
ă ş ţ ş ţ ă ţ ă ţ ă ţ ă ş ă ş ţ ă ţ ă suportul ei f ă ă ţ .... Dr. Ing....
27
Capitolul II. Reducerea sistemelor de forţe Toate operaţiile definite în cadrul algebrei vectorilor liberi prezentate în Capitolul I vor fi extinse în prezentul capitol pentru vectorii alunecători şi legaţi. Acest calcul se deosebeşte de cel specific vectorilor liberi; operaţiile definite pentru vectori liberi, vor trebui efectuate în cazul vectorilor alunecători în punctul comun de intersecţie al suporturilor vectorilor alunecători, iar în cazul vectorilor legaţi, în punctul comun de aplicaţie al vectorilor respectivi. Calculul vectorial se aplică atât forţelor care acţionează asupra corpurilor cât şi altor mărimi care pot fi reprezentate prin vectori alunecători şi legaţi. Referitor la forţele ce acţionează corpurilor, acestea vor fi reprezentate fie prin vectori alunecători, fie prin vectori legaţi. Spre exemplu: forţele care acţionează asupra unui corp rigid pot fi reprezentate prin vectori alunecători ; punctul de aplicaţie al unei forţe poate fi deplasat pe suportul ei fără ca efectul pe care forţa îl are asupra corpului rigid să se schimbe; forţele care acţionează asupra unui corp asimilat cu un punct material pot fi reprezentate prin vectori legaţi . Momentul unui vector în raport cu un punct . F Momentul unui vector legat în raport cu polul 0 (sau momentul polar al vectorului F ) se defineşte ca produsul vectorial dintre vectorul de poziţie al punctului de aplicaţie al vectorului F şi vectorul F . F A 0 F r ) F ( M 0 (2.1) 1
Transcript of ă ş ţ ş ţ ă ţ ă ţ ă ţ ă ş ă ş ţ ă ţ ă suportul ei f ă ă ţ .... Dr. Ing....
Capitolul II. Reducerea sistemelor de forţe
Toate operaţiile definite în cadrul algebrei vectorilor liberi prezentate în
Capitolul I vor fi extinse în prezentul capitol pentru vectorii alunecători şi
legaţi. Acest calcul se deosebeşte de cel specific vectorilor liberi; operaţiile
definite pentru vectori liberi, vor trebui efectuate în cazul vectorilor
alunecători în punctul comun de intersecţie al suporturilor vectorilor
alunecători, iar în cazul vectorilor legaţi, în punctul comun de aplicaţie al
vectorilor respectivi. Calculul vectorial se aplică atât forţelor care acţionează
asupra corpurilor cât şi altor mărimi care pot fi reprezentate prin vectori
alunecători şi legaţi.
Referitor la forţele ce acţionează corpurilor, acestea vor fi reprezentate
fie prin vectori alunecători, fie prin vectori legaţi. Spre exemplu:
forţele care acţionează asupra unui corp rigid pot fi reprezentate prin
vectori alunecători; punctul de aplicaţie al unei forţe poate fi deplasat pe
suportul ei fără ca efectul pe care forţa îl are asupra corpului rigid să se
schimbe;
forţele care acţionează asupra unui corp asimilat cu un punct material
pot fi reprezentate prin vectori legaţi.
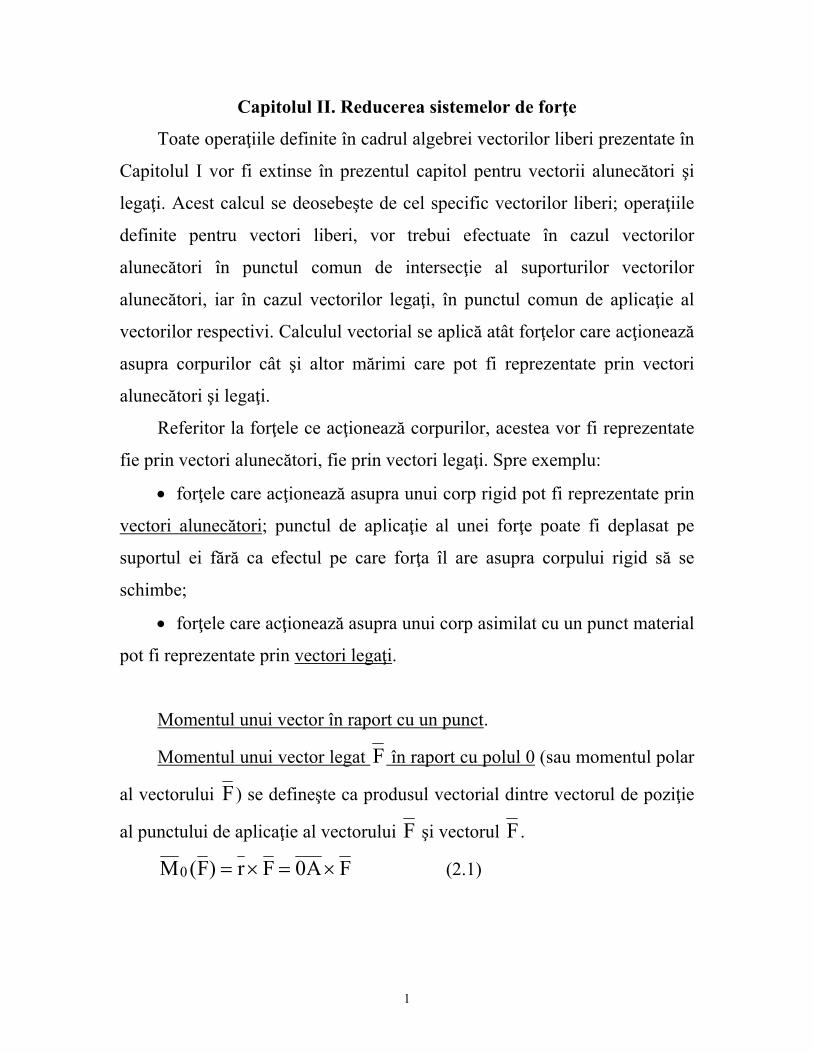
Momentul unui vector în raport cu un punct.
FMomentul unui vector legat în raport cu polul 0 (sau momentul polar
al vectorului F) se defineşte ca produsul vectorial dintre vectorul de poziţie
al punctului de aplicaţie al vectorului F şi vectorul F.
FA0Fr)F(M0 (2.1)
1
0M
F
0r A
Fig. 2.1.
