4. 5. Маятники 6. Энергия гармонических колебаний...
20
Тема 1. ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ 1. Общие сведения о колебаниях. Виды и признаки колебаний 2. Дифференциальное уравнение гармонических колебаний 3. Кинематика и динамика гармонических колебаний. Упру- гие и квазиупругие силы 4. Графики смещения, скорости и ускорения 5. Примеры гармонических осцилляторов. Маятники 6. Энергия гармонических колебаний 7. Графическое представление колебаний 1.Общие сведения о колебаниях Колебательным движением (колебанием) называется процесс, при кото- ром система, многократно отклоняясь от своего состояния равновесия, каждый раз вновь возвращается к нему. Если этот возврат совершается через равные промежутки времени, то колебание называется периодическим. Иначе говоря, колебания – это процессы, отличающиеся той или иной степенью повторяемо- сти (качания маятника часов, колебания струны или ножек камертона, колеба- ния напряжения между обкладками конденсатора в контуре радиоприемника и т. п.) Колебательные движения широко распространенны в природе и технике. Суточные и годичные изменения температуры воздуха, морские приливы и от- ливы, волнение водной поверхности, биение сердца, дыхание, тепловое движе- ние ионов кристаллической решетки твердого тела, переменный ток и его элек- трическое поле, движение электронов в атоме и т. д. – все это колебательные процессы. Во многих случаях они играют отрицательную роль. Колебания мо- ста, возникающие из – за толчков, сообщаемых ему колесами поезда при про- хождении через стыки рельсов; колебания (вибрации) корпуса корабля, вы- званные вращением гребного винта; вибрации крыльев самолета – все эти про- цессы могут привести к катастрофическим последствиям. В подобных случаях задача заключается в том, чтобы предотвратить возникновение колебаний или, во всяком случае, воспрепятствовать тому, чтобы колебания достигли опасных размеров. Вместе с тем колебательные процессы лежат в самой основе различных отраслей техники. Так, например, на колебательных процессах основана вся ра- диотехника. В зависимости от физической природы колебательного процесса, разли- чают колебания: механические (колебания частей машины и механизмов, зда- ний, мостов и других сооружений, давления воздуха при распространении в нем звука и т. п.), электромагнитные (колебания переменного электрического тока, электромагнитного поля и т. д.), электромеханические (колебания мем- браны телефона, диффузора электродинамического громкоговорителя и т. п.);
Transcript of 4. 5. Маятники 6. Энергия гармонических колебаний...

Тема 1. ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ
1. Общие сведения о колебаниях. Виды и признаки колебаний 2. Дифференциальное уравнение гармонических колебаний 3. Кинематика и динамика гармонических колебаний. Упру-гие и квазиупругие силы 4. Графики смещения, скорости и ускорения 5. Примеры гармонических осцилляторов. Маятники 6. Энергия гармонических колебаний 7. Графическое представление колебаний
1.Общие сведения о колебаниях Колебательным движением (колебанием) называется процесс, при кото-
ром система, многократно отклоняясь от своего состояния равновесия, каждый раз вновь возвращается к нему. Если этот возврат совершается через равные промежутки времени, то колебание называется периодическим. Иначе говоря, колебания – это процессы, отличающиеся той или иной степенью повторяемо-сти (качания маятника часов, колебания струны или ножек камертона, колеба-ния напряжения между обкладками конденсатора в контуре радиоприемника и т. п.)
Колебательные движения широко распространенны в природе и технике. Суточные и годичные изменения температуры воздуха, морские приливы и от-ливы, волнение водной поверхности, биение сердца, дыхание, тепловое движе-ние ионов кристаллической решетки твердого тела, переменный ток и его элек-трическое поле, движение электронов в атоме и т. д. – все это колебательные процессы. Во многих случаях они играют отрицательную роль. Колебания мо-ста, возникающие из – за толчков, сообщаемых ему колесами поезда при про-хождении через стыки рельсов; колебания (вибрации) корпуса корабля, вы-званные вращением гребного винта; вибрации крыльев самолета – все эти про-цессы могут привести к катастрофическим последствиям. В подобных случаях задача заключается в том, чтобы предотвратить возникновение колебаний или, во всяком случае, воспрепятствовать тому, чтобы колебания достигли опасных размеров.
Вместе с тем колебательные процессы лежат в самой основе различных отраслей техники. Так, например, на колебательных процессах основана вся ра-диотехника.
В зависимости от физической природы колебательного процесса, разли-чают колебания: механические (колебания частей машины и механизмов, зда-ний, мостов и других сооружений, давления воздуха при распространении в нем звука и т. п.), электромагнитные (колебания переменного электрического тока, электромагнитного поля и т. д.), электромеханические (колебания мем-браны телефона, диффузора электродинамического громкоговорителя и т. п.);

