ПЛ-7+ПЛ-8 Програмирање...
29
1 ПЛ- 7+ 7+ ПЛ ПЛ- 8 8 Програмирање Програмирање вишеосне вишеосне обраде обраде МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012 http://cent.mas.bg.ac.rs http://www.mas.bg.ac.rs http://cent.mas.bg.ac.rs/nastava/ma_bsc/indexnma.htm Машински факултет Београд Катедра за производно машинство МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
Transcript of ПЛ-7+ПЛ-8 Програмирање...

1
ППЛЛ--7+7+ПЛПЛ--8 8 ПрограмирањеПрограмирање
вишеосневишеосне обрадеобраде
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
http://cent.mas.bg.ac.rs
http://www.mas.bg.ac.rs
http://cent.mas.bg.ac.rs/nastava/ma_bsc/indexnma.htm
Машински факултетБеоград
Катедра за производномашинство
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

2
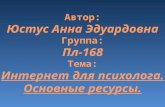
KUKA роботи
Staubli роботи
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

3
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

4
Едукациони
Комплет за
Програмирање
Машина алатки
Активирани ресурси
за рад на
лабораторијској
Вежби програмирања
LOLA 50
Testbed za višeosnu obradu glodanjem na bazi robota
• 5 – osna VG (XYZAB)• Rekonfigurabilan• OAC, PC Linux EMC2• Programiranje u G kodu• Postojeći CAD/CAM
sistemi• Virtuelni robot (Python)
38. JUPITER konferencija38. JUPITER konferencija

5
Кинематички модел LOLA50 робота за петоосну обрадукао вертикалне петоосне глодалице
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

6
са додатним обртним и транслаторним осама
CAD модели обрадног система завишеосну обраду роботом
CAD модели обрадног системаза вишеосну обраду роботом
са додатним транслаторним осама
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

7
Кинематички модел обрадног система на бази робота
Виртуелни робот
(Python)
Концепт управљачкогсистема је на бази EMC2
(Enhanced Machine Controller),
софтвера и PC хардвера, који ће омгогућити
програмирање у G-коду

8
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
Верификација програма у CAD/CAM (Pro/Engineer) окружењу
Полази се од CAD модела за који се у CAD/CAM систему(Pro/Engineer) генерише путања алата - CLF и врши верификација уVeriCUT oкружењу.
Постпроцесирање се врши као за петоосну хоризонталну иливертикалну глодалицу.

9
Sistem upravljanja otvorene arhitekture• Upravljački sistem bazran na PC
real-time Linux platformi i EMC2 upravljačkom softveru
• Upravljanje za mašine sa serijskom i sa paralelnom kinematikom
• Podržava pogone sa koračnimmotorima i sa servosistemima
• Implementirane virtuelne mašine za verifikaciju programa
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
Пример верификације програма на виртуелној машини u EMC 2 окружењу

10
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
• Моделирање делаза обраду
• Дефинисањеприпремка
• Избор машине ињених параметара
• Дефинисањепараметара обраде
• Избор врсте обрадеи стратегије
• Задавање параметара, избор површина идефинисање реза
• Генерисање путањеалата (CLF)
• Симулација путањеалата
• Постпроцесирање(G-код)

11
Пример једног дела за петоосну обраду на роботу ЛОЛА50
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

12
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
Припремак
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

13
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
НУЛТА ТАЧКА
Сигурносна раван
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
5 Axis
Surface Mill

14
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

15
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
LOLA50 5Axis AB

16
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

17
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

18
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

19
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
Студентски филм са вежби
Пробна петоосна обрада

20
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
Обрада пробног дела
Обрада главе (троосна)
Обрада лопатице

21
• За задати деоприпремити CAD моделу расположивом CADсофтверу.
• Припремити радионичкицртеж дела.
• Припремити програм завишеосну обрадуприменом CAD/CAM система
• Комплетирати извештај.
• За задати део (1,2, 3) припремити CAD модел урасположивом CADсофтверу.
• Припремак 200х200х50mm• Све мере усвојити
самостално тако да сеуклопе у мере припремка.
• Припремити радионичкицртеж дела.
• Припремити програм завишеосну обраду применомCAD/CAM система.
200
200
50

22

23
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

24
Путања алата за завршну обраду свферне површине срца

25
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012

26
За извештај је потребно:
1. Радионички цртеж дела
2. Попунити образац PL8.01

27
$$* Pro/CLfile Version Wildfire 4.0 - M060$$-> MFGNO / MFG0003PARTNO / MFG0003$$-> FEATNO / 21MACHIN / UNCX01, 1$$-> CUTCOM_GEOMETRY_TYPE / OUTPUT_ON_CENTERUNITS / MMLOADTL / 1$$-> CUTTER / 12.000000$$-> CSYS / 1.0000000000, 0.0000000000, 0.0000000000, 0.0000000000, $
0.0000000000, 1.0000000000, 0.0000000000, 0.0000000000, $0.0000000000, 0.0000000000, 1.0000000000, 0.0000000000
MULTAX / ONSPINDL / RPM, 14000.000000, CLWRAPID GOTO / -19.4885535381, -62.4115076007, 50.0000000000, $0.1299236903, 0.4160767173, 0.9000000000...
...-0.1299236903, -0.4160767173, 0.9000000000GOTO / 25.9847380508, 83.2153434676, 50.0000000000, $-0.1299236903, -0.4160767173, 0.9000000000SPINDL / OFF$$-> END / FINI

28
%N1 S9999 M03N2 G0 Z50.N3 X-19.489 Y-62.412 A-24.811 B7.465N4 Z45.N5 G1 X-25.985 Y-83.215 Z0. F1000.N6 G93 X-22.734 Y-83.213 Z-.44 A-24.758 B6.527 F304.843N7 X-19.501 Y-83.212 Z-.819 A-24.712 B5.595 F307.193N8 X-16.276 Y-83.213 Z-1.137 A-24.674 B4.668 F308.624N9 X-13.053 Y-83.215 Z-1.397 A-24.643 B3.742 F309.249N10 X-9.806 Y-83.219 Z-1.6 A-24.62 B2.81 F307.366...
...N1775 X3.255 Y83.218 Z-1.836 A24.591 B-.933 F307.207N1776 X6.532 Y83.22 Z-1.747 A24.603 B-1.872 F305.069N1777 X9.806 Y83.219 Z-1.6 A24.62 B-2.81 F305.114N1778 X13.053 Y83.215 Z-1.397 A24.643 B-3.742 F307.373N1779 X16.276 Y83.213 Z-1.137 A24.674 B-4.668 F309.276N1780 X19.501 Y83.212 Z-.819 A24.712 B-5.595 F308.597N1781 X22.734 Y83.213 Z-.44 A24.758 B-6.527 F307.164N1782 X25.985 Y83.215 Z0. A24.811 B-7.465 F304.831N1783 G94 Z50. F1000.N1784 M05%

29
МАШИНЕ АЛАТКЕ И РОБОТИ НОВЕ ГЕНЕРАЦИЈЕ 2012
http://cent.mas.bg.ac.rs/nastava/ma_bsc/indexnma.htm