0 0
r
r
B B
A A
F F
C
0M 0M
b
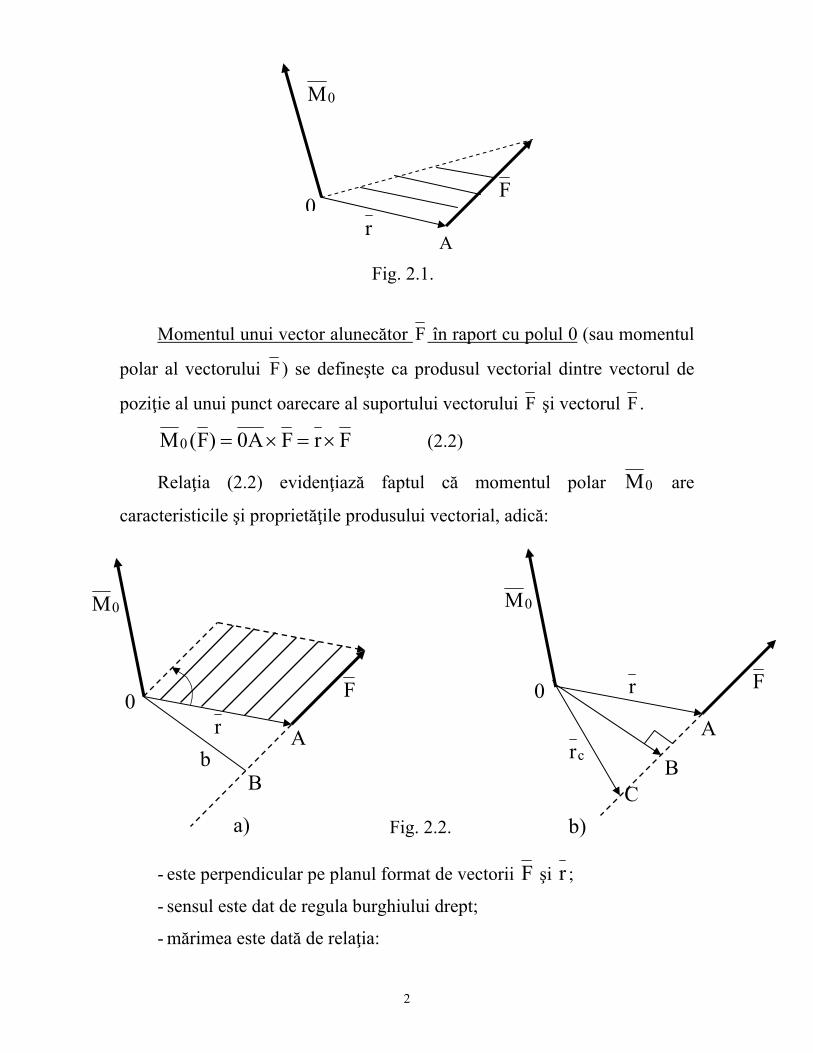
a) b) Fig. 2.2.
cr
Momentul unui vector alunecător F în raport cu polul 0 (sau momentul
polar al vectorului F) se defineşte ca produsul vectorial dintre vectorul de
poziţie al unui punct oarecare al suportului vectorului F şi vectorul F .
FrFA0)F(M0 (2.2)
Relaţia (2.2) evidenţiază faptul că momentul polar 0M are
caracteristicile şi proprietăţile produsului vectorial, adică:
- este perpendicular pe planul format de vectorii F şi r ;
- sensul este dat de regula burghiului drept;
- mărimea este dată de relaţia:
2
FbF,rsinFrM (2.3)
unde b este braţul: mărimea perpendicularei dusă din pol pe suportul
vectorului F (fig. 2.2.a);
- este nul atunci când suportul vectorului trece prin pol.
Proprietăţile momentului polar.
1. Momentul polar al unui vector alunecător nu se modifică dacă
vectorul glisează pe suportul său. Acest lucru rezultă din definiţia
momentului polar; dacă vectorul F alunecă pe suportul său astfel încât
punctul său de aplicaţie din A ajunge în C, atunci se pot scrie relaţiile:
FC0FCAFC0FCAC0FA0 ,
vectorii CA şi F fiind coliniari ( FCA ), produsul lor vectorial este nul
(fig. 2.2.b).
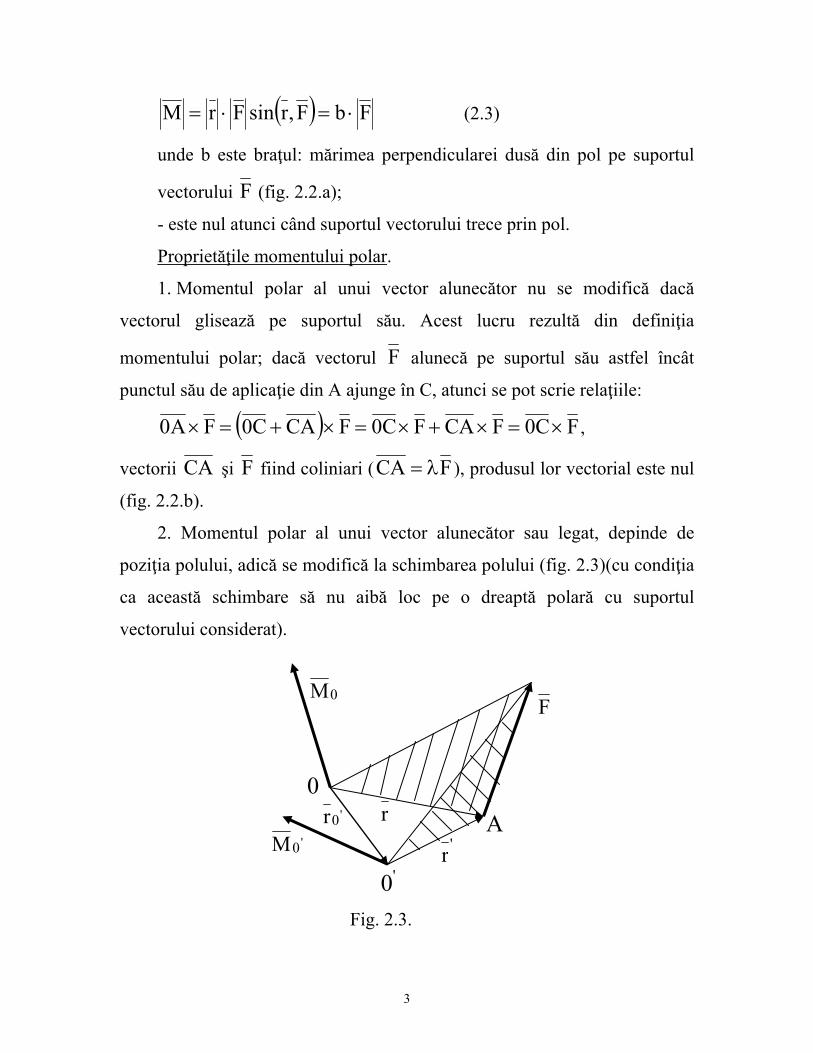
2. Momentul polar al unui vector alunecător sau legat, depinde de
poziţia polului, adică se modifică la schimbarea polului (fig. 2.3)(cu condiţia
ca această schimbare să nu aibă loc pe o dreaptă polară cu suportul
vectorului considerat).
0M
0
0'
'0M
'0r r'
r
A
F
Fig. 2.3.
3

FrFrFrrFrM ''' 00'
0 ;
FrMM '00'
0 (2.4)
Formula (2.4) de variaţie a momentului polar la schimbarea polului
conduce la concluzia că momentul polar este un vector legat.
Dacă Fr '0 , arunci 00 MM ' , adică momentul polar nu se
modifică dacă schimbarea polului are loc după o direcţie paralelă cu suportul
vectorului considerat.
3. Produsul scalar dintre 0M şi F este nul:
0FM0 (2.5)
Deoarece momentul 0M al vectorului Feste perpendicular pe vectorul F.
Expresia analitică a momentului polar.
a) Cazul spaţial.
Momentul polar al unui vector ce are o orientare oarecare în spaţiu, se
calculează în funcţie de proiecţiile vectorului ZYX F,F,FF pe axele reperului
0xyz şi de coordonate x, y, z ale unui punct A de pe suportul său (în particular
punctul de aplicaţie al vectorului) (fig. 2.4).
x
z
y0
0M A(x,y,z)
Fig. 2.4.
