
3 자유도 운동판 설계를 위한 S imulation T ool A Dev elopment of S ... · 기호 정의...
57
工學碩士學位 請求論文 3 자유도 운동판 설계를 위한 Simulation Tool 개발 A Development of Simulation Tool for a design of Three Axis Motion table 2001 年 2 月 仁荷大學校 大學院 航空工學科 宋 承 昱
Transcript of 3 자유도 운동판 설계를 위한 S imulation T ool A Dev elopment of S ... · 기호 정의...
工學 碩士學 位 請求 論文
3 자유도 운동판 설계를 위한 S im u lat ion T ool 개발
A D e v e lopm e nt of S im u lat ion T o ol
for a de s ig n of T hre e A x i s M ot ion t ab le
200 1年 2月
仁荷大學校 大學院
航空工學科
宋 承 昱
工學 碩士學 位 請求 論文
3 자유도 운동판 설계를 위한 S im u lat ion T ool 개발
A D e v e lopm e nt of S im u lat ion T o ol
for a de s ig n of T hre e A x i s M ot ion t ab le
200 1年 2月
指導敎授 朴 瑃 培
이 論文을 工學碩士學位 論文으로 提出함
仁荷大學校 大學院
航空工學科
宋 承 昱
이 論文을 宋承昱의 碩士學位 論文으로 認定함
200 1年 2月
主審 (印 )
副審 (印 )
委員 (印 )
초 록
3 자유도 운동판은 원하는 가상의 각운동을 구현하는 장치로써 HILS (Hardware-
In- the- Loop- Simulation) 시스템의 핵심 구성 요소이다.
본 논문은 무인 항공기 테스트를 위한 저가의 소형 HILS 시스템 구축 시 3 자유도 운동판
의 설계를 위해 필요한 기초자료를 제시한다. 3 자유도 비선형 시뮬레이션 프로그램을 이용
해 운동판의 비선형 운동 특성과 PD 제어기의 이득 변화에 따른 시스템 응답 특성을 확인하
고, 설계변수의 변화가 운동판의 운동 특성에 미치는 영향을 분석한다.
이를 위해, 운동판을 구성하는 세 개의 운동판과 이를 구동하는 직류 모터, 그리고 회전 속
도와 토크를 제한하고 테이블과 모터를 연결하는 기어에 대한 운동방정식을 유도하였다.
세 구성 요소에 대한 방정식을 결합하여 비선형 토크 운동 방정식을 유도하였고, 정상상태
조건에 대해 미소 교란(Small perturbation)을 사용하여 선형화를 수행하였다.
롤, 피치, 요 각속도에 대한 요구사항을 설정하고, 시범적으로 3축 운동판을 설계한 후, 각
축에 대해 PD 제어기를 설계하였다. 설계된 PD 제어기를 비선형 시뮬레이션 프로그램에 적
용하여, 선형 PD 제어기의 적용 가능성을 확인하였다.
- I -
A B S T RA CT
T hree axis Motion- T able is one of the most important elements of HILS
(Hardware- in- the- loop- simulation ) as a device to simulate angular motions .
T his research paper offers fundamental informations which play a crucial role in
designing a three axis motion- table for the construction of HILS to test UAVs.
With the aid of T hree D.O.F Nonlinear Simulation Program, the dynamic
characteristics of Motion- T able and characteristic responses to gain changes of
PD- Controllers are identified and the effect s of mechanism by the changes of
design parameter s are analyzed.
In order to make it happen, dynamic equations for 3 dynamic tables, DC motor ,
and Gear which controls rotational velocity and torque and connects tables and
motors are introduced.
Nonlinear equations are introduced by integrating equations for the three elements
and the linearization of steady - state condition is enabled by using small
perturbation theory .
T he requirements for roll, pitch and yaw angular velocity are set and
PD- Controllers for each axis are designed after tentatively modelling T hree axis
Motion- T able.
By applying the designed PD- Controller s to the nonlinear simulation program, the
possibility of application of PD- controller is tested.
- II -

목 차
초 록 ⅰ
ABST RACT ⅱ
목 차 ⅲ
그림 목차 ⅴ
표 목차 ⅵ
기호 정의 (Nomenclature) ⅶ
1. 서론 1
2 . 시스 템 구 성 3
3 . 모델 링 5
3.1 모터의 운동 방정식 5
3.2 기어 효과 9
3.3 3 자유도 운동판의 운동 방정식 11
3.3.1 가정 11
3.3.2 좌표계 11
3.3.3 기하학 관계식 13
3.3.4 운동판의 운동 방정식 14
1) 외부 짐발의 모멘트 관계식 15
2) 내부 짐발의 모멘트 관계식 15
3) 내측 운동판의 모멘트 관계식 16
3.3.5 탑재체 각속도와 모터 회전 각속도의 관계 17
3.3.6 모터 축에 대한 모멘트 관계식 17
3.3.7 관계식 결합 22
4 . 선형 화 및 전달 함수 24
4.1 선형화 24
4.2 전달함수 26
4.3 설계예 27
- III -

5 . PD 제어 기 29
5.1 정착시간과 감쇠비 29
5.2 PD 제어기 설계 31
6 . 비선 형 시 뮬레 이션 33
7 . 시뮬 레이 션 결 과 및 검토 35
7.1 3 자유도 운동판의 운동특성 35
7.2 단위 계단 명령에 대한 응답 37
1) 롤 단위 계단 입력에 대한 응답 신호. 37
2) 피치 및 요 단위 계단 입력에 대한 응답 신호. 37
7.3 선회 운동 응답 38
8 . 결론 43
9 . 참고 문헌 44
감 사의 글 46
- IV -

그림 목차
<그림 1> HIlS 구성도 1
<그림 2> 3 자유도 운동판의 시스템 구성도 3
<그림 3> 3 자유도 운동 테이블의 기본 형상 4
<그림 4> 직류 모터의 등가 회로 5
<그림 5> 전기자 저항 측정 회로 6
<그림 6> SM - 3657 직류 모터의 회전수와 토크 관계 8
<그림 7> Gear와 모터 다발로 구성된 시스템 9
<그림 8> 내측 운동판 형상과 좌표계 11
<그림 9> 내부 짐발 형상과 좌표계 12
<그림 10> 외부 짐발 형상과 좌표계 12
<그림 11> 좌표계 변환 과정 13
<그림 12> PD 제어기를 포함한 제어 시스템의 블록선도 29
<그림 13> 내측 운동판의 rlocus 31
<그림 14> PD 제어기 포함시의 rlocus 31
<그림 15> 계단 함수 응답 그래프 32
<그림 16> 비선형 시뮬레이션 프로그램의 실행 화면 33
<그림 17> 3 자유도 운동판 시뮬레이션의 계산 흐름도 34
<그림 18> 요 운동에 따른 롤 자세 변화 35
<그림 19> 요 운동에 따른 피치 자세 변화 36
<그림 20> 롤 단위 계단 응답 37
<그림 21> 피치 및 요 단위 계단 응답 특성 37
<그림 22> 경사각 30도에서의 롤, 피치 자세 39
<그림 23> 경사각 30도에서의 요 자세와 오차 39
<그림 24> 경사각 45도에서의 롤, 피치 자세 40
<그림 25> 경사각 45도에서의 요 자세와 오차 40
<그림 26> 경사각 60도에서의 롤, 피치 자세 41
<그림 27> 경사각 60도에서의 요 자세와 오차 41
- V -
표 목차
<표 1> SM - 3657 직류 모터의 특성치 8
<표 2> 3 자유도 운동판의 관성 모멘트 27
<표 3> 3 자유도 운동판 구동을 위한 모터수 및 기어비 28
<표 4> KT - 1 무선조종 모형기의 최대 롤, 피치, 요 각속도 30
<표 5> 정착시간 요구사항 30
<표 6> 운동판의 PD 이득 및 운동 특성 32
<표 7> 3 자유도 운동판의 운동 특성 확인을 위한 시뮬레이션 초기값 35
<표 8> 수평 선회 명령 기준값 38
- VI -

기호 정의 (N om en c lature )
D ab : a 좌표계에서 b 좌표계로 변환하는 DCM 행렬
f : 기어 효과에서의 반작용 힘
G 1, 2 , 3 ( s) : 내측 운동판, 내부 짐발, 외부 짐발의 전달함수
H : 각 운동량
i a : 직류 모터 전기자 전류
I 1 : 내측 운동판의 관성 모멘트 행렬
I 2 : 내부 짐발의 관성 모멘트 행렬
I 3 : 외부 짐발의 관성 모멘트 행렬
J : 직류 모터의 관성 모멘트
K e : 유도 전압 상수 (역 기전력 상수)
K T : 토크 상수
K p : 비례 제어 게인
L a : 전기자 권선 인덕턴스
M : 모멘트
M dx : 내측 운동판의 모터 축에 작용하는 토크
M dy : 내부 짐발의 모터 축에 작용하는 토크
M dz : 외부 짐발의 모터 축에 작용하는 토크
M p : 최대 초과량
N : 모터 개수
r : 모터 측 기어의 반지름
R : 운동판 측 기어의 반지름
R a : 직류 모터 내부 저항
T : 토크
T d : 미분 시간
t s : 정착 시간
v a : 직류 모터 인가 전압
- VII -
v b : 직류 모터 유도 전압
: 감쇠비
, , : 롤, 피치, 요 자세각
: 직류 모터 공극 자속
: 모터 축의 회전 각속도
1 : 내측 운동판의 각속도
2 : 내부 짐발의 각속도
3 : 외부 짐발의 각속도
- VIII -

1 . 서론
연구용 비행 시뮬레이터는 풍동, 구조 및 추진 기관 시험설비와 더불어 항공기 설계기술 개
발의 중요한 기본 도구로서 항공기 개발 초기 단계에서 필요한 항공기의 비행성능 예측, 조
종석 설계, 항공기 종합 시스템 평가 및 비행제어시스템의 개발 등 다양한 분야에 응용된다.
연구용 비행 시뮬레이터를 통해 평가된 항공기의 성능은 개발항공기의 성능향상에 핵심인자
가 되는 비행제어시스템 설계의 기초자료로서 활용될 수 있고, 비행제어시스템의 개발시에는
비행 시뮬레이터를 사용한 HILS (Hardware- in- the- loop- simulation ) 테스트를 통하여
비행제어시스템의 소프트웨어 및 하드웨어의 성능 및 기능 평가를 수행할 수 있다[1].
설계된 비행제어시스템의 성능 및 기능 평가는 실제 항공기에 탑재하여 수행하여야 하지만
항공기 비행시험시 소요되는 시간과 경비 및 비행중에 발생할 수 있는 위험 요소를 고려할
때, 지상에서 HILS 테스트를 통하여 미리 제어시스템의 성능을 평가하여 검증하며 문제점이
발견될 경우 이를 완전히 해결한 후 실제 항공기에 적용하는 것이 바람직하다.
HILS 테스트는 비행시험의 보조적인 방법으로 큰 효과를 볼 수 있으나 비행시험 자체를
대체할 수는 없다. 그러나 필요한 비행시험 횟수를 줄이고 비행시험시의 위험도를 상당히 낮
출 수 있고, HILS의 기본 구성은 <그림 1>과 같다.
<그림 1> HIlS 구성도
3 자유도 운동판은 HILS 시스템에서 실 운동을 모사하기 위해 필수적인 요소이다. 이를 설
계, 제작, 개발하기 위해서는 작동기인 모터와 자이로 운동 및 기구학에 대한 이해가 필요하
- 1 -

