5. Bölüm - Erpe-Metegerpemeteg.org/erpemeteg/Kurs_Materyalleri/Kitap/... · 5. Bölüm: Robot...
32
5. Bölüm Robot Programlamaya Giriş
Transcript of 5. Bölüm - Erpe-Metegerpemeteg.org/erpemeteg/Kurs_Materyalleri/Kitap/... · 5. Bölüm: Robot...

5. Bölüm
Robot Programlamaya Giriş


5. Bölüm: Robot Programlamaya Giriş
129
5.1. Robot Programlama
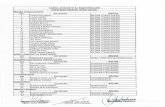
KUKA robotların programlama işlemleri, Şekil 5.1’de görüldüğü gibi hem çevrimiçi (On-Line) hem de çevrimdışı
(Off-Line) olmak üzere iki şekilde de yapılabilmektedir. Doğrudan smartPAD kullanılarak programların sistem
bağlantılı bir şekilde yazılması çevrimiçi programlama olarak ifade edilmektedir. Endüstriyel Robot sistemine
bağlantı olmaksızın programların geliştirilmesi imkanını sağlayan KUKA Sim, OfficeLite vb. İnteraktif Grafik
Tabanlı ve WorkVisual, OrangeEdit vb. Text Tabanlı yazılımlar üzerinden yapılan programlama işlemi ise
çevrimdışı programlama olarak ifade edilmektedir.
Çevrimiçi Programlama
smartPAD ile çevrimiçi programlama
(Öğretme Tabanlı Programlama)
Çevrimdışı Programlama
KUKA Sim ile Simülasyon Programlama
(İnteraktif Grafik Tabanlı Programlama)
KUKA OfficeLite ile Robot Programlama
(Text Tabanlı Programlama)
Şekil 5.1. KUKA Robot Programlama Yöntemleri

ERPE-METEG
130
5.2. Program Modülleri
5.2.1. Program Modül Yapısı
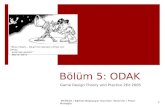
Endüstriyel Robot program modülleri Şekil 5.2’de görüldüğü gibi iki bölümden oluşmaktadır:
SRC ( Source Code) Dosyası - Program Kaynak Kodu
DAT ( Data ) Dosyası - Veri Listesi (Kalıcı Veriler ve Nokta Koordinatları)
Program Modülü
SRC (Kaynak Kodu) dosyası içeriği
DAT (Veri Listesi) dosyası içeriği
Şekil 5.2. Program Modül Yapısı
DEFDAT Ana_Prg()
DECL E6POS XP1={X 500, Y 0, Z 300, A 0, B 0, C 0,
S 6, T 27, E1 0, E2 0, E3 0, E4 0, E5 0, E6 0}
DECL FDAT FP1 …
…
ENDDAT
DEF Ana_Prg()
INI
PTP HOME Vel= 50% DEFAULT
PTP P1 Vel=50% PDAT1 TOOL[1] BASE[1]
PTP P2 Vel=50% PDAT2 TOOL[1] BASE[2]
…
END

5. Bölüm: Robot Programlamaya Giriş
131
Program Modülleri daima "Program" klasöründe kaydedilmelidir. Yeni klasörler oluşturup program modüllerini
orada kaydetmek de mümkündür. Program Modülleri, “M” simgesiyle ( ) görüntülenmektedir. İstenildiği
takdirde bir modüle yorum (örneğin programa ilişkin kısa bir fonksiyon açıklaması) eklenebilmektedir. Şekil 5.3’te
smartPAD Navigatör’de Program Modülleri görülmektedir.
1 Klasör
Burada Program Klasör adıdır. Programların R1 klasörü altında bulunması gerekmektedir.
2 Alt Klasör
Burada ERPEMETEG Alt Klasör adıdır.
3 Program Modülü
Burada ORNEK program modülü adıdır.
Şekil 5.3. Program Modülleri
Program Modüllerinin oluşturulması, silinmesi, yeniden adlandırılması ve çoğaltılması gibi işlemler smartPAD
Navigatör kullanılarak kolaylıkla yapılabilmektedir.

