1- EA Circuitos Equivalentes Cap. 1 2011
33
1 Ing. Francisco Ruffa 1 Electroacústica I Circuitos Equivalentes Capítulo 1 Ing. Francisco Ruffa 2 Circuitos equivalentes En electricidad y electrónica, disponemos de diferentes elementos que permiten representar un circuito y analizar su comportamiento. En electroacústica, el análisis del comportamiento de un resonador de Helmholtz, el cono de un altoparlante o la cuerda de un violín, debe ser modelizado, llevándolos a un circuito equivalente que interprete el funcionamiento de cada una de sus partes. La forma más sencilla, será asimilándolo a un circuito eléctrico, muy fácil de estudiar. Estos modelos se denominan circuitos análogos electro – mecano - acústicos. Para ello, se elige un universo de símbolos cuyas características representan las propiedades físicas de los componentes verdaderos, relacionados entre sí matemáticamente y con una equivalencia entre sus magnitudes y unidades.
-
Upload
david-benavides -
Category
Documents
-
view
107 -
download
4
Transcript of 1- EA Circuitos Equivalentes Cap. 1 2011

1
Ing. Francisco Ruffa 1
Electroacústica ICircuitos
Equivalentes Capítulo 1
Ing. Francisco Ruffa 2
Circuitos equivalentes
En electricidad y electrónica, disponemos de diferentes elementos que permiten representar un circuito y analizar su comportamiento.
En electroacústica, el análisis del comportamiento de un resonador de Helmholtz, el cono de un altoparlante o la cuerda de un violín, debe ser modelizado, llevándolos a un circuito equivalente que interprete el funcionamiento de cada una de sus partes.
La forma más sencilla, será asimilándolo a un circuito eléctrico, muy fácil de estudiar.
Estos modelos se denominan circuitos análogos electro – mecano -acústicos.
Para ello, se elige un universo de símbolos cuyas características representan las propiedades físicas de los componentes verdaderos, relacionados entre sí matemáticamente y con una equivalencia entre sus magnitudes y unidades.

2
Ing. Francisco Ruffa 3
Para poder emplear representaciones esquemáticas en el estudio de los dispositivos acústicos y mecánicos, el método debe permitir:
Formar un diagrama por inspección.
Manipularlos para combinar elementos eléctricos, mecánicos y acústicosen un diagrama único.
Preservar la identidad de cada elemento.
Utilizar símbolos y reglas familiares a los circuitos eléctricos.
Ing. Francisco Ruffa 4
Cantidades genéricas:
a: Caída a través de un elemento de circuito.
b: Flujo a través de él.
c: Magnitud del elemento.
Ref: “Acústica” - Leo L. Beranek

3
Ing. Francisco Ruffa 5
El significado físico de los elementos de circuito c, depende de la maneracomo se eligen las cantidades a y b.
La restricción consiste en que el producto a x b tiene, en todos los casos, la dimensión de una potencia.
La cantidad a no está limitada a una tensión eléctrica, por lo que podrá ser una fuerza (f), una velocidad (u), una presión (p) o una velocidad de volumen(U).
Igualmente, b representará, en el mismo órden, una velocidad u, unafuerza f, una velocidad de volumen U o una presión p.
La cantidad c podrá ser cualquiera, tal como una resistencia, unainductancia, una masa, etc, y su significado físico dependerá de la maneracomo se elijan las cantidades a y b.
Las operaciones matemáticas asociadas con un símbolo dado son invariantes, tal como se observa en la tabla anterior.
Ing. Francisco Ruffa 6
Analogías mecánicas
Los elementos de los circuitos mecánico no necesitan ser expresadossiempre por símbolos eléctricos.
Los diagramas de estos circuitos suelen dibujarse por inspección.
Oportunamente, estableceremos un conjunto de elementos “mecánicos”para su uso en este tipo de analogía.

4
Ing. Francisco Ruffa 7
Circuito eléctrico Dispositivo mecánico
Tensión eléctricaPuede medirse sin
abrir el circuito.
Corriente eléctricaDebe medirse abriéndolo, dado que esta fluye a travésde el.
Velocidad o desplazamiento
Puede ser medida sin perturbar la máquina.
FuerzaDebe medirse interviniendo el
dispositivo.
Ing. Francisco Ruffa 8
Si el circuito eléctrico es estrictamente análogo al mecánico, este estarácaracterizado por una diferencia de velocidad entre sus dos terminales y unafuerza actuante.
A esta analogía se la denomina de “movilidad” o inversa.
Resultará entonces que:
Potencia [Watt] = f (fuerza eficaz) [Newton] x u (velocidad eficaz ) [m/s]
Es comun, además, encontrar una analogía directa o de “impedancia”,opuesta a la de movilidad, donde lo que fluye es la velocidad y lo que se encuentra aplicada es la fuerza.

5
Ing. Francisco Ruffa 9
Impedancia mecánica ZM y movilidad mecánica zM
La Impedancia mecánica es la relación compleja entre la fuerza y la velocidad, en un punto dado de un dispositivo mecánico.
Se expresa como:
ZM [Newton- segundo / m] u [ohm mecánico MKS]
La movilidad mecánica es la inversa y se expresa como:
zM [m / Newton – segundo] o [mohm mecánico MKS]
Ing. Francisco Ruffa 10
Un movimiento armónico simple esta caracterizado por el desplazamiento de una masa sujeta a una fuerza de reconstitución elástica lineal dada por la ley de Hooke.
El movimiento es sinusoidal en tiempo y da una solafrecuencia de resonancia.
La ecuación de un movimiento armónico simple contiene una descripción completa del movimiento, además de otros parámetros que pueden sercalculados a partir de este.
El desplazamiento, la velocidad y la aceleración vienen dados por:
Movimiento armónico simple
tmKsenoXtωsenoXX ==
tωcosoXωv =
X2ωtωsenoX2ωa −=−=

6
Ing. Francisco Ruffa 11
Vibraciones Un sistema mecánico podrá oscilar en dos direcciones si lo movemos en una
de ellas y luego lo liberamos.
El tiempo en segundos que el sistema tarda en cumplir un oscilación completa se llama período.
Al número de veces que el sistema complete una oscilación en un segundo se lo denomina frecuencia de la vibración, la que expresamos en Hz o ciclos por segundo.
La frecuencia es la recíproca del período.
El movimiento en función del tiempo de cualquier punto de un sistema lineal que vibre, se expresa por:
tmKsenoXtωsenoXX ==
Donde: xo = amplitud del movimiento ω = 2πft f = frecuencia de vibración (Hz) t = tiempo (seg)
Ing. Francisco Ruffa 12
La velocidad y la aceleración se obtienen por:
El desplazamiento x se expresa en m , mm, ó μm; la velocidad v en m/s ómm/s y la aceleración a en m/s2
En realidad, estas cantidades son tan pequeñas, que se expresan en mm o en μm.
txv∂∂
=tva∂∂
=

