
LMDD350/500 - 京町産業車輌型式 適応ドラム 荷重 最高高さ・ ドラム底面(A) 全高 (C) 全幅 (D) 全長 (B) 前脚 前車輪 (Y) 後車輪

1
3Dスマートセンサー –移動車輌でオペレーターをアシスト
www.ifm.com/jp/o3m
3D sen
sors

2
移動車輌用制御システム
車輌アプリケーション用3Dセンサー
ifm社のPMD 3Dセンサーはたった1つのイメージ
を捉えるだけで背景と物体を3次元で検出します。
これはラインスキャナーで発生する可能性のある動
作ブレを防ぎます。センサーシステムは車輌アプリ
ケーションの過酷な稼働条件に適応できるように特
許を取得したPMDテクノロジーをベースにしてい
ます。3Dセンサーシステムは、堅牢でコンパクト
なデザインの他、特に外乱光や直射日光がある屋外
のアプリケーションのために設計されました。レー
ザースキャナー等の他のセンサーと比べると、ifm
社の3Dセンサーには可動部がありません。そのた
めセンサーは非常に堅牢で摩耗することがありませ
ん。
機能原理にはタイムオブフライト方式(ToF)をベー
スにしたPMDテクノロジーを採用しています。変
調された非可視光の赤外線が背景を照射し、反射し
た光はPMDセンサーに到達します。また、センサ
ーは変調光源にも接続しています。PMDチップ上
の各ピクセルが、投光信号と受光信号間の位相から
背景までの距離を測定します。内蔵の背景抑制機能
で外乱光によるイメージセンサーの飽和状態をほぼ
完全に防ぎます。これはPMD 3Dセンサーが最大
120klxまでの明るさ(太陽光等)の下で動作可能なこ
とを意味します。
3Dセンサー O3M
エッジの認識 走行ラインの誘導
衝突の予測
距離の監視 物体認識 反射体の追尾

3
3次元で背景を検出し物体を自動的に検出
過酷な環境におけるエリア監視建設機械
建設機械
4 - 5
農業用車輌に最適な自動化ソリューション農業/林業用車輌
農業/林
業用車輌
6 - 7
屋外スペースとゲートのエリア監視運送/ロジスティック
運送/ロ
ジスティック
屋外
スペース
および
ゲート
8 - 9
港湾区域のエリア監視と自動化ソリューション運送/ロジスティック運
送/ロ
ジス
ティック
港湾10 - 11
空港エリアにおける高さと距離の監視運送/ロジスティック
運送/ロ
ジス
ティ
ック
空港12 - 13
14 - 15技術データ

特許取得のテクノロジー:タイムオブフライト方式(PMD)を採用しているため、たった1つのイメージを捉えるだけで背景と物体の3次元による検出が可能です。動作のブレはありません。
長距離の監視が可能:3Dセンサーは長距離用に最適化が施されているため最大35mまでの距離にある動く物体も検出します。
評価機能を内蔵:全ての3D計算はセンサー内部で行われ、結果はCANバスやFast Ethernet接続を介して伝送されます。
簡単で便利:取扱いが簡単なWindows用ソフトウエア“ifm vision assistant”でシステムのパラメータ設定をします。車輌への組込みでは、ソフトウェアCODESYSのファンクションブロックが利用可能です。
建設機械
4
衝突の予測
内蔵の自動物体認識機能で建設機械の走行路上にあ
る静止体または動く物体を最大20個まで検出します。
制動距離等の現在の速度, 走行方向, 定義したパラメ
ータを比較することで3Dセンサーは衝突の可能性
を計算し、CANバスまたはEthernetを通して車輌
制御システムにデータを伝送し、オペレーターにそ
の可能性を報らせます。
走行路上の監視
車輌の基準ポイントは任意で設定可能です。例えば、地面から予め定義された高さの障害物のみ、実際の障害物として検出することが可能です。

