
1 SENKRON MOTORLAR -...
21
SENKRON MOTORLAR 1
Transcript of 1 SENKRON MOTORLAR -...

SENKRON MOTORLAR1

Senkron Motorların Çalışma Prensipleri
Senkron makine generatör olarak çalıştırılabildiği gibi, eğer kutuplar bir DC kaynaktan
beslenip, endüvi (stator) sargılarına da alternatif gerilim uygulanırsa bu kez senkron motor olarak
çalışır. Ancak senkron motorların diğer motorlar gibi (asenkron motor, DC motor) direk olarak
kalkınmaları mümkün değildir.
2
SENKRON MAKİNELER – Senkron Motor Çalışma Prensipleri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

Senkron Motorun Kalkınma Durumu
İki kutuplu senkron motorun stator sargıları 50Hz’ lik üç fazlı bir sisteme bağlandığında stator
döner alanı 3000d/d (314 rad/s)’ lik bir senkron hızla saat ibresi yönünde döner. Rotorda bulunan kutup
sargıları da enerjilenince rotor da kutuplandırıldığı için rotora saat ibresi yönünde dönme momenti 𝑻uygulanır. Ancak rotorun ataletinden dolayı rotor hızı ani olarak 314 rad/s’lik hıza çıkamaz.
SENKRON MAKİNELER – Senkron Motor Çalışma Prensipleri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Stator döner alanı yarı saykılı tamamladığında stator
kutuplarının polaritesi değişeceğinden rotora uygulanan
momentin yönü saat ibresinin ters yönünde iken stator döner
alanı halen saat ibresi yönünde dönmeye devam eder.
Neticede bir saykıllık süre içerisinde rotora
uygulanan ortalama moment sıfır olur. Bundan dolayı rotor ilk
yarı saykılda saat ibresi yönünde, ikici yarı saykılda ise saat
ibresinin tersi yönünde dönmeye çalışır. Rotor hareket
etmediğinden sadece titreşim yapar.
3

4
SENKRON MAKİNELER – Senkron Motor Çalışma Prensipleri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Senkron motoru çalıştırmak için rotorun devir sayısını senkron devre yada yakın bir değere
kadar yükselmek gerekir. Bu devir sayısı ile dönmekte olan senkron motorun sabit kutupları döner alan
kutupları ile kolayca kilitlenir. Kilitlenme sırasında zıt kutuplar birbirini çekerek rotor döner alan
yönünde ve döner alan hızı ile döner.
Senkron motor çalışmaya başladıktan sonra rotordan herhangi bir akım geçişi söz konusu
değildir. Çünkü rotor, senkron hızda döndüğünden döner alan tarafından kesilmemektedir ve
dolayısıyla da rotorda gerilim indüklenmemektedir.
Senkron motorlar senkron devir sayısında dönen motorlardır. Devir sayıları yüklü yada yüksüz
durumda değişmez hep aynı kalır. Devir sayıları, uygulanan üç fazlı şebeke geriliminin frekansı ile
doğru makinenin yapıldığı kutup sayısı ile ters orantılıdır. Buna göre senkron motorların devir sayılarını
şu şekilde ifade edebiliriz.
𝒏𝒎 =𝟏𝟐𝟎.𝒇𝒆
𝟐𝑷dir. Burada
ns; Senkron motorun devir sayısı (d/d)
fe; Şebeke frekansı (Hz)
2P; Senkron motorun kutup sayısı

5
Senkron motorları için gerekli olan DC enerji genellikle bilezik ve fırça tertibatı ile harici bir
kaynaktan sağlanır. Ancak bilezik ve fırça tertibatı hareketli kısımlar olduklarından enerji iletimi
sırasında bazı sorunlar ortaya çıkar. Bunlar; elektrik arkları, fırçalardaki güç kayıpları, sürtünmeden
dolayı oluşan mekanik problemler, yalıtım problemleri, fiziki alandaki büyüme gibi sıralamak
mümkündür. Fırça ve bilezik tertibatını kaldırarak yapılan düzenekler mevcuttur. Şekilde bu tür bir
sistem görülmektedir.
SENKRON MAKİNELER – Senkron Motor Çalışma Prensipleri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Şekilde Senkron motor miline ikinci bir küçük güçlü
senkron alternatör bağlanmıştır. Büyük güçlü senkron motor
için gerekli olan DC enerji, küçük güçlü senkron alternatörün
ürettiği AC gerilimin döner diyotlarla doğrultulmasından elde
edilmiştir. Küçük güçlü senkron alternatörün uyartımı için
gerekli DC enerji ise bir DC kaynaktan olabileceği gibi AC
kaynaktan alınan enerjinin doğrultulup kullanıldığı direkt
olarak bir DC kaynak kullanmak da mümkündür.