7
Ing. Francisco Ruffa 13
Masa MM
La masa [Kg] es la cantidad física que accionada por una fuerza, resultaacelerada en proporción directa con la fuerza.
Parecería que requiere un solo terminal, pero la fuerza que actua sobre ellase refiere a la tierra (sistema inercial), por lo que esta será su segundoterminal.
La figura muestra su símbolo mecánico.
Según el segundo principio de Newton:
En estado estacionario:
uMωjf M ×××=
( ) ( ) aMttuMtf MM ×=⎥⎦⎤
⎢⎣⎡∂
∂×=
Ing. Francisco Ruffa 14
Siendo el símbolo que utilizaremos, según la analogía tipomovilidad, será un capacitor.
En estado estacionario: o bien
En un circuito eléctrico la integral respecto al tiempo de la corriente quefluye por un capacitor es la carga.
En un circuito mecánico, la integral respecto del tiempo de la fuerza es la cantidad de movimiento.
En la analogía tipo impedancia, el símbolo será una inductancia.
En estado estacionario:
o bien
uMωjf M×××=
Cωjba××
=MMωj
fu××
=
uMωjf M ×××=bLωja ×××= uMωjf M ×××=

8
Ing. Francisco Ruffa 15
Compliancia mecánica CM
Una estructura física es una compliancia mecánica [m / Newton], cuandoaccionada por una fuerza, sufre un desplazamiento proporcional a la misma.
Estos elementos tienen, por lo general, dos terminales aparentes.
La figura muestra su símbolo mecánico, el cual posee forma de resorte.
El extremo superior se mueve con velocidad u1 y el inferior con velocidad u2.
La fuerza necesaria para determinar esa diferencia de velocidades la mediríamos interviniendo en la máquina.
La compliancia mecánica obedece a la ley física:
ó
• En estado estacionario:
∫ ∂×= tbC1a ( ) ( ) ( )tdtu
C1tf
M∫×=
MCωjuf××
=
Ing. Francisco Ruffa 16
El símbolo que utilizaremos según la analogía tipo movilidad, será unainductancia.
En estado estacionario: ó bien
En un circuito eléctrico, la integral respecto al tiempo de la tensión a través de una inductancia es el flujo concatenado.
La integral respecto al tiempo de la velocidad es el desplazamiento.
En la analogía tipo impedancia, el símbolo será un capacitor.
En estado estacionario:
ó
bLja ×××= ω bLja ×××= ω
bLωja ×××= fCωju M ×××=
Cωjba××
=MCωj
uf××
=

9
Ing. Francisco Ruffa 17
Rigidez o constante del resorte
• La rigidez es una característica específica de los resortes y representa la reacción del mismo frente al desplazamiento de su posición de equilibrio.
• También se la conoce como constante del resorte K.
• Se la define como la relación entre la fuerza ejercida por el resorte y el desplazamiento provocado.
• Unidades:
En un sistema mecánico, definimos a la compliancia como la inversa de la constante de resorte K.
⎥⎦⎤
⎢⎣⎡mmKg
⎥⎦⎤
⎢⎣⎡
mgramo
⎥⎦⎤
⎢⎣⎡
mmdina
⎥⎦⎤
⎢⎣⎡
mKg
Ing. Francisco Ruffa 18
Resistencia mecánica RM y responsibilidad mecánica rM
Una estructura mecánica es una resistencia mecánica RM [ohm mecánicoMKS] cuando, accionada por una fuerza, se mueve con una velocidaddirectamente proporcional a la fuerza. Definimos tambien una cantidad rM[mhoms mecánicos MKS], como su recíproca.
Estos elementos tienen, por lo general, dos terminales aparentes.
Está limitada a la resistencia viscosa, excluyendo la resistencia friccional,dado que en ésta, la relación de fuerza a velocidad no es constante.
Se entiende por amortiguamiento la pérdida de energía mecánica debida al rozamiento o fuerzas viscosas.
Es proporcional a la velocidad relativa entre dos cuerpos en movimiento.

10
Ing. Francisco Ruffa 19
La figura muestra su símbolo mecánico (un amortiguador hidráulico).
El extremo superior se mueve a u1 y el inferior a u2 y la fuerza necesaria para producir esa diferencia, puedemedirse interviniendo en la máquina.
Una resistencia mecánica obedece a la siguiente ley física:
Donde: RM = resistencia mecánica en ohm mecánicos [Newton/m/seg]rM = responsabilidad mecánica en mohm mecánico [m/seg/Newton]
El símbolo que utilizaremos según la analogía movilidad, será unaresistencia.
MM r
uuRf =×=
Ing. Francisco Ruffa 20
Tanto en el estado transitorio como en el estacionario, será:
Generadores mecánicos
Los generadores mecánicos que consideraremos son de dos tipos:
De velocidad constante.
De fuerza constante.
Estos elementos poseen dos terminales.
MM R
ffru =×=

11
Ing. Francisco Ruffa 21
Fuentes eléctricas
En electricidad se entiende por fuente al elemento activo que es capaz de generar una diferencia de potencial (d. d. p.) entre sus bornes o proporcionar unacorriente eléctrica.
Una clasificación posible de fuentes puede ser:
De tensión
De intensidad
Fuentes ideales
La figura muestra los símbolos de las fuentes idealesde tensión (a) e intensidad (b).
Las fuentes ideales son elementos utilizados en la teoría de circuitos para analizar y crear modelos quepermita el estudio de componentes electrónicos.
Ing. Francisco Ruffa 22
Pueden ser independientes, si sus magnitudes (tensión o corriente) son siempre constantes, o dependientes en el caso de que dependan de otra magnitud (tensión o corriente).
En este punto se tratarán solo las fuentes independientes cuyos símbolos se observan en la figura anterior.
El signo + en la fuente de tensión, indica el polo positivo o ánodo y E el valor de su fuerza electromotriz (fem).
En la fuente de intensidad, la flecha indica la dirección de la corriente eléctrica, e I su valor.
Definiciones
Fuente de tensión ideal: aquella que genera una d. d. p. entre sus terminales constante e independiente de la carga que alimente.
Si la resistencia de carga es infinita se dirá que la fuente está en circuito abierto y si fuese cero estaríamos en un caso absurdo, ya que según su definición una fuente de tensión ideal no puede estar en cortocircuito.