過酷な環境下におけるエリア監視
5
建設機械
農業/林
業用車輌
運送/ロ
ジスティック
屋外
スペース
および
ゲート
運送/ロ
ジス
ティック
港湾
運送/ロ
ジス
ティ
ック
空港
距離の監視
簡単な距離機能には内蔵の距離監視機能があります。
この機能では最大64個まで対象エリア(ROIs)を監
視できます。対象エリアとは距離の監視を行うエリ
アを指します。後方エリアの監視の実現が可能で、
自動化やアシスト面での課題を解決します。

過酷な環境に適応:センサーは可動部品がないため、摩耗は基本的にありません。また、-40~85°Cの使用周囲温度範囲を備えているので、汎用的に使用可能です。
外乱光に対する耐性:PMDテクノロジーを採用しているため、外乱光や直射日光がある難しい条件でも、優れた繰返し精度で測定データを提供します。
優れた通信能力:CAN(J1939プロトコル), CANopen,Fast Ethernet等のインターフェースを標準装備しています。センサーからシステム用赤外線照明ユニットまで自己診断機能によりシステムの状態を常時監視します。
素早く確実:自動車産業向けに高度に発達したアルゴリズムと最大50fpsのフレームレートを備えているため、センサーは3Dデータを素早く確実に算出することが可能です。
6
農業/林業用車輌
植物の認識
3Dセンサーは刈って寄せ集められた植物の列を認識し、自動操縦用データを車輌制御システムに伝送します。

7
農業用車輌に最適な自動化ソリューション
エッジの認識
堅牢な3Dセンサーは、1,000以上の測定ポイント
により刈り込みを行う植物のエッジを認識します。
そのため効率的な刈り入れプロセスのための正確で
安定した誘導が可能です。自動操縦の実装およびド
ライバーの負担軽減のために、センサーは全ての関
連データを車輌制御システムへ供給します。
建設機械
農業/林
業用車輌
運送/ロ
ジスティック
屋外
スペース
および
ゲート
運送/ロ
ジス
ティック
港湾
運送/ロ
ジス
ティ
ック
空港
走行ラインの誘導
線形の輪郭を総合的に認識する高度に発達したアル
ゴリズムは、認識した走行ラインを選択することに
より車輌のドライバーを誘導します。輪郭が途中で
切れている場合は、データが付け加えられます。そ
のため、僅かに中断されている場合は停止の誘導は
ありません。オフセット機能では車輌と誘導用走行
ライン間の微調整が可能です。
葡萄用ハーベスタ
ドライバーの負担を軽減するために3Dセンサーは葡萄の木の列に沿って自動操縦するための全ての関連データを車輌制御システムに伝送します。
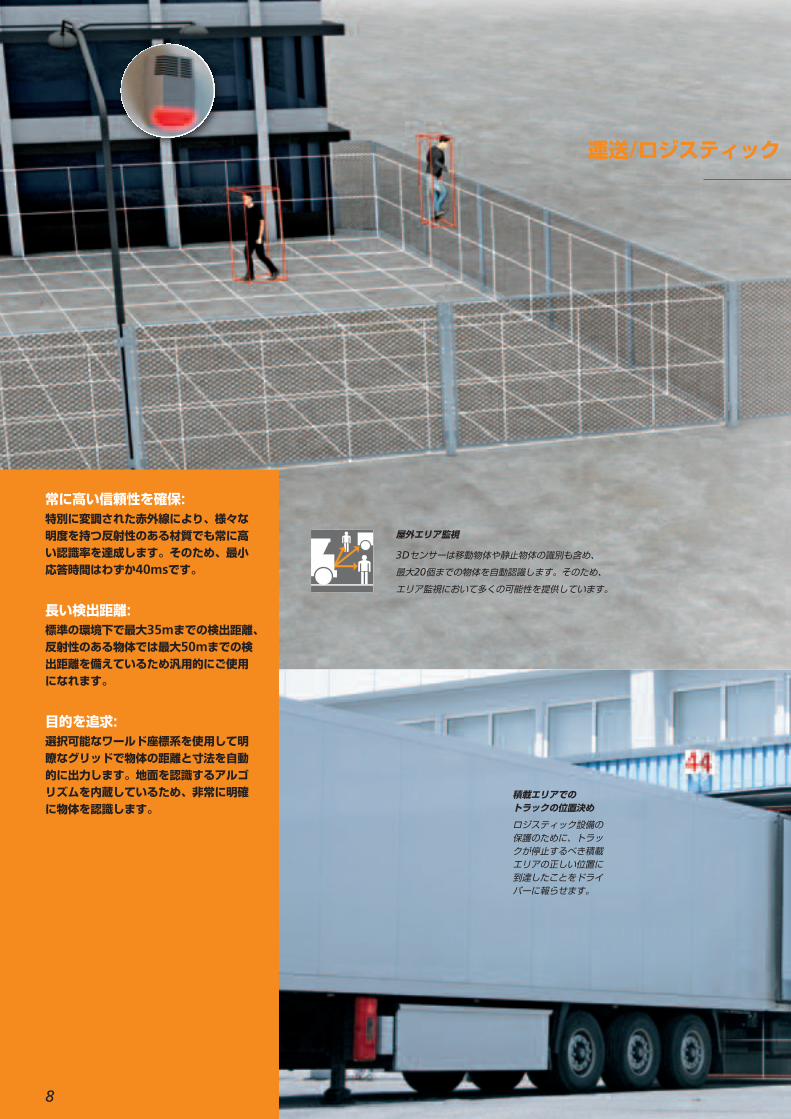
常に高い信頼性を確保:特別に変調された赤外線により、様々な明度を持つ反射性のある材質でも常に高い認識率を達成します。そのため、最小応答時間はわずか40msです。
長い検出距離:標準の環境下で最大35mまでの検出距離、反射性のある物体では最大50mまでの検出距離を備えているため汎用的にご使用になれます。
目的を追求:選択可能なワールド座標系を使用して明瞭なグリッドで物体の距離と寸法を自動的に出力します。地面を認識するアルゴリズムを内蔵しているため、非常に明確に物体を認識します。
運送/ロジスティック
積載エリアでのトラックの位置決め
ロジスティック設備の保護のために、トラックが停止するべき積載エリアの正しい位置に到達したことをドライバーに報らせます。
8
屋外エリア監視
3Dセンサーは移動物体や静止物体の識別も含め、
最大20個までの物体を自動認識します。そのため、
エリア監視において多くの可能性を提供しています。