Senkron Motorların Kullanım Yerleri
• Sabit hızın gerekli olduğu bütün endüstriyel uygulamalarda kullanılır.
• Senkron kompansatör olarak güç katsayısının düzeltilmesi
• Yüksek kararlılık gerektiren konumlama makineleri bulunduran düşük güç uygulamaları ve
robot işleticiler
• Elektrik saatleri
• Kayıt cihazlarının döner tablaları
• Hava kompresörleri
• Santrifüj pompalar
• Kırma makineleri
• Değirmenler
6
SENKRON MAKİNELER – Senkron Motorların Kullanım Yerleri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

Avantajları
Senkron motorlar senkron olmayan motorlara göre aşağıdaki avantajlara sahiptir.
• Motor hızı yeterli uyartım akımının uygulanması şartıyla yükten bağımsızdır.
• Açık döngü kontrolleri kullanarak hız ve konumda kesin kontrol; örneğin step motorlar.
• Hem stator hem de rotor sargılarına DA uygulandığında konumları sabit tutarlar.
• Güç katsayıları yük için görece uygun bir alan akımı kullanarak omik olarak ayarlanabilir. Aynı
zamanda kapasitif bir güç katsayısı (mevcut fazın gerilimden ileri fazlı olması), bu akımı ağır
ağır arttırarak bütün kuruluşlar için daha iyi bir güç katsayısını düzeltmeye yardımcı olabilir.
• Yapıları düşük bir hız gerektiğinde elektriksel verimin artmasını sağlar.
• Ya senkron hızda çalışırlar yada hiç çalışmazlar.
7
SENKRON MAKİNELER – Senkron Motorların Kullanım Yerleri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

8
SENKRON MAKİNELER – Senkron Motorlara Yol Verme
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Senkron Motorlara Yol Verme
Senkron motorlar kendi kendilerine yol alamadıklarından, değişik yöntemler kullanılır. Bu
yöntemlerden bazıları şunlardır;
• Değişken frekanslı invertör kullanarak yol vermek,
• Amortisör sargıları kullanarak yol vermek,
• İkinci bir tahrik makinesi kullanarak yol vermek,
• Senkron generatör olarak çalıştırıp yol vermek
Değişken Frekanslı İnvertör Kullanarak Yol Vermek
Senkron motor kalkınırken, stator döner alan hızı senkron hızda döner. Kutuplara uygulanan
uyartım akımından dolayı rotor mıknatıslanır ve rotora stator döner alan yönünde bir dönme momenti
uygulanır. Ancak rotorun ataletinden dolayı senkron motorda kalkınma momenti üretilemez. Rotora
uygulanan bu momentin yönü stator döner alanının her yarı saykılında zıt yönde değiştiğinden, rotor
hareket edip stator döner alan yönünde dönemez. Yani, rotora uygulanan ortalama moment sıfır
olduğundan, rotor sadece titreşim yapar.
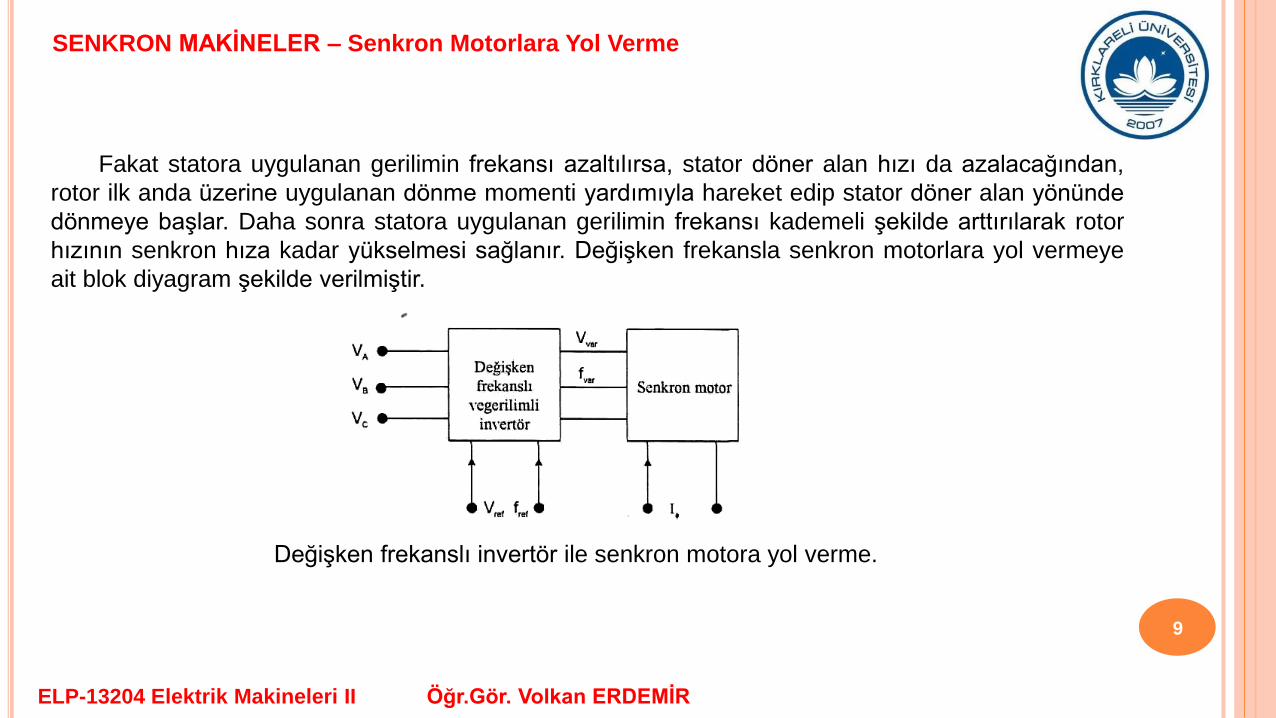
Değişken frekanslı invertör ile senkron motora yol verme.
9
Fakat statora uygulanan gerilimin frekansı azaltılırsa, stator döner alan hızı da azalacağından,
rotor ilk anda üzerine uygulanan dönme momenti yardımıyla hareket edip stator döner alan yönünde
dönmeye başlar. Daha sonra statora uygulanan gerilimin frekansı kademeli şekilde arttırılarak rotor
hızının senkron hıza kadar yükselmesi sağlanır. Değişken frekansla senkron motorlara yol vermeye
ait blok diyagram şekilde verilmiştir.
SENKRON MAKİNELER – Senkron Motorlara Yol Verme
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

