimentación de control
CN3Conector DeviceNet
TB2Terminal de frenos
LED de alimentación principal
Alimentación principal
Alimentación de control
Terminal de salidadel actuador
Terminal de toma a tierra2-M4
LED DeviceNet
TB3Terminal de parada de emergencia

4
2.2 Conector de comunicación
Abajo se muestra la disposición de los pines PROFIBUS-DP del conector decomunicación CN3 .
Disposición de pin de CN3 (D-sub 9 pines)
Se recomienda el uso de cables y conectores exclusivos para PROFIBUS-DP. Del mismomodo, un resistor de terminal será necesario al colocar este producto en el terminal de unared. Utilice un conector con un resistor de terminal.
Conector (Ejemplo): SUBCON-PLUS-PROFIB/SC2 (Phoenix Contact)
N.ºPin
Nombre deseñal
Función Descripción
1 Sin usar ―
2 Sin usar ―
3 RxD/TxD-P Enviar/recibir datos Conectar línea B (roja)
4 Sin usar ―
5 DGND GND GND para VP (terminal bus)
6 VP Alimentación +5 V Para terminal bus
7 Sin usar ―
8 RxD/TxD-N Enviar/recibir datos Conectar línea A (verde)
9 Sin usar ―
Arriba
5
2.3 Conexión del cable de comunicación
Conecte el cable de comunicación del siguiente modo.
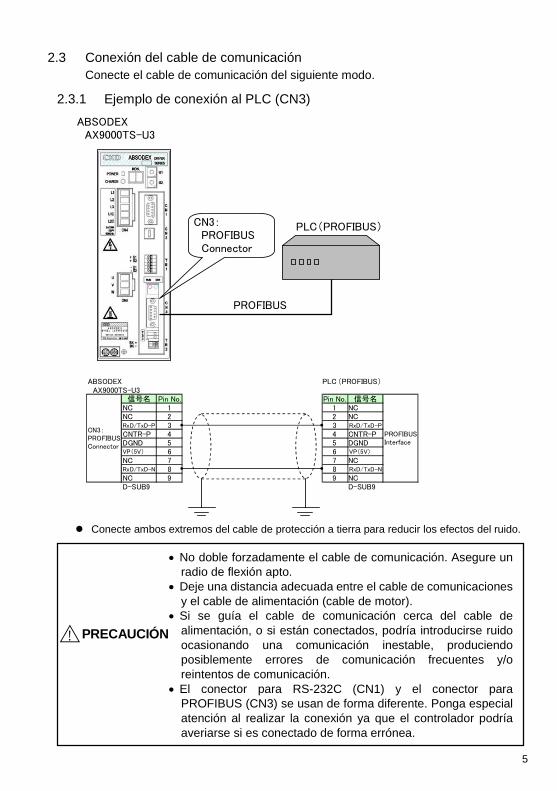
2.3.1 Ejemplo de conexión al PLC (CN3)
ABSODEXAX9000TS-U3
PLC(PROFIBUS)
PROFIBUS
CN3:PROFIBUSConnector
ABSODEX PLC(PROFIBUS)AX9000TS-U3
信号名 Pin No. Pin No. 信号名NC 1 1 NCNC 2 2 NCRxD/TxD-P 3 3 RxD/TxD-P
CNTR-P 4 4 CNTR-PDGND 5 5 DGNDVP(5V) 6 6 VP(5V)
NC 7 7 NCRxD/TxD-N 8 8 RxD/TxD-N
NC 9 9 NCD-SUB9 D-SUB9
CN3:PROFIBUSConnector
PROFIBUSInterface
Conecte ambos extremos del cable de protección a tierra para reducir los efectos del ruido.
No doble forzadamente el cable de comunicación. Asegure unradio de flexión apto.
Deje una distancia adecuada entre el cable de comunicacionesy el cable de alimentación (cable de motor).
Si se guía el cable de comunicación cerca del cable dealimentación, o si están conectados, podría introducirse ruidoocasionando una comunicación inestable, produciendoposiblemente errores de comunicación frecuentes y/oreintentos de comunicación.
El conector para RS-232C (CN1) y el conector paraPROFIBUS (CN3) se usan de forma diferente. Ponga especialatención al realizar la conexión ya que el controlador podríaaveriarse si es conectado de forma errónea.
△PRECAUCIÓN!

