วารสารวิศวกรรมฟาร์มและ ...วารสารFEAT...
82
วารสารวิศวกรรมฟาร์มและ เทคโนโลยีการควบคุมอัตโนมัติ Farm Engineering and Automation Technology Journal วารสารวิศวกรรมฟาร์มและเทคโนโลยีการควบคุมอัตโนมัติ เป็นแหล่งข้อมูลที่สามารถเข้าถึงได้ และ บทความทุกเรื่องได้รับการประเมินโดยผู ้ทรงคุณวุฒิ มีกาหนดตีพิมพ์เผยแพร่ ปีละ 2 ฉบับ (มกราคม – มิถุนายน และ กรกฎาคม – ธันวาคม) โดยกลุ ่มวิจัยวิศวกรรมฟาร์มและเทคโนโลยีการควบคุมอัตโนมัติ มหาวิทยาลัยขอนแก่น เรามีความยินดีรับผลงานทางวิชาการ ที่มีเนื้อหาครอบคลุมด ้านวิศวกรรมฟาร์มและ เทคโนโลยีการควบคุมอัตโนมัติ วารสารตอบรับบทความวิจัย และบทความทางวิชาการ ที่เป็นต้นฉบับภาษาไทย หรือภาษาอังกฤษ ซึ่งไม่เคยเผยแพร่ที่ใดมาก่อน ทุกๆ บทความได้รับการประเมินจากผู ้ทรงคุณวุฒิ อย่างน้อย 3 ท่าน ในสาขาที่เกี่ยวข้อง โดยมีวัตถุประสงค์เพื่อประชาสัมพันธ์ และเผยแพร ่ความรู ้ ผลงานทางวิชาการ และ งานวิจัย ในด้านวิศวกรรมฟาร์มและเทคโนโลยีการควบคุมอัตโนมัติ กองบรรณาธิการ ผศ.ดร. ชัยยันต์ จันทร์ศิริ ภาควิชาวิศวกรรมเกษตร มหาวิทยาลัยขอนแก่น ผศ.ดร. ขนิษฐา คาวิลัยศักดิ ์ ภาควิชาวิศวกรรมเคมี มหาวิทยาลัยขอนแก่น ผศ.ดร. กัลยกร ขวัญมา ภาควิชาวิศวกรรมสิ่งแวดล้อม มหาวิทยาลัยขอนแก่น ผศ.ดร.ธนา ราษฎร์ภักดี ภาควิชาวิศวกรรมอุตสาหการ มหาวิทยาลัยขอนแก่น ผศ.ดร.ราไพ เกณฑ์สาคู ภาควิชาวิชาเทคโนโลยีชีวภาพ มหาวิทยาลัยมหาสารคาม ผศ.ดร.วีรชัย อาจหาญ สาขาวิชาวิศวกรรมเครื่องกล มหาวิทยาลัยเทคโนโลยีสุรนารี ผศ.ดร.นิยม กาลังดี สานักวิชาวิทยาศาสตร์ มหาวิทยาลัยวลัยลักษณ์ ผศ.คารณ พิทักษ์ ภาควิชาวิศวกรรมอุตสาหการ มหาวิทยาลัยสงขลานครินทร์ ผศ.ดร.วิภาดา สนองราษฎร์ ภาควิชาวิศวกรรมเคมี มหาวิทยาลัยอุบลราชธานี ผศ.ดร.สิริวิชญ์ เตชะเจษฎารังสี ภาควิชาวิศวกรรมเครื่องกล มหาวิทยาลัยอุบลราชธานี ผศ.ดร.จักรมาศ เลาหวนิช สาขาวิชาวิศวกรรมเครื่องกล มหาวิทยาลัยมหาสารคาม ผศ.ฤกษ์ชัย ศรีวรมาศ ภาควิชาวิศวกรรมโยธา มหาวิทยาลัยอุบลราธานี ดร.วาธิส ลีลาภัทร ภาควิชาวิศวกรรมคอมพิวเตอร์ มหาวิทยาลัยขอนแก่น ดร.โสรัจจ์ ประวีณวงศ์วุฒิ สาขาวิชาพืชศาสตร์ มหาวิทยาลัยนครพนม บรรณาธิการ รศ.ดร. รัชพล สันติวรากร ฝ่ายจัดการวารสาร นางสาวเอื้อมพร แสงเรือง สานักงาน กลุ ่มวิจัยวิศวกรรมฟาร์มและเทคโนโลยีการควบคุมอัตโนมัติ ภาควิชาวิศวกรรมเครื่องกล คณะวิศวกรรมศาสตร์ มหาวิทยาลัยขอนแก่น 123 หมู ่ 16 ถ.มิตรภาพ ต.ในเมือง อ.เมือง จ.ขอนแก่น 40002 กาหนดเผยแพร่ ปีละ 2 ฉบับ ฉบับที่ 1 มกราคม – มิถุนายน และ ฉบับที่ 2 กรกฎาคม – ธันวาคม พิมพ์ที ่ โรงพิมพ์มหาวิทยาลัยขอนแก่น ISSN : 2408 – 0985
Transcript of วารสารวิศวกรรมฟาร์มและ ...วารสารFEAT...

วารสารวศวกรรมฟารมและ เทคโนโลยการควบคมอตโนมต
Farm Engineering and Automation Technology Journal
วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต เปนแหลงขอมลทสามารถเขาถงได และ บทความทกเรองไดรบการประเมนโดยผทรงคณวฒ มก าหนดตพมพเผยแพร ปละ 2 ฉบบ (มกราคม – มถนายน และ กรกฎาคม – ธนวาคม ) โดยกลม วจย วศวกรรมฟารมและเทค โนโลยการควบคมอต โนมต มหาวทยาลยขอนแกน เรามความยนดรบผลงานทางวชาการ ทมเนอหาครอบคลมดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต วารสารตอบรบบทความวจย และบทความทางวชาการ ทเปนตนฉบบภาษาไทย หรอภาษาองกฤษ ซงไมเคยเผยแพรทใดมากอน ทกๆ บทความไดรบการประเมนจากผทรงคณวฒ อยางนอย 3 ทาน ในสาขาทเกยวของ โดยมวตถประสงคเพอประชาสมพนธ และเผยแพรความร ผลงานทางวชาการ และงานวจย ในดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต กองบรรณาธการ ผศ.ดร. ชยยนต จนทรศร ภาควชาวศวกรรมเกษตร มหาวทยาลยขอนแกน ผศ.ดร. ขนษฐา ค าวลยศกด ภาควชาวศวกรรมเคม มหาวทยาลยขอนแกน ผศ.ดร. กลยกร ขวญมา ภาควชาวศวกรรมสงแวดลอม มหาวทยาลยขอนแกน ผศ.ดร.ธนา ราษฎรภกด ภาควชาวศวกรรมอตสาหการ มหาวทยาลยขอนแกน ผศ.ดร.ร าไพ เกณฑสาค ภาควชาวชาเทคโนโลยชวภาพ มหาวทยาลยมหาสารคาม ผศ.ดร.วรชย อาจหาญ สาขาวชาวศวกรรมเครองกล มหาวทยาลยเทคโนโลยสรนาร ผศ.ดร.นยม ก าลงด ส านกวชาวทยาศาสตร มหาวทยาลยวลยลกษณ ผศ.ค ารณ พทกษ ภาควชาวศวกรรมอตสาหการ มหาวทยาลยสงขลานครนทร ผศ.ดร.วภาดา สนองราษฎร ภาควชาวศวกรรมเคม มหาวทยาลยอบลราชธาน ผศ.ดร.สรวชญ เตชะเจษฎารงส ภาควชาวศวกรรมเครองกล มหาวทยาลยอบลราชธาน ผศ.ดร.จกรมาศ เลาหวนช สาขาวชาวศวกรรมเครองกล มหาวทยาลยมหาสารคาม ผศ.ฤกษชย ศรวรมาศ ภาควชาวศวกรรมโยธา มหาวทยาลยอบลราธาน ดร.วาธส ลลาภทร ภาควชาวศวกรรมคอมพวเตอร มหาวทยาลยขอนแกน ดร.โสรจจ ประวณวงศวฒ สาขาวชาพชศาสตร มหาวทยาลยนครพนม บรรณาธการ รศ.ดร. รชพล สนตวรากร ฝายจดการวารสาร นางสาวเออมพร แสงเรอง ส านกงาน กลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ภาควชาวศวกรรมเครองกล คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน 123 หม 16 ถ.มตรภาพ ต.ในเมอง อ.เมอง จ.ขอนแกน 40002 ก าหนดเผยแพร ปละ 2 ฉบบ ฉบบท 1 มกราคม – มถนายน และ ฉบบท 2 กรกฎาคม – ธนวาคม พมพท โรงพมพมหาวทยาลยขอนแกน ISSN : 2408 – 0985
วารสารวศวกรรมฟารมและ เทคโนโลยการควบคมอตโนมต
Farm Engineering and Automation Technology Journal
Farm Engineering and Automation Technology Journal is an open access and peer-reviewed journal published twice a year by Farm Engineering and Automation Technology Research Group, Khon Kaen University (January – June and July – December). We welcome submission from all fields of Farm Engineering and Automation Technology. The journal accepts Thai/English manuscripts of original research and review articles, which have never been published elsewhere. Every published manuscripts are reviewed by at least 3 experts in the relevant field. Our purpose in to promote and disseminate knowledge, academic work and research in Farm Engineering and Automation Technology. Editorial Board Asst.Prof.Dr.Chaiyan Chansiri Department of Agricultral Engineering Khon Kaen University Asst.Prof.Dr.Khanita Khamwilaisak Department of Chemical Engineering Khon Kaen University Asst.Prof.Dr.Kulyakorn Khunmar Department of Environmental Engineering Khon Kaen University Asst.Prof.Dr.Thana Radpukdee Department of Industrial Engineering Khon Kaen University Asst.Prof.Dr.Rampai Gaensakoo Department of Biotechnology Mahasarakham University Asst.Prof.Dr.Weerachai Arjharn School of Mechanical Engineering Suranaree University of Technology Asst.Prof.Dr.Niyom Kamlangdee School of science Walailak University Asst.Prof.Kumron Pitaks Department of Industrial Engineering Prine of Songkla University Asst.Prof.Dr.Wipada Sanongraj Department of Environmental Engineering Ubon Ratchathani University Asst.Prof.Dr.Sirivit Taechajedcadarungsri Department of Mechanical Engineering Ubon Ratchathani University Asst.Prof.Dr.Juckamas Laohavanich Department of Mechanical Engineering Mahasarakham University Asst.Prof.Rerkchai Srivoramas Department of Civil Engineering Ubon Ratchathani University Dr.Watis Leelapatra Department of Computer Engineering Khon Kaen University Dr.Sorat Praweenwongwuthi Department of Plant Science Nakhon Phanom University Editor-in-chief Assoc.Prof.Dr.Ratchaphon Suntivarakorn Production team Ms.Uamporn Saengruang Editorial Office Farm Engineering and Automation Technology Research Group, Department of
Mechanical Engineering, Faculty of Engineering, Khon Kaen University,123 Moo16 Mittraphap Road,Nai Muang Sub-district,Muang District,Khon Kaen Province,40002
Publication Frequency Biannual (Issue 1, January-June, Issue 2, July-December) Printing House Khon Kaen University Printing ISSN : 2408-0985
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน
______________________________________________________________________ จดมงหมายและขอบเขต
วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน FEAT JOURNAL (Farm Engineering and Automation Technology Journal, Khon Kaen University: FEAT) เปนวารสารทางวช าการ ซ งบทความทก เ รอ งได รบ การประ เม น โดยผ ท รงคณ วฒ ท งจ ากภายในและภายนอกมหาวทยาลยขอนแกน (peer-reviewed journal) วารสารรบผลงานทางวชาการทเปนตนฉบบ (original) ในดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต เพอเผยแพรเทคโนโลยทมคณคาแกนกวจย นกวชาการ นกศกษา และผสนใจทวไป โดยวารสารเครงครดในเรองผลงานวชาการทเปนตนฉบบ และไมใชผลงานทคดลอก โดยวารสารม ก าหนดออกทก 6 เดอน ปละ 2 ฉบบ ซงบทความทกบทความ จะตองผานการพจารณาจากผทรงคณวฒอยางนอย 3 ทาน ทงจากภายในและภายนอก มหาวทยาลยขอนแกน มการเผยแพรในรปเลม ส าหรบจดสงใหหนวยงานหรอผทสนใจ และเผยแพรผานเวบไซตของกลมวจยวศวกรรมฟารมและการควบคมอตโนมต มหาวทยาลยขอนแกน ทเวบไซต http://feat.kku.ac.th/
ขอบเขตของเนอหาทตพมพในวารสาร ประกอบดวยบทความทเกยวของ ในประเดนดงตอไปน 1. Farm Engineering and Technology 2. Automation Technology 3. Environmental Technology and Management 4. Energy Conservation and Alternative Energy Technology 5. Agricultural Machine Design 6. Material Engineering Technology 7. Innovation Technology for Farm and related Industries 8. Logistics 9. Farm and related Industries Management 10. Related Topics for Farm Engineering and Automation Technology
จดท าและเผยแพรโดย กลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน (Farm Engineering and Automation Technology : FEAT) คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน อ. เมอง จ. ขอนแกน 40002 โทร. 098-2269153 email: [email protected]
FEAT Journal (Farm Engineering and Automation Technology Journal, Khon Kaen University)
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน
บทบรรณาธการ _________________________________________________________ เรยน ทานสมาชกวารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต และผอานทกทาน
วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต (Farm Engineering and Automation Technology Journal : FEAT Journal) ปท 3 ฉบบท 1 ประจ าเดอนมกราคม – มถนายน 2560 ฉบบน เปนปท 3 ของกลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน โดยมวตถประสงคมงเนนทจะเผยแพรองคความร ดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ใหนกวจย นกวชาการ นกศกษา ผประกอบการ และประชาชนทวไป ไดทราบ และสามารถเรยนร น าไปตอยอดความร และแกไขปญหาในการท างาน ดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมตได วารสารน มก าหนดตพมพทก 6 เดอน ปละ 2 ฉบบ ซงบทความทกบทความจะตองผานการพจารณาจากผทรงคณวฒอยางนอย 3 ทาน ทงจากภายในและภายนอก มหาวทยาลยขอนแกน ในฉบบน มบทความวจย จ านวน 7 บทความ ซงทานสามารถตดตาม และอานบทความตนฉบบไดทเวบไซต http://feat.kku.ac.th/
กลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต หวงเปนอยางยงวา วารสารเลมนจะเปนแหลงเรยนรดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ใหแกผสนใจทวไปได และขอขอบพระคณนกวจย ทไดสงบทความมาลงตพมพ หากมค าตชมหรอขอเสนอแนะใดเกยวกบวารสาร สามารถตดตอได โดยตรงทกลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน ผานเวบไซตขางตน หรอ Email : [email protected]
รศ.ดร.รชพล สนตวรากร บรรณาธการ
[email protected] 30 มถนายน 2560
FEAT Journal (Farm Engineering and Automation Technology Journal, Khon Kaen University)
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน
บทบรรณาธการ _________________________________________________________ เรยน ทานสมาชกวารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต และผอานทกทาน
วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต (Farm Engineering and Automation Technology Journal : FEAT Journal) ปท 3 ฉบบท 1 ประจ าเดอนมกราคม – มถนายน 2560 ฉบบน เปนปท 3 ของกลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน โดยมวตถประสงคมงเนนทจะเผยแพรองคความร ดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ใหนกวจย นกวชาการ นกศกษา ผประกอบการ และประชาชนทวไป ไดทราบ และสามารถเรยนร น าไปตอยอดความร และแกไขปญหาในการท างาน ดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมตได วารสารน มก าหนดตพมพทก 6 เดอน ปละ 2 ฉบบ ซงบทความทกบทความจะตองผานการพจารณาจากผทรงคณวฒอยางนอย 3 ทาน ทงจากภายในและภายนอก มหาวทยาลยขอนแกน ในฉบบน มบทความวจย จ านวน 7 บทความ ซงทานสามารถตดตาม และอานบทความตนฉบบไดทเวบไซต http://feat.kku.ac.th/
กลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต หวงเปนอยางยงวา วารสารเลมนจะเปนแหลงเรยนรดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ใหแกผสนใจทวไปได และขอขอบพระคณนกวจย ทไดสงบทความมาลงตพมพ หากมค าตชมหรอขอเสนอแนะใดเกยวกบวารสาร สามารถตดตอได โดยตรงทกลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน ผานเวบไซตขางตน หรอ Email : [email protected]
รศ.ดร.รชพล สนตวรากร บรรณาธการ
[email protected] 30 มถนายน 2560
FEAT Journal (Farm Engineering and Automation Technology Journal, Khon Kaen University)
วารสารFEAT วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
ปท 3 ฉบบท 1 เดอน มกราคม – มถนายน 2560 การออกแบบวฏจกรการขบขส าหรบรถจกรยานยนตในเขตเมองส าหรบประเมนคา 1 การปลดปลอยกาซไอเสยและการสนเปลองเชอเพลง อรรถพล สด ำ ธเนศ เสถยรนำม และ ธนำ รำษฎรภกด
การพฒนาระบบระบพกดต าแหนงบนพนโลกแบบจลนส าหรบการท าเกษตรแมนย า : 11 การตรวจสอบยนยนความถกตองของคาพกดต าแหนง คธำ วำทกจ
การพฒนากฎการควบคมพไอดส าหรบอปกรณขบเราแบบ เปด/ปด 19 วศวะ มะมำ และ ธนำ รำษฎรภกด
เสนทางทเหมาะสมของปลายแขนกลกรดยางพารา 25 ยงยทธ เสยงดง พยงศกด จลยเสน และ คงเดช พะสนำม
การหาคาควบคมทเหมาะสมส าหรบเครองสขาวขาวขนาดเลก โดยใชวธพนผวตอบสนอง 37 วรวร ปญญำค ำ ปรำโมทย พลคำมน สมเกยรต เตมสข และ ดสต สงหพรหมมำศ1
ผลกระทบของแผนกนกงหนทมผลตอประสทธภาพของกงหนพลงงานน าวนอสระ 45ปยะวฒน ศรธรรม พงศกร วเชยร ทรงศกด สวรรณศร และ รชพล สนตวรำกร
การประเมนการปลดปลอยมลพษจากการเผาไหมฟางขาวในทโลงแจง 53
กตตยำภรณ รองเมอง วรชย อำจหำญ พรรษำ ลบลบ และ ทพยสภนทร หนซย
______________________________________________________________________ FEAT Journal (Farm Engineering and Automation Technology Journal, Khon Kaen University)
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน
บทบรรณาธการ _________________________________________________________ เรยน ทานสมาชกวารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต และผอานทกทาน
วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต (Farm Engineering and Automation Technology Journal : FEAT Journal) ปท 3 ฉบบท 1 ประจ าเดอนมกราคม – มถนายน 2560 ฉบบน เปนปท 3 ของกลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน โดยมวตถประสงคมงเนนทจะเผยแพรองคความร ดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ใหนกวจย นกวชาการ นกศกษา ผประกอบการ และประชาชนทวไป ไดทราบ และสามารถเรยนร น าไปตอยอดความร และแกไขปญหาในการท างาน ดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมตได วารสารน มก าหนดตพมพทก 6 เดอน ปละ 2 ฉบบ ซงบทความทกบทความจะตองผานการพจารณาจากผทรงคณวฒอยางนอย 3 ทาน ทงจากภายในและภายนอก มหาวทยาลยขอนแกน ในฉบบน มบทความวจย จ านวน 7 บทความ ซงทานสามารถตดตาม และอานบทความตนฉบบไดทเวบไซต http://feat.kku.ac.th/
กลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต หวงเปนอยางยงวา วารสารเลมนจะเปนแหลงเรยนรดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ใหแกผสนใจทวไปได และขอขอบพระคณนกวจย ทไดสงบทความมาลงตพมพ หากมค าตชมหรอขอเสนอแนะใดเกยวกบวารสาร สามารถตดตอได โดยตรงทกลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน ผานเวบไซตขางตน หรอ Email : [email protected]
รศ.ดร.รชพล สนตวรากร บรรณาธการ
[email protected] 30 มถนายน 2560
FEAT Journal (Farm Engineering and Automation Technology Journal, Khon Kaen University)

FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL
Vol.3 No.1 January - June 2017
Design a driving cycle of a motorcycle in urban area: Assessing exhaust emissions 1 and fuel consumption Atthapol Seedam Thaned Satiennam and Thana radpukdee
Development of Real-Time Kinematic GPS System for Precision Agriculture : 11 Validation of Positioning Accuracy Khata Wathakit
Development of A Pid Control Law for An On/Off Actuator 19 Wisawa Mama and Thana Radpukdee
Appropriated Trajectory of End Effector for Para Rubber Tapping 25 Yongyuth Sengdang Payungsak Junyusen and Khongdet Phasinam
Optimal Variable for Home Use Rice Milling Machine by Respond Surface Method 37 Voravee Punyakum Pramote Palicamin Somkiat Thermsuk and
Dusit Singpommat
The Effects of Turbine Baffle Plates on the Efficiency of Water Free Vortex Hydro Turbine 45 Piyawat Sritram Pongsakorn Wichian Sogsak Suwansri and
Ratchaphon Suntivarakorn
Assessment of Pollutant Emission Emission from Open Field Burning of Rice Straw 53 Kittiyaporn Rongmuang Weerachai Arjharn Pansa Liplap and
Thipsuphin Hinsui ______________________________________________________________________ FEAT Journal (Farm Engineering and Automation Technology Journal, Khon Kaen University)
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน
บทบรรณาธการ _________________________________________________________ เรยน ทานสมาชกวารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต และผอานทกทาน
วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต (Farm Engineering and Automation Technology Journal : FEAT Journal) ปท 3 ฉบบท 1 ประจ าเดอนมกราคม – มถนายน 2560 ฉบบน เปนปท 3 ของกลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน โดยมวตถประสงคมงเนนทจะเผยแพรองคความร ดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ใหนกวจย นกวชาการ นกศกษา ผประกอบการ และประชาชนทวไป ไดทราบ และสามารถเรยนร น าไปตอยอดความร และแกไขปญหาในการท างาน ดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมตได วารสารน มก าหนดตพมพทก 6 เดอน ปละ 2 ฉบบ ซงบทความทกบทความจะตองผานการพจารณาจากผทรงคณวฒอยางนอย 3 ทาน ทงจากภายในและภายนอก มหาวทยาลยขอนแกน ในฉบบน มบทความวจย จ านวน 7 บทความ ซงทานสามารถตดตาม และอานบทความตนฉบบไดทเวบไซต http://feat.kku.ac.th/
กลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต หวงเปนอยางยงวา วารสารเลมนจะเปนแหลงเรยนรดานวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต ใหแกผสนใจทวไปได และขอขอบพระคณนกวจย ทไดสงบทความมาลงตพมพ หากมค าตชมหรอขอเสนอแนะใดเกยวกบวารสาร สามารถตดตอได โดยตรงทกลมวจยวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต มหาวทยาลยขอนแกน ผานเวบไซตขางตน หรอ Email : [email protected]
รศ.ดร.รชพล สนตวรากร บรรณาธการ
[email protected] 30 มถนายน 2560
FEAT Journal (Farm Engineering and Automation Technology Journal, Khon Kaen University)
_________________________________________________________________________________
____________________________________________________________________________________________________________________________________________ การออกแบบวฏจกรการขบขส าหรบรถจกรยานยนตในเขตเมองส าหรบประเมนคาการ
ปลดปลอยกาซไอเสยและการสนเปลองเชอเพลง Design a driving cycle of a motorcycle in urban area: Assessing exhaust emissions and
fuel consumption อรรถพล สด ำ* ธเนศ เสถยรนำม และ ธนำ รำษฎรภกด
Atthapol Seedam* Thaned Satiennam and Thana radpukdee ภำควชำวศวกรรมเครองกล คณะวศวกรรมศำสตร มหำวทยำลยขอนแกน 40002 ภำควชำวศวกรรมโยธำ คณะวศวกรรมศำสตร มหำวทยำลยขอนแกน 40002
ภำควชำวศวกรรมอตสำหกำร คณะวศวกรรมศำสตร มหำวทยำลยขอนแกน 40002 Mechanical Engineering Department, Engineering Faculty, Khon Kaen University, 40002
Civil Engineering Department, Engineering Faculty, Khon Kaen University, 40002 Industrial Engineering Department, Engineering Faculty, Khon Kaen University, 40002
Received: 1 พ.ย. 59 Accepted: 9 ก.พ.60
บทคดยอ
กำรศกษำกำรสรำงวฏจกรกำรขบขเพอประเมนคำกำรปลดปลอยมลภำวะและอตรำกำรสนเปลองเชอเพลงนน สำมำรถอธบำยไดถงลกษณะกำรขบขทสงผลกระทบตอกำรปลดปลอยปรมำณมลพษจำกไอเสยของรถจกรยำนยนตและอตรำกำรสนเปลองเชอเพลงได กำรออกแบบวฏจกรกำรขบขจ ำเปนตองอำศยอปกรณส ำหรบเกบขอมลควำมเรวตอเวลำเพอใชในกำรค ำนวณหำคำพำรำมเตอรเปำหมำยและกำรตดตงอปกรณตรวจวดปรมำณไอเสยเพมเตมเขำมำนนยงท ำใหสำมำรถอธบำยถงรปแบบกำรขบขทสงผลกระทบตอกำรปลดปลอยมลพษไดอยำงแมนย ำ โดยในกำรศกษำนจะท ำกำรเกบขอมลควำมเรวตอเวลำ ปรมำณไอเสยและอตรำสนเปลองเชอเพลง จำกกำรศกษำจะพบวำ วฏจกรกำรขบขส ำหรบรถจกรยำนยนตทสรำงขนสำมำรถเปนตวแทนรปแบบกำรขบขทมอตรำสนเปลองเชอเพลงและปลอยมลพษจำกไอเสยต ำ โดยจะมกำรปลอยมลพษโดยรวมมคำเทำกบ 171.05 กรมตอกโลเมตร และ มอตรำกำรสนเปลองเชอเพลงเทำกบ 20.687 กโลเมตรตอ
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
1
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
ลตร ซงวฏจกรกำรขบขดงกลำวมควำมเหมำะสมส ำหรบใชเปนแนวทำงส ำหรบกำรลดปรมำณกำรปลอยกำซไอเสยและอตรำกำรสนเปลองเชอเพลงส ำหรบรถจกรยำนยนต เนองจำกมปรมำณกำรปลอยไอเสยและกำรสนเปลองเชอเพลงต ำทสดและยงมพฤตกรรมกำรขบขทใกลเคยงกบกำรขบขในสภำวะจรงบนทองถนน โดยพจำรณำจำกคำเปอรเซนตควำมคลำดเคลอนของพำรำมเตอรวฏจกรทสรำงขนกบพำรำมเตอรเปำหมำย เทำกบ 2.363%
ค าส าคญ : วฏจกรกำรขบข อตรำกำรสนเปลองเชอเพลง คำกำรปลดปลอยมลพษ รถจกรยำนยนต
Abstract
A study generate driving cycle for an estimated a pollutant emissions and fuel consumption. The driving characteristics effect an exhaust emission and fuel consumption. Design a cycle driving required a collect data of speed-time used to calculate the target parameters and a measured the emissions. It also makes an accuracy to describe a driving behavior that result. The study collects data on speed-time and emissions and fuel consumption that generated a driving cycle of a motorcycle. It can be represented characteristic a driving of an economy fuel and low exhaust emissions, which the data find evaluation a total of exhaust emissions at 171.05 grams per kilometer and fuel consumption at 20.687 kilometer per liter. The driving cycle is reasonable for used to a guide for reducing emissions and fuel economy of a driving, because it obtains a behavior of driving a motorcycle. By a percentage of the target parameters of the driving cycle is 2.363%.
Keywords : Driving cycles Fuel consumption Rate Exhaust Emissions Motorcycles _________________________________________________________ *ตดตอ: อเมล : [email protected], โทรศพท: 082-578-319 1. บทน า
ปจจบนปญหำสภำวะโลกรอนเปนปญหำวกฤตของโลกซงเกดจำกกจกรรมตำงๆ ของมนษยโดยเฉพำะกำรคมนำคมขนสงซงเปนสวนหนงทปลอยกำซทกอใหเกดปรำกฏกำรณเรอนกระจก โดยประเมนจำกปรมำณกำรปลอยกำซไอเสยทปลอยออกจำกยำนพำหนะบนทองถนน โดยคำดงกลำวจะสำมำรถ
หำไดจำกตวแทนรปแบบกำรขบขทเรยกวำ วฏจกรกำรขบข โดยวฏจกรดงกลำวจะแสดงถงพฤตกรรมกำรขบ ขและสภำพจรำจรส ำหรบยำนพำหนะ อยำงไรกตำมวฏจกรกำรขบขนนจะมควำมแตกตำงกนในแตละเสนทำงทสนใจ ซงวฏจกรกำรขบขตำมมำตรฐำน ECE ท เปนทยอมรบกนนน อำจจะไมสำมำรถน ำมำใชได เมอกำรจรำจรทแทจรงนน
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
2
มควำมแตกตำงกนของรปแบบกำรจรำจร [1,2] และวฏจกรกำรขบขในแตละพนทจะมกำรปลอยกำซไอเสยและอตรำกำรสนเปลองเชอเพลงแตกตำงกนตำมสภำพกำรจรำจรทแตกตำงกน [3,4,5] ดงนนกำรออกแบบวฏจกรกำรขบขท เหมำะสมส ำหรบพนททมลกษณะของกำรจรำจรท เฉพำะนน จะสำมำรถประเมนปรมำณกำรปลอยไอเสยและอตรำกำรบรโภคเชอเพลงไดอยำงถกตอง โดยปจจบนกำรประเมนดงกลำวนนจะใชกำร
ทดสอบขบขจ ำลองสภำวะกำรเดนทำงบนทองถนนดวยวฏจกรกำรขบขมำตรฐำนทเปนทยอมรบของยำนพำหนะแตละชนดใหใกลเคยงกบกำรวงบนถนนใหมำกทสดเพอประเมนปรมำณมลพษทเกดขนไดใกลเคยงกบสภำวะใชงำนจรงมำกทสด แตเนองจำกรปแบบกำรขบขมำตรฐำนทประเทศไทยใชอยในปจจบนนน ใชวฏจกรกำรขบขของประเทศทำงยโรป คอ วฏจก ร Economic Commission for Europe (ECE) ซงในควำมเปนจรงแลว สภำพกำรจรำจรในประเทศไทยแตกตำงจำกประเทศในแถบยโรปมำก [6] ดงนนกำรศกษำกำรสรำงวฏจกรกำรขบขเปนสงจ ำเปนส ำหรบประเมนปรมำณกำรปลดปลอยมลพษและสภำพกำรจรำจรในแตละพนท เพอหำแนวทำงจดกำรหรอวำงนโยบำยพฒนำและปรบปรงกำรปลดปลอยมลพษและกำรสนเปลองเชอเพลงส ำหรบทเกดขนในสภำพกำรจรำจรทตดขดไดอยำงเหมำะสม จงหวดขอนแกนเปนจงหวดหนงซงถอวำเปน
จงหวดหนงทมปญหำในกำรจรำจรตดขดในชวโมงเรงดวนของวน และมกำรใชรถจกรยำนยนตจ ำนวนมำกส ำหรบกำรเดนทำง คดเปนรอยละ 30 ของจ ำนวนกำรใชรถจกรยำนยนตในประเทศ [7] จำกสภำพดงกลำวจะกอใหเกดปญหำกำรจรำจรตดขด
ในชวโมงเรงดวนของวนซงกำรจรำจรทตดขดนนจะสงผลใหเกดสภำวะมลพษอำกำศจำกกำรปลอยกำซไอเสยและเกดกำรสนเปลองเชอเพลงในบรเวณทเกดจรำจรตดขด ดงนนกำรศกษำนเพอสรำงวฏจกรกำรขบขของ
รถจกรยำนยนต ซงผลทไดจะท ำใหกำรประเมนปรมำณมลพษทปลดปลอยและกำรใชเชอเพลงมควำมถกตองมำกยงขนและจะเปนประโยชนอยำงมำกในกำรหำแนวทำงส ำหรบกำรควบคมระบบบรหำรกำรจรำจรผำนสญญำณจรำจรเพอลดมลพษและกำรสนเปลองเชอเพลงในพนทเกดปญหำนน ๆ
2. การเกบขอมลและสรางวฏจกรการขบข 2.1 การเลอกพนทและเสนทาง
สรำงวฏจกรกำรขบขจ ำ เปนตองใช ขอมลควำมเรวกบเวลำกำรขบขรถจกรยำนยนตไปบนเสนทำงทสนใจ โดยเสนทำงส ำหรบเกบขอมลจะแสดงในรปท 1 และ ตำรำงท 1 จะอธบำยถงปรมำณยำนพำหนะท เดนทำงในแตละเสนทำง โดยกำรพจำรณำเสนทำงจะก ำหนดจำกเสนทำงทมกำรเชอมตอไปยงเขตเทศบำลนครขอนแกน โดยรปแบบของกำรจรำจรจะหำไดจำกควำมเรวในกำรเดนทำงไปยงเสนทำงจำกขอมลกำรจรำจรของแตละเสนทำง โดยจะเลอกเสนทำงทมระยะเวลำในกำรเดนทำงสนทสดและมกำรเชอมตอไปยงเสนทำงอนไดหลำยเสนทำง ซงจำกขอมลกำรจดทะเบยนจะพบวำรถจกรยำนยนตในชวงขนำดเครองยนต 101 ถง 125 cc. มสดสวนมสดสวนกำรจดทะเบยนสงสดอยท 75.53% ของจ ำนวนรถจกรยำนยนตทมกำรจดท ะ เบ ย น ท ง ห ม ด ง ำ น ว จ ย น จ ง ไ ด เล อ กรถจกรยำนยนตทมขนำดเครองยนตอยในชวงระหวำง 101 ถง 125 cc. เพอเปนตวแทนในกำรเกบ
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
3
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
ขอมลควำมเรวของรถจกรยำนยนตในจงหวดขอนแกน โดยใชรถจกรยำนยนต โดยรำยละเอยดจะแสดงใน ตำรำงท 2
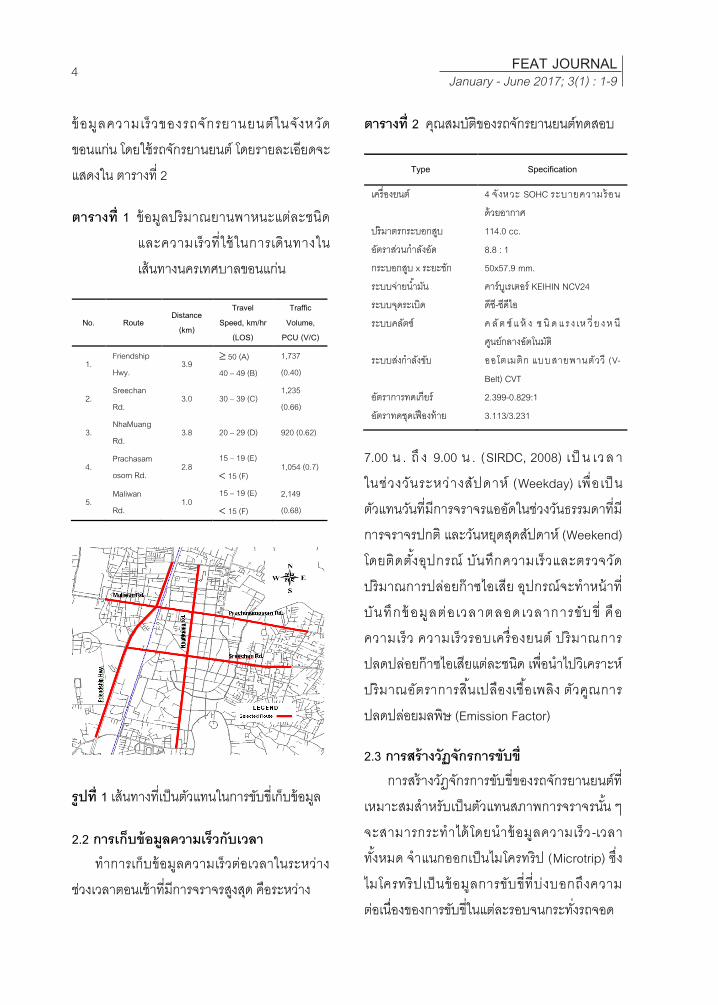
ตารางท 1 ขอมลปรมำณยำนพำหนะแตละชนดและควำมเรวทใชในกำรเดนทำงในเสนทำงนครเทศบำลขอนแกน
No. Route Distance
(km)
Travel Speed, km/hr
(LOS)
Traffic Volume,
PCU (V/C)
1. Friendship Hwy. 3.9 50 (A)
40 – 49 (B) 1,737 (0.40)
2. Sreechan Rd. 3.0 30 – 39 (C)
1,235 (0.66)
3. NhaMuang Rd.
3.8 20 – 29 (D) 920 (0.62)
4. Prachasamosorn Rd.
2.8 15 – 19 (E) 15 (F)
1,054 (0.7)
5. Maliwan Rd. 1.0
15 – 19 (E) 15 (F)
2,149 (0.68)
รปท 1 เสนทำงทเปนตวแทนในกำรขบขเกบขอมล 2.2 การเกบขอมลความเรวกบเวลา ท ำกำรเกบขอมลควำมเรวตอเวลำในระหวำงชวงเวลำตอนเชำทมกำรจรำจรสงสด คอระหวำง
ตารางท 2 คณสมบตของรถจกรยำนยนตทดสอบ
Type Specification
เครองยนต ปรมำตรกระบอกสบ อตรำสวนก ำลงอด กระบอกสบ x ระยะชก ระบบจำยน ำมน ระบบจดระเบด ระบบคลตช ระบบสงก ำลงขบ อตรำกำรทดเกยร อตรำทดชดเฟองทำย
4 จงหวะ SOHC ระบำยควำม รอนดวยอำกำศ 114.0 cc. 8.8 : 1 50x57.9 mm. คำรบเรเตอร KEIHIN NCV24 ดซ-ซดไอ ค ล ต ช แ ห ง ช น ด แ ร ง เห ว ย ง ห นศนยกลำงอตโนมต ออโตเมตก แบบสำยพำนตวว (V-Belt) CVT 2.399-0.829:1 3.113/3.231
7.00 น . ถ ง 9.00 น . (SIRDC, 2008) เ ป น เวล ำ ในชวงวนระหวำงสปดำห (Weekday) เพอ เปนตวแทนวนทมกำรจรำจรแออดในชวงวนธรรมดำทมกำรจรำจรปกต และวนหยดสดสปดำห (Weekend) โดยตดตงอปกรณ บนทกควำมเรวและตรวจวดปรมำณกำรปลอยกำซไอเสย อปกรณจะท ำหนำทบนทก ขอมลตอ เวลำตลอดเวลำกำรขบข ค อ ควำมเรว ควำมเรวรอบเครองยนต ปรมำณกำรปลดปลอยกำซไอเสยแตละชนด เพอน ำไปวเครำะหปรมำณอตรำกำรสนเปลองเชอเพลง ตวคณกำรปลดปลอยมลพษ (Emission Factor)
2.3 การสรางวฏจกรการขบข กำรสรำงวฏจกรกำรขบขของรถจกรยำนยนตทเหมำะสมส ำหรบเปนตวแทนสภำพกำรจรำจรนน ๆ จะสำมำรกระท ำไดโดยน ำขอมลควำมเรว -เวลำทงหมด จ ำแนกออกเปนไมโครทรป (Microtrip) ซงไมโครทรปเปนขอมลกำรขบขทบงบอกถงควำมตอเนองของกำรขบขในแตละรอบจนกระทงรถจอด
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
4
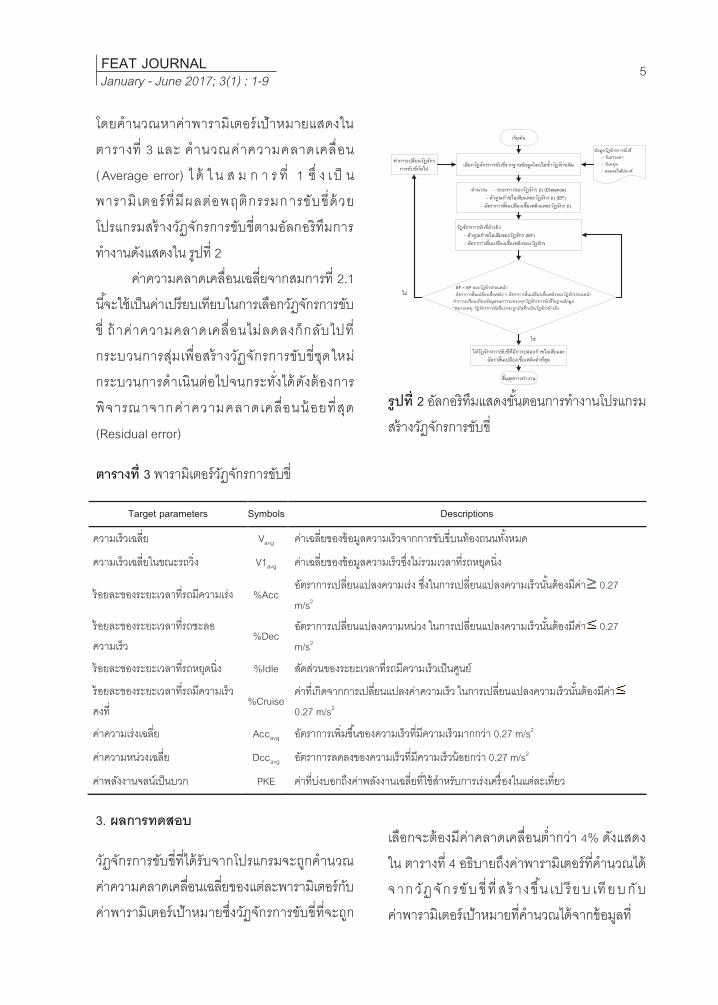
โดยค ำนวณหำคำพำรำมเตอรเปำหมำยแสดงใน ตำรำงท 3 และ ค ำนวณคำควำมคลำดเคลอน ( Average error) ไ ด ใ น ส ม ก ำ ร ท 1 ซ ง เ ป นพำรำม เตอรทมผลตอพฤตกรรมกำรขบข ดวยโปรแกรมสรำงวฏจกรกำรขบขตำมอลกอรทมกำรท ำงำนดงแสดงใน รปท 2 คำควำมคลำดเคลอนเฉลยจำกสมกำรท 2.1 นจะใชเปนคำเปรยบเทยบในกำรเลอกวฏจกรกำรขบข ถำคำควำมคลำดเคลอนไมลดลงกกลบไปทกระบวนกำรสมเพอสรำงวฏจกรกำรขบขชดใหม กระบวนกำรด ำเนนตอไปจนกระทงไดดงตองกำรพจำรณำจำกคำควำมคลำดเคลอนนอยทสด (Residual error)
ตารางท 3 พำรำมเตอรวฏจกรกำรขบข
3. ผลการทดสอบ
วฏจกรกำรขบขทไดรบจำกโปรแกรมจะถกค ำนวณคำควำมคลำดเคลอนเฉลยของแตละพำรำมเตอรกบคำพำรำมเตอรเปำหมำยซงวฏจกรกำรขบขทจะถก
- (i) (Distance)- (i) (EF)
- (i)
- - -
- EF < EF - < * :
- (EF)-
รปท 2 อลกอรทมแสดงขนตอนกำรท ำงำนโปรแกรมสรำงวฏจกรกำรขบข
เลอกจะตองมคำคลำดเคลอนต ำกวำ 4% ดงแสดงใน ตำรำงท 4 อธบำยถงคำพำรำมเตอรทค ำนวณไดจ ำก วฏ จ ก รขบ ข ท ส ร ำ งข น เป รยบ เท ย บ ก บคำพำรำมเตอรเปำหมำยทค ำนวณไดจำกขอมลท
Target parameters Symbols Descriptions
ควำมเรวเฉลย Vavg คำเฉลยของขอมลควำมเรวจำกกำรขบขบนทองถนนทงหมด ควำมเรวเฉลยในขณะรถวง V1avg คำเฉลยของขอมลควำมเรวซงไมรวมเวลำทรถหยดนง
รอยละของระยะเวลำทรถมควำมเรง %Acc อตรำกำรเปลยนแปลงควำมเรง ซงในกำรเปลยนแปลงควำมเรวนนตองมคำ 0.27 m/s2
รอยละของระยะเวลำทรถชะลอควำมเรว
%Dec อตรำกำรเปลยนแปลงควำมหนวง ในกำรเปลยนแปลงควำมเรวนนตองมคำ 0.27 m/s2
รอยละของระยะเวลำทรถหยดนง %Idle สดสวนของระยะเวลำทรถมควำมเรวเปนศนย รอยละของระยะเวลำทรถมควำมเรวคงท
%Cruise คำทเกดจำกกำรเปลยนแปลงคำควำมเรว ในกำรเปลยนแปลงควำมเรวนนตองมคำ 0.27 m/s2
คำควำมเรงเฉลย Accavg อตรำกำรเพมขนของควำมเรวทมควำมเรวมำกกวำ 0.27 m/s2 คำควำมหนวงเฉลย Dccavg อตรำกำรลดลงของควำมเรวทมควำมเรวนอยกวำ 0.27 m/s2 คำพลงงำนจลนเปนบวก PKE คำทบงบอกถงคำพลงงำนเฉลยทใชส ำหรบกำรเรงเครองในแตละเทยว
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
5
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
9
1iidE
(%) (1) เมอ
100)_(
)_()_(
arg
arg
ett
ettgeneratei iparameter
iparameteriparameterd
(%)
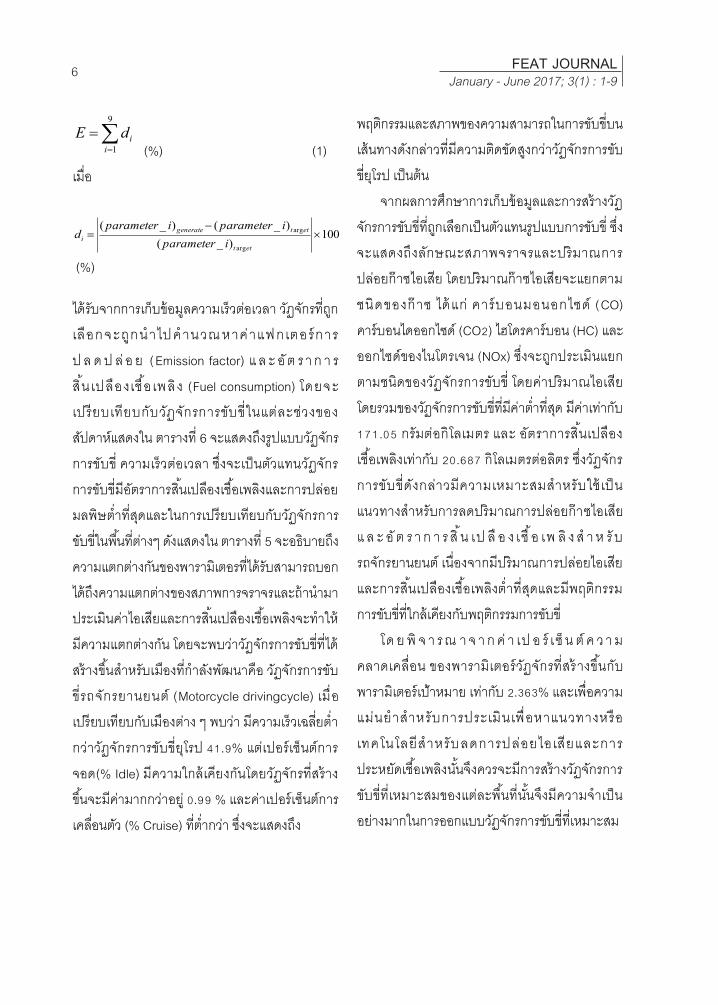
ไดรบจำกกำรเกบขอมลควำมเรวตอเวลำ วฏจกรทถกเลอกจะถกน ำ ไปค ำนวณหำค ำแฟกเตอ รกำรป ล ด ป ล อ ย (Emission factor) แ ล ะ อ ต ร ำ ก ำ รส น เปลองเช อ เพล ง (Fuel consumption) โดยจะเปรยบเทยบกบวฏจกรกำรขบขในแตละชวงของสปดำหแสดงใน ตำรำงท 6 จะแสดงถงรปแบบวฏจกรกำรขบข ควำมเรวตอเวลำ ซงจะเปนตวแทนวฏจกรกำรขบขมอตรำกำรสนเปลองเชอเพลงและกำรปลอยมลพษต ำทสดและในกำรเปรยบเทยบกบวฏจกรกำรขบขในพนทตำงๆ ดงแสดงใน ตำรำงท 5 จะอธบำยถงควำมแตกตำงกนของพำรำมเตอรทไดรบสำมำรถบอกไดถงควำมแตกตำงของสภำพกำรจรำจรและถำน ำมำประเมนคำไอเสยและกำรสนเปลองเชอเพลงจะท ำใหมควำมแตกตำงกน โดยจะพบวำวฏจกรกำรขบขทไดสรำงขนส ำหรบเมองทก ำลงพฒนำคอ วฏจกรกำรขบขรถจกรยำนยนต (Motorcycle drivingcycle) เมอเปรยบเทยบกบเมองตำง ๆ พบวำ มควำมเรวเฉลยต ำกวำวฏจกรกำรขบขยโรป 41.9% แตเปอรเซนตกำรจอด(% Idle) มควำมใกลเคยงกนโดยวฏจกรทสรำงขนจะมคำมำกกวำอย 0.99 % และคำเปอรเซนตกำรเคลอนตว (% Cruise) ทต ำกวำ ซงจะแสดงถง
พฤตกรรมและสภำพของควำมสำมำรถในกำรขบขบนเสนทำงดงกลำวทมควำมตดขดสงกวำวฏจกรกำรขบขยโรป เปนตน จำกผลกำรศกษำกำรเกบขอมลและกำรสรำงวฏจกรกำรขบขทถกเลอกเปนตวแทนรปแบบกำรขบข ซงจะแสดงถงลกษณะสภำพจรำจรและปรมำณกำรปลอยกำซไอเสย โดยปรมำณกำซไอเสยจะแยกตำมชนดของกำซ ไดแก คำรบอนมอนอกไซด (CO) คำรบอนไดออกไซด (CO2) ไฮโดรคำรบอน (HC) และ ออกไซดของไนโตรเจน (NOx) ซงจะถกประเมนแยกตำมชนดของวฏจกรกำรขบข โดยคำปรมำณไอเสยโดยรวมของวฏจกรกำรขบขทมคำต ำทสด มคำเทำกบ 171.05 กรมตอกโลเมตร และ อตรำกำรสนเปลองเชอเพลงเทำกบ 20.687 กโลเมตรตอลตร ซงวฏจกรกำรขบขดงกลำวมควำมเหมำะสมส ำหรบใชเปนแนวทำงส ำหรบกำรลดปรมำณกำรปลอยกำซไอเสยแ ล ะ อ ต ร ำ ก ำ รส น เป ล อ ง เ ช อ เพ ล ง ส ำ ห ร บรถจกรยำนยนต เนองจำกมปรมำณกำรปลอยไอเสยและกำรสนเปลองเชอเพลงต ำทสดและมพฤตกรรมกำรขบขทใกลเคยงกบพฤตกรรมกำรขบข โด ย พ จ ำ รณ ำ จ ำ ก ค ำ เป อ ร เซ น ต ค ว ำ มคลำดเคลอน ของพำรำมเตอรวฏจกรทสรำงขนกบพำรำมเตอรเปำหมำย เทำกบ 2.363% และเพอควำมแมนย ำส ำหรบกำรประเมนเพ อหำแนวทำงหรอเทคโนโลยส ำห รบลดกำรปลอยไอเสยและกำรประหยดเชอเพลงนนจงควรจะมกำรสรำงวฏจกรกำรขบขทเหมำะสมของแตละพนทนนจงมควำมจ ำเปนอยำงมำกในกำรออกแบบวฏจกรกำรขบขทเหมำะสม
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
6
ตารางท 4 คำควำมคลำดเคลอนเฉลยของวฏจกรกำร ขบขทสรำงขน
Parameter Target
parameter Driving
parameter Average error (%)
Vavg (km/h) 24.091 23.540 2.29 V1avg (km/h) 31.457 31.020 1.39 Accavg (m/s2) 0.608 0.609 0.19 Decavg (m/s2) 0.663 0.655 1.25 Idle (%) 22.520 23.936 6.29 Cruise (%) 19.623 19.504 0.61 Acc (%) 30.187 28.546 5.43 Dec (%) 27.671 28.014 1.24 PKE (m/s2) 0.402 0.392 2.58 Average Error (%) - - 2.363
ตารางท 5 เปรยบเทยบคำพำรำมเตอร
ตารางท 6 คำควำมคลำดเคลอนเฉลยของวฏจกรกำร ขบขทสรำงขน
Parameter Unit Weekday Weekend Combine
Duration (s) 1104 1120 1128 Distance (km) 7.142 7.330 7.380 Speed average (km/hr) 23.290 23.562 23.540
CO (g/s) 0.0948 0.1133 0.0926 (g/km) 14.652 17.313 14.145
CO2 (g/s) 1.0603 1.0433 1.0206 (g/km) 163.90 159.40 155.99
HC (g/s) 0.0054 0.0048 0.0037 (g/km) 0.8414 0.7359 0.5676
NOX (g/s) 0.0034 0.0029 0.0023 (g/km) 0.5269 0.4474 0.3569
Total Emission
(g/km) 179.92 177.89 171.05
FC (km/L) 19.640 19.709 20.687 (l/100 km) 5.091 5.073 4.833
*หมายเหต: FC คอ กำรสนเปลองเชอเพลง
4. อภปรายผล จำกผลกำรศกษำจะพบวำวฏจกรทสรำงขนจำกกำรเกบขอมลควำมเรวตอเวลำและกำรตดตงอปกรณตรวจวดกำซไอเสยและอตรำกำรสนเปลองเชอเพลงนน สำมำรถน ำมำค ำนวณในโปรแกรมสรำงวฏจกรกำรขบขทไดพฒนำขนนน ซงวฏจกรกำรขบขทสรำงขนทง 3 วฏจกรนน จะแสดงถงพฤตกรรมกำรจรำจรบนทองถนนทเปนพนทสนใจในแตละชวงไดเปนอยำงด โดยลกษณะพฤตกรรมดงกลำวจะม
Parameter Motorcycle drivingcycl
e
Khonkean drivingcycle
[8]
Bangkok drivingcycle
[10]
ECE driving
cycle [10]
Taiwai drivingcycle
[9]
Vavg, km/h 23.540 24.968 (6.07%)
10.74 (-119.18%)
33.4 (41.9%)
16.62 (-29.4%)
V1avg, km/h 31.020 31.842 (2.65%)
24.21 (-28.12%)
44.4 (43.1%)
23.66 (-23.7%)
Accavg, m/s2 0.609
0.636 (4.43%)
0.93 (34.51%)
0.541 (-11.2%)
0.68 (11.7%)
Decavg, m/s2 0.655
0.692 (5.65%)
0.97 (32.47%)
0.789 (20.5%) 0.68 (3.8%)
%Idle 23.936 20.799 (-13.10%)
54.98 (56.46%)
23.7 (-0.99%)
30 (25.3%)
%Cruise 19.504 17.828 (-8.59%)
12.81 (-52.25%)
42.2 (116.4%)
22 (12.8%)
%Acc. 28.546 31.971 (11.99%)
14.51 (-96.73%)
18.3 (-35.9%)
24 (-15.9%)
%Dec. 28.014 29.401 (4.95%)
18.06 (-55.11%)
15.8 (-43.6%)
24 (-14.3%)
PKE, m/s2 0.392 0.448 (14.29%) - 0.224 (-
42.7%) -
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
7
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
ควำมแตกตำงกน ดงแสดงในผลกำรทดสอบและวฏจกรกำรขบขทเปนตวแทนทถกเลอกจะเปนวฏจกรทมคำแฟกเตอรกำรปลดปลอยโดยรวมและอตรำกำรสน เปลองเช อ เพลงต ำท สดนน จะอธบำยไดถ งควำมสำมำรถในกำรขบขในกำรเดนทำงทจะเกดกำรประหยดเชอเพลงและปลดปลอยกำซไอเสยต ำทสด ในสวนกำรน ำไปใชประโยชนนน สำมำรถน ำไปใชประยกตส ำหรบออกแบบตวควบคมกำรท ำงำนของเครองยนต กำรออกแบบระบบควบคมสญญำณไฟจรำจร และ ก ำหนดมำตรกำรในกำรตรวจวดปรมำณกำรปลอยมลพษทเหมำะสม เปนตน
5. กตตกรรมประกาศ
ผ แตงขอขอบคณ กลมวจยวศวกรรมฟำรมและเทคโนโลยกำรควบคมอตโนมตมหำวทยำลยขอนแกน (FEAT) และ สมำคมวจยวทยำกำรขนสงแหงเอเชย (ATRANS) ส ำหรบทนสนบสนนกำรวจยและบณฑตวทยำลย มหำวทยำลยขอนแกน ส ำหรบทนอดหนนกำรวจย
6. เอกสารอางอง
[1] Chiang HL, Huang PH, Lai YM, Lee TY. Comparison of the regulated air pollutant emission characteristics of real-world driving cycle and ECE cycle for motorcycles. Atmospheric Environment. 2014; 87 : 1 - 9.
[2] Khon Kaen Municipality and SIRDC. “A Master Plan of Khon Kaen Transit
System” Khon Kaen Municipality and SustainableInfrastructure Research and Development Center. Khon Kaen University: Khon Kaen; 2008.
[3] Khumla P, Radpukdee T, Satiennam T. Driving Cycle Generation for Emissions and Fuel Consumption Assessment of the Motorcycles in Khon Kaen City. The First TSME International Conference on Mechanical Engineering; 2010 Oct 20-22; 2010; Ubon Ratchathani; 2010.
[4] Kumar R, Durai BK, Saleh W, Boswell C. Comparison and evaluation of emissions for different driving cycles of motorcycles: A note. Transportation Research Part D: Transport and Enviroment. 2011; 16, 61–64.
[5] PCD. Guidelines on the laws and standards on pollution control in Thailand. Pollution Control Deparment: Bangkok; 1995.
[6] Tamsanya S, Chungpaibulpatana S. Development of A Driving Cycle For The measurement of fuel consumption and exhaust emission of automobiles in Bangkok. During Peak Periods Inter national Jounal of Autamotive Technology. 2009; 10(2): 251-264.
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
8
[7] Tamsanya S, Chunpaipulpatana S. Study on the Influence of Bangkok Driving Characteristics on Exhaust Emissions and Fuel Consumption of Gasoline Passenger Car. The Joint International Conference on “Sustainable Energy and Environment (SEE)”, 2004 Dec 1-3, Hua Hin, Thailand; 2004.
[8] Tong HY, Hung WT, Cheung CS. Development of A Driving Cycle for Hong Kong. Atmospheric Environment. 1999 ; 33, 2323-2335.
[9] Tsaia JH, Chiangb HL, Hsuc YC, Penga BJ, Hungd RF. Development of a local real world drivingcycle for motorcycles for emission factor measurements. Atmospheric Environment. 2005; 39, 6631–6641.
[10] Wang Q, Huo H, He K, Yao Z, Zhang Q. Characterization of vehicle driving patterns and development of driving cycles in Chinese cities. Transportation Research Part D: Transport and Enviroment. 2008; 13, 289–297.
FEAT JOURNALJanuary - June 2017; 3(1) : 1-9
9

______________________________________________________________________________
______________________________________________________________________________ การพฒนาระบบระบพกดต าแหนงบนพนโลกแบบจลนส าหรบการท าเกษตรแมนย า :
การตรวจสอบยนยนความถกตองของคาพกดต าแหนง Development of Real-Time Kinematic GPS System for Precision Agriculture :
Validation of Positioning Accuracy คธา วาทกจ
Khata Wathakit สาขาวชาวศวกรรมเกษตรและอาหาร ส านกวชาวศวกรรมศาสตร มหาวทยาลยเทคโนโลยสรนาร จ.นครราชสมา
School of Agricultural and Food Engineering, Institute of Engineering Suranaree University of Technology, Nakhon Ratchasima
Received: 1 พ.ย. 59 Accepted: 9 ก.พ. 60
บทคดยอ
งานวจยนมวตถประสงคเพอตรวจสอบยนยนความถกตองของคาพกดต าแหนงจากระบบระบพกดต าแหนงแบบจลนทไดพฒนาขน อปกรณในระบบประกอบดวยชดสถานฐานเพอใชส าหรบสงคาขอมลพกดต าแหนงทปรบแกแลวไปยงชดเครองรบผานเครอขายอนเทอรเนตจากสญญาณโทรศพทเคลอนทดวยการสอสารแบบ TCP/IP ในการทดสอบไดก าหนดคาพกดต าแหนงอางองและจดทตองการรงวดคาพกด เพอเกบบนทกคาพกดต าแหนงอางองในระบบพกดกรด แนวทศเหนอ-ตะวนออก ผลการทดสอบแสดงใหเหนวาเมอเปรยบเทยบคาพกดต าแหนงของจดทรงวดกบคาพกดทไดจากการส ารวจดวยกลองสถานรวมจะใหคาผลตางในทศเหนอ-ตะวนออกมคาเฉลยเทากบ10.89 ซม. และ 12.69 ซม. ตามล าดบ
ค าส าคญ : ระบบการระบพกดต าแหนงบนพนลกดวยวธจลน เกษตรแมนย า
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
11FEAT JOURNALJanuary - June 2017; 3(1) : 11-17

Abstract
The objective of this research was to validate the accuracy of position acquired from a real-time kinematic (RTK) GPS system. The systems consist of a RTK GPS base station which sent the correction signal to a rover GPS station through the Internet network via TCP/IP from mobile phone signal. The position of the base station in the North – East grid reference system was set while the corrected positions of the rover station were recorded. The test results showed that the positions of the rover station acquired from RTK GPS system compared to the highly precise and accurate position which was measured from a total station gave the differences in position about 10.89 and 12.69 cm. in the North and East direction respectively. Keywords : Real-Time Kinamatic GPS; Precision Agriculture __________________________________________________________________________ *ตดตอ: อเมล : [email protected], โทรศพท: 0-4422-4225, โทรสาร: 0-4422-4610
1. บทน า
การท าการเกษตรในยคปจจบนไดมการพฒนาไปอยางรวดเรวตามกระแสการเปลยนแปลงของเท ค โน โล ย ก า รท า เก ษ ต รแม น ย า (Precision Agriculture) นบเปนอกแนวความคดหนงท ได รบความสนใจมากขนในประเทศไทย การท าเกษตรแบบแมนย าเปนการน ากลยทธการท าเกษตรทยดหลก “ควบคมการใชปจจยการผลตใหถกสถานทและถกเวลา” โดยอาศยเทคโนโลยและการบรหารจดการเขามาประยกตใช เพอใหการเพาะปลกหรอการท าการเกษตรมประสทธภาพดยงขน ชวยเพมปรมาณและคณภาพผลผลต ตลอดจนชวยลดผลกระทบตอสงแวดลอม หลกของเกษตรแมนย ามแนวคดทวาพชพนธทปลกและสภาพแวดลอม(ดน น า แสง อากาศ) มความแตกตางกนไปในแตละพนท สภาพแวดลอมรอบทแตกตางกนน เองสงผลใหผลผลตทไดมความแตกตางกน ดงนนการปรบวธการดแลใหเหมาะสมกบแตละสภาพพนททแตกตางกนจะท าใหไดรบผลผลต
รวมไปถงการใชทรพยากรในการผลตไดอยางมประสทธภาพสงสด เกษตรแมนย าจงใหความส าคญกบขอมลของสภาพแวดลอมในแตละพนทยอย ๆ สงผลใหการระบพกดต าแหนงทางภมศาสตรส าหรบใช ในก ารอ า ง อ ง ข อม ลจ งม ค วาม ส าคญ เป น อยางยง
ดวยความกาวหนาของเทคโนโลยในปจจบนท าใหการระบพกดต าแหนงทางภมศาสตรสามารถท าไดโดยอาศยสญญาณจากดาวเทยมทโคจรอยรอบโลก ระบบการระบพกดต าแหนงบนพ นโลก (Global Positioning System, GPS) จ งนบ เปนเค รองมอทส าคญอยางหนงในการท าเกษตรแมนย า อยางไรกตามการระบพกดต าแหนงในการท าเกษตรแมนย านนตองการความละเอยดถกตองของพกดต าแหนงคอนขางสงเนองจากบางครงอาจตองน าขอมลพกดต าแหนงดงกลาวไปใชงานรวมกบระบบควบคมอตโนมต อาท เชน ระบบบงคบเลยวของรถแทรกเตอร หรอการควบคมการท างานของเครองจกรกลเกษตรให
12 FEAT JOURNALJanuary - June 2017; 3(1) : 11-17