12
Ing. Francisco Ruffa 23
Fuente de intensidad ideal: aquella que proporciona una intensidad constante e independiente de la carga que alimente. Si la resistencia de carga es cero se dirá que la fuente está en cortocircuito, y
si fuese infinita estaríamos en un caso absurdo, ya que según su definición una fuente de intensidad ideal no puede estar en circuito abierto.
Fuentes reales
La figura muestra los símbolos de lasfuentes reales de tensión (a) e intensidad(b).
A diferencia de las fuentes ideales, la d.d.p. que producen o la corriente queproporcionan las fuentes reales, dependede la carga a la que estén conectadas.
Ing. Francisco Ruffa 24
Fuentes de tensión real: es aquella que se la puede considerar como una fuente de tensión ideal Eg, en serie con una resistencia Rg, a la que se denomina resistencia interna de la misma.
En circuito abierto, la tensión entre los bornes A y B (VAB) es igual a Eg (VAB = Eg).
Si entre los bornes se conecta una carga RL, la tensión pasa a ser:
Donde se observa que ahora depende de la carga conectada.
En la práctica las cargas deberán ser mucho mayores que la resistencia interna de la fuente (al menos diez veces) para conseguir que el valor en sus bornes no difiera mucho del valor a circuito abierto.
gL
LgAB RR
REV+
×=
13
Ing. Francisco Ruffa 25
La potencia se determina multiplicando su fem por la corriente que proporciona.
Se considera positiva si la corriente sale por el ánodo y negativa en caso contrario.
Como ejemplos de fuentes de tensión real podemos enumerar las baterias, las pilas y las fuentes de alimentación.
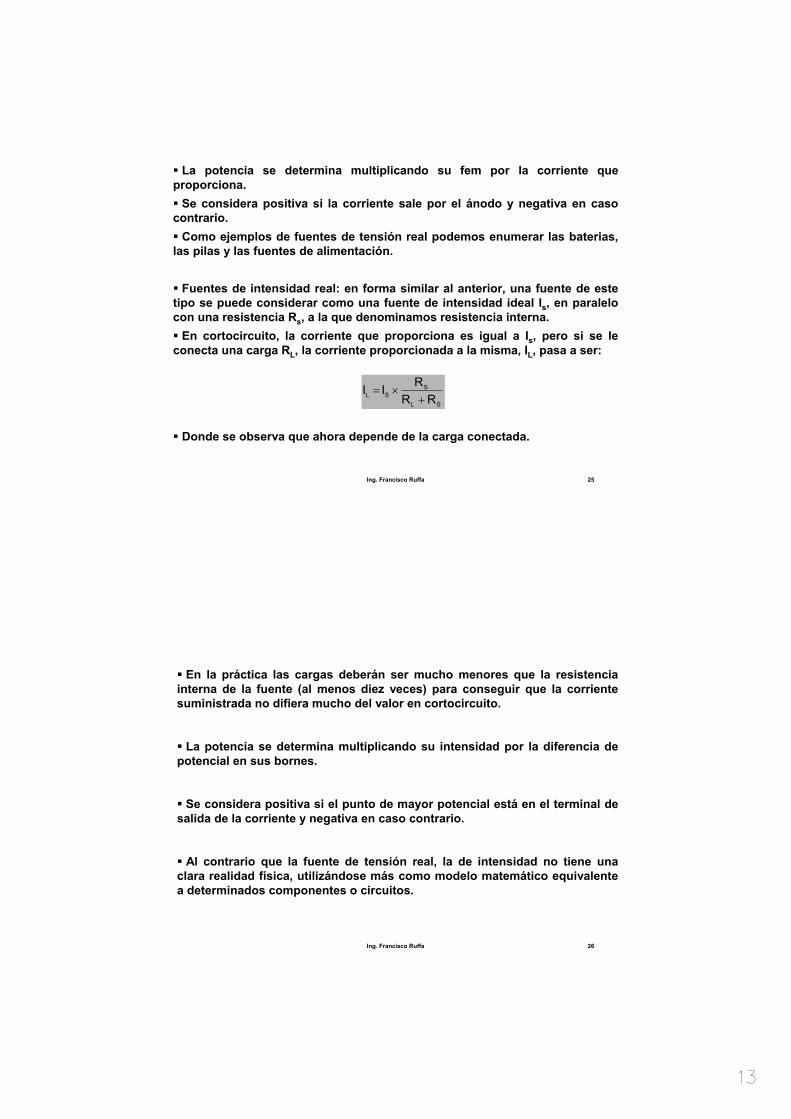
Fuentes de intensidad real: en forma similar al anterior, una fuente de este tipo se puede considerar como una fuente de intensidad ideal Is, en paralelo con una resistencia Rs, a la que denominamos resistencia interna.
En cortocircuito, la corriente que proporciona es igual a Is, pero si se le conecta una carga RL, la corriente proporcionada a la misma, IL, pasa a ser:
Donde se observa que ahora depende de la carga conectada.
SL
SSL RR
RII+
×=
Ing. Francisco Ruffa 26
En la práctica las cargas deberán ser mucho menores que la resistencia interna de la fuente (al menos diez veces) para conseguir que la corriente suministrada no difiera mucho del valor en cortocircuito.
La potencia se determina multiplicando su intensidad por la diferencia de potencial en sus bornes.
Se considera positiva si el punto de mayor potencial está en el terminal de salida de la corriente y negativa en caso contrario.
Al contrario que la fuente de tensión real, la de intensidad no tiene una clara realidad física, utilizándose más como modelo matemático equivalente a determinados componentes o circuitos.

14
Ing. Francisco Ruffa 27
La figura muestra el símbolo de un generador de este tipo, formado por un motor muy potente asociado con un mecanismo de manivela.
Los extremos opuestos del generador tienenvelocidades u1 y u2.
Una de estas velocidades está determinada porfactores externos al generador.
La diferencia u entre ambas es una velocidadindependiente de la carga conectada al generador.
Generador de velocidad constante
La figura muestra su símbolo en ambas analogías.
Ing. Francisco Ruffa 28
Podemos observar que:
Las puntas de flecha indican el terminal “positivo” del mismo.
El doble círculo indica que la movilidad interna es cero.
La linea punteada indica, en cambio, que la impedancia interna del generador es infinita.