6
Pele el cable PROFIBUS y conecte a tierra la parte de la protección utilizando unaabrazadera FG para reducir la resistencia de la toma a tierra.
Si desea obtener más información sobre la disposición del cable decomunicación, consulte el Manual de disposición de PROFIBUS, etc.
Asegúrese de usar los cables especiales de señal compatiblescon las especificaciones de PROFIBUS.
Para aquellos proporcionados con un tornillo de fijación deconector, apriete firmemente el tornillo de fijación de conectoral insertarlo. De lo contrario el conector podría desenchufarsey ocasionar un funcionamiento erróneo. Para aquellos noproporcionados con un tornillo de fijación de conector,verifique que el pestillo del conector se inserte en su poción.
Afloje los dos tornillos de fijación antes de extraer el conector.Si se aplica demasiada fuerza sobre el conector sin aflojar losdos tornillos, podría causar daños en el conector.
Para evitar la aplicación excesiva de fuerza, extraiga elconector de forma vertical.
△PRECAUCIÓN!
Abrazadera de puesta atierra de la pantalla
Pantalla
Puesta a tierra funcional
Puesta a tierra del riel guíade cablecercano
7
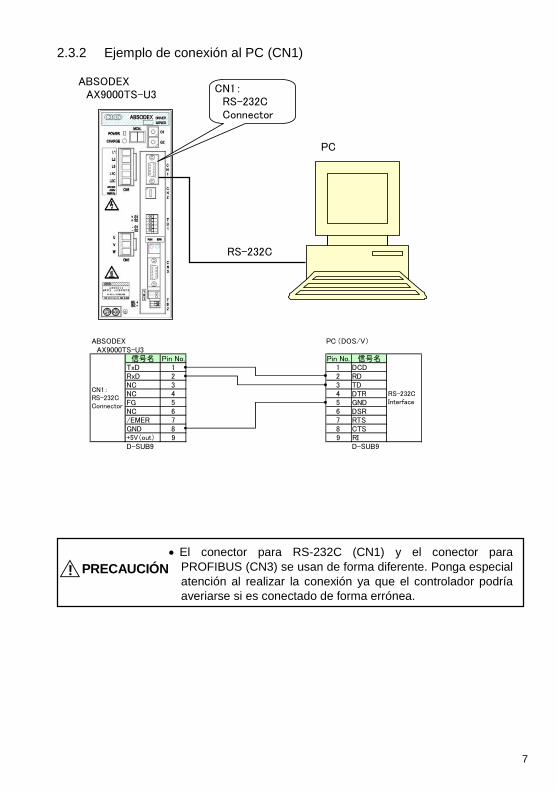
2.3.2 Ejemplo de conexión al PC (CN1)
ABSODEXAX9000TS-U3
PC
RS-232C
CN1:RS-232CConnector
ABSODEX PC(DOS/V)AX9000TS-U3
信号名 Pin No. Pin No. 信号名TxD 1 1 DCDRxD 2 2 RDNC 3 3 TDNC 4 4 DTRFG 5 5 GNDNC 6 6 DSR/EMER 7 7 RTSGND 8 8 CTS+5V(out) 9 9 RID-SUB9 D-SUB9
CN1:RS-232CConnector
RS-232CInterface
El conector para RS-232C (CN1) y el conector paraPROFIBUS (CN3) se usan de forma diferente. Ponga especialatención al realizar la conexión ya que el controlador podríaaveriarse si es conectado de forma errónea.
△PRECAUCIÓN!

8
2.4 Interfaz de E/S
Conecte la "salida del freno (TB2)" y la "entrada de parada de emergencia (TB3)"del siguiente modo.
2.4.1 Conexión de la salida del freno (TB2)
Los terminales BK+ y BK- indican los terminales de la salida del freno (corriente nominal:máx. 150 mA).Para usar el freno electromagnético es necesario contar con un suministro de alimentaciónexterno de 24 V CC.
Para conectar las cargas de inducción antes mencionadas como el relé en el contactoexterno, use aquellos que cuenten con una tensión de bobina nominal de 24 V CC y unacorriente nominal de 100 mA y tome medidas de supresión de descargas.
Realice la conexión del freno electromagnético de tal modo que el freno se libere cuando lacorriente fluya a través de BK+ y BK- y se aplica cuando se suspende la corriente, sinrelación alguna con la activación negativa o positiva.
La longitud de funda que se debe pelar en el cable debe ser de 9 o 10 mm.