สมพนธกบคาพกดต าแหนง เปนตน วธการในการระบพกดต าแหนงดวยจพ เอสใหไดคาพกดทแมนย าสามารถกระท าไดหลายว ธ ระบบการระบพกดต า แ ห น งบ นพ น โล ก ด วย ว ธ จ ล น (Real-Time Kinematic, RTK GPS) ไดรบการยอมรบวามความถกตองและแมนย ามากทสดวธการหนง [5] อยางไรกตามถงแมวาระบบดงกลาวจะมความละเอยดแมนย าแตอปกรณในระบบฯ แบบส าเรจรปทมใชงานอยในเช งพ า ณ ช ย น น น บ ว า ย งม ราค าค อ น ข า งส ง นอกจากนน การใชงานระบบระบพกดต าแหนงบนพนโลกดวยวธจลนโดยปกตจะตองอาศยสถานฐาน (Base Station) ซ ง ม พ ก ด อ า ง อ งต า แห น ง ท า งภมศาสตรทถกตองท าหนาทใหบรการสงขอมลคาพกดปรบแกแบบสมบรณไปยงชดเครองรบสญญาณ (Rover) โดยผานเครอขายคลนวทย หรอเครอขายอนเทอรเนต ซงในประเทศไทยมสถานฐานใหบรการลกษณะน จ ากด เฉพาะหนวยงานราชการและครอบคลมในบางพนทเทานนจงสงผลใหยงไมมการน าระบพกดต าแหนงบนพ น โลกดวยว ธจลน ไปประยกตใชงานทวไปอยางแพรหลายเทาทควร [3] และนบเปนขอจ ากดอยางหนงในการพฒนาการท าเกษตรแมนย าในประเทศไทย
ปจจบนไดมการพฒนาแผงวงจรรบสญญาณ RTK GPS ขนเฉพาะเพอจ าหนายในเชงพาณชย แผงวงจรรบสญญาณดงกลาวมลกษณะเปน System on Chip (SoC) ท ไ ด ร ว ม เอ า ห น ว ย ป ระ ม ว ล ผ ล ก ล า ง หนวยความจ า ตวก าเนดสญญาณนาฬกา หนวยควบคมการเชอมตอกบอปกรณภายนอกรวมไปถง
ชดค าสงส าหรบปรบแกคาพกดไวในแผงวงจรเพยงชดเด ย วส งผล ให อป ก รณ ด งกล า วม ราค าถกล งคอนขางมาก เพอเปนการพฒนาระบบการท าเกษตรแมนย าในประเทศไทยใหแพรหลายมากยงขน แนวคดของการวจยนจงมวตถประสงคหลกทจะพฒนาระบบระบพ กดต าแหน งบนพ น โลกแบบจลนส าห รบประยกตใชในการท าเกษตรแมนย า โดยในเบองตนจะท าการตรวจสอบและยนยนความถกตองของคาพกดต าแหนงของชดเครองรบสญญาณจากแผงวงจรรบสญญาณ RTK GPS ส าหรบใชเปนขอมลอางองเพอทจะพฒนาระบบฯ ใหสามารถใชงานรวมกบอปกรณอนๆ ในการท าเกษตรแมนย าไดตอไป
2. วธการวจย
อปกรณในระบบประกอบดวยชดสถานฐานและชดเครองรบสญญาณพกดต าแหนง ภายในมบอรดส าหรบเชอมตอวงจรตนแบบซงประกอบดวยอปกรณอเลกทรอนกสตางๆ ไดแก แผงวงจรรบสญญาณ RTK
รปท 1 แผงวงจรรบสญญาณ RTK GPS
13FEAT JOURNALJanuary - June 2017; 3(1) : 11-17
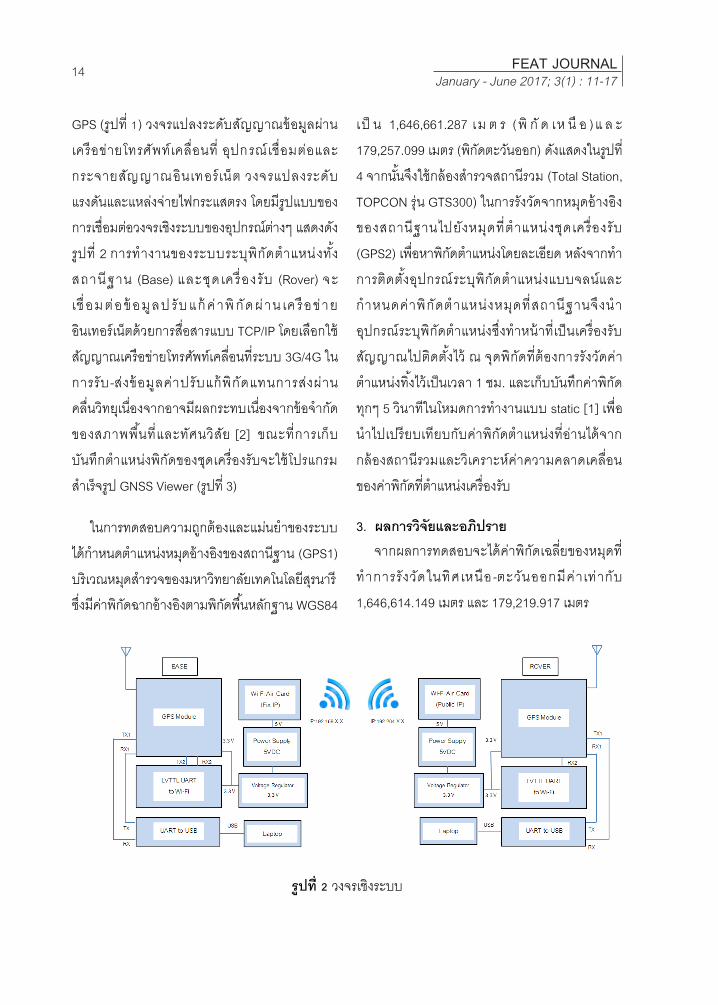
GPS (รปท 1) วงจรแปลงระดบสญญาณขอมลผานเครอขายโทรศพทเคลอนท อปกรณเชอมตอและกระจายสญญาณอนเทอรเนต วงจรแปลงระดบแรงดนและแหลงจายไฟกระแสตรง โดยมรปแบบของการเชอมตอวงจรเชงระบบของอปกรณตางๆ แสดงดงรปท 2 การท างานของระบบระบพกดต าแหนงทงสถานฐาน (Base) และชด เค รอง รบ (Rover) จะเช อมต อ ขอมลป รบแ กค าพ กด ผ าน เค รอข ายอนเทอรเนตดวยการสอสารแบบ TCP/IP โดยเลอกใชสญญาณเครอขายโทรศพทเคลอนทระบบ 3G/4G ในการรบ -สงขอมลคาปรบแกพกดแทนการสงผานคลนวทยเนองจากอาจมผลกระทบเนองจากขอจ ากดของสภาพพนทและทศนวสย [2] ขณะทการเกบบนทกต าแหนงพกดของชดเครองรบจะใชโปรแกรมส าเรจรป GNSS Viewer (รปท 3)
ในการทดสอบความถกตองและแมนย าของระบบไดก าหนดต าแหนงหมดอางองของสถานฐาน (GPS1) บรเวณหมดส ารวจของมหาวทยาลยเทคโนโลยสรนาร ซงมคาพกดฉากอางองตามพกดพนหลกฐาน WGS84
เ ป น 1,646,661.287 เม ต ร (พ ก ด เห น อ )แ ล ะ 179,257.099 เมตร (พกดตะวนออก) ดงแสดงในรปท 4 จากนนจงใชกลองส ารวจสถานรวม (Total Station, TOPCON รน GTS300) ในการรงวดจากหมดอางองของสถานฐานไปยงหมดทต าแหนงชดเค รองรบ (GPS2) เพอหาพกดต าแหนงโดยละเอยด หลงจากท าการตดตงอปกรณระบพกดต าแหนงแบบจลนและก าหนดคาพกดต าแหนงหมดทสถานฐานจงน าอปกรณระบพกดต าแหนงซงท าหนาทเปนเครองรบสญญาณไปตดตงไว ณ จดพกดทตองการรงวดคาต าแหนงทงไวเปนเวลา 1 ชม. และเกบบนทกคาพกดทกๆ 5 วนาทในโหมดการท างานแบบ static [1] เพอน าไปเปรยบเทยบกบคาพกดต าแหนงทอานไดจากกลองสถานรวมและวเคราะหคาความคลาดเคลอนของคาพกดทต าแหนงเครองรบ
3. ผลการวจยและอภปราย จากผลการทดสอบจะไดคาพกดเฉลยของหมดท
ท าการรงวดในทศ เหนอ -ตะวนออกมคาเทากบ 1,646,614.149 เมตร และ 179,219.917 เมตร
รปท 2 วงจรเชงระบบ
14 FEAT JOURNALJanuary - June 2017; 3(1) : 11-17
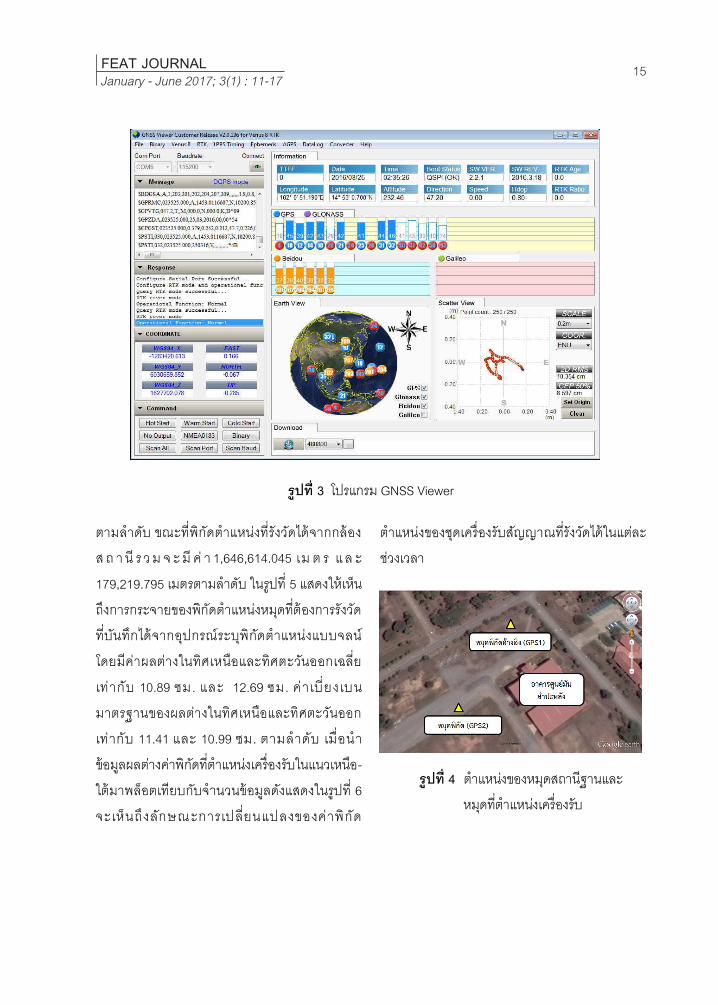
รปท 3 โปรแกรม GNSS Viewer
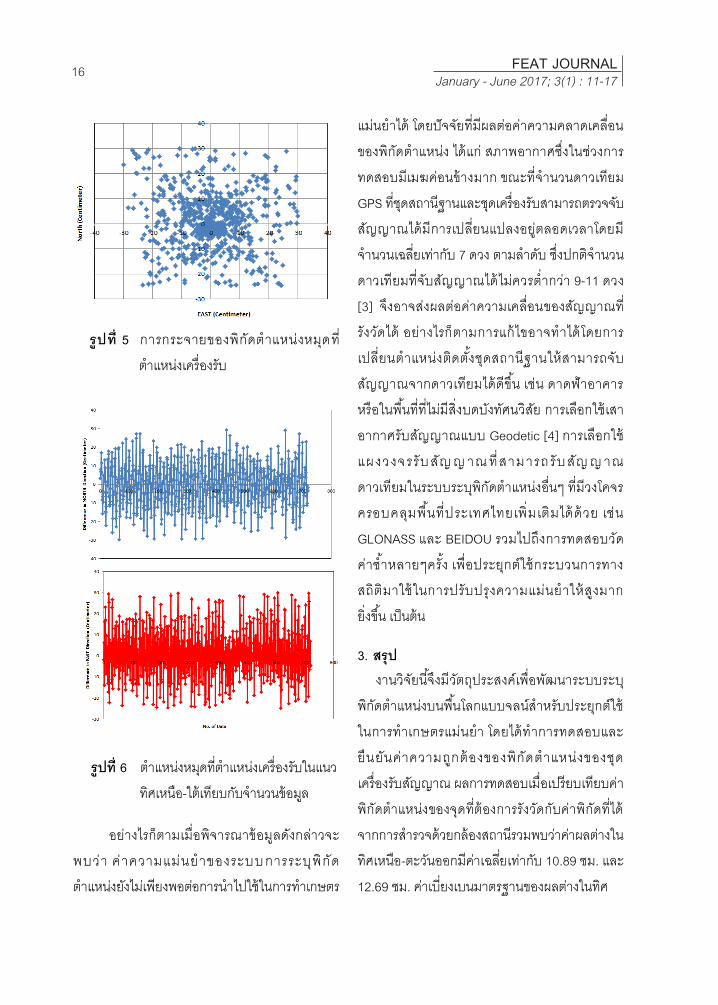
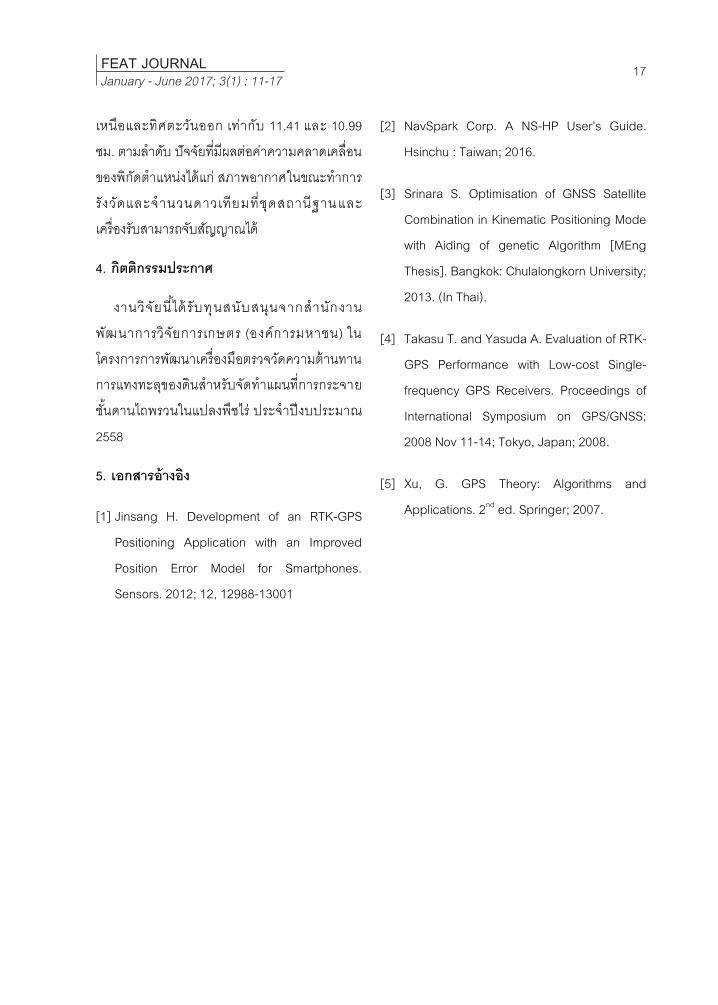
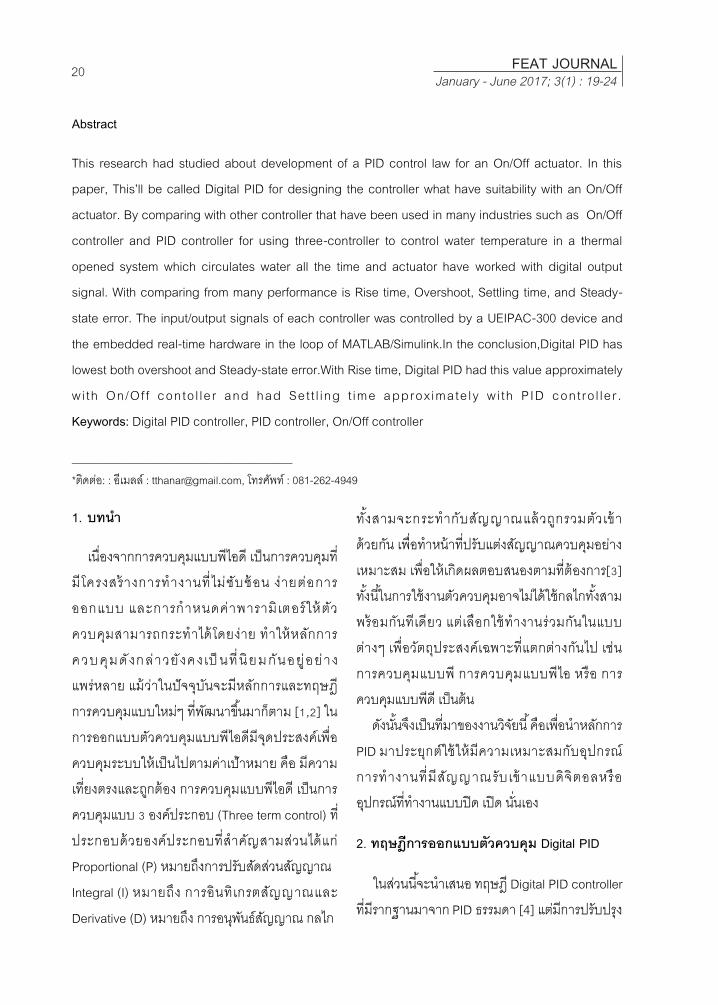
ตามล าดบ ขณะทพกดต าแหนงทรงวดไดจากกลองส ถ า น ร ว ม จ ะ ม ค า 1,646,614.045 เม ต ร แ ล ะ 179,219.795 เมตรตามล าดบ ในรปท 5 แสดงใหเหนถงการกระจายของพกดต าแหนงหมดทตองการรงวดทบนทกไดจากอปกรณระบพกดต าแหนงแบบจลน โดยมคาผลตางในทศเหนอและทศตะวนออกเฉลยเทากบ 10.89 ซม. และ 12.69 ซม. คาเบยงเบนมาตรฐานของผลตางในทศเหนอและทศตะวนออก เทากบ 11.41 และ 10.99 ซม. ตามล าดบ เมอน าขอมลผลตางคาพกดทต าแหนงเครองรบในแนวเหนอ-ใตมาพลอตเทยบกบจ านวนขอมลดงแสดงในรปท 6 จะเหนถงลกษณะการเปลยนแปลงของคาพกด
ต าแหนงของชดเครองรบสญญาณทรงวดไดในแตละชวงเวลา
รปท 4 ต าแหนงของหมดสถานฐานและ
หมดทต าแหนงเครองรบ
15FEAT JOURNALJanuary - June 2017; 3(1) : 11-17
รปท 5 การกระจายของพกดต าแหนงหมดท
ต าแหนงเครองรบ
รปท 6 ต าแหนงหมดทต าแหนงเครองรบในแนว
ทศเหนอ-ใตเทยบกบจ านวนขอมล
อยางไรกตามเมอพจารณาขอมลดงกลาวจะพบวา คาความแมนย าของระบบการระบ พกดต าแหนงยงไมเพยงพอตอการน าไปใชในการท าเกษตร
แมนย าได โดยปจจยทมผลตอคาความคลาดเคลอนของพกดต าแหนง ไดแก สภาพอากาศซงในชวงการทดสอบมเมฆคอนขางมาก ขณะทจ านวนดาวเทยม GPS ทชดสถานฐานและชดเครองรบสามารถตรวจจบสญญาณไดมการเปลยนแปลงอยตลอดเวลาโดยมจ านวนเฉลยเทากบ 7 ดวง ตามล าดบ ซงปกตจ านวนดาวเทยมทจบสญญาณไดไมควรต ากวา 9-11 ดวง [3] จงอาจสงผลตอคาความเคลอนของสญญาณทรงวดได อยางไรกตามการแกไขอาจท าไดโดยการเปลยนต าแหนงตดตงชดสถานฐานใหสามารถจบสญญาณจากดาวเทยมไดดขน เชน ดาดฟาอาคารหรอในพนททไมมสงบดบงทศนวสย การเลอกใชเสาอากาศรบสญญาณแบบ Geodetic [4] การเลอกใชแผงวงจรรบสญญ าณท สามารถ รบสญญ าณดาวเทยมในระบบระบพกดต าแหนงอนๆ ทมวงโคจรครอบคลมพ นทประเทศไทยเพมเตมไดดวย เชน GLONASS และ BEIDOU รวมไปถงการทดสอบวดคาซ าหลายๆครง เพอประยกตใชกระบวนการทางสถตมาใชในการปรบปรงความแมนย าใหสงมากยงขน เปนตน
3. สรป งานวจยนจงมวตถประสงคเพอพฒนาระบบระบ
พกดต าแหนงบนพนโลกแบบจลนส าหรบประยกตใชในการท าเกษตรแมนย า โดยไดท าการทดสอบและยนยนคาความถกตองของพกดต าแหนงของชดเครองรบสญญาณ ผลการทดสอบเมอเปรยบเทยบคาพกดต าแหนงของจดทตองการรงวดกบคาพกดทไดจากการส ารวจดวยกลองสถานรวมพบวาคาผลตางในทศเหนอ-ตะวนออกมคาเฉลยเทากบ 10.89 ซม. และ 12.69 ซม. คาเบยงเบนมาตรฐานของผลตางในทศ
16 FEAT JOURNALJanuary - June 2017; 3(1) : 11-17
เหนอและทศตะวนออก เทากบ 11.41 และ 10.99 ซม. ตามล าดบ ปจจยทมผลตอคาความคลาดเคลอนของพกดต าแหนงไดแก สภาพอากาศในขณะท าการรงวดและจ านวนดาวเทยมท ชดสถานฐานและเครองรบสามารถจบสญญาณได
4. กตตกรรมประกาศ
งานวจยน ได รบทนสนบสนนจากส านกงานพฒนาการวจยการเกษตร (องคการมหาชน) ในโครงการการพฒนาเครองมอตรวจวดความตานทานการแทงทะลของดนส าหรบจดท าแผนทการกระจายชนดานไถพรวนในแปลงพชไร ประจ าปงบประมาณ 2558
5. เอกสารอางอง
[1] Jinsang H. Development of an RTK-GPS Positioning Application with an Improved Position Error Model for Smartphones. Sensors. 2012; 12, 12988-13001
[2] NavSpark Corp. A NS-HP User’s Guide. Hsinchu : Taiwan; 2016.
[3] Srinara S. Optimisation of GNSS Satellite Combination in Kinematic Positioning Mode with Aiding of genetic Algorithm [MEng Thesis]. Bangkok: Chulalongkorn University; 2013. (In Thai).
[4] Takasu T. and Yasuda A. Evaluation of RTK-GPS Performance with Low-cost Single-frequency GPS Receivers. Proceedings of International Symposium on GPS/GNSS; 2008 Nov 11-14; Tokyo, Japan; 2008.
[5] Xu, G. GPS Theory: Algorithms and Applications. 2nd ed. Springer; 2007.
17FEAT JOURNALJanuary - June 2017; 3(1) : 11-17


_________________________________________________________________________________
____________________________________________________________________________________________________________________________________________
การพฒนากฎการควบคมพไอดส าหรบอปกรณขบเราแบบ เปด/ปด Development of A Pid Control Law for An On/Off Actuator
วศวะ มะมา และ ธนา ราษฎรภกด* Wisawa Mama and Thana Radpukdee*
ภาควชาวศวกรรมอตสาหการ คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน 40002 Industrial Engineering Department, Engineering Faculty, Khon Kaen University, 40002
Received: 1 พ.ย. 59 Accepted: 9 ก.พ. 60
บทคดยอ
บทความวจยนไดศกษาเกยวกบการพฒนากฎการควบคมพไอดส าหรบอปกรณขบเราแบบ เปด/ปด โดยผวจยขอเรยกวาตวควบคมแบบ Digital PID เพอออกแบบตวควบคมทมความเหมาะสมกบอปกรณทมการขบเราแบบ เปด/ปด โดยการน าน ามาเปรยบเทยบกบตวควบคมทมการใชกนอยางแพรหลายในอตสาหกรรมตางๆ คอ On/Off และ PID โดยการน าตวควบคมทง 3 ไปควบคมอณหภมน าในระบบทางความรอนแบบเปดทมการไหลเวยนของน าอยตลอดเวลา และอปกรณการท างานมสญญาณ เอาทพตเปนแบบ ดจตอล แลวเปรยบเทยบจากคา ชวงเวลาขน โอเวอรชตสงสด เวลาเขาท และคาความผดพลาด ณ สถานะอยตวของระบบ ทไดจากทง 3 ตวควบคม โดยการควบคมสญญาณเอาทพต/อนพตผานอปกรณ UEIPAC-300 และออกแบบตวควบคมดวยโปรแกรม MATLAB/Simulink จากการศกษาพบวา Digital PID นนไดคาโอเวอรชตต าสดและคาความผดพลาด ณ สถานะอยตว นอยทสด และมชวงเวลาขนทใกลเคยงกบ ตวควบคมแบบ On/Off และคาเวลาเขาทใกลเคยงกบ ตวควบคม PID
ค าส าคญ : ตวควบคม Digital PID ตวควบคม PID ตวควบคมแบบ On/Off
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
19FEAT JOURNALJanuary - June 2017; 3(1) : 19-24
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
Abstract
This research had studied about development of a PID control law for an On/Off actuator. In this paper, This’ll be called Digital PID for designing the controller what have suitability with an On/Off actuator. By comparing with other controller that have been used in many industries such as On/Off controller and PID controller for using three-controller to control water temperature in a thermal opened system which circulates water all the time and actuator have worked with digital output signal. With comparing from many performance is Rise time, Overshoot, Settling time, and Steady-state error. The input/output signals of each controller was controlled by a UEIPAC-300 device and the embedded real-time hardware in the loop of MATLAB/Simulink.In the conclusion,Digital PID has lowest both overshoot and Steady-state error.With Rise time, Digital PID had this value approximately wi th On/Of f conto l le r and had Set t l ing t ime approx imate ly wi th P ID cont ro l le r . Keywords: Digital PID controller, PID controller, On/Off controller ______________________________________________ *ตดตอ: : อเมลล : [email protected], โทรศพท : 081-262-4949
1. บทน า
เนองจากการควบคมแบบพไอด เปนการควบคมทม โครงสรางการท างานท ไมซบซอน งายตอการออกแบบ และการก าหนดคาพาราม เตอรใหตวควบคมสามารถกระท าไดโดยงาย ท าใหหลกการควบคมด งกลาวยงคง เป นท น ยมกนอย อย า งแพรหลาย แมวาในปจจบนจะมหลกการและทฤษฎการควบคมแบบใหมๆ ทพฒนาขนมากตาม [1,2] ในการออกแบบตวควบคมแบบพไอดมจดประสงคเพอควบคมระบบใหเปนไปตามคาเปาหมาย คอ มความเทยงตรงและถกตอง การควบคมแบบพไอด เปนการควบคมแบบ 3 องคประกอบ (Three term control) ทประกอบดวยองคประกอบทส าคญสามสวนไดแก Proportional (P) หมายถงการปรบสดสวนสญญาณ Integral (I) หมายถง การอนทเกรตสญญาณและDerivative (D) หมายถง การอนพนธสญญาณ กลไก
ทงสามจะกระท ากบสญญาณแลวถกรวมตวเขาดวยกน เพอท าหนาทปรบแตงสญญาณควบคมอยางเหมาะสม เพอใหเกดผลตอบสนองตามทตองการ[3] ทงนในการใชงานตวควบคมอาจไมไดใชกลไกทงสามพรอมกนทเดยว แตเลอกใชท างานรวมกนในแบบตางๆ เพอวตถประสงคเฉพาะทแตกตางกนไป เชน การควบคมแบบพ การควบคมแบบพไอ หรอ การควบคมแบบพด เปนตน ดงนนจงเปนทมาของงานวจยน คอเพอน าหลกการ
PID มาประยกตใชใหมความเหมาะสมกบอปกรณการท างานทมสญญาณรบเขาแบบด จตอลหรออปกรณทท างานแบบปด เปด นนเอง
2. ทฤษฎการออกแบบตวควบคม Digital PID
ในสวนนจะน าเสนอ ทฤษฎ Digital PID controllerทมรากฐานมาจาก PID ธรรมดา [4] แตมการปรบปรง
20 FEAT JOURNALJanuary - June 2017; 3(1) : 19-24

FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
ใหมความเหมาะสมกบอปกรณการท างานมสญญาณเอาทพตแบบ on/off โดยกระบวนการจะแบงออกเปน 4 สวนดงน
รปท 1 ระบบ Digital PID controller
2.1 Dead Zone
คา Error จะมาจากคาความตางระหวาง คา Setpoint (SP) กบคา Process value (PV) กอนเขา Dead Zone (DZ) ตอจากนน ถาคานนอยในชวง limit control zone คาทไดจะผานเขาไปใน Dead Zone เพอจดการกบ small constant oscillation ในระบบ โดยใน Dead Zone จะมการพจารณาคาทอยนอกชวงเปน ER = (SP-PV)+DZ และ ER = (SP-PV)-DZ
รปท 2 วธการของ Dead Zone [6]
2.2 Control Zone
ในกรณทคา Error นนไมอยในชวง Limit control zone หรอกคอ มคาต ากวา Lower control zone หรอ
มากกวา Upper control zone คาเหลาน จะถกดงออกมาเพอเขาสกระบวนการ Control Zone โดยมวธการท างานกคอ
- ถา Error ทไดนอยกวา Lower control zone ทตงไว Output ทไดจะเปนสญญาณสงปดอปกรณการท างาน
- ถ า Error ท ไ ด ม า ก ก ว า Upper control zone ทตงไว Output ทไดจะเปนสญญาณสงเปดอปกรณการท างาน
- ถา Error ทไดอยในชวง limit Control Zone คา Error นจะผานเขาไปยงกระบวนการ Dead Zone และPID Algorithm ตามล าดบ
รปท 3 วธการของ Control Zone [6]
2.3 PID Algorithm
ตอไป คาทไดจาก Dead Zone จะผานเขามายงก ระบ วน ก า ร PID controller โด ย ใน ส ว น น จ ะเหมอนกบหลกการ PID ทวไป คอแบงออกเปน 3 สวน ค อ Proportional, integral แ ล ะ derivative โ ด ยสญญานขาออกทได u(t) จะมาจากสมการ
21FEAT JOURNALJanuary - June 2017; 3(1) : 19-24
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
โดยท
u(t) = คาสญญาณเอาทพท
e(t) = คาความผดพลาดในขณะนน
Kp = อตราขยายสดสวน
Ki = อตราขยายปรพนธ
Kd = อตราขยายอนพนธ
โดยวธการหาคา Kp , Ki , Kd นนทางผทดลองจะใชวธการของซเกลอร-นโคลส (Ziegler- Nichols) โดยวธการวฎจกรทายสด (Ultimate Cycle Method) ในการปรบคาเกนตวควบคมเนองจากเปนวธทไมซบซอนและมประสทธภาพ [5]
2.4 Pulse Generator
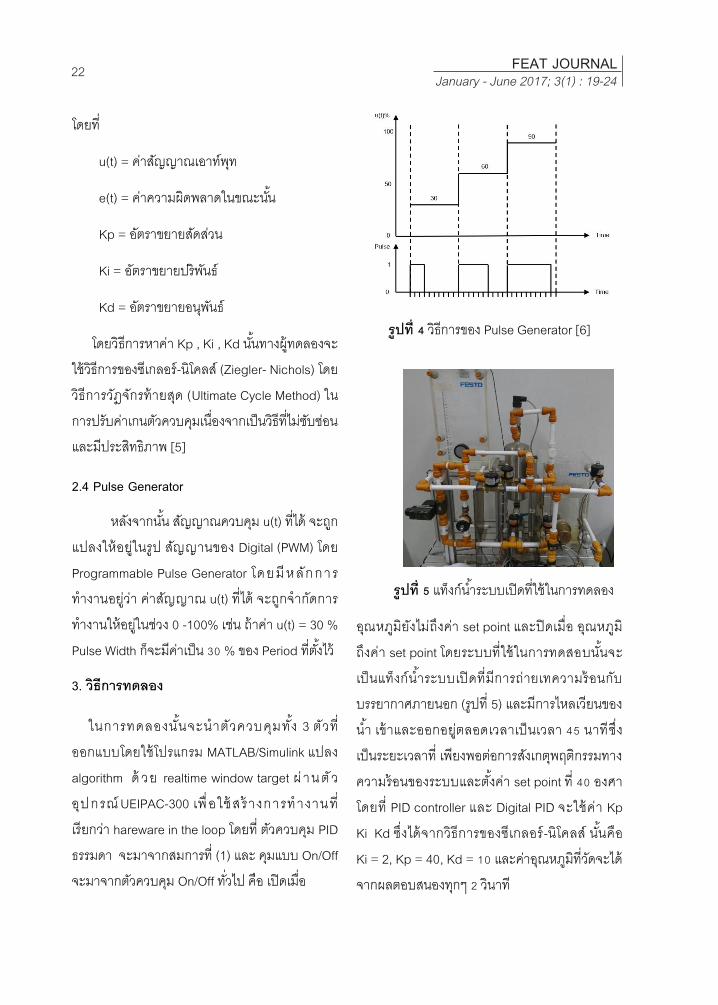
หลงจากนน สญญาณควบคม u(t) ทได จะถกแปลงใหอยในรป สญญานของ Digital (PWM) โดย Programmable Pulse Generator โดยม หลกการท างานอยวา คาสญญาณ u(t) ทได จะถกจ ากดการท างานใหอยในชวง 0 -100% เชน ถาคา u(t) = 30 % Pulse Width กจะมคาเปน 30 % ของ Period ทตงไว
3. วธการทดลอง
ในการทดลองนนจะน าตวควบคมทง 3 ตวทออกแบบโดยใชโปรแกรม MATLAB/Simulink แปลง algorithm ด วย realtime window target ผ านต วอปกรณUEIPAC-300 เพ อ ใชส รางการท างานทเรยกวา hareware in the loop โดยท ตวควบคม PID ธรรมดา จะมาจากสมการท (1) และ คมแบบ On/Off จะมาจากตวควบคม On/Off ทวไป คอ เปดเมอ
รปท 4 วธการของ Pulse Generator [6]
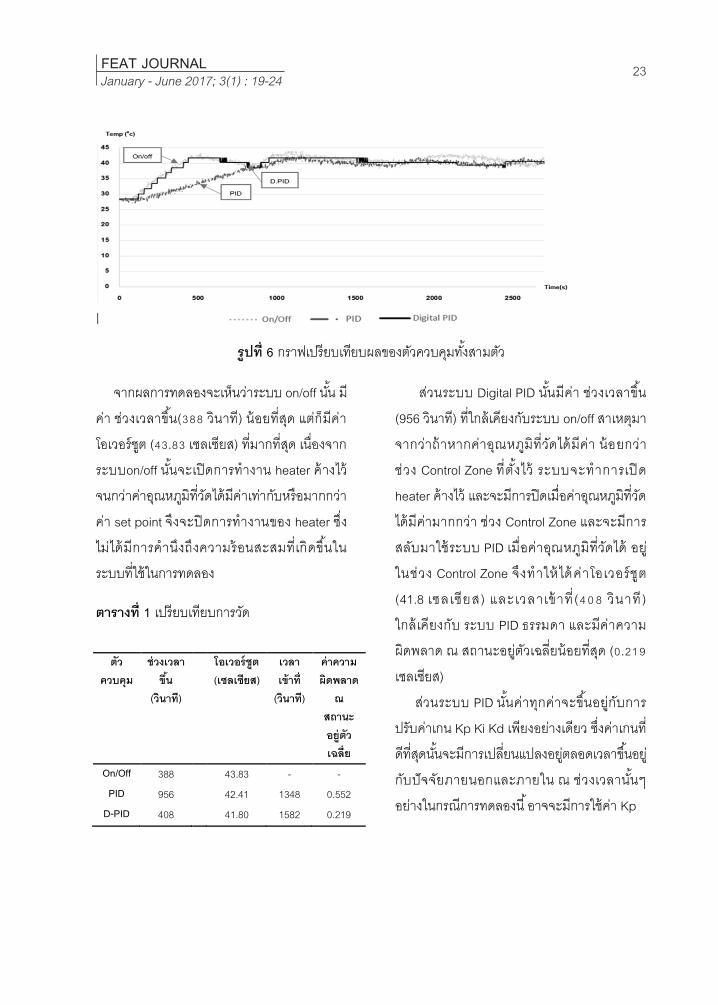
รปท 5 แทงกน าระบบเปดทใชในการทดลอง
อณหภมยงไมถงคา set point และปดเมอ อณหภมถงคา set point โดยระบบทใชในการทดสอบนนจะเปนแทงกน าระบบเปดทมการถายเทความรอนกบ บรรยากาศภายนอก (รปท 5) และมการไหลเวยนของน า เขาและออกอยตลอดเวลาเปนเวลา 45 นาทซงเปนระยะเวลาท เพยงพอตอการสงเกตพฤตกรรมทางความรอนของระบบและตงคา set point ท 40 องศา โดยท PID controller และ Digital PID จะใชคา Kp Ki Kd ซงไดจากวธการของซเกลอร-นโคลส นนคอ Ki = 2, Kp = 40, Kd = 10 และคาอณหภมทวดจะไดจากผลตอบสนองทกๆ 2 วนาท
22 FEAT JOURNALJanuary - June 2017; 3(1) : 19-24
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
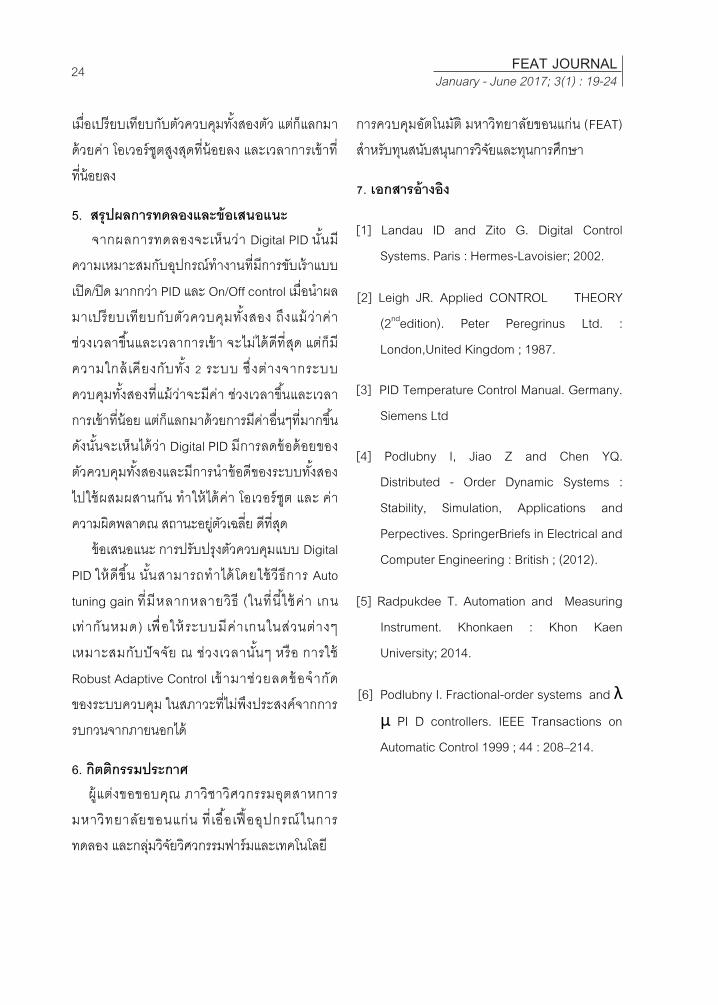
รปท 6 กราฟเปรยบเทยบผลของตวควบคมทงสามตว
จากผลการทดลองจะเหนวาระบบ on/off นน มคา ชวงเวลาขน(388 วนาท) นอยทสด แตกมคา โอเวอรชต (43.83 เซลเซยส) ทมากทสด เนองจากระบบon/off นนจะเปดการท างาน heater คางไวจนกวาคาอณหภมทวดไดมคาเทากบหรอมากกวา คา set point จงจะปดการท างานของ heater ซงไมไดมการค านงถงความรอนสะสมทเกดขนในระบบทใชในการทดลอง
ตารางท 1 เปรยบเทยบการวด
สวนระบบ Digital PID นนมคา ชวงเวลาขน (956 วนาท) ทใกลเคยงกบระบบ on/off สาเหตมาจากวาถาหากคาอณหภมทวดไดมคา นอยกวา ชวง Control Zone ทตงไว ระบบจะท าการเปด heater คางไว และจะมการปดเมอคาอณหภมทวดไดมคามากกวา ชวง Control Zone และจะมการสลบมาใชระบบ PID เมอคาอณหภมทวดได อยในชวง Control Zone จงท าใหไดคาโอเวอรชต (41.8 เซลเซยส) และเวลาเขาท (408 วนาท ) ใกลเคยงกบ ระบบ PID ธรรมดา และมคาความผดพลาด ณ สถานะอยตวเฉลยนอยทสด (0.219 เซลเซยส) สวนระบบ PID นนคาทกคาจะขนอยกบการปรบคาเกน Kp Ki Kd เพยงอยางเดยว ซงคาเกนทดทสดนนจะมการเปลยนแปลงอยตลอดเวลาขนอยกบปจจยภายนอกและภายใน ณ ชวงเวลานนๆ อยางในกรณการทดลองน อาจจะมการใชคา Kp
ตวควบคม
ชวงเวลาขน
(วนาท)
โอเวอรชต(เซลเซยส)
เวลาเขาท
(วนาท)
คาความผดพลาด
ณ สถานะอยตวเฉลย
On/Off 388 43.83 - - PID 956 42.41 1348 0.552
D-PID 408 41.80 1582 0.219
23FEAT JOURNALJanuary - June 2017; 3(1) : 19-24
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
เมอเปรยบเทยบกบตวควบคมทงสองตว แตกแลกมาดวยคา โอเวอรชตสงสดทนอยลง และเวลาการเขาท ทนอยลง
5. สรปผลการทดลองและขอเสนอแนะ จากผลการทดลองจะเหนวา Digital PID นนมความเหมาะสมกบอปกรณท างานทมการขบเราแบบ เปด/ปด มากกวา PID และ On/Off control เมอน าผลมาเปรยบเทยบกบตวควบคมทงสอง ถงแมวาคาชวงเวลาขนและเวลาการเขา จะไมไดดทสด แตกมความใกลเคยงกบทง 2 ระบบ ซ งตางจากระบบควบคมทงสองทแมวาจะมคา ชวงเวลาขนและเวลาการเขาทนอย แตกแลกมาดวยการมคาอนๆทมากขน ดงนนจะเหนไดวา Digital PID มการลดขอดอยของตวควบคมทงสองและมการน าขอดของระบบทงสองไปใชผสมผสานกน ท าใหไดคา โอเวอรชต และ คาความผดพลาดณ สถานะอยตวเฉลย ดทสด ขอเสนอแนะ การปรบปรงตวควบคมแบบ Digital PID ใหดขน นนสามารถท าไดโดยใชว ธการ Auto tuning gain ทมหลากหลายวธ (ในทน ใชคา เกน เทากนหมด) เพ อใหระบบมคาเกนในสวนตางๆ เหมาะสมกบปจจย ณ ชวงเวลานนๆ หรอ การใช Robust Adaptive Control เขามาชวยลดขอจ ากดของระบบควบคม ในสภาวะทไมพงประสงคจากการรบกวนจากภายนอกได
6. กตตกรรมประกาศ ผ แตงขอขอบคณ ภาวชาวศวกรรมอตสาหการ มหาวทยาลยขอนแกน ท เอ อ เฟออปกรณในการทดลอง และกลมวจยวศวกรรมฟารมและเทคโนโลย
การควบคมอตโนมต มหาวทยาลยขอนแกน (FEAT) ส าหรบทนสนบสนนการวจยและทนการศกษา
7. เอกสารอางอง
[1] Landau ID and Zito G. Digital Control Systems. Paris : Hermes-Lavoisier; 2002.
[2] Leigh JR. Applied CONTROL THEORY (2ndedition). Peter Peregrinus Ltd. : London,United Kingdom ; 1987.
[3] PID Temperature Control Manual. Germany. Siemens Ltd
[4] Podlubny I, Jiao Z and Chen YQ. Distributed - Order Dynamic Systems : Stability, Simulation, Applications and Perpectives. SpringerBriefs in Electrical and Computer Engineering : British ; (2012).
[5] Radpukdee T. Automation and Measuring Instrument. Khonkaen : Khon Kaen University; 2014.
[6] Podlubny I. Fractional-order systems and λ μ PI D controllers. IEEE Transactions on Automatic Control 1999 ; 44 : 208–214.
24 FEAT JOURNALJanuary - June 2017; 3(1) : 19-24

