第六章 空 间 力 系
67
第第第 第 第 第 第
description
第六章 空 间 力 系. 静 力 学. 本章重点、难点 ⒈重点 力在空间直角坐标轴上的投影和力对轴之矩。 空间力系平衡方程的应用。 常见的空间约束及约束反力。 ⒉难点 空间矢量的运算,空间结构的几何关系与立体 图。. 迎 面风 力. 侧 面风 力. b. 静 力 学. 工程中常常存在着很多各力的作用线不在同一平面内的力. 系,即空间力系,空间力系是最一般的力系。. ( a ) 图为空间汇交力系;. ( b ) 图为空间任意力系;. ( b ) 图中去掉风力后为空间平行力系。. g. b. O. q. - PowerPoint PPT Presentation
Transcript of 第六章 空 间 力 系
第六章
空 间 力 系

本章重点、难点 ⒈ 重点 力在空间直角坐标轴上的投影和力对轴之矩。 空间力系平衡方程的应用。 常见的空间约束及约束反力。 ⒉ 难点 空间矢量的运算,空间结构的几何关系与立体图。

迎 面风 力
侧 面风 力
b
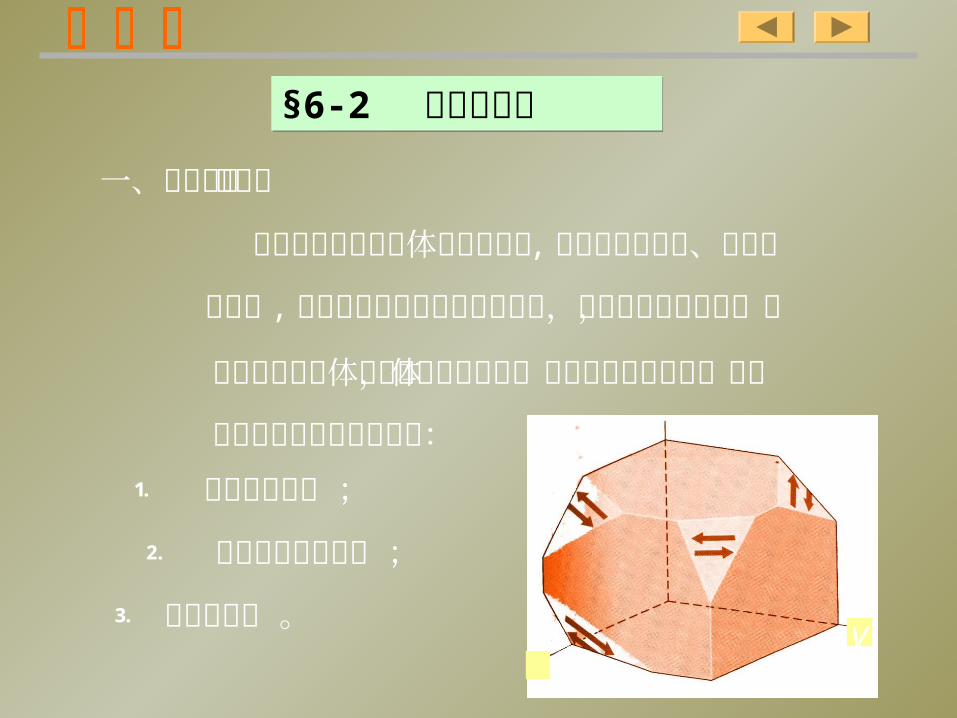
工程中常常存在着很多各力的作用线不在同一平面内的力系,即空间力系,空间力系是最一般的力系。
(a) 图为空间汇交力系;(b) 图为空间任意力系;(b) 图中去掉风力后为空间平行力系。

§6-1 空间汇交力系§6-1 空间汇交力系
或由仰角 与方位角 来确定。
1. 力在空间的表示
的接触之点。
一、力在空间轴上的投影与分解:
力的三要素:大小、方向、作用点大小:
作用点:
方向:由、、三个方向角确定
Fxy
O
FF
物体和力矢的起点或终点

⒉ 一次投影法(直接投影法)
cos
, cos
, cos
FZ
FY
FX
coscoscoscossin FFFX xy
sincossinsinsin FFFY xy
sincos FFZ
由图可知:
即:
⒊ 二次投影法(间接投影法) 当力与各轴正向间夹角不易确定时,可先将 F 投影到 xy 面上,然后再投影到 x 、 y 轴上。
三轴的方向余弦对应于力
分别称为其中:
zyxF ,,
cos,cos,cos
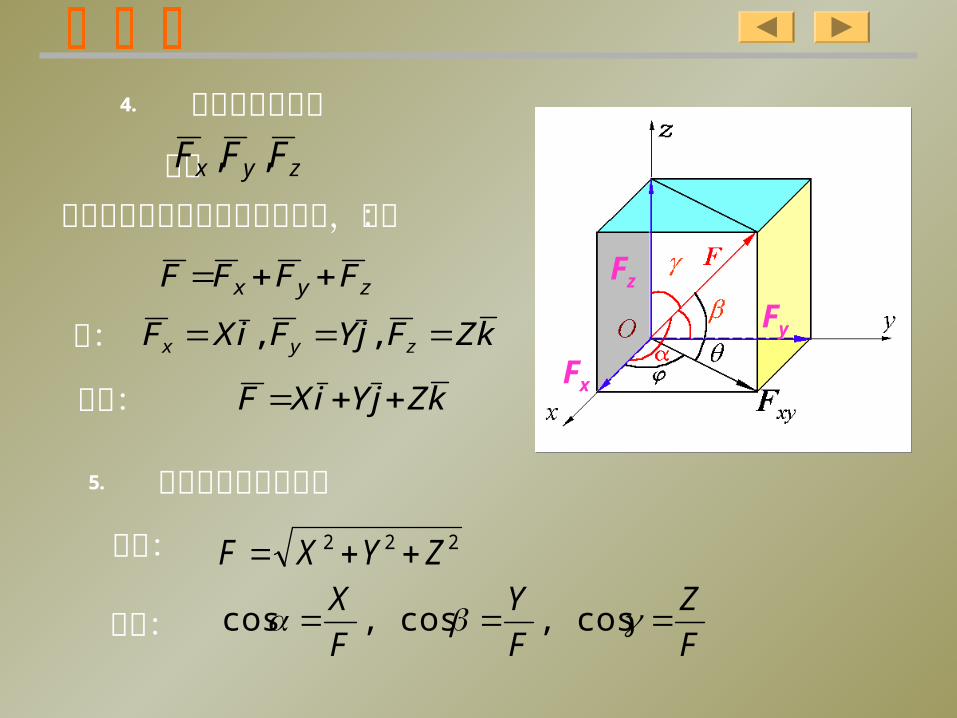
若以 表示力沿直角坐标轴的正交分量,则:
zyx FFF ,,
zyx FFFF
kZFjYFiXF zyx ,,而:
kZjYiXF 所以:Fx
Fy
Fz
⒌ 已知力的投影求该力
⒋ 力沿坐标轴分解
222 ZYXF
F
Z
F
Y
F
X cos,cos,cos
大小:
方向:

⒈ 几何法
与平面汇交力系的合成方法相同,也可用力多边形方法求合力。
in FFFFFR 321
二、空间汇交力系的合成
即:合力等于各分力的矢量和
⒍ 注意 力在坐标轴上的投影是代数量;而力沿直角坐标轴的分量及力在坐标平面上的投影是矢量。
( 由于力多边形是空间力多边形,合成并不方便,一般不采用此方法合成)