El cable aplicable es AWG22 a 24 (cable único)) o AWG22 a 24 (cable trenzado).
BK +
BK-
Suministro de alimentación externa 24 V CC
(Preparado por el cliente)
Contacto externo (relé, etc.)
(Preparado por el cliente)Suministro de alimentación
externa 24 V CC
(Preparado por el cliente)
Co
ntr
ola
do
r
Medición de supresión de sobrecargas (diodo, etc.)
(Preparado por el cliente)
(No en caso de SSR)
Elemento de
protección
(Colocado en la
unidad del
actuador)
Cable del freno electromagnético
Fre
no
ele
ctro
ma
gné
tico
9~10mm
AWG22~24

9
2.4.2 Conexión de la entrada de parada de emergencia (TB3)
Tensión nominal de 24 V ±10%, corriente nominal de 5 mA
La entrada de la parada de emergencia estará activa como ajuste predeterminado.Para obtener más información sobre las instrucciones de ajuste consulte el “Manual delmodelo TH, serie AX TS”.
La parada de emergencia es una entrada de contacto “b”. Por lo tanto será activada cuandose abra la entrada de la parada de emergencia (TB3). (La parada de emergencia utilizandoPROFIBUS se activará cuando los datos de entrada estén desactivados)
La parada de emergencia podrá ser introducida utilizando el terminal de entrada TB3 o elprotocolo de comunicación PROFIBUS y si una de las entradas es abierta (o desactivada)será reconocida como parada de emergencia.→ La entrada a TB3 es necesaria para poder liberar la parada de emergencia.
La longitud de funda que se debe pelar en el cable debe ser de 8 o 9 mm.
El cable aplicable es AWG20 a 24 (cable único)) o AWG20a 22 (cable trenzado).
TB3: entrada deparada de
emergencia (E/S)
CN3: parada deemergencia
Entrada (de serie)Parada de
emergencia
Procesando entradaComunicación deserie
procesando
ABSODEX
La emergencia se detienesi cualquiera de lasentradas se abre (o
desactiva).
Suministro de alimentación externa 24 V CC
(Preparado por el cliente)
* La polaridad del suministro de
alimentación externo se puede invertir.
8~9mm
AWG20~22

10
El controlador se averiará si se conectan los terminales BK+ yBK- del controlador directamente con el frenoelectromagnético.
Si la polaridad de los terminales BK+ y BK- del controlador eserrónea, el controlador podría averiarse.Tenga cuidado al conectar el suministro de alimentaciónexterno.
Las instrucciones de funcionamiento de la salida del freno(TB2) y la entrada de parada de emergencia (TB3) sondiferentes. Ponga especial atención al realizar la conexión yaque el controlador podría averiarse si es conectado de formaerrónea.
No pulse el botón forzadamente al insertar o desconectarcables en/desde el bloque de terminal.
△PRECAUCIÓN!
11
3. Función de comunicación PROFIBUS
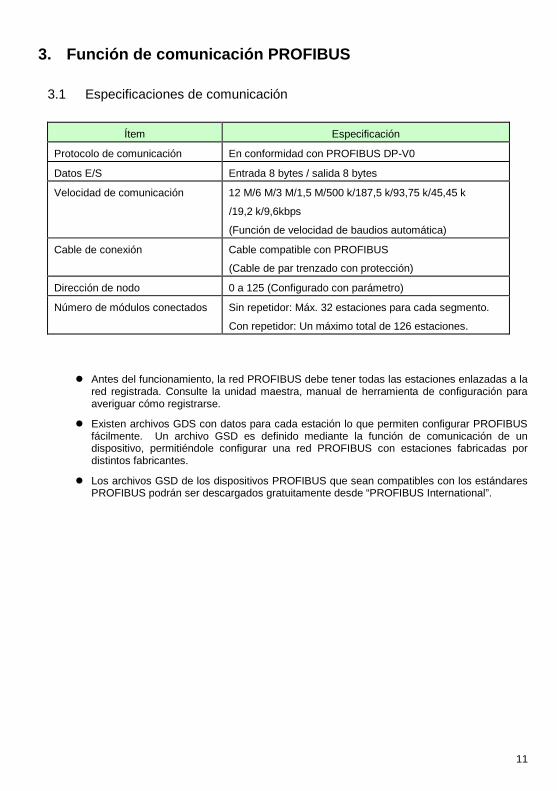
3.1 Especificaciones de comunicación
Ítem Especificación
Protocolo de comunicación En conformidad con PROFIBUS DP-V0
Datos E/S Entrada 8 bytes / salida 8 bytes
Velocidad de comunicación 12 M/6 M/3 M/1,5 M/500 k/187,5 k/93,75 k/45,45 k
/19,2 k/9,6kbps
(Función de velocidad de baudios automática)
Cable de conexión Cable compatible con PROFIBUS
(Cable de par trenzado con protección)
Dirección de nodo 0 a 125 (Configurado con parámetro)
Número de módulos conectados Sin repetidor: Máx. 32 estaciones para cada segmento.
