2 Systèmes linéaires continus et invariants
33
1/33 2SLCI.docx 2 Systèmes linéaires continus et invariants Sommaire A. INTRODUCTION - ASPECTS GENERAUX : ................................................................................... 3 1) Définition : ................................................................................................................................. 3 2) Buts et motivations : ................................................................................................................. 3 3) Bref historique : ......................................................................................................................... 3 4) Exemples d’automatismes : ...................................................................................................... 4 5) Structure d’un système asservi : ............................................................................................... 5 5.1) Constituants : ..................................................................................................................... 6 6) Régulation et poursuite:............................................................................................................ 6 6.1) Régulation : ........................................................................................................................ 6 6.2) Poursuite : .......................................................................................................................... 6 7) Définition des performances : ................................................................................................... 6 7.1) Précision statique : ............................................................................................................. 6 7.2) Précision dynamique : ........................................................................................................ 7 7.3) Stabilité :............................................................................................................................. 7 7.4) Rapidité : ............................................................................................................................ 7 B. Représentation des systèmes linéaires continus et invariants : ............................................... 8 1) Notions de systèmes dynamiques:............................................................................................ 8 1.1) Impulsion de DIRAC : .......................................................................................................... 8 1.2) Echelon : ............................................................................................................................. 9 1.3) Rampe : ............................................................................................................................ 10 1.4) Sinusoïde : ........................................................................................................................ 10 2) Systèmes linéaires continus et invariants : ............................................................................. 11 2.1) Définitions : ...................................................................................................................... 11 2.2) Modélisation par une équation différentielle : ................................................................ 12 2.3) Calcul symbolique : méthode de résolution par la transformée de LAPLACE : ............... 12 2.3.1) Définition de la transformée de Laplace : ................................................................. 13 2.3.2) Propriétés de la transformée de Laplace : ................................................................ 13 2.3.3) Représentation de quelques fonctions: .................................................................... 14 2.4) Représentation par une fonction de transfert H(p) : ....................................................... 14
Transcript of 2 Systèmes linéaires continus et invariants

1/33 2SLCI.docx
2 Systèmes linéaires continus et invariants
Sommaire A. INTRODUCTION - ASPECTS GENERAUX : ................................................................................... 3
1) Définition : ................................................................................................................................. 3
2) Buts et motivations : ................................................................................................................. 3
3) Bref historique : ......................................................................................................................... 3
4) Exemples d’automatismes : ...................................................................................................... 4
5) Structure d’un système asservi : ............................................................................................... 5
5.1) Constituants : ..................................................................................................................... 6
6) Régulation et poursuite: ............................................................................................................ 6
6.1) Régulation : ........................................................................................................................ 6
6.2) Poursuite : .......................................................................................................................... 6
7) Définition des performances : ................................................................................................... 6
7.1) Précision statique : ............................................................................................................. 6
7.2) Précision dynamique : ........................................................................................................ 7
7.3) Stabilité :............................................................................................................................. 7
7.4) Rapidité : ............................................................................................................................ 7
B. Représentation des systèmes linéaires continus et invariants : ............................................... 8
1) Notions de systèmes dynamiques:............................................................................................ 8
1.1) Impulsion de DIRAC : .......................................................................................................... 8
1.2) Echelon : ............................................................................................................................. 9
1.3) Rampe : ............................................................................................................................ 10
1.4) Sinusoïde : ........................................................................................................................ 10
2) Systèmes linéaires continus et invariants : ............................................................................. 11
2.1) Définitions : ...................................................................................................................... 11
2.2) Modélisation par une équation différentielle : ................................................................ 12
2.3) Calcul symbolique : méthode de résolution par la transformée de LAPLACE : ............... 12
2.3.1) Définition de la transformée de Laplace : ................................................................. 13
2.3.2) Propriétés de la transformée de Laplace : ................................................................ 13
2.3.3) Représentation de quelques fonctions: .................................................................... 14
2.4) Représentation par une fonction de transfert H(p) : ....................................................... 14

2/33 2SLCI.docx
2.5) Analyse temporelle expérimentale : ................................................................................ 15
2.5.1) Système du premier ordre : ...................................................................................... 15
2.5.2) Système du second ordre : ........................................................................................ 18
2.5.3) Système intégrateur : ................................................................................................ 24
2.5.4) Système dérivateur : ................................................................................................. 25
3) REPRESENTATION PAR SCHEMAS-BLOCS : .............................................................................. 26
3.1) Schémas fonctionnels :..................................................................................................... 26
3.1.1) Formalisme : .............................................................................................................. 26
3.1.2) Règles sur les schémas blocs : ................................................................................... 26
3.2) Cas des systèmes bouclés : .............................................................................................. 27
4) Réponse fréquentielle, diagrammes de Bode : ....................................................................... 28
4.1) Cas d’un système du premier ordre. ................................................................................ 28
4.1.1) Diagramme de Gain : ................................................................................................. 29
4.1.2) Diagramme de phase : .............................................................................................. 30
4.2) Cas d’un système du deuxième ordre : ............................................................................ 31
4.2.1)Diagramme de gain : .................................................................................................. 31
4.2.2) Diagramme de phase : .............................................................................................. 33

