5. Korelacyjna analiza sygnałów
8
KORELACYJNA ANALIZA SYGNAŁÓW Instrukcja do wykonania pracy laboratoryjnej № 5 Z przedmiotu ”Inżynieria przetwarzania sygnałów” A. Melnyk, Y. Wawruk, O. Laszko Opracowanie wersji polskiej: Marcin Jagieła CEL PRACY Sposoby wyznaczania oraz badanie właściwości charakterystyk autokorelacyjnych oraz wzajemnie-korelacyjnych sygnałów nieokresowych jako efektywny sposób analizy sygnałów i systemów. WIADOMOŚCI TEORETYCZNE Korelacyjna analiza sygnałów jest jedną z najważniejszych operacji w dziedzinie cyfrowego przetwarzania sygnałów. Wykorzystuje się ją w takich zastosowaniach przetwarzania sygnałów jak wykrywanie ukrytych okresowości, wyznaczanie odległości od obiektu (np. radiolokacja oraz echolokacja), określenie prędkości obiektu ruchomego, eliminacja szumów i inne. Współczynnik korelacji r= ∑ n=0 N−1 x ( n) y ( n) jest miarą podobieństwa między sygnałami x ( n) і y ( n). 1. Dla y ( n) =x ( n) + ε ( n ), mamy r= ∑ n=0 N−1 ( ( x ( n) ) 2 +ε ( n ) x ( n) ¿ ) ¿Przy tym przyjmuje się, że gdy r jest duże, to między x ( n) і y ( n) jest korelacja. 2. Dla y ( n) =−x ( n) + ε ( n ) mamy r= ∑ n=0 N−1 (−( x ( n) ) 2 +ε ( n) x ( n) ¿ ) ¿ Przy tym przyjmuje się, że gdy r ma duży moduł, lecz jest ujemne, to między x ( n) і y ( n) jest korelacja, która się rozwija w odwrotnym kierunku.
Transcript of 5. Korelacyjna analiza sygnałów

KORELACYJNA ANALIZA SYGNAŁÓW
Instrukcja do wykonania pracy laboratoryjnej № 5
Z przedmiotu ”Inżynieria przetwarzania sygnałów”
A. Melnyk, Y. Wawruk, O. LaszkoOpracowanie wersji polskiej: Marcin Jagieła
CEL PRACY
Sposoby wyznaczania oraz badanie właściwości charakterystyk autokorelacyjnych oraz wzajemnie-korelacyjnych sygnałów nieokresowych jako efektywny sposób analizy sygnałów i systemów.
WIADOMOŚCI TEORETYCZNE
Korelacyjna analiza sygnałów jest jedną z najważniejszych operacji w dziedzinie cyfrowego przetwarzania sygnałów. Wykorzystuje się ją w takich zastosowaniach przetwarzania sygnałów jak wykrywanie ukrytych okresowości, wyznaczanie odległości od obiektu (np. radiolokacja oraz echolokacja), określenie prędkości obiektu ruchomego, eliminacja szumów i inne.
Współczynnik korelacji
r=∑n=0
N −1
x (n ) y (n )
jest miarą podobieństwa między sygnałami x (n ) і y (n).
1. Dla y (n )=x (n )+ε ( n ), mamy
r=∑n=0
N −1
(( x (n ) )2+ε (n ) x (n )¿)¿Przy tym przyjmuje się, że gdy r jest duże, to między x (n ) і y (n) jest
korelacja.2. Dla y (n )=− x (n )+ε (n ) mamy
r=∑n=0
N −1
(−( x (n ) )2+ε (n ) x (n )¿)¿
Przy tym przyjmuje się, że gdy r ma duży moduł, lecz jest ujemne, to między x (n ) і y (n) jest korelacja, która się rozwija w odwrotnym kierunku.
3. Kiedy x (n ) і y (n), lub jeden z nich jest realizacją procesu losowego z rozkładem równomiernym o wartościach z przedziału [−1,1 ] : x (n )∈ [−1,1 ] , y (n )∈[−1,1] (ponieważ rozkład jest równomierny to prawdopodobieństwo tego że x (n ) oraz y (n ) otrzyma pewną wartość a∈[−1,1] jest jednakowe), to mamy
r=∑n=0
N −1
x (n ) y (n )
Przy tym przyjmuje się, że gdy r jest bliskie zeru, to procesy są niekorelowane. W przypadku, kiedy r>0, te dwa procesy korelują się i między nimi jest pewna zależność.

