3. METODE PENYELESAIAN TUGAS AKHIR
15
14 Universitas Kristen Petra 3. METODE PENYELESAIAN TUGAS AKHIR Pada penelitian ini, dapat diperhatikan alur penelitian yang dilakukan. Berikut flowchart dari penelitian ini: Start Selesai Gambar 3.1 Flowchart Penelitian Persiapan alat dan bahan Menentukan spesifikasi dan desain Pembuatan permodelan Melakukan pengujian dari hasil sorot lampu ke arah tembok Hasil akhir beserta analisa dan kesimpulan Belum berhasil
Transcript of 3. METODE PENYELESAIAN TUGAS AKHIR

14 Universitas Kristen Petra
3. METODE PENYELESAIAN TUGAS AKHIR
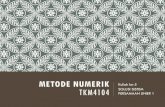
Pada penelitian ini, dapat diperhatikan alur penelitian yang dilakukan.
Berikut flowchart dari penelitian ini:
Start
Selesai
Gambar 3.1 Flowchart Penelitian
Persiapan alat dan
bahan
Menentukan
spesifikasi dan desain
Pembuatan
permodelan
Melakukan pengujian dari hasil
sorot lampu ke arah tembok
Hasil akhir beserta analisa dan
kesimpulan
Belum berhasil

15 Universitas Kristen Petra
3.1 Spesifikasi Bahan
3.1.1 Projector
Headlamp standar dari Nissan Livina masih menggunakan reflector
biasa dan pada penelitian ini digunakan sebuah projector agar sistem adaptive
headlamp dapat dilakukan. Projector yang dipilih dalam penelitian ini adalah
Projector AES G1 dengan lensa 2.8 inch, Projector universal yang dapat
digunakan pada semua kendaraan dengan tipe lampu h4 dan pada projector
ini, mekanisme lampu low beam dan lampu high beam menjadi 1 bagian.
Dimana sorot dari lampu high beam diperoleh dari pergerakan solenoid.
Gambar 3.2 Projector AES G1 Lensa 2.8 Inch
Sumber: http://img.weiku.com/a/004/277/AES_mini_Projector_lens_h1.jpg
3.1.2 Servo Motor
Servo motor digunakan sebagai penggerak utama agar projector dapat
bergerak rotasi horizontal ke arah kiri dan ke arah kanan.
Gambar 3.3 Servo Motor TowerPro MG996R
Sumber: https://img.banggood.com/thumb/water/2015/06/SKU247011-1.jpg

16 Universitas Kristen Petra
3.1.3 Regulator Adaptor
Regulator adaptor digunakan untuk menurunkan tegangan dari listrik
mobil 12v menjadi 6v. Listrik yang diperlukan untuk servo motor adalah
maksimal 6v.
Gambar 3.4 Regulator Adaptor
Sumber: https://images-amazon.com/images/I/714%2B-paz7VL_SL1200_.jpg
3.2 Alat dan Bahan
Alat dan bahan yang digunakan adalah sebagai berikut:
- Mobil Nissan Livina 2013
Gambar 3.5 Nissan Grand Livina 2013
- Tembok datar 90o sebagai bidang pengujian
Gambar 3.6 Media Pengujian Pada Tembok

17 Universitas Kristen Petra
- Maskingtape sebagai penanda
Gambar 3.7 Black Masking Tape
- Meteran besi 10 meter
Gambar 3.8 Meteran Besi 10 Meter
3.3 Rancangan Mekanisme
Gambar 3.9 Skema Rancangan Mekanisme
Perancangan mekanisme di atas bekerja dengan cara sebagai berikut:
Saat acc kontak mobil dalam posisi on/ menyala, maka regulator adaptor
akan standby dan baru akan bekerja bila saklar lampu utama dinyalakan ke posisi