3/33 2SLCI.docx
A. INTRODUCTION - ASPECTS GENERAUX :
1) Définition : L’automatique est un ensemble de théories mathématiques et une technique de raisonnement
qui concerne la prise de décision et la commande des systèmes1.
2) Buts et motivations : Les systèmes automatiques permettent avant tout de réaliser des opérations qui ne peuvent
pas être confiées à l’homme, pour différentes raisons. Parmi celles-ci :
la précision (nécessairement limitée dans le cas de l’intervention humaine)
le caractère pénible, voire impossible, de tâches à effectuer dans certains
environnements.
la complexité : à partir d’une certaine échelle (grand nombre de paramètres) la
commande manuelle n’est plus envisageable.
la répétitivité de tâches dénuées d’intérêt.
la recherche d’une diminution des coûts par l’augmentation des rendements : en
particulier la robotisation permet de diminuer notablement la part relative de la main
d’œuvre dans le prix de revient.
la recherche de performances élevées...
3) Bref historique : L’histoire des systèmes automatiques peut se diviser en trois époques :
la première époque : elle s’étend de l’antiquité au milieu du 19ème siècle.
Dès 250 Avant J.C. nous avons des exemples de régulation de niveau par exemple,
l’horloge automatique à eau de KTESYBIOS la Clepsydre.
La hauteur h est maintenue égale à la hauteur de
consigne (qui correspond à la position du flotteur
bouchant la canalisation C); En conséquence, le débit
d, et donc la vitesse v sont constants au cours du
temps : h' donne une image du temps.
1 Définition du mot système : « une combinaison de parties qui se coordonnent pour concourir
à un résultat ».

4/33 2SLCI.docx
Un autre exemple de régulateur très connu est le régulateur à boules de WATT (1788)
qui permet de maintenir constante la vitesse de la turbine.
la seconde époque est caractérisée par la théorie du bouclage (fin du 19ème) et les
applications de l’algèbre de BOOLE. Puis l’approche fréquentielle de NYQUIST, BODE,
BLACK... vers 1945.
la troisième époque (depuis 1950) est caractérisée par :
o L’introduction de la représentation d’état, particulièrement bien adaptée à
l’utilisation des calculateurs numériques pour l’étude et la commande des
systèmes complexes et multi variables,
o Le développement des méthodes d’étude des systèmes non linéaires et des
systèmes échantillonaires.
4) Exemples d’automatismes : Nous sommes entourés d’un grand nombre de systèmes automatiques dans notre vie
quotidienne, du simple programmateur d’une machine à laver (automatisme séquentiel) au
robot de soudure ou de peinture.
Il existe deux grandes familles de systèmes automatiques.
Les systèmes logiques : (combinatoires et/ou séquentiels).
Les systèmes logiques sont des systèmes qui ne traitent que des données logiques
(0/1, vrai/faux, marche/arrêt...)
Les systèmes asservis :
Un système asservi est un système qui prend en compte durant son fonctionnement
l’état de ses sorties pour le modifier.
Par exemple : régulation de température d’une pièce, régulation de la vitesse d’un moteur,
suivi de trajectoire d’une fusée.

5/33 2SLCI.docx
5) Structure d’un système asservi : L’objectif d’un système automatisé étant de remplacer l’homme dans une tâche, pour établir
la structure d’un système automatisé, commençons par étudier le « fonctionnement » d’un
système dans lequel l’homme est la partie commande.
Par exemple :
Un conducteur au volant d’un véhicule.
Le conducteur doit suivre la route, pour cela :
il observe la route et son environnement et
mesure la distance qui sépare son véhicule
du bord de la route ;
il détermine en fonction du contexte l’angle
qu’il doit donner au volant pour suivre la
route ;
il agit sur le volant (donc sur le système)
puis de nouveau il recommence son observation tout le temps que le véhicule
roule.
Si un coup de vent dévie le véhicule, après avoir observé et mesuré l’écart il agit pour
s’aligner de nouveau avec sa trajectoire initiale.
On peut donc définir la structure du fonctionnement par le schéma suivant :
Un tel système nous montre la structure des systèmes asservis qui possède deux chaînes :
une chaîne directe, ou chaîne d’action, qui met en jeu une puissance
importante
une chaîne de retour, ou chaîne d’information.
On appelle ce type de schéma, un schéma bloc du système automatique.
REFLEXION
Comparaison/calcul
ACTION SYSTEME
OBSERVATION
mesure
Valeur
souhaitée
Effet de
l’action
Perturbations

6/33 2SLCI.docx
5.1) Constituants :
Partie commande ou régulateur :
Le régulateur se compose d’un comparateur qui détermine l’écart entre la
consigne et la mesure et d’un correcteur qui élabore, à partir du signal d’erreur
, l’ordre de commande.
Actionneur :
C’est l’organe qui apporte l’énergie au système pour produire l’essai souhaité.
Il est en général associé à un pré-actionneur qui permet d’adapter l’ordre
(basse puissance) et l’énergie.
Capteur :
Le capteur prélève sur le système la grandeur réglée (information physique) et
la transforme en un signal compréhensible par le régulateur. La précision et la
rapidité sont deux caractéristiques importantes du capteur.
6) Régulation et poursuite:
6.1) Régulation : La régulation a une entrée de référence (appelée aussi consigne), généralement
constante ou variant par paliers, déterminée par un opérateur ou par exemple, un
programme d’automate.
6.2) Poursuite : La poursuite a une entrée de référence qui suit une grandeur physique, elle est donc
variable et indépendante directement des consignes de l’opérateur. Exemple : suivi de
trajectoire.
7) Définition des performances :
7.1) Précision statique : Dans le cas où la consigne est constante on définira la précision statique comme la différence entre la sortie demandé et la sortie obtenue.