15
Ing. Francisco Ruffa 29
La figura muestra el símbolo de un generador de este tipo, formado por un transductor mecánico(p. ej.: un altoparlante de bobina móvil), donde:
Los extremos opuestos del generador tienenvelocidades u1 y u2 , determinadas ambas porfactores externos al generador.
La fuerza que genera y que puede ser medidainterviniendo en el dispositivo, es constante, e independiente de la carga conectada al generador.
Generador de fuerza constante
ilBf ∧×=
Ing. Francisco Ruffa 30
Podemos observar que:
Las puntas de flecha indican el sentido del flujo positivo.
El doble círculo indica que la impedancia interna es cero.
La linea punteada indica, en cambio, que la movilidad interna del generador es infinita.
La figura muestra su símbolo en ambas analogías.
16
Ing. Francisco Ruffa 31
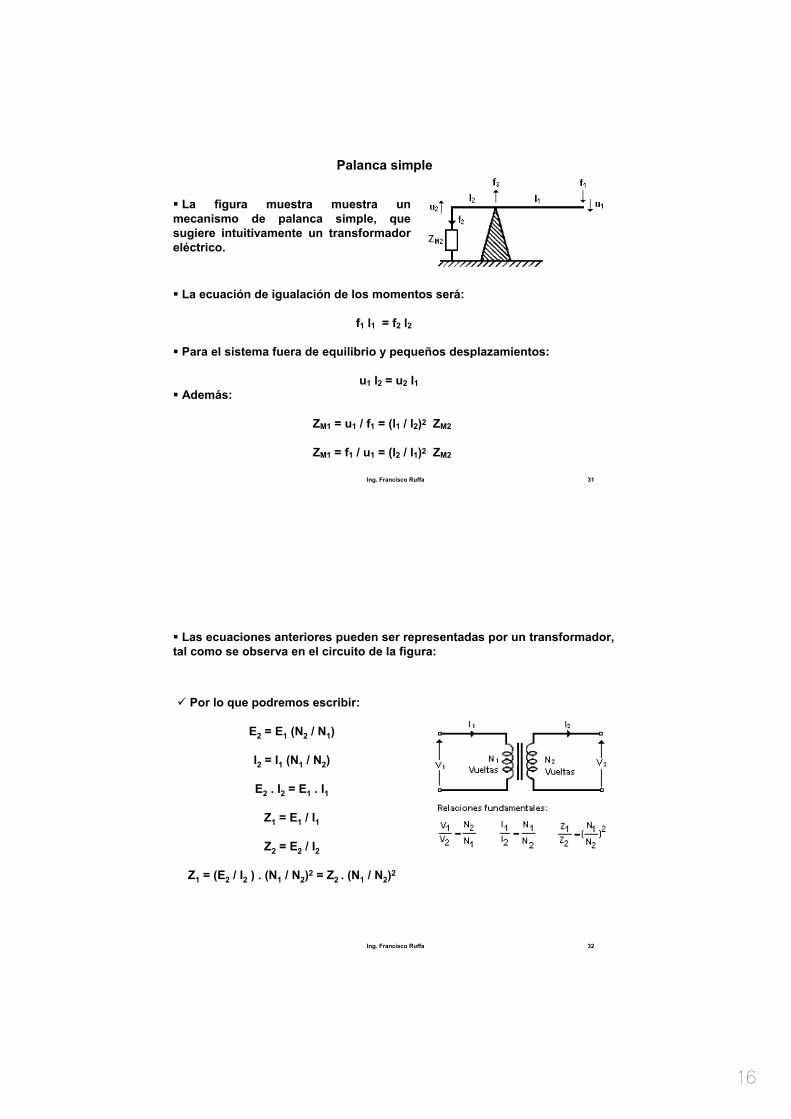
Palanca simple
La ecuación de igualación de los momentos será:
f1 l1 = f2 l2
Para el sistema fuera de equilibrio y pequeños desplazamientos:
u1 l2 = u2 l1Además:
ZM1 = u1 / f1 = (l1 / l2)2 ZM2
ZM1 = f1 / u1 = (l2 / l1)2 ZM2
La figura muestra muestra un mecanismo de palanca simple, quesugiere intuitivamente un transformadoreléctrico.
Ing. Francisco Ruffa 32
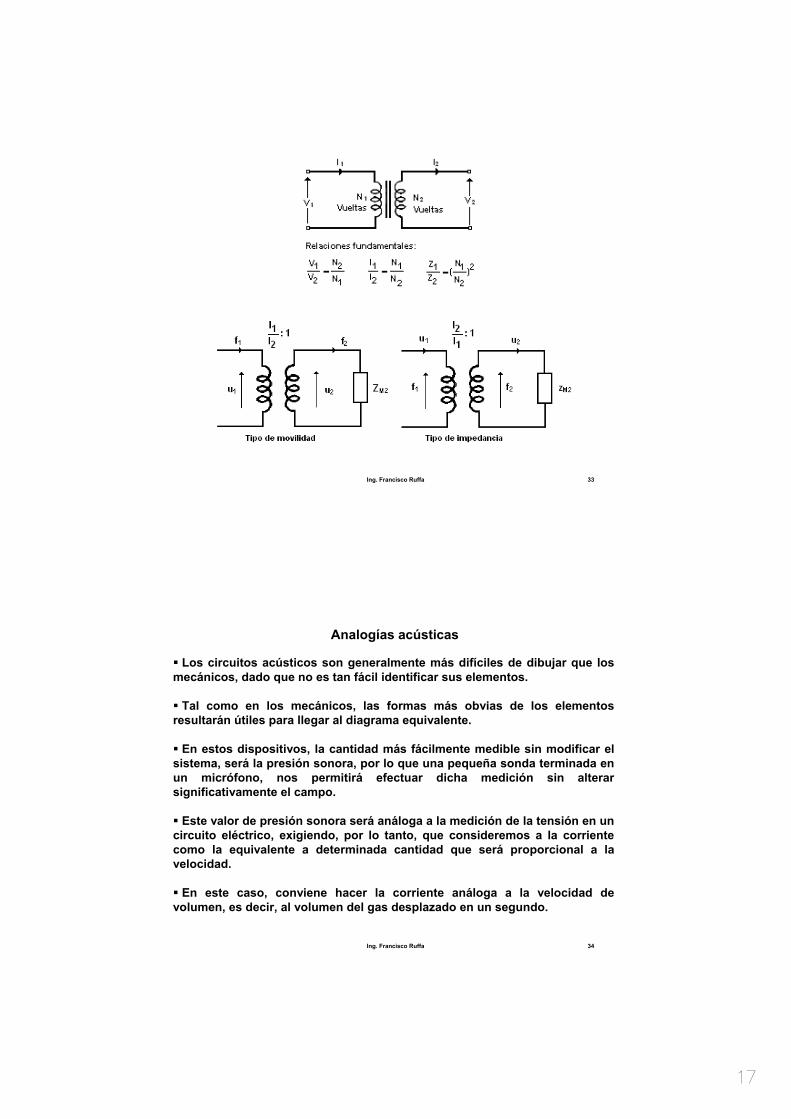
Por lo que podremos escribir:
E2 = E1 (N2 / N1)
I2 = I1 (N1 / N2)
E2 . I2 = E1 . I1
Z1 = E1 / I1
Z2 = E2 / I2
Z1 = (E2 / I2 ) . (N1 / N2)2 = Z2 . (N1 / N2)2
Las ecuaciones anteriores pueden ser representadas por un transformador, tal como se observa en el circuito de la figura:
17
Ing. Francisco Ruffa 33
Ing. Francisco Ruffa 34
Analogías acústicas
Los circuitos acústicos son generalmente más difíciles de dibujar que los mecánicos, dado que no es tan fácil identificar sus elementos.
Tal como en los mecánicos, las formas más obvias de los elementosresultarán útiles para llegar al diagrama equivalente.
En estos dispositivos, la cantidad más fácilmente medible sin modificar el sistema, será la presión sonora, por lo que una pequeña sonda terminada en un micrófono, nos permitirá efectuar dicha medición sin alterarsignificativamente el campo.
Este valor de presión sonora será análoga a la medición de la tensión en un circuito eléctrico, exigiendo, por lo tanto, que consideremos a la corrientecomo la equivalente a determinada cantidad que será proporcional a la velocidad.
En este caso, conviene hacer la corriente análoga a la velocidad de volumen, es decir, al volumen del gas desplazado en un segundo.