F
4

kyFxFjxFzFizFyF
FFF
zyx
kji
FA0FrM xyzxyz
zyx
0
kMjMiM zyx (2.6)
Proprietăţile momentului polar pe axe se numesc momentele axiale ale
vectorului F în raport cu axele de coordonate şi are următoarele expresii:
yzx zFyFiMM ; zxy xFzFjMM ; zyz yFxFkMM (2.7)
Relaţia de ortogonalitate între vectorul F şi momentul său 0M se
exprimă analitic prin expresia:
0FMFMFMFM zzyyxx (2.8)
Cu ajutorul momentelor axiale (a proiecţiilor momentului polar pe
axele reperului 0xyz) se pot determina mărimea şi cosinusurile lui directoare
care precizează orientarea sa în reperul 0xyz:
2z
2y
2x0 MMMM (2.9)
M
M)i,Mcos( x
0 ; M
M)j,Mcos( y
0 ; M
M)k,Mcos( z
0 ;
b) Cazul plan.
Dacă se consideră vectorul F situat în planul de coordonate 0xy
jFiFF yx ; jyixrA0 atunci momentul său faţă de polul
axelor va fi orientat după axa 0z (fig. 2.5.), adică:
kMkyFxF
0FF
0yx
kji
FrFA0M zxy
yx
0 (2.10)
5
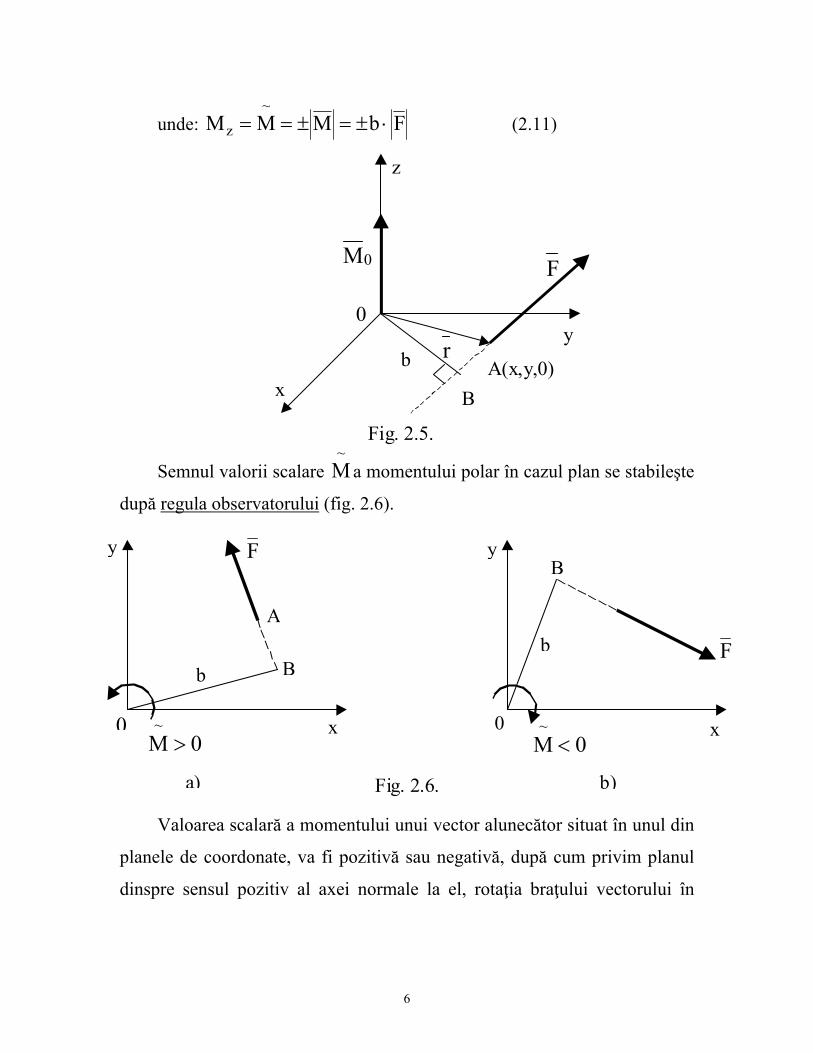
FbMM~
z M (2.11) unde:
x
z
y0
0M
A(x,y,0)
Fig. 2.5.
B
b r
F
Semnul valorii scalare a momentului polar în cazul plan se stabileşte
după
~M
regula observatorului (fig. 2.6).
0 0x x
y y
0M~ 0M
~
B
B
A
b
F
b F
a) b)Fig. 2.6.
Valoarea scalară a momentului unui vector alunecător situat în unul din
planele de coordonate, va fi pozitivă sau negativă, după cum privim planul
dinspre sensul pozitiv al axei normale la el, rotaţia braţului vectorului în
6

jurul polului considerat, efectuată în sensul indicat de vector, are sensul
trigonometric (fig. 2.6.a) sau orar (fig. 2.6.b).
În concluzie, dacă vectorul F este situat în planul de coordonate 0xy,
momentul polar se va calcula cu relaţia:
kFbkMM~
(2.12)
dacă se cunosc mărimea vectorului F şi braţul b, sau cu relaţia:
kMkyFxFFrM~
xy (2.13)
dacă se cunosc proiecţiile vectorului yx F,FF şi coordonatele unui
punct de pe suport, A(x,y,0).
Se mai fac următoarele precizări:
deoarece în cazul plan nu se figurează o a treia axă (exp. 0z),
valoarea scalară a momentului se reprezintă printr-o săgeată curbilinie care
indică sensul de rotaţie al braţului b în jurul polului în sensul indicat de
vectorul F (fig. 2.6.a, sens antiorar pentru >0; fig. 2.6.b, sens orar pentru
<0;);
~M
~M
regula observatorului este în deplină concordanţă cu regula
burghiului drept considerat situat perpendicular pe planul vectorului F şi
este rotit în sensul indicat de sensul vectorului F, sensul de înaintare al
burghiului indicând sensul vectorului moment.
7

Sisteme de vectori.
Torsorul unui sistem de vectori.
Se consideră un sistem n,....,2,1iFS i de n vectori
alunecători cu suporturile trecând prin punctele )n.....1i(Ai sau un
sistem de vectori legaţi cu punctele de aplicaţie A )n.....1i(i şi un pol 0.
Pentru acest sistem S de vectori se vor defini: vectorul rezultant şi
vectorul moment rezultant 0M .
1. Vectorul rezultant (sau rezultantă) este definit de relaţia:
n
1iiF (2.14)
în care vectorii )n....1i(Fi din sistem sunt consideraţi liberi.
Vectorul rezultant al unui sistem de vectori este egal cu suma
geometrică a vectorilor din sistem, consideraţi liberi.
Din relaţia (2.14) se determină expresia analitica a vectorului rezultant:
kFjFiFkFjFiFF
n
1iiz
n
1iiy
n
1iix
n
1iiziyix
n
1ii
kji zyx (2.15)
cu ajutorul căreia se pot preciza mărimea, direcţia şi sensul rezultantei :
2z
2y
2x (2.16)
şi
xi,cos ;
yj,cos ;
zi,cos (2.17)
8

2. Vectorul moment rezultant 0M în polul 0 definit de relaţia:
n
1iii
n
1ii0 FrM 0M (2.18)
în care vectorii n....1iM 0i sunt vectori legaţi, )n....1i(ri sunt
vectorii de poziţie ale punctelor )n....1i(Ai .