18 Universitas Kristen Petra
on. Saklar ini akan mengaktifkan trigger ke relay yang akan mengalirkan listrik
ke regulator adaptor. Setelah itu regulator adaptor akan menurunkan tegangan
listrik dari 12v menjadi 6v ke rangkaian microcontroller. Input dari potensiometer
juga akan mulai terbaca apabila rangkaian microcontroller menyala. Dengan kata
lain saat mobil menyala dan lampu menyala juga, barulah semua sistem adaptive
headlamp ini bekerja.
Perancangan sistem adaptive headlamp ini memiliki 3 bagian utama, yaitu
perancangan hardware, perancangan mekanisme, dan perancangan rangkaian dan
microcontroller. Secara keseluruhan, perancangan sistem ini meliputi: mekanisme
horizontal lampu projector, motor servo, microcontroller, dan perancangan
program kerja secara keseluruhan. Berikut adalah permodelan dari sistem
rancangan:
Gambar 3.10 Rancangan Permodelan

19 Universitas Kristen Petra
3.4 Skema Kelistrikan
Gambar 3.11 Skema Kelistrikan
Beberapa komponen penyusun dalam sistem rangkaian ini adalah:
- IC Microcontroller AT89C2051
- X-Tal 24.000 Mhz
- Resistor R-pack 4K7
- Resistor 10K
- Resistor 1K
- Capasitor 10µf
- Capasitor 27pf
- Capasitor 220µf
- Capasitor 100nf
- IC ADS1100
- Potensiometer 5K ±5%
Pemrograman untuk microcontroller akan dijelaskan lebih detail pada bagian
lampiran 2.

20 Universitas Kristen Petra
Setelah melakukan perakitan rangkaian diatas, maka rangkaian akan
diaplikasikan ke mobil. Berikut adalah jalur sistem rangkaian dan kelistikan pada
sistem adaptive ini:
Gambar 3.12 Jalur Sistem Rangkaian Dan Kelistikan Pada Mobil

21 Universitas Kristen Petra
3.5 Rangka Aluminium Penyangga
Kerangka aluminium digunakan untuk chassis dari projector dan
pemilihan bahan aluminium dikarenakan konstruksi ringan dan kuat.
Gambar 3.13 Rangka Body Aluminium
Gambar 3.14 Rangka Penyangga Projector
1

22 Universitas Kristen Petra
3.6 Proses Modifikasi Pembongkaran Headlamp
Hal pertama yang dilakukan yaitu melepaskan headlamp dari mobil.
Setelah headlamp terlepas, maka dilakukan pelepasan kaca plastik dari frame
headlamp. Pelepasan part kaca dengan frame dapat dilakukan dengan
memanaskan daerah sekitar seal headlamp dengan menggunakan heatgun.
Gambar 3.15 Proses Pembongkaran Headlamp dengan Heatgun
Setelah kaca plastik dan frame terlepas, akan tersisa reflector asli mobil,
dan reflector tersebut nantinya akan dilepas dan diganti dengan frame dari
adaptive headlamp.
Gambar 3.16 Kondisi Headlamp Setelah Kaca Plastik Terlepas
Pelepasan reflector dilakukan karena pada sistem adaptive ini, reflector
sudah tidak digunakan lagi, melainkan menggunakan sebuah projector sebagai

23 Universitas Kristen Petra
pengganti pemancar cahaya. Berikut adalah gambar frame dari lampu livina
setelah reflector terlepas.
Gambar 3.17 Frame Headlamp
Setelah semua terlepas, barulah dilakukan modifikasi yaitu pemasangan frame
adaptive dari aluminium yang sudah dirancang sebelumnya dengan projector dan
lampu LED. Berikut adalah langkah – langkah pemasangan projector dan
kerangka pada frame lampu:
1. Frame lampu dilubangi terlebih dahulu untuk tempat baut dan motor servo.
Lubang yang dibutuhkan yaitu 4mm, dan lubang kotak untuk servo yaitu
41mm x 20mm
Gambar 3.18 Proses Pelubangan Frame Untuk Baut Dan Servo Motor

24 Universitas Kristen Petra
2. Setelah frame dilubangi, maka dilakukan pemasangan servo terlebih dahulu,
lalu servo dibaut dengan baut M4 dan mur M4 pada bagian bawah.
Gambar 3.19 Pemasangan Servo Motor Pada Frame Lampu
3. Langkah selanjutnya yaitu memasang kerangka body aluminium dan dibaut
dengan baut M4 dan mur M4.
Gambar 3.20 Pemasangan Kerangka Body Aluminium Frame Lampu
4. Setelah kerangka terpasang, barulah kerangka penyangga projector dipasang.
Pada sisi servo motor, kerangka penyangga projector bagian bawah hanya di
satukan dengan mur M4, karena pada servo sudah terdapat ulir M4. Pada
bagian kerangka penyangga projector bagian atas diperlukan baut dan mur M4.