ERPE-METEG
132
5.2.2. Endüstriyel Robot Programı Genel Yapısı
KUKA Endüstriyel Robot programlarının genel yapısı Şekil 5.4’te görüldüğü gibi 4 temel bölümden oluşmaktadır.
Programlama işlemi doğrudan elle metin olarak komutların yazılması veya Inline-Form kullanılarak
yapılabilmektedir.
1
Bu program satırları sadece Uzman (Expert) Kullanıcı grubunda görüntülenmektedir.
"DEF” ile Program Adı belirlenir. Bu tanım daima programın başında yer alır.
"END" talimatı program sonunu ifade eder.
2
"INI" satırı, programının doğru çalışması için gerekli olan standart parametre
çağrılarını içermektedir.
"INI" satırı daima ilk olarak çalıştırılmak zorundadır.
3
Hareket, Bekleme, Mantıksal vb. komutların yer aldığı asıl program metnidir.
"PTP Home" hareket komutu, kesin ve bilinen bir pozisyonu belirtmesi nedeniyle
genellikle bir programın başında ve sonunda kullanılmaktadır.
Şekil 5.4. Endüstriyel robot programının genel yapısal görünümü

5. Bölüm: Robot Programlamaya Giriş
133
No Yeni Program Modülü Oluşturma
5-1 Yeni Program Modülü oluşturmak için aşağıdaki adımlar takip
edilmelidir.
Adım 1. Yeni Modülün oluşturulacağı klasör, smartHMI ekranında “Root R1” klasörü altında işaretlenir.
Adım 2. New butonuna basılır.
Adım 4. Program Modülü için bir ad ve gerekirse bir açıklama girilir. İşlem OK veya Enter ile onaylanır.

ERPE-METEG
134
Adım 5. Program modülü SRC (Kaynak Kod) dosyası oluşturulur.
Adım 6. Program Open ile açılır.
Adım 7. Program Modülü içeriği görüntülenir.

5. Bölüm: Robot Programlamaya Giriş
135
No Program Modülü Silme
5-2 Program Modülü silme için aşağıdaki adımlar takip edilmelidir.
DİKKAT
"Expert/Uzman" kullanıcı grubunda ve "Ayrıntılar" filtre ayarında her modül için
navigatörde iki dosya vardır (SRC ve DAT dosyası). Bu durum söz konusu
olduğunda her iki dosyanın da silinmesi gerekir! Silinen dosyalar yeniden geri
yüklenemez.
Adım 1. smartHMI ekranında ilgili Klasör ve dosya listesinde çoğaltılacak Program Modül Dosyası seçilir.
Adım 2. Delete butonuna basılır.
Adım 3. Silme işlemi Yes ile onaylanır.

ERPE-METEG
136
No Program Modülü Adını Değiştirme
5-3 Program Modül adının değiştirilmesi için aşağıdaki adımlar takip
edilmelidir.
DİKKAT
"Expert/Uzman" kullanıcı grubunda ve "Ayrıntılar" filtre ayarında her modül için
Navigatörde iki dosya vardır (SRC ve DAT dosyası). Bu durum söz konusu
olduğunda her iki dosyanın da değiştirilmesi gerekir.
Adım 1. smartHMI ekranında ilgili Klasör ve dosya listesinde çoğaltılacak Program Modül Dosyası seçilir.
Adım 2. Edit Rename seçilir.
Adım 3. Program Modülü dosyasının adının yerine Yeni Dosya Adı yazılır ve OK ile onaylanır.

5. Bölüm: Robot Programlamaya Giriş
137
No Program Modülü Çoğaltma
5-4 Program Modülünün çoğaltılması için aşağıdaki adımlar takip
edilmelidir.
DİKKAT
"Expert/Uzman" kullanıcı grubunda ve "Ayrıntılar" filtre ayarında her modül için
Navigatörde iki dosya vardır (SRC ve DAT dosyası). Bu durum söz konusu
olduğunda her iki dosyanın da çoğaltılması gerekir.
Adım 1. smartHMI ekranında ilgili Klasör ve dosya listesinde çoğaltılacak Program Modül Dosyası seçilir.
Adım 2. Duplicate butonuna basılır.
Adım 3. Program Modülü dosyasının adının yerine Yeni Dosya Adı yazılır ve OK ile onaylanır.

