1 Filtrage des mesures gradiométriques Gilles Métris CERGA Observatoire de la Côte dAzur.
55
1 Filtrage des mesures Filtrage des mesures gradiométriques gradiométriques Gilles Métris Gilles Métris CERGA CERGA Observatoire de la Côte d’Azur Observatoire de la Côte d’Azur
-
Upload
edmond-senechal -
Category
Documents
-
view
104 -
download
0
Transcript of 1 Filtrage des mesures gradiométriques Gilles Métris CERGA Observatoire de la Côte dAzur.

1
Filtrage des mesures Filtrage des mesures gradiométriquesgradiométriques
Gilles MétrisGilles Métris
CERGACERGA
Observatoire de la Côte d’AzurObservatoire de la Côte d’Azur

2-6 septembre 2002 Ecole d ’été GRGS 2
FiltrageFiltrage
Opération consistant à extraire d ’un signal observé, le Opération consistant à extraire d ’un signal observé, le signal utile pour l ’observateur.signal utile pour l ’observateur.

2-6 septembre 2002 Ecole d ’été GRGS 3
Généralité sur les variables Généralité sur les variables aléatoiresaléatoires
Espérance d ’une Espérance d ’une variable aléatoire:variable aléatoire:
Moments :Moments :
Covariance de deux VA :Covariance de deux VA :Coefficient de corrélation :Coefficient de corrélation :
En dimension En dimension nn : :Matrice de covarianceMatrice de covariance
aléatoire)(non certain évennementun pour
é)probabilit de densité (continu en xT
discreten )]([
xXE
xTdxxf
xfpXfEi
ii
dispersionou type-écart
variance 2 ordred' centrémoment ][
equadratiqu moyenne ][
moyenne ][
2
212
212
222
1
mmmXE
xpXEm
xpXEm
XEm
iii
iii
nn
][ 221112 mXmXEC
1021
12
C
221
22
221
1122
1
][
nnn
n
n
TccX
CC
CC
CC
XXEC

2-6 septembre 2002 Ecole d ’été GRGS 4
Processus aléatoiresProcessus aléatoires
Processus aléatoire (ou stochastique) : génération d’une VA au Processus aléatoire (ou stochastique) : génération d’une VA au cours du temps (au sens large) = fonction aléatoire.cours du temps (au sens large) = fonction aléatoire.En discret : séquence de VA En discret : séquence de VA
Exemple : Exemple : – Résultat d’un lancé de dès = variable aléatoireRésultat d’un lancé de dès = variable aléatoire– Succession de lancés de dès = processus stochastiqueSuccession de lancés de dès = processus stochastique
Les moments sont maintenant une fonction du temps :Les moments sont maintenant une fonction du temps :
Covariance mutuelle : Covariance mutuelle :
][iX
discret en temps ]][[][
continu en temps ][
kXEkm
tXEtm
n
n
corrélée.non est aléatoirefonction la , Si
signal)du (puissance Variance ,
e translatécopie sa avec signal""du ceressemblan la mesure : Covariance ,,
mutuelle Covariance ,,
212
X21
2X
2121
21221121
ttttC
ttCt
ttCttC
ttCtmtYtmtXEttC
X
X
XXX
YXYXXY

2-6 septembre 2002 Ecole d ’été GRGS 5
Stationnarité : Stationnarité : – Un processus aléatoire est stationnaire si tous ses moments Un processus aléatoire est stationnaire si tous ses moments
sont indépendants de l’origine du temps.sont indépendants de l’origine du temps.– Stationnarité d’ordre 2 (ou faible) : la moyenne ne dépend pas Stationnarité d’ordre 2 (ou faible) : la moyenne ne dépend pas
du temps et la covariance ne dépend que de la différence entre du temps et la covariance ne dépend que de la différence entre les deux arguments les deux arguments fonction d ’autocorrélationfonction d ’autocorrélation ::
Ergodisme : un processus est ergodique si on peut remplacer les Ergodisme : un processus est ergodique si on peut remplacer les sommes sur des ensembles par des sommes temporelles.sommes sur des ensembles par des sommes temporelles.Ex : au lieu de lancer Ex : au lieu de lancer NN dés, on lance dés, on lance NN fois successivement le fois successivement le même dés.même dés.Ergodisme en moyenne :Ergodisme en moyenne :
Stationnarité - ErgodicitéStationnarité - Ergodicité
22
2121
0,
,
XXXX
XX
XX
CttCt
ttCttC
mtm
discreten 1
continuen 1
0
0
0
0
0
0
lim
lim
nmnXN
tmdttXT
X
Nn
nnN
X
Tt
tT

