二次元画像処理 - vislab.jp · 二値画像処理(教科書5章) " 画像を「白」と「黒」だけで扱う処理! 図形の処理として,もっとも基本的
Upload
haley-frostCategory
view
25download
4description

修士論文発表会 家村光 12012/2/1
動画像処理システムの構築
数理情報科学専攻家村光
修士論文発表会 家村光 22012/2/1
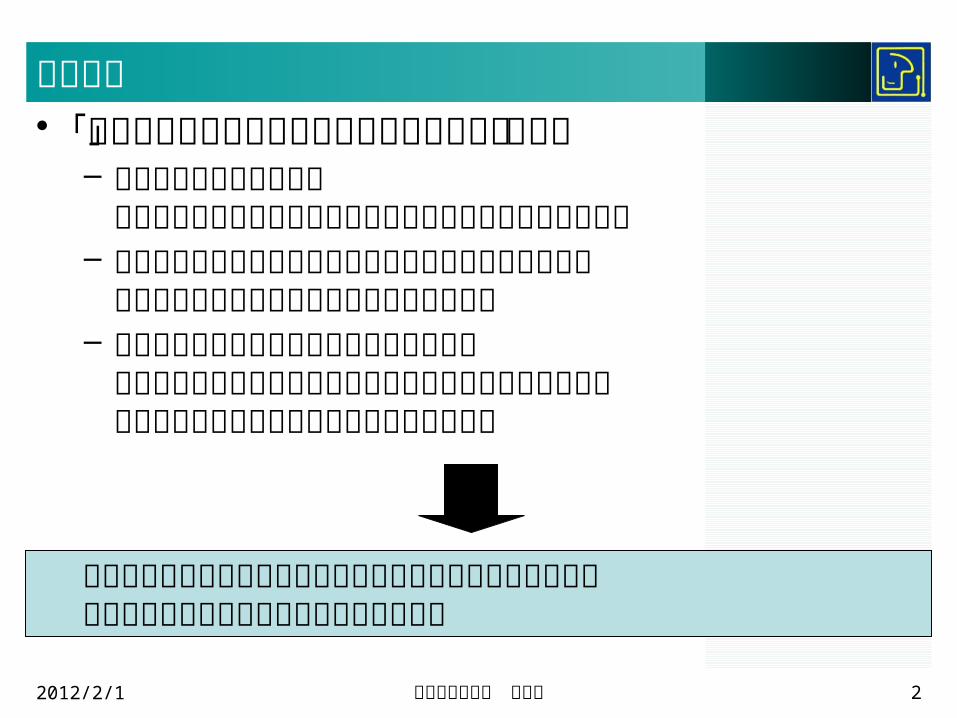
研究背景• 「電動車椅子危険探知および回避システム」の開発– 東京都産業労働局による「都市課題解決のための技術戦略プログラム」に採択された
– 路面には電動車椅子にとっての危険が多数存在するので利用者の安全をシステムによって補助したい
– しかし危険探知システムを利用する人には既に電動車椅子の購入による大きな経済的負担があるため低コストでのシステム開発が求められている電動車椅子にビデオカメラと画像処理用プロセッサを搭載し動画像データの処理のみで危険探知を行う