18
Ing. Francisco Ruffa 35
Supongamos una cavidad como la de la figura, conectada al exterior mediante un tubo.
Si exponemos el extremo del tubo a un campo sonoro, éste provocará el movimiento de laspartículas de aire dentro del tubo, pudiéndoseobservar que:
1. Inmediatamente antes y despues del punto A, empalme del tubo con la cavidad, la presión sonora será la misma.
2. La cantidad de aire que sale por ese extremo del tubo en un determinadointervalo de tiempo, será igual a la que entra en la cavidad en el mismotiempo, es decir, las masas de aire en movimiento serán las mismas.
3. Debido a que la presión será la misma en ambos lugares, la densidad del gas deberá ser la misma.
Ing. Francisco Ruffa 36
Por lo tanto deducimos que existe continuidad en la velocidad de volumen [metro3 / seg], por lo que es conveniente hacer que:
1. Fluya la velocidad de volumen U
2. Caiga la presión p
En este caso, la analogía tipo impedancia es la más indicada.
La potencia acústica será:
W [Watts] = p (presión sonora eficaz) x U (componente en fase de la velocidad eficaz de volumen)
⎥⎦
⎤⎢⎣
⎡s
m3
⎥⎦⎤
⎢⎣⎡
2mN
19
Ing. Francisco Ruffa 37
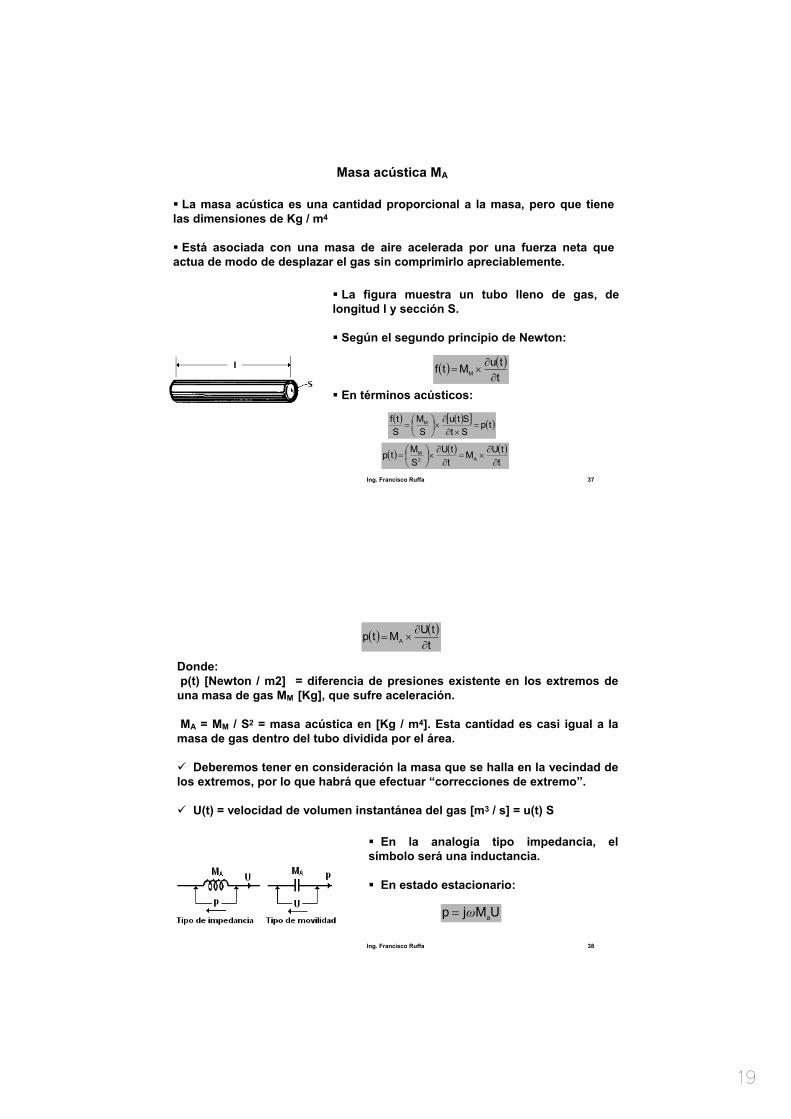
Masa acústica MA
La masa acústica es una cantidad proporcional a la masa, pero que tienelas dimensiones de Kg / m4
Está asociada con una masa de aire acelerada por una fuerza neta queactua de modo de desplazar el gas sin comprimirlo apreciablemente.
La figura muestra un tubo lleno de gas, de longitud l y sección S.
Según el segundo principio de Newton:
En términos acústicos:
( ) ( )ttuMtf M ∂
∂×=
( ) ( )[ ] ( )tpStStu
SM
Stf M =
×∂∂
×⎟⎠⎞
⎜⎝⎛=
( ) ( ) ( )ttUM
ttU
SMtp A2
M
∂∂
×=∂
∂×⎟⎠⎞
⎜⎝⎛=
Ing. Francisco Ruffa 38
Donde:p(t) [Newton / m2] = diferencia de presiones existente en los extremos de
una masa de gas MM [Kg], que sufre aceleración.
MA = MM / S2 = masa acústica en [Kg / m4]. Esta cantidad es casi igual a la masa de gas dentro del tubo dividida por el área.
Deberemos tener en consideración la masa que se halla en la vecindad de los extremos, por lo que habrá que efectuar “correcciones de extremo”.
U(t) = velocidad de volumen instantánea del gas [m3 / s] = u(t) S
En la analogía tipo impedancia, el símbolo será una inductancia.
En estado estacionario:
( ) ( )ttUMtp A ∂
∂×=
UMjp aω=
20