_________________________________________________________________________________
____________________________________________________________________________________________________________________________________________
เสนทางทเหมาะสมของปลายแขนกลกรดยางพารา Appropriated Trajectory of End Effector for Para Rubber Tapping
ยงยทธ เสยงดง* พยงศกด จลยเสน และ คงเดช พะสนาม Yongyuth Sengdang* Payungsak Junyusen and Khongdet Phasinam
สาขาวชาวศวกรรมเกษตร ส านกวชาวศวกรรมศาสตร มหาวทยาลยเทคโนโลยสรนาร สาขาวชาวศวกรรมเกษตรและอาหาร คณะเทคโนโลยการเกษตรและอาหาร มหาวทยาลยราชภฏพบลสงคราม
School of Agricultural Engineering, Institute of Engineering, Suranaree University of Technology School of Agricultural and Food Engineering, Faculty of Food and Agricultural Technology,
Pibulsongkram Rajabhat University. Received: 1 พ.ย. 59 Accepted: 9 ก.พ. 60
บทคดยอ
งานวจยนมวตถประสงคเพอเลอกเสนทางการเคลอนททเหมาะสมของปลายแขนกลกรดยางพารา ปลายแขนกลถกสรางจากตวขบเราเชงเสนสองตวทตดตงอยดานบนของชดจบยดกบล าตนยางพารา เสนทางการเคลอนทของปลายแขนกลไดจากสมการการเคลอนทแบบเสนตรง โพลโนเมยล และวงกลม ของตวขบเราเชงเสนทงสอง การทดสอบท าโดยการใหปลายแขนกลเคลอนทไปบนตนยางจ าลอง ผลการทดสอบพบวา เสนทางการเคลอนททสรางจากสมการเสนตรง และสมการวงกลมเปนเสนทางทเหมาะสมส าหรบการกรดยาง
ค าส าคญ : เสนทางการเคลอนท ปลายแขนกล ตวขบเราเชงเสน การกรดยางพารา
Abstract
The objective of this study was to select an appropriated trajectory of end effector for Para rubber tapping. The end effector was fabricated from two linear actuators, which was supported by special frame. The trajectories of the end effector were expressed from motion types of both actuators: linear, polynomial and circle types. The experimental was done by guiding the end effector on the
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
25FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
model of rubber tree. The results showed that the trajectory generated from linear and circle equations was appropriated for the rubber tapping.
Keywords: Trajectory, End effector, Linear actuator, rubber tapping ___________________________________________________________________________________ *ตดตอ: อเมล : [email protected], โทรศพท : 089-8640019, โทรสาร : 044-244610
1. บทน า
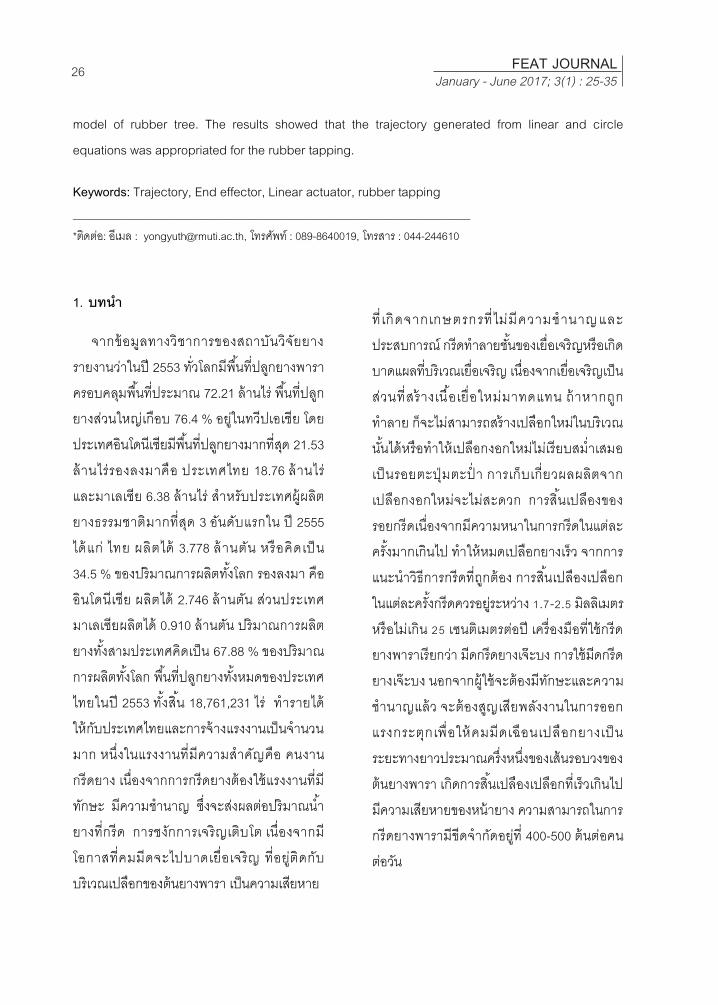
จากขอมลทางวชาการของสถาบนวจยยาง รายงานวาในป 2553 ทวโลกมพนทปลกยางพาราครอบคลมพนทประมาณ 72.21 ลานไร พนทปลกยางสวนใหญเกอบ 76.4 % อยในทวปเอเชย โดยประเทศอนโดนเซยมพนทปลกยางมากทสด 21.53 ลานไรรองลงมาคอ ประเทศไทย 18.76 ลานไร และมาเลเซย 6.38 ลานไร ส าหรบประเทศผ ผลตยางธรรมชาตมากทสด 3 อนดบแรกใน ป 2555 ไดแก ไทย ผลตได 3.778 ลานตน หรอคดเปน 34.5 % ของปรมาณการผลตทงโลก รองลงมา คอ อนโดนเซย ผลตได 2.746 ลานตน สวนประเทศมาเลเซยผลตได 0.910 ลานตน ปรมาณการผลตยางทงสามประเทศคดเปน 67.88 % ของปรมาณการผลตทงโลก พนทปลกยางทงหมดของประเทศไทยในป 2553 ทงสน 18,761,231 ไร ท ารายไดใหกบประเทศไทยและการจางแรงงานเปนจ านวนมาก หนงในแรงงานทมความส าคญคอ คนงานกรดยาง เนองจากการกรดยางตองใชแรงงานทมทกษะ มความช านาญ ซงจะสงผลตอปรมาณน ายางทกรด การชงกการเจรญเตบโต เนองจากมโอกาสทคมมดจะไปบาดเยอเจรญ ทอยตดกบบรเวณเปลอกของตนยางพารา เปนความเสยหาย
ท เกดจากเกษตรกรท ไมม ความช านาญและประสบการณ กรดท าลายชนของเยอเจรญหรอเกดบาดแผลทบรเวณเยอเจรญ เนองจากเยอเจรญเปนสวนทสรางเน อเยอใหมมาทดแทน ถาหากถกท าลาย กจะไมสามารถสรางเปลอกใหมในบรเวณนนไดหรอท าใหเปลอกงอกใหมไมเรยบสม าเสมอ เปนรอยตะป มตะป า การเกบเกยวผลผลตจากเปลอกงอกใหมจะไมสะดวก การสนเปลองของรอยกรดเนองจากมความหนาในการกรดในแตละครงมากเกนไป ท าใหหมดเปลอกยางเรว จากการแนะน าวธการกรดทถกตอง การสนเปลองเปลอกในแตละครงกรดควรอยระหวาง 1.7-2.5 มลลเมตรหรอไมเกน 25 เซนตเมตรตอป เครองมอทใชกรดยางพาราเรยกวา มดกรดยางเจะบง การใชมดกรดยางเจะบง นอกจากผ ใชจะตองมทกษะและความช านาญแลว จะตองสญเสยพลงงานในการออกแรงกระตกเพอใหคมมดเฉอนเปลอกยางเปนระยะทางยาวประมาณครงหนงของเสนรอบวงของตนยางพารา เกดการสนเปลองเปลอกทเรวเกนไป มความเสยหายของหนายาง ความสามารถในการกรดยางพารามขดจ ากดอยท 400-500 ตนตอคนตอวน
26 FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
[1] ไดท าการออกแบบและสรางมดก รดยางพาราแบบใชมอเตอรไฟฟา ใบมดจะเปนใบมดห ม น 4 ฟ น ม ม ห น า ม ด ม ม ม ด แ ล ะ ม ม หลงมดเทากบ 45o 30o และ 15o ตามล าดบ มกลไกความคมความหนาเพอลดการสนเปลองเปลอกทเรวเกนไปและลดความเสยหายของหนายาง ผ ใชงานมดกรดยางพารานไมจ าเปนตองใชแรงงานทมทกษะและความช านาญ กสามารถใชงานได แตกมขอดอยทตองไดรบการปรบปรงคอ ตองใชคนในการพามดกรดยางพาราแบบใชมอเตอรไฟฟาใหเคลอนทตามรอยกรดเดมและตองคอยควบคมความลกในการกรดดวย [2] ไดสรางแบบจ าลองทางคณตศาสตรของการเคลอนทของปลายแขนกลส าหรบเครองกรดยางพาราอตโนมต จากผลการด าเนนการพบวา แบบจ าลองทางคเนเมตกสของปลายแขนกลทมขอตอเปนแบบเลอนและมสามองศาอสระถกสรางบนพกดฉากเปรยบเทยบกบเสนทางการเคลอนทของรปรางรอยกรดทสรางจากสมการเฮลกซ เมอตนยางพาราถกก าหนดใหมล กษณะส ณฐานเปนรปทรงกระบอกและมมมกรด 30o เสนกราฟของเสนทางการเคลอนททงสองเสนทบกน เปนเสนเดยว ต าแหนงในการเคลอนทแตละแกนจากจดเรมตนไปยงจดสดทายมความถกตองแมนย าทงสามแกน ถงแมวาการจ าลองสถานการณดวยโปรแกรม SolidWorks® ปลายแขนกลสามารถเคลอนทตามรอยกรดของตนยางพาราได แตความเรวเรมตนและความเรวสดทายในบางแกน
ไมไดอยทศนย ซงจะกอใหเกด การสนของปลายแขนกลมผลตอความนนนวลในระหวางการเคลอนท
[3] ไดออกแบบตวควบคมแบบปอนกลบของปลายแขนกลส าหรบเครองกรดยางพาราอตโนมต ปลายแขนกลถกสรางดวยแบบจ าลองทางพลศาสตรโดยการขน รปตวขบเราเชงเสน(Linear Actuator) ทงสามแนวแกนดวยโปรแกรมเขยนแบบ เสนทางการเคล อนทแตละแกนถกสรางดวยสมการโพลโนเมยล สมการความเรงของเสนทางการเคลอนทจะถกเปลยนใหเปนแรงบดเพอปอนใหตวขบเราเชงเสนแตละแกน จ าลองการเคลอนทของปลายแขนกลใหเคลอนทตามเสนทางการเคลอนททออกแบบไว ออกแบบตวควบคมแบบปอนกลบเพอชดเชยคาความผดพลาดของเสนทางทเคลอนทไดใหเปนเสนทางเดยวกนหรอใกลเคยงกบเสนทางทออกแบบไว การตอบสนองของตวควบคมแบบปอนกลบจะถกตรวจสอบโดยใชการจ าลองดวยโปรแกรมคอมพวเตอร จากการจ าลองพบวา เสนทางการเคล อนท ท ได จากแบบจ าลองทางพลศาสตรผดพลาดจากเสนทางการเคลอนททสรางดวยสมการโพลโนเมยลสงสดในแนวแกน X เท ากบ 40 mm ในแนวแกน Y เทากบ 5 mm และในแนวแกน Z เทากบ 10 mm แตเมอใชตวควบคมแบบ PID ทมอตราขยายในแนวแกน X, Y และ Z เทากบ 30, 10 และ 15 ตามล าดบ ท าใหคาความผดพลาดในแตละแนวแกนไมเกน 0.5 mm แตงานวจยนเปนการ
27FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
จ าลองสถานการณ ในคอมพ ว เตอ ร ถ าน าอตราขยายของตวควบคมแบบปอนกลบไปใชกบรวมกบปลายแขนกลจรงจะกอใหเกดคาความผดพลาดในแตละแนวแกนแตกตางจากน
งานวจยนมวตถประสงคเพอศกษาเสนทางการเคล อนท ของปลายแขนกลกรดยางพารา ปลายแขนกลถกสรางดวยตวขบเราเชงเสนสองตว เสนทางการเคลอนทของตวขบเราเชงเสน A และตวขบเราเชงเสน B ถกสรางจากสมการคเนเมตกสรปแบบตางๆ เพอหารปแบบทเหมาะสมกบตนยางจ าลองทแกนในสรางจากไม ผวรอบนอกพอกดวยดนน ามนโดยการ เปรยบเทยบต าแหนงเสนทางการเคลอนททไดจากสมการคเนเมตกสกบเสนทางการเคลอนทไดจากตนยางจ าลอง
2. วธการวจย
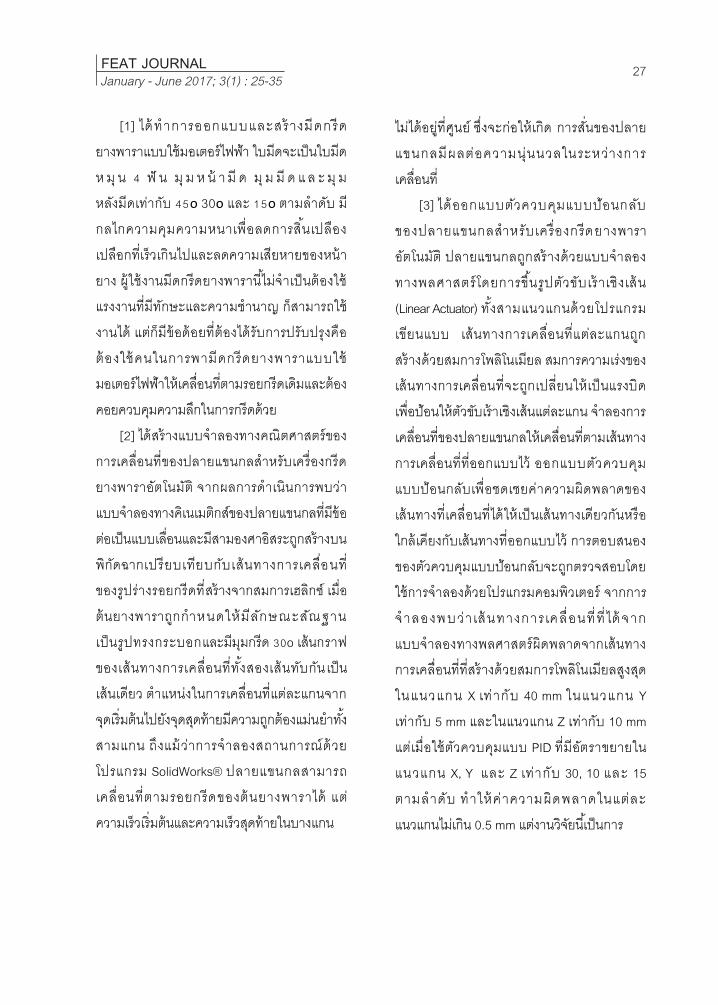
2.1 แบบจ าลองทางค เนเมตกสของปลาย แขนกล ปลายแขนกลกรดยางพาราสามารถสรางไดจากตวขบเราเชงเสน (Linear Actuator) ทตออนกรมกน เพอใหสามารถเคลอนทแบบเลอนในระบบพกดฉาก ตวขบเราเชงเสน A จะวางเอยงเปนมม 30 o กบแนวนอน สามารถ เคลอนทในแนวแกน X และแกน Y ไดพรอมกน ส วนต วขบ เรา เช ง เส น B จะวางในแนวนอน สามารถเคลอนทเขาออกตามความโคงของตนยางพาราในแนวแกน Z เมอมองจากดานบนตงฉากกบแนวเอยง 30 องศาของรอยกรดจะเหนพนทหนาตดของตนยางพาราเปนวงร ดงรปท 1 ก าหนดใหจดออรจนอยทต าแหนงบอลสกรทงสองแนวแกนเคลอนทออกสด
2.2 การสรางเสนทางการเคล อนท ของปลายแขนกล
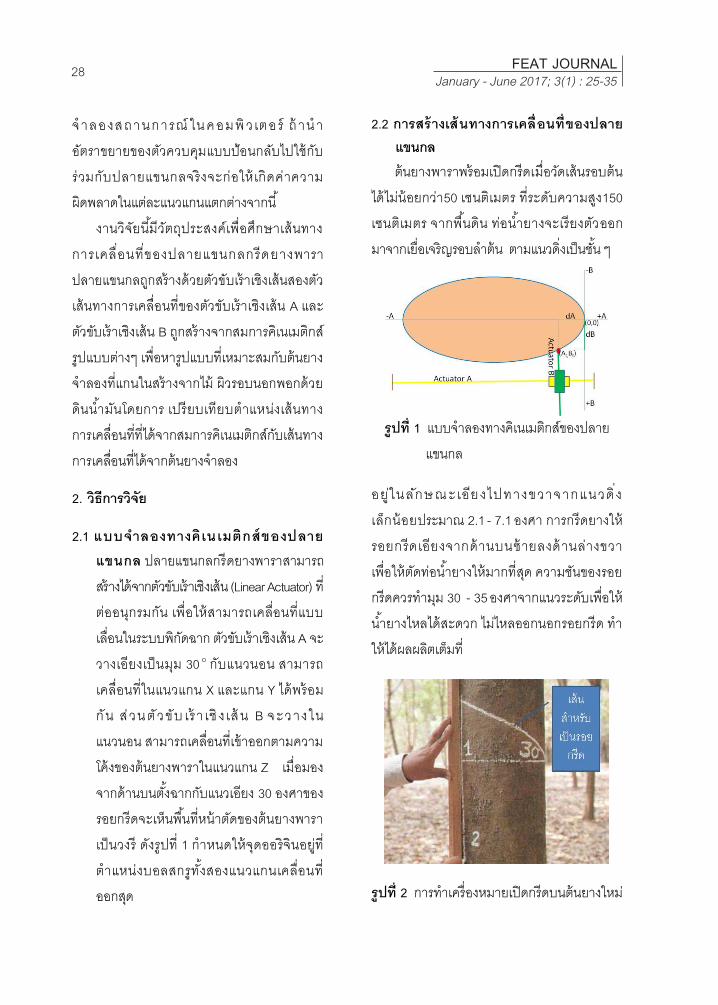
ตนยางพาราพรอมเปดกรดเมอวดเสนรอบตนไดไมนอยกวา50 เซนตเมตร ทระดบความสง150 เซนตเมตร จากพนดน ทอน ายางจะเรยงตวออก มาจากเยอเจรญรอบล าตน ตามแนวดงเปนชน ๆ
รปท 1 แบบจ าลองทางคเนเมตกสของปลาย
แขนกล
อย ในล กษณะเอ ย งไปทางขวาจากแนวด งเลกนอยประมาณ 2.1 - 7.1 องศา การกรดยางใหรอยกรดเอยงจากดานบนซายลงดานลางขวา เพอใหตดทอน ายางใหมากทสด ความชนของรอยกรดควรท ามม 30 - 35 องศาจากแนวระดบเพอใหน ายางไหลไดสะดวก ไมไหลออกนอกรอยกรด ท าใหไดผลผลตเตมท
รปท 2 การท าเครองหมายเปดกรดบนตนยางใหม
28 FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
ในการวจยไดท าการศกษาเสนทางการเคลอนทของปลายแขนกลของตวขบเราเชงเสน A จาก 3 สมการคเนเมตกสไดแกเสนทางการเคลอนทจากสมการเสนตรง สมการโพลโนเมยลและสมการครง วงกลม สวนเสนทางการเคลอนทของปลายแขนกลของตวขบเราเชงเสน B จะท าการศกษาจาก 2 สมการคเนเมตกสไดแกเสนทางการเคลอนทจากสมการโพลโนเมยลและสมการครงวงกลม โดยแยกพจารณาต าแหนงเสนทางการเคลอนทในแตละสมการไดดงน 2.2.1 เสนทางการเคลอนทจากสมการเสนตรง เสนทางการเคลอนทรปแบบนจะใชเฉพาะกบตวขบเราเช งเสน A เทานน สามารถเขยนสมการของต าแหนงการเคลอนทไดดงน เมอ
m = ความชนของเสนตรง t = เวลาทพจารณา (วนาท)
2.2.2 เสนทางการเคลอนทจากสมการโพลโนเมยล เสนทางการเคลอนทรปแบบนจะใชกบตวขบเราเชงเสน A และตวขบเราเชงเสน B ซงมสมการต าแหนงและความเรวในการเคลอนทตามล าดบดงน v(t) = k1+2k2t+3k3t2 (3)
เมอ q = ต าแหนงการเคลอนทของตวขบเราเชงเสน i (มลลเมตร)
V = ความเรวการเคลอนทของตวขบเราเชงเสน i (มลลเมตรตอวนาท) K = คาสมประสทธ จากสมการโพลโนเมยลก าลงสาม ในฟงกชนทราบเรยบ (Smooth Function) ตองทราบคาอยางนอย 4 เงอนไข โดย 2 เงอนไขมาจากคาต าแหนงเรมตนและคาต าแหนงสดทาย q(tf) = qf
สวนอก 2 เงอนไขมาจากกรณ ฟงกชนน นตอเนอง
v(t0) = v0
v(tf) = vf
แทนคาเงอนไขทง 4 เงอนไข ในสมการท (2) และสมการท (3) ตนยางพาราจ าลองทใชในการวจยจะม ขนาดเสนผาศน ยกลางเน อ ไ ม 220 มลลเมตร และความหนาเปลอกอกขางละ 10 ม ลล เมตร ใบม ดก รดยางแบบหมนม ขนาดเสนผ าศน ย กลาง 47.2 ม ลล เมต ร จากการออกแบบใหแตละแกนของปลายแขนกลท างานอสระตอกนท าใหมการขจดเชงเสนตามตารางท 1
A(t) = mt (1)
q(t) = k0+k1t+k2t2+k3t3 (2)
q(t0) = q0
29FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
แทนคาเงอนไขตาง ๆ ของแตละแกนตามตาราง ท 1 เพ อค านวณหาคาสมประสท ธ k0, k1, k2 และ k3
ตารางท 1 เงอนไขของสมการโพลโนเมยล
Actuator t0 (s)
tf (s)
q0 (mm)
qf (mm)
v0 (mm/s)
vf (mm/s)
A 0 10 0
307.92 0 0
B 133.36
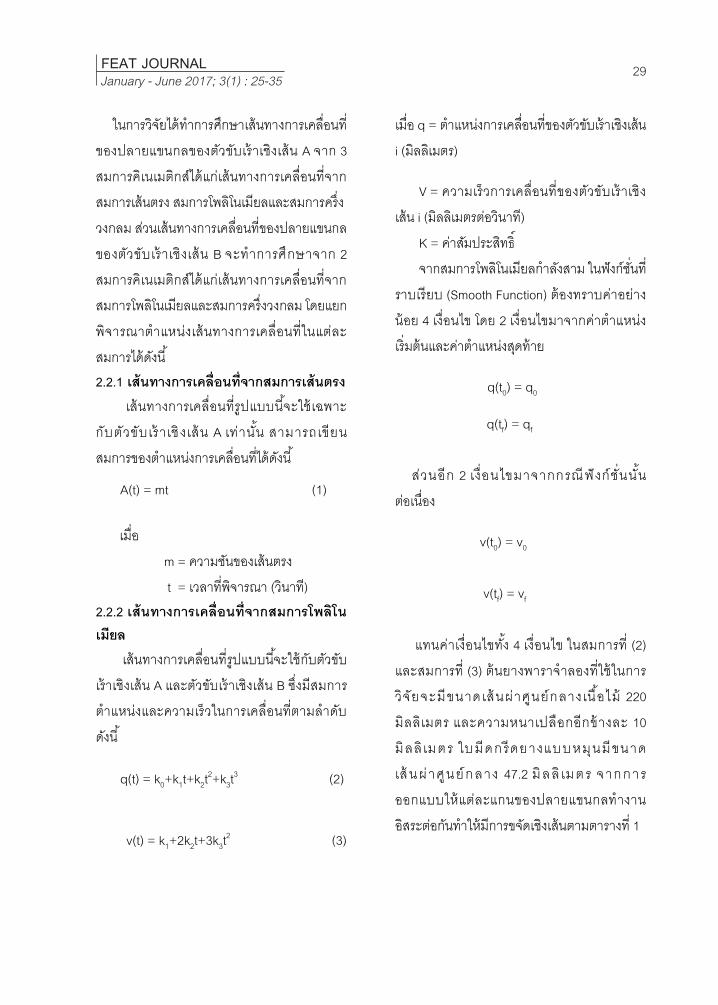
2.2.3 เสนทางการเคล อนท จากสมการครงวงกลม
เสนทางการเคลอนทรปแบบนจะใชกบตวขบเราเชงเสน A และตวขบเราเชงเสน B ซงมสมการต าแหนงในการเคลอนทดงน
รปท 3 เสนทางการเคลอนทจากสมการครงวงกลม
จากรป
เพราะฉะนน
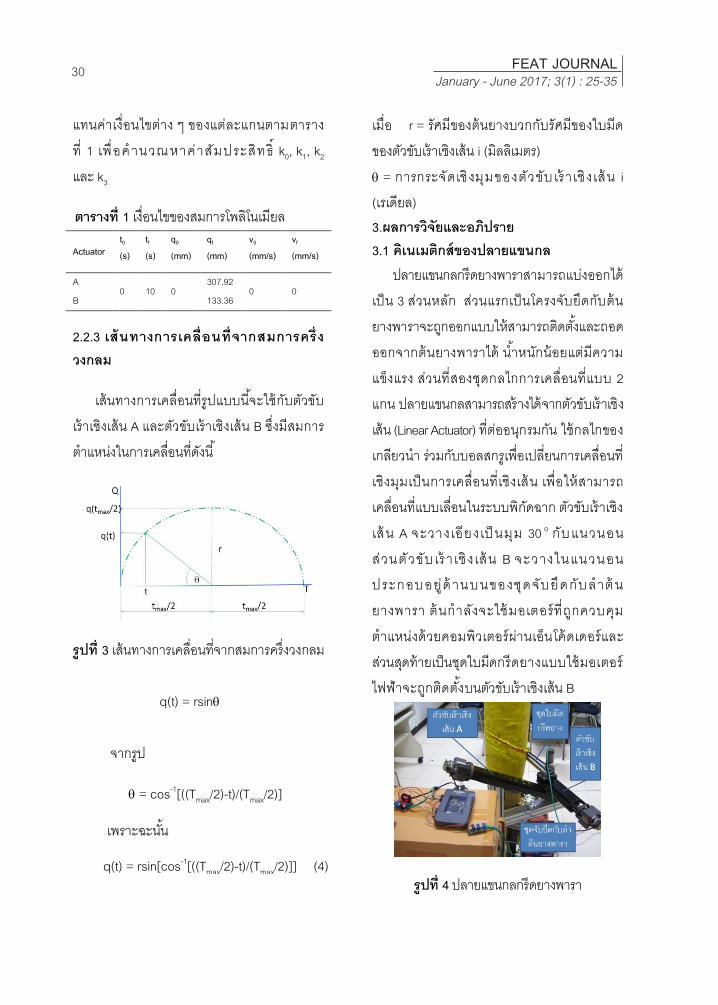
เมอ r = รศมของตนยางบวกกบรศมของใบมดของตวขบเราเชงเสน i (มลลเมตร) = การกระจดเชงมมของตวขบ เราเชงเสน i (เรเดยล) 3.ผลการวจยและอภปราย 3.1 คเนเมตกสของปลายแขนกล ปลายแขนกลกรดยางพาราสามารถแบงออกไดเปน 3 สวนหลก สวนแรกเปนโครงจบยดกบตนยางพาราจะถกออกแบบใหสามารถตดตงและถอดออกจากตนยางพาราได น าหนกนอยแตมความแขงแรง สวนทสองชดกลไกการเคลอนทแบบ 2 แกน ปลายแขนกลสามารถสรางไดจากตวขบเราเชงเสน (Linear Actuator) ทตออนกรมกน ใชกลไกของเกลยวน า รวมกบบอลสกรเพอเปลยนการเคลอนทเชงมมเปนการเคลอนทเชงเสน เพอใหสามารถเคลอนทแบบเลอนในระบบพกดฉาก ตวขบเราเชงเสน A จะวางเอยงเปนมม 30 o กบแนวนอน สวนตวขบ เรา เช ง เสน B จะวางในแนวนอน ประกอบอย ด านบนของชดจบยดกบล า ตนยางพารา ตนก าลงจะใชมอเตอรทถกควบคมต าแหนงดวยคอมพวเตอรผานเอนโคดเดอรและสวนสดทายเปนชดใบมดกรดยางแบบใชมอเตอรไฟฟาจะถกตดตงบนตวขบเราเชงเสน B
รปท 4 ปลายแขนกลกรดยางพารา
q(t) = rsin
= cos-1[((Tmax/2)-t)/(Tmax/2)]
q(t) = rsin[cos-1[((Tmax/2)-t)/(Tmax/2)]] (4)
30 FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
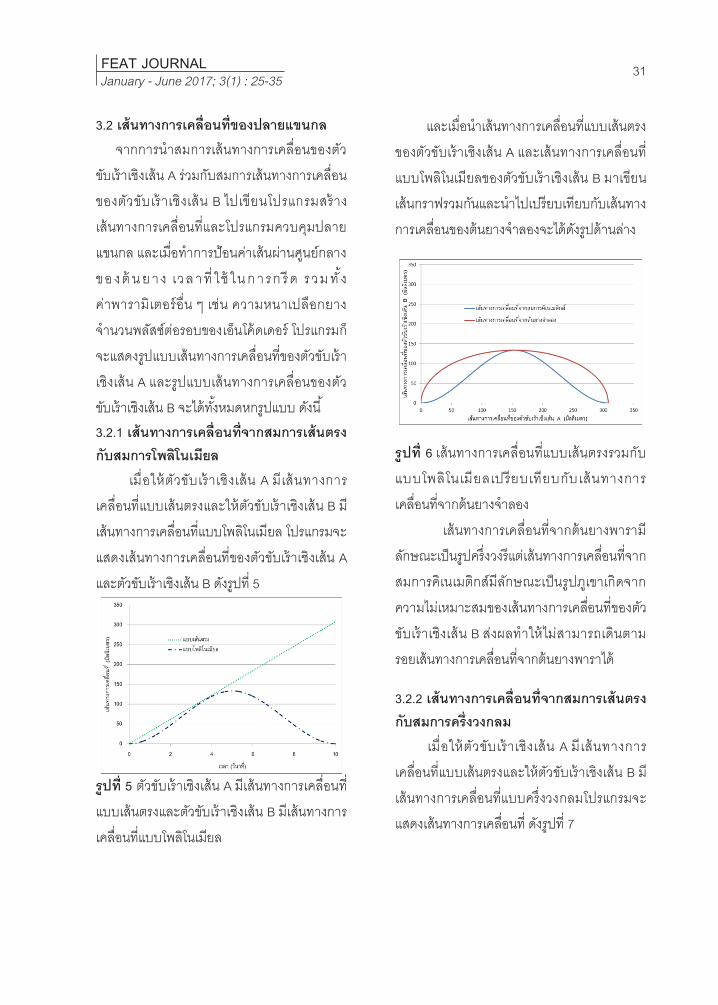
3.2 เสนทางการเคลอนทของปลายแขนกล จากการน าสมการเสนทางการเคลอนของตวขบเราเชงเสน A รวมกบสมการเสนทางการเคลอนของตวขบเราเชงเสน B ไปเขยนโปรแกรมสรางเสนทางการเคลอนทและโปรแกรมควบคมปลายแขนกล และเมอท าการปอนคาเสนผานศนยกลางขอ ง ต น ย า ง เว ล าท ใ ช ใน ก า รก รด รวม ท งคาพารามเตอรอน ๆ เชน ความหนาเปลอกยาง จ านวนพลสซตอรอบของเอนโคดเดอร โปรแกรมกจะแสดงรปแบบเสนทางการเคลอนทของตวขบเราเชงเสน A และรปแบบเสนทางการเคลอนของตวขบเราเชงเสน B จะไดทงหมดหกรปแบบ ดงน 3.2.1 เสนทางการเคลอนทจากสมการเสนตรงกบสมการโพลโนเมยล เมอใหตวขบเราเชงเสน A มเสนทางการเคลอนทแบบเสนตรงและใหตวขบเราเชงเสน B มเสนทางการเคลอนทแบบโพลโนเมยล โปรแกรมจะแสดงเสนทางการเคลอนทของตวขบเราเชงเสน A และตวขบเราเชงเสน B ดงรปท 5
รปท 5 ตวขบเราเชงเสน A มเสนทางการเคลอนทแบบเสนตรงและตวขบเราเชงเสน B มเสนทางการเคลอนทแบบโพลโนเมยล
และเมอน าเสนทางการเคลอนทแบบเสนตรงของตวขบเราเชงเสน A และเสนทางการเคลอนทแบบโพลโนเมยลของตวขบเราเชงเสน B มาเขยนเสนกราฟรวมกนและน าไปเปรยบเทยบกบเสนทางการเคลอนของตนยางจ าลองจะไดดงรปดานลาง
รปท 6 เสนทางการเคลอนทแบบเสนตรงรวมกบแบบโพลโนเมยลเปรยบเทยบกบเสนทางการเคลอนทจากตนยางจ าลอง
เสนทางการเคลอนทจากตนยางพารามลกษณะเปนรปครงวงรแตเสนทางการเคลอนทจากสมการคเนเมตกสมลกษณะเปนรปภเขาเกดจากความไมเหมาะสมของเสนทางการเคลอนทของตวขบเราเชงเสน B สงผลท าใหไมสามารถเดนตามรอยเสนทางการเคลอนทจากตนยางพาราได
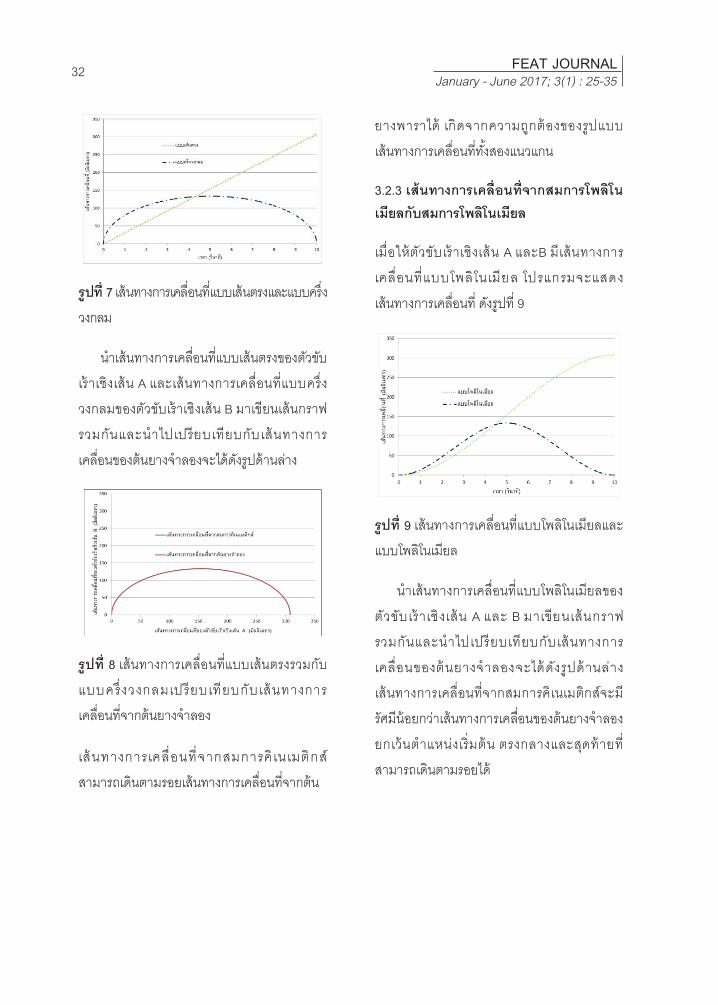
3.2.2 เสนทางการเคลอนทจากสมการเสนตรงกบสมการครงวงกลม เมอใหตวขบเราเชงเสน A มเสนทางการเคลอนทแบบเสนตรงและใหตวขบเราเชงเสน B มเสนทางการเคลอนทแบบครงวงกลมโปรแกรมจะแสดงเสนทางการเคลอนท ดงรปท 7
31FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
รปท 7 เสนทางการเคลอนทแบบเสนตรงและแบบครงวงกลม
น าเสนทางการเคลอนทแบบเสนตรงของตวขบเราเชงเสน A และเสนทางการเคลอนทแบบครงวงกลมของตวขบเราเชงเสน B มาเขยนเสนกราฟรวมกนและน าไปเปรยบเทยบกบเสนทางการเคลอนของตนยางจ าลองจะไดดงรปดานลาง
รปท 8 เสนทางการเคลอนทแบบเสนตรงรวมกบแบบค รงวงกลมเปรยบเทยบกบเสนทางการเคลอนทจากตนยางจ าลอง
เสนทางการเคลอนท จากสมการค เนเมตก สสามารถเดนตามรอยเสนทางการเคลอนทจากตน
ยางพาราได เกดจากความถกตองของรปแบบเสนทางการเคลอนททงสองแนวแกน
3.2.3 เสนทางการเคลอนทจากสมการโพลโนเมยลกบสมการโพลโนเมยล
เมอใหตวขบเราเชงเสน A และB มเสนทางการเคลอนทแบบโพลโนเมยล โปรแกรมจะแสดงเสนทางการเคลอนท ดงรปท 9
รปท 9 เสนทางการเคลอนทแบบโพลโนเมยลและแบบโพลโนเมยล
น าเสนทางการเคลอนทแบบโพลโนเมยลของตวขบเราเชงเสน A และ B มาเขยนเสนกราฟรวมกนและน าไปเปรยบเทยบกบเสนทางการเคลอนของตนยางจ าลองจะไดดงรปดานลาง เสนทางการเคลอนทจากสมการคเนเมตกสจะมรศมนอยกวาเสนทางการเคลอนของตนยางจ าลอง ยกเวนต าแหนงเรมตน ตรงกลางและสดทายทสามารถเดนตามรอยได
32 FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
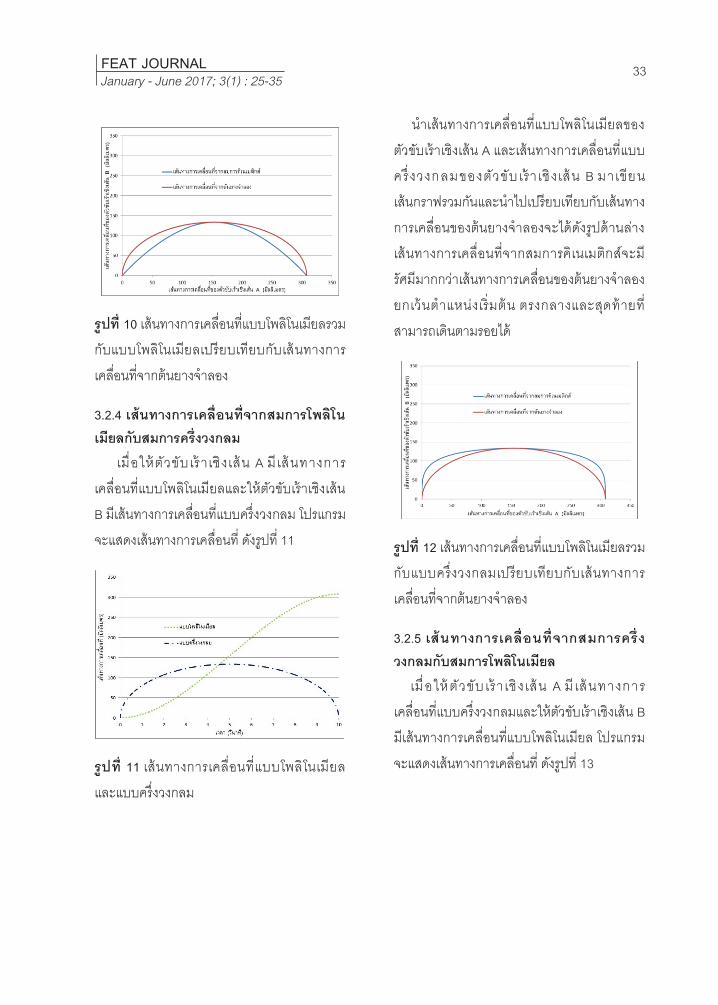
รปท 10 เสนทางการเคลอนทแบบโพลโนเมยลรวมกบแบบโพลโนเมยลเปรยบเทยบกบเสนทางการเคลอนทจากตนยางจ าลอง
3.2.4 เสนทางการเคลอนทจากสมการโพลโนเมยลกบสมการครงวงกลม เม อใหตวขบเราเชงเสน A ม เสนทางการเคลอนทแบบโพลโนเมยลและใหตวขบเราเชงเสน B มเสนทางการเคลอนทแบบครงวงกลม โปรแกรมจะแสดงเสนทางการเคลอนท ดงรปท 11
รปท 11 เสนทางการเคลอนทแบบโพลโนเมยลและแบบครงวงกลม
น าเสนทางการเคลอนทแบบโพลโนเมยลของตวขบเราเชงเสน A และเสนทางการเคลอนทแบบค รงวงกลมของตวขบ เราเชงเสน B มาเขยนเสนกราฟรวมกนและน าไปเปรยบเทยบกบเสนทางการเคลอนของตนยางจ าลองจะไดดงรปดานลาง เสนทางการเคลอนทจากสมการคเนเมตกสจะมรศมมากกวาเสนทางการเคลอนของตนยางจ าลอง ยกเวนต าแหนงเรมตน ตรงกลางและสดทายทสามารถเดนตามรอยได
รปท 12 เสนทางการเคลอนทแบบโพลโนเมยลรวมกบแบบครงวงกลมเปรยบเทยบกบเสนทางการเคลอนทจากตนยางจ าลอง
3.2.5 เสนทางการเคลอนท จากสมการครงวงกลมกบสมการโพลโนเมยล เม อ ใหตวขบ เรา เชง เสน A ม เสนทางการเคลอนทแบบครงวงกลมและใหตวขบเราเชงเสน B มเสนทางการเคลอนทแบบโพลโนเมยล โปรแกรมจะแสดงเสนทางการเคลอนท ดงรปท 13
33FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
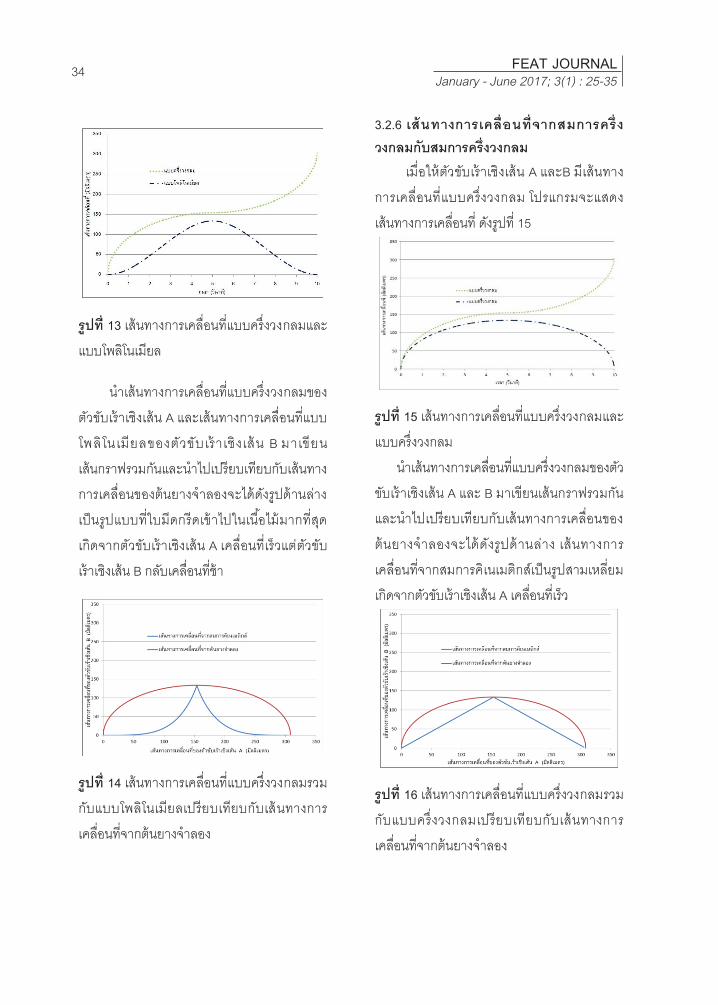
รปท 13 เสนทางการเคลอนทแบบครงวงกลมและแบบโพลโนเมยล
น าเสนทางการเคลอนทแบบครงวงกลมของตวขบเราเชงเสน A และเสนทางการเคลอนทแบบโพลโนเมยลของตวขบเราเชงเสน B มาเขยนเสนกราฟรวมกนและน าไปเปรยบเทยบกบเสนทางการเคลอนของตนยางจ าลองจะไดดงรปดานลาง เปนรปแบบทใบมดกรดเขาไปในเนอไมมากทสด เกดจากตวขบเราเชงเสน A เคลอนทเรวแตตวขบเราเชงเสน B กลบเคลอนทชา
รปท 14 เสนทางการเคลอนทแบบครงวงกลมรวมกบแบบโพลโนเมยลเปรยบเทยบกบเสนทางการเคลอนทจากตนยางจ าลอง
3.2.6 เสนทางการเคล อนท จากสมการครงวงกลมกบสมการครงวงกลม เมอใหตวขบเราเชงเสน A และB มเสนทางการเคลอนทแบบครงวงกลม โปรแกรมจะแสดงเสนทางการเคลอนท ดงรปท 15
รปท 15 เสนทางการเคลอนทแบบครงวงกลมและแบบครงวงกลม น าเสนทางการเคลอนทแบบครงวงกลมของตวขบเราเชงเสน A และ B มาเขยนเสนกราฟรวมกนและน าไปเปรยบเทยบกบเสนทางการเคลอนของตนยางจ าลองจะไดดงรปดานลาง เสนทางการเคลอนทจากสมการคเนเมตกสเปนรปสามเหลยมเกดจากตวขบเราเชงเสน A เคลอนทเรว
รปท 16 เสนทางการเคลอนทแบบครงวงกลมรวมกบแบบครงวงกลมเปรยบเทยบกบเสนทางการเคลอนทจากตนยางจ าลอง
34 FEAT JOURNALJanuary - June 2017; 3(1) : 25-35
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
4.สรป จากผลการวจยจะเหนวาเสนทางการเคลอนทของตวขบเราเชงเสน A ทสรางมาจากสมการเสนตรงไดรปแบบการเคลอนทแบบเสนตรงรวมกบเสนทางการเคลอนทของตวขบเราเชงเสน B ทสรางมาจากสมการครงวงกลมทไดรปแบบการเคลอนทแบบครงวงกลม สามารถเคลอนทตามเสนทางการเคลอนททไดมาจากตนยางจ าลองไดทกต าแหนงของการเคลอนท สวนรปแบบเสนทางการเคลอนทแบบอน ๆ สามารถเคลอนทตามเสนทางการเคลอนทท ไดมาจากตนยางจ าลองได เฉพาะต าแหนงเรมตน ตรงกลางและสดทายเทานน
5.เอกสารอางอง
[1] Sengdang Y. Design and Prototyping of the Para rubberTapping Machine by Using Electrical Motor [MSc thesis]. Nakhonratchasima: Suranaree University of Tecnology; 2009.
[2] Sengdang Y and et al. Mathematical Modeling of an End-effector Motion for Automatic Para rubber Tapping Machine. Proceedings of the 14th Conference on Thailand Society of Agricultural Engineering; 2013 Apr 1-4; Prachuap Khiri Khan ; 2013.
[3] Sengdang Y and et al. Feedback Controller Design of an End-effector for Automatic Para rubber Tapping Machine.
Proceedings of the 15th Conference on Thailand Society of Agricultural Engineering; 2014 Apr 2-4; Ayutthaya; 2014.
35FEAT JOURNALJanuary - June 2017; 3(1) : 25-35