다.
운동판 설계는 주어진 탑재물의 관성 모멘트에 대해 회전 각속도로 정해지는 요구사항을
만족하는 적절한 크기의 테스트 table과 이를 구동하는 모터의 토크를 결정하여야 한다. 그
러나 단일 축 이상의 회전축이 설계될 경우, 각 축간의 간섭과 비선형성으로 인해 여분의 토
크가 필요하며, 제어 요구사항을 만족시켜야 할 경우, 여유 토크 이외에 운동 방정식 유도를
통한 시뮬레이션으로 그 결과를 확인해야 한다.
그러나 국내에는 이러한 문제에 대한 논의 및 경험이 부족하고, 국외의 경우 오래전부터 연
구되어온 분야이긴 하지만 그에 대한 정보를 구하기가 어려운 실정이다.
모터 제어 분야에서 연구되어온 내용은 대개 단일 축에 대한 제어기 설계와 모터 자체의 성
능 향상에 대한 내용만이 있을 뿐, 운동판 개발시 필요한 운동 특성 및 3 자유도의 운동판에
대한 제어기 설계는 전무하다[2].
따라서 본 논문은 3 자유도 운동판 설계를 위해 형상 및 제어 이득 변화에 따른 운동판의
운동 특성을 시뮬레이션하고, 제어 가능성을 확인할 수 있는 시뮬레이션 프로그램을 제작하
여 운동판 설계를 위한 제작 도구를 제시하는데 그 목적이 있다.
이를 위해 우선 직류 모터의 특성 방정식을 유도하고, 주어진 모터의 운동 특성을 지시하는
인자를 유추하였다. 그리고, 기어(gear ) 효과를 수식화하였으며, 3 자유도 운동판의 운동방정
식 및 운동학적 관계식을 정리하였다.
이 세 식을 결합하여, 비선형의 3 자유도 운동판 방정식을 유도하였고, 주어진 제어 요구사
항을 만족하는 제어기 설계를 위해 수평 비행 상태를 나타내는 정상상태에 대해 선형화를 수
행하였다.
운동판의 제어는 각 축에 대해 PD 제어기를 설계하고, 각각에 대한 단위 계단 응답 특성을
이용하여 판단하였다. 이를 세 개의 축이 연동될 경우 비선형성과 간섭에 의해 일어나는 영
향을 분석하기 위해 비선형 시뮬레이션을 수행하였다.
2장에서는 본 논문에서 다루는 3 자유도 운동판 시스템의 구성과 기초 형상에 대해 논의하
고, 3장에서는 운동판 시스템을 구성하는 직류 모터, 기어, 운동판의 수학적 모델링을 수행하
였다. 4장에서는 3장에서 구한 비선형 방정식을 선형화하고, 제어 입력에 대한 각 운동판의
자세의 전달함수를 구하였고, 5장에서 PD 제어기의 설계과정과 이득에 대한 응답 특성을 확
인하였다. 6장에서 본 논문을 통해 작성한 셀계 도구인 비선형 시뮬레이션 프로그램을 설명
하고, 7장에서 본 프로그램의 성능을 분석하였다.
- 2 -
2 . 시스템 구성
3 자유도 운동판은 롤, 피치, 요 운동을 시뮬레이션하기 위해 3개의 운동판으로 구성된다.
이들 각 운동판은 탑재물이 설치되고 형상을 지지하는 운동판과 이들을 구동하는 여러 개의
직류모터 그리고 직류모터의 토크와 회전속도를 운동판 구동을 위한 양으로 사용하기위해
연결자로 사용되는 기어로 이루어진다.
각 축에 대한 자세를 제어하기 위해 상태 궤환 제어 신호로써 시간에 따른 운동판 자세각을
검출하는 리졸버(resolver )를 사용하기로 한다.
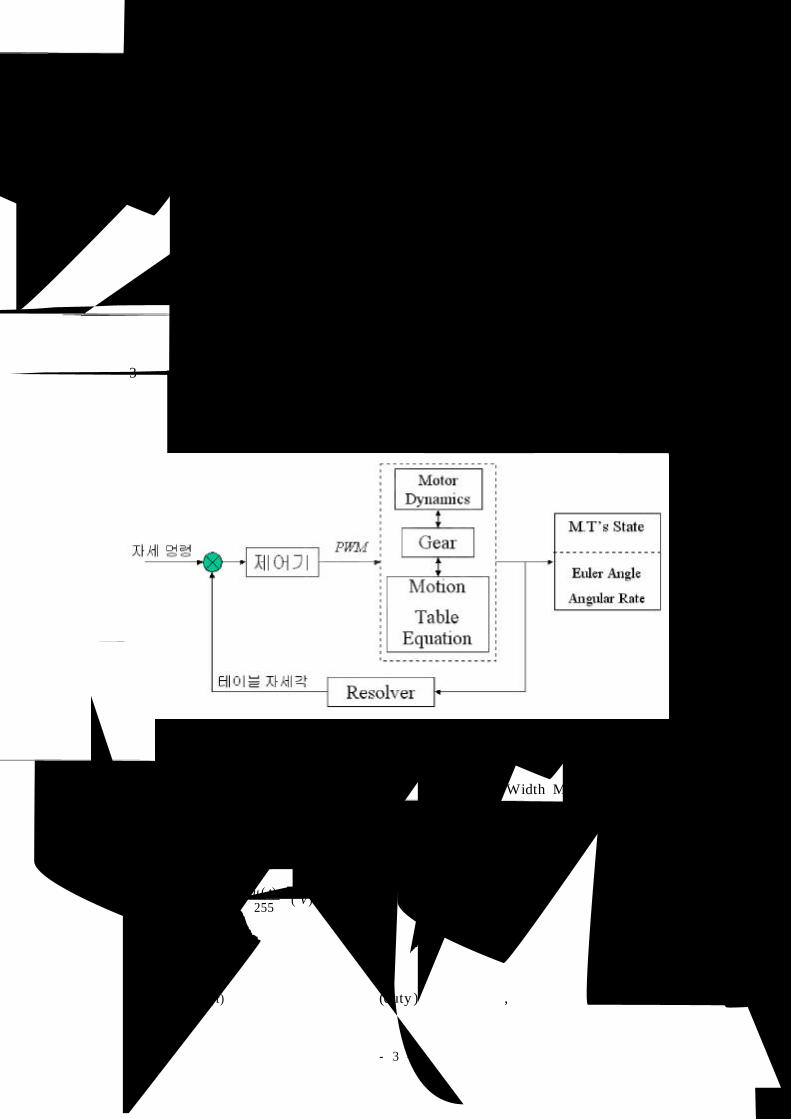
3 자유도 운동 테이블은 각 축에 대해 위 구성요소를 연결하여 구동되고, 시스템 구성도는
다음과 같다.
운동판의 제어는 8 bit의 분해능을 가지는 펄스폭변조(Pulse Width Modulation, PWM)
신호를 이용하므로, 제어기에 의해 구해진 제어입력은 ±255의 범위로 제한되고, 직류 모터
의 등가인가전압은 아래의 식을 만족하면서 직류 모터에 입력 전압으로 주어진다[3].
v a = 24 u ( t)255
( V) (1)
여기서, v a는 직류모터의 인가전압이다.
위 식에서 u ( t)는 제어 입력으로써 듀티(duty )비를 나타내고, 양수와 음수는 모터의 회전
<그림 2> 3 자유도 운동판의 시스템 구성도
- 3 -

방향을 지시한다. 즉, 음수는 역방향 회전을 의미한다.
이렇게 주어진 직류 전압으로 토크를 발생시켜, 운동판을 구동하게 된다.
그리고, 본 논문에서 사용하는 3 자유도 운동판의 형상은 <그림 3>을 따르도록 한다[4].
< 그림 3> 3 자유도 운동 테이블의 기본 형상
<그림 3>에서 제시한 기본 형상은 한국항공우주연구소와 국방과학연구소에서 운용중인 운
동 테이블과 유사한 형상으로써, 3 자유도 운동판은 내측 운동판, 내부 짐발, 외부 짐발로 구
성되고, 각 테이블은 롤, 피치, 요 자세를 결정한다.
- 4 -

3 . 모델링
3 자유도 운동 테이블은 운동판, 직류모터, 기어로 이루어진다. 제어기 설계 및 비선형 시뮬
레이션을 수행하기 위해서는 각 요소에 대한 수학적 모델링이 이루어져야 한다. 운동 테이블
은 세 개의 모터 회전축에 대해 운동이 일어남으로, 각 테이블에 정의된 모멘트 식을 결합하
여 세 개의 모멘트 관계식으로 유도하고, 이에 대해 제어기를 설계해야 한다.
3 .1 모 터의 운동 방정 식
모터가 전원과 연결되어 있는 경우 <그림 4>와 같이 등가회로를 구성할 수 있다[5].
아래 등가회로의 경우, 직류 서보모터를 선형적으로 해석하기 위해서 모터에 의해 발생한
토크는 전기자 전류에 비례하고, 공극자속 Φ는 계자 전류에 비례한다고 가정한 것이다.
즉, 계자 전류와 전기자 전류가 서로 독립적인 분권 모터를 기준으로 모델링하였다.
<그림 4> 직류 모터의 등가 회로
위 그림에서 v a는 직류 모터에 대한 인가 전압, L a는 전기자 권선의 인덕턴스, R a는 내부
저항, v b는 모터가 회전중에 발생하는 유도 전압을 나타낸다.
위 회로를 흐르는 전류를 i a라고 할 경우 다음의 식이 성립한다.
v a = L a
d i a
dt+ R a i a + v b (2)
여기서 유도전압 v b에 대한 관계식은 다음과 같다.
v b = K e m (3)
- 5 -

여기서 K e는 유도 전압 상수(역기전력 상수)로써 단위는 [ V s ec / rad ] 이고, m은 모
터 회전축의 각속도이다.
또한 모터에서 발생하는 토크는 다음과 같다.
T = i a K T (4)
여기서, T 는 모터의 발생 토크이며 모터밖으로 꺼낼 수 있는 토크와 모터의 내부에서 소비
되는 토크의 합이고, K T는 토크 상수로써 [ N m / A ]의 단위를 가진다.
그리고 토크에 대한 평형식을 구하면 다음과 같다.
Jd m
dt= K T i a - T L (5)
여기서 J는 모터와 부하의 합성 관성 모멘트이고, T L 는 부하의 반항 토크이다.
직류 모터의 동작 특성을 나타내는 특성인자는 실험과 정상 상태 값과 함께 시뮬레이션을
통해 아래의 회전수에 대한 토크 관계 그래프를 이용하여 구하게 된다[6].
식 (2)에서 만약 모터의 회전축을 고정시켰을 경우, 정상상태에서의 운동을 구하면, 즉
m = 0 ,di a
dt= 0 이면 전압 관계식은 다음과 같다.
v a = R a i a , R a =v a
i a(6)
직류 모터의 전기자 저항 측정을 위해 다음과 같이 회로를 구성한다.
< 그림 5 > 전기자 저항 측정 회로
- 6 -

위와 같이 회로를 구성한 경우, 이 회로를 흐르는 전류를 i 라 할 때, 저항 R 1에 걸리는 전
압을 v 1이라고 하자.
이때 본 회로를 흐르는 전류 i a는 다음과 같다.
i a =v a
R 1 + R a(7)
그리고 저항 R 1에 걸리는 전압 v 1는 다음 식을 만족한다.
v 1 = i a R 1 =R 1
R 1 + R av a (8)
따라서 전기자 저항 R a는 다음과 같다.
R a =v a - v 1
v 1R 1 (9)
인가 전압에 대해 모터가 정상 상태에 도달한 경우,d m
d t= 0 이므로, 식 (5)에서 토크
상수는 다음과 같다.
K T i a = T L (10)
위 식에서 T L 는 모터 축에 걸어주는 인가 토크로써 직류 모터 제원표의 x축을 이루는 값
이고, 이에 따라 전기자 전류 또한 구할 수 있다. 두 변수의 관계에서 그 기울기가 토크상수
이다.
무부하 조건에서 모터가 정상상태에 도달한 경우 다음 조건을 만족한다.
d i a
d t= 0 , T L = 0 (11)
위 조건에 의해 전압 관계식은 다음과 같이 정리할 수 있다.
v a = R a i a + K e m (12)
- 7 -

따라서 역 기전력 상수는 다음과 같다.
K e =v a - R a i a
m(13)
직류 모터의 제원표를 위 식에 대입해서 역 기전력 상수를 구할 수 있다.
모터의 R, L 측정과 함께 시뮬레이션에 의해 SM- 3657 직류 모터의 특성 그래프를 만족하
는 관련 계수를 구한 결과는 다음과 같다.
<표 1> SM - 3657 직류 모터의 특성치
특성인자 정의 값 단위
L a 인덕턴스 3.34 m H
R a 저항 3.3 Ω
K T 토크 상수 0.0245 N m / A
K e 역기전력 상수 0.03786 V s ec / rad
J 관성 모멘트 0.00001 K g m 2
<그림 6> SM - 3657 직류 모터의 회전수와 토크 관계
- 8 -