Ing. Francisco Ruffa 39
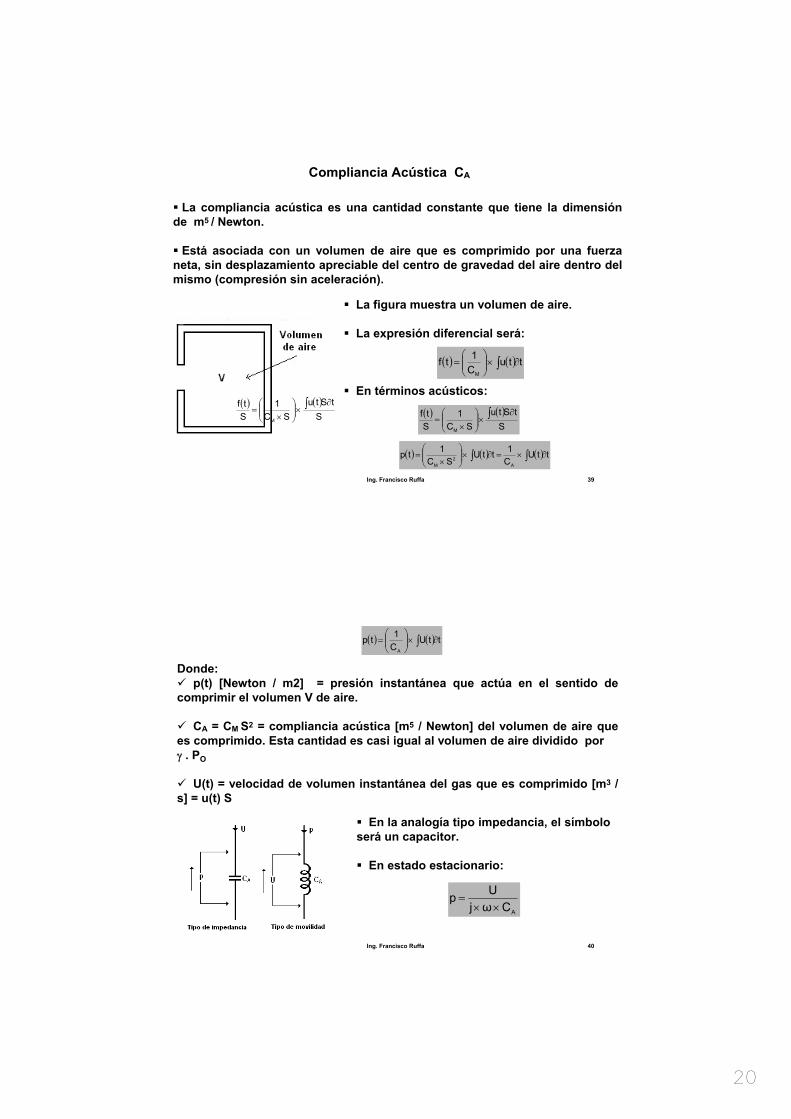
Compliancia Acústica CA
La compliancia acústica es una cantidad constante que tiene la dimensiónde m5 / Newton.
Está asociada con un volumen de aire que es comprimido por una fuerzaneta, sin desplazamiento apreciable del centro de gravedad del aire dentro del mismo (compresión sin aceleración).
La figura muestra un volumen de aire.
La expresión diferencial será:
En términos acústicos:
( ) ( ) ttuC1tf
M
∂×⎟⎟⎠
⎞⎜⎜⎝
⎛= ∫
( ) ( ) ( ) ttUC1ttU
SC1tp
A2
M
∂×=∂×⎟⎟⎠
⎞⎜⎜⎝
⎛×
= ∫∫
( ) ( )S
tStuSC
1Stf
M
∂×⎟⎟⎠
⎞⎜⎜⎝
⎛×
= ∫( ) ( )
StStu
SC1
Stf
M
∂×⎟⎟⎠
⎞⎜⎜⎝
⎛×
= ∫
Ing. Francisco Ruffa 40
Donde: p(t) [Newton / m2] = presión instantánea que actúa en el sentido de
comprimir el volumen V de aire.
CA = CM S2 = compliancia acústica [m5 / Newton] del volumen de aire quees comprimido. Esta cantidad es casi igual al volumen de aire dividido porγ . PO
U(t) = velocidad de volumen instantánea del gas que es comprimido [m3 / s] = u(t) S
En la analogía tipo impedancia, el símboloserá un capacitor.
En estado estacionario:
( ) ( ) ttUC1tp
A
∂×⎟⎟⎠
⎞⎜⎜⎝
⎛= ∫
ACωjUp××
=
21
Ing. Francisco Ruffa 41
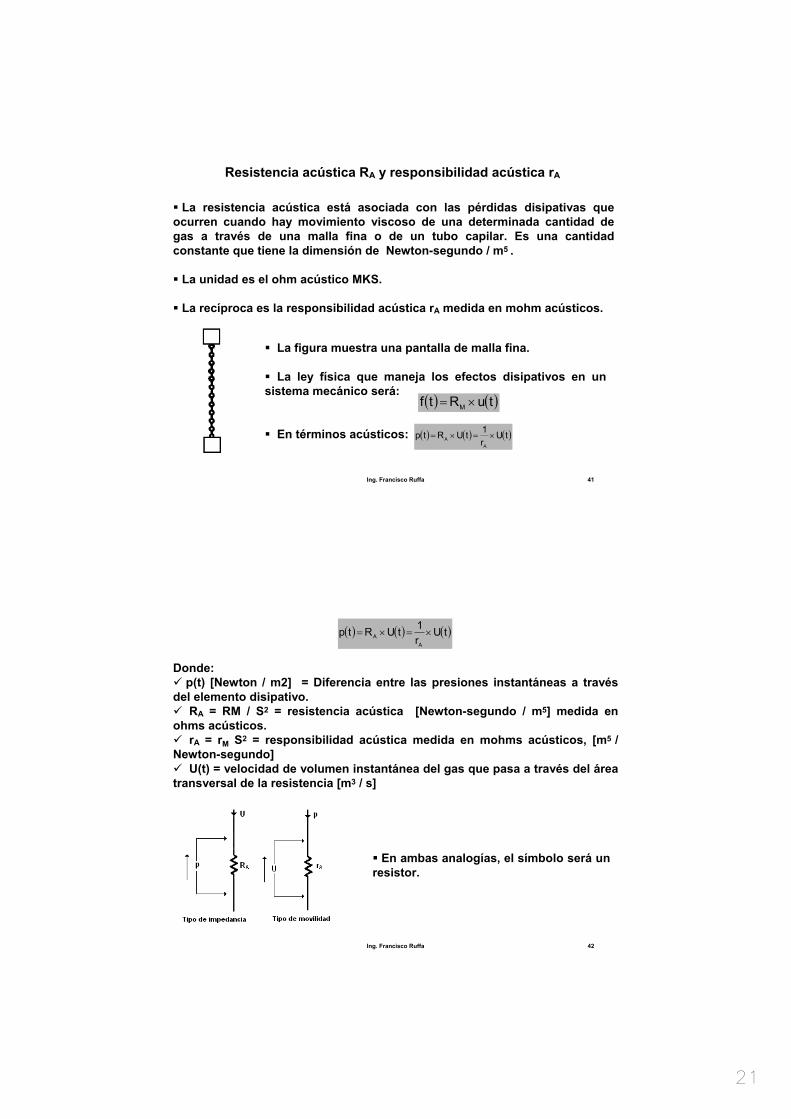
Resistencia acústica RA y responsibilidad acústica rA
La resistencia acústica está asociada con las pérdidas disipativas queocurren cuando hay movimiento viscoso de una determinada cantidad de gas a través de una malla fina o de un tubo capilar. Es una cantidadconstante que tiene la dimensión de Newton-segundo / m5 .
La unidad es el ohm acústico MKS.
La recíproca es la responsibilidad acústica rA medida en mohm acústicos.
La figura muestra una pantalla de malla fina.
La ley física que maneja los efectos disipativos en un sistema mecánico será:
En términos acústicos:
( ) ( )tuRtf M ×=
( ) ( ) ( )tUr1tURtpA
A ×=×=
Ing. Francisco Ruffa 42
Donde: p(t) [Newton / m2] = Diferencia entre las presiones instantáneas a través
del elemento disipativo. RA = RM / S2 = resistencia acústica [Newton-segundo / m5] medida en
ohms acústicos.rA = rM S2 = responsibilidad acústica medida en mohms acústicos, [m5 /
Newton-segundo] U(t) = velocidad de volumen instantánea del gas que pasa a través del área
transversal de la resistencia [m3 / s]
En ambas analogías, el símbolo será un resistor.
( ) ( ) ( )tUr1tURtpA
A ×=×=