Con repetidor: Un máximo total de 126 estaciones.
Antes del funcionamiento, la red PROFIBUS debe tener todas las estaciones enlazadas a lared registrada. Consulte la unidad maestra, manual de herramienta de configuración paraaveriguar cómo registrarse.
Existen archivos GDS con datos para cada estación lo que permiten configurar PROFIBUSfácilmente. Un archivo GSD es definido mediante la función de comunicación de undispositivo, permitiéndole configurar una red PROFIBUS con estaciones fabricadas pordistintos fabricantes.
Los archivos GSD de los dispositivos PROFIBUS que sean compatibles con los estándaresPROFIBUS podrán ser descargados gratuitamente desde “PROFIBUS International”.
12
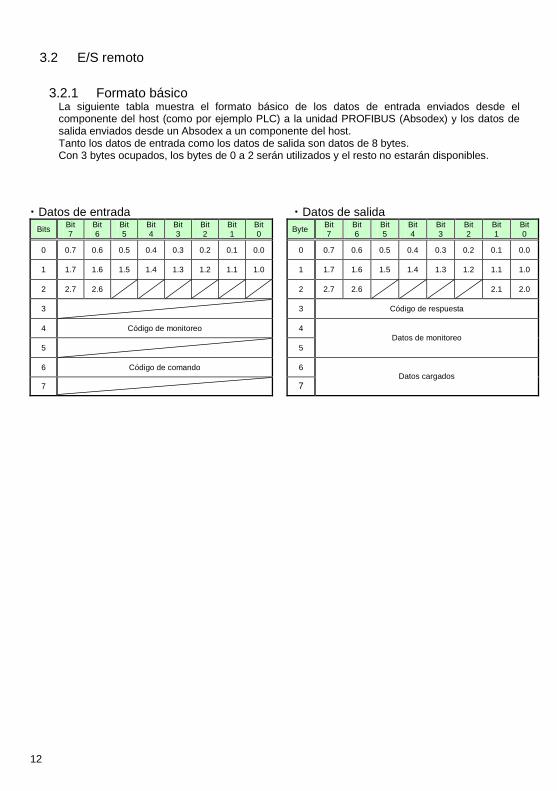
3.2 E/S remoto
3.2.1 Formato básicoLa siguiente tabla muestra el formato básico de los datos de entrada enviados desde elcomponente del host (como por ejemplo PLC) a la unidad PROFIBUS (Absodex) y los datos desalida enviados desde un Absodex a un componente del host.Tanto los datos de entrada como los datos de salida son datos de 8 bytes.Con 3 bytes ocupados, los bytes de 0 a 2 serán utilizados y el resto no estarán disponibles.