ERPE-METEG
138
5.3. Robot Programları Çalıştırma ve Geliştirme
5.3.1. Robot Programlarının Geliştirilmesi
Yeni bir programın yazılması veya daha önceden yazılmış bir program üzerinde değişiklikler yapılabilmesi amacıyla
ilgili Robot programının öncelikle açılması gerekmektedir. Bu amaçla Navigatörde istenen program işaretlenerek,
“Open” butonuna basılır. Normalde program “Open” ile açıldığında program kodları görüntülenir, ancak o
programın çalıştırılması mümkün değildir. Bir programın çalıştırılabilmesi için öncelikle o programın “Select” ile
seçilmesi gerekmektedir.
5.3.2. Robot Programlarının Çalıştırılması
Endüstriyel Robot programlarının oluşturulması, düzenlenmesi, seçilmesi, başlatılması vb. işlemler smartPAD
Navigatör ekranında yapılmaktadır. Endüstriyel Robot programları her zaman için “Root R1” klasörü altında
tutulmaktadır.
Çalıştırılması istenen bir Robot programının öncelikle seçilmesi gerekmektedir. Bu amaçla Navigatörde istenen
program işaretlenerek, “Select” butonuna basılır. Normalde program seçildiğinde program kodları görüntülenir.
Ancak her görüntülenen program Seçili anlamına gelmemektedir. “Open” butonuna basılarak da bir program
görüntülenir ve üzerinde kodlama işlemleri yapılabilir, ancak o programın çalıştırılması mümkün değildir. Örneğin
A programı seçili iken, B programı görüntüleniyor olabilir. Bu durumda çalışan program A programı olabilir, B
programı çalıştırılamaz.
Herhangi bir Robot Programının Manuel olarak çalıştırılabilmesi için, İleri - Geri butonları ile birlikte eşzamanlı
olarak Onay Anahtarı’nın da Orta Konumda basılı tutulması gerekmektedir (Şekil 5.5).
Buton Açıklama
İleri Doğru Program Çalıştırma
Geri Doğru Program Çalıştırma
Şekil 5.5. Program Çalışma Yönleri: İleri / Geri

5. Bölüm: Robot Programlamaya Giriş
139
Robot Program Yorumlayıcı (Robot Interpreter) Durumu Tablo 5.1’de görüldüğü gibi farklı renkler ile
anlatılmaktadır.
Tablo 5.1. Robot Program Yorumlayıcı (Robot Interpreter) Durumu
Gri
Sarı
Yeşil
Kırmızı
Siyah
Program
Seçili Değil
Komut İmleci
Seçili Program
Başında
Seçili Program
Çalışıyor
Başlatılan Program
Durduruldu.
Komut İmleci
Seçili Programın
Sonunda
5.3.3. Robot Programı Çalışma Modları
Bir robot programı çalıştırmak, çalışmayı inceleyebilmek ve gerekli düzenlemeleri yapabilmek amacıyla 3 farklı
şekilde program çalışması söz konusudur. Endüstriyel Robota yönelik Program Çalışma Modları Tablo 5.2’de
görülmektedir.
Tablo 5.2. Endüstriyel Robot Programı Çalışma Modları
Program Çalışma Modu Açıklama
GO
(Program)
Program durmadan program sonuna kadar çalışır.
Test işletiminde start tuşunun basılı tutulması gerekir.
Motion-Step
(Hareket)
Motion-Step kullanımında, her hareket komutu tek tek yürütülür.
Bir hareketin tamamlanmasından sonra, yeniden "Start" tuşuna basılması
gerekir.
Single-Step
(Tek Adım)
Sadece "Expert/Uzman" kullanıcı grubunda kullanılabilir.
Incremental-Step uygulamasında sadece geçerli program satırı yürütülür
Her satırdan sonra yeniden Start tuşuna basılması gerekir.