Vectorul moment rezultant 0M al unui sistem de vectori în raport cu
polul 0 este egal cu suma geometrică a momentelor vectorilor faţă de acelaşi
pol.
Din relaţia (2.18) se poate determina expresia analitică a momentului
rezultant:
kMjMiMkMjMiMM
n
1iiz
n
1iiy
n
1i
n
1iixiziyix
n
1ii0 0
M
kji zyx MMM (2.19)
care va permite determinarea mărimii şi orientării vectorului moment
rezultant 0M :
2z
2y
2x0 MMMM (2.20)
şi M
Mi,Mcos x ;
M
Mj,Mcos y ;
M
Mk,Mcos z ; (2.21)
9

Cu ajutorul proiecţiilor vectorilor iziyixi F,F,FF care compun
sistemul şi ale proiecţiilor momentelor polare ale lor iziyixi M,M,MM
se pot calcula proiecţiile vectorilor şi 0M :
;F
;F
;F
n
1iizz
n
1iiyy
n
1iixx
n
1iizz
n
1iiyy
n
1iixx
0
M
M
M
M
M
M
M (2.22)
Torsorul în polul 0 al unui sistem de vectori alunecători sau legaţi este
format din vectorul rezultant şi vectorul moment rezultant 0M şi se
notează:
0
0 STM
(2.23)
Pentru acest sistem de vectori se mai poate calcula şi produsul scalar
dintre componentele torsorului şi 0M :
zzyyxx RRRR0S MMMM (2.24)
numit scalarul tronsonului în polul 0 sau trinom invariant.
0R M , vectorii şi 0M nu sunt perpendiculari între ei;
0R M , vectorii şi 0M sunt ortogonali;
10

Caracteristicile în polul 0 ale sistemului S de vectori alunecători sau
legaţi sunt:
, vectorul rezultant;
0M , vectorul moment rezultant;
MR scalarul torsorului sau trinom invariant;
Aceste caracteristici au un rol important în rezolvarea problemelor de
reducere a sistemelor de vectori.
Variaţia torsorului unui sistem de vectori la schimbarea polului.
Vectorul rezultant rămâne neschimbat, fapt ce rezultă din formula
de definiţie a acestuia:
'
)0()0( ' (2.25)
Vectorul rezultat este un vector liber.
Vectorul moment rezultant '0M faţă de noul pol 0’ se modifică după
relaţia: Rr '' 000 MM ( Rr '0 ) (2.26)
afirmaţie confirmată de o scurtă demonstraţie:
RrFrMFrMM ''''''' 00
n
1ii0
n
1i0i
n
1ii00i
n
1i0i0
MM
În relaţia (2.26) pentru 0 , rezultă 00' MM .
11

Dacă vectorul rezultant al unui sistem de vectori este nul, momentul
rezultant M este invariant la schimbarea polului, deci este un vector liber.
Invarianţii unui sistem de vectori.
Invarianţii unui sistem de vectori sunt mărimi vectoriale şi scalare care
nu se modifică la schimbarea polului.
1. Vectorul rezultant este un invariant (relaţia 2.25), fapt ce rezultă din
formula lui de definiţie, în care acesta se consideră vector liber.
11 I;I (2.27)
2. Scalarul torsorului este un invariant:
MRI2 (2.28)
deoarece:
''''' 000000 RRrRRRrRR MMMM
3. Raportul primilor doi invarianţi scalari este tot un invariant:
MMMM
RR1
23 pri
R
R
R
R
I
II (2.29)
unde:
i este versorul rezultantei.
Relaţia (2.29) conduce la o concluzie importantă şi anume: la trecerea
de la un pol la altul, proiecţia momentului rezultant este un invariant.
12
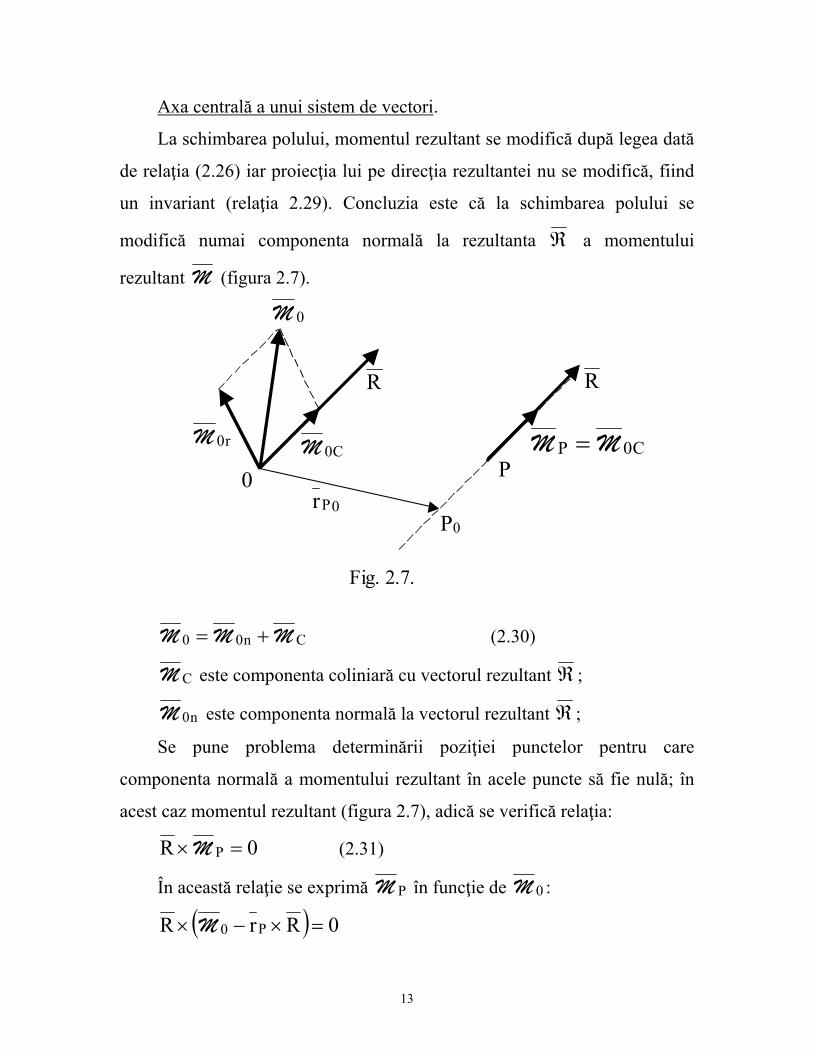
Axa centrală a unui sistem de vectori.
0
0M
R
0PrP0
P
R
Fig. 2.7.
r0MC0M C0P MM
La schimbarea polului, momentul rezultant se modifică după legea dată
de relaţia (2.26) iar proiecţia lui pe direcţia rezultantei nu se modifică, fiind
un invariant (relaţia 2.29). Concluzia este că la schimbarea polului se
modifică numai componenta normală la rezultanta a momentului
rezultant M (figura 2.7).