2
химические (колебания концентраций реагирующих веществ и т. п.); термоди-намические (различные тепловые колебания), звуковые, яркостные и т. д.
Система, совершающая колебания, называется колебательной. В зависимости от характера воздействия на колеблющуюся систему раз-
личают свободные (или собственные) колебания, вынужденные колебания, ав-токолебания и параметрические колебания.
Свободными (или собственными) колебаниями называют колебания, ко-торые происходят в системе в отсутствие переменных внешних воздействий и возникают вследствие какого-либо начального отклонения системы от состоя-ния ее устойчивого равновесия. Примером могут служить колебания шарика, подвешенного на нити (маятник). Для того, чтобы вызвать колебания, можно либо толкнуть шарик, либо, отведя в сторону, отпустить его.
Вынужденными называются такие колебания, в процессе которых колеб-лющаяся система подвергается воздействию внешней периодически изменяю-щейся силы. Примером служат колебания моста, возникающие при прохожде-нии по нему поезда, вибрации корпуса корабля, крыльев самолета.
Автоколебания как и вынужденные колебания, происходят под воздей-ствием на колеблющуюся систему внешних сил, однако моменты времени, ко-гда осуществляются эти воздействия, создаются самой колеблющейся систе-мой. Система сама управляет внешним воздействием. Примером автоколеба-тельной системы являются часы, в которых маятник получает толчки за счет энергии поднятой гири или закрученной пружины, причем эти толчки происхо-дят в моменты прохождения маятника через среднее положение.
При параметрических колебаниях - за счет внешнего воздействия проис-ходит периодическое изменение какого – либо параметра системы, например, изменение длины нити, к которой подвешен шарик, совершающий колебания.
Несмотря на большое разнообразие колебательных процессов, как по фи-зической природе, так и по степени сложности, все они имеют некоторые об-щим закономерности.
Основной характеристикой колебаний является их повторяемость. Коле-бания называются периодическими, если значения всех физических величин, характеризующих колебательную систему и изменяющиеся при ее колебаниях, повторяются через равные промежутки времени. Такой наименьший промежу-ток времени называется периодом колебаний Т. За период колебаний система совершает одно полное колебание. Частотой колебаний называется величина
T1=ν , равная числу полных колебаний, совершаемых за единицу времени. Ве-
личина Тπ
=πν=ω22 называется циклической (круговой) частотой перио-
дических колебаний. При периодических колебаниях зависимость изменяющейся физической
величины s от времени t удовлетворяет условию ( ) ( )tsTts =+ .

3
2. Дифференциальное уравнение гармонических колебаний Простейшим типом колебательного движения являются гармонические
колебания – движение, при котором колеблющаяся величина изменяется с те-чением времени по закону синуса или косинуса.
Периодические изменения величины ( )ts называются гармоническими,
если ( ) ( )0sin ϕ+ω= tAts или ( ) ( )0cos ϕ+ω= tAts , где constТ
=π
=πν=ω22 -
циклическая (круговая) частота периодических колебаний; 0max >== constsA - максимальное значение изменяющейся величины s, назы-
ваемой амплитудой колебаний; φ0 – постоянная величина. В произвольный момент времени t значение s определятся значением фазы колебаний ( ) 0ϕ+ω=ϕ tt . Величина φ0 определяет начальную фазу колебаний, т.е. значе-
ние φ(t) в момент времени t=0. Следует подчеркнуть, что первая и вторая про-изводные по времени от гармонически изменяющейся величины ( )ts также из-меняются по гармоническому закону с такой же циклической частотой, что и ( )ts : если ( ) ( )0sin ϕ+ω= tAts , то
( )
π
+ϕ+ωω=ϕ+ωω=2
sincos 00 tAtAdtds ,
( ) ( )π+ϕ+ωω=ϕ+ωω−= 02
02
2
2
sinsin tAtAdt
sd .
Следует обратить внимание на то, что амплитудное значение величины
dtds равно ωA , а начальная фаза колебаний этой величины равна
π
+ϕ20 , т.е.
разность фаз между dtds и s постоянна и равна 2
π . Величина dtds опережает s
по фазе на 2π . Амплитудное значение величины 2
2
dtsd равно 2ωA , а началь-
ная фаза колебаний этой величины равна ( )π+ϕ0 , т.е. разность фаз между 2
2
dtsd
и s постоянна и равна π . Величина 2
2
dtsd опережает s по фазе на π .
Кроме того из уравнения ( ) ( )π+ϕ+ωω=ϕ+ωω−= 02
02
2
2
sinsin tAtAdt
sd , с
учетом ( ) ( )0sin ϕ+ω= tAts , следует, что гармонически изменяющаяся величина
удовлетворяет дифференциальному уравнению 022
2
=ω+ sdt
sd . Общее решение
этого уравнения: tAtAs ω+ω= cossin 21 , где А1 и А2 – произвольные постоян-