3 .2 기 어 효 과
많은 전기 구동장치의 응용은 상대적으로 느린 운동과 고 토크를 요구한다. 예를 들면 견인
이나 로봇을 움직일 때, 모터의 정격 토크를 나타내는 로터 표면적당 접선 방향의 힘은 도체
의 열손실과 철포하로 제한되기 때문에 고속으로 모터를 작동하고 따라서 파워 밀도를 더 증
가시켜야할 때 자주 기어를 사용한다.
일반적으로, 모터와 기어의 연결시 백래쉬(Backlash) 효과가 발생하지만, 본 논문의 운동판
은 기어에 대해 다수의 모터가 연결되는 구조이고, 각 모터가 적절한 시간차이를 가지고 제
어될 경우, 백래쉬 효과를 무시할 수 있다.
기어에는 마찰, 백래쉬, 미끄러짐이 없다고 가정하고, 다음과 같이 다수의 동일한 모터가 하
나의 중앙 기어 주위에 분포하는 <그림 7>에 대한 관계식은 다음과 같다[7].
이때 동일한 다수의 SM- 3657 직류 모터를 이용하므로, 소형기어의 반지름과 관성 모멘트
는 모두 동일하다고 가정한다.
< 그림 7> Gear와 모터 다발로 구성된 시스템
N개의 모터가 연결된 경우, i- 번째 모터에 의해 기어에 작용하는 토크를 T i라 할 때, i번째
모터측 기어에 대한 토크 관계식은 다음과 같다.
J i
d i
d t= T i - r if i (14)
- 9 -

여기서, J i는 i 번째 모터의 관성 모멘트이고, i는 i 모터축의 회전 각속도, T i는 직류 모
터에 의한 토크, r i는 i 번째 기어의 반경, f i는 i 번째 기어에 작용하는 반작용 힘이다.
중앙 기어의 경우 소형 모터측 기어와 연결되어 있으므로 각각에 의한 반작용 힘이 합해져
영향을 끼치므로 운동판에 연결된 중앙 기어에 대한 토크 관계식을 구하면 다음과 같다.
JMdd t
+ T M =N
i = 1R f i (15)
여기서, J M은 운동판을 포함한 중앙 기어 축상의 관성 모멘트이고, R은 중앙 기어의 반지
름, 그리고 T M 은 중앙 기어측에서 발생시키는 토크로써, 본 논문에서는 균형이 맞지 않았을
경우, 무게중심에 의해 발생한 모멘트이며, N은 모터의 개수이다.
위 식에서 각 소형 모터에 의해 작용하는 토크는 일정하고, 각 소형 기어의 반지름은 동일
하다. 그리고 접촉점에서의 힘이 평형하고 두 기어가 동시에 움직이므로 소형 기어와 중앙
기어 사이에 존재하는 반작용 힘은 일정하므로, 다음 관계를 만족한다.
T 1 = T 2 = = T N
r 1 = r 2 = = r N = r
f 1 = f 2 = = f N = f
(16)
그리고 마찰 및 백래쉬등의 영향을 무시할 경우, 각 소형 기어의 회전 각속도와 중앙 기어
의 회전 각속도는 다음의 관계를 가진다.
1 = 2 = = N =
r = R(17)
위 관계를 이용해 정리하면 다음과 같은 세 개의 기어효과에 의한 토크 관계식을 구할 수
있다.
Jddt
= T - r f
JMdd t
+ T M = R f N
r = R
(18)
- 10 -

3 .3 3 자유 도 운 동판 의 운 동 방 정식
3 자유도 운동판의 운동 방정식은 각속도 항에 대한 운동학 방정식(Kinematic Equation)
과 회전 토크 항에 대한 동력학 방정식(Dynamic Equation)으로 표현된다.
3 .3 .1 가정
3 자유도 운동판의 운동 방정식을 구하기 위해 다음과 같이 가정한다.
1) 운동판은 내측 운동판, 내부 짐발, 외부 짐발로 이루어져 있고, 운동판과 각 짐발들은
기준 좌표계에 대해 대칭으로써, 관성적(product of inertia)은 0이다. 즉, 관성 모멘트
행렬은 대각 행렬이다.
2) 운동판과 짐발들의 무게중심은 발란싱에 의해 각 테이블 좌표계의 원점에 위치한다고
가정한다. 즉, 무게중심의 위치에 따른 토크에서의 비선형성은 존재하지 않는다.
3 .3 .2 좌표계
3 자유도를 가지는 운동판에 대한 운동 방정식을 유도하기 위해선 적절한 좌표계를 정의해
야한다. 내측 운동판에 탑재되는 센서의 자세는 관성좌표계에 대해 정의된다. 그리고, 운동판
은 3개의 테이블로써 동작하고, 각 테이블은 개별 독립성을 가지고 회전함으로 각 테이블에
대해 개별 좌표계를 설정해야한다. 이들 세 개의 좌표계를 내측 운동판, 내부 짐발, 외부 짐
발 좌표계라 하고, 수식 전개를 쉽게 하기 위해 이후 내측 운동판, 내부 짐발, 외부 짐발 좌표
계를 각각 1, 2, 3 좌표계라고 한다. 각 테이블에 대한 좌표계는 다음과 같다.
< 그림 8> 내측 운동판 형상과 좌표계
- 11 -

<그림 9> 내부 짐발 형상과 좌표계
<그림 10> 외부 짐발 형상과 좌표계
내측 운동판 좌표계는 관성 좌표계로부터 다음의 순서로 변환될 수 있다.
1) 관성 좌표계를 Z I축을 중심으로 만큼 회전한 좌표계를 외부 짐발 좌표계라고 한다.
2) 외부 짐발 좌표계를 y 3 축에 대해 만큼 회전한 좌표계를 내부 짐발 좌표계라고 한다.
3) 내부 짐발 좌표계를 x 2 축에 대해 만큼 회전한 좌표계를 내측 운동판 좌표계라고 한
다.
- 12 -

이때의 좌표계 변환관계를 나타내는 Direction Cosine Matrix (DCM)는 다음과 같다.
D I3 =
cos s in 0- s in cos 0
0 0 1
D 32 =
cos 0 - s in0 1 0
s in 0 cos
D 21 =
1 0 00 cos s in0 - s in cos
(19)
여기서, D ab는 a 좌표계에서 b 좌표계로 변환하는 DCM이고, , , 는 관성 좌표계에 대
한 오일러 자세각이다.
위 관계를 도식적으로 나타내면 다음과 같다.
<그림 11> 좌표계 변환 과정
3 .3 .3 기하학 관계식
3 자유도 운동판의 기하학적 관계식은 내측 운동판 좌표계에 대한 각속도와 관성 좌표계에
대한 오일러 각의 미분항과의 관계를 나타낸다. 탑재체의 각속도 1는 내측 운동판 좌표계
- 13 -

에 대한 값이지만, 오일러 각의 미분항인 , , 는 서로 다른 좌표계의 성분들이 포함되어
있다. 즉, 는 외부 짐발 좌표계에 대한 값이고, 는 내부 짐발 좌표계에 대해 정의된 값이
고, 는 내측 운동판 좌표계에 대해 정의된 값이다.
따라서, 내측 운동판 좌표계에 대해 정의된 탑재체의 각속도 1와 오일러 변위각의 관계식
을 정리하면 다음과 같다.
1 =pqr
=1x
1y
1z
= 00
+ D 21
0
0+ D 2
1D32
00
=1 0 - s in0 cos s in cos0 - s in cos cos
(20)
여기서, p, q, r은 관성 좌표계에 대한 탑재체의 각속도이고, 1x , 1y , 1z 는 내측 운동판
의 각속도이며, , , 는 오일러 각의 변화율이다.
3 .3 .4 운동판의 운동 방 정식
3 자유도 운동판은 오직 회전 운동만을 함으로 회전 각속도에 대한 모멘트 관계식만으로 그
운동을 표현할 수 있다. 외부 짐발, 내부 짐발, 내측 운동판으로 이루어져있고, 각 테이블에
대해 개별 좌표계가 정의되어 있으므로, 각 테이블에 대해 개별 모멘트 관계식을 구해야한다
[8].
미소질량 dm 에 대한 운동량은 그 미소질량이 고정 좌표계에 대하여 갖는 절대속도에 미소
질량을 곱한 값인데, 각 운동량은 이 운동량과 무게중심에서의 거리를 곱하는 것으로 정의된
다. 각운동량 H는 다음 식과 같이 전체 미소질량에 대해 적분하면 구해진다[9].
H = r ( r ) dm = I (21)
여기서, I는 관성모멘트 행렬이고, 는 각속도, r 은 무게중심으로 부터의 거리이다.
모멘트 방정식은 외부에서 가해지는 모멘트의 총합으로 각운동량의 시간적 변화율과 같은
데 관성능률과 각속도를 사용하여 다음과 같이 표현된다.
- 14 -

M = ddt |
IH = H + H (22)
1) 외부 짐발의 모멘트 관계식
외부 짐발은 의 각속도를 가지고 외부 짐발의 z축에 대해 회전한다. 따라서, 관성 좌표계
에 대한 외부 짐발의 회전 각속도는 다음과 같다.
3 =3x
3y
3z
=00 + D I
3
Ix
Iy
Iz
=00 (23)
여기서, 관성 좌표계는 회전하지 않으므로, I = 0 이다.
가정에서 각 테이블은 각 평면에 대해 대칭이므로, 관성 모멘트 행렬은 대각 행렬이다. 따라
서 각 운동량은 식 (21)에 의해 다음과 같다.
H 3 = I 3 3 =I 3x 0 00 I 3y 00 0 I 3z
3x
3y
3z
=I 3x 3x
I 3y 3y
I 3z 3z
=00
I 3z 3z
(24)
외부 짐발의 모멘트 관계식은 식 (22)에 의해 다음 식을 만족한다.
M 3 = H 3 + 3 H 3 (25)
위 각운동량 관계식인 식 (24)을 모멘트 관계식인 식 (25)에 대입하면, 외부 짐발에 작용하
는 모멘트는 다음과 같다.
M 3 = H 3 + 3 H 3 =00
I 3z 3z
+00
3z
00
I 3z 3z
=00
I 3z 3z
(26)
2) 내부 짐발의 모멘트 관계식
내부 짐발은 외부 짐발의 회전양만큼 회전하면서, 의 각속도를 가지고 내부 짐발의 y축에
대해 회전하므로, 관성 좌표계에 대한 내부 짐발의 회전 각속도는 다음과 같다.
- 15 -
2 =2x
2y
2z
=0
0+ D 3
2
3x
3y
3z
=0
0+
cos 0 - s in0 1 0
s in 0 cos
003z
=0
0+
- s in 3z
0cos 3z
(27)
그리고, 이에 따라 내부 짐발의 각운동량 및 모멘트 관계식은 다음과 같다.
H 2 = I 2 2 =I 2x 2x
I 2y 2y
I 2z 2z
=- s in I 2x 3z
I 2y
cos I 2z 3z
(28)
M 2 = H 2 + 2 H 2 =
I 2x 2x
I 2y 2y
I 2z 2z
+i j k
2x 2y 2z
I 2x 2x I 2y 2y I 2z 2z
=I 2x 2x
I 2y 2y
I 2z 2z
+( I 2z - I 2y ) 2y 2z
( I 2x - I 2z ) 2z 2x
( I 2y - I 2x ) 2x 2y
(29)
3) 내측 운동판의 모멘트 관계식
내측 운동판은 내부 짐발의 회전양 만큼 회전하면서, 의 각속도를 가지고 내측 운동판의
x축에 대해 회전하므로, 관성 좌표계에 대한 내측 운동판의 회전 각속도는 다음과 같다.
1 =1x
1y
1z
= 00
+ D 21
2x
2y
2z
= 00
+1 0 00 cos s in0 - s in cos
2x
2y
2z
= 00
+2x
cos 2y + s in 2z
- s in 2y + cos 2z
(30)
그리고, 위 각속도로 회전할 경우, 내측 운동판의 모멘트 관계식은 다음과 같다.
M 1 = H 1 + 1 H 1 =
I 1x 1x
I 1y 1y
I 1z 1z
+i j k
1x 1y 1z
I 1x 1x I 1y 1y I 1z 1z
=I 1x 1x
I 1y 1y
I 1z 1z
+( I 1z - I 1y ) 1y 1z
( I 1x - I 1z ) 1z 1x
( I 1y - I 1x ) 1x 1y
(31)
- 16 -