Cn00 MMM (2.30)
CM este componenta coliniară cu vectorul rezultant ;
n0M este componenta normală la vectorul rezultant ;
Se pune problema determinării poziţiei punctelor pentru care
componenta normală a momentului rezultant în acele puncte să fie nulă; în
acest caz momentul rezultant (figura 2.7), adică se verifică relaţia:
0R P M (2.31)
În această relaţie se exprimă PM în funcţie de 0M :
0RrR P0 M
13

Se efectuează dezvoltarea şi se notează 2pr
, obţinându-se astfel
ecuaţia verticală a unei drepte orientate:
RR
Rr
20
M (2.32)
Această axă se numeşte axa centrală a sistemului de vectori alunecători,
este paralelă sau coliniară cu rezultanta , trece prin punctul P. determinat
de vectorul de poziţie:
20
P
R
Rr
M (2.33)
cu direcţia perpendiculară pe .
Din figura (2.7) se observă că:
02
n02
C0CminP MMMMMM (2.34)
Axa centrală a unui sistem de vectori alunecători reprezintă:
- locul geometric al punctelor în care vectorul rezultant şi momentul
rezultant sunt coliniari;
- locul geometric al punctelor în care momentul rezultant are valoare
minimă (după cum rezultă din relaţia 2.34).
Din expresia analitică a ecuaţiei vectoriale (2.32) se obţin ecuaţiile
scalare alei axei centrale:
x0xyzzy2RxRRR
R
1x MM
y0yzxxz2RyRRR
R
1y MM (2.35)
14

z0zxyyx2RzRRR
R
1z MM
cu următoarea formă canonică:
z
0
y
0
x
0 zzyyxx
(2.36)
Momentul minim (diferit de zero) va avea următoarea expresie
vectorială:
R
R
R
RiRC0C0Pmin
MMMMM ;
RR
R2minM
M (2.37)
Rezultanta şi momentul minim minM formează torsorul minimal al
sistemului de vectori:
RR
R
FR
)S(T
20
min
n
1ii
min
MM
(2.38)
Precizări.
a) Dacă 0R 0 M atunci R,0 minmin MM (momentul
minim este coliniar cu rezultanta).
b) Dacă 0
0,0R 0
M ; 0 (momentul rezultant este
perpendicular pe rezultantă); atunci
R 0 M
0min M ; în acest caz axa centrală se
15
defineşte ca locul geometric al punctelor din spaţiu în care momentul
rezultant are valoarea minimă zero.
c) Dacă 0 , noţiunea de axă centrală nu are sens.
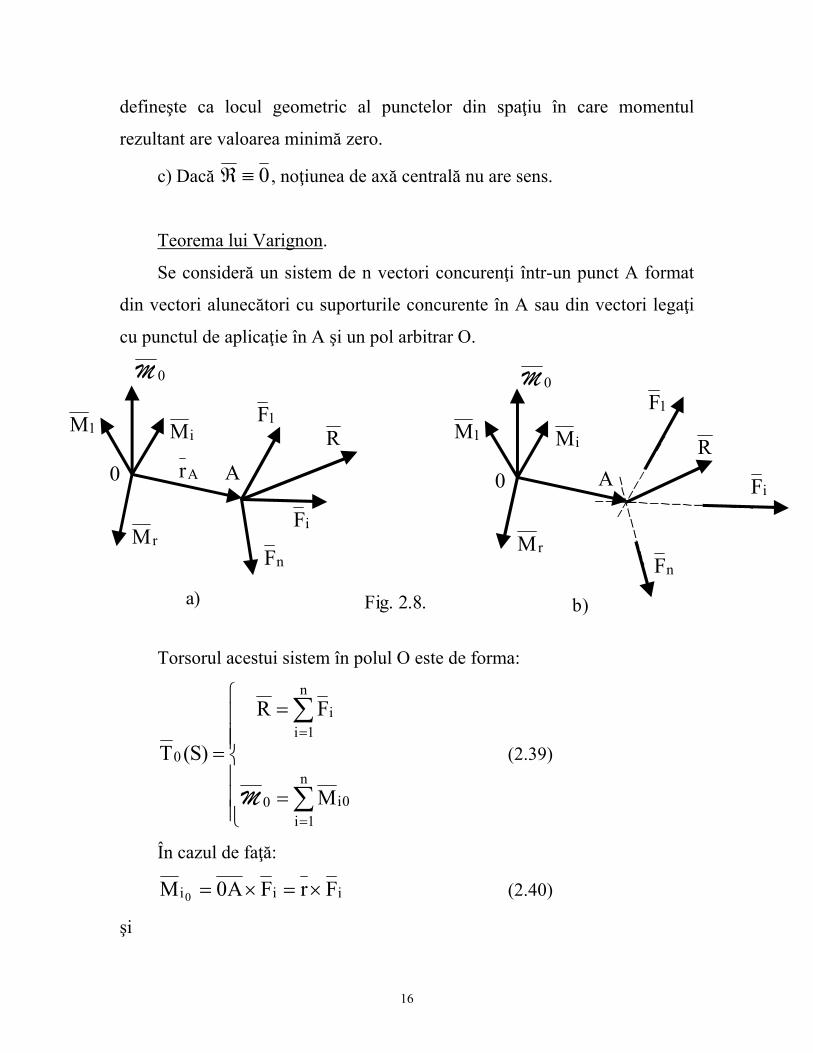
Teorema lui Varignon.
iM
0M
1M
0
rM
A
1F
iF
nF
R
b)
iM
0M
1M
0
rM
A
1F
iF
nF
R
a)
Ar
Fig. 2.8.
Se consideră un sistem de n vectori concurenţi într-un punct A format
din vectori alunecători cu suporturile concurente în A sau din vectori legaţi
cu punctul de aplicaţie în A şi un pol arbitrar O.
Torsorul acestui sistem în polul O este de forma:
n
1i0i0
n
1ii
0
M
FR
)S(T
M
(2.39)
În cazul de faţă:
iii FrFA0M 0 (2.40)
şi
16
RrFA0Mn
1ii
n
1i0i0
M (2.41)
RM00 M
Relaţia obţinută exprimă Teorema lui Varignon cu următoarea
formulare:
Momentul rezultant faţă de un pol oarecare al unui sistem de vectori
concurenţi într-un punct este egal cu momentul rezultantei calculat în raport
cu acelaşi pol.
Dacă polul este situat pe suportul rezultantei atunci momentul rezultant
este nul. La acest sistem de vectori, rezultanta şi momentul rezultant sunt doi
vectori ortogonali:
0R 0 M (2.42)
Echivalenţa sistemelor de vectori alunecători.
Definiţie: două sisteme de vectori alunecători se numesc echivalente
atunci când, evoluând în condiţii identice, au acelaşi efect al acţiunii lor (în
consecinţă pot fi înlocuite unul prin celălalt).
Operaţia de reducere a sistemului de vectori alunecători considerat,
înseamnă operaţia de înlocuire a unui sistem complex de vectori alunecători
cu sistemul echivalent cel mai simplu posibil.
Pentru a înţelege operaţia de reducere a sistemelor de vectori
alunecători e necesar să se prezinte următoarele probleme:
a) formularea principiului de echivalenţă;
b) caracterizarea sistemelor simple de vectori alunecători;
c) formularea teoremei de echivalenţă.
17
a) Formularea principiului de echivalenţă.
Două sisteme de vectori alunecători sunt echivalente atunci când se pot
transforma unul în celălalt numai prin efectuarea a două operaţii elementare
de echivalenţă:
1. înlocuirea a doi vectori cu raporturile concurente printr-un vector
unic după regula paralelogramului, sau descompunerea unui vector în două
componente cu suporturile concurente într-un punct de pe suportul
vectorului considerat;
2. adăugarea sau suprimarea unei perechi de vectori direct opuşi
(vectori situaţi pe acelaşi suport, de aceeaşi mărime, şi sensuri contrare).