Datos de entrada Datos de salida
BitsBit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
ByteBit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
0 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0 0 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0
1 1.7 1.6 1.5 1.4 1.3 1.2 1.1 1.0 1 1.7 1.6 1.5 1.4 1.3 1.2 1.1 1.0
2 2.7 2.6 2 2.7 2.6 2.1 2.0
3 3 Código de respuesta
4 Código de monitoreo 4
5 5
Datos de monitoreo
6 Código de comando 6
7 7Datos cargados

13
3.2.2 Datos de entrada / salida
PLC → AX(entrada) AX → PLC(salida) Nº. debyte
Nombre de señal LógicaCriteri
oNº. debyte
Nombre de señal Lógica
0.0Entrada de selección de número de
programa (bit 0)Positivo Nivel 0.0 Salida de código M (bit 0) Positivo
0.1Entrada de selección de número de
programa (bit 1)Positivo Nivel 0.1 Salida de código M (bit 1) Positivo
0.2Entrada de selección de número de
programa (bit 2)Positivo Nivel 0.2 Salida de código M (bit 2) Positivo
0.3Entrada de selección de número de
programa (bit 3)Positivo Nivel 0.3 Salida de código M (bit 3) Positivo
0.4Entrada de selección de número de
programa (bit 4) / Entrada de ajuste denúmero de programa segundo dígito
PositivoNivel/Borde
0.4 Salida de código M (bit 4) Positivo
0.5
Entrada de ajuste de número deprograma, primer dígito / Entrada de
selección de número de programa (bit5)
PositivoNivel/Borde
0.5 Salida de código M (bit 5) Positivo
0.6 Entrada de restauración Positivo Borde 0.6 Salida de código M (bit 6) Positivo
0.7 Entrada de comando de retorno inicial Positivo Borde 0.7 Salida de código M (bit 7) Positivo
1.0 Entrada de inicio Positivo Borde 1.0 Salida en posición Positivo
1.1Entrada de activación de servo /
Entrada de suspensión de programaPositivo
Nivel/Borde
1.1Salida de finalización de
posicionamientoPositivo
1.2Entrada de retorno disponible /
Entrada de suspensión de rotacióncontinua
Positivo Borde 1.2Salida de espera de la
entrada de inicioPositivo
1.3Entrada de respuesta /
Restauración del contador dedesviación de posición
Positivo Borde 1.3 Salida de alarma 1 Negativo
1.4 Entrada de parada de emergencia Negativo Nivel 1.4 Salida de alarma 2 Negativo
1.5 Entrada de liberación del freno Positivo Nivel 1.5Salida de indización enprogreso 1/Salida de la
posición inicialPositivo
1.6 Reservado 1.6Salida de indización enprogreso 2/Salida del
estado servoPositivo
1.7 Reservado 1.7 Salida de estado disponible Positivo
2.0Salida del estrobo de laposición del segmento
Positivo
2.1Salida del estrobo del
código MPositivo
2.0 a
2.5Reservado
2.2 a2.5
Reservado
2.6Solicitud de ejecución de salida de
monitoreoPositivo Nivel 2.6 Monitoreo Positivo
2.7Solicitud de ejecución de código de
comandoPositivo Borde 2.7
Ejecución de código decomando completa
Positivo
PLC → AX(entrada) AX → PLC(salida)Nº. debyte
Nombre de señalNº. debyte
Nombre de señal
3 3 Código de respuesta
4 Monitoreo 4Datos monitoreados 8 bits
inferior
5 5Datos monitoreados 8 bits
superior
6 Código de comando 6Datos cargados 8 bits
inferior
7 7Datos cargados 8 bits
superior

14
Código de monitoreo (entrada: 4 byte)Código
Nº.Ítem monitoreado
Longitudde datos
Unidad Rango
00h
01hPosición actual en máximarotación (grad.)
16 bits ×10 [grad.] 0 a 3599
03hPosición actual en máximarotación (impulso)
16 bits 1/32 [impulso] 0 a 16895
05hCantidad de desviación deposición
16 bits [impulso] -32768 a 32767
07h Número de programa 16 bits [N.º] 0 a 999
08h Relé térmico electrónico 16 bits ×100 [°C] 0 a 65535
09h Velocidad de rotación 16 bits [rpm] -32768 a 32767
0Ah
0Bh
Código de comando (salida : byte 6)
Código de comando de cargaCódigo
Nº.Ítem y función
Descripción de datoscargados (byte 6.7)
00h
10h Cargando alarma actual Número de alarma actual
Alarma actual de carga (10h)Se carga el número de alarma actual.
La respuesta se establece como datos cargados (salida: byte 6.7).
Cada byte de alarma indica el modelo, y se pueden especificar hasta dos alarmas.
La indicación de la alarma es consistente a la indicación de 7 segmentos.
(El primer dígito indica los detalles de la alarma y el segundo dígito indica el número dealarma.)
Alarmas no indicadas en 0 a F
Alarma H →"d"
Alarma L →"b"
Alarma P, U y otras →"8"
Las alarmas se visualizan en el orden de "F" a "0".
En caso de "no alarma", se establece "00".
Código de respuesta (salida : byte 3)Código
Nº.Descripción de error Detalles
0 Repuesta normal El comando se ejecuta normalmente.
1 Error de código
2Error de selección deparámetro
Se especifica un número de parámetroprohibido.
3Error en el rango deescritura
Se escribe un valor excesivo.