3 .3 .5 탑재체 각속도 와 모터 회전 각속도의 관 계
탑재체의 각속도를 라 할 경우, 이는 내측 운동판의 각속도와 일치한다.
=pqr
= 1 =1x
1y
1z
(32)
가동 토크가 세 개의 직류 모터에 의해 주어짐으로써, 이에 의한 각속도 성분과 탑재물의
각속도인 내측 운동판의 각속도에 대한 관계식이 구해져야한다.
각 모터는 각 좌표계에 대해 한 축에 고정되어 사용된다. 본 시스템에서는 기어의 영향을
무시할 경우, 모터 축과 일치하는 각속도 성분은 다음과 같다.
· 내측 운동판의 내측 운동판 모터 축방향 각속도 : 1x
· 내부 짐발의 내부 짐발 모터 축방향 각속도 : 2y
· 외부 짐발의 외부 짐발 모터 축방향 각속도 : 3z
위 세 개의 각속도가 변하고 이에 따라 내측 운동판의 자세가 결정됨으로, 이에 대한 관계
를 구해야 한다. 즉, ( 1x , 1y , 1z ) 와 ( 1x , 2y , 3z )의 관계식을 구하기 위해, 1y 와
1z 를 정리하면 다음과 같다.
1y = cos 2y + s in 2z = cos 2y + s in cos 3z
1z = - s in 2y + cos 2z = - s in 2y + cos cos 3z
(33)
따라서, 탑재체의 각속도와 각 모터회전축 방향의 테이블 각속도는 다음의 관계식을 만족한
다.
1x
1y
1z
=1 0 00 cos s in cos0 - s in cos cos
1x
2y
3z
(34)
3 .3 .6 모터 축에 대한 모멘 트 관계식
본 시스템에서 정의한 모멘트 식에 의하면 총 9개의 방정식이 구해진다. 이 식들을 이용하
- 17 -

여, 모터와의 연결에 의한 제어를 수행할 경우, 세 개의 모터축에 관한 식으로 변환되어야한
다. 내측 운동판에 의해 내부 짐발, 외부 짐발에 영향을 주게되고, 내부 짐발에 의해 외부 짐
발의 모멘트 값이 변하게 된다.
즉 내측 운동판에 의해 외부 운동판의 모터 회전축에 작용하는 토크가 변하게 된다.
우선, 내측 운동판의 모터 회전축에 대한 모멘트 관계식은 내측 운동판에 의한 토크만으로
구성된다. 이는 M 1에 대한 토크 관계식인 식 (31)에서 x 방향 성분으로써 다음과 같다.
I 1x 1x + 1y 1z ( I 1z - I 1y ) = M dx (35)
내부 짐발의 모터 회전축에 대한 모멘트 관계식은 내부 짐발에 대해 적용되는 모멘트 식
M 2에서의 y방향 성분과 함께 내측 운동판에 의한 영향 또한 포함한다.
내부 짐발에 의한 모멘트 M 2의 y방향 성분은 식 (29)의 y 방향 성분으로 다음과 같다.
M 2y = I 2y 2y + 2z 2x ( I 2x - I 2z ) (36)
내측 운동판에 의해 내부 짐발에 작용하는 모멘트 영향은 식 (19)과 식 (31)를 이용하여 정
리하면, 다음과 같다.
D 12M 1 =
1 0 00 cos - s in0 s in cos
I 1x 1x + 1y 1z ( I 1z - I 1y )
I 1y 1y + 1z 1x ( I 1x - I 1z )I 1z 1z + 1x 1y ( I 1y - I 1x )
(37)
=I 1x 1x + 1y 1z ( I 1z - I 1y )
cos {I 1y 1y + 1z 1x ( I 1x - I 1z ) } - s in {I 1z 1z + 1x 1y ( I 1y - I 1x ) }s in {I 1y 1y + 1z 1x ( I 1x - I 1z ) }+ cos {I 1z 1z + 1x 1y ( I 1y - I 1x ) }
여기서, y 방향 성분만이 내부 짐발의 모터 축에 작용하므로 내부 짐발의 모터 회전축에 작
용하는 총 모멘트는 다음과 같다.
M dy = I 2y 2y + 2z 2y ( I 2x - I 2z ) + cos {I 1y 1y + 1z 1x ( I 1x - I 1z ) }
- s in {I 1z 1z + 1x 1y ( I 1y - I 1x ) }(38)
외부 짐발에 대한 모멘트 관계식은 내측 운동판과 내부 짐발에 의한 영향을 포함한다.
- 18 -

우선, 외부 짐발의 모멘트 식에서의 z방향 성분은 식 (26)에서 z 방향 성분으로 다음과 같
다.
M 3z = I 3z 3z (39)
그리고, 내부 짐발에 의한 영향은 내부 짐발 좌표계에 대해 유도한 M 2를 외부 짐발 좌표계
에 대해 변환함으로써 구할 수 있다.
D 23M 2 =
cos 0 s in0 1 0
- s in 0 cos
I 2x 2x + ( I 2z - I 2y ) 2y 2z
I 2y 2y + ( I 2x - I 2z ) 2z 2x
I 2z 2z + ( I 2y - I 2x ) 2x 2y
(40)
위 식을 정리하고, z 방향 성분만을 구하면 다음과 같다.
M 23 = - s in I 2x 2x - ( I 2z - I 2y ) 2y 2z s in + cos I 2z 2z + cos ( I 2y - I 2x ) 2x 2y (41)
내측 운동판에 의한 영향은 위와 같은 방법으로 구하면 다음과 같은 관계를 가진다.
D 23D 1
2M 1 =cos 0 s in
0 1 0- s in 0 cos
1 0 00 cos - s in0 s in cos
M 1
=cos 0 s in
0 1 0- s in 0 cos
D 12M 1
(42)
여기서, D 12M 1은 식 (37)이므로, 이를 대입하여 정리하고, z 방향 성분만을 구하면 다음과
같다.
M 13 = - s in {I 1x 1x + 1y 1z ( I 1z - I 1y ) }+ cos s in {I 1y 1y + 1z 1x ( I 1x - I 1z ) }
+ cos cos {I 1z 1z + 1x 1y ( I 1y - I 1x ) }(43)
외부 짐발 모터 축에 대한 모멘트 관계식은 식 (39), (41), (43)의 합으로 이루어진다.
직류 모터 운동 방정식과 기어 효과를 포함하기 위해서는 각 모터에 대한 모멘트 관계식을
각 축에 대한 회전 각속도 1x , 2y , 3z 의 항으로 정리해야 한다.
각 모터 축에 대한 모멘트 관계식이 1y , 1z , 2x , 2z 항으로 표현되어 있으므로,
- 19 -

1x , 2y , 3z 와의 관계식을 구해야 한다.
이들 관계를 정리하면 다음과 같다.
2x = dd t
( - s in 3z ) = - s in 3z - cos 3z
2z = dd t
( cos 3z ) = cos 3z - s in 3z
(44)
1y = ddt
( cos 2y + s in 2z )
= cos 2y + s in 2z - s in 2y + cos 2z
= cos 2y + s in ( cos 3z - s in 3z ) - s in 2y + cos 2z
= cos 2y + s in cos 3z - s in s in 3z - s in 2y + cos 2z
(45)
1z = ddt
( - s in 2y + cos 2z )
= - s in 2y + cos 2z - cos 2y - s in 2z
= - s in 2y + cos ( cos 3z - s in 3z ) - cos 2y - s in 2z
= - s in 2y + cos cos 3z - cos s in 3z - cos 2y - s in 2z
(46)
위 관계식을 이용하여 내부 짐발 모터 회전축에 대한 토크 M dy에 대한 관계식인 식 (38)을
정리하면 다음과 같다.
M dy = I 2y 2y + 2z 2y ( I 2x - I 2z ) + cos {I 1y 1y + 1z 1x ( I 1x - I 1z )}
- s in {I 1z 1z + 1x 1y ( I 1y - I 1x )}
= I 2y 2y + cos I 1y ( cos 2y + s in cos 3z - s in s in 3z - s in 2y + cos 2z )
- s in I 1z ( - s in 2y + cos cos 3z - cos s in 3z - cos 2y - s in 2z )
+ cos 1z 1x ( I 1x - I 1z ) - s in 1x 1y ( I 1y - I 1x )
= I 2y 2y + cos 2 I 1y 2y + I 1y cos s in cos 3z
+ s in 2 I 1z 2y - I 1z s in cos cos 3z
+ cos I 1y ( - s in s in 3z - s in 2y + cos 2z )
- s in I 1z ( - cos s in 3z - cos 2y - s in 2z )
+ cos 1z 1x ( I 1x - I 1z ) - s in 1x 1y ( I 1y - I 1x )
(47)
- 20 -
= ( I 2y + cos 2 I 1y + s in 2 I 1z ) 2y + cos s in cos ( I 1y - I 1z ) 3z
+ cos { 1z 1x ( I 1x - I 1z ) - s in I 1y s in 3z - I 1y s in 2y
+ I 1y cos 2z } - s in { 1x 1y ( I 1y - I 1x ) - cos I 1z s in 3z
- I 1z cos 2y - I 1z s in 2z }
그리고, M dz 를 위 관계식을 이용해 정리하기위해, M dz 는 다음과 같이 세 부분으로 나누어
정의할 수 있다.
M dz = M 3z + M 23 + M 1
3 (48)
이 세 부분에 대해 각각 정리하면 다음과 같다.
M 3z = I 3z 3z (49)
M 23 = - s in I 2x 2x - ( I 2z - I 2y ) 2y 2z s in + cos I 2z 2z + cos ( I 2y - I 2x ) 2x 2y
= - s in I 2x ( - s in 3z - cos 3z ) + cos I 2z ( cos 3z - s in 3z )
- ( I 2z - I 2y ) 2y 2z s in + cos ( I 2y - I 2x ) 2x 2y
= ( s in 2 I 2x + cos 2 I 2z ) 3z + s in I 2x cos 3z - cos I 2z s in 3z
- ( I 2z - I 2y ) 2y 2z s in + cos ( I 2y - I 2x ) 2x 2y
(50)
M 13 = - s in {I 1x 1x + 1y 1z ( I 1z - I 1y )}+ cos s in {I 1y 1y + 1z 1x ( I 1x - I 1z )}
+ cos cos {I 1z 1z + 1x 1y ( I 1y - I 1x )}
= - s in I 1x 1x + cos s in I 1y ( cos 2y + s in ( cos 3z - s in 3z - 2y ) + cos 2z )
+ cos cos I 1z ( - s in 2y + cos cos 3z - cos s in 3z - cos 2y - s in 2z )
- s in 1y 1z ( I 1z - I 1y ) + cos s in 1z 1x ( I 1x - I 1z ) + cos cos 1x 1y ( I 1y - I 1x )
= - s in I 1x 1x + cos s in cos ( I 1y - I 1z ) 2y + cos 2 ( s in 2 I 1y + cos 2 I 1z ) 3z
+ cos s in I 1y ( - s in s in 3z - s in 2y + cos 2z )
+ cos cos I 1z ( - cos s in 3z - cos 2y - s in 2z )
(51)
- s in 1y 1z ( I 1z - I 1y ) + cos s in 1z 1x ( I 1x - I 1z ) + cos cos 1x 1y ( I 1y - I 1x )
- 21 -

3 .3 .7 관계식 결합
직류 모터와 기어 및 운동판에 대해 개별적으로 수학적 모델링을 수행하였다. 3 자유도 운
동판은 각 축에 대해 개별 모터를 사용하여 롤, 피치, 요를 제어함으로 3개의 모터축에 대해
3개의 비선형 방정식을 유도해야 한다.
위 세 요소에 대한 식에서 기어 효과식에 직류모터에서의 토크와 운동판에서의 토크를 결
합하면 제어 입력값인 전압에 대한 각 축의 회전 각속도에 대한 비선형 관계식을 구할 수 있
다.
우선 각 모터 축에 대한 모멘트 식인 식 (35), (47), (48)을 정리하면 다음과 같은 형태를 가
진다.
T M T = + = A + B (52)
여기서, T M T는 각 모터 회전축에 작용하는 토크이고, 는 각 모터 회전축에서의 테이블
의 각속도로써 T M T = [ M dx M dy M dz ] T , = [ 1x 2y 3z ] T 이다.
발란싱에 의해 무게 중심에 의한 모멘트는 없으므로 기어 효과 관계식인 식 (18)에서 T M
은 0이고 다음 관계가 성립한다.
JMdd t
+ T M = J Mddt
= R f N = T M T (53)
식 (18)과 식 (53)를 이용하여 정리하면, 직류 모터, 기어, 운동판의 방정식을 결합한 모멘
트 관계식은 다음과 같다.
N Rr
T - T M T = JN R 2
r 2dd t
(54)
여기서, N은 직류 모터의 개수이며, R은 주 기어의 반지름, r은 직류 모터측 기어의 반지름,
T는 직류 모터에 의한 토크, J는 직류 모터의 관성 모멘트이다.
- 22 -