Aceste două operaţii elementare de echivalenţă nu modifică mărimile
, 0M şi 0R M , fapt ce justifică denumirea acestora de caracteristici ale
sistemului de vectori alunecători.
b) Caracteristicile sistemelor simple de vectori alunecători.
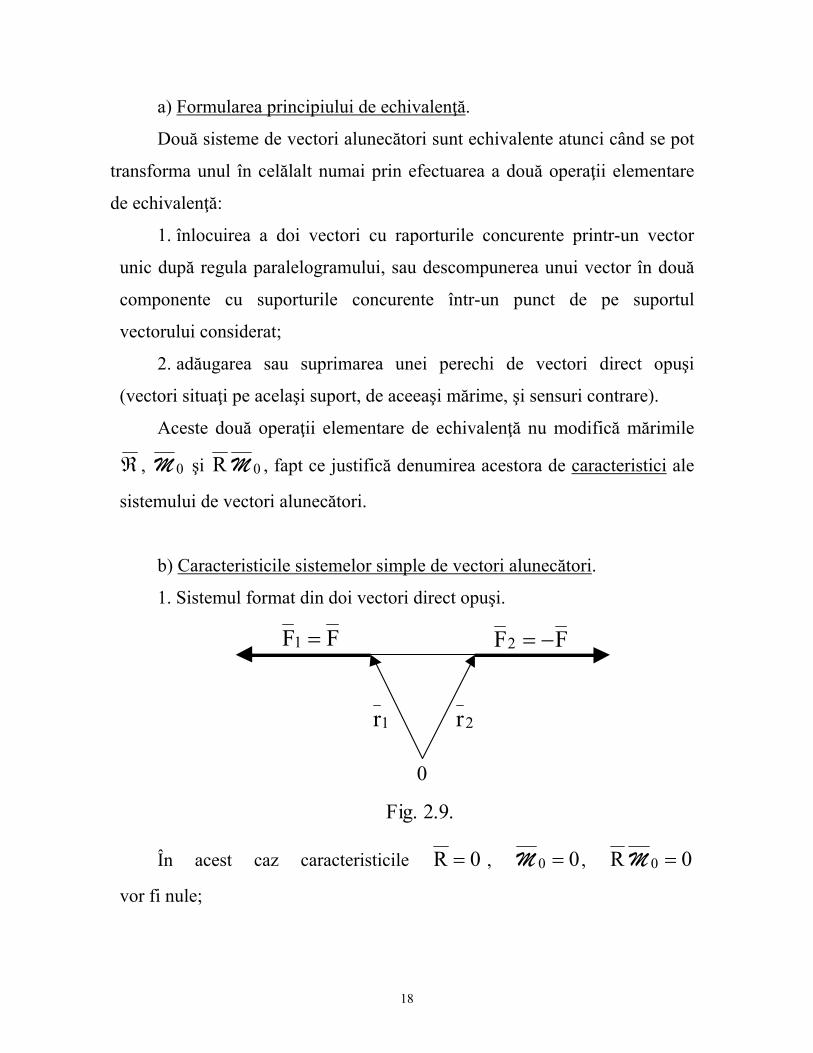
1. Sistemul format din doi vectori direct opuşi.
0
2r1r
FF2 FF1
Fig. 2.9.
În acest caz caracteristicile 0R , 00 M , 0R 0 M
vor fi nule;
18
1 2
1 1 2 2 1 2 1 20
0
0
0
0 (2.43)
R F F F F
r F r F r F r F r r F F F
R
M
M
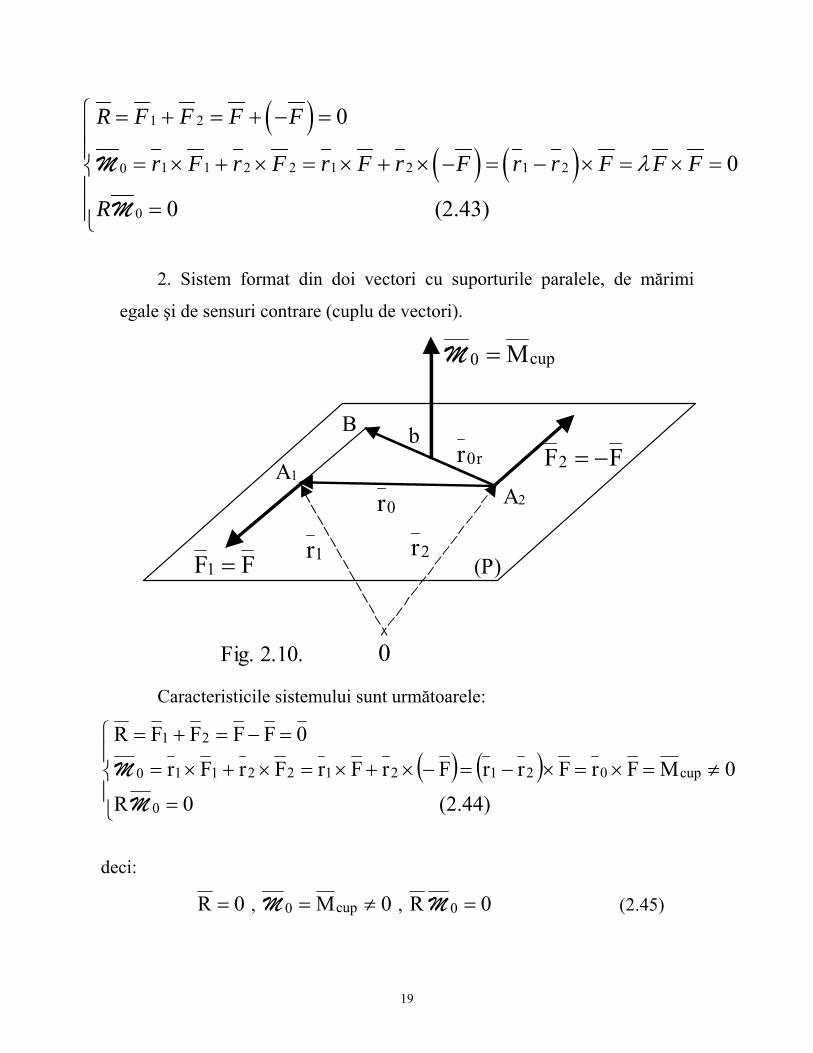
2. Sistem format din doi vectori cu suporturile paralele, de mărimi
egale şi de sensuri contrare (cuplu de vectori).
0
(P)
0r
1r 2r
A1
A2
FF1
FF2
cup0 MM
B br0r
Fig. 2.10.
Caracteristicile sistemului sunt următoarele:
(2.44)0R
0MFrFrrFrFrFrFr
0FFFFR
0
cup0212122110
21
M
M
deci:
0R , 0Mcup0 M , 0R 0 M (2.45)
19
Momentul rezultant cup0 MM numit şi momentul cuplului are
expresia vectorială:
FrM 0cup0 M (2.46)
şi mărimea
0FbMcup (2.47)
Rezultă că momentul cuplului este un vector liber ( b,r0 şi F nu
depind de pol).
Din aceeaşi relaţie de calcul a lui cupM mai rezultă:
- momentul cuplului este normal la planul cuplului (planul determinat
de vectorii F,F );
- sensul momentului respectă regula burghiului drept cu privire la
sensurile vectorilor cuplului.