2-6 septembre 2002 Ecole d ’été GRGS 6
Densité spectrale de puissanceDensité spectrale de puissanceBruit blanc - bruit coloréBruit blanc - bruit coloré
Densité spectrale de puissanceDensité spectrale de puissance (DSP) : c’est la transformée (DSP) : c’est la transformée de Fourier de la fonction d’autocorrélation :de Fourier de la fonction d’autocorrélation :
La DSP décrit la répartition de la puissance La DSP décrit la répartition de la puissance 22 suivant les suivant les fréquences. fréquences.
Cas d’un processus non corrélé :Cas d’un processus non corrélé :
La DSP est la même à toutes les fréquences : on a un bruit blanc.La DSP est la même à toutes les fréquences : on a un bruit blanc.Inversement, si la DSP varie avec la fréquence (bruit coloré), le Inversement, si la DSP varie avec la fréquence (bruit coloré), le processus est corrélé.processus est corrélé.
dffC
dffeCdCef
XX
Xfj
XXfj
X
0
2X
22
2X
2X fC XX

7 Ecole d ’été GRGS 2-6 septembre 2002
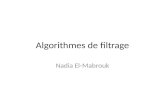
Spécificationinitiale :
3 mE/Hz entre0.005 et 0.1 Hz
Performancesprédites (à partird ’analyses et de tests)
(200 s) (10 s)
GOCE : densité spectrale de bruit du gradiomètre

2-6 septembre 2002 Ecole d ’été GRGS 8
Exemple d’un gradiomètreExemple d’un gradiomètre
La structure de l’équation d’observation est :La structure de l’équation d’observation est :
)(Δ)]([)]([][)( 0 kkkk tbtItTAKtM
Biais
Matrice instrumentale
Tenseur gradient de gravité
Tenseur d’inertie
Bras dugradiomètre
Bruit
= combinaison linéaire des coefficients du champ de gravité que l’on veut déterminer.

2-6 septembre 2002 Ecole d ’été GRGS 9
Gradiomètre (suite)Gradiomètre (suite)
Equations d’observations linéaires classiques
Vecteur des observations
[X] = Vecteur des paramètres à déterminer (gravité…)
[h] = Matrice de configuration
[B] = Bruit (supposé centré et stationnaire d’ordre 2)
[P]T[P] = Matrice de pondération
Solution classique (MC)minimise erreur sur les observation
][][][][11
BXhMppnn
]][[][][]][[][][]ˆ[ mini])ˆ[]ˆ([1
MPPhhPPhXMMMME TTTTT
]][[][]][[]][[11
BPXhPMPnnppnnnn
Pondération

2-6 septembre 2002 Ecole d ’été GRGS 10
Choix de la pondérationChoix de la pondération
Matrice [P] qui minimise la variance sur l’estimation de Matrice [P] qui minimise la variance sur l’estimation de [X] :[X] :
[R[Rbb] = Matrice de covariance] = Matrice de covariance
Il faut donc :Il faut donc :– Evaluer la fonction d’autocorrélation,Evaluer la fonction d’autocorrélation,– En déduire la matrice de covariance et l’inverser.En déduire la matrice de covariance et l’inverser.
11 ][)]][([][][ mini])ˆ[]ˆ([ bTTT RBBEPPXXXXE
! colorébruit un pour pas mais blanc,bruit un pour ][
ation)autocorréld'(fonction ][)(
ij
jib
ji
jibbERij

2-6 septembre 2002 Ecole d ’été GRGS 11
Fonction d’autocorrélationFonction d’autocorrélation
Par définition, la densité spectrale de puissance (DSP) Par définition, la densité spectrale de puissance (DSP) est la TF de la fonction d’autocorrélation.est la TF de la fonction d’autocorrélation.
Inversement, connaissant la DSP (PSD en anglais), on Inversement, connaissant la DSP (PSD en anglais), on peut en principe calculer la la fonction d’autocorrélation peut en principe calculer la la fonction d’autocorrélation par TF inverse…par TF inverse…
… … mais : mais : – la DSP à priori reste un modèle et est difficile à la DSP à priori reste un modèle et est difficile à
quantifier avec grande précision (les instruments ne quantifier avec grande précision (les instruments ne peuvent être testés complètement au sol)peuvent être testés complètement au sol)
– si la dynamique de bruit est très grande, une petite si la dynamique de bruit est très grande, une petite erreur relative de modèle dans une zone de bruit erreur relative de modèle dans une zone de bruit important peut dégrader nettement la restitution.important peut dégrader nettement la restitution.