修士論文発表会 家村光 32012/2/1
電動車椅子にとっての危険とは

修士論文発表会 家村光 42012/2/1
危険探知のために• 危険までの距離に注目
– 進行方向に対する障害物の認識を目的とするが1画像データ (2次元 )では危険までの距離を測れないため正確な危険探知ができない
– 距離の情報を探知に適用するためにステレオカメラを使用
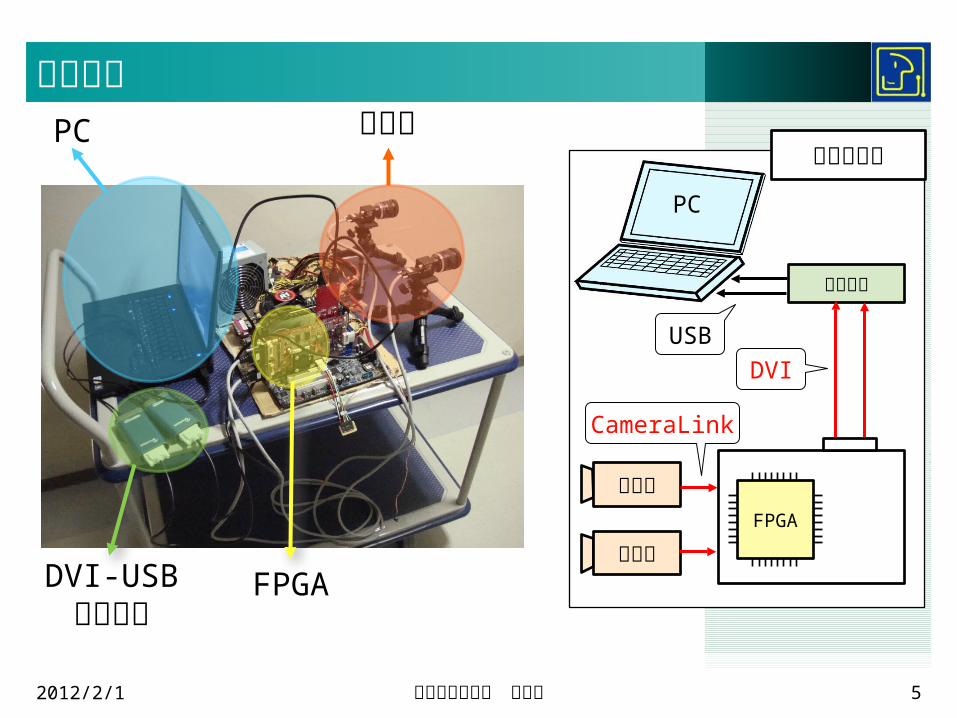
• 開発環境の構築– 条件
• 非圧縮な動画像データが利用可能であること• プログラム解析が可能であること
ステレオ視差法によるプログラムの設計を行った