4
ные интегрирования, значения которых можно определить из начальных усло-
вий. Например, зная и в начальный момент времени: 0
11
=
ω=
tdtdsA ,
( )02 sA = . Общее решение тогда можно привести к виду ( ) ( )0sin ϕ+ω= tAts , где
22
21 AAA += ,
=ϕ
1
20 A
Aarctg .
Таким образом, физическая величина s совершает гармонические коле-
бания в том и только в том случае, если она удовлетворяет уравнению
022
2
=ω+ sdt
sd , называемому дифференциальным уравнением гармонических ко-
лебаний. Колебательные системы, состояние которых описывается уравнением
022
2
=ω+ sdt
sd , называется гармоническим осциллятором.
При гармонических колебаниях физическая величина изменяется со вре-
менем по закону синуса или косинуса. Этот вид колебаний особенно важен по следующим причинам: 1) колебания в природе и в технике часто имеют харак-тер очень близкий к гармоническим колебаниям, 2) периодические процессы иной формы (с другой зависимостью от времени) могут быть представлены как наложение нескольких гармонических колебаний.
3. Кинематика и динамика гармонических колебаний Кинематика гармонических колебаний
Колебательным движением материальной точки называют любое движе-ние, при котором все физические величины, описывающие движение, являются периодическими функциями времени.
К числу важнейших физических величин, описывающих движение мате-риальной точки, относятся

5
а) радиус-вектор частицы ( )r t , б) вектор скорости частицы ( ),tυ в) вектор ускорения частицы ( ).a t Поскольку при известном радиус-векторе ( )r t материальной точки, век-
торы скорости и ускорения определяются однозначно, то колебательным движением материальной точки называют движение,
при котором радиус-вектор частицы является периодической функцией вре-мени.
Кинематика гармонических колебаний
Свободным гармоническим колебанием материальной точки является та-кое колебательное движение, при котором радиус-вектор частицы является гармонической функцией времени.
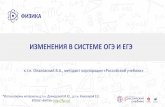
Гармоническое колебание можно наглядно представить, рассмотрев периодическое враще-ние материальной точки М по окружности ра-диуса r с центром в точке О с постоянной уг-ловой скоростью ω.
Составим кинематические уравнения движения материальной точки. Ось x совпадает с одним из диаметров окруж-ности (x = 0 в точке О). Положение точки М на
плоскости в любой момент времени задаётся радиус-вектором r , проведенным к ней из точки О . Точка N – проекция на ось x точки M – будет совершать гармонические колебания между двумя крайними положениями, координаты которых равны –A и A. Из рисунка видно, что зависимость от времени коорди-наты x точки N определятся уравнением )cos(cos 0ϕ+ω=ϕ= trrx , где
00 ϕ+ω=ϕ t – угол, который составляет к моменту времени t радиус-вектор r с осью x; при t = 0 0ϕ=ϕ . Таким образом, движение точки N вдоль оси x имеет характер гармонического колебания. Для описания колебательного движения применяются специальные термины: координата x , определяющая положение точки N относительно точки О – называется смещением точки N; максимальное смещение материальной точ-ки относительно положения равновесия называется амплитудой колебания
rAx ==max (длина радиус-вектора r ); угловая скорость вращения ω0 называ-ется циклической частотой колебаний; а угол 0ϕ+ω=ϕ t между радиус-вектором r и осью x в момент времени t называется фазой колебания. В начальный момент времени при t = 0 угол φ равен φ0 – начальной фазе. Точка О (точка, в которой смещение x = 0) – положение равновесия. Так как
X
v
О
r
ϕ
M Y
ω
N
A –A

6
rAx ==max , то )(cos)cos(cos 00 ϕ+ω=ϕ+ω=ϕ= tAtrrx –
уравнение колебаний. Для определения скорости колебательного движения по оси x рассмотрим произвольное положение материальной точки на окружности в момент времени t. Скорость материальной точки, движущейся по окружности, направлена перпендикулярно радиус-вектору r и образует с осью y угол φ, равный углу поворота радиус-
вектора в момент времени t. Горизонтальная компонента скорости направлена противоположно оси x. Поэтому проекция скорости на ось x равна
)(sinsinsin 0ϕ+ωω−=ϕω−=ϕ−= trrvvx , так как 0ϕ+ω=ϕ t – угол между радиус-вектором r и осью x в момент времени t; а линейная скорость движе-ния точки по окружности связана с угловой скоростью вращения выражением
rv ω= . Так как максимальное смещение материальной точки относительно положения равновесия точки О равно амплитуде колебаний rA = (длина радиус-вектора r ), то )(sinsin 0ϕ+ωω−=ϕω−= tAAxv – уравнение проекции скорости. Найдём зависимость проекции ускорения на ось x от времени при движении материальной точки по окружности с постоянной скоростью. При движении точки по окружности центростремительное ускорение материальной точки направлено к центру окружности и равно ran
2ω= . Горизонтальная компонента центростремительного ускорения направлена противоположно оси x. Поэтому проекция вектора ускорения на ось x равна
)(cos)cos(cos 02
0 ϕ+ωω−=ϕ+ω−=ϕ−= trtaaa nnx
, так как 0ϕ+ω=ϕ t – угол между радиус-вектором r и осью x в момент времени t; а центростремительное ускорение равно
ran2ω= .
Так как максимальное смещение материаль-ной точки относительно положения равнове-сия точки О равно амплитуде колебаний
rA
= (длина радиус-вектора r ), то )(cos)cos( 0
20 ϕ+ωω−=ϕ+ω−= tAtaa nx –
уравнение проекции ускорения. Так как смещение материальной точки описывается уравнением
)(cos 0ϕ+ω= tAx , то xtAax2
02 )(cos ω−=ϕ+ωω−= . Или 02
2
2
=ω+ xdt
xd -
дифференциальное уравнение гармонических колебаний.
v
О ϕ
M
X
Y
ω
N
A –A
xv
yv
r
ϕ
О ϕ
M
X
Y
ω0
N A
–A
xa
ya na