10
SENKRON MAKİNELER – Senkron Motorlara Yol Verme
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Amortisör Sargıları Kullanarak Yol Vermek
Senkron motor kendi kendine kalkınamadığından, senkron motorun rotor yüzeyine kısa
devre çubukları veya amortisör sargıları yerleştirilir. Bu sargılar kısa devre edilerek, senkron motorun
ilk kalkınma durumunda aynen bir asenkron motor olarak çalışması sağlanır. Bu anda, kutup
sargılarına DC gerilim uygulanmaz ve uyartım sargıları büyük değerli bir direnç üzerinden kısa devre
edilirler. Çünkü senkron motoru kısa devre çubuklu asenkron motor olarak çalıştırıp kalkındırırken,
uyartım sargılarında da bir gerilim indüklenmektedir. Bu gerilimin değeri, uyartım sargısının sipir
sayısına da bağlı olduğundan, çok yüksek olup tehlike arz edebilir. Uyartım sargılarından çok büyük
değerli kısa devre akımlarının geçmemesi için devreye büyük değerli bir seri direnç bağlanır.
Kısa devre çubukları veya amortisman sargıları bulunan bir senkron motorun stator (endüvi)
sargılarına üç fazlı bir kaynaktan gerilim uygulanırsa, senkron motor aynen bir asenkron motor gibi
kalkınmaya başlar ve rotor hızı senkron değerlere yaklaşır. Bu anda uyartım devresi DC kaynaktan
beslenerek senkron motorun rotoru ile stator döner alanı kilitlenerek motorun senkron hızda
çalışması sağlanır. Amortisman sargılarının dirençleri küçük olduğundan, kalkınma anında senkron
motorun ürettiği kalkınma momenti sadece mekanik kayıpları karşılayacak değerdedir. Bundan
dolayı amortisman sargıları ile kalkındırılan bir senkron motor boşta kalkındırılmalıdır.