Funkcją autokorelacji (AKF) nazywają iloczyn skalarny sygnału i jego kopii przesuniętej w czasie. Dla sygnałów nieokresowych AKF oblicza się za pomocą wzorów (1) oraz (2) odpowiednio dla sygnałów analogowych oraz sygnałów cyfrowych.
bxx (τ )=∫−∞
∞
x ( t ) x ( t +τ ) dt (1)
bxx (n )= ∑k=−∞
k=∞
x (k ) x(k+n)(2)
gdzie x – badany sygnał.Funkcją korelacji wzajemnej (FKW) nazywamy iloczyn skalarny dwóch sygnałów,
przesuniętych w czasie . Dla sygnałów nieokresowych FKW oblicza się za pomocą wzorów (3) oraz (4) odpowiednio dla sygnałów analogowych oraz sygnałów cyfrowych.
bxy (τ )=∫−∞
∞
x ( t ) y ( t+τ ) dt (3)
bxy (n )= ∑k=−∞
k=∞
x (k ) y (k+n)(4)
gdzie x , y – badane sygnały.NKF wykorzystuje się do określania podobieństwa sygnałów oraz ich pozycji na osi czasu.
Funkcja korelacji wzajemnej dla okresowych sygnałów nieograniczonych w czasie przedstawia się wzorem:
bxy (τ )= limT → ∞
12 T
∫−T
T
x ( t ) y (t+τ ) dt (5)
PYTANIA KONTROLNE
1. Definicja funkcji autokorelacji.2. Definicja funkcji korelacji wzajemnej.3. Zastosowanie funkcji autokorelacji.4. Zastosowanie funkcji korelacji wzajemnej.5. Co określa współczynnik korelacji?
PRZEBIEG LABORATORIUM
1. Za pomocą systemu MATLAB wygenerować wejściowe ciągi dyskretne xa (n ∆ t ) , ya (n∆ t ), ∆ t=T / N , N=2m, m=10 oraz narysować ich wykresy na wspólnej osi czasowej.
2. Wyznaczyć funkcję korelacji (autokorelacji, lub korelacji wzajemnej w zależności od zadania) dla zadanych sygnałów za pomocą wzorów (2) lub (4) odpowiednio.
3. Przeanalizować otrzymane wyniki oraz sporządzić wnioski dotyczące charakterystyk korelacyjnych zadanych sygnałów.
TREŚĆ SPRAWOZDANIA DO PRACY LABORATORYJNEJ 2
1. Zadanie.2. Tekst programu w MATLAB.3. Wykresy sygnałów wejściowych na wspólnej osi czasu.4. Wykres odpowiedniej funkcji korelacji zadanych sygnałów na osi czasu.5. Wnioski.
LITERATURA
2

1. Borodziewicz W., Jaszczak K. - Cyfrowe przetwarzanie sygnałów, WNT, Warszawa 1987 2. Box G., Jenkins G. - Analiza szeregów czasowych, PWN, 1983 3. Dąbrowski A., Dymarski A. (praca zbiorowa) - Podstawy transmisji cyfrowej, Oficyna Wydawnicza
Politechniki Warszawskiej, Warszawa 2004 4. Dudziak K., Sieńko W. - Cyfrowe przetwarzanie sygnałów, WSM, Gdynia 1999 5. Izydorczyk J., Płonka G., Tyma G. - Teoria sygnałów, Helion, 1999 6. Jakubiak A., Radomski D. - Sygnały i systemy, materiały pomocnicze do ćwiczeń, Oficyna Wydawnicza
Politechniki Warszawskiej, Warszawa 2004 7. Lynn P. A., Fuerst W. - Digital signal processing with computer applications, revised edition, John Wiley
& Sons, New York, 1994 8. Lyons R. G. - Wprowadzenie do cyfrowego przetwarzania sygnałów, WKiŁ, Warszawa 1999 9. Oppenheim A.V. - Sygnały cyfrowe, przetwarzanie i zastosowania, WNT, Warszawa 1982 10. Oppenheim A.V., Schafer W. - Cyfrowe przetwarzanie sygnałów, WKiŁ, Warszawa 1979 11. Proakis J. G. , D. G. Monolakis - Digital Signal Processing, Prentice Hall, New Jersey1996, third edition 12. Sobczak W. - Podstawy probabilistyczne teorii systemów informacyjnych, WNT, 1981 13. Stranneby D. - Cyfrowe przetwarzanie sygnałów, Warszawa 2004, BTC 14. Szabatin J. - Podstawy teorii sygnałów, WKiŁ, Warszawa 2000 15. Therrien Ch. W. - Discrete Random Signals and Statistical Signal, Processing, Prentice Hall International,
Inc. 1992 16. Wojnar A. - Teoria sygnałów, WNT, Warszawa 1980 17. Wojnar A. - Teoria sygnałów, WNT, Warszawa 1988, wydanie drugie poprawione i rozszerzone 18. Zieliński T. P. - Od teorii do cyfrowego przetwarzania sygnałów, Wydział EAIiE AGH, Kraków, 2002,
programy omówione w książce są dostępne na stronie http://galaxy.uci.agh.edu.pl/~zmetr 19. Zieliński T. P. - Od teorii do cyfrowego przetwarzania sygnałów, WKiŁ, Warszawa 2006
3