7
Динамика гармонических колебаний. Упругие и квазиупругие силы Материальная точка совершает гармонические колебания в том и только
в том случае, если ее смещение удовлетворяет уравнению 022
2
=ω+ xdt
xd , назы-
ваемому дифференциальным уравнением гармонических колебаний, то xax
2ω−= . По второму закону Ньютона сила, вызывающая гармонические ко-лебания: xmmaF xx
2ω−== . Обозначим km =ω2 , тогда циклическая частота
колебаний mk
=ω , а период таких колебаний kmT π=
ωπ
= 22 .
Тогда уравнение xmmaF xx2ω−== примет вид: kxF −= .
Анализ полученного выражения позволяет отметить некоторые особенности сил, вызывающих гармонические колебания:
• величина силы, вызывающей гармонические колебания, должна быть пропорциональна смещению;
• направление силы, вызывающей гармонические колебания, должно быть противоположно смещению.
Если сила, описываемая выражением kxF −= , является силой упругости, ее называют упругой силой, если имеет другую физическую природу – квазиу-пругой силой. Колебательная система, представляющая собой материальную частицу массой m , которая движется вдоль некоторой оси x под действием упругой kxF −=
(или квазиупругой) силы пропорциональной от-клонению частицы от положения равновесия, называется линейным гармоническим осцил-лятором. Механическая модель гармонического осцилля-тора: материальная точка массой m, колеблю-щаяся под действием упругой kxF −= (или квазиупругой) силы пропорциональной откло-
0 x
x
m k
xkFупр
−=
упрF

8
нению частицы от положения равновесия вдоль некоторой оси x.
4. Графики смещения, скорости и ускорения Если материальная точка совершает гармонические колебания, то её смещение зависит от времени по гармоническому закону )cos( 0ϕ+ω= tAx или
)sin( 0ϕ+ω= tAx , где A – амплитуда колебаний, ω0 – циклическая частота,
0ϕ+ω t – фаза колебаний, φ0 – начальная фаза.
Так как )2
(cos)(sin 00π
+ϕ+ωω=ϕ+ωω−== tAtAdtdx
xv – скорость изменя-
ется по гармоническому закону с той же циклической частотой, что и коорди-ната. Амплитудное (максимальное) значение скорости равно ωA . Фаза коле-
баний скорости отличается от фазы колебаний смещения на 2π . Следовательно,
в момент времени, когда смещение x = 0, скорость принимает максимальное значение. Когда же смещение достигает максимального отрицательного значе-ния, то скорость 0=xv . Ускорение
)(cos 02 ϕ+ωω−== tA
dtdax
xv )(cos 02 π+ϕ+ωω= tA
– ускорение изменяется по гармоническому закону с той же циклической ча-стотой, что и координата. Амплитудное (максимальное) значение ускорения равно 2ωA . Фаза колебаний ускорения отличается от фазы колебаний смеще-ния на π. Следовательно, в момент времени, когда смещение x = 0, ускорение принимает максимальное отрицательное значение. Когда же смещение достига-ет максимального отрицательного значения, то скорость 0=xv , а ускорение принимает наибольшее положительное значение. Можно показать, что
xax2ω−= или 02
2
2
=ω+ xdt
xd - дифференциальное уравнение гармонических
колебаний. На рисунке представлены графики смещения, скорости и ускорения матери-
альной точки движущейся по окружности с постоянной скоростью.