Carga de alarma 1
Carga de alarma 2
salida:byte 6,7

15
3.3 Diagrama de sincronización de comunicación de datos
3.3.1 Código de monitoreo
La introducción del monitoreo (entrada byte 4) y la solicitud de ejecución de salida de monitoreo(entrada byte 2.6) como códigos de monitoreo establecerán los siguientes datos. Todas laspiezas de datos de 16 bits se dividirán en los 8 bits superiores y 8 bits inferiores y seránalmacenadas en la memoria. Todos los datos están en decimales. Al momento, la señal demonitoreo (salida byte 2.6) se activa simultáneamente.
Datos de monitoreo, 8 bits inferiores (salida byte 4):8 bits inferior de datos solicitados con monitoreo (entrada byte 4)
Datos de monitoreo, 8 bits superior (salida byte 5):8 bits superior de datos solicitados con monitoreo (entrada byte 4)
Si no existen datos en “salida byte 5”, se adquiere el signo. El signo es "00" en caso de "+"mientras que será "FF" en caso de "-".Los datos de monitoreo adquiridos en los registradores remotos siempre se actualizan mientrasse mantiene activada la señal de monitoreo (salida byte 2.6).Si la señal de monitoreo (salida byte 2.6) es desactivada, los datos de monitoreo (salida byte 4 y5) serán retenidos.Si un código de monitoreo no incluido en las especificaciones se establece en monitoreo(entrada byte 4), se establecerá un código de error (1) en el código de respuesta.
Monitoreo(Entrada byte 4)
Salida de monitoreoSolicitud de ejecución(Entrada byte 2.6)
Monitoreo(Salida byte 2.6)
Datos de monitoreo8 bits inferior(Salida byte 4)
Datos de monitoreo8 bits inferior(Salida byte 5)
Código de respuesta(Salida byte 3)
OFF ON OFF ON
OFF ON OFF ON
Data HOLD
16
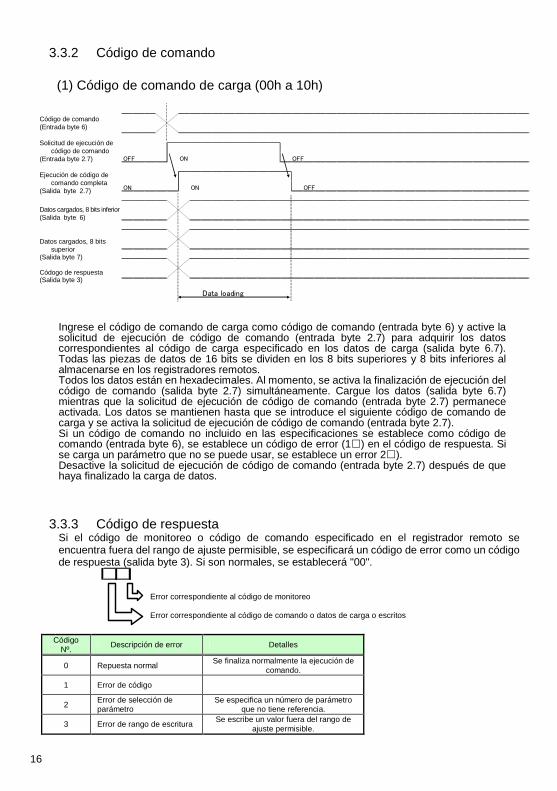
3.3.2 Código de comando
(1) Código de comando de carga (00h a 10h)
Ingrese el código de comando de carga como código de comando (entrada byte 6) y active lasolicitud de ejecución de código de comando (entrada byte 2.7) para adquirir los datoscorrespondientes al código de carga especificado en los datos de carga (salida byte 6.7).Todas las piezas de datos de 16 bits se dividen en los 8 bits superiores y 8 bits inferiores alalmacenarse en los registradores remotos.Todos los datos están en hexadecimales. Al momento, se activa la finalización de ejecución delcódigo de comando (salida byte 2.7) simultáneamente. Cargue los datos (salida byte 6.7)mientras que la solicitud de ejecución de código de comando (entrada byte 2.7) permaneceactivada. Los datos se mantienen hasta que se introduce el siguiente código de comando decarga y se activa la solicitud de ejecución de código de comando (entrada byte 2.7).Si un código de comando no incluido en las especificaciones se establece como código decomando (entrada byte 6), se establece un código de error (1) en el código de respuesta. Sise carga un parámetro que no se puede usar, se establece un error 2).Desactive la solicitud de ejecución de código de comando (entrada byte 2.7) después de quehaya finalizado la carga de datos.