2-6 septembre 2002 Ecole d ’été GRGS 12
Inversion de la matrice de Inversion de la matrice de covariancecovariance
En l’absence d’hypothèses (trop) restrictives, c’est une En l’absence d’hypothèses (trop) restrictives, c’est une matrice carrée, pleine, de grande taille (autant que le matrice carrée, pleine, de grande taille (autant que le nombre d’observations)nombre d’observations)
CC’’est une matrice de Toeplitz symétrique (Rest une matrice de Toeplitz symétrique (Rij ij == RRji ji =R=Ri-ji-j) ) qui offre des algorithmes particuliers d’inversion (ou de qui offre des algorithmes particuliers d’inversion (ou de décomposition).décomposition).
Le calcul est toujours lourd (si pas impraticable) dans le Le calcul est toujours lourd (si pas impraticable) dans le cas de plusieurs centaines de milliers d’observations. cas de plusieurs centaines de milliers d’observations.

2-6 septembre 2002 Ecole d ’été GRGS 13
Bilan :Bilan :
L’utilisation d’une matrice de pondération non diagonale L’utilisation d’une matrice de pondération non diagonale dans l’espoir d’obtenir un estimateur à variance dans l’espoir d’obtenir un estimateur à variance minimale en présence de bruit coloré représente un minimale en présence de bruit coloré représente un gros effort calculatoire pour une optimisation incertaine.gros effort calculatoire pour une optimisation incertaine.
Il est plus efficace d’effectuer un prétraitement sur le Il est plus efficace d’effectuer un prétraitement sur le signal pour pouvoir ensuite appliquer une inversion par signal pour pouvoir ensuite appliquer une inversion par MC non pondérés (ou avec une pondération diagonale).MC non pondérés (ou avec une pondération diagonale).

2-6 septembre 2002 Ecole d ’été GRGS 14
PrincipePrincipe
Au lieu de considérer les équations d’observations pour Au lieu de considérer les équations d’observations pour différentes dates :différentes dates :
On peut travailler en fréquentiel et considérer les On peut travailler en fréquentiel et considérer les équations d’observation pour différentes équations d’observation pour différentes fréquences :fréquences :
ikik XthtM
ikik XfHfM

2-6 septembre 2002 Ecole d ’été GRGS 15
Avantages :Avantages :– On obtient un bruit non corrélé (propriété de la TF)On obtient un bruit non corrélé (propriété de la TF)– Connaissant la DSP, la pondération (diagonale) est directe.Connaissant la DSP, la pondération (diagonale) est directe.
Inconvénient : la projection en fréquentiel est toujours délicate.Inconvénient : la projection en fréquentiel est toujours délicate.– Quelles raies de projection choisir ? Quelles raies de projection choisir ? – Celles prévues par une théorie linéaire du satellite ?Celles prévues par une théorie linéaire du satellite ?– Gros risque de perdre de l’information.Gros risque de perdre de l’information.– Appliquer la FFT en utilisant toutes les raies (pas de perte Appliquer la FFT en utilisant toutes les raies (pas de perte
d’information) ?d’information) ?
DSP) (12
kk
k
ikikkk
ff
fW
XfHfWfMfW

2-6 septembre 2002 Ecole d ’été GRGS 16
Simplification supplémentaireSimplification supplémentaire
Utiliser seulement le domaine fréquentiel sur lequel la Utiliser seulement le domaine fréquentiel sur lequel la DSP peut être considérée comme uniforme DSP peut être considérée comme uniforme
Cela revient à appliquer un filtre passe bande :Cela revient à appliquer un filtre passe bande :
Avantage : ce filtre (classique) peut-être appliqué Avantage : ce filtre (classique) peut-être appliqué directement en temporeldirectement en temporel
21 , si fffXfHfM kikik
sinon 0
],[ si 1 21 ffffW
XfHfWfMfW
kk
ikikkk
ikikkk XthtwtMtw

17 Ecole d ’été GRGS 2-6 septembre 2002
Spécificationinitiale :
3 mE/Hz entre0.005 et 0.1 Hz
Performancesprédites (à partird ’analyses et de tests)
(200 s) (10 s)
GOCE : densité spectrale de bruit du gradiomètre

2-6 septembre 2002 Ecole d ’été GRGS 18
StratégieStratégie
Choisir un filtre passe-bande,Choisir un filtre passe-bande,
Appliquer ce filtre (en temporel)Appliquer ce filtre (en temporel)– Aux observations,Aux observations,– Aux dérivées partielles (matrice de configuration)Aux dérivées partielles (matrice de configuration)Signaux ne comprenant que les fréquences « utilisables »
Il est indispensable d ’appliquer le même filtre aux observations et aux dérivées partielles pour obtenir les mêmes « distorsions »
Appliquer les MC aux signaux filtrés.Appliquer les MC aux signaux filtrés.