5
カメラ
FPGA
PC
DVI-USB変換装置
カメラ
FPGA
変換装置
カメラ
PC
ブロック図
CameraLink
DVI
USB
開発環境
2012/2/1 修士論文発表会 家村光
6
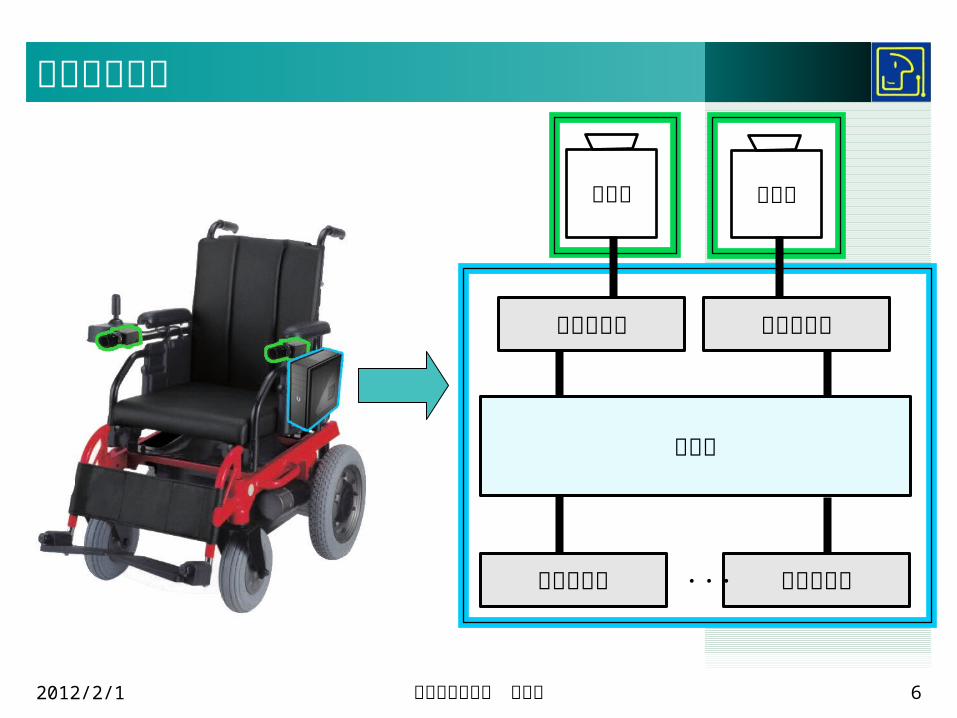
プロセッサ プロセッサ
プロセッサ プロセッサ・・・
ルータ
カメラ カメラ
完成イメージ
2012/2/1 修士論文発表会 家村光
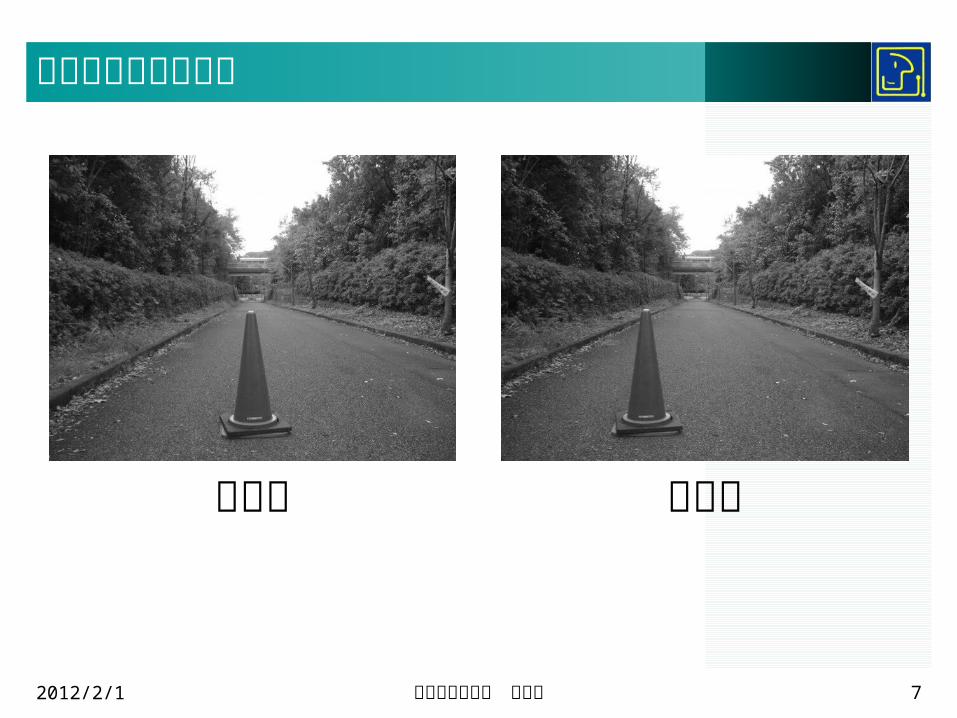
修士論文発表会 家村光 72012/2/1
実際のステレオ画像
右画像左画像