空间力系的合力在任一轴上的投影,等于各分力在同一轴上投影的代数和。
由于 代入上式kZjYiXF iiii
ix XR iy YR iz ZR
⑴ 合力投影定理⒉ 解析法
kZjYiXR iii 合力
定理 :
⑵ 合力的解析求法 222222 )()()( ZYXRRRR zyx
大小:
R
R
R
R
R
R zyx cos,cos,cos方向:
0X 0Y 0Z
解析法平衡充要条件为:
几何法平衡充要条件为该力系的力多边形封闭。
0 iFR
空间汇交力系平衡的充要条件是:力系的合力为零,即:
三、空间汇交力系的平衡
亦称为 空间汇交力系的平衡方程
三个独立的方程,只能求解三个未知量
⒈ 平衡的充要条件
⑴ 几何法平衡充要条件
⑵ 解析法平衡充要条件
§6-2 空间力偶系§6-2 空间力偶系
一、空间力偶三要素
⒈ 力偶矩的大小 ;
⒉ 力偶作用面的方位 ;
⒊ 力偶的转向 。
决定空间力偶对刚体的作用效应 , 除力偶矩的大小、力偶的
转向外 , 还必须确定力偶作用面的方位,作用面的方位不同,则
空间力偶对物体的作用效应也不同,所以空间力偶对刚体的作
用效应取决于下列三要素:
y
空间力偶三要素可以用一个矢量表示,该矢量称为力偶矩矢。
二、力偶矩用矢量表示⒈ 力偶矩矢
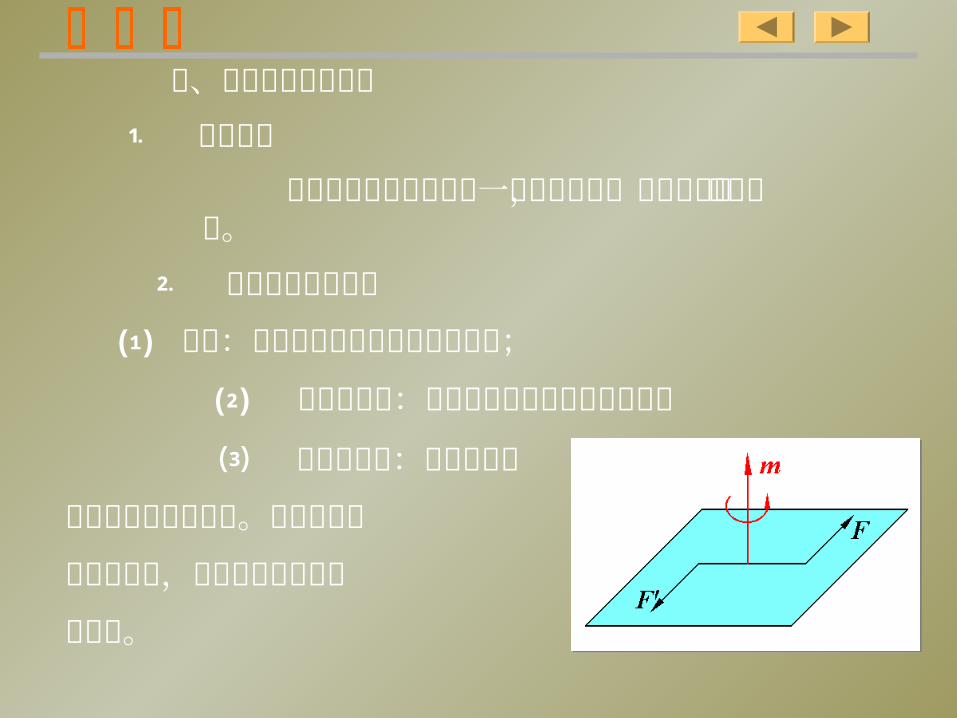
⒉ 力偶矩矢表示方法⑴ 大小:矢量的长度表示力偶矩的大小;
⑵ 矢量的方位:与力偶作用面的法线方位相同
⑶ 矢量的指向:与转向的关系服从右手螺旋定则。或从力偶矢的末端看去,力偶的转向为逆时针转向。
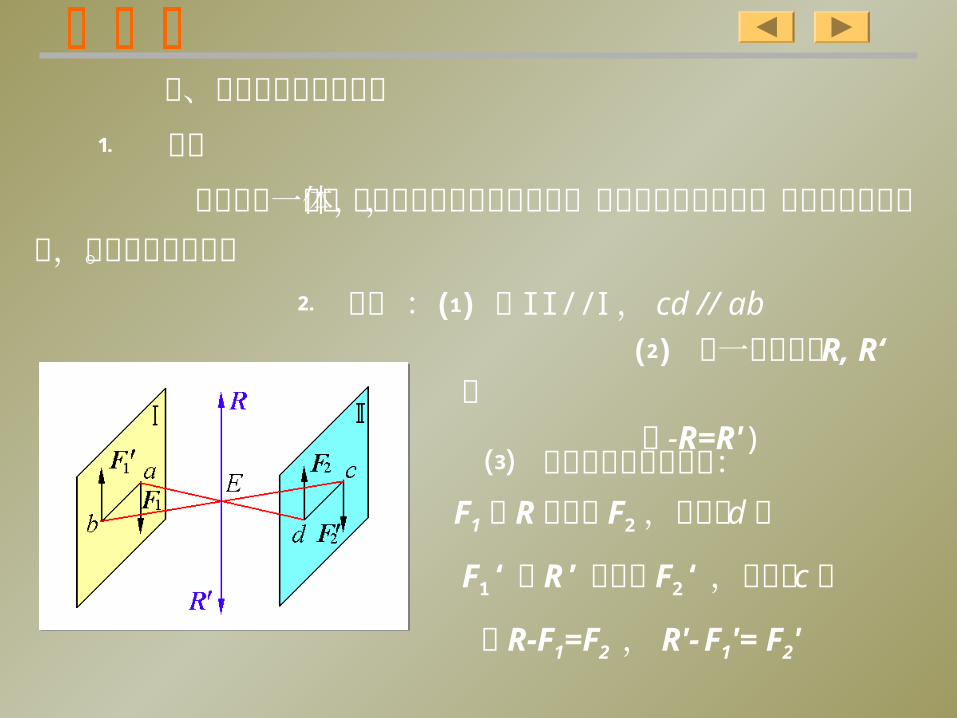
⒉ 证明 :⑴ 作 II//Ⅰ, cd // ab
⑵ 作一对平衡力 R, R‘ ( 在 E 点 , 且 使 -R=R')
作用在同一刚体的两平行平面的两个力偶,若它们的转向相同,力偶矩的大小相等,则两个力偶等效。
F1 与 R 合成得 F2 ,作用在 d 点
F1‘ 与 R’ 合成得 F2‘ ,作用在 c点
且 R-F1=F2 , R'- F1'= F2'
⑶ 由反向平行力合成得:
三、空间力偶的等效定理⒈ 定理
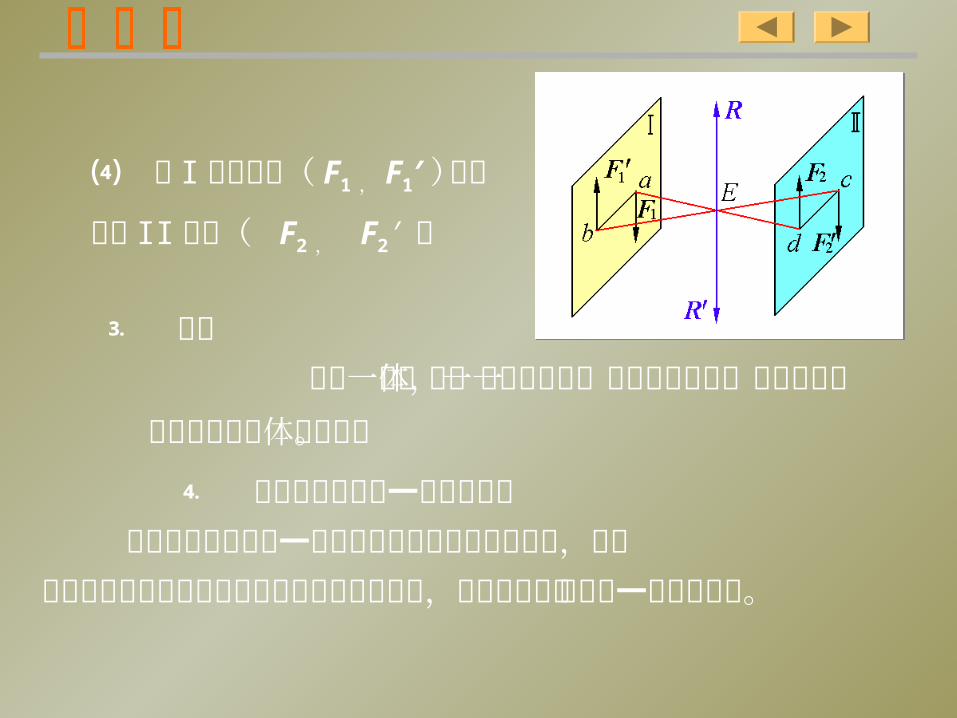
⑷ 在 I 内的力偶( F1 , F1′ )等效
变成 II 内的( F2 , F2′ )
⒊ 推论 在同一刚体内,力偶可以从一个平面移至另一平行平面而不改变它对刚体的作用。
⒋ 空间力偶矩矢是一个自由矢量 由于力偶可以在同一平面内和平行平面内任意移转,因此表示力偶矩的矩矢的矢端亦可在空间任意移动,可见空间力偶矩矢是一个自由矢量。

四、空间力偶系的合成与平衡
由于空间力偶系各力偶是自由矢量,只要不改变各分力偶
矩矢方向,将它们都滑移至某汇交点,它们的合成符合矢量合
成法则。 即:合力偶矩 = 分力偶矩的矢量和。
⒈ 合成
n
iin mmmmmm
1321 即:
m
m
m
m
m
m
mmmm
zyx
zyx
cos,cos,cos
;222大小:
方向:

投影式为:
0 x m0 y m0 z m
0 imm
显然空间力偶系的平衡条件是:
亦称为 空间力偶系的平衡方程
三个独立的方程,只能求解三个未知量
⒉ 平衡

§6-3 力对点的矩与力对轴的矩§6-3 力对点的矩与力对轴的矩一、空间力对点之矩三要素
⒈ 力矩的大小 ;
⒊ 力的作用线与矩心所组成的平面的方位 。
⒉ 力矩的转向 ;
决定力对刚体的作用效应 , 除力矩的大小、力矩的转向外 ,还须考虑力与矩心所组成的平面的方位,方位不同,则力对物体的作用效应也不同。所以空间力对刚体的作用效应取决于下列三要素:
[ 例 ] 力 P1 , P2 ,P3 对汽车反镜
绕球铰链 O 点的转动效应不同
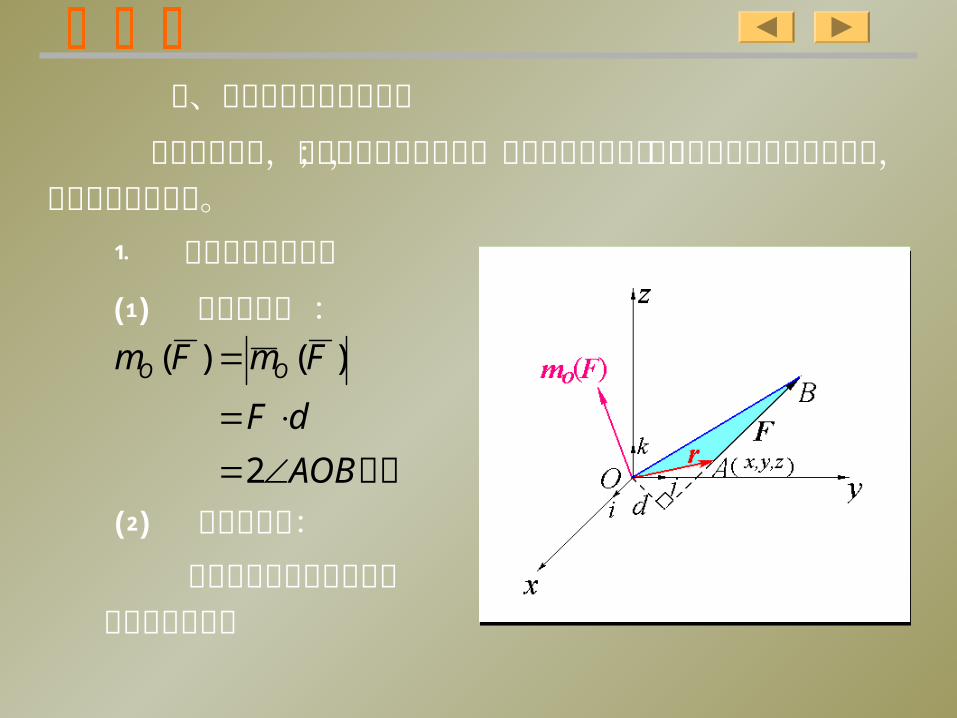
二、力对点的矩的矢量表示 在平面问题中,力对点的矩是代数量;而在空间问题中,由空间力对点的矩的三要素知,力对点的矩是矢量。
面积AOB
dF
FmFm OO
2
)()(
⒈ 力矩矢的表示方法⑴ 力矩矢大小 :
⑵ 力矩矢方位: 与该力和矩心组成的平面的法线方位相同

注意:力矩矢为定位矢量注意:力矩矢为定位矢量注意:力矩矢为定位矢量注意:力矩矢为定位矢量
⑶ 力矩矢的指向:与转向的关系服从右手螺旋定则。或从力矩矢的末端看去,物体由该力所引起的转向为逆时针转向。
⒉ 力对点的矩的矢积表达式
如果 r 表示 A 点的矢径,则:,)( FrFmO
⑴ 导出
)(
)sin(
Fm
dF
F,rFrFr
O
∵

力对点的矩等于矩心到该力作用点
的矢径与该力的矢量积。
kZjYiXF 由于 kzjyixr
ZYX
zyx
kji
FrFmO )(
方向相同,的方向和 )(FmFr O又∵.)( FrFmO ∴
⑵ 结论
⒊ 力对点的矩的解析表达式
kFmjFmiFm
kyXxYjxZzXizYyZ
zOyOxO )]([)]([)]([
)()()(