2-6 septembre 2002 Ecole d ’été GRGS 19
Caractéristiques du filtreCaractéristiques du filtre
Contraintes fortes :Contraintes fortes :– Passe bande,Passe bande,– Très forte atténuation loin de la bande passante (Très forte atténuation loin de la bande passante (
le bruit devient très fortle bruit devient très fort).). Contraintes faibles :Contraintes faibles :
Grâce au fait que l’on applique le même filtre aux Grâce au fait que l’on applique le même filtre aux observations et aux dérivées partielles, on peu observations et aux dérivées partielles, on peu admettreadmettre– Un gain un peu différent de 1 dans la bande Un gain un peu différent de 1 dans la bande
passante,passante,– Une transition pas spécialement raide,Une transition pas spécialement raide,– Un déphasage à peu près quelconque.Un déphasage à peu près quelconque.

2-6 septembre 2002 Ecole d ’été GRGS 20

2-6 septembre 2002 Ecole d ’été GRGS 21
Filtres numériquesFiltres numériques
Filtre = Système Linéaire Invariant (SLI)Filtre = Système Linéaire Invariant (SLI) Système linéaire : Système linéaire :
Le signal en sortie du système est obtenu à partir du Le signal en sortie du système est obtenu à partir du signal d entrée par un opérateur linéaire.signal d entrée par un opérateur linéaire.
Exemple : La transformée de fourier est un SL
Système invariant :Système invariant :
La transformation effectuée par le système est La transformation effectuée par le système est indépendante de l’origine temporelle (sauf phase indépendante de l’origine temporelle (sauf phase transitoire)transitoire)
NiklN
k
ekxly /21
0
][][][][ nkxGnlykxGly

2-6 septembre 2002 Ecole d ’été GRGS 22
Représentation des filtres Représentation des filtres numériquesnumériques
Filtre numérique = discret Filtre numérique = discret (par opposition à filtre analogique = continu)(par opposition à filtre analogique = continu)
Discrétisation = Discrétisation = échantillonnage à pas fixe échantillonnage à pas fixe TTee
Fréquence d ’échantillonnage Fréquence d ’échantillonnage ffee
Notation :Notation :
Filtrage linéaire :
Le système est en général dynamique : Le système est en général dynamique : yy[[kk00] est fonction de ] est fonction de xx à la date à la date kk00 mais aussi à d’autres dates mais aussi à d’autres dates kk
][][ kxkTtx e
causalest filtre le 00 si
][][1
na
nkxaky
n
nn

2-6 septembre 2002 Ecole d ’été GRGS 23
Réponse impulsionnelleRéponse impulsionnelle
C’est la réponse du filtre à une impulsion :C’est la réponse du filtre à une impulsion :
hh = réponse impulsionnelle ou séquence de pondération. = réponse impulsionnelle ou séquence de pondération.
x[k] = impulsion
-1
0
1
-4 -3 -2 -1 0 1 2 3 4
y[k] = h[k] réponse impulsionnelle
-1
0
1
-4 -3 -2 -1 0 1 2 3 4
][][][][ khkykkx

2-6 septembre 2002 Ecole d ’été GRGS 24
Relation de convolutionRelation de convolution
Problème : Problème : – entrée x[k] (k = variable et non pas une date fixée)entrée x[k] (k = variable et non pas une date fixée)
– sortie y[ksortie y[k00] (k] (k0 0 = date fixée) ?= date fixée) ?
][
]x[k][ ]y[k
: indiced' changement
date la à ]h[k][ ]y[k réponse dates les toutesà Entrées
date la à ]h[k][ ]y[k réponse date la à ][ Entrée
e)(invarianc date la à ]h[k ]y[k réponse date la àImpulsion
date la à ]h[k ]y[k réponse 0 date la àImpulsion
0
00
0
000
000
000
000
2
1
kxh
nnh
kkn
kkkxk
kkkxkkx
kkk
k
n
k

2-6 septembre 2002 Ecole d ’été GRGS 25
Systèmes IIR et FIRSystèmes IIR et FIR
(IIR) Infinie elleImpulsionn Réponse Sinon
2
1
N
N21 n]-h[n]x[ky[k] : (FIR) Finie elleImpulsionn Réponse ],[0][ Si NNnnh
0
n]-h[n]x[ky[k] : causal Filtre 00][ Si nnh
causalnon sinon 0
12
1][
][12
1][
KnKKnh
nkxK
kyK
Kn
Exemple :Exemple :
Réalisation ? Stabilité ?Réalisation ? Stabilité ?