Senkron motor senkron hızda dönerken amortisman sargılarında herhangi bir gerilim
indüklenmez. Çünkü rotor üzerindeki amortisman sargıları da stator döner alan hızında dönmekte ve
amortisman sargıları herhangi bir şekilde stator manyetik akısı tarafından kesilmemektedir. Senkron
motorun hızında yükten dolayı herhangi bir değişme olursa; yani rotor hızı senkron hızın üzerine
çıkarsa veya senkron hızın altına düşerse amortisman sargılarında bir gerilim indüklenir ve
sargılardan akım dolaşır. Senkron motorun rotor hızı senkron hızın altına düşmüş ise, senkron motor
tekrar asenkron motor olarak çalışır ve bir döndürme momenti üretilir. Bu moment rotorun azalan
hızını tekrar senkron hıza yaklaştırır. Senkron motorun rotor hızı senkron hızın üzerine çıkmış ise
senkron motorun sargılarında indüklenen moment rotor hızının tekrar senkron değerlere inmesini
sağlar. Yani rotor hızının artması veya azalması durumunda da amortisman sargıları devreye girerek,
rotor hızının senkron hız değerlerine yaklaşmasını sağlar.
11
SENKRON MAKİNELER – Senkron Motorlara Yol Verme
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

Eğer senkron motor yük altında kalkındırılacak ise amortisman sargı dirençleri artırılarak
kalkınma momenti da artırılır. Ancak bu durumda kayma çok büyük olacağından, senkron hıza yakın
hız değerleri elde etmek mümkün olamayacağından, kutup alanı ile stator döner alanı arasında
kilitleme sağlanamayabilir. Bundan dolayı amortisman sargı dirençlerinin uygun miktarda artırılması
gerekir.
ÖZETLENECEK OLURSA AMORTİSMAN SARGILARI ARTAN ROTOR HIZINI
AZALTARAK SENKRON HIZA İNDİRİR, AZALAN ROTOR HIZINI ARTTIRARAK SENKRON HIZA
YAKLAŞTIRIR.
Amortisman sargıları senkron generatörün kalkınması için veya paralel bağlanması için
gerekli değildir. Ancak alternatör hızındaki değişmelerin de giderilmesi için yine amortisman
sargılarına ihtiyaç vardır.
12
SENKRON MAKİNELER – Senkron Motorlara Yol Verme
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

İkinci Bir Tahrik Makinesi Kullanarak Yol Vermek
İkinci bir tahrik makinesi kullanmaktaki amaç senkron motorun rotor hızını senkron hız
değerlerine yaklaştırmaktır. Senkron motor, miline bağlı olan herhangi bir tahrik makinesi tarafından
döndürülerek, rotor hızı senkron hız değerlerine yaklaştırılır veya tam senkron hıza çıkartılır. Bu anda
senkron motorun statoru üç fazlı alternatif kaynaktan, kutupları da DC kaynaktan beslenerek stator ve
kutup alanlarının birbiri ile kilitlenmesi sağlanır. Böylece senkron motor senkron hızda çalışmaya
başlar ve senkron motorun miline bağlı olan tahrik makinesi devre dışı bırakılır. Burada dikkat
edilmesi gereken husus, stator döner alan yönü ile tahrik makinesinin dönüş yönünün aynı olmasıdır.
Tahrik makinesi bir DC motor, bir asenkron motor veya bir dizel motor olabilir. Tahrik
makineleri sadece motorun kalkınmasında kullanıldıklarından ve kalkınma anında senkron motorda
da sadece mekanik kayıplar olduğundan, tahrik makinelerinin gücü küçüktür. Çoğu senkron
motorların tahrik makineleri senkron motorun miline sabit olarak bağlanmış olup, iki makineli komple
bir sistem halinde bulunmaktadır.
13
SENKRON MAKİNELER – Senkron Motorlara Yol Verme
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

14
Senkron Generatör Olarak Çalıştırarak Yol Vermek
Senkron makine önce senkron generatör olarak çalıştırılır ve daha sonra uyartım akımı
azaltılarak alternatör üzerindeki yük azaltılır ve sıfır yapılır. Uyartım akımı azaltılmaya devam edilir
ise, senkron makine alternatör çalışma durumundan senkron motor çalışma durumuna geçer. Bu
anda senkron makineyi döndüren tahrik makinesi de devre dışı bırakılır. Bu yöntem nadir de olsa
kullanılmaktadır. Özellikle laboratuvarlarda deney maksadıyla bu tür uygulamaları yapmak
mümkündür.
SENKRON MAKİNELER – Senkron Motorlara Yol Verme
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