여기서, C = N Rr
T , D = JN R 2
r 2 라 하고, 위 식 (52)와 (54)을 정리하면,
(A + D ) = C - B (55)
이다.
여기서, A, B, C, D 행렬은 다음과 같다.
A =
I 1x 0 0
0 I 2y + cos 2 I 1y + s in 2 I 1z cos s in cos ( I 1y - I 1z )
- s in I 1x cos s in cos ( I 1y - I 1z ) I 3z + s in 2 I 2x + cos 2 I 2z + cos 2 ( s in 2 I 1y + cos 2 I 1z )
(56)
B =
1y 1z ( I 1z - I 1y )
cos { 1z 1x ( I 1x - I 1z ) - s in I 1y s in 3z - I 1y s in 2y + I 1y cos 2z }- s in { 1x 1y ( I 1y - I 1x ) - cos I 1z s in 3z - I 1z cos 2y - I 1z s in 2z }
B 3
(57)
여기서, B 3는 다음과 같다.
B 3 = s in I 2x cos 3z - cos I 2z s in 3z - ( I 2z - I 2y ) 2y 2z s in + cos ( I 2y - I 2x ) 2x 2y
+ cos s in I 1y ( - s in s in 3z - s in 2y + cos 2z )
+ cos cos I 1z ( - cos s in 3z - cos 2y - s in 2z )- s in 1y 1z ( I 1z - I 1y ) + cos s in 1z 1x ( I 1x - I 1z ) + cos cos 1x 1y ( I 1y - I 1x )
(58)
C =
N 1(Rr )
1T 1
N 2(Rr )
2T 2
N 3(Rr )
3T 3
(59)
D =
JN 1 (Rr )1
2
0 0
0 JN 2 (Rr )
2
2
0
0 0 JN 3 (Rr )
3
2
(60)
- 23 -

4 . 선형화 및 전달함수
3 자유도 운동판은 HILS 시스템에서 시뮬레이션 결과를 구현하는 장치로써 롤, 피치, 요
자세 명령을 빠르게 추종해야한다. 이를 위해 본 논문에서는 수평 등속 비행 상태인 롤, 피
치, 요 자세가 0인 조건을 정상 상태 조건으로 설정하고, 이 점에 대해 선형제어기를 설계하
였다. 이를 위해 3축에 대한 비선형 운동 방정식을 선형화하여 전달함수를 구해야 한다.
4 .1 선 형화
상태 변수를 정상 상태량과 교란 상태량의 합으로 나타내면 다음과 같다.
= + , = + (61)
여기서, 는 각속도의 정상상태량이고 는 각도의 정상상태량이고, 는 각속도의 교란
상태량, 는 각도의 교란 상태량을 나타낸다.
마찬가지로 운동판에 작용하는 모멘트도 다음과 같이 나타낼 수 있다.
M = M + M (62)
수평 등속 비행에 대한 정상상태일 경우, 작용하는 모멘트와 이에 의한 상태변수의 변화율
은 0으로써 다음과 같다.
= 0 , M = 0 , = 0 (63)
우선 내측 운동판의 모터 축에 대한 토크 관계식은 식 (35)에서 다음과 같다.
M dx = I 1x 1x + 1y 1z ( I 1z - I 1y ) (64)
위 식에서 1과 2에 대한 곱에 대해 미소 교란을 적용하면 다음과 같다.
1 2 = ( 1 + 1 ) ( 2 + 2)= 1 2 + 1 2 + 2 1 + 1 2
0(65)
- 24 -
따라서, 이후 비선형 식의 선형화에서 각속도 간의 곱의 항은 무시하도록 한다.
식 (64)에 교란된 상태 변수를 대입하면 다음과 같다.
M dx + M dx = I 1x ( 1x + 1x ) (66)
정상 상태일 경우, M dx , 1x 는 0 이므로, 위 식을 정리하면 다음과 같이 내측 운동판 모터
축에 대한 토크의 선형화된 식을 얻는다.
M dx = I 1x 1x (67)
내부 짐발의 회전축에 대해 유도한 비선형 모멘트 관계식인 식 (47)를 정상상태에 대해 선
형화 하도록 하자.
각도와 각속도의 상태 변수에 대해 미소 교란을 적용한 후, 위 비선형 방정식에 대입하면
다음과 같다.
M dy + M dy = ( I 2y + cos 2 ( + )I 1y + s in 2 ( + )I 1z ) ( 2y + 2y )
+ cos ( + ) s in ( + ) cos ( + ) ( I 1y - I 1z ) ( 3z + 3z )(68)
한편, 각도의 교란 상태량 , 에 대해 미소각 정의를 사용하면 다음의 관계가 성립한
다.
즉, cos , cos 1 , s in , s in , 라 하면,
s in ( + ) = s in cos + cos s ins in + cos
cos ( + ) = cos cos - s in s incos - s in
(69)
cos 2 ( + ) = ( cos - s in ) ( cos - s in )= cos 2 - 2 s in cos + 2 s in 2
cos 2 - 2 s in cos
s in 2 ( + ) = ( s in + cos ) ( s in + cos )= s in 2 + 2 s in cos + 2 cos 2
s in 2 + 2 s in cos
(70)
- 25 -

cos ( + ) s in ( + ) cos ( + )
= ( cos s in + cos 2 - s in 2 - 2 s in cos ) cos ( + )= cos s in cos + cos 2 cos - s in 2 cos- cos s in s in - cos s in + s in 2 s in
(71)
이다.
위 관계식과 정상상태 조건을 사용하면, 위 비선형 방정식은 다음과 같이 정리된다.
M dy = ( I 2y + I 1y ) 2y + ( I 1y - I 1z ) 3z (72)
위 식에서 는 정상상태에서 롤 각도의 변화량으로써, 이 경우, 다변수 (Multi- Input
Multi- Output , MIMO) 제어기 문제로 귀결된다. 이는 본 논문의 범위를 벗어나는 것으로
써, 본 논문에서는 각 축에 대한 제어기 설계시 이외의 축은 운동하지 않고, 고정되어있다고
가정한다.
따라서, 내부 짐발 모터축에 대한 선형화된 방정식은 다음과 같다.
M dy = ( I 2y + I 1y ) 2y (73)
내측 운동판, 내부 짐발 모터축에 대해 선형화한 것과 같은 방법으로 외부 짐발의 비선형
관계식을 선형화 하면 다음과 같은 선형화된 식을 얻는다.
M 3z = ( I 3z + I 2z + I 1z ) 3z (74)
4 .2 전 달함 수
모터, 기어 효과, 선형화된 테이블 관계식을 결합하여, 제어 입력인 전압에 대한 출력 신호
인 테이블 자세각을 나타내는 전달함수를 구한다.
우선 내측 운동판 관계식인 식 (67)와 식 (54)을 결합하여, 라플라스(Laplace) 변환하면 다
음과 같다.
(I 1x + JN R 2
r 2 )s ( s)s = NRr
T ( s) (75)
직류 모터 방정식인 식 (2)와 식 (4)에 대해 라플라스 변환을 수행하면 다음과 같다.
- 26 -

T ( s) = K T I a ( s) (76)
V a ( s) = R a I a ( s) + L asI a ( s) + K eRr
( s) (77)
식 (75), (76), (77)을 정리하여 내측 운동판 회전축에 대한 전달함수를 구하면 다음과 같다.
G 1( s) = 1( s)V a ( s)
= 1
{( R a + L as)( I 1x + J N R 2
r 2 ) s
NRr
K T
+ K eRr }
(78)
내부 짐발과 외부 짐발에 대해서도 식 (73), (74)을 이용하여 정리하면 전달함수는 다음과
같다.
G2 ( s) = 2 ( s)V a ( s)
= 1
{( R a + L as)( I 2y + I 1y + J N R 2
r 2 )s
NRr
K T
+ K eRr }
(79)
G3 ( s) = 3 ( s)V a ( s)
= 1
{( R a + L as)(( I 3z + I 2z + I 1z ) + J N R 2
r 2 )sN
Rr
K T
+ K eRr }
(80)
4 .3 설 계예
<그림 3>의 형상에 대해 임의의 3 자유도 운동판을 설계하였다. 각 운동 테이블 좌표계에
대해 구한 관성 모멘트는 다음과 같다.
<표 2> 3 자유도 운동판의 관성 모멘트
테이블 I xx ( kg m 2) I yy ( kg m 2) I z z ( kg m 2)
내측 운동판 0.003012 0.010638 0.010250
내부 짐발 0.017781 0.019525 0.036247
외부 짐발 0.359584 0.172852 0.191967
- 27 -
운동판은 직류모터에 의해 구동되는데 이때의 회전 속도 및 이용 토크는 모터의 수와 기어
비에 의해 영향을 받는다. 모터의 수가 증가하면, 이용가능한 토크가 증가하고, 기어비가 커
질 경우, 응답특성이 빨라지게 된다.
3 자유도 운동판을 설계시에는 제어 입력이 포화되지 않는 범위내에서 원하는 응답 속도를
가질 수 있도록 적절한 모터의 수와 기어비가 결정되어야 한다.
본 논문에서 임의로 설정한 모터 수 및 기어비는 각 축에 대해 다음과 같다.
< 표 3> 3 자유도 운동판 구동을 위한 모터수 및 기어비
테이블 내측 운동판 내부 짐발 외부 짐발
모터 수 (N ) 2 4 7
기어비 ( Rr
) 7.6 10 20
식 (78), (79), (80)와 <표 2> , <표 3>의 결과를 이용해 제어 신호인 PWM 값에 대한 각
테이블의 회전 각도의 전달함수를 구하면 다음과 같다.
( s)u ( s) = 0 .03505
1 .392 10 - 5s3 + 0 .01375 s2 + 0 . 10725s
( s)u ( s) = 0 .09224
1 . 141 10 - 4s3 + 0 . 11275 s2 + 0 .371s
( s)u ( s)
= 0 .32288 .9 10 - 4 s3 + 0 .8793 s2 + 2 .597s
(81)
- 28 -

