
自動制御
22
自動制御の実際 高知工科大学 システム工学郡 電子工学専攻 やまもと たつや 山本 達也
-
Upload
tatsuya-yamamoto -
Category
Technology
-
view
65 -
download
5
Transcript of 自動制御

自動制御の実際
高知工科大学 システム工学郡 電子工学専攻やまもと たつや
山本 達也
フィードバック制御の構造~PIDと制御ループ~

制御方法の種類
開ループ制御(フィードフォワード制御)
閉ループ制御(フィードバック制御)
PID制御
複合制御系
カスケード制御
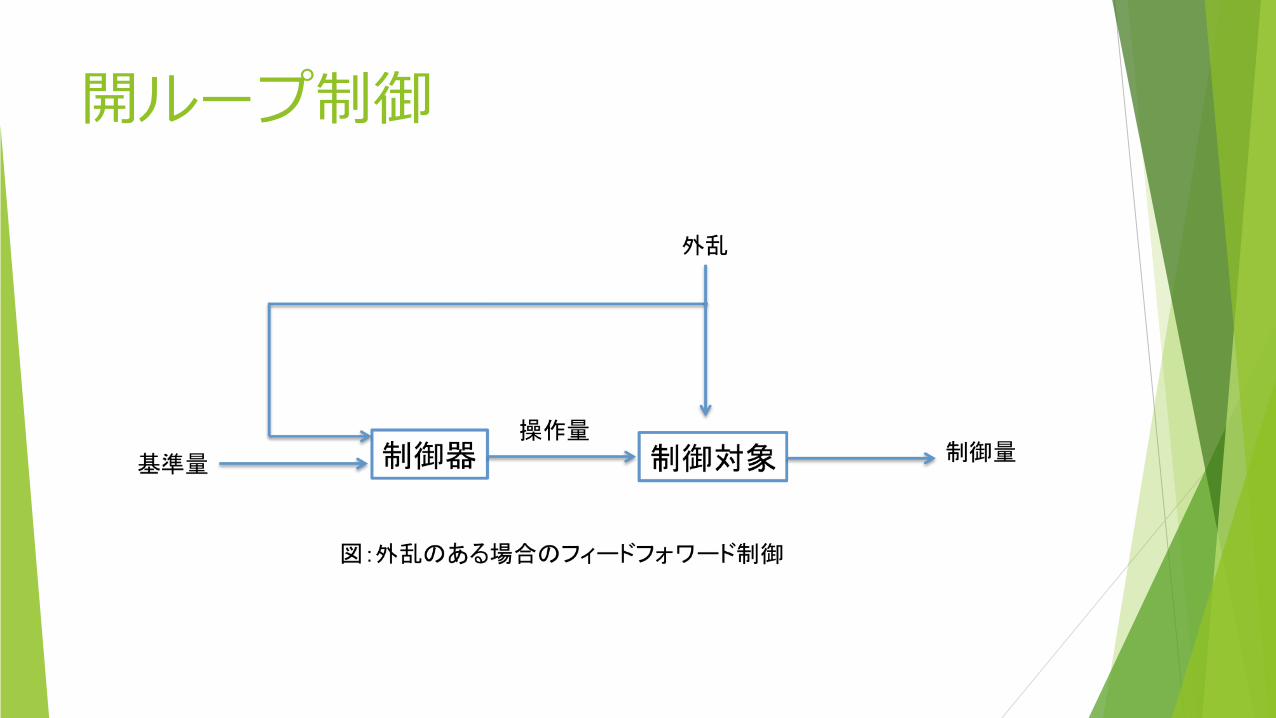
開ループ制御

開ループ制御
利点
制御プログラムを書くのが簡単
欠点
外乱による誤差が大きく作用する。

閉ループ制御

PID制御

PID制御
利点
外乱のない環境では応答性や精度などが良い。
古くから使われており資料が豊富
欠点
外乱に対応させるには別の制御と組み合わせる必要がある。
定数の設定がわかりにくい。(チューニングアルゴリズムもある)
適応できないシステムも存在する。

複合制御系(制御の組み合わせ)

カスケード制御(複合制御系の多重ループの形)
カスケード制御
利点
精度が良い。
ループ数が多いと外乱に強くなる。
位置制御に適応される。
欠点
応答性が若干低い。
複数のセンサを利用する必要がある。
外乱に強いが適応できない外乱もある。
プログラムが煩雑になりやすい。(長くなる)

カスケード制御例1:位置制御

カスケード制御例2:外乱検知付き位置制御

制御プログラムの実際

重要ポイント
入力データの処理
リミット処理
プログラム、データの構造化
データの単位
制御のテストと精度の検証

入力データの処理
入力データ(ロータリーエンコーダやポテンショメータなどの値)に対してフィルタ処理をする。
高周波がある→デジタルローパスフィルター
初期値を0にする。
単位を人間がわかりやすい単位に(mmや度)

プログラム、データの構造化
データを構造化する。(構造体などを活用)
→可読性向上
プログラムを構造化する。(関数などを活用)
→しないと複雑な制御系を表現しにくい。
チームでコードを書くので何にしてもわかりやすいコードを心がける!

リミット処理
制御系が振り切らないようにデータのリミットを設定する必要がある。
例:速度制御において早くなり過ぎないようにリミットを設定。
例:レール位置制御においてレールをはみ出さないようにリミットを設定。

データの単位
単位の統一性がないと数値計算を用いた制御(オムニや位置)などがやりにくい。
複数のマイコンで制御する場合マイコン同士のデータの単位を互換性ある形(または統一)にする必要がある。
デバッグする上でデータの意味が人間にわかりづらい。
プログラムの分担のために必要

データの単位
マスター スレーブ
100mm/sで3秒動け! count/sで3秒動け?
マスターで扱い易いのはmm/s
スレーブで扱い易いのはcount/ms
両方mm単位にしようぜ!

データの単位
モータのcount→mm変換方法
ロータリー
エンコーダ
の値
ギアヘッド
のギア比
ギアボック
スのギア比
ホイール
円周

制御のテストと精度の検証
制御がうまく行っているか確認する必要がある。
速度→目標速度で安定するかをグラフ化して確認、収束時間や定常偏差を見る
位置→実際の位置を計測して目標位置に到達しているか確認、誤差を測定して精度算出


