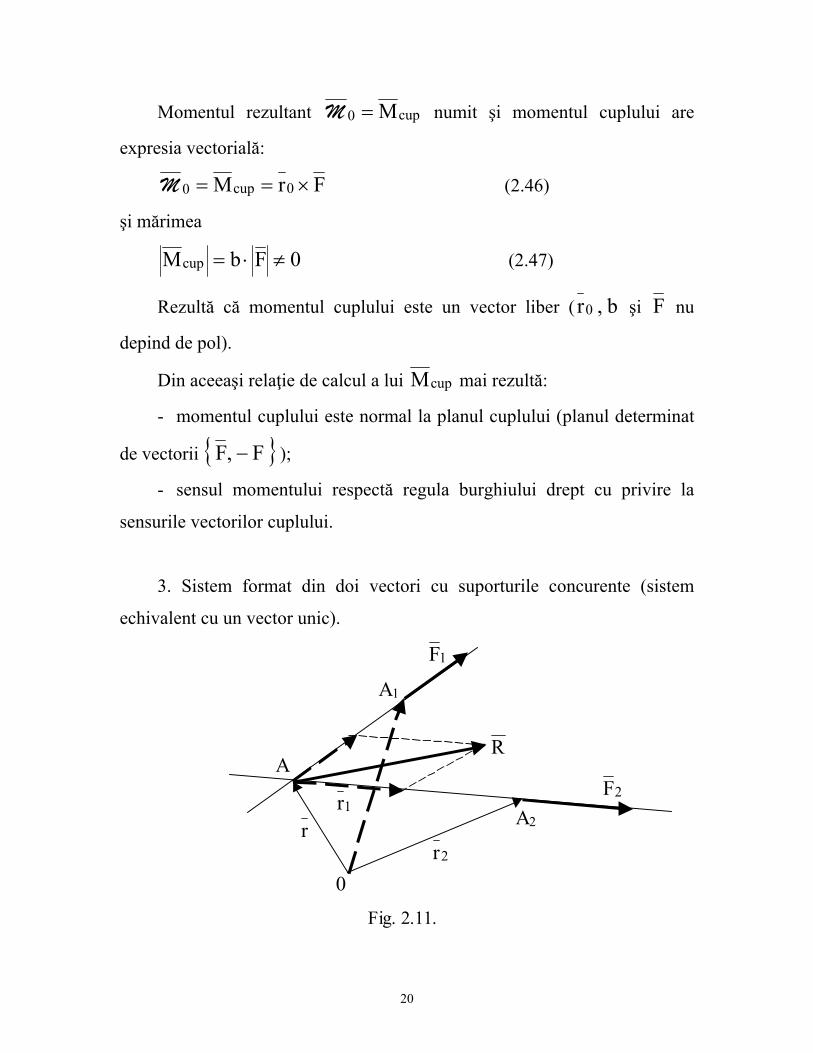
3. Sistem format din doi vectori cu suporturile concurente (sistem
echivalent cu un vector unic).
0
r1r
2r
R
A1
A
A2
1F
2F
Fig. 2.11.
20

Caracteristicile sistemului sunt următoarele:
0RrRR
RMRrFFrMM
0FFR
0
021210
21
M
M (2.48)
Acest sistem, cu caracteristicile date de relaţiile (2.48) este echivalent
cu un vector unic (sau rezultantă unică):
0R
0
0RM
0R
0
00
M
M (2.49)
Relaţia (2.48)2 exprimă teorema lui Varignon aplicabilă la acest sistem
de vectori:
RMRr 00 M (2.50)
Deoarece 0R şi 0R 0 M , axa centrală este locul geometric al
punctelor de moment minim egal cu zero; ea coincide cu suportul
rezultantei.
Torsorul minimal are expresia:
0RR
R
0R
)S(T2
0min
min MM
(2.51)
21
0'
0
R
2FA2
A1
1F
' 2 r '
0r
Fig. 2.12.
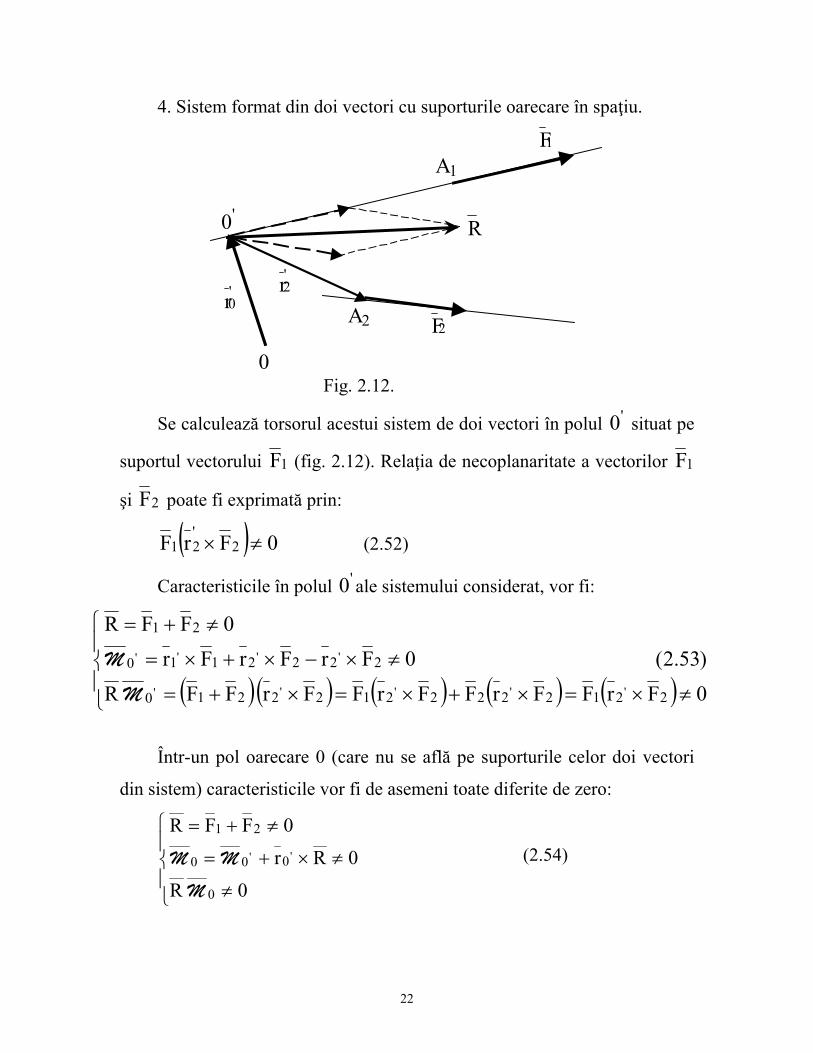
4. Sistem format din doi vectori cu suporturile oarecare în spaţiu.
Se calculează torsorul acestui sistem de doi vectori în polul situat pe
suportul vectorului
'0
1F (fig. 2.12). Relaţia de necoplanaritate a vectorilor 1F
şi 2F poate fi exprimată prin:
0FrF 2'21 (2.52)
Caracteristicile în polul ale sistemului considerat, vor fi: '0
0FrFFrFFrFFrFFR
)53.2(0FrFrFr
0FFR
22122222122210
2222110
21
'''''
''''
M
M
Într-un pol oarecare 0 (care nu se află pe suporturile celor doi vectori
din sistem) caracteristicile vor fi de asemeni toate diferite de zero:
0R
0Rr
0FFR
0
000
21
''
M
MM (2.54)
22

Torsorul minimal al sistemului
0RR
R
0FFR
)S(T2min
21
min MM
(2.55)
- vectorul rezultant R ca invariant la schimbarea polului;
- momentul rezultant 0M în baza relaţiei (2.49)2 explicabilă din cauză
că egalitatea cu zero ar implica coliniaritatea vectorilor '0M şi Rr '0 şi
deci ortogonalitatea vectorilor '0M şi R , contrazisă de relaţia (2.48)3
0R '0 M ;
- scalarul torsorului 0R M ca invariant la schimbarea polului.