5 . P D 제어기
제어 목적을 이루기 위해서 제어시스템은 여러 가지 기본 구성 방식을 선택할 수 있는데,
본 논문에서는 직류 서보 모터의 위치 제어를 위해서 간단하면서도 효율이 좋아 실제 현장에
서 많이 사용중인 PD 제어기를 사용하였다[10][11].
각 축에 대한 전달함수 관계에서 출력값이 자세일 경우, 시스템은 적분기를 포함하고 있다.
시스템 전달함수에 적분기가 포함되어있을 경우, 단위 계단 입력에 대해 정상상태 오차는 0
으로 수렴하게 된다.
따라서, PID 제어기에서 이득 증가에 따른 정상상태 수렴 특성을 향상시키는 적분제어기를
제외하고, PD 제어기를 사용하였다.
PD 제어기를 사용하는 제어 시스템의 블록 선도는 다음과 같다.
< 그림 12> PD 제어기를 포함한 제어 시스템의 블록선도
여기서, R(s )는 명령 입력이고, E (s )는 오차, U (s )는 제어 입력 신호이다. 그리고, C(s)는
출력신호로써 본 논문에서는 운동판과 짐발들의 관성 모멘트에 대한 자세인 오일러 각이다.
5 .1 정 착시 간과 감쇠 비
3축 운동판의 제어기 설계를 위해 주어지는 정착시간(Settling T ime)은 탑재물의 각속도
범위에 의해 결정된다. 본 논문의 목표가 무인 비행기를 테스트할 수 있는 운동판 제작이므
로, KT - 1의 무선조종 (Radio Control, RC) 모형 항공기에 대한 실속 비행 특성에 대한 자
료에서 제어기 설계 요구사항을 정하도록 하였다. 아래표는 무선조종 모형 항공기의 04호기
와 그 변형 형상에 대한 롤, 요, 피치 각속도의 최대치를 정리한 것이다[12].
- 29 -
<표 4> KT - 1 무선조종 모형기의 최대 롤, 피치, 요 각속도
종류롤 각속도
(deg/ s )
요 각속도
(deg/ s )
피치 각속도
(deg/ s )
04호기무동력 실속 70 70 65
동력 실속 90 75 65
03호기
날개
부착
무동력 실속 100 50 45
동력 실속 85 70 65
스핀인 경우, 더 큰 각속도를 나타내지만, 스핀은 시뮬레이션 자체가 불가능함으로, 이에 대
해서는 고려하지 않는다.
위 표에서 롤 각속도는 최대 100 deg/ s , 피치 각속도는 65 deg/ s , 요 각속도는 75 deg/ s
이다.
단위 계단 응답 특성을 이용하여 제어기를 설계할 것이므로, 2차계 시스템에서 응답 속도를
지칭하는 정착시간이 결정되어야 한다.
최대 각속도에 대해 시스템 모델링의 불확실성과 지연 특성을 고려하여 안전계수를 1.2이상
으로 설정하여 최대 각속도를 설정하였다.
이에 대해 단위 변환하여, 단위 계단 응답에 대해 결정한 정착시간은 다음과 같다.
< 표 5> 정착시간 요구사항
제어 명령 롤 피치 요
정착시간 (sec) 0.45 0.7 0.6
2차계 시스템의 응답특성을 가질 경우, 최대 초과량(Maximum overshoot ) M p는 감쇠비
에 대해 다음 관계식을 만족한다.
M p = e-
1 - 2
(82)
즉, 0.4에서 0.8의 감쇠비를 가질 경우, 계단 함수 응답에 대한 최대 초과량은 25%에서
2.5%이다. 본 논문에서 운동판의 자세 정확도 요구값은 1 이므로, 본 시스템에 대한 최대
초과량은 10%로 정하였다.
- 30 -

5 .2 PD 제 어기 설계
내측 운동판, 내부 짐발, 외부 짐발 각각에 대한 제어 시스템은 동일한 구조를 가지고 있으
므로, 우선 내측 운동판 자세 제어를 위한 PD 제어기를 설계하였다[13].
내측 운동판의 전달함수는 식 (81)으로써 극점을 구해보면, 0, - 7.8544, - 980.17에 위치함을
알 수 있다. 이에 대한 rlocus를 그려보면 <그림 13>과 같다. 여기서, 우측 그림은 원점 근
처를 확대한 것이다.
<그림 13>에서 제어 이득이 증가할수록 불안전한 영역으로 극점이 이동함을 알 수 있다.
따라서, 원하는 응답특성을 만족하면서, 시스템이 안정하려면, 다음 <그림 14>와 같이 PD
제어기를 추가하여야 한다.
<그림 13> 내측 운동판의 r locu s
<그림 14> PD 제어기 포함시의 r locu s
- 31 -
K p가 216이고, T d가 0.0556인 경우, 내측 운동판의 단위 계단 입력에 대한 응답특성은 다
음과 같다.
<그림 15> 계단 함수 응답 그래프
위 그래프에서 정착시간은 0.204초이고, 최대 초과량은 9.4%로써 내측 운동판의 제어기 설
계 요구사항을 만족한다.
위와 같은 과정으로 세 개의 테이블에 대한 PD 제어기 이득을 구하고, 그에 대한 단위 계
단 입력의 응답특성을 구하면 아래와 같다.
<표 6> 운동판의 PD 이득 및 운동 특성
테이블 K p T d T s (sec) M P (% )
내측 운동판 216 0.0556 0.204 9.4
내부 짐발 160 0.125 0.432 9.3
외부 짐발 232.4 0.1506 0.534 8.6
- 32 -

6 . 비선형 시뮬레이션
5장에서 구한 PD 제어기는 3 자유도 운동판이 회전하지 않은 정상상태를 기준으로 선형화
한 시스템에 대해 설계한 결과이다. 그러나, 실제 3 자유도 운동판은 개별 운동판 상호간에
영향을 주고, 내부 운동판의 자세 변화에 따라 시스템의 특성이 달라지게 된다. 따라서 본 논
문에서 구한 제어기의 성능을 분석하고, 3 자유도 운동판의 운동 특성을 분석하기 위해 비선
형 시뮬레이션 프로그램을 작성하였고, 그 실행 결과는 아래와 같다[14].
<그림 16> 비선형 시뮬레이션 프로그램의 실행 화면
본 프로그램은 Visual C++ 6.0 기반에서 작성된 것으로써, 3 자유도 운동판의 설계 및 운
동 특성 테스트를 위해 다음의 기능을 포함하고 있다.
1) 운동판과 짐발의 크기 변형이 가능하고, 이에 따른 관성 모멘트를 자동으로 계산한다.
2) 운동판의 응답특성을 결정하는 각 축의 기어비 및 모터수의 변경이 가능하다.
3) 제어 이득을 입력하여 그 응답특성을 확인할 수 있다.
4) 개별 테이블의 운동을 3D 화면으로 확인 가능하다.
- 33 -
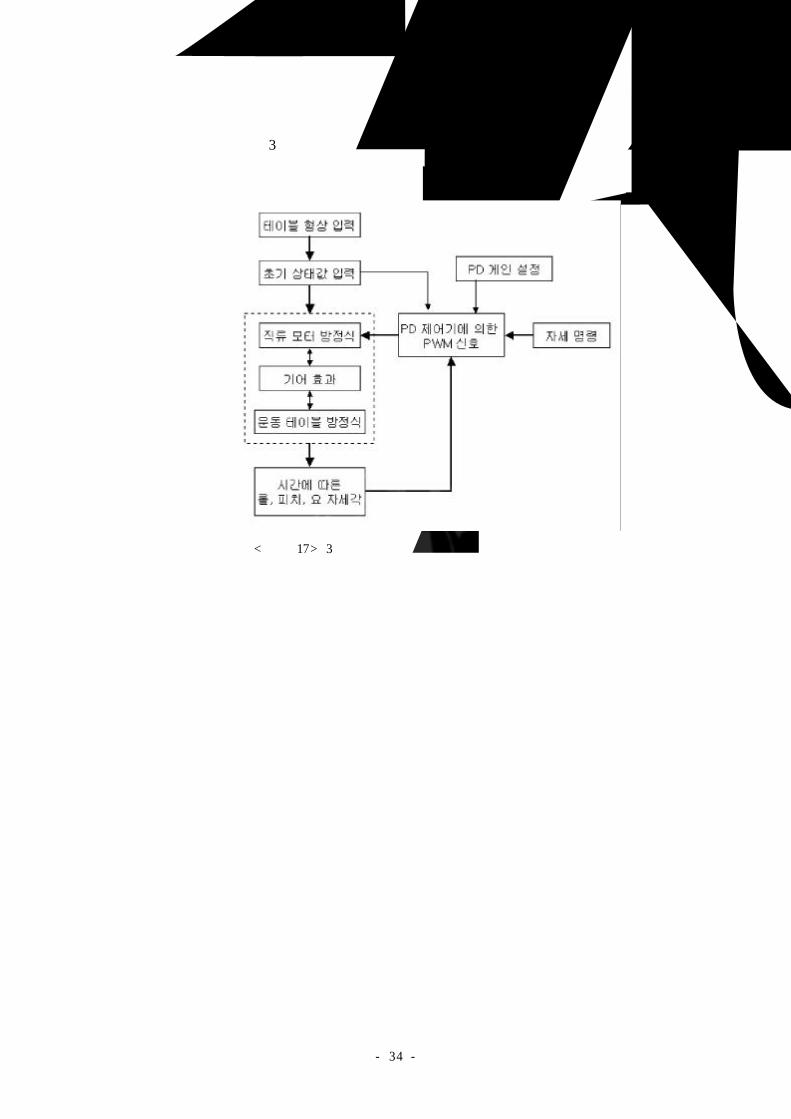
이러한 기능을 가지는 3 자유도 운동판 시뮬레이션 프로그램의 흐름도는 아래와 같다.
<그림 17> 3 자유도 운동판 시뮬레이션의 계산 흐름도
- 34 -
7 . 시뮬레이션 결과 및 검토
3 자유도 운동판은 각 테이블의 자세와 운동에 따라, 상호간의 운동에 간섭현상이 발생한
다. 본 논문에서는 각 축에 대해 개별 제어기를 설계한 후, 비선형 시뮬레이션을 수행하여 그
성능을 확인하였다. 이를 위해 3 자유도 운동판의 일반적인 운동 특성을 확인하였고, 개별 축
에 적용한 단위 계단 명령에 대한 응답 신호와 세 축에 대해 동시에 명령을 전달하였을 경우
의 응답 특성을 비교하였다. 운동판의 성능을 테스트하기 위해 수평 선회 명령에 대한 응답
특성을 확인하였다.
7 .1 3 자유 도 운 동판 의 운 동특 성
3 자유도 운동판은 각 테이블이 개별적으로 움직이지만, 식 (20)와 식 (52)에서 운동판과
짐발들은 서로 영향을 주고받는다. 이를 시뮬레이션을 통해 확인하기 위해 롤, 피치 테이블
회전축에 대해 제어기의 이득을 0으로 설정하여 자유로이 운동하는 상태로 하였다. 그리고
외부 짐발을 일정한 각속도로 회전시켰다. 시뮬레이션 조건은 다음과 같다.
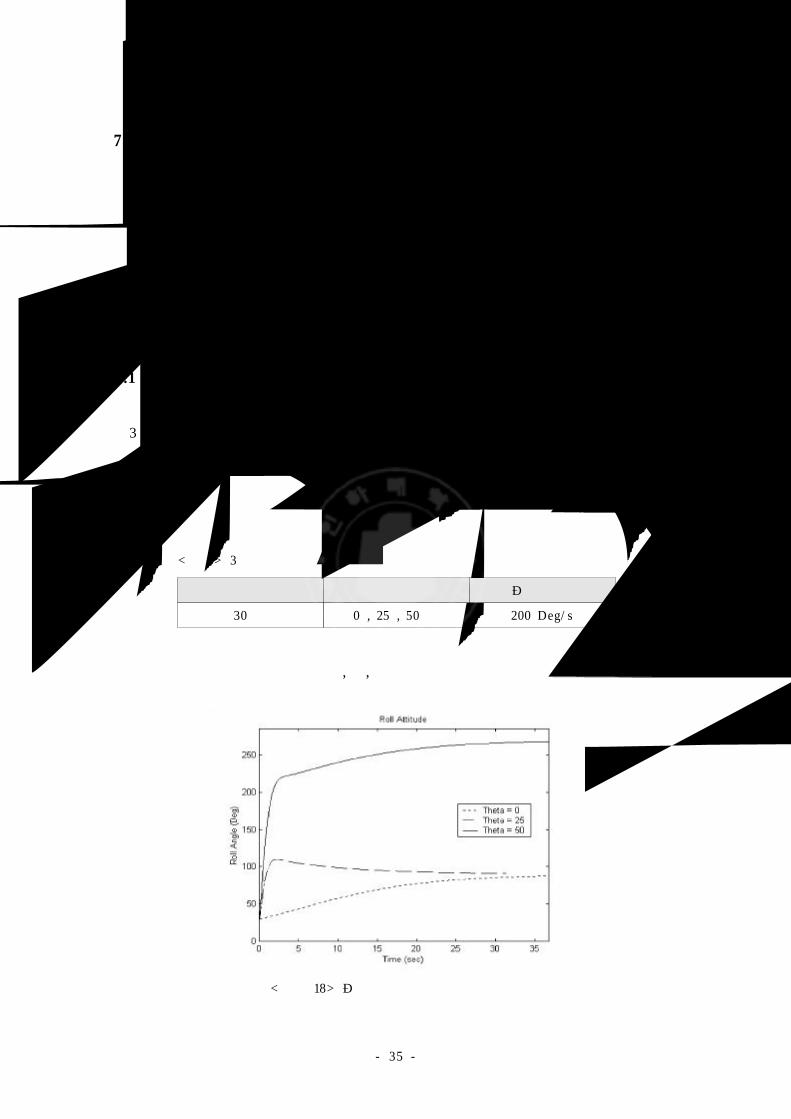
<표 7> 3 자유도 운동판의 운동 특성 확인을 위한 시뮬레이션 초기값
롤 자세 초기값 피치 자세 초기값 요 각속도
30 도 0 , 25 , 50 도 200 Deg/ s
위 조건에 대해 시뮬레이션한 결과, 롤, 피치의 자세 변화는 다음과 같다.
<그림 18> 요 운동에 따른 롤 자세 변화
- 35 -
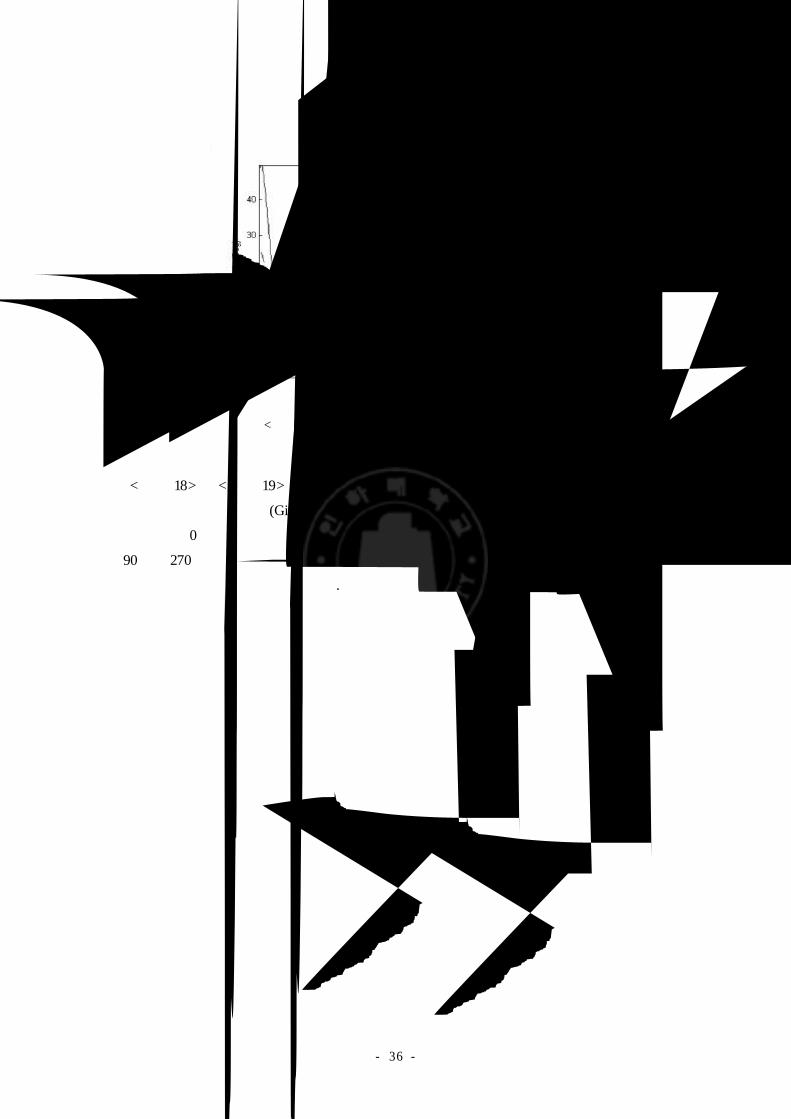
< 그림 19> 요 운동에 따른 피치 자세 변화
<그림 18>과 <그림 19>에서 외부 짐발이 회전함에 따라, 내측 운동판과 내부 짐발이 회
전함을 확인하여 짐발록(Gimbal lock)상태가 됨을 확인할 수 있다. 피치 자세는 시간이 지
남에 따라 0도로 감으로써 안정화함을 알 수 있고, 롤 자세는 피치가 0도인 시점에 이후에
90도나 270도로 안정화해 감을 확인할 수 있다. 이러한 현상은 세 축에 대해 동시에 자세를
제어할 경우에 그 영향이 나타난다.
- 36 -