_________________________________________________________________________________
____________________________________________________________________________________________________________________________________________
การหาคาควบคมทเหมาะสมส าหรบเครองสขาวขาวขนาดเลก โดยใชวธพนผวตอบสนอง
Optimal Variable for Home Use Rice Milling Machine by Respond Surface Method วรวร ปญญาค า*, ปราโมทย พลคามน, สมเกยรต เตมสข และดสต สงหพรหมมาศ
Voravee Punyakum, Pramote Palicamin, Somkiat Thermsuk and Dusit Singpommat คณะครศาสตรอตสาหกรรม มหาวทยาลยเทคโนโลยราชมงคลกรงเทพ เลขท 2 ถนนนางลนจ
แขวงทงมหาเมฆ เขตสาทร กรงเทพมหานคร 10120 Received: 1 พ.ย. 59 Accepted: 9 ก.พ. 60
บทคดยอ
เครองสขาวขาวขนาดเลกมกจะสงผลใหขาวหกเกนคามาตรฐานและสขาวไดปรมาณต า การวจยครงนมจดมงหมายเพอลดปรมาณขาวทหกและเพมปรมาณขาวทสได วธการเพมประสทธภาพในการสขาวขาวขนาดเลกท าไดโดยขนตอนแรกสรางเครองสขาวขาวขนาดเลกใหสามารถควบคมความเรวของมอเตอรและอตราการปอน จากนนใชการออกแบบการทดลองแฟคทอเรยล 3 k และวธพนผวตอบสนอง เพอหาประสทธภาพการท างานของเครองทดทสด ผลทไดจะเปนดงน: ความเรวรอบของมอเตอรเทากบ 2087 รอบตอนาทและอตราการปอนคดเปนรอยละ 83.56 ซงท าใหเปนไปไดทจะคาดการณปรมาณของขาวตอนาทมคาเทากบ 1,433 กรมตอนาทและอตราการหกของขาวคดเปนรอยละ 3.42
ค าส าคญ : เครองสขาวขาวขนาดเลก การทดลองเชงแฟคทอเรยลแบบ 3k วธพนผวตอบสนอง
Abstract
Home use rice milling machine often resulted in broken rice up to standard and less the amount of product per minute. This research aims to decrease broken rice and increase the amount of product. The method to increase efficiency in home use rice milling machine. First step, Home use rice milling machine was adjusted to control the speed of the motor and the feed rate. Then applying an
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
37FEAT JOURNALJanuary - June 2017; 3(1) : 37-44
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
experimental design 3k factorial design and Response surface method to obtain the performance of the machine. The result is as follows: Speed of milling was 2087 rpm and the feed rate was 83.56 percent, which this data can be used to predict rice yield which is equal to 1433 grams per minute and the rate of deduction is equal to 3.42 percent.
Keywords: Home use rice milling machine Experimental 3k factorial design Response surface method ____________________________________________________________________________________ *ตดตอ: อเมล : [email protected], โทรศพท: 0854580963, โทรสาร: 022879639
1. บทน า จาก ปญ หาราค า ข าวตกต า รฐบ าลม ง
แกปญหา ก าหนดใหจดท าโครงการประชารฐ ใชแนวเศรฐกจพอเพยงเนนโรงสขาวชมชน ชวยท าให GDP เพมข น 0 .15% (ขอมล ส านกงานเศรฐกจการคลง) ซงกลมชาวนาจงหวดสรนท งดขายขาวเปลอกใหกบโรงสหรอพอคาคนกลาง หนมารวมกลมส ขาวเปลอกจากโรงสชมชนและน าขาวสารทไดไปจ าหนายเองโดย อบต.ประกนราคาให กก. ละ 20 บาท ชาวบานขายน าไปขาย กก.ละ 27 บาท (มารบขาวเอง) บรรจปรมาณขาวถงขนาด 5 ก.ก. และขนาด 48 กก.[1] สงผลใหเครองสขาวขนาดเลกเปนทตองการส าหรบชาวนาในหลายๆต าบลของประเทศไทยทหนมาพงพาตนเองดวยการสขาวขายตรงแกผบรโภคเพอแกปญหาราคาขาวตกต าดวยตวเอง [2] ดวยเหตผลขางตน คณะผวจย เหนความส าคญของเครองสขาวจงไดศกษางานของ อนาวน กรรณแกว และภมใจ เหลาผง นกศกษาภาควชาวศวกรรมไฟฟา คณะวศวกรรมศาสตร มหาวทยาลยเทคโนโลยราชมงคล (มทร.) ธญบร ไดพฒนาเครองสขาวขนาดเลกส าหรบใชในครวเรอน ไดออกแบบควบคมการ
ท างานดวยไมโครคอนโทรลเลอร PIC16F887 ใชหลกการแรงเสยดทานของลกกล ง ควบคมความเรวมอเตอรกระแสตรงดวยสญญาณ PWM จากชดค าสง Microcontroller จากการทดลองพบวา ในการสขาวกลอง ใชความเรวรอบของลกกลงขบท 390 rpm ความเรวรอบลกตามท 149 รอบ/นาท ใชจ านวนรอบการกะเทาะซ า 3 ครง สวนในการขดขาวใชความเรวรอบของลกกลงขบท 394.5 รอบ/นาท ความเรวลกตามท 149 รอบ/นาท ท าใหการท างานเครองสขาวเหมาะสมกบการสขาวกลอง [3] ซงสอดรบกบการวจย ของสรสทธ ชอวงศ มหาวทยาลยนราธวาสราชนครนทร เรองการสรางเครองสขาวกลอง พบปญหาวา ในขณะนมผสรางเครองสขาวกลองมาใชแตยงมจดดอยอยคอการออกแบบเครองสขาวกลองแบบมอหมน โดยใชลกกลงยางมาตรฐานขนาดเสนผานศนยกลาง 4 นว มการท างาน 3 ขนตอน คอ ขนตอนแรกการล าเลยงขาวเปลอกลงสหนาลกกลงยาง ควบคมความเรวในการปลอยขาวใหสมพนธกบความเรว ในการหมนเครองขนตอนทสองการกะเทาะเปลอก โดยใชลกกล งยาง 2 ลกหมน เขาหากน ดวยความเรวทแตกตางกน ขนตอนทสาม การแยก
38 FEAT JOURNALJanuary - June 2017; 3(1) : 37-44
แกลบแบบใชลมเปา จดทตองแกไขคอ การใชมอหมนจะท าใหควบคมความเรวไมได ใชลกกลง ลกจะท าใหการกะเทาะขาวเปลอกไมด จงไดเปลยนมาใชมอเตอรเปนตนก าลงใชลกกลงลกหมนในความเรวทตางกนท าการกะเทาะเปลอกขาวออกและมชดดดแยกเอาแกลบออกไป พบวาเครองสขาวกลองมคณภาพอยในระดบคณภาพด ได เปอรเซน ต เมลดด 85.14% การว เคราะหประสทธภาพของเครอง สอดคลองกบสมมตฐานทตงไว คอ คาเฉลยของเปอรเซนตเมลดดจากการสดวยเครองสขาวกลอง มคามากกวาการบดดวยครกสขาวส าหรบการวเคราะหหาชวงความเชอมนของการสขาวกลองดวยเครอง ทความเชอมนไมนอยกวา 95% จากการทดลองพบวาเปอรเซนตเมลดดของผลตภณฑขาวกลองทสดวยเครองสขาวกลองในแตละครงมคาโดยเฉลยอยระหวาง 84.29 % ถง 85.99% [4]
การแบงขนาดของโรงสขาว ศนยเทคโนโลยโลห ะและวสด แห งช าต ส าน ก งานพฒ น าวทยาศาสตร สวทช. ไดแบงตามก าลงผลตตอวนโดย โรงสขาวขนาดเลก < 100 ตน / วน โรงสขาวขนาดกลาง 100 – 200 ตน / วน โรงสขาวขนาดใหญ > 200 ตน / วน [5] ซงกลมชาวนาก าลงการผลตไมเกน 100 ตน / วน จงเหมาะกบโรงสขาวขนาดเลก
ดงนนคณะผวจย จงไดพฒนาเครองสขาวขาวขนาดเลก ทสามารถปรบอตราการปอนขาวเปลอกและควบคมความเรวรอบของมอเตอรได โดยคณะผ วจยไดใชวธพนผวตอบสนอง(Response surface method, RSM) เพอใหไดคาทเหมาะสมส าหรบเครองสขาวขาวขนาดเลก ซงวธพนผว
ตอบสนองเปนวธการทางคณตศาสตรและสถตทเปนประโยชนในการสรางแบบจ าลองและวเคราะหปญหาซงจะแสดงผลตอบสนองตอผลจากตวแปรตางๆ โดยมวตถประสงคเพอหาจดหาคาทดทสดหรอความเหมาะสมตอผลนน [6] ทงนว ธ RSM เปนเทคนคทมประสทธภาพกบกระบวนการทมความซบซอนท าใหงายในการจดการและการอธบายผลเมอเปรยบเทยบกบวธการอน [7] ซงเมอน าไปวเคราะหหาคาทเหมาะสมจากผลทไดจากการออกแบบการทดลองเชงแฟกทอเรยลแบบ 3k จะไดคาทดทสด [8]
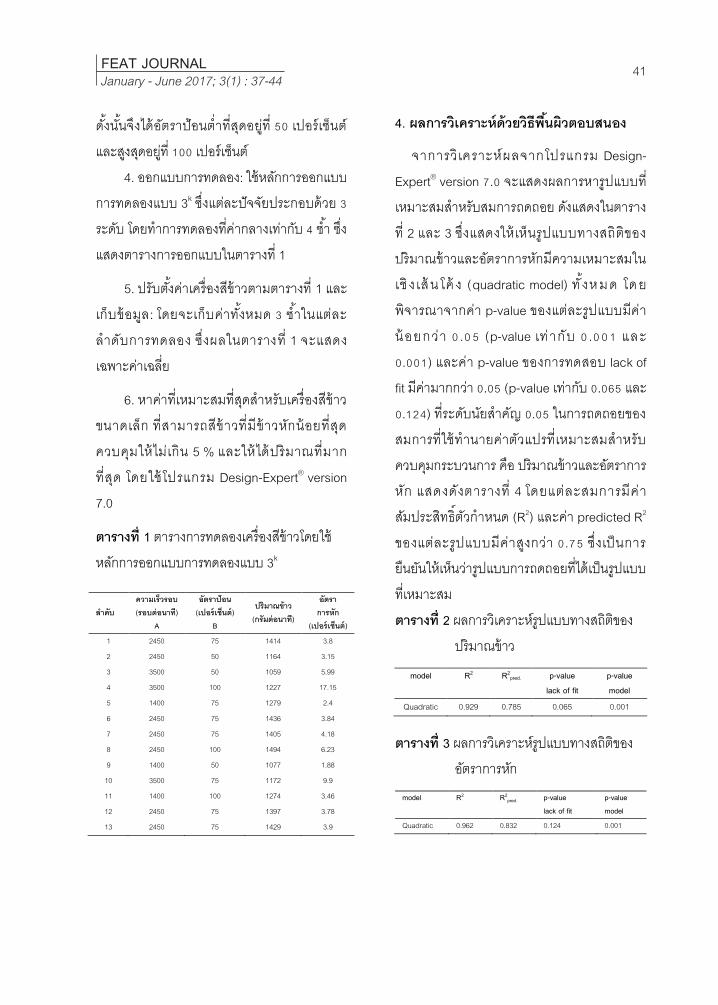
2. การสรางเครองสขาวขาวขนาดเลก ขนตอนการสรางเครองสขาวขาวขนาดเลก
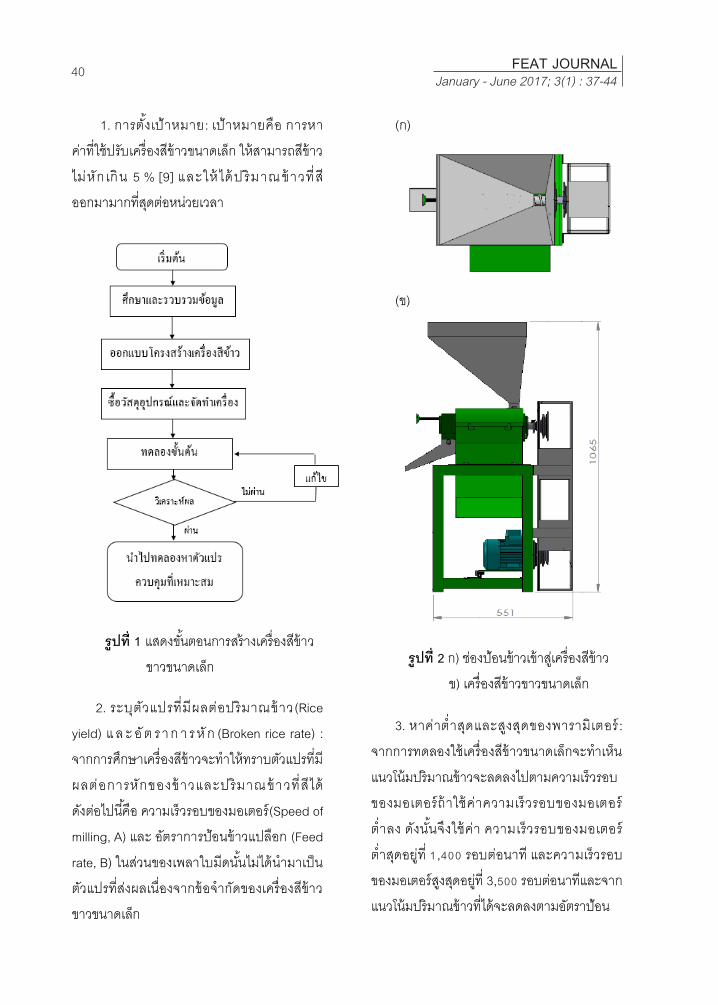
แสดงไดดงในรปท 1 หลกการท างานของเครองสขาวขาวขนาดเลก เมอมการจายไฟเขาสตวเครอง มอเตอรจะท าการขบเคลอนใหตวเพลาและใบมดทใชในการสขาวหมน ขาวเปลอกจะท าการปอนสตวเครอง ซงจะถกควบคมปรมาณขาวโดยลนกนขาวบรเวณชองจายขาวเปลอก ดงรปท 2 (ก)
ใบมดจะท าการกะเทาะเปลอกขาวออก ตะแกรงจะเปนตวคดแยกขาวสารด ขาวทหก ร าและแกลบ ออกจากตวเครองในชองทตางกน โดยเครองสขาวขาวนจะถกตดตงอปกรณควบคมความเรวรอบมอเตอร (Variable Speed Drive, VSD) และลมเพอควบคมอตราการปอนขาวเปลอก ซงเครองสขาวแสดงในรปท 2 (ข)
3. ขนตอนการท าการทดลอง
ในงานนแบงขนตอนในการท าการทดลองเปน 6 ขนตอน ซงจะแบงขนตอนดงน
39FEAT JOURNALJanuary - June 2017; 3(1) : 37-44
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp.
1. การตงเปาหมาย : เปาหมายคอ การหาคาทใชปรบเครองสขาวขนาดเลก ใหสามารถสขาวไมหก เกน 5 % [9] และให ไดป รมาณ ขาวท สออกมามากทสดตอหนวยเวลา
รปท 1 แสดงขนตอนการสรางเครองสขาว ขาวขนาดเลก
2. ระบตวแปรทมผลตอปรมาณขาว (Rice yield) แ ล ะ อ ต ร า ก า รห ก (Broken rice rate) : จากการศกษาเครองสขาวจะท าใหทราบตวแปรทมผลตอการหกของขาวและปรมาณขาวทส ไดดงตอไปนคอ ความเรวรอบของมอเตอร(Speed of milling, A) และ อตราการปอนขาวแปลอก (Feed rate, B) ในสวนของเพลาใบมดนนไมไดน ามาเปนตวแปรทสงผลเนองจากขอจ ากดของเครองสขาวขาวขนาดเลก
(ก)
(ข)
รปท 2 ก) ชองปอนขาวเขาสเครองสขาว ข) เครองสขาวขาวขนาดเลก
3. หาคาต าสดและสงสดของพารามเตอร : จากการทดลองใชเครองสขาวขนาดเลกจะท าเหนแนวโนมปรมาณขาวจะลดลงไปตามความเรวรอบ ของมอเตอรถาใชคาความเรวรอบของมอเตอรต าลง ดงนนจงใชคา ความเรวรอบของมอเตอรต าสดอยท 1,400 รอบตอนาท และความเรวรอบของมอเตอรสงสดอยท 3,500 รอบตอนาทและจากแนวโนมปรมาณขาวทไดจะลดลงตามอตราปอน
40 FEAT JOURNALJanuary - June 2017; 3(1) : 37-44
ดงนนจงไดอตราปอนต าทสดอยท 50 เปอรเซนต และสงสดอยท 100 เปอรเซนต 4. ออกแบบการทดลอง: ใชหลกการออกแบบการทดลองแบบ 3k ซงแตละปจจยประกอบดวย 3 ระดบ โดยท าการทดลองทคากลางเทากบ 4 ซ า ซงแสดงตารางการออกแบบในตารางท 1
5. ปรบตงคาเครองสขาวตามตารางท 1 และเกบขอมล: โดยจะเกบคาทงหมด 3 ซ าในแตละล าดบการทดลอง ซงผลในตารางท 1 จะแสดงเฉพาะคาเฉลย
6. หาคาทเหมาะสมทสดส าหรบเครองสขาวขนาดเลก ทสามารถสขาวทม ขาวหกนอยทสดควบคมใหไมเกน 5 % และใหไดปรมาณทมากทสด โดยใชโปรแกรม Design-Expert® version 7.0
ตารางท 1 ตารางการทดลองเครองสขาวโดยใชหลกการออกแบบการทดลองแบบ 3k
ล าดบ ความเรวรอบ (รอบตอนาท)
A
อตราปอน (เปอรเซนต)
B
ปรมาณขาว (กรมตอนาท)
อตรา การหก
(เปอรเซนต) 1 2450 75 1414 3.8 2 2450 50 1164 3.15 3 3500 50 1059 5.99 4 3500 100 1227 17.15 5 1400 75 1279 2.4 6 2450 75 1436 3.84 7 2450 75 1405 4.18 8 2450 100 1494 6.23 9 1400 50 1077 1.88
10 3500 75 1172 9.9 11 1400 100 1274 3.46 12 2450 75 1397 3.78 13 2450 75 1429 3.9
4. ผลการวเคราะหดวยวธพนผวตอบสนอง
จาการว เคราะหผลจากโปรแกรม Design-Expert® version 7.0 จะแสดงผลการหารปแบบทเหมาะสมส าหรบสมการถดถอย ดงแสดงในตารางท 2 และ 3 ซงแสดงใหเหนรปแบบทางสถตของปรมาณขาวและอตราการหกมความเหมาะสมในเช ง เส น โค ง (quadratic model) ท งหมด โด ยพจารณาจากคา p-value ของแตละรปแบบมคานอยกวา 0 .05 (p-value เท ากบ 0 .001 และ 0.001) และคา p-value ของการทดสอบ lack of fit มคามากกวา 0.05 (p-value เทากบ 0.065 และ 0.124) ทระดบนยส าคญ 0.05 ในการถดถอยของสมการทใชท านายคาตวแปรทเหมาะสมส าหรบควบคมกระบวนการ คอ ปรมาณขาวและอตราการหก แสดงดงตารางท 4 โดยแตละสมการมคาสมประสทธตวก าหนด (R2) และคา predicted R2 ของแตละรปแบบมคาสงกวา 0.75 ซงเปนการยนยนใหเหนวารปแบบการถดถอยทไดเปนรปแบบทเหมาะสม ตารางท 2 ผลการวเคราะหรปแบบทางสถตของ
ปรมาณขาว model R2 R2
pred. p-value lack of fit
p-value model
Quadratic 0.929 0.785 0.065 0.001
ตารางท 3 ผลการวเคราะหรปแบบทางสถตของอตราการหก
model R2 R2pred. p-value
lack of fit p-value model
Quadratic 0.962 0.832 0.124 0.001
41FEAT JOURNALJanuary - June 2017; 3(1) : 37-44
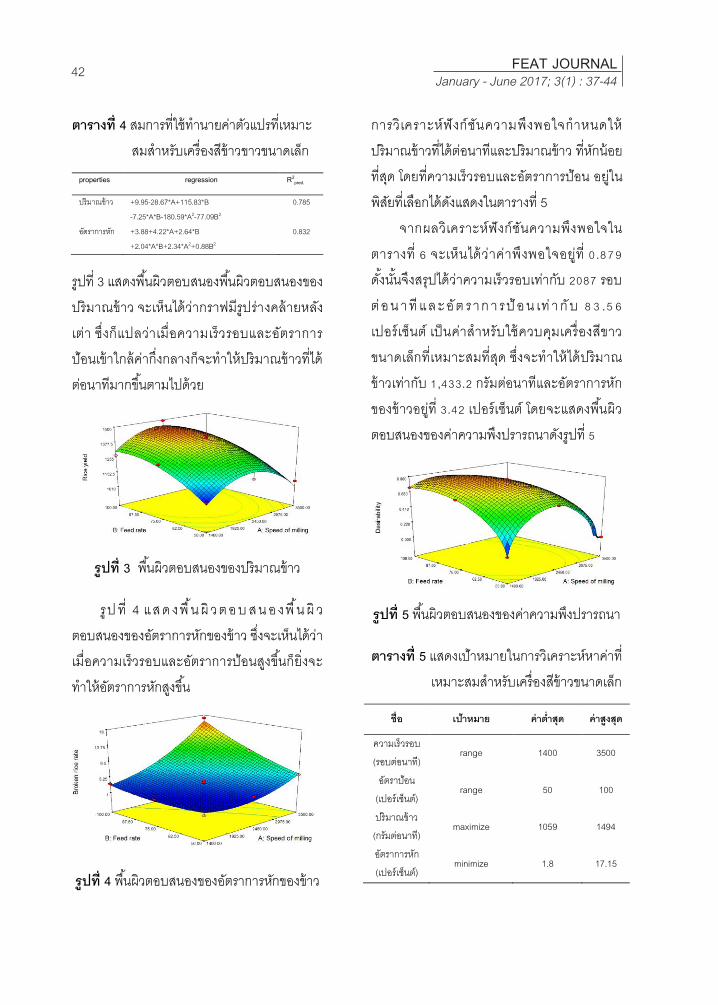
FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp. ตารางท 4 สมการทใชท านายคาตวแปรทเหมาะ
สมส าหรบเครองสขาวขาวขนาดเลก properties regression R2
pred.
ปรมาณขาว +9.95-28.67*A+115.83*B -7.25*A*B-180.59*A2-77.09B2
0.785
อตราการหก +3.88+4.22*A+2.64*B +2.04*A*B+2.34*A2+0.88B2
0.832
รปท 3 แสดงพนผวตอบสนองพนผวตอบสนองของปรมาณขาว จะเหนไดวากราฟมรปรางคลายหลงเตา ซงกแปลวาเมอความเรวรอบและอตราการปอนเขาใกลคากงกลางกจะท าใหปรมาณขาวทไดตอนาทมากขนตามไปดวย
รปท 3 พนผวตอบสนองของปรมาณขาว
รป ท 4 แสด งพ น ผ วตอบ สนอ งพ น ผ วตอบสนองของอตราการหกของขาว ซงจะเหนไดวาเมอความเรวรอบและอตราการปอนสงขนกยงจะท าใหอตราการหกสงขน
รปท 4 พนผวตอบสนองของอตราการหกของขาว
การวเคราะหฟงกชนความพงพอใจก าหนดใหปรมาณขาวทไดตอนาทและปรมาณขาว ทหกนอยทสด โดยทความเรวรอบและอตราการปอน อยในพสยทเลอกไดดงแสดงในตารางท 5 จากผลวเคราะหฟงกชนความพงพอใจในตารางท 6 จะเหนไดวาคาพงพอใจอยท 0.879 ดงนนจงสรปไดวาความเรวรอบเทากบ 2087 รอบต อน า ท และอต ราก า รป อ น เท า ก บ 8 3 .5 6 เปอรเซนต เปนคาส าหรบใชควบคมเครองสขาวขนาดเลกทเหมาะสมทสด ซงจะท าใหไดปรมาณขาวเทากบ 1,433.2 กรมตอนาทและอตราการหกของขาวอยท 3.42 เปอรเซนต โดยจะแสดงพนผวตอบสนองของคาความพงปรารถนาดงรปท 5
รปท 5 พนผวตอบสนองของคาความพงปรารถนา
ตารางท 5 แสดงเปาหมายในการวเคราะหหาคาท เหมาะสมส าหรบเครองสขาวขนาดเลก
ชอ เปาหมาย คาต าสด คาสงสด
ความเรวรอบ (รอบตอนาท)
range 1400 3500
อตราปอน (เปอรเซนต) range 50 100
ปรมาณขาว (กรมตอนาท) maximize 1059 1494
อตราการหก (เปอรเซนต) minimize 1.8 17.15
42 FEAT JOURNALJanuary - June 2017; 3(1) : 37-44
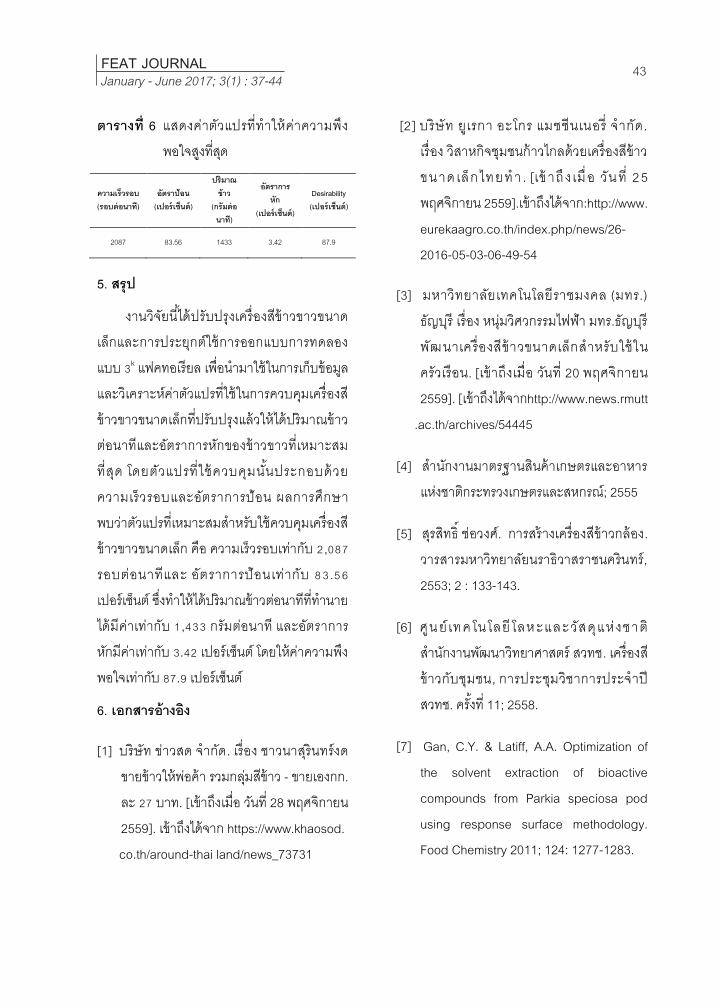
ตารางท 6 แสดงคาตวแปรทท าใหคาความพงพอใจสงทสด
ความเรวรอบ (รอบตอนาท)
อตราปอน (เปอรเซนต)
ปรมาณขาว
(กรมตอนาท)
อตราการหก
(เปอรเซนต)
Desirability (เปอรเซนต)
2087 83.56 1433 3.42 87.9
5. สรป
งานวจยนไดปรบปรงเครองสขาวขาวขนาดเลกและการประยกตใชการออกแบบการทดลองแบบ 3k แฟคทอเรยล เพอน ามาใชในการเกบขอมลและวเคราะหคาตวแปรทใชในการควบคมเครองสขาวขาวขนาดเลกทปรบปรงแลวใหไดปรมาณขาวตอนาทและอตราการหกของขาวขาวทเหมาะสมทสด โดยตวแปรทใชควบคมนนประกอบดวย ความเรวรอบและอตราการปอน ผลการศกษาพบวาตวแปรทเหมาะสมส าหรบใชควบคมเครองสขาวขาวขนาดเลก คอ ความเรวรอบเทากบ 2,087 รอบตอนาทและ อตราการปอนเทากบ 83.56 เปอรเซนต ซงท าใหไดปรมาณขาวตอนาททท านายไดมคาเทากบ 1,433 กรมตอนาท และอตราการหกมคาเทากบ 3.42 เปอรเซนต โดยใหคาความพงพอใจเทากบ 87.9 เปอรเซนต
6. เอกสารอางอง
[1] บรษท ขาวสด จ ากด. เรอง ชาวนาสรนทรงดขายขาวใหพอคา รวมกลมสขาว - ขายเองกก.ละ 27 บาท. [เขาถงเมอ วนท 28 พฤศจกายน 2559]. เขาถงไดจาก https://www.khaosod.
co.th/around-thai land/news_73731
[2] บรษท ยเรกา อะโกร แมชชนเนอร จ ากด. เรอง วสาหกจชมชนกาวไกลดวยเครองสขาว ขนาด เลก ไทยท า . [เข าถ ง เม อ วนท 2 5 พฤศจกายน 2559].เขาถงไดจาก:http://www. eurekaagro.co.th/index.php/news/26-2016-05-03-06-49-54
[3] มหาวทยาลยเทคโนโลยราชมงคล (มทร.) ธญบร เรอง หนมวศวกรรมไฟฟา มทร.ธญบร พฒนาเครองสขาวขนาดเลกส าหรบใชในครวเรอน. [เขาถงเมอ วนท 20 พฤศจกายน2559]. [เขาถงไดจากhttp://www.news.rmutt
.ac.th/archives/54445
[4] ส านกงานมาตรฐานสนคาเกษตรและอาหาร แหงชาตกระทรวงเกษตรและสหกรณ; 2555
[5] สรสทธ ชอวงศ. การสรางเครองสขาวกลอง. วารสารมหาวทยาลยนราธวาสราชนครนทร, 2553; 2 : 133-143.
[6] ศน ย เทค โนโลย โลหะและวสดแห งชาต ส านกงานพฒนาวทยาศาสตร สวทช. เครองสขาวกบชมชน, การประชมวชาการประจ าป สวทช. ครงท 11; 2558.
[7] Gan, C.Y. & Latiff, A.A. Optimization of the solvent extraction of bioactive compounds from Parkia speciosa pod using response surface methodology. Food Chemistry 2011; 124: 1277-1283.
43FEAT JOURNALJanuary - June 2017; 3(1) : 37-44