9
5. Примеры гармонических осцилляторов. Маятники Колебания гармонического осциллятора являются важным примером пе-
риодического движения, и служат точной или приближенной моделью во мно-гих задачах классической и квантовой физики. Примерами гармонического ос-циллятора являются пружинный, математический и физический маятники, а также колебательный контур (для малых токов и напряжений). 1. Пример 1. Пружинный маятник. Пружинный маятник – это массивное те-ло, укрепленное на невесомой упругой пружине и совершающее колебания.
Рассмотрим систему, состоящую из ша-рика массы m , подвешенного на пружине . В состоянии равновесия сила mg уравновешива-ется упругой силой (по закону Гука)
lkmg ∆= , где k – коэффициент жесткости пружины,
l∆ – удлинение пружины. Будем характеризовать смещение шарика из положе-ния равновесия координатой x , причем ось ОХ направлена по вертикали вниз, а нуль оси совместим с положением равновесия шарика. Если сместить шарик от положения равновесия на
расстояние x , то удлинение пружины станет xl +∆ и проекция результирую-щей силы на ось x примет значение:
)( xlkmgf +∆−= . Учитывая условие равновесия, получим, что:

10
kxf −= . Знак “–” в формуле отражает то обстоятельство, что смещение и сила имеют противоположные направления. Таким образом, сила f обладает следующими свойствами: 1) она пропорциональна смещению шарика из положения равнове-сия; 2) она всегда направлена к положению равновесия. При выводе системы из состояния устойчивого равновесия в системе появляются силы, стремящиеся вернуть её в это положение. Эти силы называются возвращающими. В рассмотренном примере сила f по своей природе упругая. Уравнение второго закона Ньютона для шарика имеет вид:
kxdt
xdm −=2
2
или 02
2
=+ xmk
dtxd ,
где mk – положительная величина и поэтому можно записать 2ω=
mk ; где ω –
циклическая частота. Тогда получим:
022
2
=ω+ xdt
xd .
Данное выражение представляет собой дифференциальное уравнение гармони-ческих колебаний, решение которого имеет вид: )cos( 00 ϕ+ω= tAx или
)sin( 0ϕ+ω= tAx . Период колебаний такого маятника kmT π=
ωπ
= 22 .
2. Пример 2. Пружинный маятник. Рассмотрим другой пример пружинного маятника.
Рассмотрим пример колебательной системы, состоящей из шарика массой m, прикреплённого к вертикальной стенке пружиной жесткостью k. Шарик может без трения перемещаться по горизонтальному стержню (поверхности).
При любом положении шарика сила тяжести gm и сила реакции стержня N
уравновешивают друг друга. На рисунке представлены свободные колебания пру-жинного маятника: а) шарик находится в положении равновесия (пружи-на не растянута; сила тяжести и сила реакции стержня компенсируют друг друга); б) начальное смещение шарика от положения равно-весия (максимальное сжатие пружины, начальная ско-рость равна нулю); в) возвращение шарика в положение равновесия (пру-жина не деформирована, максимальная скорость ша-рика); шарик по инерции проходит положение равно-весия и начинает растягивать пружину;
г) остановка шарика – точка поворота (максимальное смещение шарика относи-тельно положения равновесия, максимальное растяжение пружины, скорость равна нулю);

11
д) возвращение шарика в положение равновесия (пружина не деформирована, максимальная скорость шарика; е) возвращение шарика в начальное положение (максимальное сжатие пружи-ны, скорость равна нулю).
Запишем уравнение движения шарика. Шарик совершает колебательное движение только под действием упругих сил. При деформации пружины на ве-личину x на шарик начинает действовать сила упругости, направленная к по-ложению равновесия (противоположно смещению). По закону Гука xkFупр
−= ; сила упругости – возвращающая сила.
По второму закону Ньютона сила упругости сообщает шарику ускорение amFупр
= . Тогда уравнение движения шарика: amxk
=− , в проекции на ось x
(направление движения) kxmax −= или xmkax −= .
Из кинематики колебательного движения: если материальная точка (тело) совершает колебательное движение по закону )cos( 0ϕω += tAx или
)sin( 0ϕ+ω= tAx , где A – амплитуда колебаний, ω – циклическая частота,
0ϕ+ω t – фаза колебаний, φ0 – начальная фаза, то xax ⋅ω−= 2 .
Из сравнения следует, что mk
=ω2 или период колебаний пружинного маятника
kmT π=
ωπ
= 22 .
3. Пример 3. Математический маятник. Математический маятник – это подвешенное на
невесомой нерастяжимой нити тело (материальная точка), способное под действием приложенных к нему сил совер-шать колебания около положения равновесия.
Рассмотрим условия, при которых колебания маятни-ка являются гармоническими.
Отклонения маятника от положения равновесия бу-дем характеризовать углом α, образованным нитью с вер-тикалью.
При отклонении маятника от вертикали, возникает вращающий момент, модуль которого α= sinМ mgl
. Он имеет такое направление, что стремится вернуть маятник в положение равновесия, и в этом отношении он аналоги-
чен квазиупругой силе. Поэтому можно записать α−= sinmglM .
Уравнение динамики вращательного движения для маятника: εJM = ,
где 2mlJ = – момент инерции маятника, 2
2
dd
tα
=ε – угловое ускорение.