屋外スペースとゲートのエリア監視
運送用車輌の位置決め
簡単な位置決めには、内蔵の距離監視機能がありま
す。この機能では最大64個まで対象エリア(ROIs)
を監視できます。対象エリアとは距離の監視を行う
エリアを指します。これにより例えば積載エリアに
設置したカメラ下方における運送用車輌の位置決め
が可能です。
建設機械
農業/林
業用車輌
運送/ロ
ジスティック
屋外
スペース
および
ゲート
運送/ロ
ジス
ティック
港湾
運送/ロ
ジス
ティ
ック
空港
9
0m
5m
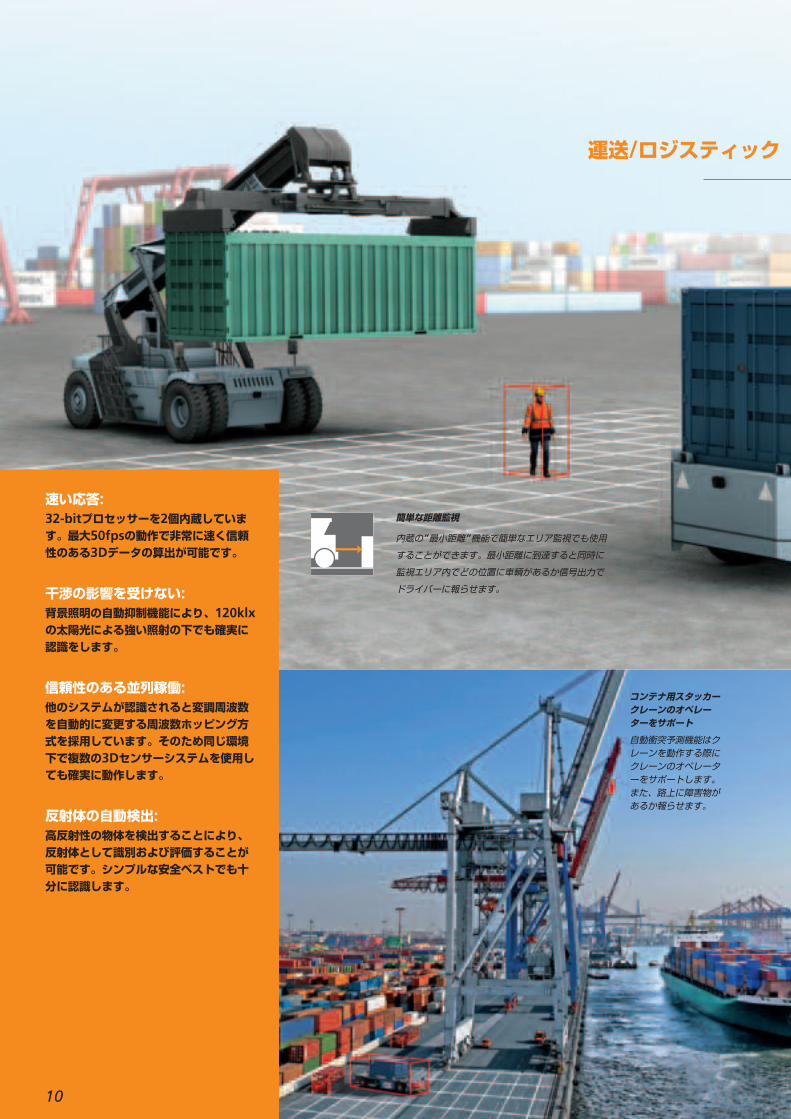
速い応答:32-bitプロセッサーを2個内蔵しています。最大50fpsの動作で非常に速く信頼性のある3Dデータの算出が可能です。
干渉の影響を受けない:背景照明の自動抑制機能により、120klxの太陽光による強い照射の下でも確実に認識をします。
信頼性のある並列稼働:他のシステムが認識されると変調周波数を自動的に変更する周波数ホッピング方式を採用しています。そのため同じ環境下で複数の3Dセンサーシステムを使用しても確実に動作します。
反射体の自動検出:高反射性の物体を検出することにより、反射体として識別および評価することが可能です。シンプルな安全ベストでも十分に認識します。
運送/ロジスティック
コンテナ用スタッカークレーンのオペレーターをサポート
自動衝突予測機能はクレーンを動作する際にクレーンのオペレーターをサポートします。また、路上に障害物があるか報らせます。
簡単な距離監視
内蔵の“最小距離“機能で簡単なエリア監視でも使用
することができます。最小距離に到達すると同時に
監視エリア内でどの位置に車輌があるか信号出力で
ドライバーに報らせます。
10