7/33 2SLCI.docx
7.2) Précision dynamique :
La précision dynamique caractérise l’erreur avec laquelle la sortie suit la consigne d’entrée imposée au système. L’erreur peut-être constante, nulle ou tendre vers l’infini.
7.3) Stabilité : On dit qu’un système est stable si pour une entrée constante, la sortie reste constante
quelles que soient les perturbations.
7.4) Rapidité : La rapidité caractérise le temps mis par le système pour que la sorite atteigne sa
nouvelle valeur.
On définit, pour caractériser la rapidité, le temps de réponse à 5% (t5%), c’est le temps
mis par le système pour atteindre sa valeur finale à 5%.

8/33 2SLCI.docx
B. Représentation des systèmes linéaires continus et invariants :
1) Notions de systèmes dynamiques: On appelle système dynamique, un système dont l’étude prend en compte les
phénomènes d’inertie (inertie mécanique, thermique...). Les grandeurs de sortie
dépendent des valeurs présentes et passées des grandeurs d’entrées.
Les signaux d’entrée e(t) sont des fonctions du temps. Nous faisons l’hypothèse qu’ils ne
sont pas aléatoires ; on connaît leurs causes. C’est-à-dire e(t < 0) = 0.
Généralement on forme les grandeurs d’entrées ainsi :
e(t) = f(t).u(t)
u(t) est appelée fonction existence, elle est telle que :
u(t) =1 pour t 0
u(t) = 0 pour t < 0
Cette combinaison (f(t).u(t)) permet d’annuler e(t) pour les temps négatifs.
On distingue quatre entrées types qui permettent de définir tour à tour les principaux
critères de performance d’un système :
1.1) Impulsion de DIRAC : Ce signal noté (t) est une impulsion
brève qui vaut 0 en tout point sauf au
voisinage de t = 0 s. L’impulsion de
DIRAC est alors définie par :
0
0)(1)(lim *
t
t t t
Donc e(t) = (t)
SYSTEME
DYNAMIQUE
e(t) s(t)
Perturbations
Grandeurs d’entrée
ou
commande (consigne)
Grandeurs de sortie
ou
observations (réponse)

9/33 2SLCI.docx
Réponse à une entrée impulsionnelle :
Cet essai permet de tester les
performances du système face à des
perturbations brèves et d’observer sa
stabilité, c’est-à-dire de voir si la réponse
du système ne s’écarte pas
définitivement de sa position.
1.2) Echelon : Cette fonction est définie de la
manière suivante :
e(t) = A.u(t)
A étant une constante positive.
Encore connu sous le nom de fonction
d’Heaviside l’échelon peut être
unitaire dans ce cas il se note :
e(t) = 1.u(t)
Réponse à l’entrée échelon :
Dans le cas d’une entrée en
échelon l’erreur permanente
)(ts s’appelle écart statique ou
précision : c’est l’écart entre la
valeur du signal d’entrée et la
réponse S(t) en régime définitif
)( t plus cet écart sera
faible, plus le système sera
précis.
On peut également juger de la
rapidité du système en
mesurant le temps (t5%) au bout
duquel la réponse ne s’écarte
plus que de ±5% de la valeur
finale s() valeur asymptotique.
t
e(t) s(t)
Précision

10/33 2SLCI.docx
1.3) Rampe : L’évolution d’un signal e(t) en rampe est
donné ci-contre. Ce signal évolue
linéairement avec le temps pour t>0.
A.t.u(t)te )(
Réponse à une entrée rampe
Cet essai permet d’évaluer les
capacités du système à suivre une
consigne variable. L’erreur
permanente mesurée s’appelle erreur
de suivi ou erreur de traînage. Elle est
notée : )(tt .
1.4) Sinusoïde : Les entrées sinusoïdales sont très utilisées
pour étudier le comportement dynamique
des systèmes. La sortie est appelée :
REPONSE HARMONIQUE.
Un signal sinusoïdal tete sin)( 0 est
caractérisé par son amplitude e0 et par sa
pulsation .
Sa fréquence f est telle que : =2..f
Sa période T vaut : T=2./
Réponse à une entrée sinusoïdale :
La réponse est sinusoïdale, de même période
avec une amplitude s0 et un déphasage
(correspondant à une erreur de suivi).
Cet essai permet en particulier d’étudier la stabilité d’un système.
e(t) s(t) t
déphasage