22
Ing. Francisco Ruffa 43
Generadores acústicos
Los generadores ácústicos pueden ser del tipo de velocidad de volumenconstante o del tipo de presión constante.
Los motores primarios serán del tipo:
Generador de presión constante
Generador de fuerza constante
Ing. Francisco Ruffa 44
Alternativas
Ref: “Acústica” - Leo L. Beranek

23
Ing. Francisco Ruffa 45
Conversión de la analogía tipo movilidad a la del tipo impedancia
Ref: “Acústica” - Leo L. Beranek
Ing. Francisco Ruffa 46
[Kg / m4 ]
[m / N5 ]
ELÉCTRICO MECÁNICO ACÚSTICO
Unidad Símbolo
Unidad Símbolo
Unidad Símbolo
Tensión[Volt]
E Fuerza[Newton]
F Presión sonora[N/m²]
P
Corriente[Ampere]
I Velocidad[m/seg]
v Caudal de aire[m³/seg]
U
Carga eléctrica[Coulomb]
Q Longitud[metro]
l Volumen de aire[m³]
V
Resistencia
[Ohm]
R Resistencia mecánica[N.seg/m]
Rm Resistenciaacústica
[rayl MKS]
Ra
Inductancia[Henry]
L Masa[Kg]
Mm Inertancia Ma
Capacitancia[Farad]
C Complianciamecánica
[m/N]
Cm1/K
Complianciaacústica
Ca
24
Ing. Francisco Ruffa 47
La Tensión eléctrica (V) se corresponde con la Fuerza mecánica (Newton) y la presión sonora acústica (N / m2).
La Corriente (A) equivale a la Velocidad mecánica (m / seg.), y al Caudal de aire (m2 / seg.) o a la Velocidad de volumen, en la acústica.
Por ejemplo, el caudal de aire desplazado por el cono de un altoparlante.
La Carga eléctrica, en Coulombs, tiene su equivalente mecánico en el Desplazamiento o Longitud, en metros.
En acústica equivale al Volumen de aire, en metros cúbicos, también denominado desplazamiento de volumen.
La Inductancia (Henry), del modelo eléctrico, se corresponde con la Masa mecánica (Kg), y la Inertancia o Masa acústica (Kg/m4).
Ing. Francisco Ruffa 48
La Capacitancia (Farad), tiene su equivalente mecánico en la Complianciamecánica (m/N), que podemos interpretar como la inversa de la constante elástica de un resorte K, es decir un resorte muy duro tendrá una compliancia pequeña.
En el mundo acústico este efecto se conoce con el nombre de Complianciaacústica; parámetro que se utiliza, por ejemplo, para especificar cuán “blando” es el movimiento de un diafragma.
En cuanto a la Resistencia acústica, equivalente del mismo nombre en los otros modelos, podemos decir que generalmente se trata de un rozamiento mecánico producido en el sistema, que reduce el caudal o velocidad del volumen (equivalente acústico de la corriente), para una presión sonora dada (equivalente a la tensión eléctrica).

25
Ing. Francisco Ruffa 49
Las figuras muestran el esquema impedancia de un circuito eléctrico en conexión serie (A), su dual (B) en diagrama de admitancia y las analogías mecánicas de fuerza (C) y de velocidad (D).
Ejemplo 1
A C
B D
Ing. Francisco Ruffa 50
La figura muestra el mecanismo de correlación entre las analogías eléctricas y mecánicas y sus respectivos duales, donde:
Correlación de analogías
Ev = Sistema eléctrico de tensiones.
Iv = Sistema eléctrico de corrientes.
Mv = Sistema mecánico de velocidades.
Mf = Sistema mecánico de fuerzas.

26
Ing. Francisco Ruffa 51
Establecidos los circuitos comunes utilizados en analogías, sus símbolos y equivalencias, debemos analizar los componentes básicos de los circuitos mecano - acústicos, a fin de comprender el comportamiento de los mismos.
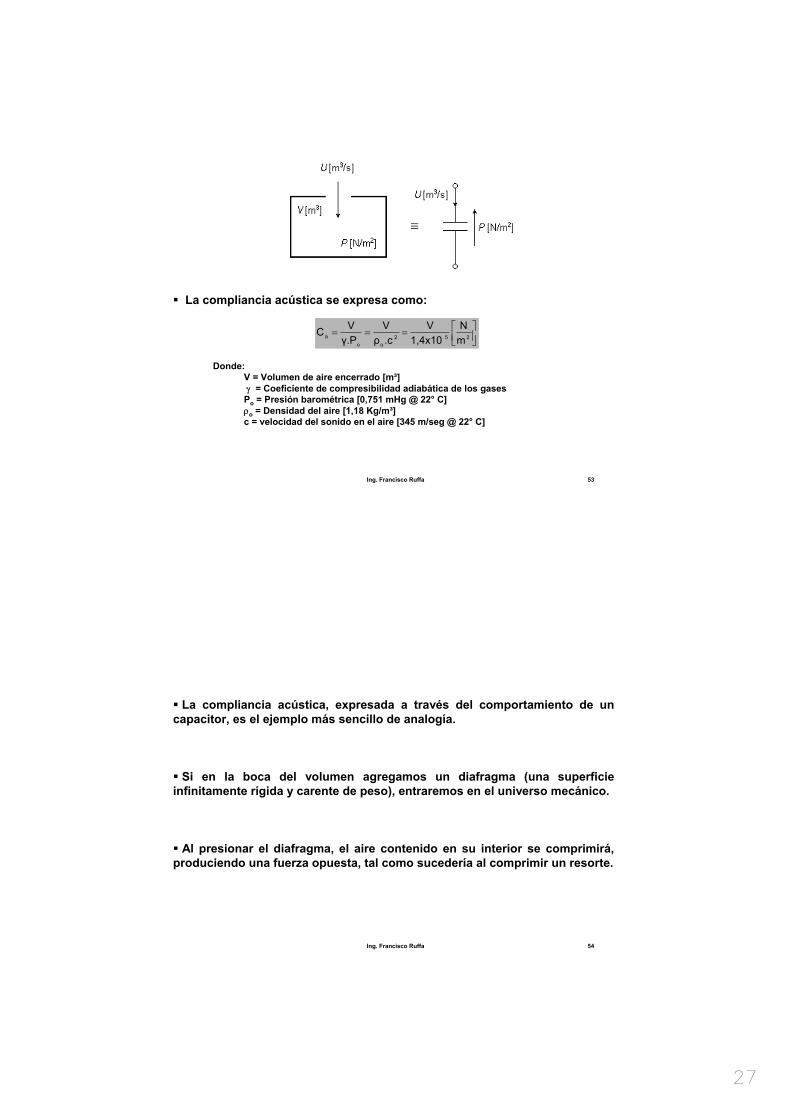
Volumen encerrado: Compliancia acústica
Analizaremos un elemento simple: el volumen de aire contenido en unacaja que posee un agujero por donde el mismo puede entrar y salir.
Dentro de ésta, existirá una presión acústica relacionada con el caudal de aire en movimiento.
El sistema equivale a un capacitor donde el volumen de aire encerrado se corresponde con la carga acumulada, y la presión en el interior con la tensión entre placas.
Elementos acústicos básicos
Ing. Francisco Ruffa 52
Como sabemos, el caudal de aire (corriente) será máximo en el instante inicial, llegando a anularse una vez que la presión en la caja (tensión entre placas) iguale a la externa (tensión de fuente).
En ese momento, el aire en el interior impedirá el ingreso de mas aire, es decir habrá agotado su capacidad, o su compliancia acústica.
Al igual que en un capacitor, el caudal U y la presión P se hallarán a 900
entre sí, con el caudal adelantado respecto a la presión.
27
Ing. Francisco Ruffa 53
Donde:V = Volumen de aire encerrado [m³]γ = Coeficiente de compresibilidad adiabática de los gases Po = Presión barométrica [0,751 mHg @ 22° C]ρo = Densidad del aire [1,18 Kg/m³]c = velocidad del sonido en el aire [345 m/seg @ 22° C]
La compliancia acústica se expresa como:
⎥⎦⎤
⎢⎣⎡=== 252
ooa m
N1,4x10
V.cρV
γ.PVC
Ing. Francisco Ruffa 54
La compliancia acústica, expresada a través del comportamiento de un capacitor, es el ejemplo más sencillo de analogía.
Si en la boca del volumen agregamos un diafragma (una superficieinfinitamente rígida y carente de peso), entraremos en el universo mecánico.
Al presionar el diafragma, el aire contenido en su interior se comprimirá, produciendo una fuerza opuesta, tal como sucedería al comprimir un resorte.