港湾区域のエリア監視と自動化ソリューション
衝突予測機能による自動走行車輌の追尾
前方車輌の自動追尾では、反射性物体の識別を使用
しています。自動車産業で高度に発達した実証済み
のアルゴリズムは信頼性があります。
例えば様々なパラメータを通して車輌前方の最小/最
大距離を設定したり、反射体の特定の配置状態だけ
を認識することができます。衝突予測機能を追加す
ることで障害物を確実に検出し、車輌制御システム
に2段階で信号を伝送することが可能です。直射日
光の照射や他の3Dセンサーシステムによる干渉は
抑制されます。
建設機械
農業/林
業用車輌
運送/ロ
ジスティック
野外エリア
および
ゲート
運送/ロ
ジス
ティック
港湾
運送/ロ
ジス
ティ
ック
空港
11

高性能な測定システム特許を取得したPMDテクノロジーを採用しているため、多様な反射特性を持つ材質でも測定データの優れた繰返し精度を確保することが可能です。多面的な測定システムは、埃塵や霧の発生による干渉も検出します。
堅牢なセンサー:保護構造IP 67およびIP 69Kと広い温度範囲-40~85°Cを備えているため、難しいアプリケーションでも汎用的にご使用になれます。
高い信頼性:3Dセンサーはセンサーから赤外線照明ユニットまでの自己診断機能を内蔵しています。これにより現在の機能ステータスに関する車輌制御システムの包括的な情報を常に供給することが可能です。センサーシステムにダメージ, 障害, 酷い汚れがある場合は、その信号を時間内で出力します。
運送/ロジスティック
タンカーの高さ監視
内蔵の距離機能“最小距離“では、最大64個まで選択可能な測定ポイントでタンカー上方を監視することができます。例えばタンカーが飛行機の翼の下に位置する時ドライバーをサポー
12
トし、翼が下に傾斜するとドライバーにそれを報らせます。