11/33 2SLCI.docx
2) Systèmes linéaires continus et invariants :
2.1) Définitions : Système linéaire :
Un système linéaire est un système pour lequel les relations entre les grandeurs
d’entrée et de sortie peuvent se mettre sous la forme d’un ensemble d’équations
différentielles à coefficients constants.
Les systèmes linéaires se caractérisent principalement par 2 propriétés : la
proportionnalité et l’additivité.
proportionnalité :
Si y(t) est la réponse à l’entrée x(t) alors A.y(t) est la réponse à A.x(t).
(Ceci est vrai que lorsque le système a atteint sa position d’équilibre ou
que le régime permanent s’est établi).
La caractéristique d’un système linéaire est une droite :
Le rapport Ktx
ty
)(
)( est appelé GAIN du système
La réponse, en régime définitif, d’un système linéaire à une entrée donnée
est un signal de même nature que l’entrée :
o si btKat
tytatx
.)(lim.)(
o si )sin(.)(lim)sin()( 00
txKt
ty txtx
additivité (superposition):
Si y1 est la réponse à x1(t), si y2(t) est la réponse à x2(t), alors la réponse à
x1(t)+x2(t) est y1(t)+y2(t)
Système continu :
Un système est continu, si, à toutes les entrées x(t) quel que soit t il délivre la sortie
y(t).
Système invariant :
Un système est invariant, s’il garde le même comportement au cours du temps (pas de
détérioration de ses caractéristiques par exemple).
x1(t)+ x2(t) y (t)= y1(t)+y2(t) Système linéaire

12/33 2SLCI.docx
2.2) Modélisation par une équation différentielle : Pour étudier ou concevoir la commande d’un système automatique, il est nécessaire
de commencer par le modéliser d’un point de vue mathématique; c’est à dire qu’il faut
déterminer la relation qui existe entre la variable de commande x(t) et la grandeur
souhaitée en sortie y(t) (on se limite ici aux systèmes monovariables; une seule entrée,
une seule sortie).
Le modèle mathématique d’un système linéaire, continu et invariant s’écrit sous la
forme d’une équation différentielle à coefficients constants avec second membre du
type :
)()()()()(...)( 0101 txatxdt
datx
dt
datybty
dt
dbty
dt
db
m
m
mn
n
n
En général m<n et n est appelé : ordre du système
Il existe une méthode qui permet de résoudre simplement de telles équations
différentielles en les transformant en simples équations algébriques, cette méthode
s’appelle TRANSFORMEE DE LAPLACE.
2.3) Calcul symbolique : méthode de résolution par la
transformée de LAPLACE : La méthode classique de résolution d’équations différentielles avec second membre se
décompose en deux temps :
Il faut d’abord considérer l’équation sans second membre et la résoudre,
ensuite, il faut trouver une solution particulière pour trouver la solution finale.
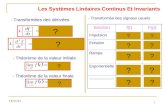
Voici maintenant les étapes d’une résolution par la transformée de LAPLACE.
Equation différentielle
avec second membre
(paramètre t)
TRANSFORMEE DE
LAPLACE (paramètre p)
Fraction
polynomiale
en p
Fraction
décomposée en
éléments simples
en p
TRANSFORMEE INVERSE DE
LAPLACE (paramètre t) Solution finale
(paramètre t)

13/33 2SLCI.docx
2.3.1) Définition de la transformée de Laplace :
On appelle transformée de Laplace de la fonction f(t), supposée nulle pour t<0
la fonction F(p) définie par :
0
)()())(( pFdttfetfL pt
L(f(t)) se lit « Laplacien de la fonction f(t) ».
2.3.2) Propriétés de la transformée de Laplace :
Unicité : La transformée F(p) de la fonction f(t) est unique et
réciproquement.
Linéarité :
g(t))L+f(t))L=g(t))+f(t)L( et ((
Transformée d’une dérivée :
o Dérivée première : )0()()(
fpFp
dt
tdfL
o Dérivée seconde :
dt
dffppFp
dt
tfdL
)0()0()(
)( 2
2
2
Transformée d’une intégrale :
p
g
p
pFpG
gpGpdt
dg(t)L,
dt
dg(t)=f(t) sitfLpF
)0()()(
)0()())(()(
Théorème du retard : )()( pFetfL p
Théorèmes aux limites :
- Théorème de la valeur initiale :
+p t
pFp tf
0
)(lim)(lim
- Théorème de la valeur finale : 0
)(lim)(lim
p +t
pFp tf