二、力对轴的矩
⒈ 实例
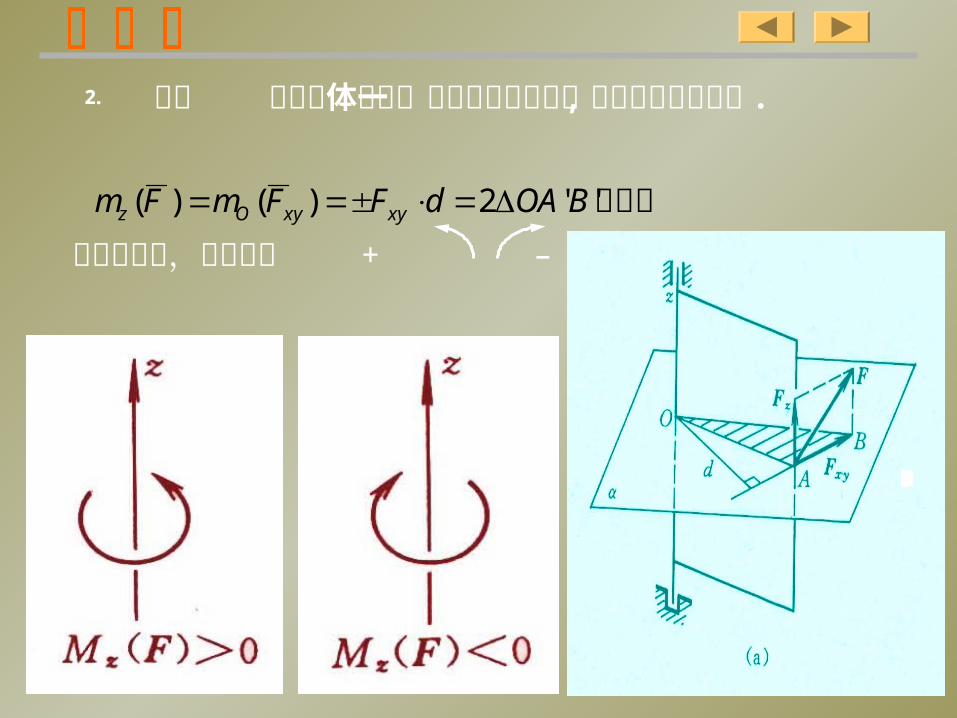
的面积''2)()( BOAdFFmFm xyxyOz
它是代数量,正负规定 + –
⒉ 定义 力使物体绕某一轴转动效应的量度 ,称为力对该轴之矩 .
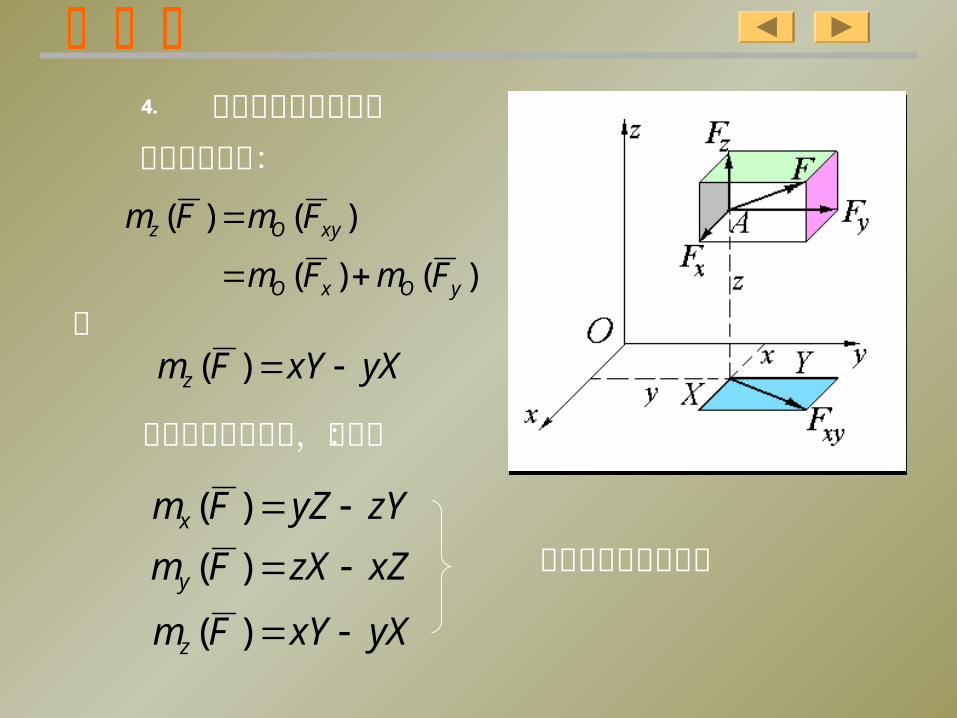
⒋ 力对轴的矩的解析式
)()(
)()(
yOxO
xyOz
FmFm
FmFm
由合力矩定理:
即yXxYFmz )(
同理可得其余两式,即有:
yXxYFm
xZzXFm
zYyZFm
z
y
x
)(
)(
)(力对轴的矩的解析式

三、力对点的矩与力对通过该点的轴之矩的关系
面积由于 AOBFmO 2)(
''2)()( BOAFmFm xyOz
通过 O 点作任一轴 Z ,则:
力对点的矩矢在通过该点的任意轴上的投影等于这力对于该轴的矩。这就是力对点之矩与对通过该点轴之矩的关系。
⒈ 定理 ⒉ 证明
''cos BOAOAB
由几何关系:
''2cos2 BOAOAB ∴
即: )(cos)( FmFm zO
)()]([ FmFm zzO
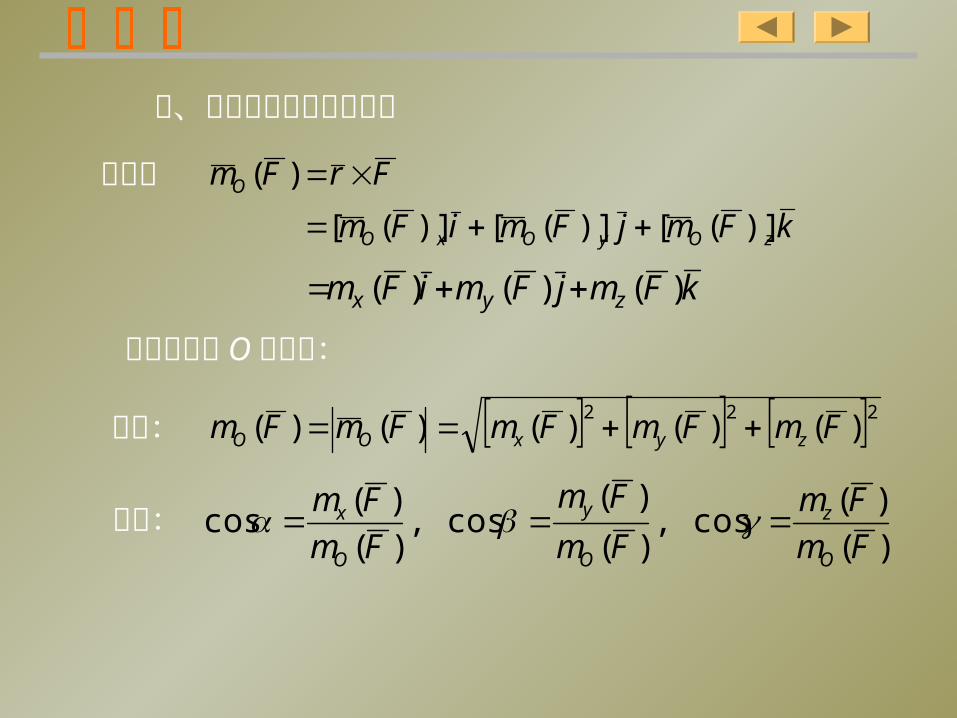
kFmjFmiFm
FrFm
zOyOxO
O
)]([)]([)]([
)(
kFmjFmiFm zyx )()()(
又由于
所以力对点 O 的矩为:
222)()()()()( FmFmFmFmFm zyxOO 大小:
)(
)(cos,
)(
)(cos,
)(
)(cos
Fm
Fm
Fm
Fm
Fm
Fm
O
z
O
y
O
x 方向:
四、力对点的矩的解析求法

把研究平面一般力系的简化方法拿来研究空间一般力系的简
化问题,但须把平面坐标系扩充为空间坐标系。
§6-4 空间一般力系向一点简化§6-4 空间一般力系向一点简化
nFFF ,, 21
设作用在刚体上有空间一般力系
试将力系向 O 点简化
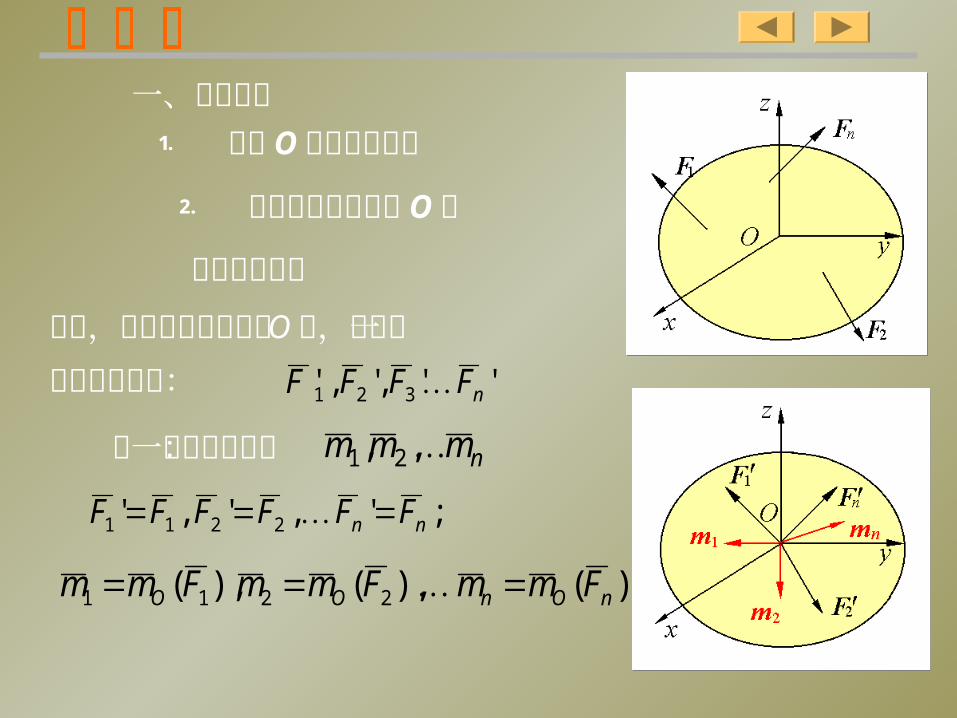
根据力线平移定理,将各力平行搬移到 O 点,得到一空间汇交力系:
.)(),(),( 2211 nOnOO FmmFmmFmm
一、简化方法 ⒈ 任选 O 点为简化中心
⒉ 将各力平行搬移到 O 点
'',',' 321 nFFFF
nmmm ,, 21和一附加力偶系:
;',',' 2211 nn FFFFFF