3.3.3 Código de respuestaSi el código de monitoreo o código de comando especificado en el registrador remoto seencuentra fuera del rango de ajuste permisible, se especificará un código de error como un códigode respuesta (salida byte 3). Si son normales, se establecerá "00".
CódigoNº.
Descripción de error Detalles
0 Repuesta normalSe finaliza normalmente la ejecución de
comando.
1 Error de código
2Error de selección deparámetro
Se especifica un número de parámetroque no tiene referencia.
3 Error de rango de escrituraSe escribe un valor fuera del rango de
ajuste permisible.
Código de comando(Entrada byte 6)
Solicitud de ejecución decódigo de comando
(Entrada byte 2.7)
Ejecución de código decomando completa
(Salida byte 2.7)
Datos cargados, 8 bits inferior(Salida byte 6)
Datos cargados, 8 bitssuperior
(Salida byte 7)
Códogo de respuesta(Salida byte 3)
OFF ON OFF
ON ON OFF
Data loading
Error correspondiente al código de monitoreo
Error correspondiente al código de comando o datos de carga o escritos

17
3.4 Definición del registrador de PROFIBUS-DP
Siga el procedimiento descrito a continuación para usar el software de PC paraintroducir el número de estación y la velocidad de baudios. (El número de estaciónpredeterminado es "99".)
a. Pantalla de ajuste PROFIBUSSeleccione "Editar" – "PROFIBUS" en el menú de Nota de instrucción para abrir la pantalla"Registrador PROFIBUS".
b. Registrador PROFIBUS
i. Ajuste del nº de estaciónSe visualiza el ajuste del número de estación actual.Introduzca el nuevo número de estación entre 0 a 125.
ii. Ajuste de velocidad de baudiosConfigurado utilizando la función de velocidad de baudios automática. Compatiblecon 9,6 k, 19,2 k, 45,45 k, 93,75 k, 187,5 k, 500k, 1,5 M, 3 M, 6M y 12 Mbps.
iii. PROFIBUS registradorSe visualizan los valores especificados para el número de estación y velocidadde baudios.
iv. Ajuste (ABSODEX)Haga clic en este botón para transferir los nuevos datos al registro deABSODEX.
v. CerrarHaga clic en este botón para cerrar la pantalla.
Una vez introducidoel número de laestación y lavelocidad debaudios, haga clicen este botón.

18
c. Fin del ajusteDespués de haber introducido normalmente los ajustes, se visualiza una pantallade finalización.
→ Apague y reinicie la alimentación una vez finalizada la configuración.Los ajustes para el nº de estación serán efectivos una vez reiniciada la alimentación.
d. Error en el ajusteSe visualiza la siguiente pantalla si existe algún error en el ajuste del número deestación.
* Si inicializa el sistema, los ajustes de registrador de PROFIBUS volverán a susvalores predeterminados. Vuelva a establecer los ajustes de registro dePROFIBUS una vez inicializado el sistema.
* Para introducir los ajustes en el terminal de diálogo, envíe el siguiente código decomunicación en el modo de terminal.
Ejemplo: "Número de estación 25"El ajuste es "OF19H" de acuerdo a la notación hexadecimal y es "3865D" de acuerdo ala notación decimal. En el modo de terminal, envíe "L7_61_3865" para introducir elnúmero de estación la velocidad de baudios.
Valor predeterminado delparámetro:
H’0F63 (D’3939)
Datos de palabra
Otros Velocidad de
baudios
Nº. de estación
Sin usar
Fijado a H’F(Velocidad de baudiosautomática)
Nº. de estación (2 dígitos hex)
H’0 a H’7D (0 a 125)
(Predeterminado: H’63(D’99))
(8 bits superior) (8 bits inferior)

19
3.5 Monitoreo del estado de comunicación de PROFIBUS
Vista de E/SHaga clic en el botón "E/S" del menú de Nota de instrucción para abrir la pantalla "VistaE/S".
→ El estado de E/S puede ser monitorizado.“*” muestra la lógica negativa, la indicación E/S mostrará ACTIVADO si está abierta.
Haga clic en estebotón.