14/33 2SLCI.docx
Nota : Le théorème de la valeur initiale ne s’applique que si le degré du numérateur de p.F(p) est inférieur ou égal au degré du dénominateur. Le théorème de la valeur finale peut s’appliquer si les pôles de p.F(p) sont à partie réelle strictement négative.
On appelle pôles d’une fonction )(
)()(
pD
pNpH les racines de l’équation
D(p)=0. Autrement dit : les pôles sont les valeurs qui annulent le dénominateur de H(p).
- Remarques :
Si les conditions initiales sont nulles (conditions dites de Heaviside) :
Dériver dans le domaine temporel revient à multiplier par p dans le
domaine de Laplace.
Intégrer dans le domaine temporel revient à diviser par p dans le
domaine de Laplace.
Le domaine de Laplace est aussi appelé domaine symbolique.
Quand F(p) est la transformée de Laplace de f(t), que l’on note : F(p)= L(f(t)),
On appelle transformée de Laplace inverse ou original de F(p) la fonction
f(t)=L-1(F(p)).
Si f(t) est définie par une équation différentielle d’ordre n , F(p) est définie
par un polynôme de degré n.
2.3.3) Représentation de quelques fonctions:
Voir annexe 1.
2.4) Représentation par une fonction de transfert H(p) : Nous avons vu précédemment que la relation entre l’entrée x(t) et la sortie y(t) d’un
système linéaire est donnée par une équation différentielle du type :
)()()()()(...)( 0101 txatxdt
datx
dt
datybty
dt
dbty
dt
db
m
m
mn
n
n
Recherchons la transformée de Laplace de cette équation en appliquant l’opérateur L
à chacun des deux membres. Nous noterons respectivement X (p) et Y (p) les
transformées des fonctions x(t) et y(t) :
X (p)= L (x (t)) et Y (p) = L (y (t))
Après transformation, on obtient, si les conditions initiales sont nulles :
)(.)(.....)(..)(.)(.....)(.. 0101 pXapXpapXpapYbpYpbpYpb mm
nn
La transformée de la sortie s’exprime alors sous la forme :
)(......
.....)(
01
01pX
bpbpb
apapapY
nn
mm
Nous pouvons alors former le rapport de la "sortie" Y (p) sur "l’entrée" X (p), ce
rapport correspond à la fonction transfert du système appelée H (p).

15/33 2SLCI.docx
)(
)(
.....
.....
)(
)()(
01
01
pD
pN
bpbpb
apapa
pX
pYpH
nn
mm
Sous cette forme c’est une fonction rationnelle en p. Si on explicite les racines
(complexes) des polynômes du numérateur N (p) et du dénominateur D (p), la
fonction de transfert s’écrit :
))...(()(
))....(()(
)(
)()(
21
21
n
m
pppppp
zpzpzpK
pX
pYpH
o Les zi sont les zéros de la fonction transfert, les pi sont les pôles de la fonction
transfert.
o Le degré n du dénominateur D (p) est appelé ordre de la fonction transfert H (p).
o K est appelé le gain statique.
Si p
KpH )(lim lorsque 0p , le nombre 0 est appelé classe de la fonction
transfert.
2.5) Analyse temporelle expérimentale :
2.5.1) Système du premier ordre :
Un système du premier ordre est régi par une équation différentielle du
premier ordre du type :
)()(
)( teKdt
tdsts
d’où après transformation de Laplace si les conditions initiales sont nulles :
)(1
)( pEp
KpS
d’où :
p
K
pE
pSpH
1)(
)()(
(forme canonique)
où :
K est appelé le gain statique du système,
est appelée constante de temps du système,
K et sont appelés les paramètres caractéristiques de H(p).

16/33 2SLCI.docx
Réponse à un échelon :
p
K
p
A= S(p)oùd
p
ApEtuAte
.1')()()(
Après décomposition en
éléments simples:
ppKApS
.1
1)(
On obtient donc après
transformation de Laplace
inverse :
)1()(
t
eKAts
Analyse temporelle :
- Recherche du temps de réponse à 5% :
s(t5%) = 0.95.A.K
e1KAKA9505t
)(.%
donc .35%t
- Recherche de la précision statique s(t) :
La précision statique est définie par
t
tste ts
))()((lim)(
Pour calculer cette limite on peut passer dans le domaine symbolique
de Laplace et utiliser le théorème de la valeur finale :
0
)(lim)(lim
p +t
pFp tf donc
0
))()(.(lim(lim
p +t
pSpEp s(t))-e(t)
Pour un système du premier ordre :
)()(
)( teKdt
ts dts soit dans le domaine symbolique :
)(.)(..)( pEKpSppS (rappel C.I. nulles)
e(t)= A.u(t)
A.K 0.95.A.K
0.63.A.K

17/33 2SLCI.docx
Pour une entrée échelon (e(t)=A.u(t)) on rappelle que p
ApE )(
donc :
0
).1
(lim
0
))()((lim)(
p
p
A
p
K
p
Ap
p
pSpEpts
donc
0
).1
1(lim)(
p
p
KA ts
Finalement : KAts 1)(
Nota : cette erreur est finie et elle s’annule pour K=1.
Réponse à une rampe :
p
K
p
A = S(p)oùd
p
A=E(p) tutAte
2
2
.1'
)()(
Après décomposition en éléments
simples :
pppKApS
.1
1)(
2
2
On obtient donc après
transformation de Laplace inverse :
).()( t
etKAts
Analyse temporelle :
- Recherche de l’erreur de traînage (ou de suivi) )(tt .
t
tstett
))()(lim()(
On utilise la même démarche que celle employée pour la
détermination de )(ts .
p
KE(p).pSpE
.11)()(
A.
A.K