12
Тогда α−=α sin
dd
2
22 mgl
tml , или 0sin
dd
2
2
=α+α
lg
t
Рассмотрим колебания с малой амплитудой, т.е. ααsin ≈ , и введем обо-
значение 2ω=lg . Тогда получим дифференциальное уравнение колебаний ма-
ятника:
0dd 2
2
2
=αω+α
t.
Решение этого уравнения имеет вид )cos( 0φ+ωα=α tm .
Следовательно, при малых колебаниях угловое отклонение математиче-ского маятника изменяется во времени по гармоническому закону.
Циклическая частота колебаний Tl
g π==ω
2 , тогда период
glT π= 2 .
Т.е. период Т – зависит только от длины маятника и ускорения свободно-го падения.
4. Пример 4. Физический маятник. Физический маятник – это твердое тело, которое может вращаться под
действием силы тяжести вокруг неподвижной горизонтальной оси, не прохо-дящей через центр тяжести. Обозначим расстояние от точки подвеса до центра тяжести l=ОС.
В положении равновесия центр инерции маятника C находится под точкой подвеса маятника O , на одной с ней вертикали. При отклонении маятника от положения равновесия на угол α возникает вращательный момент, модуль
которого α= sinМ mgl
. Он имеет такое направ-ление, что стремится вернуть маятник в положение равновесия, и в этом отношении он аналогичен квазиупругой силе. Поэтому можно записать
α−= sinmglM , где m – масса маятника, l – расстояние между точкой подвеса и цен-тром инерции маятника С.
Обозначая момент инерции маятника отно-сительно оси, проходящей через точку подвеса буквой J, можно написать:
α−=ϕ sin2
2
mgldtdJ .
В случае малых колебаний α≈αsin , тогда

13
022
2
=αω+α
dtd ,
где:
Jmgl
=ω 2 .
Из уравнения 022
2
=αω+α
dtd следует, что при малых отклонениях от по-
ложения равновесия физический маятник совершает гармонические колебания, описываемые уравнением ( )00 cos ϕ+ωα=α t , частота которых зависит от мас-сы маятника, момента инерции маятника относительно оси вращения и рассто-яния между осью вращения и центром инерции маятника.
Период колебания физического маятника определяется выражением:
mglJT π= 2 .
Из сопоставления выражений glT π= 2 и
mglJT π= 2 получается, что
математический маятник с длиной:
mlJlпр =
будет иметь такой же период колебаний, как и данный физический маятник.
Величину mlJlпр = называют приведенной длиной физического маятника.
Таким образом, приведенная длина физического маятника – это длина такого математического маятника, период колебаний которого совпадает с периодом данного физического маятника.
По теореме Штейнера момент инерции маятника J может быть пред-ставлен в виде:
20 mlJJ += ,
где J0 – момент инерции относительно оси, параллельной оси вращения и про-ходящей через центр инерции маятника.
Подставив в уравнение mlJlпр = , получим:
lmlJlпр += 0 .
Из чего следует, что приведенная длина lпр всегда больше l , так что точка подвеса и центр качания лежат по разные стороны от центра инерции.
Точка на прямой, соединяющей точку подвеса O с центром инерции С, лежащая на расстоянии приведенной длины от оси вращения, называется цен-тром качания физического маятника (точка O′).
Если подвесить маятник в точке, совпадающей с центром качания O′ , то
приведенная длина в этом случае будет равна:

14
llm
Jlпр ′+′
=′ 0 ,
где l ′ – расстояние между первоначальным центром качания и центром инер-ции маятника.
Учитывая, что lmlJlпр += 0 и lll прпр −=′ , выражение можно записать сле-
дующим образом:
mlJll
mlJlпр
00 =−+=′ .
С другой стороны lmlJ
mlJm
JmlJl
lmJlпр +=+=′+′
=′ 0
0
000
Таким образом, при подвешивании маятника в центре качания приведен-ная длина, а значит, и период колебаний будут теми же, что и вначале. Следо-вательно, точка подвеса и центр качания обладают свойством взаимности: при переносе точки подвеса в центр качания прежняя точка подвеса становится но-вым центром качания.
На установленном нами свойстве взаимности основано определение ускорения силы тяжести с помощью, так называемого, оборотного маятника. Оборотным маятником называется такой маятник, у которого имеются две па-раллельные друг другу, закрепленные вблизи его концов опорные призмы, за которые он может поочередно подвешиваться. Вдоль маятника могут переме-щаться и закрепляться на нем тяжелые грузы. Перемещением грузов добивают-ся того, чтобы при подвешивании маятника за любую из призм период колеба-ний был одинаков. Тогда расстояние между опорными ребрами призм будет равно прl .
Измерив период колебания маятника, и зная прl можно по формуле
gl
T прπ= 2 найти ускорение силы тяжести g .
5. Пример 5. Колебательный контур. При-
мером электрической цепи, в которой могут про-исходить свободные электрические колебания, служит простейший колебательный контур, со-стоящий из конденсатора емкостью С и соеди-ненной с ним последовательно катушки индук-тивности L . При замыкании на катушку предва-рительно заряженного конденсатора в колеба-тельном контуре возникают свободные колебания
заряда конденсатора и тока в катушке. Активное сопротивление колебательного контура R=0/
При рассмотрении электрических колебаний приходится иметь дело с токами, изменяющимися со временем. Закон Ома и вытекающие из него прави-