Senkron Makinelerin V-Eğrileri
Senkron makinenin sabit kaynak gerilimi ve
frekansında, değişken uyartımdaki karakteristiği şekildeki V-
eğrileri ile açıklanır. Eğriler senkron makinenin fazör
diyagramından elde edilir. Yüksüz durumda uyartım akımı Ifayarlanarak makine birim güç faktöründe (cosφ=1.0)
çalıştırılabilir. Bu durumda stator akımı Is minimumdur.
Senkron makinenin giriş güç katsayısı, uyartım akımının
azaltılıp artırılmasıyla, geri veya ileri yapılabilmektedir.
Uyartım akımına karşılık gelen Is akımının değişimi V-eğrisi
şeklinde olur. Tam ve yarım yüklerde senkron makinenin
motor ve generatör çalışma durumuna göre V-eğrileri şekilde
verilmiştir.
15
SENKRON MAKİNELER – Senkron Makinelerin V-Eğrileri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Senkron makinenin motor ve generatöre
durumları için V eğrileri

Motor durumu için, uyartım akımı azaltıldıkça motor endüktif özellik gösterir. Yani motor
akımı Is, uygulanan gerilimden geridedir. Uyartım akımı sıfıra doğru yaklaştıkça motorun endüktifliği
ve endüvi akımı artar, endüvi akımı ile gerilimi arasındaki açı 90°'ye yaklaşırken güç katsayısı
cosφ=0.0'a doğru yaklaşır. Motor endüktif çalışırken yük sıfır ise, motorun çektiği akım da az olup
sadece mekanik kayıpları karşılayacak kadardır. Yük arttıkça eğride omik çalışma noktasına doğru
kayar. Uyartım akımı artırılırsa, motorun çektiği Is akımı azalarak endüktiflik azalır, omik çalışmaya
doğru yaklaşılır. Uyartım akımının değişmesine karşılık, endüvi akımında (Is) herhangi bir değişme
yoksa bu noktada endüvi akımı minimumdur ve motor omik çalışmaya geçmiştir. Yani motorun çektiği
endüvi akımı ile motora uygulanan gerilim aynı fazda olup açı sıfırdır ve cosφ=1.0 dir.
Uyartım akımındaki artışa devam edilirse, endüvi akımı tekrar artmaya başlar ve bu noktadan
sonra motor kapasitif çalışmaya başlar. Kapasitif çalışma durumu uyartım akımına bağlı olarak artış
gösterir. Dolayısıyla endüvi akımı endüvi gerilimine göre önde olmak üzere, akım ve gerilim
arasındaki açıda -90o 'ye doğru çıkarken cosφ=0.0'a yaklaşır.
Senkron makinenin motor çalışması durumunda elde edilen V-eğrisi çeşitli yük durumlarına
göre farklılık göstermektedir. Motor boşta çalışırken elde edilen V-eğrileri en dışta olup, motor
yüklendikçe V-eğrisi omik çalışma eğrisine doğru yaklaşmaktadır. Omik çalışma durumunda, boşta
gerekli olan uyartım akım değeri yük miktarı arttıkça artmaktadır. Bunun nedeni endüvi
reaksiyonunun çeşitli yükler için farklı olması ve doymanın artmasıdır.16
SENKRON MAKİNELER – Senkron Makinelerin V-Eğrileri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

Senkron motorun veya alternatörün
uyartım akımına karşılık güç katsayısının
değişimi.
17
SENKRON MAKİNELER – Senkron Makinelerin V-Eğrileri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Boştaki endüvi reaksiyonu ile yüklü durumdaki endüvi.
reaksiyonu farklı olduğundan, uç geriliminin sabit kalabilmesi
için omik yüklü durumda daha fazla uyartım akımına ihtiyaç
vardır. Yük altında çalışan bir senkron motorun uyartım akımı
anma değerinden fazla ise motor kapasitif, anma değerinden
az ise motor endüktif çalışmaktadır. Uyartım akımının çok
küçük ve çok büyük olduğu noktalarda senkron motor
kararsız çalışma durumuna geçer. Dolayısıyla senkron
motorların uyartım akımları çok geniş sınırlar içerisinde
değiştirilemezler. Şekilde kararlı çalışma sınırlan belirtilmiştir.
Senkron makinenin alternatör olarak çalışması
durumunda ise, motor olarak çalışması durumundaki
söylenenlerin tam tersini söylemek yeterli olacaktır. Yani
fazla uyartım akımı alternatörün endüktif, az uyartım akımı
da alternatörün kapasitif çalışmasına neden olur.
Senkron makinenin motor veya alternatör çalışma
durumuna göre güç katsayısı ve uyartım akımı arasındaki
bağıntı şekilde verilmiştir.