7 .2 단 위 계 단 명 령에 대한 응답
각 축간의 간섭에 의해 명령 응답 특성이 달라지게 된다. 단위 계단 입력에 대해 개별 테이
블에 대한 명령값과 세 축에 대한 동시 명령의 응답 결과를 비교하였다.
1) 롤 단위 계단 입력에 대한 응답 신호.
< 그림 20> 롤 단위 계단 응답
<그림 20>에서 개별 축 명령과 3축 동시 명령 응답 특성이 다르지만, 최대 초과량과 정착
시간은 각각 4.5%, 0.38 초로써 <표 5>에서 정한 요구사항을 만족한다. 따라서, 본 논문에
서 구한 PD 제어기를 이용하여, 3축 동시 제어시 롤 제어가 가능함을 알 수 있다.
2) 피치 및 요 단위 계단 입력에 대한 응답 신호.
< 그림 21> 피치 및 요 단위 계단 응답 특성
- 37 -

<그림 21>에서 피치와 요 자세 명령에 대해 정착시간은 약 0.5초와 0.6초였다. 이는 <표
5>에서 결정한 요구 조건을 만족하고 있다.
<그림 20>과 <그림 21>에서 개별 축에 대한 응답신호와 3축 동시 입력에서의 응답신호에
서 차이가 발생하였지만, 롤, 피치, 요 자세 명령에 대해 모두 정착시간을 만족하였으므로, 본
논문에서 결정한 PD 제어기를 사용하여 제어가 가능함을 알 수 있다.
7 .3 선 회 운 동 응 답
HILS에서 운동판은 시뮬레이션 결과에 의해 구해진 자세를 실시간으로 구현하여야 한다.
항공기의 운동 중 수평 선회 명령에 대한 응답 특성을 조사해 보고 그 성능을 확인하였다.
운동 테이블에서 선회 명령은 다음과 같은 형태로 주어진다.
( t) = 0 , ( t) = 0 , ( t) = t (82)
여기서, 0 , 0는 초기 선회 롤, 피치 각도이고, 는 선회율이다.
선회율은 속도와 경사각의 함수로써 다음과 같다[15].
= gV
t an (83)
여기서, g는 중력 가속도이고, V는 비행 속도, 는 경사각이다.
위 식에서 속도가 고정될 경우, 선회율은 경사각에 의해 결정된다. 본 논문의 3 자유도 운동
판은 무인기를 대상으로 하고 있으므로, 현재 운용중인 무인기중 하나인 「Shadow 600」
의 최적 순항 속도인 75 mph를 기준 속도로 정하고, 피치각이 영도이고, 경사각 30도, 45도
60도에 대한 수평 선회 시뮬레이션을 수행하였다. 이때, 경사각에 대한 선회율은 다음과 같
다.
<표 8> 수평 선회 명령 기준값
경사각 (Deg ) 30 45 60
선회율 (Deg/ s ) 9.454 16.375 28.3623
- 38 -
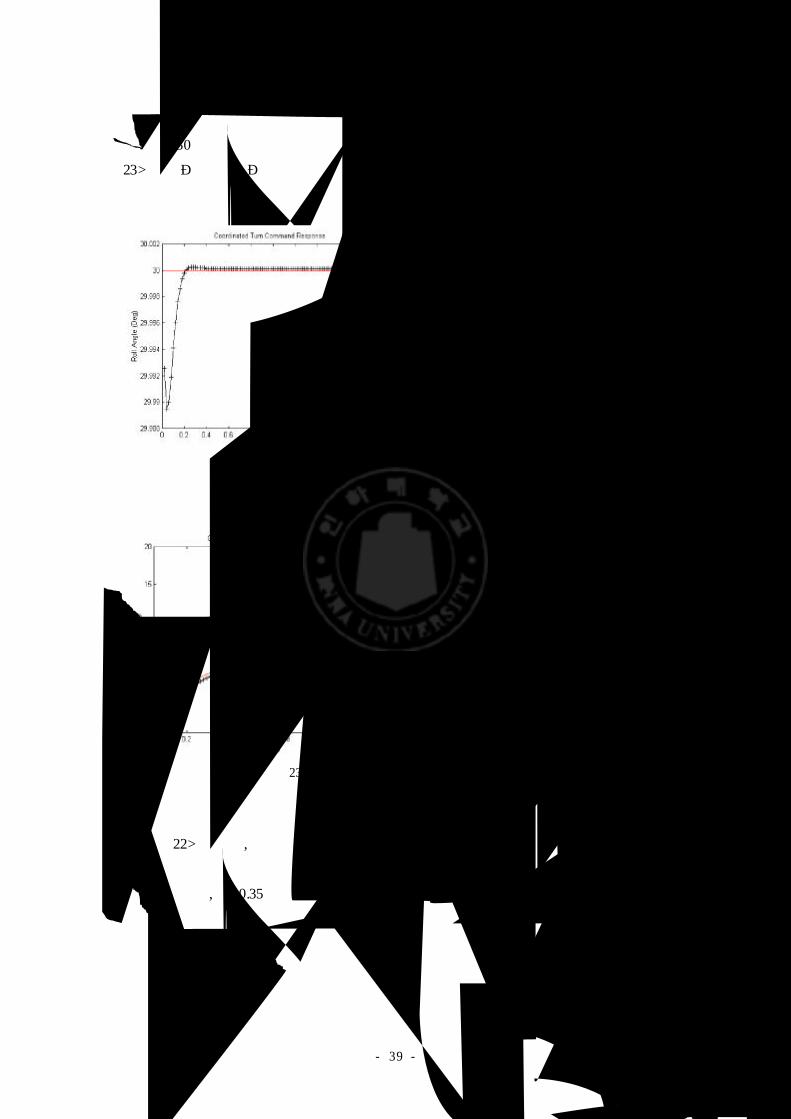
경사각 30도인 경우의 응답 특성으로 <그림 22>에서 롤과 피치 자세를 나타내고, <그림
23>에서 요 자세와 요 각도 오차를 나타내었다.
<그림 22> 경사각 30도에서의 롤, 피치 자세
< 그림 23> 경사각 30도에서의 요 자세와 오차
<그림 22>에서 롤, 피치 자세의 초기 설정 값이 초기 요 자세 명령에 의해 영향을 받았다
가, 다시 원래 자세를 찾아감을 확인할 수 있다. 그러나 <그림 23>에서 요 자세 명령은 시간
이 지나더라도, 약 0.35도의 오차를 가짐을 확인할 수 있다. 즉, 각속도 명령에 대해 보상이
되지 않음을 확인할 수 있다.
- 39 -