15
ла Кирхгофа были установлены для постоянного тока. Однако, они остаются справедливыми и для мгновенных значений изменяющихся токов и напряже-ния, если только их изменения происходят не слишком быстро. Электромаг-нитные возмущения распространяются по цепи с огромной скоростью, равной скорости света C . Если за время C
l=τ (l – длина цепи), необходимое для пе-редачи возмущения в самую отдаленную точку цепи, сила тока изменяется не-значительно, то мгновенные значения силы тока во всех сечениях цепи будут практически одинаковыми. Токи, удовлетворяющие такому условию, называ-ются квазистационарными. Для периодически изменяющихся токов условие квазистационарности имеет вид:
TCl<<=τ ,
где T – период изменений. Для цепи длиной 3м, запаздывание c10 8−=τ . Таким образом, вплоть до
T порядка c10 6− (что соответствует частоте Гц106 ) токи в такой цепи можно считать квазистационарными. Ток промышленной частоты ( Гц50=ν ) квазиста-ционарен для цепей длиной до км100≈ .
Мгновенные значения квазистационарных токов подчиняются закону Ома и, следовательно, для них справедливы правила Кирхгофа.
В дальнейшем при изучении электрических колебаний мы всегда будем предполагать, что рассматриваемые токи квазистационарны.
Найдем уравнение колебаний в контуре без активного сопротивления.
Будем исходить из того, что во время колебаний внешнее напряжение к конту-ру не приложено, ток, заряжающий конденсатор положительный. Тогда по за-
кону Кирхгофа: cUIR ξ=+ так как CqU = , а
dtdILc −=ξ и R=0, то
dtdIL
CqIR −=+ , или 0=+
Cq
dtdIL ,
так как dtdqI = , то 02
2
=+LCq
dtqd Данное уравнение можно привести к
виду: 022
2
=ω+ qdt
qd - дифференциальное уравнение гармонических колеба-
ний, где LC1
=ω – циклическая частота колебаний.
Решением уравнения дифференциального уравнения будет: )cos( α+ω= tqq m .
Таким образом, заряд на обкладках конденсатора изменяется по гармо-
ническому закону с частотой, определяемой выражением LC1
=ω . Эта часто-
та называется собственной частотой контура. Отсюда период колебаний:

16
LCT π= 2 (формула Томсона). Напряжение на конденсаторе:
)cos()cos( α+ω=α+ω== tUtCq
CqU m
m ,
где CqU m
m = ..
Продифференцировав выражение )cos( α+ω= tqq m по времени, полу-чим выражение для силы тока:
)2/cos()sin( π+α+ω=α+ωω−= tItqI mm , где mm qI ω= . Таким образом, сила тока опережает по фазе напряжение
на конденсаторе на 2π .
Можно получить связь между максимальными значениями тока в цепи
и максимальным значением напряжения на конденсаторе: CL
qCq
IU
m
m
m
m =ω
=
или
CLIU mm = . Полученное соотношение между mU и mI по форме подоб-
но закону Ома для участка цепи постоянного тока, поэтому величину CL
называют волновым сопротивлением колебательного контура. Сравнительный анализ механических и электрических гармонических ко-лебаний представлен на рисунке.
6. Энергия гармонического колебания Механические колебания