空间力偶是自由矢量,总可汇交于 O 点。
R
FFFF
FFFFR
in
ino
21
21
汇交力系合力⒊ 合成空间汇交力系
⒋ 合成附加力偶系
附加力偶的合力偶矩
)(
)()()( 21
21
io
nooo
ino
Fm
FmFmFm
mmmmM
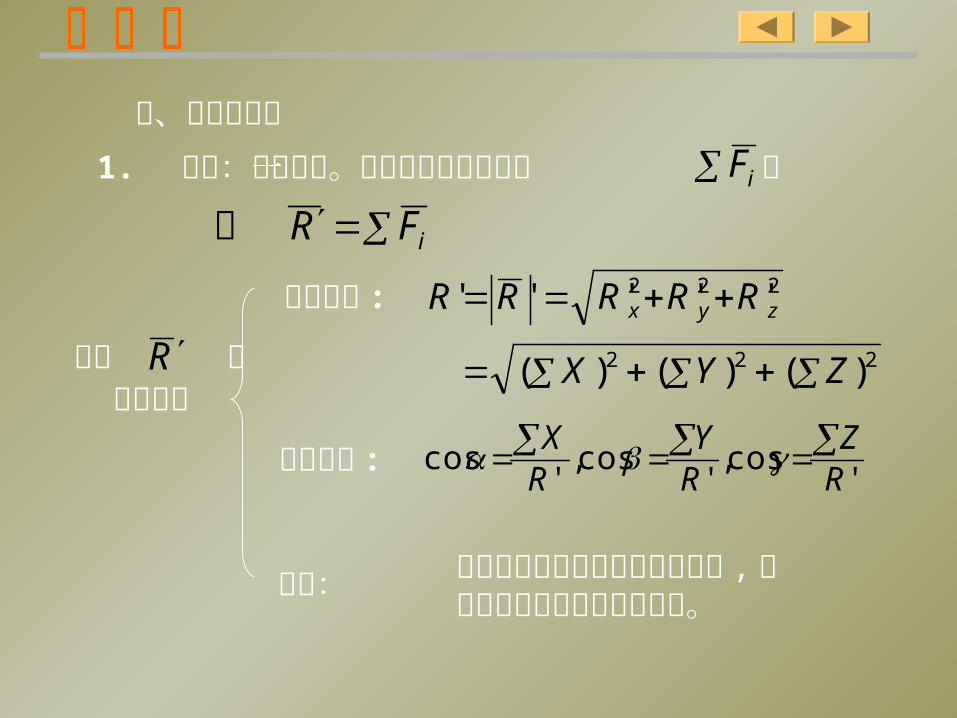
二、主矢与主矩1. 主矢:指原空间一般力系各力的矢量和 。 iF
iFR即
主矢 的R解析求法
注意: 因主矢等于原力系各力的矢量和 , 所以它与简化中心的位置无关。
主矢大小 :
222
222
)()()(
'''''
ZYX
RRRRR zyx
主矢方向 :'
cos,'
cos,'
cosRZ
RY
RX
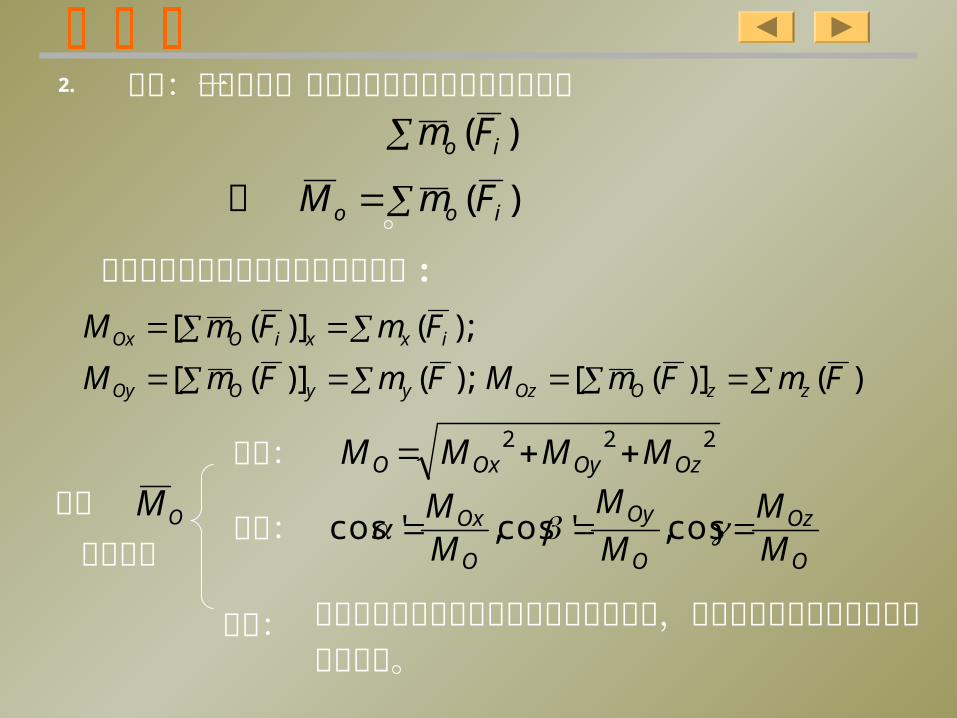
⒉ 主矩:指原空间一般力系对简化中心之矩的矢量和
。
)( io Fm
)( ioo FmM即
大小:
因主矩等于各力对简化中心之矩的矢量和,所以它的大小和方向与简化中心有关。
注意:
根据力对点之矩与力对轴之矩的关系 :
)(])([ ;)(])([
;)(])([
FmFmMFmFmM
FmFmM
zzOOzyyOOy
ixxiOOx
222OzOyOxO MMMM
主矩 OM
解析求法 O
Oz
O
Oy
O
Ox
MM
M
M
MM
cos,'cos,'cos方向:

三、结论空间一般力系向任一点 O 简化 ,一般可以得到一力和
一力偶 ;该力作用于简化中心 ,其大小及方向等于该力系的主矢 ,该力偶之矩矢等于该力系对于简化中心的主矩 。

化中心的位置有关,换个简化中心,主矩不为零 )
空间一般力系向一点简化得一主矢和主矩,下面针对主矢、主矩的不同情况分别加以讨论。
§6-5 空间一般力系简化结果的讨论§6-5 空间一般力系简化结果的讨论
若 , 则该力系平衡(下节专门讨论)。0,0' OMR
若 则力系可合成一个合力偶,其矩等于原力系
对于简化中心的主矩 MO 。此时主矩与简化中心的位置无关。
0,0' OMR
⒈ 若 则力系可合成为一个合力,力系合力0,0' OMR R
等于主矢 ,合力 通过简化中心 O 点。(此时主矩与简'R R
一、力系平衡
二、力系简化为一个合力偶
三、力系简化为一个合力

⒉ 若 , 时,OMR '0,0' OMR
由于做 iOO
O FRR
M
R
MddRM 合力,
',
)( dRMO
可进一步简化,将 MO 变成 ( R'',R) 使 R' 与 R'‘ 抵消只剩
下 R
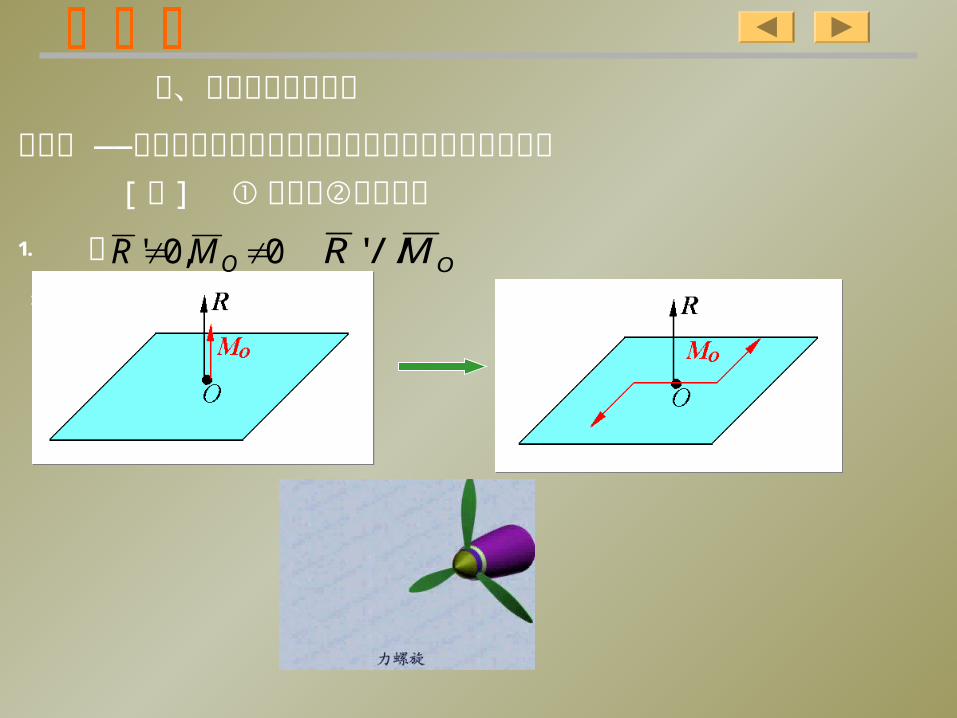
[ 例 ] ① 拧螺丝②炮弹出膛
' '
四、力系简化为力螺旋力螺旋 ——由力及垂直与该力平面内的力偶所组成的特殊力系
⒈ 若 , 时,OMR //'0,0' OMR
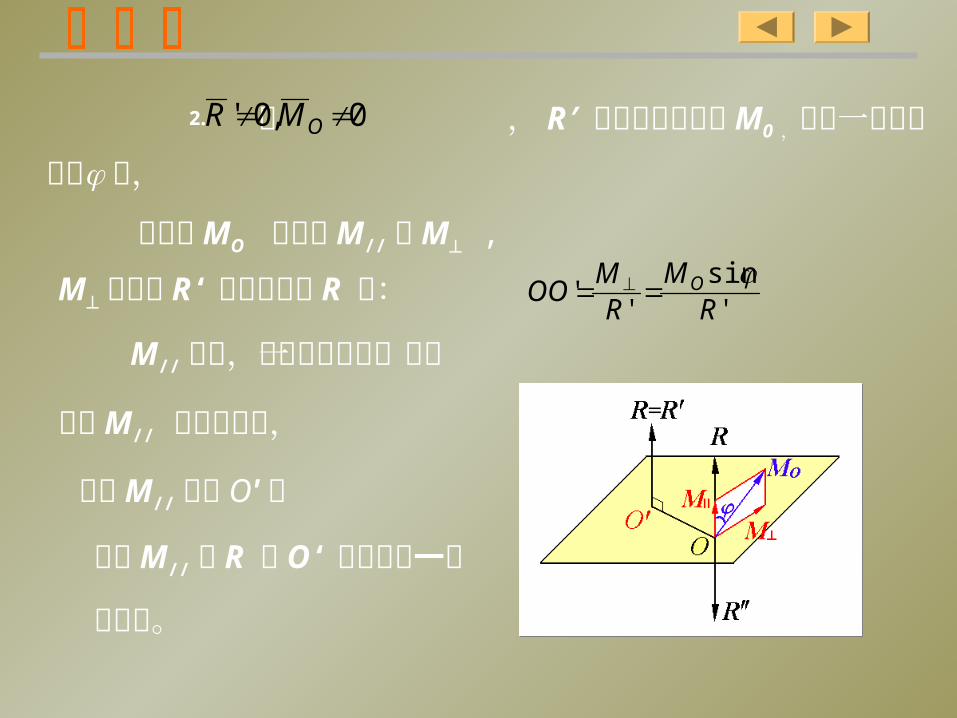
M 和主矢 R‘ 合成为合力 R 而:'
sin'
'R
MR
MOO O
所以 M// 和 R 在 O‘ 点处形成一个
力螺旋。
M// 不变,是在平面内的一力偶
⒉ 若 , R′ 不平行也不垂直 M0 ,成最一般的任意角 时,
0,0' OMR
可将 M// 搬到 O'处
因为 M// 是自由矢量,
首先把 MO 分解为 M// 和 M ,
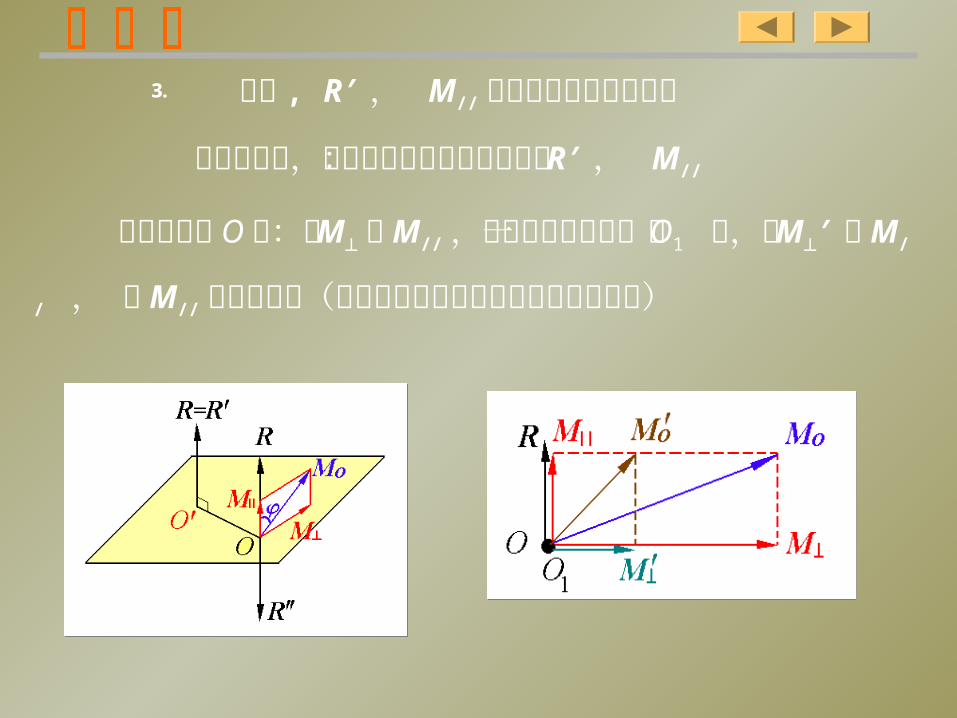
力系简化中,不随简化中心改变的量有: R′ , M//
简化中心为 O 时:有 M 和 M// ,当简化中心为另一点 O1
时,为 M′ 和 M// , 即 M// 总是不变的(它是原力系中的力偶
与简化中心无关)
⒊ 注意 , R′ , M// 是力系简化中的不变量