Axa centrală a acestui sistem de vectori este locul geometric al
punctelor în care vectorul rezultant şi momentul rezultant sunt coliniari
(momentul rezultant are valoare minimă diferită de zero).
c) Teorema de echivalenţă.
Reducerea unui sistem de vectori alunecători este justificată prin
teorema de echivalenţă: “Două sisteme de vectori alunecători sunt
echivalente între ele atunci când au acelaşi torsor (sau aceleaşi caracteristici)
într-un pol arbitrar”.
Reducerea sistemelor de vectori alunecători.
Teorema de echivalenţă conduce la concluzia că operaţia de înlocuire a
unui sistem de vectori alunecători cu unul din cele patru sisteme simple de
vectori care să fie echivalent cu el se reduce la:
- calculul componentelor torsorului într-un pol oarecare al acestui
sistem (respectiv a caracteristicilor sistemului);
23
- compararea acestor componente cu cele corespunzătoare sistemelor
simple de vectori alunecători.
Cazul spaţial.
Calculând torsorul în 0 al unui sistem de vectori, se pot ivi următoarele
patru situaţii:
I. Sistem echivalent cu zero:
0R , 00 M , 0R 0 M (2.56)
II. Sistem reductibil la un cuplu de vectori:
0R , 0Mcup0 M , 0R 0 M (2.57)
III. Sistem echivalent cu un vector unic (sau rezultantă unică):
0R , 0
00
M , 0R 0 M (2.58)
Axa centrală coincide cu suportul rezultantei şi are ecuaţia:
RR
Rr
20
M când 00M (2.59)
şi
Rr când 00 M (2.60)
suportul rezultantei trecând prin pol.
Torsorul minimal:
0RR
R
0R
)S(T2min
min MM
(2.61)
IV. Sistem reductibil la un torsor propriu-zis:
0R , 00 M , 0R 0 M (2.62)
24
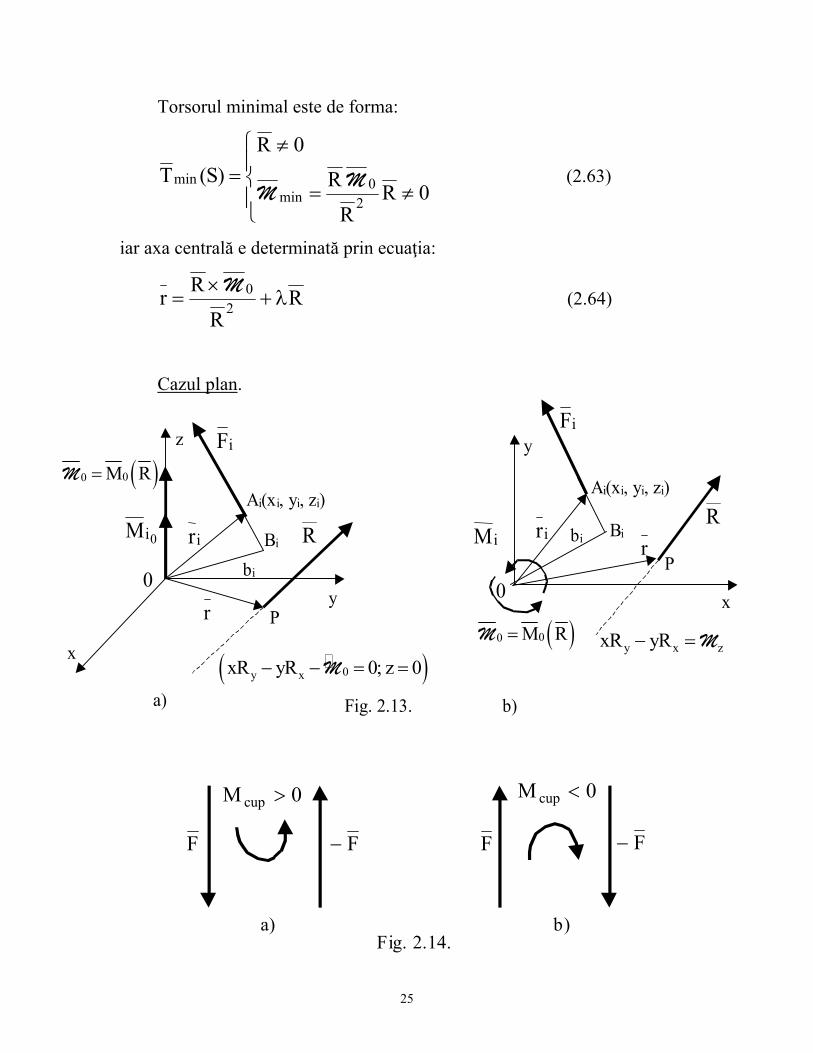
Torsorul minimal este de forma:
0RR
R
0R
)S(T2
0min
min MM
(2.63)
iar axa centrală e determinată prin ecuaţia:
RR
Rr
20
M (2.64)
x
z
y
0
0 i M
P
a)
0y xxR yR 0; z 0 M
r
R
00 M RM
i r
b i
B i
A i ( x i , y i , z i )
i F y
x 0
i M
P
b)
y x zxR yR M
r
R i r b i B i
A i ( x i , y i , z i)
i F
00 M RM
Fig. 2.13.
Cazul plan.
F F F F
0M cup 0M cup
a) b)Fig. 2.14.
25

Se consideră sistemul de vectori coplanari n...,,2,1iFS i
situaţi într-un plan de coordonate, spre exemplificare în planul 0xy
(fig.2.13); fiecare vector iF din sistem va avea expresia analitică şi
momentul polar de forma:
jFiFF iyixi ; kFbkMM iiizi0 (2.65)
Caracteristicile sistemului dat vor avea următoarele expresii:
jFiFFRn
1iiy
n
1iix
n
1ii
kMMn
1ii
~n
1ii0 00
M (2.66)
0R 0 M
Sunt posibile următoarele cazuri de reducere:
I. 0R ; 00 M – sistem echivalent cu zero;
II. 0R ; 0Mcup0 M – sistem echivalent cu un cuplu;
Momentul cuplului cupM este un vector perpendicular pe planul
figurii; precizarea sensului lui cupM ectuează printr-o săgeată curbilinie
ce indică sensul de rotaţie al burghiului drept, situat perpendicular pe planul
cuplului, sub acţiunea cuplului respectiv (fig. 2.14.).
se ef
III. R 0 ; 0
00
M – sistem echivalent cu un vector unic, al cărui
suport coincide cu axa centrală de ecuaţie:
0
~
xy yRxR M (2.67)
obţinută prin efectuarea următoarelor calcule:
26

kkyRxR
0RR
0yx
kji
RrRM 0
~
xy
yx
00 MM (2.68)
Momentul minim minM este nul.
27


