28
Ing. Francisco Ruffa 55
Conducto largo: Masa acústica o inertancia
El concepto de conducto largo proviene de la necesidad de una simplificación del modelo, tal es la de despreciar los efectos de borde.
Si consideramos además que el sistema es ideal es decir, sin pérdidas, el caudal de entrada será igual al de salida.
Asimilando el concepto a la velocidad de volumen del aire (corriente en el universo eléctrico), el tubo largo se comportará como un inductor eléctrico, que en el mundo acústico lo denominamos masa acústica o inertancia.
Ing. Francisco Ruffa 56
La masa acústica o inertancia se define como:
Donde:
l = longitud del conducto [m]
ρo = Densidad del aire [1,18 Kg/m³]
A = Superficie de la sección del conducto [m²]
Al.ρM o
a =

29
Ing. Francisco Ruffa 57
Cuando el conducto es corto, se deberá hacer una corrección de extremo a la longitud l del caso del conducto largo visto anteriormente, que dependeráde la forma en que termina el tubo y de su sección.
En estos casos, la longitud efectiva del tubo (le), será:
le = l + corrección de extremo
Esta corrección es necesaria, dado que la masa de aire encerrada en el tubo no termina abruptamente al finalizar este, sino que se prolongará hacia afuera, continuando por inercia el movimiento molecular.
Conducto corto
Ing. Francisco Ruffa 58
De acuerdo al tipo de extremo, analizaremos dos casos:
A. Tubo que termina en una pared:
l
Si el tubo es de sección circular:Donde: r = radio del tubo
Si no es circular, se toma:
B. Tubo con extremo libre:
r
0,85rlle +=
0,61rlle +=
πAr =

30
Ing. Francisco Ruffa 59
El resonador de Helmholtz, elemento acústico de absorción ya estudiadooportunamente, se resuelve mediante la aplicación de circuitosequivalentes.
El cálculo de su frecuencia de resonancia puede hacerse con los parámetros de las ecuaciones de sus componentes.
El resonador surge de la combinación de una caja, conteniendo un volumen de aire encerrado, y un tubo corto con extremos de pared, por el cual este puede entrar y salir.
Resonador de Helmholtz
Ing. Francisco Ruffa 60
La longitud efectiva del tubo, considerando ambos extremos, es:
Nota : el número 2 indica que el tubo tiene dos extremos.
Los valores de Ma y Ca se calculan mediante las ecuaciones:
Aoρ)Al(
Aoρle=Ma
⋅+=
⋅2coρ
V=Ca⋅
AlA2x0,85lLe +≅+=π
AlA2x0,85lLe +≅+=π

31
Ing. Francisco Ruffa 61
Reemplazando en la ecuación que da la frecuencia de resonancia para un circuito LC:
CaMaπ21
CLπ21f
⋅⋅⋅=
⋅⋅⋅=
Reemplazando los valores de Ma y Ca y simplificando:
)Al(VA)seg/m(3000
)Al(Vπ4Acf
22
2
22
+⋅
⋅=
+⋅⋅⋅
⋅=
Ing. Francisco Ruffa 62
Un diafragma ideal es una membrana indeformable y sin peso, moviéndose a una velocidad U, que permite la conversión mecano- acústica de la energía.
Concepto de diafragma
Para poder comunicar un movimiento a las moléculas de aire, debemos tener una superficie S,sobre la que aplicamos una fuerza f, permitiendo que esta presión se convierta en una variación del volumen de aire.
De este modo la energía mecánica se transforma en energía acústica.
Pared
Diafragma de superficie S
f U

32
Ing. Francisco Ruffa 63
El comportamiento de un diafragma, desde el punto de vista acústico –mecánico, puede resumirse en la siguiente tabla:
ACÚSTICA MECÁNICA
presión P f / S
caudal U S . u
En este caso, es aplicable el modeloeléctrico de un transformador, donde el áreadel diafragma S, cumplirá las funciones de relación de transformación.
Ing. Francisco Ruffa 64
Considerando que las impedancias se relacionan a través de S2,tendremos que el pasaje de un modelo a otro, estará dado por:
ACÚSTICA MECÁNICA
inertancia Ma Mm / S²
compliancia Ca Cm.S²
Este concepto puede ser utilizado para relacionar impedancias acústicasque se hallen caracterizadas por las superficies que transmiten presiónsonora.
De allí que se utilicen en bocinas, a fin de adaptar la alta impedancia de salida de un diafragma de compresión a la impedancia del aire, que esconstante.
33
Ing. Francisco Ruffa 65
Para frecuencias donde el largo de la bocina es superior a media longitud de onda (l > λ/2), se cumple la siguiente relación:
Zd . A = Za . S
Donde:Zd = Impedancia de salida del diafragmaA = Superficie del diafragma = Superficie de entrada de la bocinaZa = Impedancia característica del aire = 407 rayls MKSS = Superficie de salida de la bocina
Por lo tanto, se podrá incrementar la presión sonora P, mediante el aumento de la impedancia Z, para un caudal constante U, según la siguiente relación, equivalente a la Ley de Ohm en acústica:
P = U . Z