)(' RMROOMM OO
)( iOO FmM主矩又
)()( iOO FmRM
)()( izz FmRM常用投影式
空间力系向 O 点简化后得主矢 R′ 和主矩 MO , 若 MOR′ ,
可进一步合成为一个作用在新简化中心 O' 点的合力 R 。
五、空间力系的合力矩定理
⒉ 定理
⒈ 导出

一、空间一般力系平衡的充要条件
0)( iOO FmM00' FR
0)()()('' 222 ZYXRR
0))(())(())(( 222 FmFmFmMM zyxOO
§6-6 空间一般力系的平衡方程及应用 §6-6 空间一般力系的平衡方程及应用
空间一般力系平衡
0
0
OM
R必要
充分
力系的主矢 和主矩 都等于零,即:
R
OM
⒈ 平衡的充要条件

还有四矩式,五矩式和六矩式,同时各有一定限制条件。
0)(,0
0)(,0
0)(,0
FmZ
FmY
FmX
z
y
x
⒉ 解析法平衡充要条件
六个独立的方程,只能求解六个未知量
亦称为空间一般力系的平衡方程
三、由空间一般力系的平衡方程导出的其它方程⒈ 空间汇交力系的平衡方程
因为各力线作用都汇交于一点,各轴都通过该点,故各力矩方程都成为了恒等式。
0
0
0
Z
Y
X
三个独立的方程,只能求解三个未知量

0)(
0)(
0
Fm
Fm
Z
y
x
0
0
0)(
Y
X
Fmz
⒉ 空间平行力系的平衡方程
设各力线都 // z 轴
因此 均成为了恒等式,而自然满足。
即有: 三个独立的方程,只能求解三个未知量

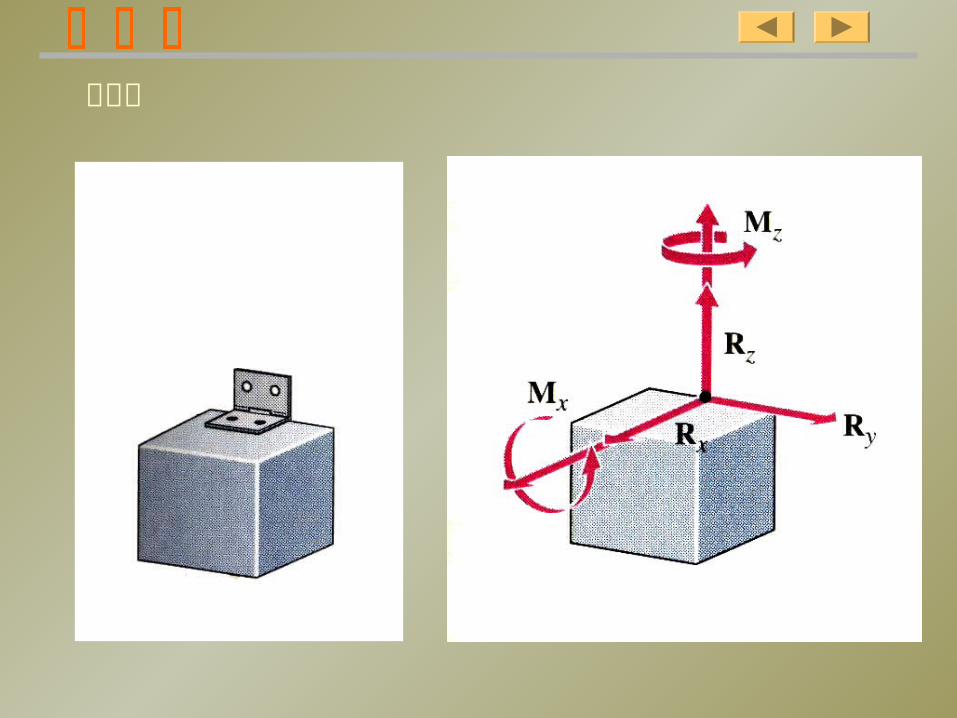
二、空间约束 观察物体在空间的六种可能的运动中(沿三轴移动和绕三轴转动) ,有哪几种运动被约束所阻碍,有阻碍就有约束反力。阻碍移动为反力,阻碍转动为反力偶。 [ 例 ]
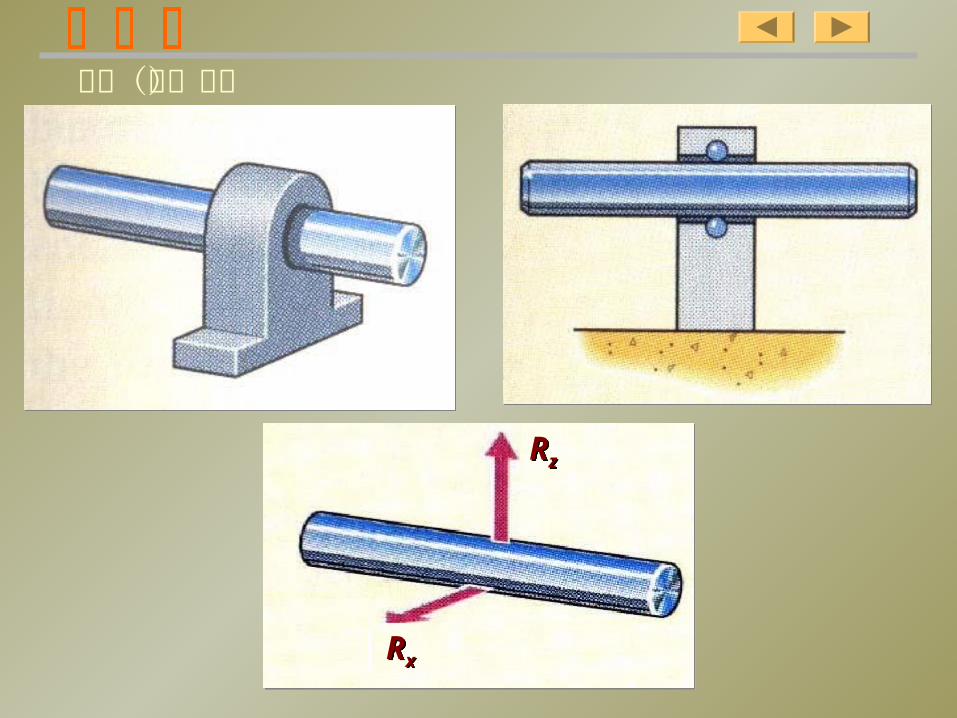
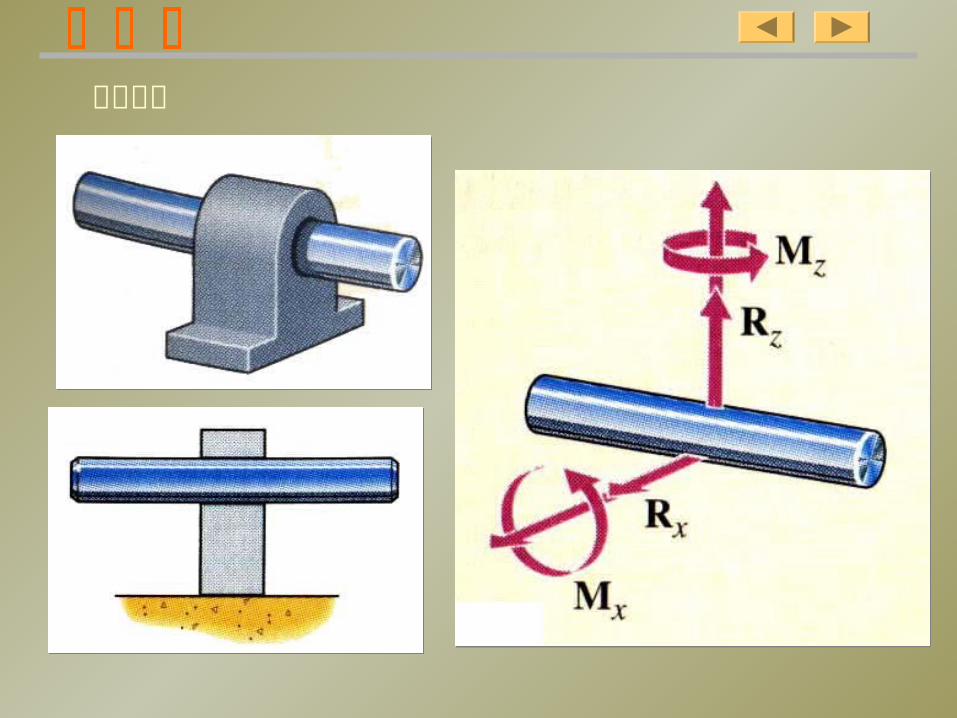
1 、球形铰链 2 、向心轴承,蝶铰链 3 、止推轴承

