Поиск объектов на основе анализа наблюдаемой ...
15
Поиск объектов на основе анализа наблюдаемой ситуации Ким Н.В., Кузнецов А.Г. Московский авиационный институт
description
Поиск объектов на основе анализа наблюдаемой ситуации. Ким Н.В., Кузнецов А.Г. Московский авиационный институт. Цель работы. Повышение эффективности поиска объектов за счет управления поисковыми ресурсами на основе анализа ситуации. Управление поисковыми ресурсами. - PowerPoint PPT Presentation
Transcript of Поиск объектов на основе анализа наблюдаемой ...

Поиск объектов на основе анализа наблюдаемой ситуации
Ким Н.В., Кузнецов А.Г.
Московский авиационный институт

Цель работы•Повышение эффективности поиска
объектов за счет управления поисковыми ресурсами на основе анализа ситуации

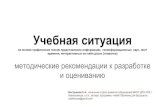
Управление поисковыми ресурсами
Район решения целевой задачи
Последовательность наблюдаемых кадров

Управление поисковыми ресурсами
Система наблюдения:•Поиск•Распознавание•Слежение
Анализ ситуаций:•Целевая функция•Свойства•Взаимные связи
B(t)
БД описания района решения
ЦЗ
Вычислитель
U(t)B(t) – видеосигналU(t) – сигналы управления на БЛА
Анализ ситуаций – определение взаимосвязей между объектами, существенными с точки зрения выполнения целевой задачи

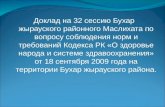
Формирование описаний ситуаций
Объекты сцены
Признаки:•поведение•положение•вероятность нахождения в области
Алгоритм сопоставления данных
Объекты сцены
Признаки:•целевая функция
Искомые объекты
Признаки:•наблюдения•поведение•положение•целевая функция•вероятность нахождения в области
Перечень объектов
БД
Координаты области поиска

Формирование описанийNobj ObjectForm ObjectSubtype
ObjectColorR
ObjectColorG
ObjectColorB
BrightnessExp
BrightnessStd Xcell Ycell X Y Probability Altitude
1 Треугольник Озеро 55 75 75 0 0 0 2 0 63 521 0 02 Многоугольник Автодорога 195 185 150 1 0 0 1 120 158 364 0 03 C-образная Лес 20 65 35 0 0 2 0 90 491 134 0 124 Овал Лес 60 90 65 0 0 1 1 90 320 284 1 135 Трапеция Озеро 10 40 65 0 0 1 1 0 303 370 1 06 Прямоугольник Лес 45 75 45 0 0 1 2 90 378 513 0 147 Прямоугольник Автодорога 200 195 170 1 0 0 3 120 35 707 0 08 Прямоугольник Лес 30 60 35 0 0 1 3 90 330 667 0 109 Прямоугольник Поле 135 125 90 0 0 0 3 -46 131 698 0 0
10 Прямоугольник Луг 105 140 90 0 0 0 0 -60 99 100 1 111 Многоугольник Луг 105 140 90 0 0 1 0 -60 297 96 0 112 Параллелограмм Автодорога 165 165 130 1 0 1 0 120 376 171 0 013 Многоугольник Автодорога 205 195 175 1 0 0 4 120 116 879 0 014 Прямоугольник Поле 150 130 95 1 0 2 4 -46 482 860 0 015 Прямоугольник Лес 50 95 60 0 0 2 5 90 439 1116 0 1016 Прямоугольник Поле 140 130 95 0 0 2 5 -46 538 1101 0 117 Прямоугольник Лес 30 60 35 0 0 2 3 90 577 722 1 1018 Параллелограмм Автодорога 175 170 150 1 0 1 3 120 342 763 0 019 Параллелограмм Автодорога 155 155 135 1 0 2 3 120 489 659 1 020 Многоугольник Поле 130 125 90 0 0 2 2 -46 497 495 1 121 Многоугольник Лес 30 70 40 0 0 2 1 90 470 299 1 10

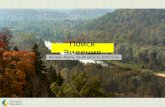
Анализ ситуации при поиске подвижных объектов
Определение типа объекта
Целевая функция объекта
Признаки поведения
Признаки наблюден.
Атрибуты объекта
Оценка возможного местоположен.объекта Алгоритм
поиска объекта

Общая структура БД подвижного объекта

Оценка информативности наблюдения
Полезная информация I = H(X)-H(XY) = Hb – Hf , Энтропия H = - Σ P(xm) log2 P(xm), Hb – начальная энтропия, Hf – конечная энтропия, P(xm) - вероятность m-го исхода из M
возможных
Пропускная способность системы C = (Hb - Hf) / T = I / T,T – длительность процесса.
Информативность q-го признака (участка) Uq на k-м такте наблюдения
Iqk = Hbk – Hfqk = - Σ P(xm)log2 P(xm) + Σ Σ P(xg) P(Uqr g) P(xmUqr)log2
P(xmUqr),
P(xm), P(xg) - вероятности реализации состояний с индексами m, g соответственно, P(Uqrxm) - условная вероятность появления признака Uqr при наличии m-го состояния.

Оценка информативности наблюденияпри отсутствии априорной вероятности

С учетом скрытностиС предполагаемым КПМ
Оценка информативности наблюденияпри различных целевых задачах объектов

Поиск объектов
Виды объектов:•Здания;•Мобильная техника;•Группы людей.

Выбор ракурса наблюдения
1)(,
, ji
jixP
))((maxarg , jixPW
W – критерий выбораобласти поиска;P – вероятностьнаблюдения объекта; – ракурс наблюденияx – объект.

Методика управления поисковыми ресурсами
•Описание цифровой карты района решения ЦЗ;•Оценка собственных координат;•Распознавание наблюдаемых объектов;•Обследование областей интереса с учетом
вероятности нахождения в них искомых объектов;
•Выход в район области интереса с углом курса, обеспечивающим максимальный обзор области.

Заключение•Предложен подход к задаче анализа
наблюдаемой сцены с учетом решаемой целевой задачи;
•Предложен вариант поиска объектов с учетом целевой функции искомых объектов;
•Предложен способ формирования описаний карты местности;
•Предложена методика управления поисковыми ресурсами.