Monitorea el estado de laentrada de parada deemergencia de TB3 conentrada 2
nitorea el estado de E/S paralas comunicacionesPROFIBUS
20
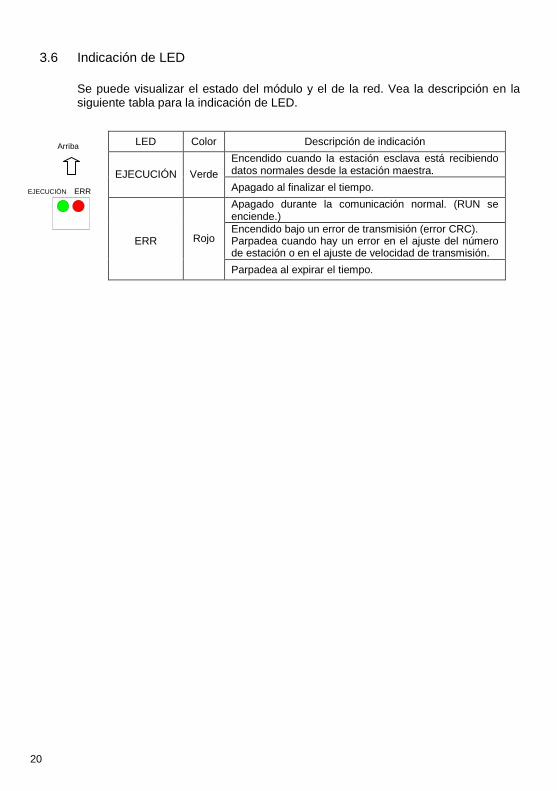
3.6 Indicación de LED
Se puede visualizar el estado del módulo y el de la red. Vea la descripción en lasiguiente tabla para la indicación de LED.
LED Color Descripción de indicación
Encendido cuando la estación esclava está recibiendodatos normales desde la estación maestra.EJECUCIÓN VerdeApagado al finalizar el tiempo.
Apagado durante la comunicación normal. (RUN seenciende.)
ERREncendido bajo un error de transmisión (error CRC).Parpadea cuando hay un error en el ajuste del númerode estación o en el ajuste de velocidad de transmisión.
Rojo
Parpadea al expirar el tiempo.
Arriba
EJECUCIÓN ERR
21
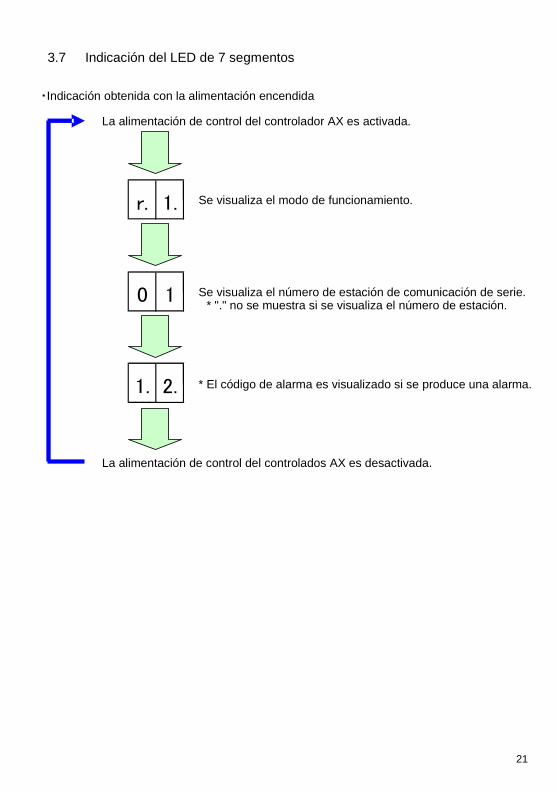
3.7 Indicación del LED de 7 segmentos
・Indicación obtenida con la alimentación encendida
La alimentación de control del controlador AX es activada.
Se visualiza el modo de funcionamiento.
Se visualiza el número de estación de comunicación de serie.* "." no se muestra si se visualiza el número de estación.
* El código de alarma es visualizado si se produce una alarma.
La alimentación de control del controlados AX es desactivada.
0 1
r. 1.
1. 2.

22
REVISIONES
Datos de
impresiónVer. Revisión
Abril 2010 ― Primera edición
Junio 2010 Ver. 2 2.4 La descripción en TB2 y TB3 ha cambiado.


