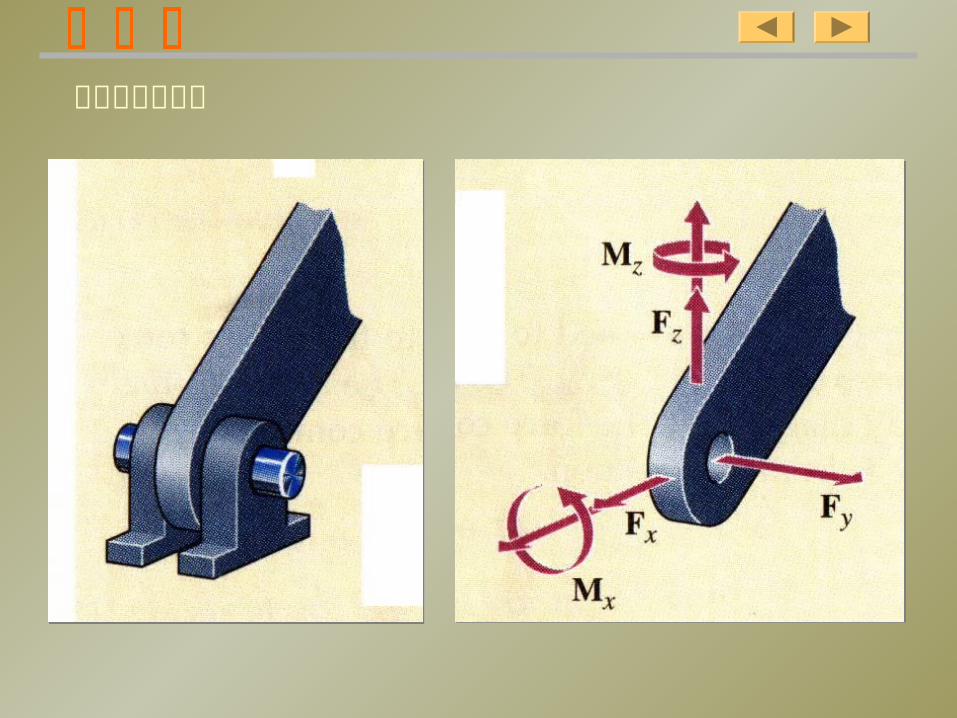
4 、带有销子的夹板 5 、空间固定端

球形铰链
RRzzRRzz
RRyyRRyy
RRxxRRxx
滚珠(柱)轴承
RzRz
RxRx
活页铰
滑动轴承
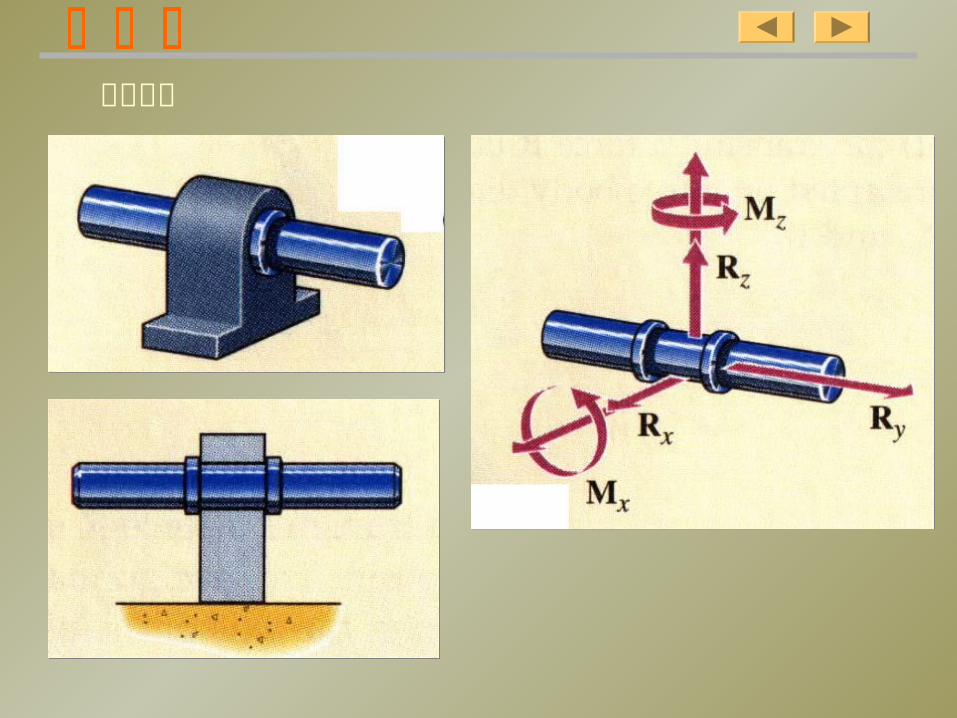
止推轴承
带有销子的夹板
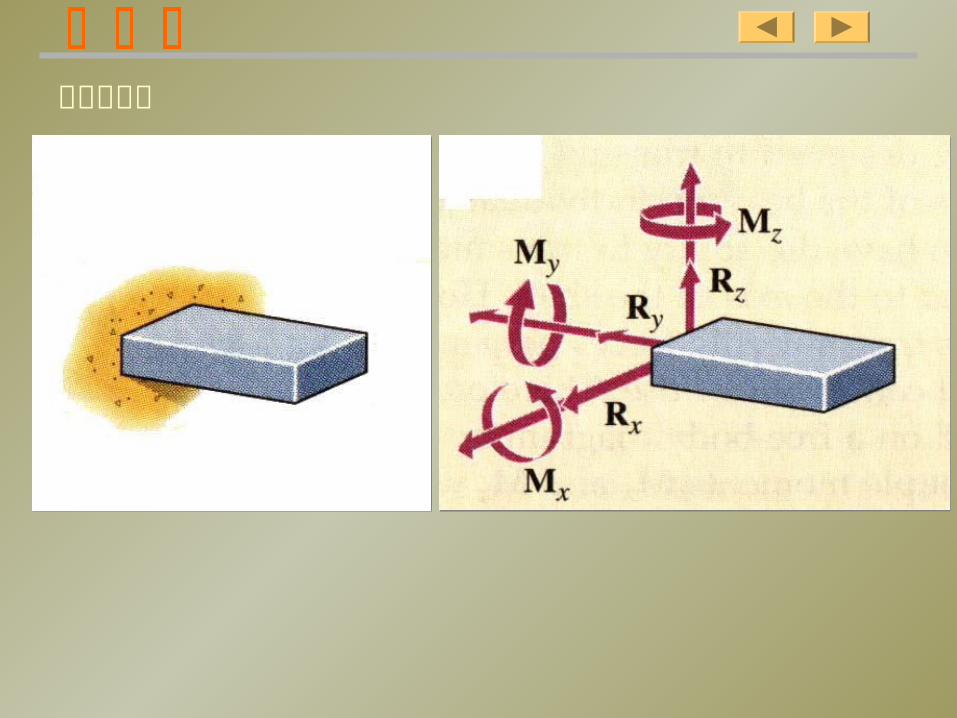
空间固定端
例 画出车床轮轴的受力图
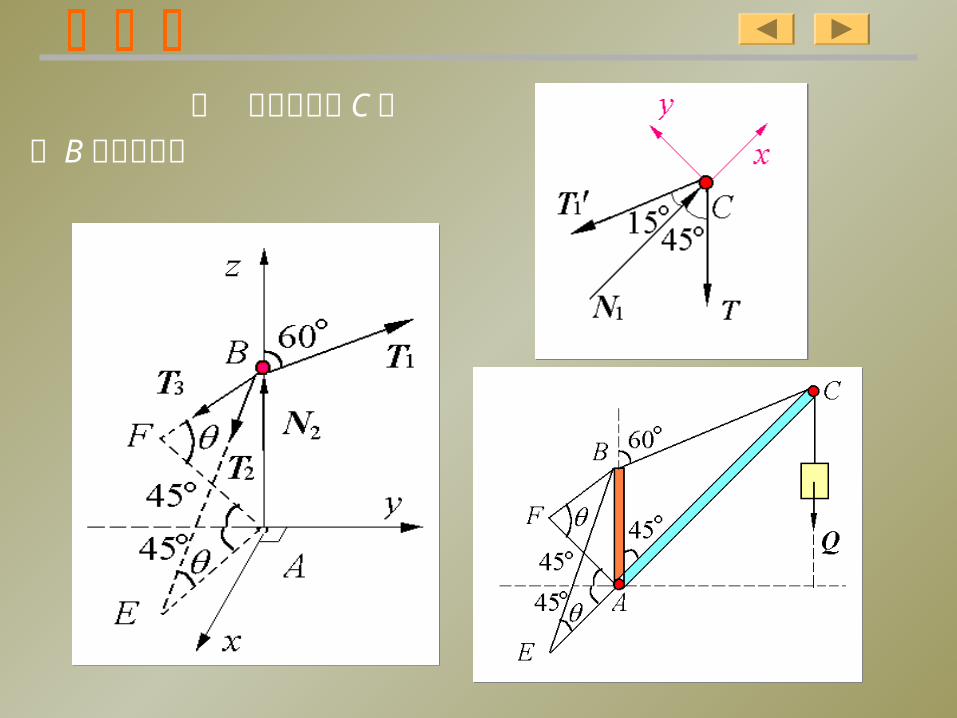
例 画出起重机 C 点和 B 点的受力图

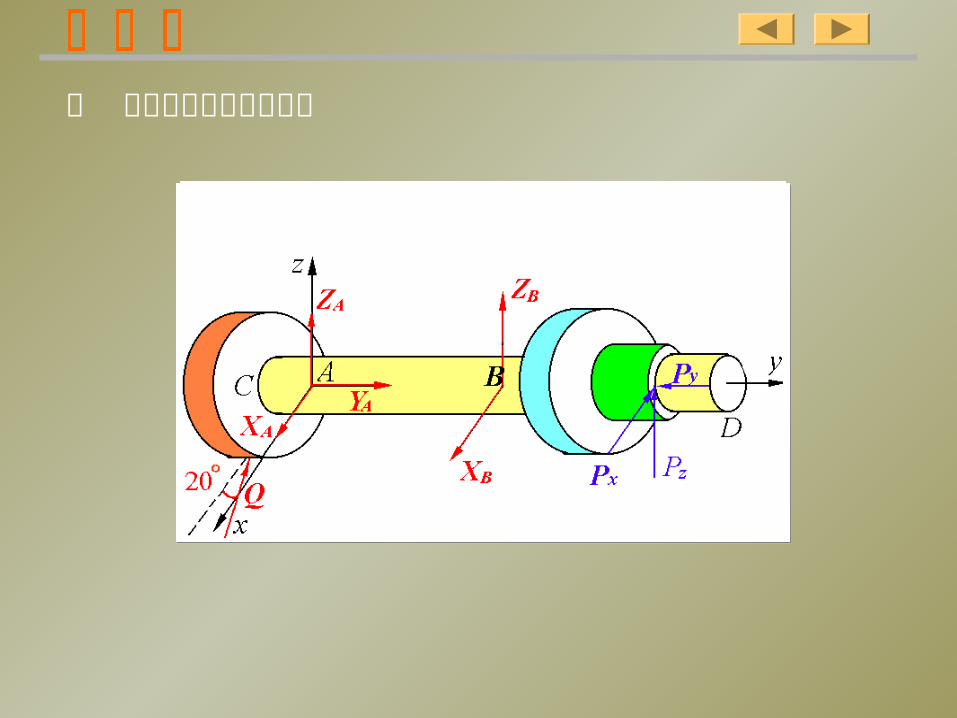
[ 例 ] 已知 : RC=100mm, RD=50mm,Px=466N, Py=352, Pz=1400
N
求:平衡时 (匀速转动 ) 力 Q=?和轴承 A , B 的约束反力? 解:①选轮轴为研究对象; ②受力分析如图; ③选 Axyz
坐标;④列方程求解。最好使每一个方程有一个未知量,以方便求解。