ERPE-METEG
140
5.3.4. Program Blok Göstergesi (Block Pointer)
KUKA Endüstriyel Robot programlarının çalışması esnasında Program Blok Göstergesi program çalışmasının hangi
aşamada olduğunu göstermek için değişik şekiller almaktadır. Tablo 5.3’te Program Blok Göstergesi durumları ve
açıklamaları görülmektedir. Şekil 5.6’da ise Program Blok Göstergesi için çeşitli çalışma durumlarındaki örnek
gösterimler yer almaktadır.
Tablo 5.3. Program Blok Göstergesi durumları
Gösterge Yön Açıklama
(Mavi)
İleri
(Forwards) İLERİ yönde Son Noktaya YAKLAŞIYOR.
(Kırmızı)
Geri
(Backwards) GERİ yönde Son Noktaya YAKLAŞIYOR.
(Mavi)
İleri
(Forwards) İLERİ yönde Son Noktaya ULAŞILDI.
(Kırmızı)
Geri
(Backwards) GERİ yönde Son Noktaya ULAŞILDI.
(Mavi)
İleri
(Forwards) İLERİ yönde Yardımcı Noktaya YAKLAŞIYOR.
(Kırmızı)
Geri
(Backwards) GERİ yönde Yardımcı Noktaya YAKLAŞIYOR.
(Mavi)
İleri
(Forwards) İLERİ yönde Yardımcı Noktaya ULAŞILDI.
(Kırmızı)
Geri
(Backwards) GERİ yönde Yardımcı Noktaya ULAŞILDI.
İleri
(Forwards) İLERİ yönde Program Blok Sonuna ulaşıldı.
Geri
(Backwards) GERİ yönde Program Blok Başına ulaşıldı.

5. Bölüm: Robot Programlamaya Giriş
141
Endüstriyel Robot P3 noktasından P4 noktasına hareket ediyor.
Endüstriyel Robot P4 noktasına ulaştı.
Endüstriyel Robot P5 noktasından P6 Yardımcı Noktaya hareket ediyor.
Endüstriyel Robot P6 Yardımcı Noktaya ulaştı.
Endüstriyel Robot P7 noktasından P6 Yardımcı Noktaya hareket ediyor.
Gösterge, Endüstriyel Robot programında en alt konumda
Şekil 5.6. Program Blok Göstergesi için çeşitli durumlar

ERPE-METEG
142
5.3.5. Robot Başlangıç Sürüşü (SAKAlmanca – BCOİngilizce)
Bir KUKA robotunun başlangıç sürüşüne SAK Sürüşü (BCO – Block COincidence: Blok Örtüşmesi) adı
verilmektedir. Bir SAK sürüşü, güncel robot pozisyonunun ilgili robot programındaki pozisyon ile aynı olmasını
sağlamak için zorunludur. Bu durum robot ve çevre elemanların çarpma güvenliği açısından son derece önemlidir.
SAK Sürüşü, geçerli konumdan hedef konuma PTP veya LIN hareketi ile icra edilir. SAK sürüşü esnasında hız
otomatik olarak azaltılmaktadır. SAK Sürüşü esansında robot hareketi güvenilir değildir, çarpma meydana gelebilir.
Bu nedenle SAK dürüşü süresince, herhangi bir çarpmaya karşı robot hareketi dikkatli bir şekilde takip edilmelidir.
SAK sürücü T1 ve T2 çalışma modlarında geçerlidir, dolayısıyla AUT ve AUT EXT modlarında SAK sürüşü
geçerli değildir.
SAK Sürüşü yapılmasını gerektiren durumlar şunlardır:
Programı Seçme (Select) veya Başa Alma (Reset) sonrası Home konumuna SAK sürüşü
Bir hareket komutu değiştirildikten sonra SAK sürüşü: Nokta silme, tanıtma vb.
Bir Komut Satırı seçiminden sonra SAK sürüşü
Programın işletimi sırasında elle hareket (Jogging) yönteminden sonra SAK sürüşü
Şekil 5.7’de program Select veya Reset işleminden sonra Home pozisyonuna Robot SAK sürüşü görülmektedir.
Şekil 5.7. Home pozisyonuna SAK sürüşü (Program Select veya Reset işleminden sonra)