18/33 2SLCI.docx
ici 2
)(p
ApE
donc :
p
K
p
AS(p))-E(p)p.
p
K
p
A=S(p)-E(p)
2 .11(
.11
0
.11lim
)(
p
p
K
p
A
tt
si K = 1 At t )(lim
si K<1 )(lim t t
si K>1 )(lim t t
2.5.2) Système du second ordre :
Un système du second ordre est régi par une équation différentielle du second
ordre du type :
)(.)(1)(2
)(2
2
2teK
dt
tsd
dt
tdsats
nn
Les paramètres caractéristiques sont alors :
K : le gain statique
a : le coefficient d’amortissement du système (noté aussi , z ou m)
n : la pulsation propre du système non amorti (rad/s)
Cette équation différentielle a pour image dans le domaine symbolique (pour
les conditions de Heaviside C.I. = 0)
)(
12
²
p²
K=S(p)
: aussi
)(²2²
²)(
)(.²
²2²)(
)(.²²
121)(
)(.)(²²
1)(
2)(
n
pE
pa
ou
pEpap
KpS
pEKpa
pS
pEKppa
pS
pEKpSppSpa
pS
n
nn
n
n
nn
nn
nn

19/33 2SLCI.docx
Donc la forme canonique de la fonction transfert d’un système du second
ordre s’écrit :
1.21
)(2
2
pa
p
KpH
nn
Réponse à un échelon :
²)2²(
²
.12
²
)()(nn
n
nn
papp
KA=ou S(p)
ppap²
AK=où S(p)d'
p
A=E(p) tuAte
Avant de trouver une décomposition, recherchons les racines de l’équation :
0²2² nn pap
)1²(²4 an
Trois cas sont à distinguer :
a>1 >0 2 racines réelles :
)1²(p )1²( 21 aaaap nn
a=1 =0 une racine double :
np
a<1 <0 2 racines complexes conjuguées :
)²1(p )²1( 121 ajapajap nn
Etudions la réponse du système pour les trois cas :
Cas où a>1 : régime apériodique :
La réponse est de la forme : )2(
)(22
2
ppap
KApS
nn
n
)()()(
21
2
ppppp
KApS n
avec :
)1(
)1(
2
2
2
1
aap
aap
n
n
On pose 1
1
1
p et
2
2
1
p
Alors S (p) s’écrit :
)1()1()(
)1()1(
)(21
21
2
21
21
2
ppp
pp
KA
pS
p
p
p
pp
pp
KA
pS
nn

20/33 2SLCI.docx
Or 2
21 npp donc S(p) prend la forme :
)1()1()(
21 ppp
KApS
Après transformation inverse il vient :
21
21
12
)(
tt
eeK
KAts
1 et 2 sont les constantes de temps du système.
Cas où a = 1 : régime apériodique critique :
La réponse est de la forme : )².1(
)(pp
KApS
Après transformation inverse, il vient :
tt
et
eKAts 1)( Avec
pn
11
Représentation graphique
pour a>1 et K<1
e(t)= A.u(t)
A.K
Représentation graphique
pour a=1 et K>1 e(t)= A.u(t)
A.K

21/33 2SLCI.docx
Cas où a<1 : régime oscillatoire
La réponse est de la forme : ²)2²(
²)(
ppap
KApS
nn
n
Après transformation inverse, il vient :
)²sin(²
)(
ta1a1
e1KAts n
ta n
avec cos = a et ²1sin a
Le comportement d’un tel système est oscillant et amorti. Voici l’allure de la
réponse de ce système à un échelon.
Analyse temporelle :
- erreur statique :
KAp
S(p))-(E(p)p
t
tste ts
1
0
lim))()((lim)(
On a 0)( ts si et seulement si K=1
De la même manière qu’un système du premier ordre, un second ordre ne
possède pas d’erreur de position si son gain statique est égal à 1.
A.K e(t)= A.u(t)
Représentation graphique
pour a<1 et K=1

22/33 2SLCI.docx
- temps de réponse à 5% :
Contrairement aux systèmes du premier ordre, on ne sait pas exprimer
d’une manière générale la valeur du temps de réponse par une expression
analytique.
Généralement on procède à la recherche du temps réponse à l’aide de
l’abaque ci-dessous :
Nota : la meilleure performance est obtenue pour une valeur de a environ
égale à 0.7.
- Dépassements en régime transitoire :
Si la réponse à un échelon est telle que temporairement, elle dépasse sa
valeur finale, on introduit les valeurs suivantes pour qualifier le régime
transitoire.
Le dépassement est égal au
rapport D/K, on l’exprime en % de
K. Pour la figure ci-dessus K=1;
a=0.2 et n = 10 rad/s, on trouve
D1= 50% ; D2 = 30% etc...
a

23/33 2SLCI.docx
De façon générale
21
..
)1( a
ka
k
k eKD
pour un échelon unitaire.
Pour D1 on pose k=1, pour D2 k=2 etc.…
Nota : On remarque un fait important pour a = 0,7, il n’y a qu’un seul
dépassement et il est faible (<5%)
Réponse à une rampe :
²)2²²(
²)(
)()(
nn
n
papp
KApS
p²
A=E(p) tutAte
- erreur de traînage :
0
lim))()((lim)(
p
S(p))-(E(p)p
t
tste tt
Or
²)2²²(
²
²))()(.(
nn
n
papp
KA
p
AppSpEp
²2²
)1²(2²))()((
nn
nn
pap
Kpap
p
ApSpEp
Donc
²2²
)1²(2²lim)(
0 nn
nn
pt
pap
Kpap
p
A t
Il faut considérer trois cas :
si K > 1 )(t t
si K = 1 n
t
aAt
2)(
si K < 1 )(t t