2-6 septembre 2002 Ecole d ’été GRGS 26
Filtres réalisablesFiltres réalisables
Un filtre FIR est toujours réalisable car il demande un Un filtre FIR est toujours réalisable car il demande un nombre fini d’opérations.nombre fini d’opérations.
Un filtre IIR numérique n’est pas pas réalisable en Un filtre IIR numérique n’est pas pas réalisable en appliquant directement la relation de convolution qui appliquant directement la relation de convolution qui demande un nombre infini d’opérations.demande un nombre infini d’opérations.
A une date A une date kk, on peut utiliser :, on peut utiliser :– un nombre fini d’entrées antérieures (système un nombre fini d’entrées antérieures (système
causal),causal),– un nombre fini de sorties strictement antérieuresun nombre fini de sorties strictement antérieuresfiltre causalle plus général réalisable :
J
jj
I
ii jkxikyky
01
][][][ Equation aux différences d’ordre Equation aux différences d’ordre II

2-6 septembre 2002 Ecole d ’été GRGS 27
Relation entre RI et équation aux Relation entre RI et équation aux différencesdifférences
Ainsi l’ensemble des filtres réalisables est restreint par Ainsi l’ensemble des filtres réalisables est restreint par cette récurrence sur la RI.cette récurrence sur la RI.
Jkikh
jkikhkhkkx
jkxikyky
I
ii
J
jj
I
ii
J
jj
I
ii
pour ][
][][][][][
][][][
1
01
01

2-6 septembre 2002 Ecole d ’été GRGS 28
ExempleExemple
0]0[ si ]0[]0[ exemplePar
? initialeCondition
][]1[][ sdifférenceaux Equation
]1[][ : Mais
réalisablenon ][][ :n convolutio deEquation
00
10][
0
kxxy
kxkyky
khkh
nkxky
k
kkh
n
n
k

2-6 septembre 2002 Ecole d ’été GRGS 29
Fonctions propres d’un filtreFonctions propres d’un filtre
– La réponse est proportionnelle à l’entréeLa réponse est proportionnelle à l’entrée– zzkk est une fonction propre du filtre est une fonction propre du filtre– H(z) est la transmittance (ou fonction de transfert) H(z) est la transmittance (ou fonction de transfert)
du filtredu filtre
)(][
h[n]z
h[n]zy[k]
complexe zSoit x[k]
n-
n-k
k
zHkx
z
z
n
k
n

2-6 septembre 2002 Ecole d ’été GRGS 30
Réponse en fréquenceRéponse en fréquence
Des fonctions propres particulières sont les fonctions Des fonctions propres particulières sont les fonctions harmoniques harmoniques
fréquence la à filtredu Déphasage )(Arg
fréquence la à filtredu Gain )(
fréquenceen réponse h de TF : ][)(
)(][][
réel ][
2
2
H
H
enhH
Hkxky
ekx
nj
n
kj

2-6 septembre 2002 Ecole d ’été GRGS 31
Transformée en ZTransformée en Z
Par analogie avec la TF discrète Par analogie avec la TF discrète la fonction est appelée la fonction est appelée Transformée en z Transformée en z dede x. x.
C ’est une série de Laurent, convergente sur une C ’est une série de Laurent, convergente sur une couronnecouronne
centrée sur O : centrée sur O :
Ainsi la fonction de transfert Ainsi la fonction de transfert
est la Transformée en z de la RI.est la Transformée en z de la RI.
n
X n-i2x[n]e)(
n
zX -nx[n]z)(
n
zH -nh[n]z)(
Rzr0

2-6 septembre 2002 Ecole d ’été GRGS 32
Propriétés de la TZPropriétés de la TZ
Retard :Retard :
Transformation du produit de convolution en produit Transformation du produit de convolution en produit simple : simple :
LinéaritéLinéarité
)(][][ 00 zXzzUkkxku k
zX
zYzH
zXzHzYkxhky
][][

2-6 septembre 2002 Ecole d ’été GRGS 33
Transmittance d’un filtre réalisableTransmittance d’un filtre réalisable
Equation aux différences :Equation aux différences :
Transformée en Z :Transformée en Z :
La transmittance est une fraction rationnelle de deux polynômes La transmittance est une fraction rationnelle de deux polynômes en en zz-1-1 (ou en (ou en zz))– n = ordre du filtren = ordre du filtre– les racines de les racines de N(z) N(z) sont les zéros de la transmittancesont les zéros de la transmittance– les racines de les racines de D(z)D(z) sont les pôles de la transmittance. sont les pôles de la transmittance.
n
jj
m
ii jkxikyky
01
][][][
1
1
11
110
1
01
1
][][car 1
zD
zN
zz
zz
zX
zYzH
kyTZzikyTZzXzzYz
mmn
nn
n
j
jj
m
i
ii