修士論文発表会 家村光 82012/2/1
– であることから として距離を求めることが出来る
視差
stcabc∽△△ZfBD /)(
物体
距離 D
左右のカメラの間隔 B
撮影面焦点距離 f
画像のずれ量 Z(視差 )
t
s
cb
a
左 右
修士論文発表会 家村光 92012/2/1
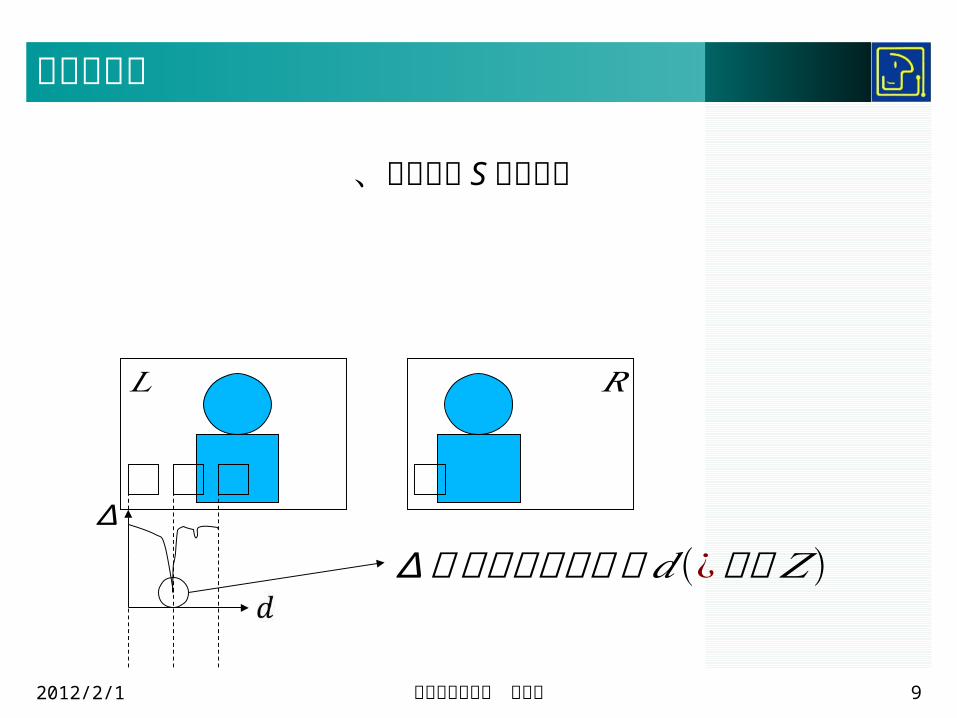
視差の取得
𝑅𝐿
、各小領域 Sに対して
∆が最小となる時の𝑑(¿視差𝑍 )∆
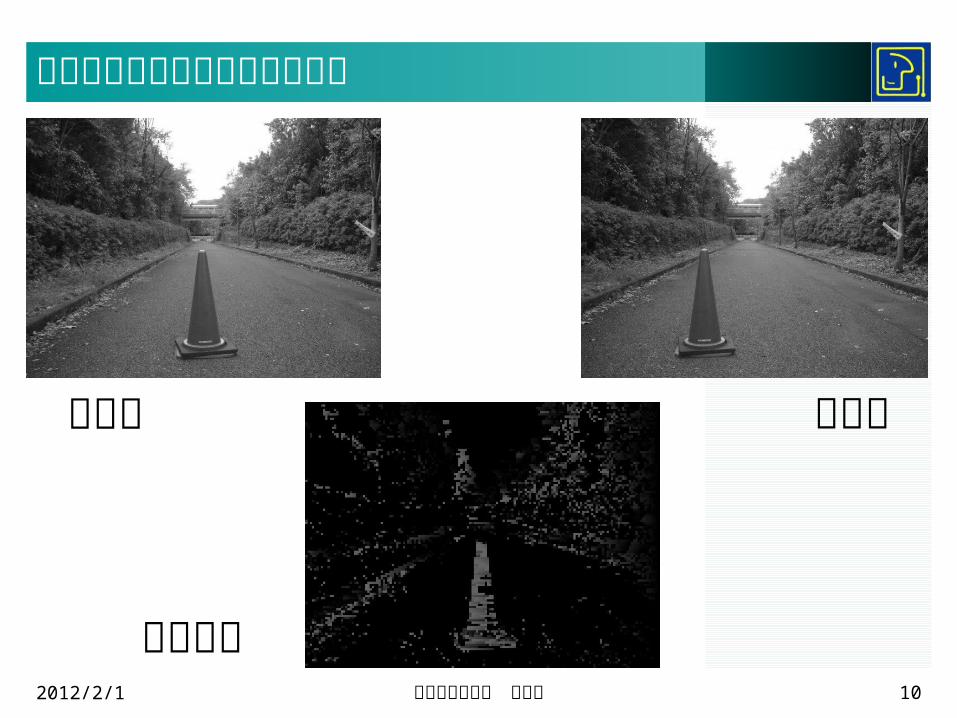
102012/2/1 修士論文発表会 家村光
視差の計算を行った結果の出力
視差画像
左画像 右画像

修士論文発表会 家村光 11
障害物認識アルゴリズムの提案• 近傍処理による誤認識の除去
– 16×16の領域ごとの認識割合によって差異化
2012/2/1

修士論文発表会 家村光 122012/2/1
障害物認識アルゴリズム
入力動画像 視差動画像
修士論文発表会 家村光 132012/2/1
障害物認識アルゴリズム
処理結果を入力動画像にトレース
処理結果

修士論文発表会 家村光 14
• 研究成果– 開発環境の構築
• 非圧縮な動画像データを利用可能• プログラム解析が可能
– 障害物認識アルゴリズム
• 今後– 垂直面や段差への対応– アルゴリズムの定量的評価と改良
• 認識対象との距離精度を評価• 誤認識の割合を軽減
2012/2/1
まとめと今後の展開