Şekil de 0°- 90° arasındaki açılar ister negatit, ister
pozitif olsun, kosinüslerı birbirlerine eşit ve pozitif değerlidir.
Senkron makine yüklendikçe eğri soldan sağa doğru
kaymaktadır. Güç katsayısının 1 olduğu noktalar makinenin
omik çalışma noktalarıdır. Motor çalışma durumu için omik
çalışma noktasının sol tarafı endüktif çalışmayı, sağ tarafı
kapasitif çalışmayı verir. Alternatör çalışma durumu için ise,
sol taraf kapasitif, sağ taraf endüktif çalışmayı verir.
Güç katsayısının (cosφ) sıfıra yaklaştığı noktalarda
endüvi akımı ile gerilimi arasındaki açı 90°'ye yaklaşmıştır.
Açının -90° veya +90°'ye yaklaşması ise yükün endüktif veya
kapasitif olma durumuna bağlıdır.
18
SENKRON MAKİNELER – Senkron Makinelerin V-Eğrileri
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Senkron motorun veya alternatörün
uyartım akımına karşılık güç katsayısının
değişimi.

Senkron Motorun Reaktif Güç Kompanzasyonu Olarak Kullanılması
Endüstride kullanılan endüktif yüklerin çekmiş oldukları reaktif enerjiler enerji nakil hattını
fazladan yüklediklerinden, hattan çekilen aktif enerji miktarını artırmak için enerji nakil hattındaki
iletkenin kesitini artırmak gerekir. Yüklerin ihtiyacı olan reaktif enerjiler, ya statik olarak
kondansatörlerle, ya da dinamik olarak senkron motorlarla kompanze edilirler.
Senkron motorların uyartım akımlarının değiştirilmesi ile motorun kapasitif veya endüktif
olarak çalıştırılması sağlanabilmektedir. Ayrıca senkron motorun şebekeden çektiği reaktif gücün
miktarı da uyartım akımı ile ayarlanabilmektedir. Bundan dolayı, senkron motorlar dinamik güç
kompanzasyonu olark kullanılmaktadırlar. Senkron motor güç kompanzasyonu olarak kullanılırken
üzerinde herhangi bir yük yok ise, kaynaktan çekeceği aktif güç sadece mekanik kayıpları karşılamak
içindir.
19
SENKRON MAKİNELER – Senkron Motorun Reaktif Güç Kompanzasyonu
Olarak Kullanılması
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR

Enerji nakil hattına bağlı
senkron motor ve yük. 20
SENKRON MAKİNELER – Senkron Motorun Reaktif Güç Kompanzasyonu
Olarak Kullanılması
ELP-13204 Elektrik Makineleri II Öğr.Gör. Volkan ERDEMİR
Dinamik güç kompanzasyonu olarak kullanılan bir
senkron motorun sisteme bağlantısı şekilde verilmiştir.
Burada sistemde yük olarak bir asenkron motor
bulunmaktadır. Senkron motor ve asenkron motor sisteme
birer şalterle bağlanmışlardır. Sisteme bağlı olan asenkron
motorun şebekeden çekeceği geri reaktif güç, senkron
motorun şebekeden çekeceği ileri reaktif güç ile
dengelenerek, sistemin güç katsayısı istenilen değere
getirilmektedir.

21
KAYNAKLAR
• SAÇKAN, A. Hamdi; Elektrik Makineleri III
• ALTUNSAÇLI, Adem; ALACALI, Mahmut; Elektrik Makineleri II
• ÇOLAK, İlhami; Asenkron Motorlar
• BAL, Güngör; Özel Elektrik Motorları
• ÇOLAK, İlhami; Senkron Motorlar
• CHAPMAN, Stephen J.; Electrıc Machinery Fundamentaly 4.Edition
• FITZGERALD, A. E.; KINGSLEY, Charles Jr.; UMANS, Stephen D.; Electric Machinery
Sixth Edition
• PAREKH, Rakesh; AC Induction Motor Fundamentals; Microchip Technology Inc.,
Microchip AN887
• Three-phase Asynchronous Motors, Generalities and ABB proposals for the
coordination of protective devices
• www.wikipedia.org


