24/33 2SLCI.docx
2.5.3) Système intégrateur :
Un système intégrateur est régi par une équation différentielle du premier
ordre du type :
)(.)(
tekdt
tdsv ou dttekts
t
v 0
)(.)( ou dttets
t
i
0
)(.1
)(
kv étant ici une constante réelle de dimension s-1 et est appelée constante de
vitesse.v
ik
1 est nommée constante de temps d’intégration.
Pour les conditions initiales nulles, la forme canonique de la fonction transfert
s’écrit :
p.S(p)=kv. E(p) donc : p
k
pE
pSpH v
)(
)()(
Réponse à un Dirac :
e(t) = (t) et L( (t) )= E(p) =1 donc :
)(tkdt
s(t)dv
et dans le domaine symbolique cette équation
s’écrit :
vkpSp )(. donc p
kpS v)( d’où après
transformation inverse il vient :
s(t) = kv
Réponse à un échelon :
e(t) = A.u(t) et L(A.u(t)) =E(p) = p
A donc :
)(tuAkdt
s(t)dv et dans le domaine symbolique
cette équation s’écrit : p
AkpSp v )( donc :
2)()(
p
AkpS
p
A
p
kpS v
v d’où après
transformation inverse il vient :
s(t) =kv. A .t
A.kv
kv
s(t)

25/33 2SLCI.docx
2.5.4) Système dérivateur :
Un système dérivateur est régi par une équation différentielle du premier
ordre du type :
dt
te dts d
)(.)(
La constante d, ayant la dimension [s], est nommée la constante de temps de
dérivation.
Pour les conditions initiales nulles la forme canonique de la fonction transfert
s’écrit :
)()( pEppS d donc : p
pE
pSpH d
)(
)()(
Réponse à un échelon :
e (t) = A.u(t) et L(A.u(t)) =E(p) = p
A donc :
dt
tuAdts d
))(()(
et dans le domaine symbolique
cette équation s’écrit :
p
AppSou pEppS dd )()()( donc :
dApS )( d’où après transformation inverse il vient :
)()( tAts d
t
A.d

26/33 2SLCI.docx
3) REPRESENTATION PAR SCHEMAS-BLOCS :
3.1) Schémas fonctionnels : Les systèmes linéaires continus sont souvent représentés par des schémas fonctionnels
(schémas blocs).
Le système d’équations est remplacé par un ensemble de blocs représentant les
fonctions du système.
3.1.1) Formalisme :
- le bloc :
Il possède une entrée et une sortie. Il est à noter que
les flèches sont toujours orientées de l’entrée vers la
sortie.
S (p) = H (p) .E (p)
- les sommateurs :
Ils sont multi entrées mais ne possèdent qu’une sortie.
Les entrées sont affectés du signe plus pour une entrée
positive et du signe moins pour une entrée négative.
ici :
S (p) = E1 (p) + E3 (p) - E2 (p)
- Cas du comparateur :
C’est un sommateur qui permet de faire la différence de
deux entrées (de comparer) .Ici :
S (p) = E1 (p) - E2 (p)
- La jonction :
La branche de prélèvement (2) a le même signal que la
branche principale (1) et n’affecte pas celui-ci.
3.1.2) Règles sur les schémas blocs :
En série :
En parallèle :
H
E(p) S(p)
+
+ -
E1 (p)
E2 (p)
E3 (p)
S (p)
+ -
E1 (p)
E2 (p)
S (p)
X (p) X (p)
X (p)
(1)
(2)
Point de prélèvement

27/33 2SLCI.docx
Déplacement du point de prélèvement
Déplacement du sommateur :
3.2) Cas des systèmes bouclés : Les schémas blocs des systèmes asservis possèdent une structure en boucle fermée
comme représentée ci-dessous :
Cette structure fait apparaître quatre éléments essentiels :
Un comparateur, une chaîne directe, une jonction et une chaîne de retour.
H(p) est la fonction transfert de la chaîne directe et G(p) est la fonction transfert de la
chaîne de retour.
On en déduit la Fonction de Transfert en Boucle Fermée (FTBF) F(p) :
S (p) = H (p). [E (p) - G (p). S (p)]
S (p). [1 +H (p).G (p)] =H (p).E (p)
Soit )()()(1
)()( pFTBF
pGpH
pHpF
Chaîne de retour
Jonction Comparateur
Chaîne directe

28/33 2SLCI.docx
On utilisera également la Fonction de Transfert en Boucle Ouverte (FTBO), c'est la
fonction de transfert du système avec ouverture de la boucle de retour au niveau du
comparateur, les deux sous-systèmes sont alors en cascade:
FTBO(p) = H(p).G(p)
Le comportement d'un système en boucle fermée se déduira du comportement en
boucle ouverte.
Cas du retour unitaire : G (p)= 1
)(1
)()(
pH
pHpF
Un système asservi se ramène facilement à un système à retour unitaire :
4) Réponse fréquentielle, diagrammes de Bode :
4.1) Cas d’un système du premier ordre. Remplaçons la variable de Laplace p par le nombre complexe j dans l’expression de la
fonction transfert. Pour un système du premier ordre de fonction transfert H(p), on
obtient la fonction complexe :
j
KHjH
1)(