25 Universitas Kristen Petra
Gambar 3.21 Pemasangan Kerangka Penyangga Projector
5. Langkah terakhir yaitu memasang projector pada kerangka penyangga
projector dengan 4 baut dan 4 mur M4.
Gambar 3.22 Pemasangan Projector Pada Kerangka
Setelah projector terpasang, barulah lampu LED juga dipasang pada projector.
Berikut adalah foto kondisi headlamp setelah dilakukan modifikasi menjadi
adaptive headlamp:

26 Universitas Kristen Petra
Gambar 3.23 Kondisi Headlamp Setelah Dilakukan Modifikasi
Setelah semuanya selesai, part kaca plastik kembali ditutup dengan
menggunakan heatgun agar seal kembali seperti semula dan semua permodelan
tersebut dipasang kembali pada mobil untuk dilakukan pengujian.
3.7 Metode Pengujian
3.7.1 Persiapan Pengujian
Pada persiapan pengujian ini hal pertama yang dilakukan adalah dengan
men-setting posisi lampu low-beam dengan kalibrasi standar internasional
(SAE J599). Kalibrasi yang dilakukan adalah dengan cara:
-Memposisikan kendaraan 7.62m (25ft.) ke arah tembok
-Bensin terisi penuh dan tekanan ban sesuai standar pabrik, yaitu 35 psi
-Beban diisikan secara umum saat mobil digunakan. Asumsi beban
adalah 2 orang dewasa pada kursi depan (160kg)
-Menyetel level ketinggian lampu pada tembok yaitu turun 101mm (4in.)
dari ketinggian lurus lampu (pada gambar 3.24 garis abu-abu)

27 Universitas Kristen Petra
Gambar 3.24 Setting Kalibrasi Headlamp Livina (SAE J599)
3.7.2 Pemasangan Rancangan Pada Mobil
Dalam melakukan pengujian pada adaptive headlamp ini, diperlukan
beberapa persiapan agar didapatkan hasil yang maksimal dalam proses ini.
Berdasarkan perancangan permodelan yang telah dilakukan, terdapat input yang
dipakai yaitu potensiometer. Potensiometer dirancangkan dan diletakkan pada
bagian bawah dashboard dan dikopelkan dengan steering shaft. Peletakan
potensio juga diberikan aluminium penyangga agar dapat didudukkan sesuai
posisinya.
Gambar 3.25 Peletakan Input Potensiometer Pada Steering Shaft

28 Universitas Kristen Petra
Dalam hal ini posisi potensiometer dan steering shaft adalah sejajar.
Potensiometer yang digunakan memiliki diameter yang berbeda dengan diameter
steering shaft. Diameter steering shaft yaitu 16,73mm. Jika langsung diberikan
belt kopel, maka kecepatan putar steering shaft dan potensiometer akan berbeda.
Maka dari itu dibuatkan pulley dari karton dengan diameter yang sama (16,73mm)
dengan steering shaft agar kecepatan putar steering shaft sama dengan
potensiometer. Belt kopel yang digunakan adalah o-ring diameter 43mm. Dengan
demikian maka saat setir digerakkan, potensiometer juga akan langsung bergerak
dengan perbandingan 1:1. Selanjutnya dilakukan pemosisian putaran potensio
agar saat setir lurus, maka posisi projector juga harus lurus. Setelah semuanya
selesai, maka permodelan lampu diaplikasikan langsung pada mobil.
Gambar 3.26 Pengaplikasian Permodelan Adaptive Pada Mobil