空港エリアで高さと距離の監視
簡単な距離監視
内蔵の“最小距離“機能は簡単なエリア監視に使用す
ることができます。
最小距離に到達すると同時に監視エリア内でどの位
置に車輌があるか信号出力でドライバーに報らせま
す。
建設機械
農業/林
業用車輌
運送/ロ
ジスティック
屋外
スペース
および
ゲート
運送/ロ
ジス
ティック
港湾
運送/ロ
ジス
ティ
ック
空港
13
航空機牽引車をアシスト
予め定義したエリアを監視することで、3Dセンサーは位置決め用信号または前輪の輪郭イメージを車輌用制御システムに伝送することが可能です。
搬送用車輌の位置決めをサポート
1,000以上の各測定ポイントにより搬送用車輌の環境を正確に検出します。64個全ての"対象エリア"(ROIs)を使用することで、ユーザー仕様のアプリケーションに対するソリューションが素早く簡単
に実現します。ここでは各対象エリアの距離を監視することです。

3Dセンサー O3M技術データ
14
PMD 3Dセンサー コードNo.
車載用3Dスマートセンサー O3M151
アクセサリー コードNo.
赤外線照明ユニット(850mm) 3DセンサーO3M用 O3M950
CAN/RS232-USBインターフェース EC2112
プログラミングケーブルセット CANfox用 EC2114
画像センサー用パラメータ設定ソフト E3D300
U型固定金具, センサーまたは照明ユニット用 E3M100
取付けセット 固定用金具Ø14mm, ステンレス E3M103
コネクター コードNo.
MCI接続ケーブルセンサー/照明ユニット接続用
Ethernet, クロスオーバーパッチケーブルPVCケーブル, M12/RJ45
E3M121
M12ソケット, 電源供給 照明ユニット用,PURケーブル, 4ピン
E3M122
E3M131
E3M132
E11898
E12204
長さ[m]
1
2
2
5
2
E3M123
E3M133
E12205
3
10
20
10
技術データ
センサーのタイプ
ピクセル分解能 [Pixel]
視野角度(水平 x 垂直) [°]
照明
PMD 3Dチップ
64 x 16
70 x 23
外部照明ユニット必要
最大フレームレート [Hz] 25 / 33 / 50
接続 M12コネクター
保護構造, 保護クラス IP 67 / IP 69K, III
使用電源電圧範囲 [V] DC 9~32
使用周囲温度 [°C] -40~85

21.01 x 6.16
www.ifm.com/jp/o3m
テクニカルデータ, アプリケーションビデオなどその他の情報はこちらまで
Overview 設定距離/視野サイズ
15
動作距離 [m]3 5 10 25 35
4.2x1.247 x 2.05
14 x 4.11
15
35.01 x 10.27
49.01 x 14.37
視野サイズ [m]

Visit our website:
www.ifm.com/jp
Position sensors
Sensors for motion control
Industrial imaging
Safety technology
Process sensors
Condition monitoringsystems
Industrial communication
Identification systems
Systems for mobile machines
Connection technology
Overviewifm product range:
Accessories
ifm article no. 780
0129
9J · 製品改良
のため、
記載事項
を予告なしに
変更する
場合
があ
りま
す。
·11/14
世界中に70以上の拠点 –ホームページ: www.ifm.com/jp
〒261-7118千葉県千葉市美浜区中瀬2-6-1WBG マリブウエスト 18FTel. 043 299 2080Fax 043 299 2078サービスセンター 0120 78 2070E-mail: [email protected]
東京営業所 043 299 2070首都圏営業所 043 299 2070名古屋営業所 052 776 5666大阪営業所 06 6615 3131広島営業所 082 567 2131九州営業所 092 474 7382東金物流センター 0475 50 3007


