2-6 septembre 2002 Ecole d ’été GRGS 34
StabilitéStabilité
Stabilité EBSBStabilité EBSB : : un filtre est stable EBSB si à toute un filtre est stable EBSB si à toute Entrée Bornée correspond une Sortie Bornée.Entrée Bornée correspond une Sortie Bornée.
Equation de convolution :Equation de convolution :– Un FIR est toujours stable (suite finie)Un FIR est toujours stable (suite finie)– Un IIR peut être instable (suite infinie)Un IIR peut être instable (suite infinie)
Confirmé par l’étude de la transmittance :Confirmé par l’étude de la transmittance :Rôle fondamental des 0 et des pôlesRôle fondamental des 0 et des pôles– m = 0 : non récursif m = 0 : non récursif FIR FIR tous zéros tous zéros MAMA– n=0 : récursif n=0 : récursif IIR IIR tous pôles tous pôles ARAR– m m et n et n : récursif ; IIR ; pôle-zéros ; ARMA: récursif ; IIR ; pôle-zéros ; ARMA
m
m
nn
zz
zzzH
11
110
1

2-6 septembre 2002 Ecole d ’été GRGS 35
Stabilité d’un filtre causalStabilité d’un filtre causal
Stabilité EBSB :Stabilité EBSB :
Filtre causal : Filtre causal :
R1r0
unité cercle lecontient )( de econvergenc de couronne La
1pour econvergent absolumentest )(
bornée sortie bornée Entrée
zH
zznhzH
nhn
R
z
nh
znhzH
nnh
n
n
0
0
)(
00

2-6 septembre 2002 Ecole d ’été GRGS 36
Stabilité d’un filtre causalStabilité d’un filtre causal
Filtre causal stable :Filtre causal stable :
Un filtre causal est stable EBSB si et seulement si tous Un filtre causal est stable EBSB si et seulement si tous les pôles de sa transmittance sont strictement à les pôles de sa transmittance sont strictement à l’intérieur du cercle unité du plan complexe.l’intérieur du cercle unité du plan complexe.
1p vérifient pôles les Tous
10
rp
R
r
InstabilitéInstabilité StabilitéStabilité
CercleCercle
unitéunité

2-6 septembre 2002 Ecole d ’été GRGS 37
e
m
X p1
X p2*
X p1*
X p2
Filtre instable
O z1*
O z111
e
m
X p1
X p2*
X p1*
X p2
Filtre stable
O z1*
O z111
*
22*
11
*11
2
1*2
12
1*1
11
1*1
11
1111
1)1(
pzpzpzpz
zzzzz
zpzpzpzp
zzzzzH

2-6 septembre 2002 Ecole d ’été GRGS 38
Caractéristiques généralesCaractéristiques générales
Les filtres FIR sont les seuls à permettre un déphasage Les filtres FIR sont les seuls à permettre un déphasage linéaire (par rapport à la fréquence)linéaire (par rapport à la fréquence)
Les filtres IIR sont en général plus économiques mais Les filtres IIR sont en général plus économiques mais plus sujets à des erreurs numériques, même quand ils plus sujets à des erreurs numériques, même quand ils sont stables (récursivité)sont stables (récursivité)
Un zéro Un zéro zzii de de HH placé sur le cercle unité correspond à un placé sur le cercle unité correspond à un zéro de transmission de la fréquence zéro de transmission de la fréquence ii=Arg(=Arg(zzii).).
Un pôle Un pôle ppii de de HH placé sur le cercle unité correspond à placé sur le cercle unité correspond à une résonance de transmission de la fréquence une résonance de transmission de la fréquence ii=Arg(=Arg(ppii).).

2-6 septembre 2002 Ecole d ’été GRGS 39
Exemple : filtre de Butterworth Exemple : filtre de Butterworth
n
c
nF2
2
1
1
impair ,1exp
pair ,2
121exp
)(stabilité négative réelle partie à pôles :,)(
1)(
)1(1
1)(
1
1
11
2
2
2
22
nn
ij
nn
ij
ns
sH
s
psH
i
ppHpHipHF
i
in
i
n
nnc
n
n
c
Fonctions de Butterworth :
Filtre analogiqueFiltre analogique :

2-6 septembre 2002 Ecole d ’été GRGS 40
Fonctions de Butterworth Fonctions de Butterworth

2-6 septembre 2002 Ecole d ’été GRGS 41
Passage au discretPassage au discret
La transformation bilinéaire est la méthode la plus courante pourLa transformation bilinéaire est la méthode la plus courante pour
synthétiser un filtre numérique à partir d’un filtre analogiquesynthétiser un filtre numérique à partir d’un filtre analogique
Fonction de transfert en p Fonction de transfert en p Fonction de transfert en zFonction de transfert en z
nageéchatillond' pas
1
121
1
e
e
T
z
z
Tp
zHpH
Correspondance entre fréquence numérique et fréquence analogique :Correspondance entre fréquence numérique et fréquence analogique :
en
e
a TfT
f
tan1
1
1
)/tan(
1
z
z
ffs
ecSubstitution : Substitution :