ZADANIE
Typ funkcji : 1-Funkcja autokorelacji, 2-Funkcja korelacji wzajemnej
№Form
a x � ( t ) y �( t ) №Form
a x � ( t ) y �( t )
1 1 8 2
2 2 9 2
3 2 10 1
4 2 11 1
5 1 12 1
6 2 13 1
7 2 14 1
4

15 2 23 1
16 1 24 2
17 2 25 1
18 1 26 2
v
19 2 27 1
20 2 28 2
21 2 29 1
22 1 30 1
5

PRZYKŁAD WYKONANIA1. Zadanie Funkcje opisujące sygnały zgodnie z zadaniem:
Forma x � ( t ) y �( t )
2
2. Tekst programu:
clear all %wyczyszczanie pamięciclose all %zamknięcie wszystkich okien graficznychm=10;N=2^m; %ilość punktówT=12; %przedział badaniadt=T/N; %krok próbkowaniat11=0:dt:3-dt; %pierwsza część wektora czasu dla pierwszej funkcji x11=0*t11; %obliczenie pierwszej części wartości pierwszej funkcjit12=3:dt:8-dt; % druga część wektora czasu dla pierwszej funkcjix12=t12-3; %obliczenie drugiej części wartości pierwszej funkcjit13=8:dt:12; % trzecia część wektora czasu dla pierwszej funkcjix13=0*t13; %obliczenie trzeciej części wartości pierwszej funkcjit=[t11 t12 t13]; %pełny wektor czasu dla pierwszej funkcjix1=[x11 x12 x13]; %obliczenie pierwszej funkcji t21=0:dt:6-dt; %pierwsza część wektora czasu dla drugiej funkcji x21=3+0*t21; %obliczenie pierwszej części wartości drugiej funkcjit22=6:dt:8-dt; % druga część wektora czasu dla drugiej funkcjix22=0*t22; %obliczenie drugiej części wartości drugiej funkcjit23=8:dt:12; % trzecia część wektora czasu dla drugiej funkcjix23=9+0*t23; %obliczenie trzeciej części wartości drugiej funkcjix2=[x21 x22 x23]; %obliczenie drugiej funkcjiplot (t ,x1,'b',t,x2,'r') %wykres funkcji we wspólnym układzie współrzędnychaxis([0 13 0 10]) %ustawienie osit_core=dt:dt:24-dt; %pełny wektor czasu dla funkcji korelacji wzajemnejy=(1/N)*xcorr(x1,x2); %obliczenie funkcji korelacji wzajemnejfigure(2)plot(t_core,y) %wykres funkcji korelacji wzajemnejaxis([0 25 0 10])
6

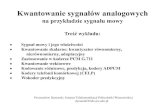
3. Wykresy sygnałów wejściowych na wspólnej osi czasu .
0 2 4 6 8 10 120
1
2
3
4
5
6
7
8
9
10
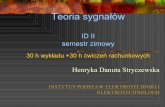
4. Wykres odpowiedniej funkcji korelacji zadanych sygnałów na osi czasu
0 5 10 15 20 250
1
2
3
4
5
6
7
8
9
10
7






![Podstawy teorii sygnałów - Jerzy Szabatin [2003]](https://static.fdocument.pub/doc/165x107/55721430497959fc0b93f9d7/podstawy-teorii-sygnalow-jerzy-szabatin-2003.jpg)