FEAT JOURNAL month-month, 2015; Vol.xx(No.xx):pp.-pp. [8] Montgomery, D.C. Design and Analysis
of Experiments. 5th ed. New York: John Wiley & Sons; 2001.
.
[9] Myers, R.H. and Montgomery. D.G. Response Surface Methodology. 2nd ed. New York: John Wiley & Sons; 2001
44 FEAT JOURNALJanuary - June 2017; 3(1) : 37-44

________________________________________________________________________________
________________________________________________________________________________ ผลกระทบของแผนกนกงหนทมผลตอประสทธภาพของกงหนพลงงานน าวนอสระ
The Effects of Turbine Baffle Plates on the Efficiency of Water Free Vortex Hydro Turbine
ปยะวฒน ศรธรรม, พงศกร วเชยร, ทรงศกด สวรรณศร และ รชพล สนตวรากร* Piyawat Sritram, Pongsakorn Wichian, Sogsak Suwansri and Ratchaphon Suntivarakorn*
ภาควชาวศวกรรมเครองกล คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน จงหวดขอนแกน 40002 Department of Mechanical Engineering, Faculty of Engineering, KhonKaen University, KhonKaen, Thailand 40002
Received: 10 ต.ค. 59 Accepted: 9 ก.พ. 60
บทคดยอ
งานวจยนมวตถประสงคเพอการศกษาการเพมประสทธภาพกงหนน าแบบน าวนอสระ ดวยวธการตดตงแผนปดกนใหแกใบพด โดยใชการจ าลองลกษณะการไหลดวยวธพลศาสตรของไหลเชงค านวณ (Computational Fluid Dynamics, CFD) รวมกบการทดสอบหาประสทธภาพการผลตไฟฟาจากการทดลองในหองปฏบตการ ซงก าหนดใหมการตดตงแผนปดกนกงหน 4 ขนาดตางกน ตรงพนทหนาตดของใบกงหน ตงแตขนาด 25%-100% โดยการทดลองในครงนไดใชกงหนทมขนาดเสนผานศนยกลาง 45 เซนตเมตร สง 32 เซนตเมตร จ านวน 5 ใบ ทดสอบทอตราการไหลของน าท 0.04-0.06 ลกบาศกเมตรตอวนาท จากการทดลองพบวา สดสวนพนทปดกนใบพดเทากบ 50% จะใหคาประสทธภาพสงสดคอ 43.83% และสงกวากรณทไมมแผนกน 6.59% โดยอตราการไหลทเพมขนจะท าใหประสทธภาพของระบบเพมขนดวย
ค าส าคญ : แผนกน,กงหนน าวนอสระ, ประสทธภาพของกงหน, วธพลศาสตรของไหลเชงค านวณ
Abstract
The purpose of this research was to study that focuses on increasing the efficiency of the water free vortex turbine by installing baffle plates on the blades. The simulation of flow with the Computational
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
45FEAT JOURNALJanuary - June 2017; 3(1) : 45-52
Fluid Dynamics (CFD) program. In conjunction with test for the efficiency of electricity production by laboratory experiments. This requires the installation of a turbine baffle plates four different sizes. At this cross-sectional area of the turbine blades ranging from 25%-100%. In this experiment, the turbine has a diameter of 45 cm, a height of 32 cm and a 5 blades. Test at the water flow rate of 0.04-0.06 m3/s. From the experiment, the blades with a 50% baffle plate proportion are the most effective at 43.83% and higher in the absence of baffles 6.59%. Furthermore, when the flow rate increases it will increase the efficiency of the system.
Keywords: Plates, Free Vortex Turbine, Turbine Efficiency, Computational Fluid Dynamics (CFD)
_________________________________________________________________________________ *ตดตอ: อเมล : [email protected], โทรศพท : 043-202845,โทรสาร : 043-202849 1. บทน า
น าเปนทรพยากรธรรมชาตทมศกยภาพสงทใชน ามาผลตเปนพลงงานไฟฟาโดยน า เ ปนแหลงพลงงานทสะอาดไมกอมลพษสสงแวดลอม แตอยางไรกตามการผลตพลงงานไฟฟาดวยน านนจ าเปนตองท าการสรางเขอนกนน าขนาดใหญ ซงการสรางเขอนขนาดใหญนนจะเปนการสรางผลกระทบตอสงแวดลอมในธรรมชาต ดงนนการผลตไฟฟาจากแหลงน าขนาดเลกหรอแมน า ล าธารมน าไหลผานตลอดป จงเปนทางเลอกหนงทไดรบความสนใจในการผลตไฟฟาจากพลงงานน าในปจจบน โดยแนวทางในการผลตไฟฟาจากแหลงน าขนาดเลกมแนวทางในการผลตอย 2 แนวทาง คอ วธการบายพาส (Bypass Method) คอ การเบยงน าจากคลองสงน าหลกเขามาสระบบผลตกระแสไฟฟาทสรางขนและวธการตดตงในคลอง (Open Canal Method) คอ การตดตงชดเครองก าเนดไฟฟาขวางคลองสงน าโดยตรง โดยทไมจ าเปนตองมโครงสรางใดๆ เพมเตมซงในปจจบนมคณะผวจยตางไดท าการศกษาวธการผลตไฟฟาจาก
แหลงน าขนาดเลกมากมาย อาท Wanchat and Suntivarakorn ไดท าการศกษาเพอออกแบบระบบผลตไฟฟาจากพลงงานน าวนอสระ โดยผลการศกษาไ ด ท า ก า ร อ อก แบบบ อ น า ว น ท ม ร ป ร า ง เ ป นทรงกระบอกและมรอยกนบอ ซงมการก าหนดใหน าไหลเขามายงบอน าในแนว แนวสมผส (Tangential) เพอใหเกดการไหลทมลกษณะหมนวนคลายทอรนาโด นอกจากนนยงไดท าการออกแบบกงหนน าทเหมาะสมมาวางขวางลงมาในบอเพอการผลตพลงงานไฟฟา [1] นอกจากน Shabara et al. ไดท าการศกษาตวแปรตางๆทส าคญทสงผลกระทบตอการผลตไฟฟาจากพลงงานน าวนอสระดวยวธพลศาสตรของไหลเชงค านวณซงผลการศกษาพบวา ทอตราการไหลสงสดจะใหคาประสทธภาพเทากบ 40% ทอตราความเรวรอบ 28 และ 38 รอบตอนาท [2] ซงสอดคลองกบผลการศกษาของ Wanchat et al. ทไดประสทธภาพในการผลตไฟฟาสงสดท 35% ทความเรวรอบของกงหนเทากบ 40 รอบตอนาท [3] โดยนอกจากจะมผวจยทท าการศกษาเกยวกบตวแปรทสงผลกระทบตอ
46 FEAT JOURNALJanuary - June 2017; 3(1) : 45-52
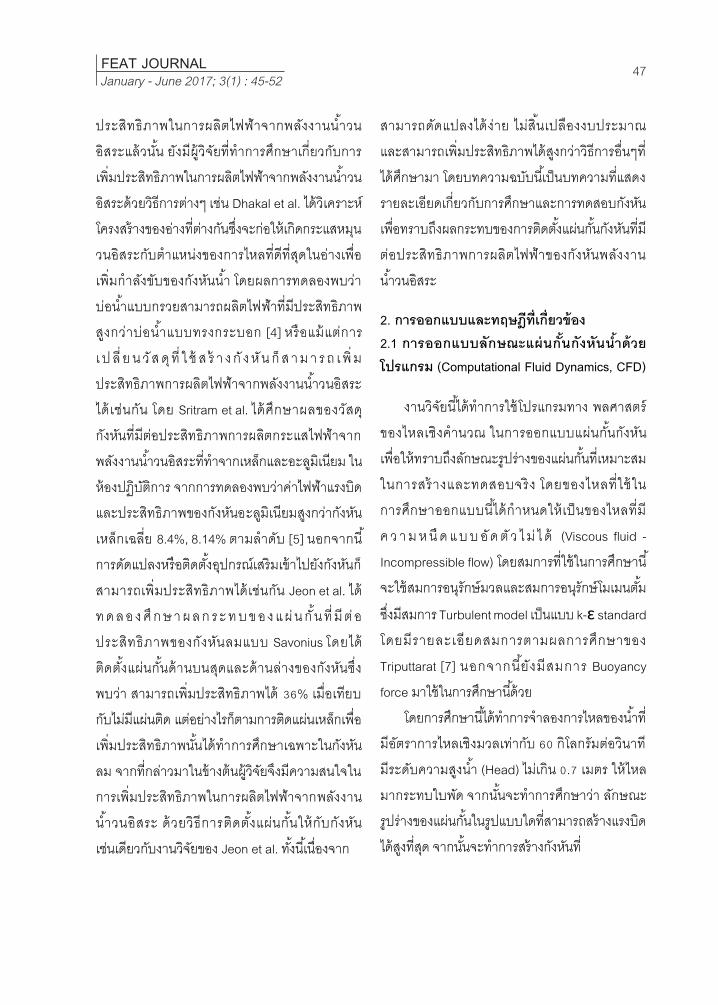
ประสทธภาพในการผลตไฟฟาจากพลงงานน าวนอสระแลวนน ยงมผ วจยทท าการศกษาเกยวกบการเพมประสทธภาพในการผลตไฟฟาจากพลงงานน าวนอสระดวยวธการตางๆ เชน Dhakal et al. ไดวเคราะหโครงสรางของอางทตางกนซงจะกอใหเกดกระแสหมนวนอสระกบต าแหนงของการไหลทดทสดในอางเพอเพมก าลงขบของกงหนน า โดยผลการทดลองพบวา บอน าแบบกรวยสามารถผลตไฟฟาทมประสทธภาพสงกวาบอน าแบบทรงกระบอก [4] หรอแมแตการเ ป ล ย น ว ส ด ท ใ ช ส ร า ง ก ง ห น ก ส า ม า ร ถ เ พ มประสทธภาพการผลตไฟฟาจากพลงงานน าวนอสระไดเชนกน โดย Sritram et al. ไดศกษาผลของวสดกงหนทมตอประสทธภาพการผลตกระแสไฟฟาจากพลงงานน าวนอสระทท าจากเหลกและอะลมเนยม ในหองปฏบตการ จากการทดลองพบวาคาไฟฟาแรงบดและประสทธภาพของกงหนอะลมเนยมสงกวากงหนเหลกเฉลย 8.4%, 8.14% ตามล าดบ [5] นอกจากน การดดแปลงหรอตดตงอปกรณเสรมเขาไปยงกงหนกสามารถเพมประสทธภาพไดเชนกน Jeon et al. ไดท ด ลอ ง ศ กษ า ผลก ร ะ ทบข อ ง แผ น ก น ท ม ต อประสทธภาพของกงหนลมแบบ Savonius โดยไดตดตงแผนกนดานบนสดและดานลางของกงหนซงพบวา สามารถเพมประสทธภาพได 36% เมอเทยบกบไมมแผนตด แตอยางไรกตามการตดแผนเหลกเพอเพมประสทธภาพนนไดท าการศกษาเฉพาะในกงหนลม จากทกลาวมาในขางตนผวจยจงมความสนใจในการเพมประสทธภาพในการผลตไฟฟาจากพลงงานน าวนอสระ ดวยวธการตดตงแผนกนใหกบกงหน เชนเดยวกบงานวจยของ Jeon et al. ทงนเนองจาก
สามารถดดแปลงไดงาย ไมสนเปลองงบประมาณ และสามารถเพมประสทธภาพไดสงกวาวธการอนๆทไดศกษามา โดยบทความฉบบนเปนบทความทแสดงรายละเอยดเกยวกบการศกษาและการทดสอบกงหนเพอทราบถงผลกระทบของการตดตงแผนกนกงหนทมตอประสทธภาพการผลตไฟฟาของกงหนพลงงานน าวนอสระ
2. การออกแบบและทฤษฎทเกยวของ 2.1 การออกแบบลกษณะแผนกนกงหนน าดวยโปรแกรม (Computational Fluid Dynamics, CFD)
งานวจยนไดท าการใชโปรแกรมทาง พลศาสตรของไหลเชงค านวณ ในการออกแบบแผนกนกงหนเพอใหทราบถงลกษณะรปรางของแผนกนทเหมาะสมในการสรางและทดสอบจรง โดยของไหลทใชในการศกษาออกแบบนไดก าหนดใหเปนของไหลทมค ว า ม ห น ด แ บบ อ ด ต ว ไ ม ไ ด (Viscous fluid - Incompressible flow) โดยสมการทใชในการศกษาน จะใชสมการอนรกษมวลและสมการอนรกษโมเมนตม ซงมสมการ Turbulent model เปนแบบ k-ɛ standard โดยมรายละเอยดสมการตามผลการศกษาของ Triputtarat [7] นอกจากน ยงมสมการ Buoyancy force มาใชในการศกษานดวย โดยการศกษานไดท าการจ าลองการไหลของน าทมอตราการไหลเชงมวลเทากบ 60 กโลกรมตอวนาท มระดบความสงน า (Head) ไมเกน 0.7 เมตร ใหไหลมากระทบใบพด จากนนจะท าการศกษาวา ลกษณะรปรางของแผนกนในรปแบบใดทสามารถสรางแรงบดไดสงทสด จากนนจะท าการสรางกงหนท
47FEAT JOURNALJanuary - June 2017; 3(1) : 45-52
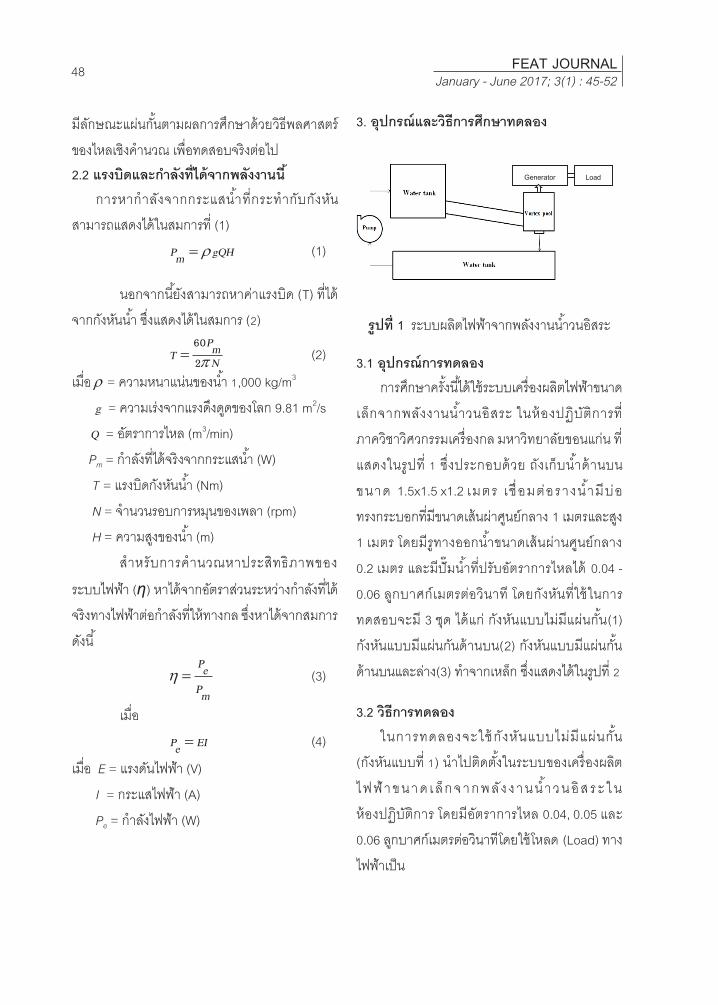
Generator Load
มลกษณะแผนกนตามผลการศกษาดวยวธพลศาสตรของไหลเชงค านวณ เพอทดสอบจรงตอไป 2.2 แรงบดและก าลงทไดจากพลงงานน การหาก าลงจากกระแสน าทกระท ากบกงหนสามารถแสดงไดในสมการท (1) P gQHm (1)
นอกจากนยงสามารถหาคาแรงบด (T) ทไดจากกงหนน า ซงแสดงไดในสมการ (2)
602PmT N (2)
เมอ = ความหนาแนนของน า 1,000 kg/m3 g = ความเรงจากแรงดงดดของโลก 9.81 m2/s Q = อตราการไหล (m3/min) Pm = ก าลงทไดจรงจากกระแสน า (W) T = แรงบดกงหนน า (Nm) N = จ านวนรอบการหมนของเพลา (rpm) H = ความสงของน า (m) ส าหรบการค านวณหาประสทธภาพของระบบไฟฟา (η) หาไดจากอตราสวนระหวางก าลงทไดจรงทางไฟฟาตอก าลงทใหทางกล ซงหาไดจากสมการดงน
PePm
(3)
เมอ P EIe (4) เมอ E = แรงดนไฟฟา (V) I = กระแสไฟฟา (A) Pe = ก าลงไฟฟา (W)
3. อปกรณและวธการศกษาทดลอง
รปท 1 ระบบผลตไฟฟาจากพลงงานน าวนอสระ
3.1 อปกรณการทดลอง การศกษาครงนไดใชระบบเครองผลตไฟฟาขนาดเลกจากพลงงานน าวนอสระ ในหองปฏบตการทภาควชาวศวกรรมเครองกล มหาวทยาลยขอนแกน ทแสดงในรปท 1 ซงประกอบดวย ถงเกบน าดานบนขนาด 1.5x1.5 x1.2 เมตร เ ช อมตอรางน ามบอทรงกระบอกทมขนาดเสนผาศนยกลาง 1 เมตรและสง 1 เมตร โดยมรทางออกน าขนาดเสนผานศนยกลาง 0.2 เมตร และมปมน าทปรบอตราการไหลได 0.04 - 0.06 ลกบาศกเมตรตอวนาท โดยกงหนทใชในการทดสอบจะม 3 ชด ไดแก กงหนแบบไมมแผนกน(1) กงหนแบบมแผนกนดานบน(2) กงหนแบบมแผนกนดานบนและลาง(3) ท าจากเหลก ซงแสดงไดในรปท 2
3.2 วธการทดลอง ในการทดลองจะใชกงหนแบบไมมแผนกน (กงหนแบบท 1) น าไปตดตงในระบบของเครองผลตไฟฟ า ขนาด เล ก จ ากพลง ง านน า ว น อส ร ะ ใ นหองปฏบตการ โดยมอตราการไหล 0.04, 0.05 และ 0.06 ลกบาศกเมตรตอวนาทโดยใชโหลด (Load) ทางไฟฟาเปน
48 FEAT JOURNALJanuary - June 2017; 3(1) : 45-52
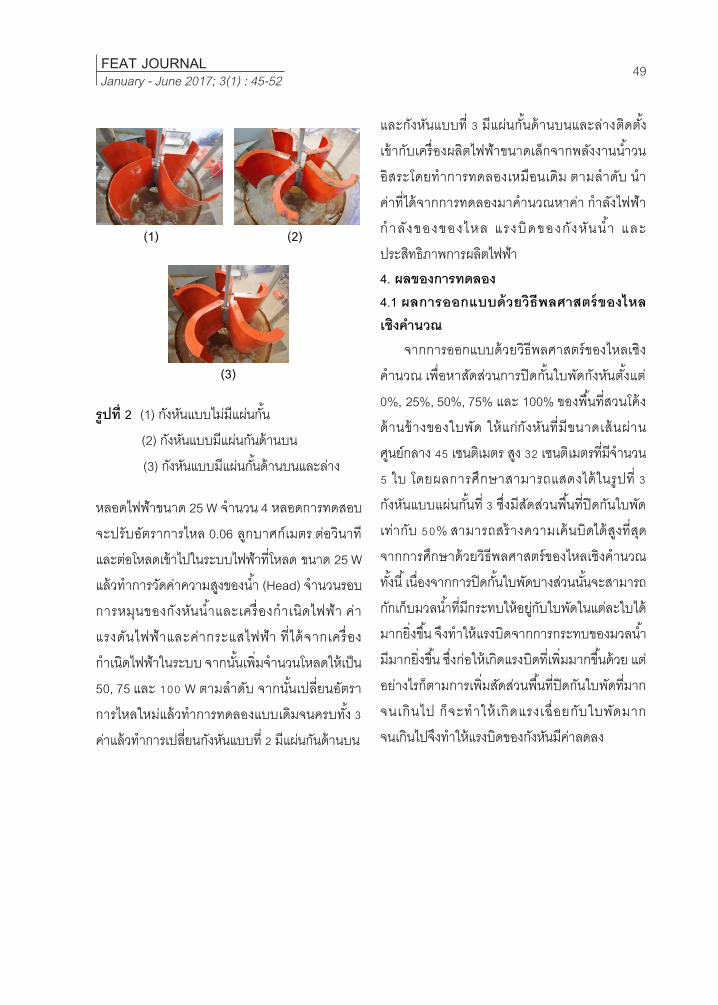
(1) (2)
(3)
รปท 2 (1) กงหนแบบไมมแผนกน (2) กงหนแบบมแผนกนดานบน (3) กงหนแบบมแผนกนดานบนและลาง
หลอดไฟฟาขนาด 25 W จ านวน 4 หลอดการทดสอบจะปรบอตราการไหล 0.06 ลกบาศกเมตร ตอวนาท และตอโหลดเขาไปในระบบไฟฟาทโหลด ขนาด 25 W แลวท าการวดคาความสงของน า (Head) จ านวนรอบการหมนของกงหนน าและเครองก าเนดไฟฟา คาแรงดนไฟฟาและคากระแสไฟฟา ทไดจากเครองก าเนดไฟฟาในระบบ จากนนเพมจ านวนโหลดใหเปน 50, 75 และ 100 W ตามล าดบ จากนนเปลยนอตราการไหลใหมแลวท าการทดลองแบบเดมจนครบทง 3 คาแลวท าการเปลยนกงหนแบบท 2 มแผนกนดานบน
และกงหนแบบท 3 มแผนกนดานบนและลางตดตงเขากบเครองผลตไฟฟาขนาดเลกจากพลงงานน าวนอสระโดยท าการทดลองเหมอนเดม ตามล าดบ น าคาทไดจากการทดลองมาค านวณหาคา ก าลงไฟฟา ก าลงของของไหล แรงบดของกงหนน า และประสทธภาพการผลตไฟฟา 4. ผลของการทดลอง 4.1 ผลการออกแบบดวยวธพลศาสตรของไหลเชงค านวณ จากการออกแบบดวยวธพลศาสตรของไหลเชงค านวณ เพอหาสดสวนการปดกนใบพดกงหนตงแต 0%, 25%, 50%, 75% และ 100% ของพนทสวนโคงดานขางของใบพด ใหแกกงหนทมขนาดเสนผานศนยกลาง 45 เซนตเมตร สง 32 เซนตเมตรทมจ านวน 5 ใบ โดยผลการศกษาสามารถแสดงไดในรปท 3 กงหนแบบแผนกนท 3 ซงมสดสวนพนทปดกนใบพดเทากบ 50% สามารถสรางความเคนบดไดสงทสดจากการศกษาดวยวธพลศาสตรของไหลเชงค านวณทงน เนองจากการปดกนใบพดบางสวนนนจะสามารถกกเกบมวลน าทมกระทบใหอยกบใบพดในแตละใบไดมากยงขน จงท าใหแรงบดจากการกระทบของมวลน ามมากยงขน ซงกอใหเกดแรงบดทเพมมากขนดวย แตอยางไรกตามการเพมสดสวนพนทปดกนใบพดทมากจนเกนไป กจะท าใหเกดแรงเฉอยกบใบพดมากจนเกนไปจงท าใหแรงบดของกงหนมคาลดลง
49FEAT JOURNALJanuary - June 2017; 3(1) : 45-52
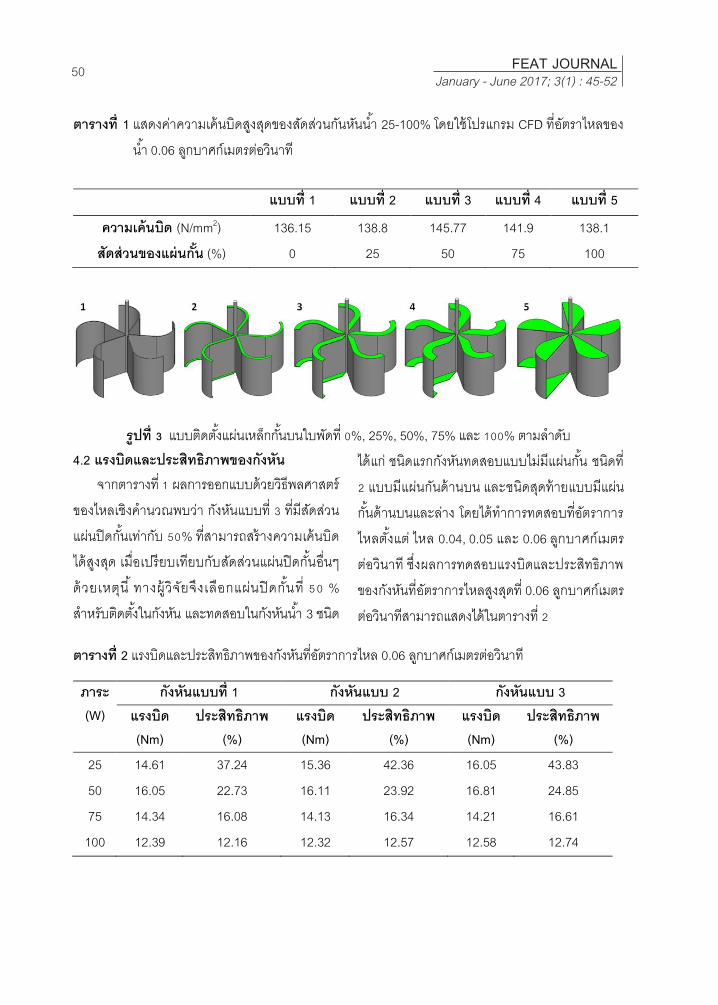
ตารางท 1 แสดงคาความเคนบดสงสดของสดสวนกนหนน า 25-100% โดยใชโปรแกรม CFD ทอตราไหลของน า 0.06 ลกบาศกเมตรตอวนาท
รปท 3 แบบตดตงแผนเหลกกนบนใบพดท 0%, 25%, 50%, 75% และ 100% ตามล าดบ 4.2 แรงบดและประสทธภาพของกงหน จากตารางท 1 ผลการออกแบบดวยวธพลศาสตรของไหลเชงค านวณพบวา กงหนแบบท 3 ทมสดสวนแผนปดกนเทากบ 50% ทสามารถสรางความเคนบดไดสงสด เมอเปรยบเทยบกบสดสวนแผนปดกนอนๆ ดวยเหตน ทางผ วจยจงเลอกแผนปดกนท 50 % ส าหรบตดตงในกงหน และทดสอบในกงหนน า 3 ชนด
ไดแก ชนดแรกกงหนทดสอบแบบไมมแผนกน ชนดท 2 แบบมแผนกนดานบน และชนดสดทายแบบมแผนกนดานบนและลาง โดยไดท าการทดสอบทอตราการไหลตงแต ไหล 0.04, 0.05 และ 0.06 ลกบาศกเมตรตอวนาท ซงผลการทดสอบแรงบดและประสทธภาพของกงหนทอตราการไหลสงสดท 0.06 ลกบาศกเมตรตอวนาทสามารถแสดงไดในตารางท 2
ตารางท 2 แรงบดและประสทธภาพของกงหนทอตราการไหล 0.06 ลกบาศกเมตรตอวนาท
แบบท 1 แบบท 2 แบบท 3 แบบท 4 แบบท 5 ความเคนบด (N/mm2) 136.15 138.8 145.77 141.9 138.1
สดสวนของแผนกน (%) 0 25 50 75 100
ภาระ (W)
กงหนแบบท 1 กงหนแบบ 2 กงหนแบบ 3 แรงบด(Nm)
ประสทธภาพ (%)
แรงบด (Nm)
ประสทธภาพ (%)
แรงบด(Nm)
ประสทธภาพ (%)
25 14.61 37.24 15.36 42.36 16.05 43.83 50 16.05 22.73 16.11 23.92 16.81 24.85 75 14.34 16.08 14.13 16.34 14.21 16.61
100 12.39 12.16 12.32 12.57 12.58 12.74
50 FEAT JOURNALJanuary - June 2017; 3(1) : 45-52
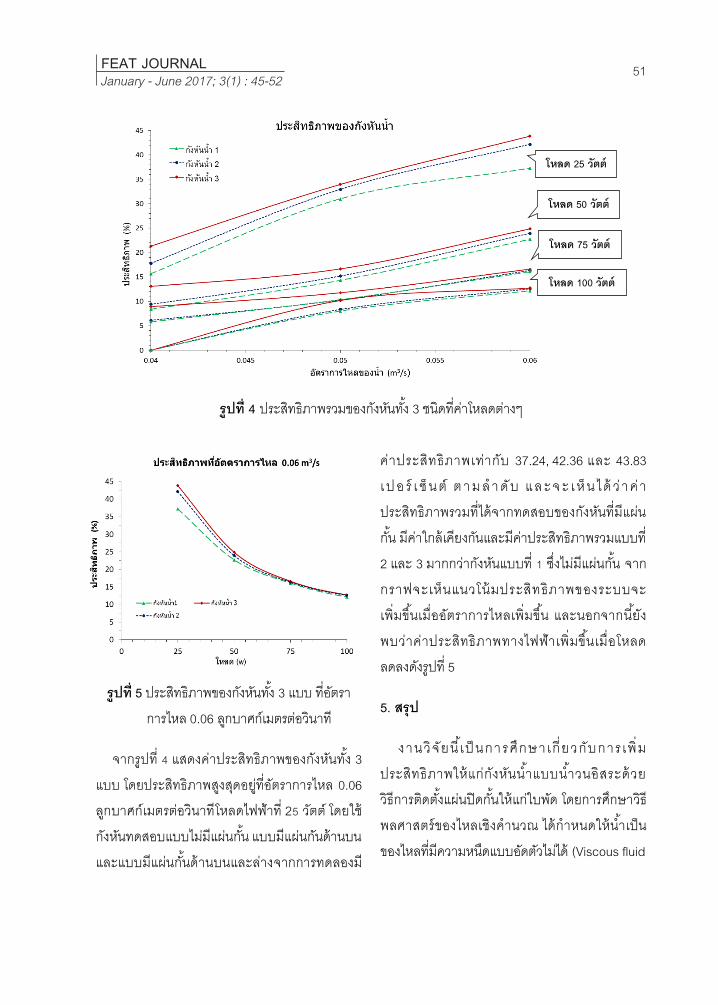
รปท 4 ประสทธภาพรวมของกงหนทง 3 ชนดทคาโหลดตางๆ
รปท 5 ประสทธภาพของกงหนทง 3 แบบ ทอตรา การไหล 0.06 ลกบาศกเมตรตอวนาท
จากรปท 4 แสดงคาประสทธภาพของกงหนทง 3 แบบ โดยประสทธภาพสงสดอยทอตราการไหล 0.06 ลกบาศกเมตรตอวนาทโหลดไฟฟาท 25 วตต โดยใชกงหนทดสอบแบบไมมแผนกน แบบมแผนกนดานบน และแบบมแผนกนดานบนและลางจากการทดลองม
คาประสทธภาพเทากบ 37.24, 42.36 และ 43.83 เ ป อ ร เ ซ น ต ต ามล า ดบ แ ละจ ะ เ ห น ไ ด ว า ค าประสทธภาพรวมทไดจากทดสอบของกงหนทมแผนกน มคาใกลเคยงกนและมคาประสทธภาพรวมแบบท 2 และ 3 มากกวากงหนแบบท 1 ซงไมมแผนกน จากกราฟจะเหนแนวโนมประสทธภาพของระบบจะเพมขนเมออตราการไหลเพมขน และนอกจากนยงพบวาคาประสทธภาพทางไฟฟาเพมขนเมอโหลดลดลงดงรปท 5
5. สรป
งานว จย น เ ปนการศกษา เ กยวกบการ เพ มประสทธภาพใหแกกงหนน าแบบน าวนอสระดวยวธการตดตงแผนปดกนใหแกใบพด โดยการศกษาวธพลศาสตรของไหลเชงค านวณ ไดก าหนดใหน าเปนของไหลทมความหนดแบบอดตวไมได (Viscous fluid
โหลด 25 วตต
โหลด 50 วตต
โหลด 75 วตต
โหลด 100 วตต
51FEAT JOURNALJanuary - June 2017; 3(1) : 45-52
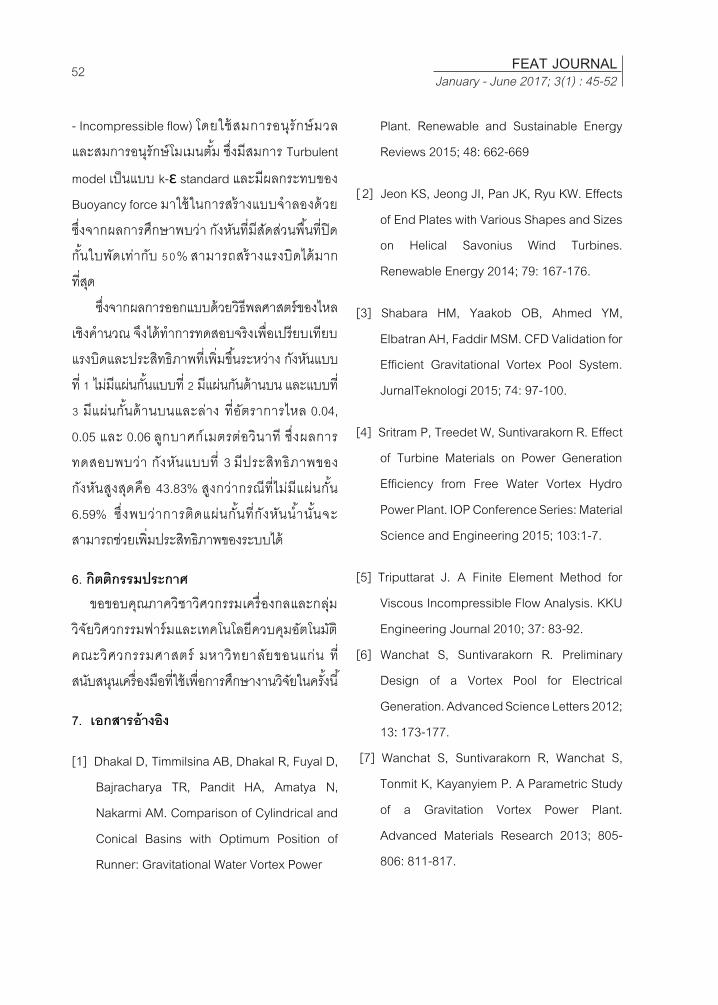
- Incompressible flow) โดยใชสมการอนรกษมวลและสมการอนรกษโมเมนตม ซงมสมการ Turbulent model เปนแบบ k-ɛ standard และมผลกระทบของ Buoyancy force มาใชในการสรางแบบจ าลองดวย ซงจากผลการศกษาพบวา กงหนทมสดสวนพนทปดกนใบพดเทากบ 50% สามารถสรางแรงบดไดมากทสด ซงจากผลการออกแบบดวยวธพลศาสตรของไหลเชงค านวณ จงไดท าการทดสอบจรงเพอเปรยบเทยบแรงบดและประสทธภาพทเพมขนระหวาง กงหนแบบท 1 ไมมแผนกนแบบท 2 มแผนกนดานบน และแบบท 3 มแผนกนดานบนและลาง ทอตราการไหล 0.04, 0.05 และ 0.06 ลกบาศกเมตรตอวนาท ซงผลการทดสอบพบวา กงหนแบบท 3 มประสทธภาพของกงหนสงสดคอ 43.83% สงกวากรณทไมมแผนกน 6.59% ซงพบวาการตดแผนกนทกงหนน านนจะสามารถชวยเพมประสทธภาพของระบบได
6. กตตกรรมประกาศ ขอขอบคณภาควชาวศวกรรมเครองกลและกลมวจยวศวกรรมฟารมและเทคโนโลยควบคมอตโนมต คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน ทสนบสนนเครองมอทใชเพอการศกษางานวจยในครงน
7. เอกสารอางอง
[1] Dhakal D, Timmilsina AB, Dhakal R, Fuyal D, Bajracharya TR, Pandit HA, Amatya N, Nakarmi AM. Comparison of Cylindrical and Conical Basins with Optimum Position of Runner: Gravitational Water Vortex Power
Plant. Renewable and Sustainable Energy Reviews 2015; 48: 662-669
[ 2] Jeon KS, Jeong JI, Pan JK, Ryu KW. Effects of End Plates with Various Shapes and Sizes on Helical Savonius Wind Turbines. Renewable Energy 2014; 79: 167-176.
[3] Shabara HM, Yaakob OB, Ahmed YM, Elbatran AH, Faddir MSM. CFD Validation for Efficient Gravitational Vortex Pool System. JurnalTeknologi 2015; 74: 97-100.
[4] Sritram P, Treedet W, Suntivarakorn R. Effect of Turbine Materials on Power Generation Efficiency from Free Water Vortex Hydro Power Plant. IOP Conference Series: Material Science and Engineering 2015; 103:1-7.
[5] Triputtarat J. A Finite Element Method for Viscous Incompressible Flow Analysis. KKU Engineering Journal 2010; 37: 83-92.
[6] Wanchat S, Suntivarakorn R. Preliminary Design of a Vortex Pool for Electrical Generation. Advanced Science Letters 2012; 13: 173-177.
[7] Wanchat S, Suntivarakorn R, Wanchat S, Tonmit K, Kayanyiem P. A Parametric Study of a Gravitation Vortex Power Plant. Advanced Materials Research 2013; 805-806: 811-817.
52 FEAT JOURNALJanuary - June 2017; 3(1) : 45-52