5. Bölüm: Robot Programlamaya Giriş
143
No Endüstriyel Robot Programını Açma
5-5
Endüstriyel Robot programlarının yazılması ve üzerinde değişikliklerin
yapılabilmesi amacıyla ilgili programın Open ile açılması gerekmektedir.
Endüstriyel Robot programının açılması için aşağıdaki adımlar takip
edilmelidir.
DİKKAT
Open ile açılan bir programın çalıştırılması mümkün değildir.
Bu nedenle çalıştırılması istenen bir programın Select ile seçilmesi gereklidir.
Adım 1. Öncelikle açılması istenen program smartHMI ekranında “Root R1 Program” dizini altından
işaretlenerek “Open” butonu ile açılır.

ERPE-METEG
144
Adım 3. Program içeriği görüntülenmektedir.
Bu aşamada robot programı üzerinde istenen değişiklikler yapılabilmektedir.

5. Bölüm: Robot Programlamaya Giriş
145
No Endüstriyel Robot Programını Çalıştırma
5-6 Endüstriyel Robot programının çalıştırılması için aşağıdaki adımlar takip
edilmelidir.
DİKKAT
Seçilen hareket komutları seti PTP sürüş komutunu içerdiğinde, SAK sürüşü
gerçek pozisyondan hedef pozisyonuna PTP hareketi olarak yürütülür.
Seçilen hareket komutları seti LIN ya da CIRC komutlarını içerdiğinde SAK
sürüşü LIN hareketi olarak yürütülür.
Çarpışmaları önlemek için hareketi gözlemlemek gerekir.
SAK sürüşünde hız otomatik olarak düşürülmüştür.
Adım 1. Öncelikle çalıştırılması istenen program smartHMI ekranında “Root R1 Program” dizini
altından işaretlenerek “Select” butonu ile açılır.

ERPE-METEG
146
Adım 2. Program içeriği görüntülenmektedir.
Adım 3. Programın çalışma hızı ayarlanır.
Manuel Çalışma (T1 ve T2) için Hand Override – HOV ile çalışma hızı % olarak ayarlanır.
Otomatik Çalışma için Program Override – POV ile çalışma hızı % olarak ayarlanır.

5. Bölüm: Robot Programlamaya Giriş
147
Adım 4. Manuel Çalışma (T1) modunda, program çalışması sürecince Onay Anahtarı orta konumda tutulur.
Adım 5. Onay Anahtarı orta konumda basılı iken İleri Başlat butonuna basılı tutulur. Bu esnada;
Öncelikle "INI" satırı çalıştırılır.
Robot, SAK sürüşünü yapar.
Adım 6. SAK sürüşü biter bitmez;
Hareket durdurulur:
"CÜU ulaşıldı." veya “Programmed path reached (BCO)” bilgi mesajı görüntülenir.
Program Durumu Kırmızı olarak gösterilir.

ERPE-METEG
148
No Robot Programını Başa Alma
5-7 Seçili bir Programda Komut İmlecini Program Başına almak için
aşağıdaki adımlar takip edilmelidir.
Adım 1. smartHMI’de Robot Interpreter üzerine dokunmak suretiyle Menü Penceresi elde edilir.
Burada Reset Program seçeneği ile program imleci başa alınır.
Adım 2. Alternatif olarak “Edit Reset Program” menü hareketi ile program başa alınır.
Adım 3. Böylelikle program yeniden baştan itibaren çalıştırılabilir duruma getirilmiş olur.

5. Bölüm: Robot Programlamaya Giriş
149
No Robot Programından Çıkış
5-8 Robot Programından çıkmak için birkaç yöntem kullanılabilmektedir.
Aşağıda bu amaçla 2 seçenek kullanılmaktadır.
Adım 1. smartHMI’de Robot Interpreter üzerine dokunmak suretiyle Menü Penceresi elde edilir.
Burada Cancel Program seçeneği ile programdan çıkış sağlanır.
Adım 2. Alternatif olarak “Edit Cancel Program” ile menü hareketi ile program terk edilir.