)N(746,020cos10050;0
)N(352,0;0
QQPm
PYPYY
zy
yAyA
由:
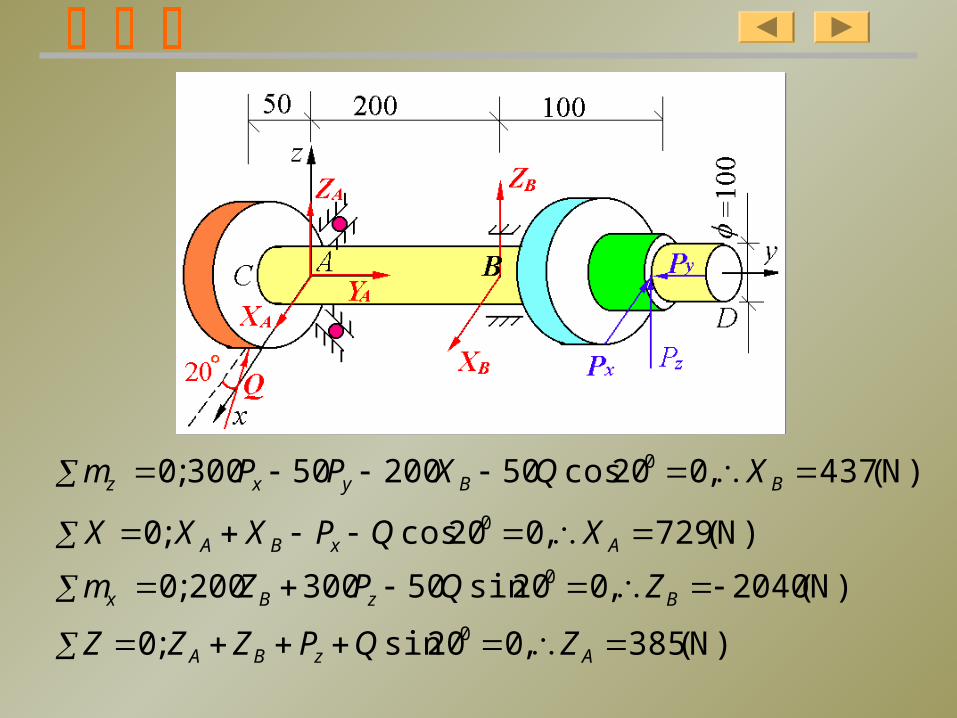
)N(385 ,020sin ;0
)N(2040 ,020sin 50300200 ;0
)N(729 ,020cos ;0
)N(437 ,020cos 5020050300 ;0
0
0
0
0
AzBA
BzBx
AxBA
BByxz
ZQPZZZ
ZQPZm
XQPXXX
XQXPPm
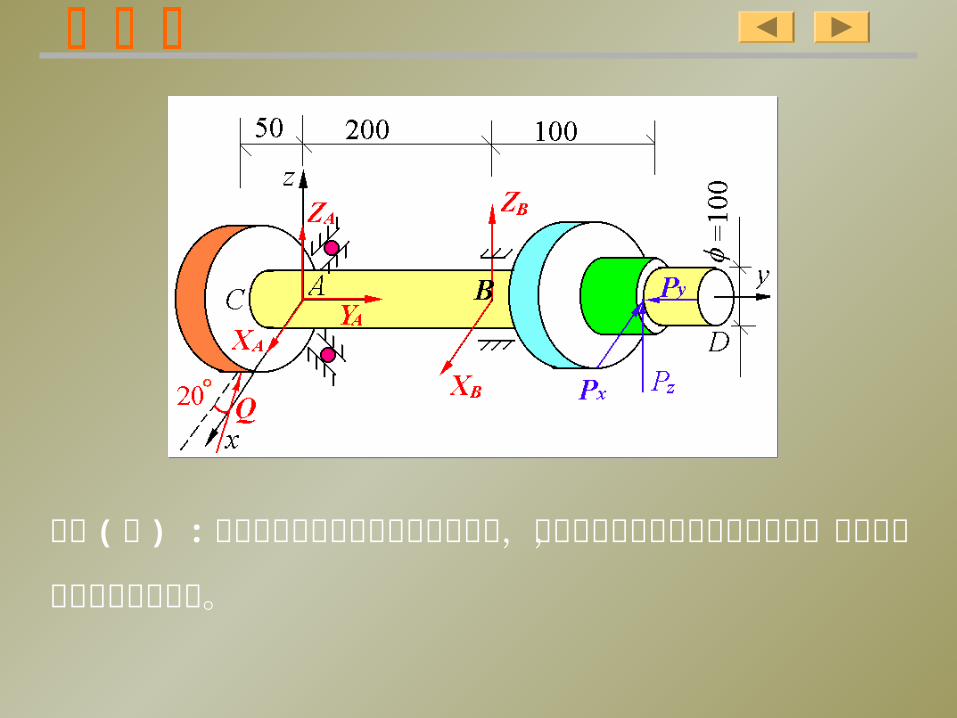
方法 ( 二 ) : 将空间力系投影到三个坐标平面内,转化为平面
力系平衡问题来求解,请同学们课后自己练习求解。
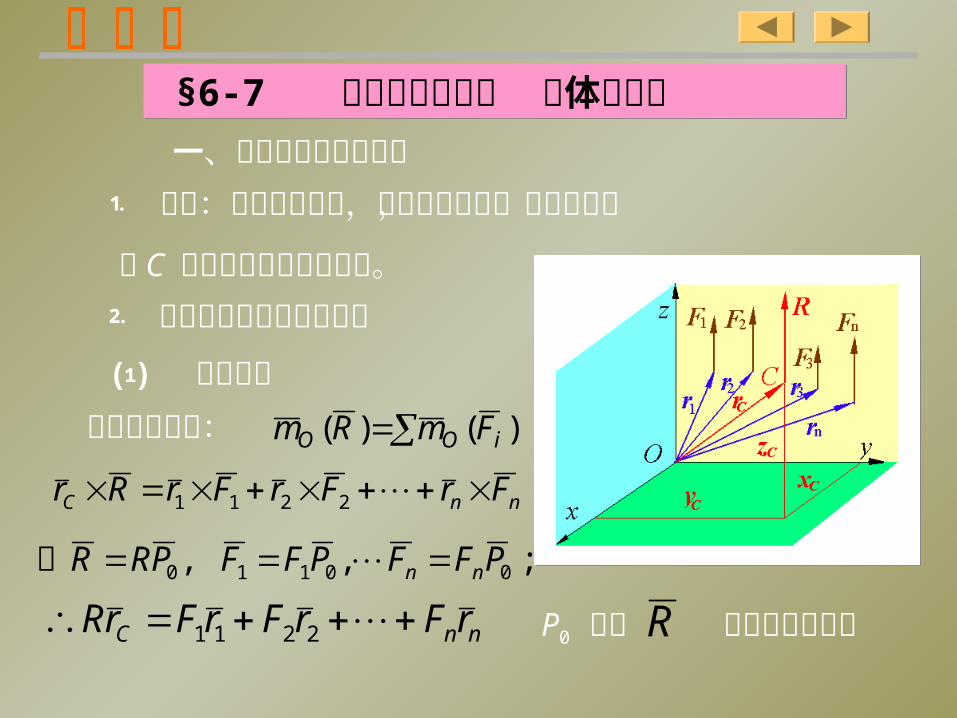
§6-7 平行力系的中心 物体的重心 §6-7 平行力系的中心 物体的重心一、空间平行力系的中心
⒉ 平行力系的中心坐标公式
由合力矩定理:⑴ 矢量形式
)()( iOO FmRm
⒈ 定义:空间平行力系,当它有合力时,合力的作用
点 C 就是此平行力系的中心。
nnC FrFrFrRr 2211
;,, 00110 PFFPFFPRR nn 令
nnC rFrFrFrR 2211 P0 为沿 方向的单位矢量R

i
iinnC F
rFR
rFrFrFr
2211
R
zFz
R
yFy
R
xFx ii
Cii
Cii
C , ,
此式称矢量形式平行力系的中心坐标公式
⑵ 直角坐标形式(投影式)
物体重心问题可以看成是空间平行力系中心的一个特例。
二、 物体的重心
⒈ 定义:组成物体各质点的重力的合力作用线所通过的一
个确定的点,这个点称为物体的重心。

⒊ 重心坐标公式 ⒉ 确定物体重心的意义⑴ 保证平衡的稳定性;⑵ 保证运动的稳定性; ⑶ 消除振动。
如果把物体的重力都看成为平行力系,则求重心问题就是求平行力系的中心问题。
iiC xPxP
P
xPx ii
C
即有:
由合力矩定理:⑴ 直角坐标形式
iiC yPyP 又∵

根据平行力系中心位置与各
平行力系的方向无关的性质,将
力线转成与 y 轴平行,再应用合
力矩定理对 x 轴取矩得:
P
yPy ii
C
有:
,iiC zPzP 得:P
zPz ii
C
综合上述得直角坐标形式重心坐标公式为:
P
zPz
P
yPy
P
xPx ii
Cii
Cii
C
,,
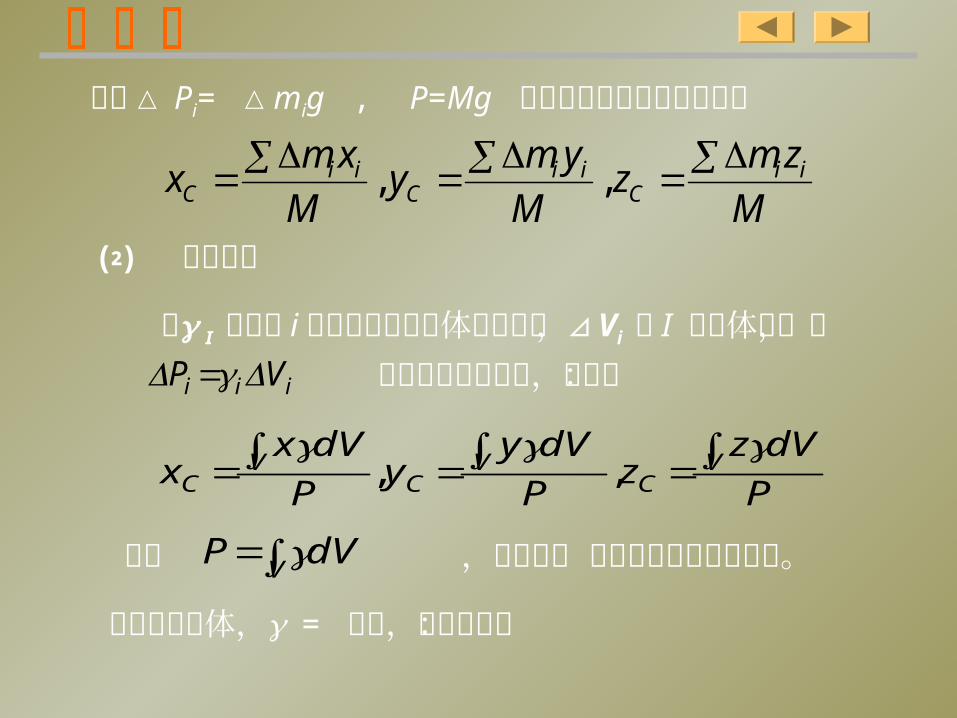
若以△ Pi= △mig , P=Mg 代入上式可得质心坐标公式
M
zmz
M
ymy
M
xmx ii
Cii
Cii
C
,,
⑵ 积分形式
设 I 表示第 i 个小部分每单位体积的重量,⊿ Vi 第 I 个
小体积,则 iii VP 代入上式并取极限,可得:
P
dVzz
P
dVyy
P
dVxx V
CV
CV
C
,,
式中 ,上式称为 积分形式重心坐标公式。V
dVP
对于均质物体, = 恒量,上式成为:

V
dVzz
V
dVyy
V
dVxx V
CV
CV
C
,,
同理对于薄曲(平)面和细曲(直)杆均可写出相应的公式。
⑶ 均质物体重心坐标公式〔形心(几何中心)坐标〕
设 表示单位体积的重量,⊿ Vi 第 i 个小体积,则 ii VP
代入直角坐标形式重心坐标公式,可得:
V
zVz
V
yVy
V
xVx ii
Cii
Cii
C
,,
① 均质立体
同理对于均质薄曲(平)面和均质细曲(直)杆均可写出相应的公式。
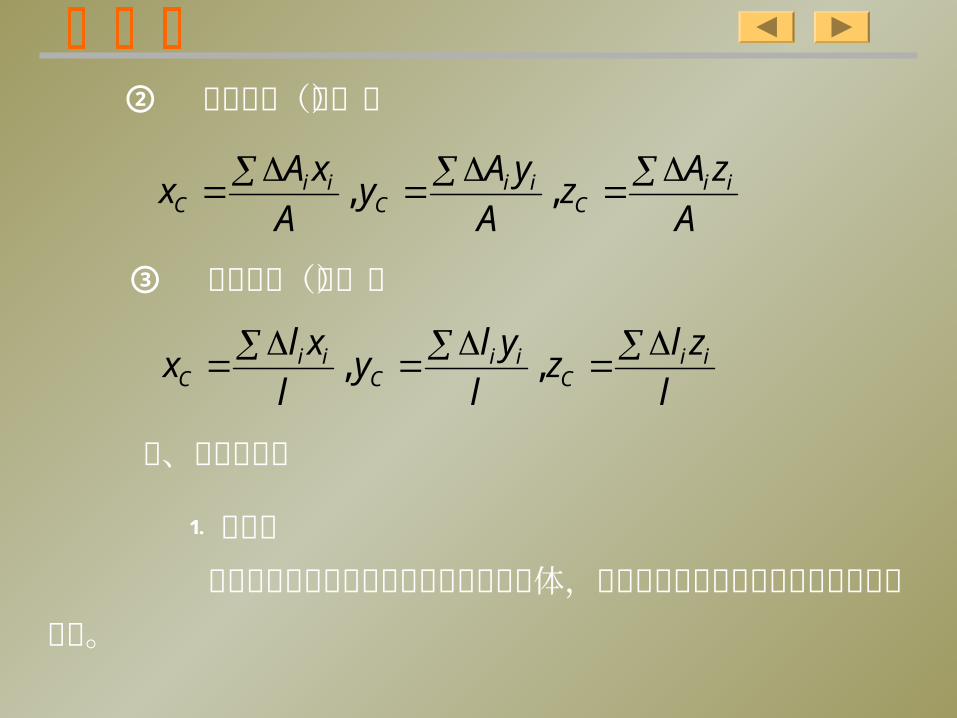
② 均质薄曲(平)面
A
zAz
A
yAy
A
xAx ii
Cii
Cii
C
,,
③ 均质细曲(直)杆
l
zlz
l
yly
l
xlx ii
Cii
Cii
C
,,
三、重心的求法
⒈ 对称法 具有对称点﹑对称轴﹑对称面的均质物体,其重心就在其对称点﹑对称轴﹑对称面上。