_________________________________________________________________________________
_________________________________________________________________________________ การประเมนการปลดปลอยมลพษจากการเผาไหมฟางขาวในทโลงแจง
Assessment of Pollutant Emission from Open Field Burning of Rice Straw กตตยาภรณ รองเมอง, วรชย อาจหาญ*, พรรษา ลบลบ, และ ทพยสภนทร หนซย
Kittiyaporn Rongmuang, Weerachai Arjharn*, Pansa Liplap, and Thipsuphin Hinsui สาขาวชาวศวกรรมเกษตร ส านกวชาวศวกรรมศาสตร มหาวทยาลยเทคโนโลยสรนาร จงหวดนครราชสมา
ศนยความเปนเลศทางดานชวมวล ส านกวชาวศวกรรมศาสตร มหาวทยาลยเทคโนโลยสรนาร จงหวดนครราชสมา
School of Agricultural Engineering, Institute of Engineering, Suranaree University of Technology, Nakhon Ratchasima Center of Excellent in Biomass, Institute of Engineering, Suranaree University of Technology, Nakhon Ratchasima
Received: 7 พ.ย. 59 Accepted: 9 ก.พ. 60
บทคดยอ
เกษตรกรสวนใหญจะเผาก าจดฟางขาวในแปลงกอนเรมด าเนนการปลกในฤดตอไป ท าใหมการปลดปลอยมลพษสสงแวดลอมในประมาณทมหาศาล ในงานวจยนมวตถประสงคเพอศกษาอตราการปลดปลอยมลพษ (Emission Factors : EFs) จากการเผาไหมเศษฟางขาว โดยการทดสอบหาการปลดปลอยมลพษตาง ๆ ไดแก กาซคารบอนไดออกไซด (CO2) กาซคารบอนมอนอกไซด (CO) กาซออกไซดของไนโตรเจน (NOX) กาซซลเฟอรไดออกไซด (SO2) และฝ นละอองรวม (Total Particulate Matter : TPM) ในระดบหองปฏบตการและน าผลทไดมาประเมนปรมาณการปลดปลอยมลพษจากการเผาไหมฟางขาวในพนทการปลกของประเทศ ผลการศกษาพบวา อตราการปลดปลอยมลพษ (EFs) จากการเผาเศษฟางขาว โดยมชวงการปลดปลอย CO2 CO NOX SO2 และฝ นละอองรวม เทากบ 1,118 78.86 1.44 0.56 6.69 g/kgdm ตามล าดบ เมอน าอตราการปลดปลอยมลพษเหลานมาประเมนการปลดปลอยมลพษของประเทศ พบวา ฟางขาวมอตราการปลดปลอยมลพษ 246.35 17.37 0.31 0.12 147.35 แสนตน/ป ตามล าดบ ผลทไดจากงานวจยนสามารถน าไปประกอบในการก าหนดนโยบายควบคมการเผาไหมในทโลงแจงของฟางขาวได
ค าส าคญ : ฟางขาว การเผาในทโลง อตราการปลดปลอยมลพษ
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
53FEAT JOURNALJanuary - June 2017; 3(1) : 53-61
Abstract
Farmer usually burn rice straw left on the field prior to starting a new crop, emitting a great amount of pollutants to the environment. The objective of this research was to determine emission factors (EFs) of main agricultural residues during open field burning, including rice straw, corncob and sugarcane tip/ leave.The pollutants consisting of carbon dioxide (CO2,carbon monoxide (CO) , nitrogen oxide (NOX), sulfur dioxide (SO2) and total particulate matter (TPM) were measure to assess emissions in the laboratory which were subsequently used to estimate the amount of pollutant emissions from open field burning of rice straw in Thailand. The results showed that the EFs of the 3 agricultural residues varied differently depending on their characteristics. The emissions of CO2, CO, NOX, SO2 were 1,118 78.86 1.44 0.56 6.69 g/kgdm, respectively. The EFs of open burning of rice straw were 246.35 17.37 0.31 0.12 147.35, respectively. The results of this study can be further used to make policy regarding the control of open field burning of rice straw.
Keywords : rice straw, open field burning, emission factor (EF) ___________________________________________________________________ *ตดตอ: อเมล : [email protected] โทรศพท : 044-225007, โทรสาร : 044 225046 1. บทน า
การเผาไหมในทโลงแจง (Open Burning) อาท การเกดไฟปา การเผาในพนททางการเกษตร และการเผาขยะ ลวนเปนแหลงก าเนดมลพษทางอากาศทส าคญ ซงกอใหเกดกาซตาง ๆ จากกระบวนการเผาไ ห ม อ า ท ค า ร บ อ น ม อ น อ ก ไ ซ ด ( CO) คารบอนไดออกไซด (CO2) ออกไซดของไนโตรเจน (NOx) ซล เฟอรไดออกไซด (SO2) องคประกอบสารอนทรยระเหย (VOCs) รวมทงฝ นละอองรวม (Total Particulate Matter : TPM) เถ า (Ash) ควนและเขมา (Smoke) การเผาในทโลงแจงในบรเวณกวาง จะน าไปสการเกดหมอกควนในปรมาณสง ซงลวนแตมผลกระทบตอสขภาพอนามยของมนษย สงมชวตในระบบนเวศ และสงแวดลอม
จากรายงานสถานการณมลพษทางอากาศของประเทศไทย ในป 2554 โดยกรมควบคมมลพษ [1] ไดประเมนวาการเผาในทโลงแจงในพนทเกษตรของประเทศไทย เปนแหลงก าเนดมลพษเชงพนททส าคญแหลงหนง ซงมาจากกจกรรมหลก คอ การเผาเศษวสดเหลอใชในพนทเกษตรกรรม โดยเฉพาะอยางยงพนท เพาะปลกพชเศรษฐกจทส าคญของประเทศ ไดแก ขาว ขาวโพด และออย [2] ปญหามลพษทางอากาศทเกดขนจากการเผาในทโลงแจง ไมเพยงแตเกดปญหาเฉพาะ ในพนทประเทศไทยแตถอประเดนส าคญทหลายๆ ประเทศทวโลกใหความส าคญ
ทงน การประเมนอตราการปลดปลอยมลพษอ าก าศ จ าก ก จ ก รรม ต า ง ๆ ด าน ก า ร เกษ ต ร (Agriculture Sector) ส าหรบการเผาเศษพชจากการ
54 FEAT JOURNALJanuary - June 2017; 3(1) : 53-61
ท า เกษ ต รก รรม ในท โล งแ จ ง (Field burning of agricultural residues) ไดถกก าหนดใหเปนกจกรรมหนงในการด าเนนโครงการกลไกการพฒนาทสะอาด (Clean Development Mechanism : CDM) ซ ง ถ อเปนกลไกหนงทส าคญทไดสรางขนภายใตพธสารเกยวโต โดยมวตถประสงคเพอลดการปลดปลอยกาซเรอนกระจก ส าหรบประเทศไทย ไดพยายามจดท าขอมลอตราการปลอยมลพษ (Emission factors :EFs) และศกษาคา EFs ทเหมาะสมตอประเทศไทยแลวในหลายๆ กจกรรม เชน สาขาพลงงาน สาขาอตสาหกรรม สาขาปาไม สาขาการเปลยนแปลงการใชทดน สาขาการเกษตร(ปศสตว) อยางไรกด คา EFs ทมาจากสภาพกจกรรมทเปนจรงของการเผาเศษพชจากการท าเกษตรกรรมในทโลงแจงของประเทศไทยยงไมมงานวจยปรากฏ
งานวจยนจงมแนวคดในการศกษาปรมาณการปลดปลอยมลพษจากการเผาไหมเศษวสดเหลอใชทางการเกษตรในทโลงแจง โดยเลอก ฟางขาว มาใชใ น ก า ร ศ ก ษ า โด ย พ จ า รณ า ม ล พ ษ ไ ด แ ก คารบอนไดออกไซด (CO2) คารบอนมอนอกไซด (CO) ออกไซดของไนโตรเจน (NOX) ซลเฟอรไดออกไซด (SO2) และฝ นละอองรวม (Total Particulate Mater : TPM) โดยการทดสอบการเผาไหมในระดบหองปฏบตการ ตามมาตรฐานสากล แลวน าผลการศกษาทไดมาประเมนอตราการปลดปลอยมลพษ (Emission factors :EFs) ซงขอมลท ไดจะสามารถน าไปใชประโยชนในดานการประเมนอตราการปลดปลอยมลพษในรปตาง ๆ ในพนทการปลกขาวของประเทศไทยได ตลอดจนสามารถใชเปนขอมลพนฐานเพอการประยกตใชงานดานกลไกการพฒนาทสะอาดดานเกษตรกรรม อาท การจดท าแผนท
ฐานขอมลการปลดปลอยสารมลพษ (Emission Maps) การประเมนวฏจกรชวต (LCA) หรอการจดท ารอยเทาคารบอน (Carbon Footprint) ส าหรบประเทศไทยตอไป
2. วธการวจย
การวจยครงน เปนการประเมนการปลดปลอยมลพษจากการเผาไหมในระดบหองปฏบตการ และประเมนอตราการปลอยมลพษ (Emission factors :EFs) อนประกอบดวย คารบอนไดออกไซด (CO2) คารบอนมอนอกไซด (CO) ออกไซดของไนโตรเจน (NOx) ซลเฟอรไดออกไซด (SO2) และฝ นละอองรวม (Total Particulate Matter :TPM)
2.1 เศษวสดเหลอใชทท าการทดลอง เศษวสดเหลอใชทางการเกษตร ท ใชในการทดลองนคอ ฟางขาว ทเหลอจากการเกบเกยวของเกษตรกร โดยไมสนใจสายพนธ และพ นท การเพาะปลก ตวอยางฟางขาวทใชในการทดลองแสดงดงรปท 1
รปท 1 ฟางขาวทใชในการทดลอง
55FEAT JOURNALJanuary - June 2017; 3(1) : 53-61
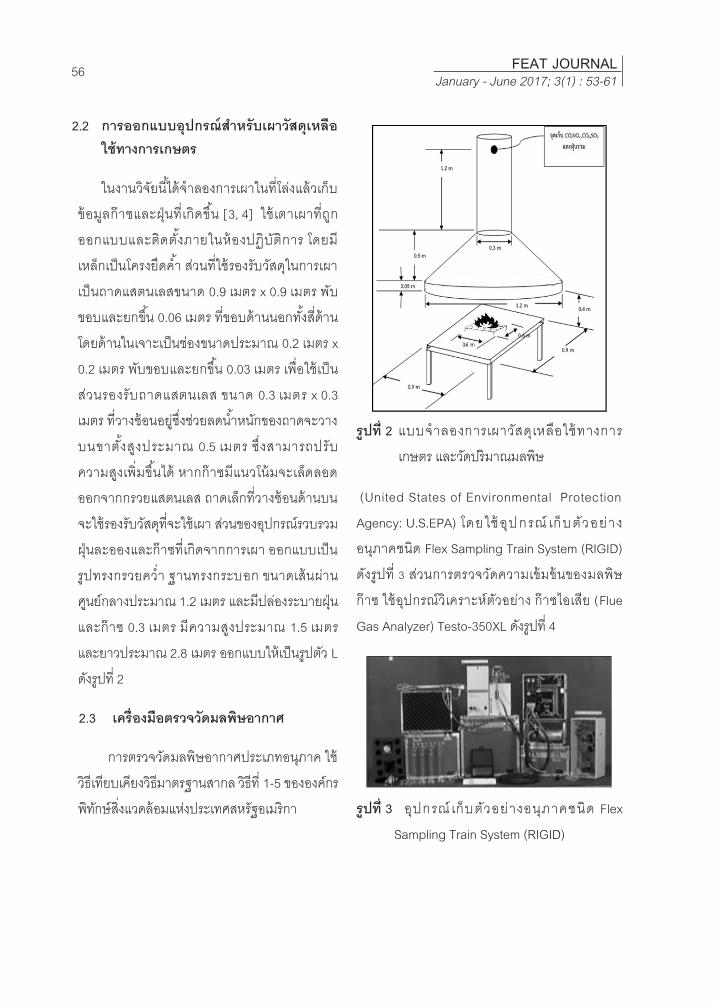
2.2 การออกแบบอปกรณส าหรบเผาวสดเหลอใชทางการเกษตร
ในงานวจยนไดจ าลองการเผาในทโลงแลวเกบขอมลกาซและฝ นทเกดขน [3, 4] ใชเตาเผาทถกออกแบบและตดตงภายในหองปฏบตการ โดยมเหลกเปนโครงยดค า สวนทใชรองรบวสดในการเผาเปนถาดแสตนเลสขนาด 0.9 เมตร x 0.9 เมตร พบขอบและยกขน 0.06 เมตร ทขอบดานนอกทงสดาน โดยดานในเจาะเปนชองขนาดประมาณ 0.2 เมตร x 0.2 เมตร พบขอบและยกขน 0.03 เมตร เพอใชเปนสวนรองรบถาดแสตนเลส ขนาด 0.3 เมตร x 0.3 เมตร ทวางซอนอยซงชวยลดน าหนกของถาดจะวางบนขาตงสงประมาณ 0.5 เมตร ซงสามารถปรบความสงเพมขนได หากกาซมแนวโนมจะเลดลอดออกจากกรวยแสตนเลส ถาดเลกทวางซอนดานบน จะใชรองรบวสดทจะใชเผา สวนของอปกรณรวบรวมฝ นละอองและกาซทเกดจากการเผา ออกแบบเปนรปทรงกรวยคว า ฐานทรงกระบอก ขนาดเสนผานศนยกลางประมาณ 1.2 เมตร และมปลองระบายฝ นและกาซ 0.3 เมตร มความสงประมาณ 1.5 เมตร และยาวประมาณ 2.8 เมตร ออกแบบใหเปนรปตว L ดงรปท 2
2.3 เครองมอตรวจวดมลพษอากาศ
การตรวจวดมลพษอากาศประเภทอนภาค ใชวธเทยบเคยงวธมาตรฐานสากล วธท 1-5 ขององคกรพทกษสงแวดลอมแหงประเทศสหรฐอเมรกา
รปท 2 แบบจ าลองการเผาวสดเหลอใชทางการ เกษตร และวดปรมาณมลพษ
(United States of Environmental Protection Agency: U.S.EPA) โดยใชอปกรณ เกบตวอยา ง อนภาคชนด Flex Sampling Train System (RIGID) ดงรปท 3 สวนการตรวจวดความเขมขนของมลพษกาซ ใชอปกรณวเคราะหตวอยาง กาซไอเสย (Flue Gas Analyzer) Testo-350XL ดงรปท 4
รปท 3 อปกรณ เกบตวอยางอนภาคชนด Flex
Sampling Train System (RIGID)
56 FEAT JOURNALJanuary - June 2017; 3(1) : 53-61
รปท 4 อปกรณวเคราะหตวอยางกาซไอเสย (Flue
Gas Analyzer) Testo-350XL
2.4 การหาอตราการปลดปลอยกาซมลพษ (Emission Factor)
การประมาณการคาสมประสทธการปลอยกาซมลพษจากการตรวจวดขอมลปรมาณกาซมลพษทไดจากการทดลอง น ามาวเคราะหหาคาสมประสทธการปลอยกาซจากวสดเหลอใชทางการเกษตรแตละชนดด วย ก า รค า น วณ จ าก สม ก า รขอ ง Jenkins et al.(1996) [5] ดงแสดงในสมการท 1
Ei =
10-3
mfd
AsuCi
wi
22.4
dt (1)
เมอ Ei คอ คาสมประสทธการปลอยกาซ i (gemission/kgdm biomass) mfd คอ มวลของเศษวสดทใชในการเผา t0 คอ เวลาเรมตนของการเผาเศษวสดเหลอใช tf คอ เวลาสนสดของการเผาเศษวสดเหลอใช
As คอ พนทหนาตดของปลองระบายอากาศ u คอ ความเรวลมของกาซทเคลอนทผานปลอง Ci คอ ความเขมขนของสารทท าการตรวจวด wi คอ มวลโมเลกลของสารทท าการตรวจวด
2.5 การประเมนปรมาณฝนละอองรวม (TPM)
การประเมนฝ นละอองรวมของวสดเหลอใชทางการเกษตร ความเขมขนของฝ นละอองรวมค านวณจากสมการของ Jenkins et al.(1996) [5] ดงแสดงในสมการท 2
Ei,j = 1 Asū mk,i ƞ
Ti (2) mfd V0 Ts
เมอ Ei,j คอ คาสมประสทธการปลอยฝ นละออง (gemission/kgdm biomass) mfd คอ มวลของเศษวสดทใชในการเผา mk,i คอ น าหนกของตวอยาง i ทตรวจวดได V0 คอ อตราไหลของปมดดอากาศ ƞ คอ ปรมาตรความจของฝ นละออง Ti คอ อณหภมบรรยากาศภายนอกปลอง
ระบายอากาศ Ts คอ อณหภมของกาซภายในปลอง ระบายอากาศ
2.6 การประมาณปรมาณการปลดปลอยกาซ มลพษ ในระดบประเทศ
เมอไดผลการค านวณอตราการปลดปลอยมลพษจากการเผาวสดเหลอใชทางการเกษตร ฟางขาว ซงขาวโพด และยอด/ใบออย แลวจงน าขอมลมาประมาณปรมาณการปลดปลอยมลพษดงกลาวใน
57FEAT JOURNALJanuary - June 2017; 3(1) : 53-61
ระดบประเทศโดยการค านวณใชสมการอางองตามงาน ว จ ย ขอ ง Seiler and Crutzen (2003) [6] ด งแสดงในสมการท 3
Emission = M EF (3)
เมอ Emission คอ ปรมาณมลพษทปลดปลอย ตอป
gemission/year M คอ ปรมาณวสดเหลอใชทางการเกษตร
ต อ พ น ท ต อ ป ใ น ป ร ะ เท ศ ไ ท ย (kgdry biomass/year/rai)
EF คอ อตราปลดปลอยมลพษ (gemission/kgdm biomass)
2.7 ขนตอนการทดลอง การทดลองนเปนการตรวจวดปรมาณมลพษทเกดขนกบการเผาเศษฟางขาว จ าลองการเผาในทโลง ท าการวเคราะห 3 ซ าส าหรบแตละตวอยาง โดยใชตวอยางในการทดสอบประมาณ 0.5-1.0 kg/ครง หลงจากเผาไปถงขนเสถยร หรอประมาณ 30 วนาท
ท า กา รต รวจวด ก าซและฝ น ล ะอองท เ ก ด ข น กระบวนการเผาใชเวลาประมาณ 4-10 นาท อณหภมในการเผาไหมประมาณ 240-290 องศาเซลเซยส ความเรวแกสทระบายจากปลองประมาณ 13.34-16.00 เมตร/วนาท และน าผลทไดมาค านวณอตราการปลดปลอยกาซมลพษ (Emission Factor)
3. ผลการวจยและการอภปรายผล 3.1 ปรมาณวสดเหลอใชทางการเกษตร
การศกษานพจารณาขอมลจากฐานขอมล เอกสารราชการ และขอมลผลผลตพช ของส านกงานเศรษฐกจการเกษตร [2] จากการประเมนปรมาณเศษวสดเหลอใชทางการเกษตรทยงไมมการน ามาใชของประเทศไทย ป พ.ศ. 2558 ดงตารางท 1 พบวา ฟาง ขาว มปรมาณมเศษเหลอทงทยงไมมการน ามาใชประโยชน คดเปนรอยละ 19.36 ซงเศษวสดเหลอใชเหลานเมอมการเผาจะท าใหเกดปญหามลพษ โดยคาเหลานจะถกน าไปประเมนปรมาณการปลดปลอยมลพษในล าดบตอไป
ตารางท 1 ปรมาณเศษฟางขาวเหลอทงในประเทศไทย ป พ.ศ. 2558
ชนดเศษวสด ปรมาณผลผลต (ลานตน/ป)
การเกดวสดเหลอใช ตอผลผลต
การน าไปใชประโยชน ปรมาณวสดเหลอใช
ทยงไมมการใช (ลานตน/ป)
CRR ปรมาณ รอยละ ปรมาณ ฟางขาว 27.06 1.19 32.20 31.60 10.18 22.03
ตารางท 2 คาปจจยการระบาย (emission factor) จากการเผาเศษฟางขาว
ชนด อตราการปลดปลอยมลพษ (Emission factors: EF) (หนวย g/kgdm) )
CO2 CO NOX SO2 TPM ฟางขาว 1,118.47 ± 11.43 78.86 ± 7.47
1.44 ± 0.07
0.56 ± 0.05
6.69 ± 0.02
58 FEAT JOURNALJanuary - June 2017; 3(1) : 53-61
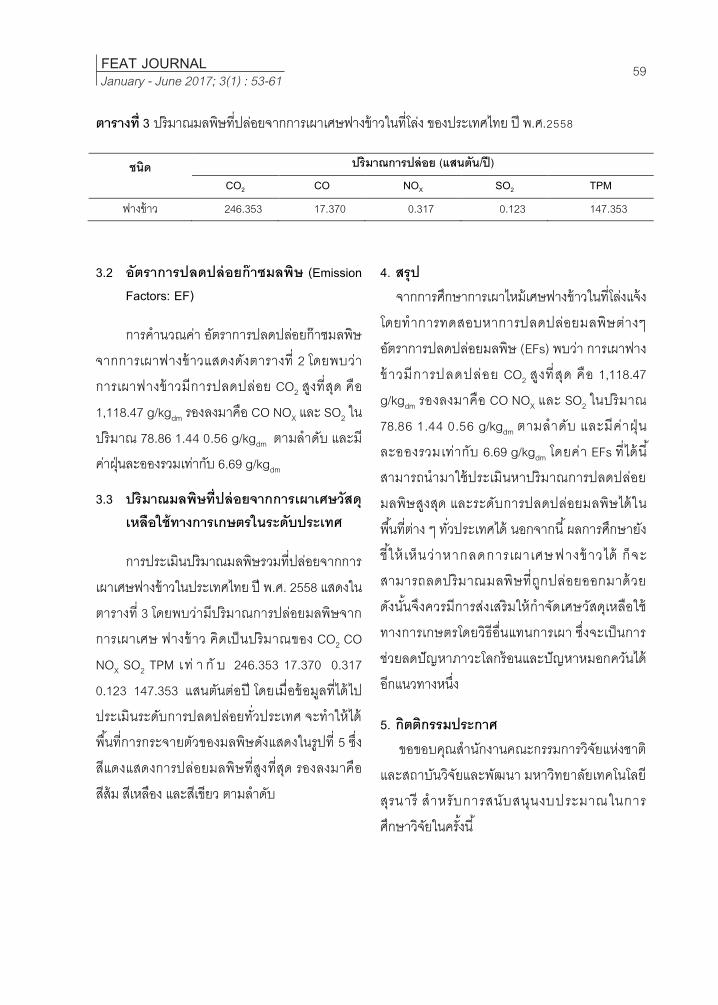
ตารางท 3 ปรมาณมลพษทปลอยจากการเผาเศษฟางขาวในทโลง ของประเทศไทย ป พ.ศ.2558
ชนด ปรมาณการปลอย (แสนตน/ป) CO2 CO NOX SO2 TPM
ฟางขาว 246.353
17.370
0.317
0.123
147.353
3.2 อตราการปลดปลอยกาซมลพษ (Emission Factors: EF)
การค านวณคา อตราการปลดปลอยกาซมลพษ จากการเผาฟางขาวแสดงดงตารางท 2 โดยพบวา การเผาฟางขาวมการปลดปลอย CO2 สงทสด คอ 1,118.47 g/kgdm รองลงมาคอ CO NOX และ SO2 ในปรมาณ 78.86 1.44 0.56 g/kgdm ตามล าดบ และมคาฝ นละอองรวมเทากบ 6.69 g/kgdm
3.3 ปรมาณมลพษทปลอยจากการเผาเศษวสดเหลอใชทางการเกษตรในระดบประเทศ
การประเมนปรมาณมลพษรวมทปลอยจากการเผาเศษฟางขาวในประเทศไทย ป พ.ศ. 2558 แสดงในตารางท 3 โดยพบวามปรมาณการปลอยมลพษจากการเผาเศษ ฟางขาว คดเปนปรมาณของ CO2 CO NOX SO2 TPM เ ท า ก บ 246.353 17.370 0.317 0.123 147.353 แสนตนตอป โดยเมอขอมลทไดไปประเมนระดบการปลดปลอยทวประเทศ จะท าใหไดพนทการกระจายตวของมลพษดงแสดงในรปท 5 ซง สแดงแสดงการปลอยมลพษทสงทสด รองลงมาคอ สสม สเหลอง และสเขยว ตามล าดบ
4. สรป จากการศกษาการเผาไหมเศษฟางขาวในทโลงแจง
โดยท าการทดสอบหาการปลดปลอยมลพษตางๆ อตราการปลดปลอยมลพษ (EFs) พบวา การเผาฟางขาวมการปลดปลอย CO2 สงท สด คอ 1,118.47 g/kgdm รองลงมาคอ CO NOX และ SO2 ในปรมาณ 78.86 1.44 0.56 g/kgdm ตามล าดบ และมคาฝ นละอองรวมเทากบ 6.69 g/kgdm โดยคา EFs ทไดน สามารถน ามาใชประเมนหาปรมาณการปลดปลอยมลพษสงสด และระดบการปลดปลอยมลพษไดในพนทตาง ๆ ทวประเทศได นอกจากน ผลการศกษายงช ให เหนวาหากลดการเผาเศษฟางขาวได กจะสามารถลดปรมาณมลพษทถกปลอยออกมาดวย ดงนนจงควรมการสงเสรมใหก าจดเศษวสดเหลอใชทางการเกษตรโดยวธอนแทนการเผา ซงจะเปนการชวยลดปญหาภาวะโลกรอนและปญหาหมอกควนไดอกแนวทางหนง
5. กตตกรรมประกาศ ขอขอบคณส านกงานคณะกรรมการวจยแหงชาต
และสถาบนวจยและพฒนา มหาวทยาลยเทคโนโลยสรนาร ส าหรบการสนบสนนงบประมาณในการศกษาวจยในครงน
59FEAT JOURNALJanuary - June 2017; 3(1) : 53-61
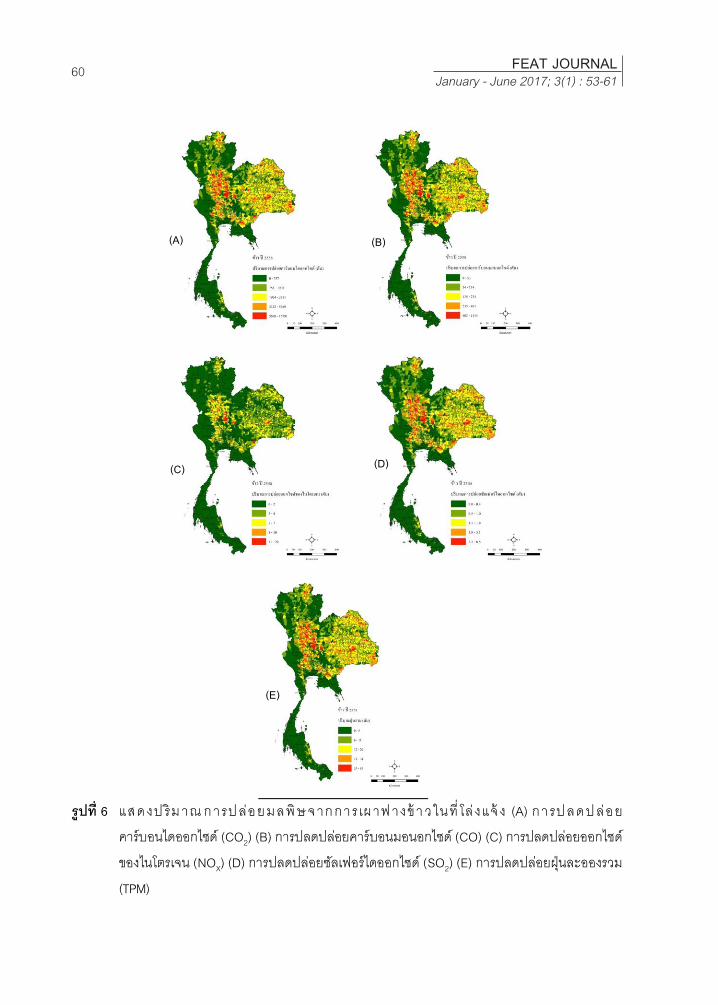
รปท 6 แส ด งป รม าณ ก ารป ลอ ย ม ล พ ษ จ าก ก า รเผ าฟ างข า ว ใน ท โล งแ จ ง (A) ก า รป ล ด ป ลอ ย
คารบอนไดออกไซด (CO2) (B) การปลดปลอยคารบอนมอนอกไซด (CO) (C) การปลดปลอยออกไซดของไนโตรเจน (NOX) (D) การปลดปลอยซลเฟอรไดออกไซด (SO2) (E) การปลดปลอยฝ นละอองรวม (TPM)
(A) (B)
(C) (D)
(E)
6. เอกสารอางอง
[1] กรมควบคมมลพษ. รายงานสถานการณและการจดการคณภาพอากาศและเสยงป 2553. ส านกจดการคณภาพอากาศและเสยง กรมควบคมมลพ ษ กระท รวงท รพยาก รธรรมชาต และสงแวดลอม; 2553.
[2] ส านกงานเศรษฐกจการเกษตร กระทรวงเกษตรและสหกรณ. สถตการเกษตรของประเทศไทย ป 2558; 2558.
[3] Cao G, Zhang X, Gong S, Zheng F. Investigation on emission factors of particulate matter and gaseous pollutants from crop residue burning. Journal of Environmental Sciences 2008; 20(1): 50–55.
[4] França DA, Longo KM, Neto TGS, Santos JC, Freitas SR, Rudorff BFT, Cortez EV, Anselmo E, Carvalho JA. Pre-Harvest Sugarcane Burning: Determination of Emission Factors through Laboratory Measurements. Atmosphere 2012; 3: 164-180.
[5] Jenkins BM, Turn SQ, Williams RB, Goronea, M, Abd-el-Fattah H. Atmospheric pollutant emission factors from open burning of agricultural and forest biomass by wind tunnel simulations. California: California State Air Resources Board; 1996.
[6] Seiler W, Crutzen PJ. Estimates of gross and net fluxes of carbon between the biosphere and the atmosphere from biomass burning. Climatic Change 1980; 2: 207-247.
60 FEAT JOURNALJanuary - June 2017; 3(1) : 53-61
6. เอกสารอางอง
[1] กรมควบคมมลพษ. รายงานสถานการณและการจดการคณภาพอากาศและเสยงป 2553. ส านกจดการคณภาพอากาศและเสยง กรมควบคมมลพ ษ กระท รวงท รพยาก รธรรมชาต และสงแวดลอม; 2553.
[2] ส านกงานเศรษฐกจการเกษตร กระทรวงเกษตรและสหกรณ. สถตการเกษตรของประเทศไทย ป 2558; 2558.
[3] Cao G, Zhang X, Gong S, Zheng F. Investigation on emission factors of particulate matter and gaseous pollutants from crop residue burning. Journal of Environmental Sciences 2008; 20(1): 50–55.
[4] França DA, Longo KM, Neto TGS, Santos JC, Freitas SR, Rudorff BFT, Cortez EV, Anselmo E, Carvalho JA. Pre-Harvest Sugarcane Burning: Determination of Emission Factors through Laboratory Measurements. Atmosphere 2012; 3: 164-180.
[5] Jenkins BM, Turn SQ, Williams RB, Goronea, M, Abd-el-Fattah H. Atmospheric pollutant emission factors from open burning of agricultural and forest biomass by wind tunnel simulations. California: California State Air Resources Board; 1996.
[6] Seiler W, Crutzen PJ. Estimates of gross and net fluxes of carbon between the biosphere and the atmosphere from biomass burning. Climatic Change 1980; 2: 207-247.
61FEAT JOURNALJanuary - June 2017; 3(1) : 53-61