ERPE-METEG
150
5.4. Arşivleme ve Geri Yükleme
Endüstriyel Robot Sistemindeki verilerin başta güvenlik olmak üzere çeşitli nedenlerle yedeklenmesi amacıyla
Arşivleme ve Geri Yükleme işlemleri yapılabilmektedir. Arşivleme işlemi sonrasında ilgili Robot adıyla aynı ZIP
uzantılı bir arşiv dosyası oluşturulmaktadır. Ayrıca bu ZIP dosyasına paralel olarak D:\ sürücüsünde (INTERN.ZIP)
adında başka bir arşiv dosyası da oluşturulmaktadır. İstenildiği takdirde smartHMI ana menüsünde yer alan ilgili
Start-up Robot Data seçeneği altında arşiv için verilecek dosya adı belirlenebilmektedir.
Arşivleme işlemi esnasında sistem tarafından mümkün olabilen Kayıt Yeri Seçenekleri Tablo 5.4’te görülmektedir.
Ayrıca arşivleme amacıyla kullanılacak verilerin belirlenmesine yönelik Veri Seçenekleri Tablo 5.5 ’te
görülmektedir.
Tablo 5.4. Arşivleme Kayıt Yeri Seçenekleri
Kayıt Yeri Seçeneği Açıklama
USB (KCP) KCP (smartPAD) üzerindeki USB Bellek Girişi
USB (Kabin) Robot Kontrolör Kabini üzerindeki USB Bellek Girişi
Ağ Ağ Yolu üzerindeki bir adres
(İlgili Ağ yolu, Robot Data bölümünde ayarlanmalıdır. )
Tablo 5.5. Arşivleme Veri Seçenekleri
Veri Seçeneği Açıklama
Tümü Mevcut bir sistemin Geri Yüklemesi için gerekli veriler arşivlenmektedir.
Uygulamalar Kullanıcı tanımlı KRL Modülleri ve ilgili sistem dosyaları arşivlenmektedir.
Sistem Verileri Sadece Makine verileri arşivlenmektedir.
Log Verileri Sadece Log dosyaları arşivlenmektedir.
KrcDiag
Hata Analizi için KUKA Robot Firmasına gönderilecek veriler arşivlenmektedir.
Hedefte arşiv ZIP dosyasını içeren KRCDiag adında bir dizi oluşturulur.
Ayrıca bu ZIP dosya C:\KUKA\KRCDiag dizininde otomatik olarak
arşivlenmektedir.

5. Bölüm: Robot Programlamaya Giriş
151
No Arşiv Alma
5-9 Arşiv Alma için aşağıdaki adımlar takip edilmelidir.
Adım 1. Arşivleme amacıyla kullanılacak olan USB Bellek, KCP (smartPAD) veya Kontrolör Kabini
üzerindeki USB Bellek girişine takılır.
Adım 2. smartHMI ana menüsünden USB Belleğin takıldığı girişe bağlı olarak;
File Archive USB (KCP)
veya
File Archive USB (Cabinet)
menüleri takip edilerek istenilen seçenekler dahilinde Arşivleme işlemi başlatılır.
Adım 3. Güvenlik Sorusu Yes ile onaylanarak Arşiv oluşturulur. Arşiv oluşturulması tamamlandığında bu
durum Mesaj Penceresinde gösterilir.
Adım 4. Arşivleme İşlemi sonunda, USB Bellek uygun olduğunda sistemden çıkartılır.

ERPE-METEG
152
No Arşiv Geri Yükleme
5-10 Bir Arşivi Geri Yüklemek için aşağıdaki adımlar takip edilmelidir.
DİKKAT
Arşiv Geri Yükleme İşlemi esnasında hataların oluşması, sistemin çalışmaması, insan
ve nesnelerin zarar görmesi gibi sistem sorunlarına meydan vermemek amacıyla
aşağıdaki hususlara dikkat edilmelidir:
Arşiv, yüklenecek sistemin yazılım versiyonuyla uyumlu olmalıdır.
Arşivdeki Teknoloji Paketlerinin versiyonu, yüklenecek sistemde kurulu
versiyonla uyumlu olmalıdır.
Adım 1. Mevcut Sistem ile uyumlu Arşiv dosyası içeren USB Bellek, smartPAD veya Kontrolör üzerindeki
USB Bellek girişine takılır.
Adım 2. smartHMI ana menüsünden File Restore menüleri takip edilerek istenilen seçeneklere bağlı olarak
Geri Yükleme işlemi başlatılır.
Geri Yükleme Seçeneği olarak; Tümü, Uygulamalar veya Sistem verileri seçilebilmektedir.
Adım 3. Güvenlik Sorusu Yes ile onaylanarak Arşivlenmiş Dosyalar, Robot Sistemine Geri Yüklenir. Geri
Yükleme işlemi tamamlandığında bu durum Mesaj Penceresinde gösterilir.
Adım 4. Geri Yükleme işlemi sonunda, USB Bellek uygun olduğunda sistemden çıkartılır.
Adım 5. Endüstriyel Robot Sistemi yeniden başlatılır.