경사각이 45도인 경우의 응답 특성으로써, <그림 24>는 롤, 피치 자세의 변화이고, <그림
25>는 요 자세의 변화와 요 각도 오차를 나타낸다.
< 그림 24> 경사각 45도에서의 롤, 피치 자세
< 그림 25> 경사각 45도에서의 요 자세와 오차
<그림 24>에서 롤, 피치 자세의 초기 설정 값이 초기 요 자세 명령에 의해 영향을 받았다
가, 다시 원래 자세를 찾아감을 확인할 수 있다. 이때 롤 자세에서 정상상태 오차가 약
0.00043도 발생하였다. 그리고, <그림 25>에서 요 자세 명령은 시간이 지나더라도, 약 0.55
도의 오차를 가짐을 확인할 수 있다. 즉, 각속도 명령에 대해 보상이 되지 않음을 알 수 있다.
- 40 -
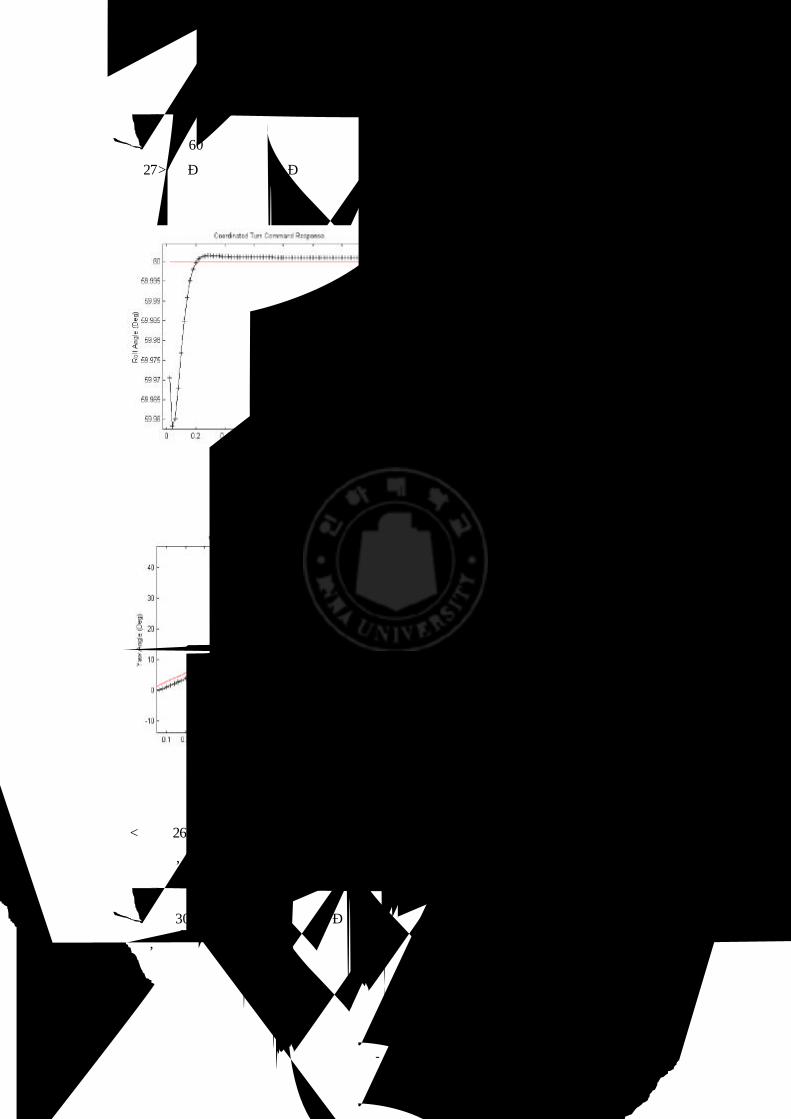
경사각이 60도인 경우의 응답 특성에 대해 <그림 26>은 롤과 피치 자세의 변화이고, <그
림 27>은 요 자세 변화와 요 각도 오차이다.
< 그림 26> 경사각 60도에서의 롤, 피치 자세
< 그림 27> 경사각 60도에서의 요 자세와 오차
<그림 26>에서 경사각 60도인 경우의 롤, 피치 자세는 경사각 30도와 45도에 대한 반응과
동일하고, 초기 설정한 값이 초기 요 자세 명령에 의해 영향을 받았다가, 다시 원래 자세를
찾아감을 알 수 있다. 요 자세 오차는 약 1도의 오차를 가짐을 확인할 수 있다.
경사각 30도, 45도, 60도인 경우, 요 자세 명령에 대해 롤과 피치 자세가 초기에 영향을 받
지만, 일정시간이 경과한 후, 일정한 오차를 가지면서 고정된 값으로 결정됨을 확인할 수 있
다.
- 41 -
요 자세 명령에 대한 응답 특성 그래프에서는 선회율이 증가할수록 오차가 증가하고, 경사
각 60도의 조건에 대한 선회율에서는 본 논문에서의 요구사항인 1도의 정확도를 벗어나면서
응답함을 확인할 수 있다.
정상 선회 명령은 요 자세각이 시간에 대해 비례하는 값으로써, 이는 요 각속도가 명령으로
주어진 경우이다. 이에 의해 위 응답 특성 그래프에서 롤, 피치, 요 자세에 대해 정상상태 오
차가 발생하였다.
이를 해결하기 위해서는 각 운동판의 자세각과 함께, 각 운동판의 각속도를 측정하고 이를
이용하여, 각속도 제어기를 설계해야 한다. 이를 이용해 각속도 명령에 대한 정상상태 오차
를 보상해 주어야 할 것이다.
- 42 -

8 . 결론
3 자유도 운동판을 설계 및 제작할 경우, 토크 관계와 운동 특성에 대한 이해가 선행되어야
한다. 본 논문은 3 자유도 운동판을 개발할 경우 설계 인자들인 운동판과 짐발들의 크기, 기
어비, 모터의 개수를 변경하여, 운동특성을 파악할 수 있는 설계 도구를 제공하는데 그 목적
이 있다. 이를 위해 기본 형상을 정하고, 이에 대해 설계의 변화에 따른 운동을 시뮬레이션하
는 비선형 시뮬레이션 프로그램을 작성하였다.
비선형 시뮬레이션 및 제어기 설계를 위해 3 자유도 운동판의 구성요소인 직류 모터와 기
어, 운동판에 대한 운동 방정식을 유도하고 이들을 결합하여, 모터 회전축에 대한 3개의 모멘
트 관계식을 구하였다.
운동판의 자세 제어를 위한 전달함수를 구하였고, 무인 항공기 테스트를 위한 제어기의 요
구사항을 정하고, 이를 만족하는 PD 제어기를 설계하였다. PD 제어기의 성능과 사용 가능
성을 확인하기 위해, 비선형 시뮬레이션 프로그램에 적용하였고, 이에 따른 문제점을 파악하
였다.
선형 제어기인 PD 제어기를 비선형 시뮬레이션 프로그램에 적용한 결과, 각 테이블의 자세
변화에 의해 간섭 현상이 발생하였지만, 초기 제어기 설계시에 설정한 성능 요구사항을 만족
함을 확인하였다. 따라서, PD 제어기만으로도 원하는 자세 명령 응답특성을 나타내는 3 자
유도 운동판 제작이 가능함을 알 수 있다.
그러나, 항공기가 수평 선회하는 상황을 시뮬레이션 하기 위해, 임의의 무인기에 대한 롤,
피치, 요 자세 명령을 주었을 경우에는 선회율의 증가에 비례하는 오차가 발생함을 알 수 있
다. 따라서, 각속도 명령에 대해서는 각속도 제어기를 부착하여 이를 보상해 주어야 할 것으
로 본다.
이상의 시뮬레이션 결과를 검토한 결과, 본 논문의 방법을 적용하여 3 자유도 운동판의 기
초 설계를 하는 것이 가능하다는 결론을 얻었다.
추후 연구 과제로 다변수 제어나 비선형 제어를 통해 PD 제어기의 성능을 향상시키는 노력
이 필요할 것으로 본다. 또한, 본 논문에서는 마찰에 따른 효과를 고려하지 않았는데, 이후 1
축 운동판을 이용한 실험을 통해 마찰에 대한 효과를 수식화하여 이를 적용한 시뮬레이션이
이루어져야 할 것이다.
- 43 -

9 . 참고 문헌
[1] 비행 시뮬레이터를 이용한 Hardware- in- the- Loop 기술 개발 연구 , 한국항공우주연
구소, 1994. 9
[2] 김 경일, DSP를 이용한 다중 직류 서보 모터 제어에 관한 연구 , 인하대학교 대학원,
1994
[3] 마이크로 컴퓨터에 의한 모터의 제어. 기전 연구사. 1993
[4] Inertial Guidance T est Systems, Product Catalog, Contraves
[5] 그림으로 알 수 있는 모터의 구조. 세화. 1997
[6] 메커트로닉스를 위한 모터 제어 기술, 성안당. 1992
[7] Control of Electrical Drives, Leonhard, 1984
[8] Inertial Navigation Systems, Charles Broxmeyer . 1964
[9] Principles of Dynamics, Donald T . Greenwood. 1988
[10] Milic R. Stojic, Design of the Microprocessor - Based Digital System for DC
Motor Speed Control", IEEE T ransactions on industrial Electronics, Vol IE - 31.
No. 3 , August 1984
[11] Nicholas J . Krikelis, "Microprocessor Implementation of PID Controller s and
Lead- Lag Compensator s", IEEE T ransactions on industrial Electronics, Vol
IE- 31, No. 1, February, 1984
[12] RC 모델활용 실속/ 스핀 비행특성 분석 및 외형 최적화 연구. 인하대학교 부설 항공경
영 관리연구소. 1996.3
[13] Modern Control Engineering, Ogata .
[14] Numerical Methods using MAT LAB, Mathew s Fink. 3rd Ed.
- 44 -

[15] Flight Performance of Aircraft , S . K. Ojha, AIAA Education Series, 1934
[16] Engineering Mechanics Dynamics, Braja M. Das, Aslam Kassimali, Sedat
Sami.
[17] H. Weiss, "Quaternion- Based Rate/ Attitude T racking System with Application
to Gimbal Attitude Control", Journal of Guidance, Control and Dynamics, Vol
16, No 4, July - August, 1993
[18] Digital Control of Dynamic Systems, Gene F . Franklin, J . David Powell.
Michael Workman. T hird Ed.
[19] PID Controllers : T heory , Design, and T uning, K. Astrom and T . Hagglund
[20] Dynamic Simulation of Electric Machinery using Matlab/ Simulink, Chee- Mun
Ong, 1998
- 45 -

감사 의 글
6년 전 올라온 인천에서 시작한 대학, 대학원 생활을 마치면서, 많은 것을 이루었
다는 자만도 잠시, 아직은 모자란 나 자신을 느끼면서, 졸업을 맞이합니다. 25 라
는 숫자를 만들기 위해, 내 맘속에 채워온 것들을 가지고, 이제 사회로 나아가 그
동안 받아온 것들에 대해 보답하려 합니다.
항공 공학에 대한 사랑과 열정을 가르쳐주신 조옥찬 교수님과 김진호 교수님, 조맹
효 교수님, 최기영 교수님, 그리고 항공과 교수님께 감사 드립니다. 그리고, 공학
자의 자세와 Si mul at or 에 대한 꿈을 알려주시고, Sys t em Engi neer 가 되기 위한 길
로 이끌어 주신 박춘배 교수님께 진심으로 존경과 감사의 마음을 전하고 싶습니다.
2년이란 대학원 생활 동안, 모자란 후배를 이끌고 다독여 주신, 구조 실험실의 영
재형과 분사 추진 실험실의 권섭이형, 유도 항법 제어실험실의 인중이형, 동준이
형, 오재일 소령님, 영목이형, 아음속 실험실의 귀보형과 운갑이형에게 감사하며,
형님들의 무궁한 발전을 기대합니다.
낯선 대학원 생활속에서, 한잔 술에 서로의 얘기를 함께 논했던, 항공공학과 대학
원 99학번 동기들, 기혁이형, 동인이, 성현이, 현주, 석규형, 우제형 모두 수고하
셨습니다. 멋진 사회인 되시길 바랍니다.
그리고, 함께 실험실에서 밤을 새며 쏟아지는 프로젝트에 힘을 모았던 실험실 가족
들, 큰형으로 우리에게 힘이 되어준 종욱이형과 실험실 축으로써 활동해준 동훈이
형, 궂은 일도 묵묵하게 맡아준 래홍이와 함께 고민하며 웃어줬던 세원이에게 고마
운 맘과 함께, 서로의 맘속에 계속 살아가자고 얘기하고 싶습니다.
논문 지도와 함께, 선배 이상의 모습을 보여주신 이해창 선배님과 졸업후에도 곁에
서 지켜봐 주신 무영이형, 형선이형, 윤철이형, 지용이형, 그리고, 친동생처럼 걱
정해 주신 새신랑 명성이형과 새 색시 인규 누나에게 고마움을 전합니다.
「FDC- Lab」이라는 이름으로 지켜온 실험실을 이끌어갈 종진이형과 상웅이, 그리고
신입생들과 군대에서 새 모습을 찾을 용탁이, 그리고, 구조 실험실의 윤철이형에게
앞날의 자신을 항상 맘에 간직하고, 포기하지 않는 도전을 기대합니다.
끝으로, 힘들었던 1년 동안 밝은 미소로 날 지켜봐 준 은미와 고향에서 항상 기다
려주는 사춘기 멤버들, 못난 동생 다독여준 큰 누나, 작은 누나, 자주 보지 못해
도 반갑게 맞아준 매형, 그리고, 끊이지 않는 사랑과 아들에 대한 믿음으로 보살펴
주신 아버지, 어머니께 사랑합니다. 라는 한마디와 함께 이 글을 바칩니다.
2000년 12월 겨울밤에
송 승욱
- 46 -







![[NDC 14] 가죽 장화를 먹게 해달라니 - 의 자유도 높은 아이템 시스템 구현](https://static.fdocument.pub/doc/165x107/54941bb8b47959384d8b49de/ndc-14-.jpg)