2-6 septembre 2002 Ecole d ’été GRGS 42
Filtre passe bas Filtre passe bas filtre passe bande
2tan
2cot
2cos
2cos
11
2
1
11
1
1
2
12
12
1
pbh
bh
bh
k
Zk
kZ
k
kk
kZ
k
kZ
z
p p bbhh

2-6 septembre 2002 Ecole d ’été GRGS 43
Aspects pratiquesAspects pratiques
Choix du filtre :Choix du filtre :
- - fonctions de basefonctions de base : Butterworth, Tchebytcheff, elliptique...: Butterworth, Tchebytcheff, elliptique...
- ou filtre spécial - ou filtre spécial (équations de Yule-Walker...)équations de Yule-Walker...)
- - ordre : ordre augmente ordre : ordre augmente @@ amélioration desamélioration des performances en amplitude,performances en amplitude,
@ augmentation du déphasage (en général),@ augmentation du déphasage (en général),
@ perte de données au début (phase d’initialisation)@ perte de données au début (phase d’initialisation)
@ augmentation du coût en temps de calcul.@ augmentation du coût en temps de calcul.
- - ou ou gabarit..
- fréquences de transition : - fréquences de transition :
@ le filtre utilise des numéros d'événement, pas le temps@ le filtre utilise des numéros d'événement, pas le temps
utilisation de fréquences normalisées :utilisation de fréquences normalisées :
2
10
20
ff : lfréquentieEn
: lEn tempore
e
e
e
ek
ff
f
f
kTt

2-6 septembre 2002 Ecole d ’été GRGS 44
Gabarit d’un filtreGabarit d’un filtre

2-6 septembre 2002 Ecole d ’été GRGS 45
Aspects pratiques (suite)Aspects pratiques (suite)
Utilisation du filtre :Utilisation du filtre :
- - fonction de transfert
- - programmation en cellule
Elaboration du filtre :Elaboration du filtre : logiciels existants

2-6 septembre 2002 Ecole d ’été GRGS 46
Utilisation de la fonction de transfertUtilisation de la fonction de transfert
1imposer d'permet qui ce parfois
1
01
1
1
1
11
110
zD
zNGzH
zD
zN
zz
zz
zX
zYzH
nn
mm
m
jj
n
ii jkxGikyky
01
][][][
m
jj
n
ii jkxGikyky
01
][][][
Fonction de transfert :Fonction de transfert :
Equation aux différences :Equation aux différences :
Programmation récursive Programmation récursive
(boucle sur k)(boucle sur k)
]1[]2[]1[]2[
]1[]1[
101
0
xxGyy
xGy
j
Initialisation :Initialisation :

2-6 septembre 2002 Ecole d ’été GRGS 47
Représentation en cellulesReprésentation en cellules
12
12
11
zD
zNzHzH
q
iq
q
i
Il est pratique d’utiliser une factorisation de la fonction de transfertIl est pratique d’utiliser une factorisation de la fonction de transfert
en cellules du second ordre (fournie par les logiciels en général) :en cellules du second ordre (fournie par les logiciels en général) :
][][ 21 khhhkh q
yxxx qhhh 12121
Fonction de transfert :Fonction de transfert :
Programmation séquentielleProgrammation séquentielle
des cellules :des cellules :
Réponse impulsionnelle :Réponse impulsionnelle :

2-6 septembre 2002 Ecole d ’été GRGS 48
Traitement du signal interactifTraitement du signal interactif
Directement sur le WEBDirectement sur le WEB : :– Liste de sites montrants des démos :Liste de sites montrants des démos :
http://www.ensicaen.ismra.fr/~furon/Liens_Java/_appletsJava.htmlhttp://www.ensicaen.ismra.fr/~furon/Liens_Java/_appletsJava.html– Un tableau de bord permettant de visulaiser à la fois les zéros et les pôles, la RI, Un tableau de bord permettant de visulaiser à la fois les zéros et les pôles, la RI,
la réponse en fréquence pour les fitres les plus courants :la réponse en fréquence pour les fitres les plus courants :
http://wwwext.enssat.fr:8080/RECHERCHE/ARCHI/Enseignement/Signal/V2/http://wwwext.enssat.fr:8080/RECHERCHE/ARCHI/Enseignement/Signal/V2/Java_Filtre.htmlJava_Filtre.html– Conception automatique de filtres, visualisation de leur réponse en fréquence et Conception automatique de filtres, visualisation de leur réponse en fréquence et
affichage de la fonction de transfert :affichage de la fonction de transfert :
http://www.nauticom.net/www/jdtaft/http://www.nauticom.net/www/jdtaft/
http://dolphin.wmin.ac.uk/filter_design.htmlhttp://dolphin.wmin.ac.uk/filter_design.html Logiciels :Logiciels :
– MATLAB : logiciel universellement utilsé dans le monde du traitement du signal ; MATLAB : logiciel universellement utilsé dans le monde du traitement du signal ; puissant mais onéreux.puissant mais onéreux.
– SCILAB : logiciel gratuit développé par l’INRIA (http://www-rocq.inria.fr/scilab/)SCILAB : logiciel gratuit développé par l’INRIA (http://www-rocq.inria.fr/scilab/) offrant des fonctions intéressantes mais peu convivial.offrant des fonctions intéressantes mais peu convivial.
– OCTAVE : une autre alternative gratuite à MATLAB(plus répandue apparemment) : OCTAVE : une autre alternative gratuite à MATLAB(plus répandue apparemment) : http://www.octave.org/http://www.octave.org/