5. Bölüm: Robot Programlamaya Giriş
153
5.5. Günlük Defteri Tutma
Endüstriyel Robot Sistemine yönelik olarak, operatör kumanda işlemleri smartPAD cihazında otomatik olarak bir
Günlük Defterine (Logbook) kaydedilmektedir. Bu sayede sisteme yönelik gerçekleşen işlemlerin incelenmesi
mümkün olabilmektedir. Günlük Defterine her Kullanıcı Grubu erişebilmekte olup, ayrıca Görüntüleme ve
Konfigürasyonu ayarlarını yapabilmektedir. Şekil 5.8’de örnek bir Günlük Defteri Log ekranı görülmektedir.
Şekil 5.8. Günlük Defteri - Log ekranı

ERPE-METEG
154
No Günlük Defteri (Logbook) Görüntüleme
5-11 Günlük Defterini (Logbook) görüntülemek için aşağıdaki adımlar takip
edilmelidir.
Adım 1. smartHMI ana menüsünden Diagnosis Logbook Display menüsü seçilir.
Adım 2. Logbook - Log sekmesi aşağıdaki gibi
görüntülenmektedir.
Adım 3. Logbook - Filter sekmesi ile Filtreleme
işlemleri yapılabilmektedir.

5. Bölüm: Robot Programlamaya Giriş
155
No Günlük Defteri (Logbook) Konfigürasyonu
5-12 Günlük Defteri (Logbook) Konfigürasyonu için aşağıdaki adımlar takip
edilmelidir.
Adım 1. smartHMI ana menüsünden Diagnosis Logbook Configuration menüsü seçilir.
Adım 2. Logbook Configuration penceresi aşağıdaki gibi görüntülenmektedir.
1 Filtre İşlemi Aktif / Pasif.
2 Günlük Defteri (Logbook) Metin Dosyası yolu
3 Arabellek taşması nedeniyle silinen Log verileri, Metin Dosyasında gri renkli arka fonda görüntülenir.

ERPE-METEG
156
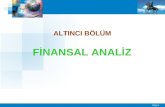
5.6. Uygulamalar
No Konu
U
5-1 Endüstriyel Robot Programı Uygulaması
Yukarıda görülen Parkur üzerinde hareket eden Demo_Tur programının seçilerek çalıştırılması.
1. SmartHMI ekranında R1ProgramErpeMeteg dizinindeki Demo_Tur adlı programı seçiniz.
2. Programı çeşitli Robot Çalışma Modlarında test ediniz.
T1 (%100) T2 (%10, %50, %100) AUT (%25, %50, %75)
3. Programı çeşitli Program Çalışma Modlarında test ediniz.
Go (Program) Motion-Step (Hareket) Single-Step (Tek Adım)
DEF Demo_Tur( )
INI
; HOME Pozisyonuna Git -------------------------------------
PTP HOME Vel= 50 % DEFAULT
; Parkur Baslangic Noktasına Yaklas-------------------------
PTP P1 Vel=100 % PDAT1 Tool[1]:Festo_10 Base[0]
; Parkur Baslangic Noktasına Git----------------------------
LIN P2 Vel=2 m/s CPDAT20 Tool[1]:Festo_10 Base[0]
; Parkur üzerinde Rota Hareketi ----------------------------
LIN P3 CONT Vel=2 m/s CPDAT12 Tool[1]:Festo_10 Base[0]
CIRC P4 P5 CONT Vel=2 m/s CPDAT15 Tool[1]:Festo_10 Base[0]
CIRC P6 P7 CONT Vel=2 m/s CPDAT14 Tool[1]:Festo_10 Base[0]
LIN P8 CONT Vel=2 m/s CPDAT11 Tool[1]:Festo_10 Base[0]
CIRC P9 P10 CONT Vel=2 m/s CPDAT8 Tool[1]:Festo_10 Base[0]
CIRC P11 P12 CONT Vel=2 m/s CPDAT3 Tool[1]:Festo_10 Base[0]
LIN P13 CONT Vel=2 m/s CPDAT16 Tool[1]:Festo_10 Base[0] CD
LIN P14 Vel=2 m/s CPDAT17 Tool[1]:Festo_10 Base[0]
LIN P15 CONT Vel=2 m/s CPDAT18 Tool[1]:Festo_10 Base[0]
; HOME Pozisyonuna Git -------------------------------------
PTP HOME Vel= 50 % DEFAULT
END