17
Покажем, что упругая (квазиупругая) сила является консервативной, то есть ее работа не зависит от формы траектории, а только от положения ее начальной и конечной точки. При вычислении потенциальной энергии квазиу-пругих сил условимся отсчитывать ее от положения равновесия, т.е. положим, что при x =0 0=пE . Тогда потенциальная энергия в точке x численно равна работе квазиупругой силы, совершенной при перемещении из положения рав-новесия в данную точку и взятой с обратным знаком:
Элементарная работа упругой (квазиупругой) силы dA Fdx= =- kxdx Тогда потенциальная энергия колеблющейся точки при ее смещении от
положения равновесия равном x: ∫∫ ==−=xx
пkxkxdxFdxE
0
2
0 2 .
Подставляя вместо x его значение по уравнению )cos( 0ϕ+ω= tAx окончательно получим
( ) ( ) ( )[ ]0
220
2220
22
2cos142
cos2
cosϕ+ω+
ω=
ϕ+ωω=
ϕ+ω= tAmtAmtkAEп .
Следовательно, потенциальная энергия меняется с частотой 2ω. Кинетическая энергия материальной точки, совершающей гармонические
колебания с частотой ω, определяется :
( )
π
+ϕ+ωω
=ϕ+ωω
==2
cos2
sin22 0
222
02
222
tAmtAmmvEk . Используя известное
тригонометрическое равенство ( )ϕ+=ϕ 2cos121cos2 , можно записать
([ π+ϕ+ω+ω
=
π
+ϕ+ω+ω
=
π
+ϕ+ωω
= 0
2
0
22
02
22
22cos142
2cos142
cos2
tAmtAmtAmEk
Таким образом, кинетическая энергия также меняется со временем по гармони-ческому закону, но по сравнению с координатой x имеет частоту равную 2ω.
Найдем полную энергию материальной точки массой m , совершающей гармонические колебания с частотой ω и амплитудой А:
( ) ( )[ ]22
sincos2
222
002
22 kAAmttAmEEE пk =ω
=ϕ+ω+ϕ+ωω
=+= .
Таким образом, полная энергия гармонически колеблющейся точки есть величина постоянная и пропорциональная квадрату амплитуды колебаний. В процессе движения происходит непрерывный переход кинетической энергии в потенциальную и обратно, но сумма их при этом остается постоянной.
Электрические колебания Если в колебательном контуре происходят колебания заряда по за-
кону )cos( α+ω= tqq m , то изменение тока в этом контуре происходят соглас-но уравнению )2/cos()sin( π+α+ω=α+ωω−= tItqI mm , где mm qI ω= .
При свободных гармонических колебаниях в колебательном контуре происходит периодическое преобразование энергии электрического поля кон-денсатора в энергию магнитного поля катушки индуктивности и наоборот:

18
)(cos22 0
222
ϕ+ω== tC
qC
qW mэ
)(sin22 0
222
ϕ+ω== tLILIW mм . Колебания, происходящие в колебательном
контуре, часто называют электромагнитными колебаниями. Полная энергия электромагнитных колебаний
constLIC
qWWW mmмэ ===+=
22
22
.
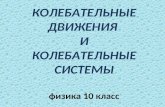
На рисунке показана зависимость потенциальной и кинетической энергии от смещения (механические колебания) и зависимость энергий, запасенных к катушке индуктивности и в конденсаторе, от заряда (электрические колебания)
механические колебания электрические колебания
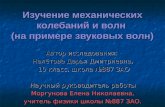
7. Графическое представление колебаний Гармонические колебания удобно изображать с помощью векторных диа-
грамм. Из начала оси абсцисс проведем вектор А
, проекция которого на ось ОХ равна ϕcosA . Если вектор А
будет рав-номерно вращаться в угловой скоростью ω против часовой стрелки, то φ=ωt+φ0, где φ0 – начальная фаза. Проекция вектора А
на ось ОХ будет изменяться со временем по закону
)cos( 0ϕ+ω= tAx . В таком представлении амплитуда колебаний А – это длина равно-мерно вращающегося вектора А
, фаза коле-бания – угол между вектором А
и осью ОХ, ω – циклическая частота колеба-ний, смещение колеблющейся точки - это проекция вектора А
на ось ОХ. Если материальная точка совершает гармонические колебания, то её смещение зависит от времени по гармоническому закону )cos( 0ϕ+ω= tAx , где A – ам-плитуда колебаний, ω– циклическая частота, 0ϕ+ω t – фаза колебаний, φ0 – начальная фаза.
W
2
2qLWм
=
CqWэ 2
2
=
-qm +qm q 2mq
− 2mq
+
Е
2
21 xkEk =
2
21 kxEп =
-А +А x 2
A−
2A
+
А
О Х Acosφ
φ
ω

19
То скорость )2
(cos)(sin 00π
+ϕ+ωω=ϕ+ωω−== tAtAdtdx
xv – скорость из-
меняется также по гармоническому закону с той же циклической частотой, что и координата. Амплитудное (максимальное) значение скорости равно ωA . Фа-
за колебаний скорости отличается от фазы колебаний смещения на 2π .
Ускорение
)(cos 02 ϕ+ωω−== tA
dtdax
xv )(cos 02 π+ϕ+ωω= tA
– ускорение изменяется по гармо-ническому закону с той же циклической частотой, что и координата. Амплитуд-ное (максимальное) значение ускорения равно 2ωA . Фаза колебаний ускорения отличается от фазы колебаний смещения на π.
Векторные диаграммы смещения, скорости и ускорения представлены на рисунке.
x, v, a O
φ
A
mv
ma

20