29/33 2SLCI.docx
Dans le cas des diagrammes de Bode, deux tracés (fonction de )(log10 ) sont à
considérer.
diagramme de gain : tracé à partir de : HdBG 10log20)( (exprimé en
Décibel (dB))
diagramme de phase : tracé à partir de l’argument de H
4.1.1) Diagramme de Gain :
jKj
KdBG
1log20log20
1log20)( 101010
²1log20log20)( 2
1010 KdBG
à partir de cette égalité deux cas sont à considérer :
lorsque 122 cas de pulsations faibles :
G (dB) tend vers une constante :
G(dB) 20.log K = Cte,
Donc G (dB) tend vers une droite horizontale d’ordonnée 20 log K.
lorsque 122 cas de pulsations fortes :
G (dB) 20 log K - 20 log
G (dB)
droite
C
K
te
log20log20
G(dB) tend asymptotiquement vers une droite de pente négative: -20 dB/décade.
(La pente est exprimée par décade, une unité de l’axe des pulsations
correspondant à une puissance de 10 de ces mêmes pulsations).
L’intersection des deux droites s’effectue en un point de pulsation C tel que :
c K K log20log20log20log20
1log20log20 CC
Cette pulsation est appelée pulsation de cassure ou de coupure.

30/33 2SLCI.docx
Diagramme asymptotique de gain :
Ce diagramme donne une bonne idée de la courbe de réponse en pulsation.
pour les pulsations faibles : droite 20 log K
pour les pulsations élevées : droite de pente - 20 dB/décade.
4.1.2) Diagramme de phase :
La phase est donnée par l’argument de H :
)arctan()arctan(0)1(arg)arg()(
1arg)(arg)(
j K
j
KH
Deux cas sont à distinguer :
lorsque
1
cas de pulsations faibles :
Cela revient à calculer )(lim lorsque 0
0)0arctan(0
lim
() = arctan(0) = 0
lorsque
1
cas de pulsations fortes :
Cela revient à calculer )(lim lorsque
2)arctan(
lim
(ou -90°)
Cas de la pulsation de coupure = c =1/ :
4
)1arctan(
c ( ou -45°)
1c
G(dB)
log
-20 dB/décade
20 log K
0

31/33 2SLCI.docx
Diagramme asymptotique de phase :
Le diagramme asymptotique à la forme d’une marche d’escalier avec un saut
de déphasage à la pulsation de coupure c.
4.2) Cas d’un système du deuxième ordre : Pour un système du second ordre de fonction transfert H(p), on obtient la fonction
complexe :
²12
12
nn
ja
KH
En mettant le dénominateur sous la forme a+j.b on obtient :
nn
aj
KH
2²
12
4.2.1)Diagramme de gain :
Nota : On pose habituellement : n
u
; u étant appelée pulsation réduite.
uu
uaj
KH
21 2
Le gain G s’exprime en décibel (dB) : H dBG log20)(
Autrement dit :
)²2()²1(log20log20)²2()²1(
log20)( 2
2 uu
uu
a K a
K dBG
1c
log
°()
-90°
-45°

32/33 2SLCI.docx
Deux cas sont à étudier :
Lorsque 1u cas des pulsations faibles :
u tend vers 0 : teCK dBG log20)(
G(dB) tend vers une droite horizontale d’ordonnée K log20
Lorsque 1u cas des pulsations fortes :
u tend vers l’infini et 42 )²2()²1( uuu a
u 40 20)( LogKLogdBG
G(dB) tend asymptotiquement vers une droite de pente négative.
La pente est de : - 40dB/décade
L’intersection des deux droites s’effectue en un point tel que :
ncucuc = K K 1log40log20log20
Diagramme asymptotique de gain :
- pour les pulsations faibles : droite 20 log K
- pour les pulsations autour de n la valeur de l’amplitude dépend de a
(résonance ou non : pour plus d’information voir le cours de physique)
- pour les pulsations plus élevées : droite de pente -40dB/décade.
Nota :
Lorsque 2
2a , G(dB) passe par un maximum.
Il a lieu pour 2.21 anr r est appelée pulsation de résonance.
Ce maximum vaut :
dB)(en )1..2log(20log20)(
1..2log20)(
2
2
aaKG
aa
KG
r
r
nc
G(dB)
log
-40 dB/décade
20 log K
0

33/33 2SLCI.docx
Le coefficient de surtension est défini par :
)1..2log(20)(ou 1..2
1 2
2aadBQ
aaQ
4.2.2) Diagramme de phase :
La phase est donnée par l’argument de H
uu
uaj
K
2)1(arg
2
uuu ajK 2)1(arg)arg( 2
21
2arctan
u
uu
a
Deux cas sont à considérer :
Si 1u cas des pulsations faibles :
0)0arctan(
0
lim
u
u
Si 1u cas des pulsations fortes :
)0()0arctan(
lim
k
u
u
fonction définie à k près, pour des raisons de continuité du signal
on prendra ici k=1 donc :
)0arctan(
lim
u
u
Cas de la pulsation de coupure :
Lorsque 1u 2
u
Diagramme asymptotique de phase :
Le diagramme asymptotique à la forme d’une marche d’escalier avec un saut
de déphasage à la pulsation propre non amortie n.
nc
log
°()
-180°
-90°