5. Bölüm: Robot Programlamaya Giriş
157
5.7. Bölüm Çalışma Soruları
Soru 1. Aşağıdakilerden hangisi seçili bir Robot Programında her hareketin tek tek yürütülmesini sağlayan
moddur?
a) Go b) Motion-Step c) Single-Step d) PTP
Soru 2. Bir Robot Programı, Open (Açma) ile açıldığında aşağıdakilerden hangisi yapılamaz?
a) Yeni program satırları eklenebilir b) Program satırları silinebilir
c) Program çalıştırılabilir d) Hareket komutu yeniden öğretilebilir
Soru 3.
“Bir KUKA robotunun başlangıç sürüşüne ………………. adı verilmektedir.”
Yukarıda verilen ifadede boş bırakılan yere aşağıdakilerden hangisinin gelmesi doğru olur?
a) SAK Sürüşü (BCO) b) Test Sürüşü c) Mantık Sürüşü c) Motion-Step Sürüşü
Soru 4. I. Program hareket komutlarında değişiklik yapılması
II. Program Seçme ve Reset işlemleri
III. Programın işletimi sırasında elle hareket yöntemi
IV. Komut Satırı (Cümle) seçimi sonrasında
Kuka Robotun SAK Sürüşü (BCO) yukarıda verilen durumların hangisinde veya hangilerinde yürütülür?
a) I, II ve III b) I, II ve IV c) I, III ve IV d) Hepsi
Soru 5. POV ve HOV hızları hangi aralıkta ayarlanabilmektedir?
a) 0 – 100 m/sn b) 0 – 250 mm/sn c) 0-100 % d) 0 – 250 %
Soru 6. Robot Program Yorumlayıcı (Robot Interpreter) Durumuna yönelik olarak “Seçilen Program Çalışıyor”
anlamına gelen seçenek aşağıdakilerden hangisidir?
a) b) c) d) e)
Gri
Sarı
Yeşil
Kırmızı
Siyah
Soru 7. Robot Programı çalışırken, Program Blok Göstergesinin “İLERİ yönde Son Noktaya ULAŞILDI.”
durumunda alacağı şekil aşağıdakilerden hangisinde doğru olarak verilmiştir?
a) b) c) d) e)
(Mavi)
(Mavi)
(Kırmızı)
(Kırmızı)
(Mavi)

ERPE-METEG
158
Soru 8. KRL dilinde Endüstriyel Robot program modülleri hangi bölümlerden oluşmaktadır?
a) DEF ve END b) SRC ve DAT c) OPEN ve SELECT d) PTP, LIN ve CIRC
Soru 9. Endüstriyel Robot programının çalıştırılabilmesi için öncelikle aşağıdakilerden hangisi yapılmalıdır?
a) Open b) Select c) Delete d) Change
Soru 10. Bir Endüstriyel Robot programının çalıştırılabilmesi için ilgili program dosyaları hangi klasörde
tutulmalıdır?
a) Root R1 b) Archive Program c) SRC DAT d) smartPAD HMI