2-6 septembre 2002 Ecole d ’été GRGS 49
ExemplesExemples
Construction interactive de filtre surConstruction interactive de filtre sur http http://://wwwwww..nauticomnauticom.net/.net/wwwwww//jdtaftjdtaft//iiriir..htmhtm
Mise en évidence du déphasageMise en évidence du déphasage
GOCE :GOCE :
00995.0,00525.0Hz 10f
Hz 0.0995 , Hz 0.0525 f
Hz 0.1f , Hz 0.005 f
e
c
hb
c

- Le filtre d ’ordre 2 a un gain plus proche de 1...- Le filtre d ’ordre 2 a un gain plus proche de 1...
- … mais il déphase plus.- … mais il déphase plus.
- Noter les effets de l’initialisation- Noter les effets de l’initialisation

2-6 septembre 2002 Ecole d ’été GRGS 51
Processus MA, AR, ARMAProcessus MA, AR, ARMA
Ce sont des modèles de processus stochastiques qui Ce sont des modèles de processus stochastiques qui reposent sur la transformation d’un bruit blanc par un reposent sur la transformation d’un bruit blanc par un filtre linéaire.filtre linéaire.
Filtre FIR Filtre FIR Modèle à moyenne mobile (MA)Modèle à moyenne mobile (MA)
Filtre IIR tous pôles Filtre IIR tous pôles Modèle autorégressif (AR)Modèle autorégressif (AR)
Filtre IIR Filtre IIR Modèle autorégressif à moyenne mobile Modèle autorégressif à moyenne mobile (ARMA)(ARMA)
n
jj jkbky
0
][][
n
jj
m
ii jkbikyky
00
][][][
][][][0
kbikykym
ii

2-6 septembre 2002 Ecole d ’été GRGS 52
Filtrage optimal de WienerFiltrage optimal de Wiener
Position du problème :Position du problème :
On cherche un filtre linéaire On cherche un filtre linéaire w(t)w(t) tel que : tel que :
Filtre optimal Filtre optimal minimisationde l’erreur d’estimation principe d’orthogonalité
tbtxty
Signal observéSignal observé Signal cherchéSignal cherché bruitbruit
dtyw
tytwtx̂

2-6 septembre 2002 Ecole d ’été GRGS 53
f
ffW
ffWf
TF
CwdCwC
dtytyEwtytxE
tytywtxE
tytxtxE
yy
xy
yyxy
yyyyxy
0
0ˆ
La DSP de y peut-être calculée à partir des observationsLa DSP de y peut-être calculée à partir des observations
mais on n’a en général pas accès à la DSP mutuelle de x et y….mais on n’a en général pas accès à la DSP mutuelle de x et y….

2-6 septembre 2002 Ecole d ’été GRGS 54
… … un truc à essayerun truc à essayer
fff
tCtC
tCtCtCtCtbtxty
bbxx
bbxx
xbbbxxyy
yy
corrélés.non sont signal leet bruit le si
f
fffW
yy
bbyy
Calculable si on une idée à priori de la DSP du bruit.

2-6 septembre 2002 Ecole d ’été GRGS 55
BibliographieBibliographie
– « Processus stochastiques, estimation et prédiction »,« Processus stochastiques, estimation et prédiction »,cours de M. Gevers et L. Vandendorpe, Université cours de M. Gevers et L. Vandendorpe, Université catholique de Louvain.catholique de Louvain.
– Représentation des signaux certains et des systèmes »,Représentation des signaux certains et des systèmes »,Dominique Beauvois et Yves Tanguy, Supélec, 01139.Dominique Beauvois et Yves Tanguy, Supélec, 01139.
– « Traitement numérique des signaux certains »,« Traitement numérique des signaux certains »,Yves Tanguy, Supélec, 01140.Yves Tanguy, Supélec, 01140.
– « Filtrage analogique et numérique », cours Dept GEII IUT « Filtrage analogique et numérique », cours Dept GEII IUT Bordeaux I, G. Couturier.Bordeaux I, G. Couturier.