⒉ 组合法⑴ 分割法
[ 例 ] 已知: Z 形截面,尺寸如图。
求:该截面的重心位置。
解:将该截面分割为三部分,取 Oxy 直角坐标系,如图。
2111 cm0.3,cm5.4,cm5.1 Syx
2222 cm0.4,cm0.3,cm5.0 Syx
2333 cm0.3,cm5.0,cm5.1 Syx
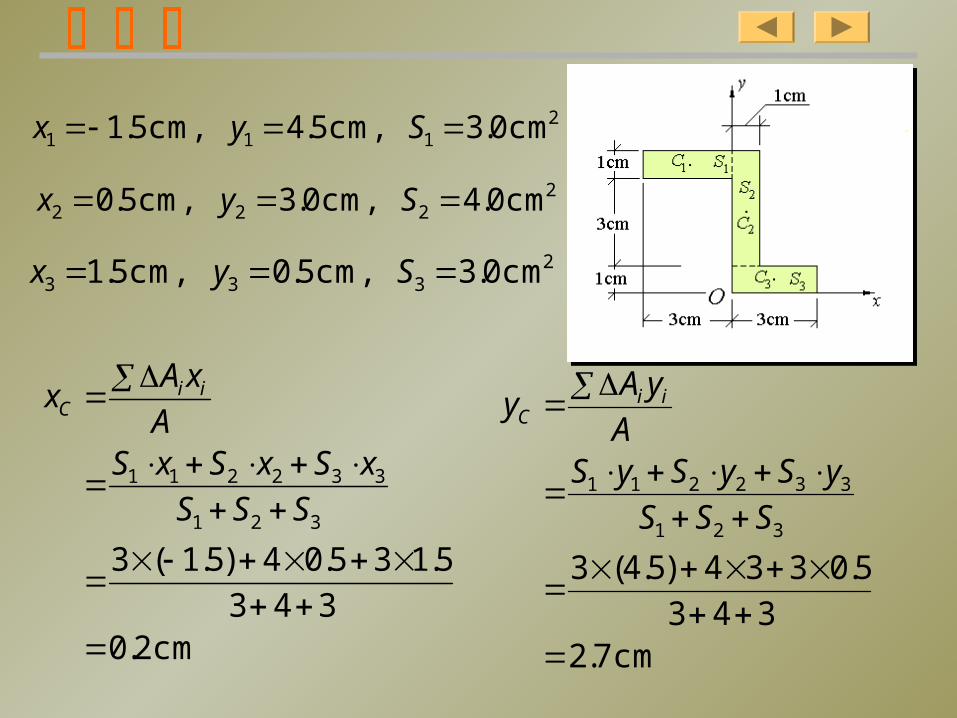
cm2.0343
5.135.04)5.1(3321
332211
SSS
xSxSxSA
xAx ii
C
cm7.2343
5.0334)5.4(3321
332211
SSS
ySySySA
yAy ii
C
2111 cm0.3,cm5.4,cm5.1 Syx
2222 cm0.4,cm0.3,cm5.0 Syx
2333 cm0.3,cm5.0,cm5.1 Syx

⑵ 负面积法
解: Z 形截面可视为由面
积为 S1 的大矩形和面积分别为
S2 及 S3 的小矩形三部分组成, S2
及 S3 是应去掉的部分,面积为
负值。2
111 cm30cm,5.2,0 Syx
2222 cm12cm,0.2cm,5.1 Syx
2333 cm8cm,0.3cm,0.2 Syx
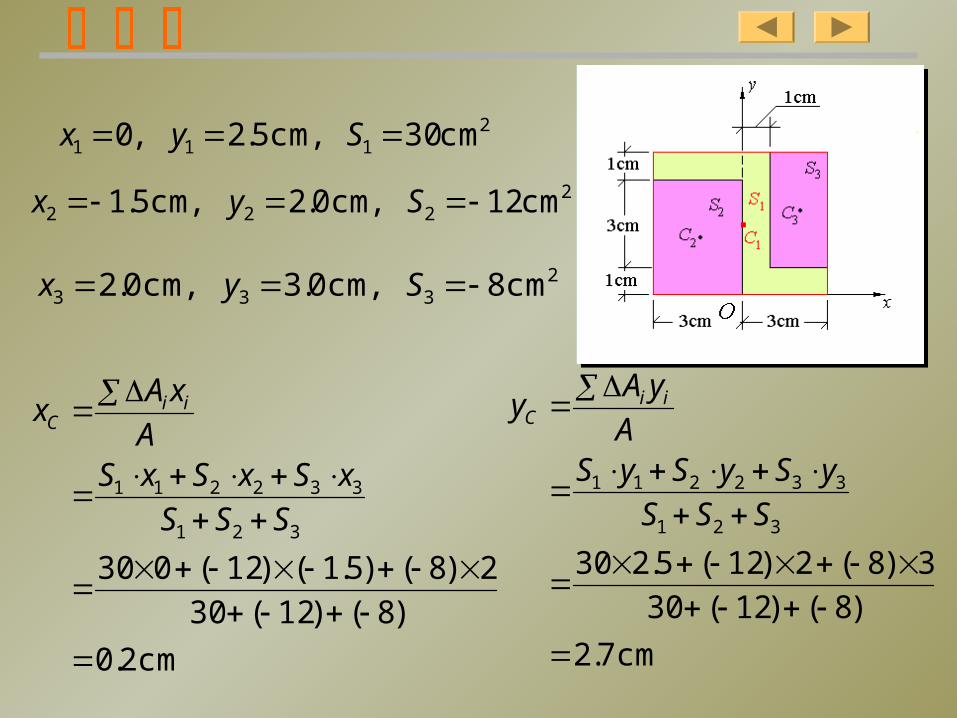
cm2.0
)8()12(30
2)8()5.1()12(030321
332211
SSS
xSxSxSA
xAx ii
C
cm7.2
)8()12(30
3)8(2)12(5.230321
332211
SSS
ySySySA
yAy ii
C
2111 cm30cm,5.2,0 Syx
2222 cm12cm,0.2cm,5.1 Syx
2333 cm8cm,0.3cm,0.2 Syx
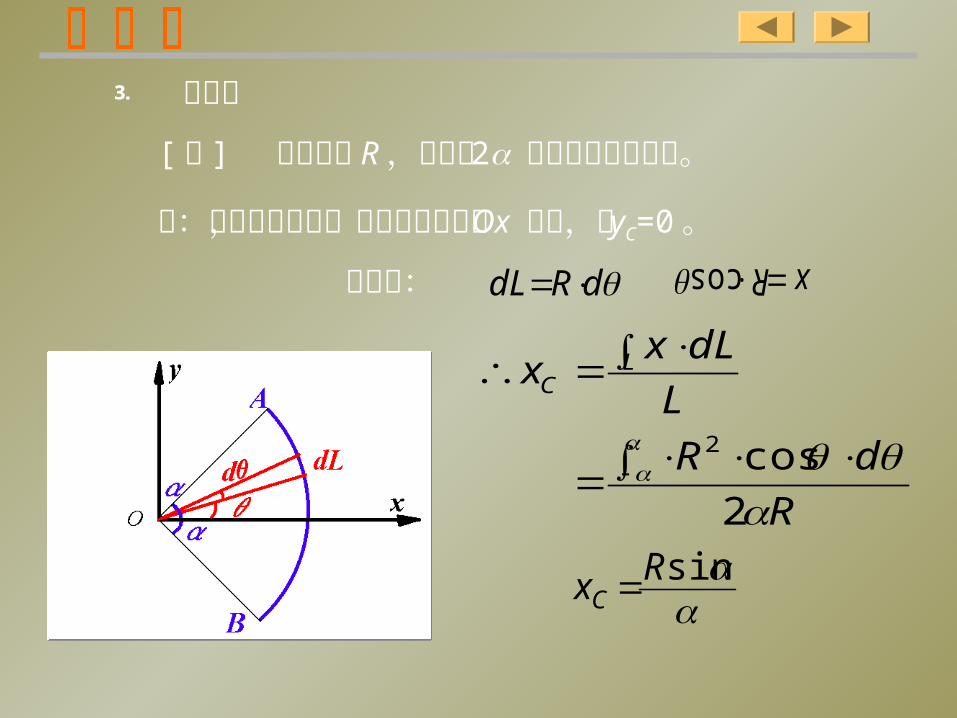
解:由于对称关系,该圆弧重心必在 Ox 轴上,即 yC=0 。
dRdL
cos R x
R
dR
L
dLxx L
C
2
cos
2
sinRxC
[ 例 ] 求半径为 R ,顶角为 2 的均质圆弧的重心。
⒊ 积分法
取微段:
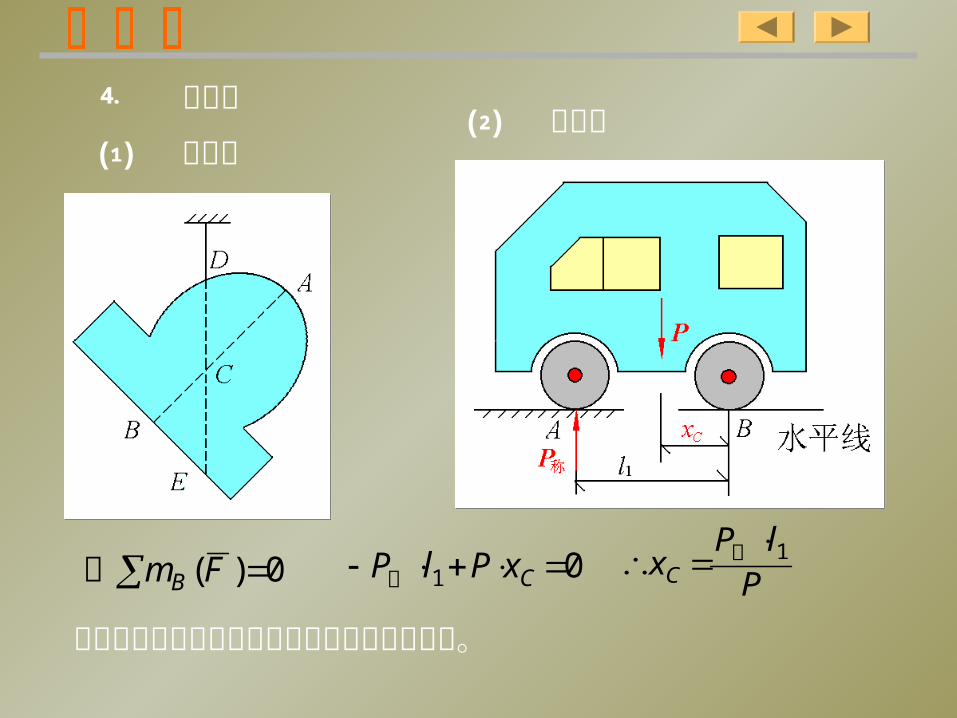
0)( FmB由 01 CxPlP称 PlP
xC1 称
简单图形的面积及重心坐标公式可由表中查出。
⑵ 称重法⒋ 实验法⑴ 悬挂法