_________________________________________________________________________________
_________________________________________________________________________________
ขอแนะน ำในกำรสงตนฉบบบทควำมเพอพจำรณำตพมพ
วารสารวศวกรรมฟารมและเทคโนโลยควบคมอตโนมต ( FEAT Journal ) มกาหนดออกเปนราย 6 เดอน คอ มกราคม -มถนายน และกรกฎาคม-ธนวาคม ของทกป จดพมพโดยกลมวจยวศวกรรมฟารมและเทคโนโลยควบคมอตโนมต คณะวศวกรรมศาสตรมหาวทยาลยขอนแกน เพอเปนการสงเสรมและเผยแพรความร ผลงานทางวชาการ งานวจยทางดานวศวกรรมศาสตรและเทคโนโลยพรอมทงยงจดสง เผยแพรตามสถาบนการศกษาตางๆ ในประเทศดวย บทความทตพมพลงในวารสาร FEAT ทกบทความนนจะตองผานความเหนชอบจากผทรงคณวฒในสาขาทเกยวของและสงวนสทธตาม พ.ร.บ. ลขสทธ พ.ศ. 2535
ตนฉบบบทควำม
โปรดปฏบตตามหลกเกณฑอยางเครงครด จดพมพดวยโปรแกรม Microsoft Word for Window ชนดตวอกษรในบทความฉบบภาษาไทยและภาษาองกฤษ จะตองใชตวอกษร Cordia New ทงหมด ความยาวของตนฉบบ ไมเกน 10 หนา รวมรปภาพและตารางตางๆ หรอมจานวนคาไมเกน 10,000 คา
กรณาใชกระดาษขนาด A4 ปรบเคาโครงขนาดกระดาษ ความกวาง 7.5 นว ความสง 10.5 นว และรปแบบหนาเปน 2 คอลมน ระยะหาง 0.19 นว กรอบของบทความกาหนดดงน ขอบดานบน 0.88 นว ขอบดานลาง 0.75 นว ดานซาย 1 นว และดานขวา 0.75 นว
โครงสรำงบทควำม
เนอเรองของบทความตองประกอบดวยหวขอตามลาดบ ดงน 1. บทนา 2. วธการวจย 3. ผลการวจยและอภปราย 4. สรป 5. กตตกรรมประกาศ 6. เอกสารอางอง
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วำรสำรวศวกรรมฟำรมและเทคโนโลยกำรควบคมอตโนมต
สถำนทตดตอในกำรจดสงบทควำมเพอพจำรณำตพมพ
1) จดสงบทความผานเวบไซต http://feat.kku.ac.th 2) จดสงบทความทางอเมล [email protected] 3) จดสงเปนเอกสาร 1 ชด โดยสงมาท กองบรรณาธการวารสาร FEAT ภาควชาวศวกรรมเครองกล คณะวศวกรรมศาสตร มหาวทยาลยขอนแกน 123 ถนนมตรภาพ อาเภอเมอง จงหวดขอนแกน 40002 โทร. 043-202845 หรอ โทรศพทมอถอ 098-2269153
แบบฟอรมสงบทความเพอพจารณาลงตพมพกบวารสาร FEAT
วนท………… เดอน………………………………….…….. พ.ศ. …………..........
ขาพเจา (นาย/นาง/นางสาว) …………………………………………………………………………………………………………………. ขอสงบทความ บทความวจย บทความวชาการ ชอบทความ (ภาษาไทย) ……………………………………………………………………………. …………………………………………………………………………….. (ภาษาองกฤษ) ……………………………………………………………………………. ……………………………………………………………………………. ชอ-นามสกล ผเขยน (ภาษาไทย) ชอ-นามสกล ผเขยน (ภาษาองกฤษ) 1……………………………………………………….. 1……………………………………………………………. 2………………………………………………………. 2……………………………………………………………. 3................................................................................ 3..................................................................................... 4................................................................................ 4.................................................................................... 5................................................................................ 5.................................................................................... 6................................................................................ 6................................................................................... ชอ-และทอย ผเขยนทสามารถตดตอไดสะดวก ชอ…………………………………………………………………………………………………………………………………………………………….ทอย…………………………………………………………………………………………………………………………………………………………..จงหวด……………………………………………………………………………………………………………………………………………………….. รหสไปรษณย…………………………………………………โทรศพท………………………………………………………………………………….. โทรศพทมอถอ………………………………………………..โทรสาร..................................................................................................... E-mail: ………………………………………………………………………………………………………………………………………………………. ขาพเจาขอรบรองวาบทความน [ ] เปนผลงานของขาพเจาแตเพยงผ เดยว
[ ] เปนผลงานของขาพเจาและผ รวมงานตามชอทระบ ในบทความจรง
ขาพเจาขอรบรองวาบทความนไมเคยลงตพมพในวารสารใดมากอน และจะไมน าบทความดงกลาวลงตพมพในวารสารฉบบอน ทงน หากขาพเจาขอถอนบทความและไมลงตพมพในวารสารวศวกรรมสาร มข. หรอเพกเฉยไมสงบทความฉบบแกไขเพอลงตพมพ ขาพเจาจะเปนผ รบผดชอบคาตอบแทนผทรงคณวฒผประเมนบทความทงหมด
ลงนาม……………………………................................... (.................................................................)
Corresponding Author


_________________________________________________________________________________
_________________________________________________________________________________ ชอบทความภาษาไทย Cordia New (ขนาด 16 จด ตวเขม) ชอบทความภาษาองกฤษ Cordia New (ขนาด 16 จด ตวเขม
ระบเฉพาะชอ-นามสกลผ เขยน ภาษาไทย (ขนาด 14 จด) ระบเฉพาะชอ-นามสกลผ เขยน ภาษาองกฤษ (ขนาด 14 จด)
ระบหนวยงานทสงกด ผ เขยน ภาษาไทย (ขนาด 12 จด) ระบหนวยงานทสงกด ผ เขยน องกฤษ (ขนาด 12 จด)
Received: …………….. Accepted: ………………
บทคดยอ
ตวอยางการจดพมพเอกสารตนฉบบส าหรบตพมพในวศวกรรมสาร มหาวทยาลยขอนแกน ควรปฏบตตามค าแนะน าอยางเครงครด บทคดยอควรมเพยงยอหนาเดยวทอธบายถง วตถประสงค วธการศกษา ผลการศกษา และสรป ไมควรเกน 300 ค า ค าหลกทเปนภาษาองกฤษใหตวอกษรค าแรกเปนตว พมพใหญ ค าในล าดบถดไปเปนตวพมพเลก ค าส าคญ : จ านวน 4 ถง 6 ค า ภาษาไทยแตละค าเวนวรรค 1 จด ไมตองมจลภาค (,)
Abstract
This is an instruction for manuscript preparation for Publication KKU Engineering Journal. Please follow this guideline strictly. The abstract should contain a single paragraph describing objectives, methodology and a summary of important results and its length should not exceed 300 words. Keywords : 4-6 keywords, separated by colons. and the first letter of each keyword must be capital letter _______________________________________ *ตดตอ: อเมล, เบอรโทรศพท, เบอรโทรสาร
FEAT JOURNAL FARM ENGINEERING AND AUTOMATION TECHNOLOGY JOURNAL วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต
1. บทน า
บทความนแสดงตวอยางแนวทางการเตรยมตนฉบบ ของคณ เพ อ ต พ ม พ ใน ว ศ วก รรมสาร มหาวทยาลย ขอนแก น และโปรดป ฏบต ต ามหลกเกณฑอยางเครงครด จดพมพดวยโปรแกรม Microsoft Word for Window ความยาวของตนฉบบจะตองไมเกน 10 หนา มจ านวนค าไมเกน 10,000 ค า
1.1 ขนาดกระดาษและระยะขอบ
กรณาใชกระดาษขนาด A4 ปรบเคาโครงขนาดกระดาษ ความกวาง 7.5 นว ความสง 10.5 นว และรปแบบหนาเปน 2 คอลมน ระยะหาง0.19 นว กรอบของบทความก าหนดดงน ขอบดานบน 0.88 นว ขอบดานลาง 0.75 นว. ดานซาย 1 นว.และดานขวา 0.75 นว ใหเวน 1 บรรทดระหวางหวเรองทกครง
1.2 ชนดตวอกษร
ในบทความฉบบภาษาไทยและภาษาองกฤษจะตองใชตวอกษร Cordia New ทงหมด ชอบทความใชตวอกษรขนาด 16 จด ตวหนา ผ แตงใชตวอกษรธรรมดาขนาด 14 จด สถาบนและขอมลตดตอใชตวธรรมดาขนาด 12 จด หวเรองและหวเรองยอยใชอกษรธรรมดาขนาด 14 จด การบรรยายและเนอหาใชต ว ธ รรม ด าขนาด 14 จ ด ค า ใน วง เล บ ท เป นภาษาองกฤษใหเปนตวเลกทงหมด
1.3 ส าหรบการล าดบหวขอยอย
ใหใชตวอกษรขนาด 14 จด ตวหนา ใหชดทางกรอบซาย แตละหวขอยอยจะเวน 1 บรรทด (ปรบให
บรรทดมขนาดเทากบอกษรขนาด 8 จด) สวนหวขอยอยใหเขยนตามตวอยาง ดงรายการตอไปน 1. รายการแรกในรายการน 2. รายการทสอง
2.1. รายการยอย
3. รายการสดทาย
1.4 โครงสรางบทความ
เนอเรองของบทความตองประกอบดวยหวขอตามล าดบดงน 1. บทน า 2. วธการการวจย 3. ผลการวจยและอภปราย 4. สรป 5. กตตกรรมประกาศ 6. เอกสารอางอง
2. ชอบทความ
ชอบทความใหเรมตนบทความทบรรทดแรก โดยใชตวอกษรขนาด 16 จด และเปนตวหนา จด ชอบทความชดทางกรอบซาย
3. ชอผแตงและสถานทตดตอ
ชอผแตงใหพมพใตชอบทความ จดชอผแตงใหอยชดทางกรอบซาย ใชตวอกษรธรรมดาขนาด 14 จด ในกรณมผ ท าวจยหลายทานจากหนวยงานตางกนใหก ากบตวยก 1), 2) ไวหลงชอ ส าหรบ Corresponding ใหใสเครองหมาย *ก ากบไวทายชอ สถานทตดตอ ใหพมพทอยหนวยงาน รหสไปรษณย ประเทศ พมพใตชอผแตงใชตวธรรมดาขนาด 12 จด จดชดทางกรอบซาย
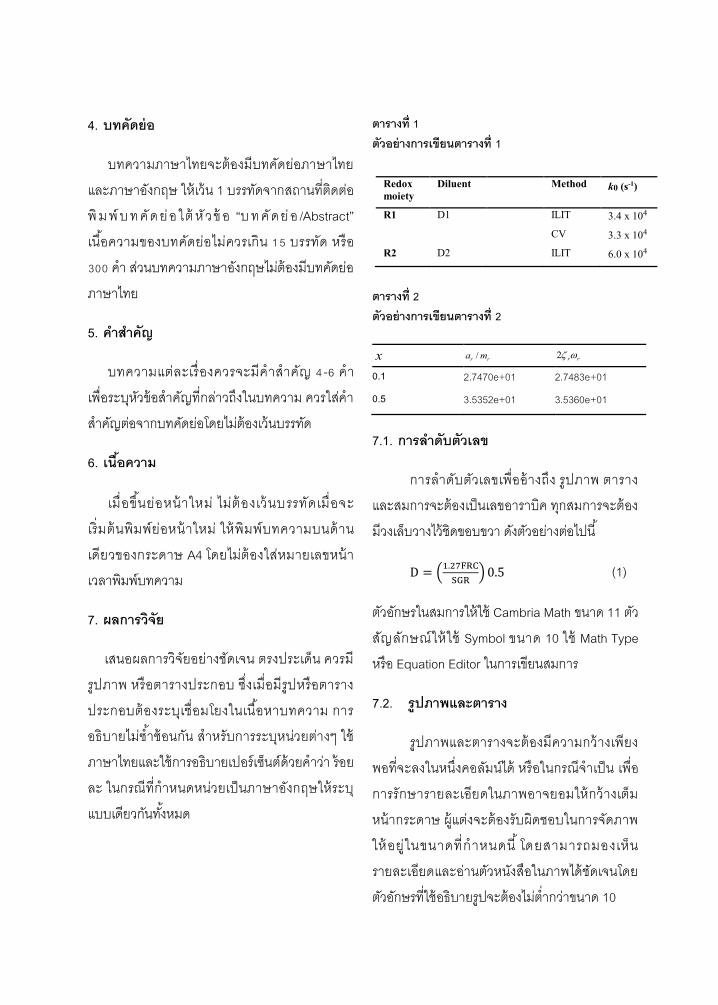
4. บทคดยอ
บทความภาษาไทยจะตองมบทคดยอภาษาไทยและภาษาองกฤษ ใหเวน 1 บรรทดจากสถานทตดตอ พ ม พ บทคด ย อ ใ ต ห ว ข อ “บทคดย อ /Abstract” เนอความของบทคดยอไมควรเกน 15 บรรทด หรอ 300 ค า สวนบทความภาษาองกฤษไมตองมบทคดยอภาษาไทย
5. ค าส าคญ
บทความแตละเรองควรจะมค าส าคญ 4 -6 ค า เพอระบหวขอส าคญทกลาวถงในบทความ ควรใสค าส าคญตอจากบทคดยอโดยไมตองเวนบรรทด
6. เนอความ
เมอขนยอหนาใหม ไมตองเวนบรรทดเมอจะเรมตนพมพยอหนาใหม ใหพมพบทความบนดานเดยวของกระดาษ A4 โดยไมตองใสหมายเลขหนาเวลาพมพบทความ
7. ผลการวจย
เสนอผลการวจยอยางชดเจน ตรงประเดน ควรม รปภาพ หรอตารางประกอบ ซงเมอมรปหรอตารางประกอบตองระบเชอมโยงในเนอหาบทความ การอธบายไมซ าซอนกน ส าหรบการระบหนวยตางๆ ใชภาษาไทยและใชการอธบายเปอรเซนตดวยค าวา รอยละ ในกรณทก าหนดหนวยเปนภาษาองกฤษใหระบแบบเดยวกนทงหมด
ตารางท 1 ตวอยางการเขยนตารางท 1
ตารางท 2 ตวอยางการเขยนตารางท 2
7.1. การล าดบตวเลข
การล าดบตวเลขเพออางถง รปภาพ ตารางและสมการจะตองเปนเลขอาราบค ทกสมการจะตองมวงเลบวางไวชดขอบขวา ดงตวอยางตอไปน
D = (1.27FRCSGR ) 0.5 (1)
ตวอกษรในสมการใหใช Cambria Math ขนาด 11 ตวสญลกษณใหใช Symbol ขนาด 10 ใช Math Type หรอ Equation Editor ในการเขยนสมการ
7.2. รปภาพและตาราง
รปภาพและตารางจะตองมความกวางเพยงพอทจะลงในหนงคอลมนได หรอในกรณจ าเปน เพอการรกษารายละเอยดในภาพอาจยอมใหกวางเตมหนากระดาษ ผแตงจะตองรบผดชอบในการจดภาพใหอย ในขนาดทก าหนดน โดยสามารถมองเหนรายละเอยดและอานตวหนงสอในภาพไดชดเจนโดยตวอกษรทใชอธบายรปจะตองไมต ากวาขนาด 10
x /r ra m 2 r r 0.1 2.7470e+01 2.7483e+01 0.5 3.5352e+01 3.5360e+01
Redox moiety
Diluent Method k0 (s-1)
R1 D1 ILIT 3.4 x 104
CV 3.3 x 104
R2 D2 ILIT 6.0 x 104
รปภาพลายเสนจะตองใชเสนหมกสด าวาดดวยโ ป ร แ ก ร ม เ ช น Visio, Adobe Illustrator, Macromedia Freehand หรอโปรแกรมวาดรปอนๆ สวนภาพถายควรเปนภาพทมความคมชด
รปภาพควรมรายละเอยดเทาทจ าเปน รปภาพทกรปจะตองมหมายเลขและค าบรรยายภาพก ากบใตภาพ โดยให
เรยงตามล าดบทปรากฏ จาก รปท 1, รปท 2 , ... พมพหมายเลขและชอรปไวใตรปภาพ จะตองก าหนดใหอยตรงกลางเอกสาร ใหเวนชองวาง 1 บรรทด หลงค าบรรยายรป รปภาพทกรป และตารางทกตารางทปรากฏในบทความจะตองมการอางองในเนอหา
ในกรณทเปนตารางจะตองมค าบรรยายก ากบตารางไวเหนอตารางโดยใหเรยงตามล าดบทปรากฏ จาก 1, 2, 3,... ตารางจะตองก าหนดใหชดขอบซายของเอกสาร ใหเวนชองวาง 1 บรรทดกอนค าบรรยายตารางและหลงตาราง ตามตวอยางตารางดงน
8. การอภปรายผล
การอภปรายผลวจย เพอใหผ อานมความเหนคลอยตามเพอเปรยบเทยบกบผลการวจยของผ อน เพอเสนอลทางทจะใชประโยชน หาขอยตในการวจยบางอยาง ฯลฯ ผลการวจยและการอภปรายผลอาจน ามาเขยนไวในตอนเดยวกน
9. สรป
สรปประเดนและสาระส าคญของงานวจย ไมควรมความยาวมากเกนไป โดยบทความของทานควรไดรบการตรวจสอบจากผ รวมเขยนทกทานกอนท าการสงบทความ
10. กตตกรรมประกาศ
เพอเปนการแสดงความขอบคณผใหทนสนบสนนสรปประเดนและสาระส าคญของงานวจย ไมควรมความยาวมากเกนไป โดยบทความของทานควรไดรบการตรวจสอบจากผ รวมเขยนทกทานกอนท าการสงบทความ
11. เอกสารอางอง
การเขยนเอกสารอางองใชระบบแวนคเวอร (vancuvour style) ทงภาษาไทยและภาษาองกฤษ
ทงนเพอความสมบรณและความนาเชอถอของบทความทานควรใชเอกสารอางองจากวารสารทอยในฐาน TCI ((Thai Journal Citation Index Centre) ทสามารถตรวจสอบไดไมนอยกวารอยละ 70 และควรใชการอางอ งจากรายงานผลการวจย เอกสารประกอบการประชม และหรอวทยานพนธเทาทจ าเปน
11.1. การอางองในเนอหา
แบบการอางองเอกสารในเนอหาของบทความ ใชระบบตวเลข ใหเรยงล าดบเลขตามล าดบของเอกสารทมการอางถงในเนอหาและหมายเลขทอางถงในเนอเรองนนจะตองตรงกบหมายเลขทมการก ากบไวในสวนเอกสารอางองดวย ใหใชตวเลขอารบคในวงเลบตอทายขอความทน ามาอางองในบทความ เชน [1] หรอ [2-4, 8, 10] หมายถงอางถงล าดบผแตงท 1 ห รอ ล าดบท 2 , 3, 4, 8, 10 โดยเรยงล าดบจากหมายเลข 1, 2, 3,... ไปจนถงเลขทสดทาย ตามการอางองการเขยนเอกสารอางอง
11.2. ตวอยางการเขยนเอกสารอางองทายเรอง
เขยนอางองแบบแวนคเวอร และใสอางองในทายเรองเฉพาะทมปรากฏในเนอหาบทความหรอบทความวจยเทานน
1. การเขยนอางองจากหนงสอ
[1] Murray PR, Rosenthal KS, Kobayashi GS, Pfaller MA. Medical microbiology. 4th ed. St. Louis: Mosby; 2002.
[2] จ ารญ ตนตพศาลกล. การออกแบบชนสวนเค รอ งจ ก รก ล 1. เม ด ท รา ยพ ร น ต ง : กรงเทพฯ; 2540.
2. การเขยนอางองจากวารสาร
[3] Ramazan B, et al. A Water Pumping Control System with A Programmable logic controller (PLC) and Industrial Wireless Modules for Industrial Plants - An Experimental Setup. ISA Transactions. 2011; 50(1): 321-328.
[4] สกญญา หงสทอง และ สมใจ ขจรชพพนธงาม. การผลตไบโอดเซลจากนามนราขาวดวยกระบวนการใชตวเรงปฏกรยาและไมใช ตวเรงปฏกรยาดวยเมทานอลภาวะเหนอวกฤต. วารสารมหาวทยาลยนเรศวร 2553; 18 (3): 20-26.
3. การเขยนอางองจากวทยานพนธ
[5] Promma K, Thong - In W. Algae Cultivation for Biofuel Using Effluent Wastewater [MEn Thesis]. Khon Kaen: Khon Kaen University; 2013.
[6] สรประภา แพงค าแหง. การลดปรมาณสยอมผาไหมโดยการประยกตใชหลกการเทคโนโลยสะอาดส าหรบอตสาหกรรมสงทอขนาดเลก. [วทยานพนธปรญญาวศวกรรมศ า ส ต ร ม ห า บ ณ ฑ ต ] . ข อ น แ ก น : มหาวทยาลยขอนแกน; 2553.
4. การเขยนอางองจากบทความจากการประชมวชาการ
[7] Kimura J, Shibasaki H, editors. Recent Advances in Clinical Neurophysiology. Proceedings of The 10th International Congress of EMG and Clinical Neurophysiology; 1995 Oct 15-19; Kyoto, Japan. Amsterdam: Elsevier; 1996.
[8] นครนทร เทอดเกยรตกล พชร หอวจตร และ สมนา ราษฎรภกด. การจดการการใชน าส าหรบกระบวนการยอม ในอตสาหกรรมผลตพรมตามแนวทางเทคโนโลยสะอาด. การประชมวชาการสงแวดลอมแหงชาตครงท 14, 27-29 พฤษภาคม 2558, จงหวดเชยงใหม; 2558.
5. การอางองเอกสารอเลกทรอนกส
[9] Foley KM, Gelband H, editors. Improving palliative care for cancer [Internet]. Washington: National Academy Press; 2001 [cited 2002 Jul 9]. Available from: http://www.nap.edu/ books/0309074029/html/.
[10] ทานตะวน. (สอออนไลน) [เขาถงเมอ วนท 16 ก ร ก ฎ า ค ม 2550]. เ ข า ถ ง ไ ด จ า ก : http://.www.doae.go.th.html.detail.sunflower.t2.gif

5. การอางองเอกสารอเลกทรอนกส
[9] Foley KM, Gelband H, editors. Improving palliative care for cancer [Internet]. Washington: National Academy Press; 2001 [cited 2002 Jul 9]. Available from: http://www.nap.edu/ books/0309074029/html/.
[10] ทานตะวน. (สอออนไลน) [เขาถงเมอ วนท 16 ก ร ก ฎ า ค ม 2550]. เ ข า ถ ง ไ ด จ า ก : http://.www.doae.go.th.html.detail.sunflower.t2.gif

ใบสมครเปนสมาชก วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต (FEAT JOURNAL)
[ ] สมาชกใหม [ ] ตออาย สมาชกเลขท……………………………
วนท………… เดอน………………………พ.ศ. …………..
ชอผสมคร …………………………………………………………………………………… [ ] บคคลทวไป [ ] นกเรยน นกศกษา ชอ…………………………………………………………………………………………………………………………………………………………….ทอย…………………………………………………………………………………………………………………………………………………………..จงหวด……………………………………………………………………………………………………………………………………………………….. รหสไปรษณย…………………………………………………โทรศพท………………………………………………………………………………….. โทรศพทมอถอ………………………………………………..โทรสาร..................................................................................................... E-mail: ………………………………………………………………………………………………………………………………………………………. มความประสงคจะบอกรบ “วารสารวศวกรรมฟารมและเทคโนโลยการควบคมอตโนมต (FEAT JOURNAL) ” เปนเวลา………………..ป โดยเรมตงแตฉบบท……………ปท……………ถงฉบบท………….ปท……………รวม………………ฉบบ ทงนใหสงวารสารไปท [ ] ผสมคร [ ] โรงเรยน/หนวยงานทบรจาค ชอ…………………………………………………………………………………………………………………………………………………………….ทอย…………………………………………………………………………………………………………………………………………………………..จงหวด……………………………………………………………………………………………………………………………………………………….. รหสไปรษณย…………………………………………………โทรศพท………………………………………………………………………………….. โทรศพทมอถอ………………………………………………..โทรสาร..................................................................................................... E-mail: ………………………………………………………………………………………………………………………………………………………. พรอมนไดจายเงนคาบ ารงสมาชกมาดวยแลว เปนเงน……………………………………………………………บาท
หมายเหต: ทานสามารถช าระเงนไดโดย โอนเงนเขาบญชออมทรพย เลขท 793-254284-5 ชอบญช กลมวจย วศวกรรมฟารมและเทคโนโลยการควบคมอตโนมตธนาคารไทยพาณชย จ ากด (มหาชน) สาขามหาวทยาลยขอนแกน
หากทานด าเนนการโอนเงนเขาบญชแลว โปรดสงหลกฐานการโอนเงน และแจงรายละเอยดในการออกใบเสรจรบเงน มาท Email: [email protected] โทรศพท 097-9939456 หรอ 043-202845 โทรสาร 043-202849 เพอทกลมวจยฯจะไดด าเนนการออกใบเสรจ และสงใหทานตอไป ขอขอบพระคณ
ผสมคร……………………………............................... (.................................................................)
__________________________________________________________________________________ “ วารสารFEAT ” พมพปละ 2 ฉบบ คาบ ารงสมาชกรายปมดงน 1 ป 100 บาท
2 ป 200 บาท 3 ป 300 บาท