第八章 离散系统理论
29
第第第 第第第 第第 统 第第第 第第第 第第 统 8.1 第第第 第第第第第 统 8.2 第第第第第第第第 8.3 Z 第第第 Z 第第第 8.4 第第第 第第第第第 统 8.5 第第第第第第第第 8.6 第第第 第第第第第第第 统 En d 第第第第
-
Upload
raphael-delacruz -
Category
Documents
-
view
78 -
download
3
description
第八章 离散系统理论. 8.1 离散系统的基本概念. 8.2 信号的采样与保持. 8.3 Z 变换与 Z 反变换. 8.4 离散系统的数学模型. 8.5 稳定性与稳态误差. 8.6 离散系统的动态性能分析. 本章作业. End. e *( t ). u *( t ). u h ( t ). r (t). e ( t ). c ( t ). A/D. 数字控制器. D/A. 被控对象. _. 数字计算机. 测量元件. 计算机控制系统典型原理图. 8.1 离散系统的基本概念. 8.2. 8.3. 8.4. 8.5. 8.6. - PowerPoint PPT Presentation
Transcript of 第八章 离散系统理论

第八章 离散系统理论第八章 离散系统理论 第八章 离散系统理论第八章 离散系统理论
8.1 离散系统的基本概念8.2 信号的采样与保持
8.3 Z 变换与 Z 反变换
8.4 离散系统的数学模型
8.5 稳定性与稳态误差8.6 离散系统的动态性能分析
End
本章作业
有关概念有关概念
A/D D/A数字控制器 被控对象
测量元件
e*(t)
数字计算机
r(t) e(t) u*(t) uh(t) c(t)
_
计算机控制系统典型原理图
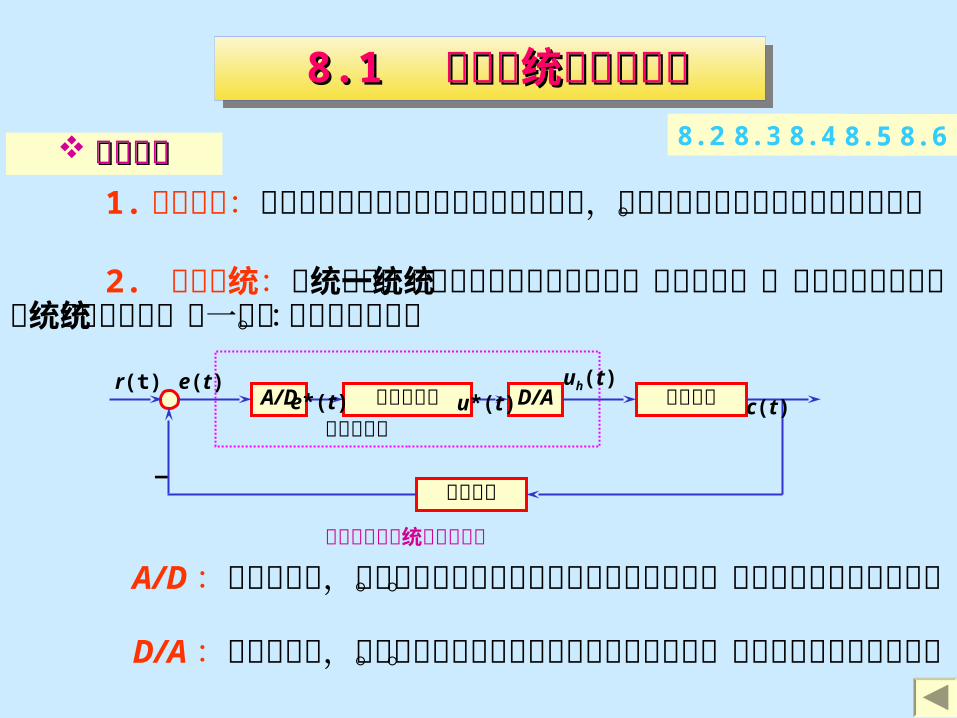
2. 离散系统:系统中有一处或多处为离散信号的系统称离散系统。典型的计算机控制系统即为离散系统的一种。其原理图如下:
A/D :模数转换器,将连续的模拟信号转换为离散的数字信号。包括采样与量化两过程。
1. 离散信号:仅定义在离散时间上的信号称离散信号,离散信号以脉冲或数码的形式呈现。
D/A :数模转换器,将离散的数字信号转换为连续的模拟信号。包括解码与复现两过程。
8.18.1 离散系统的基本概念离散系统的基本概念8.18.1 离散系统的基本概念离散系统的基本概念8.2 8.3 8.4 8.5 8.6

(a) 连 续 信号
t(b) 离散信号
t(c) 离散量化信号
t
A/D D/A数字控制器 被控对象
测量元件
e*(t)
数字计算机
r(t) e(t) u*(t) uh(t) c(t)
_
计算机控制系统典型原理图
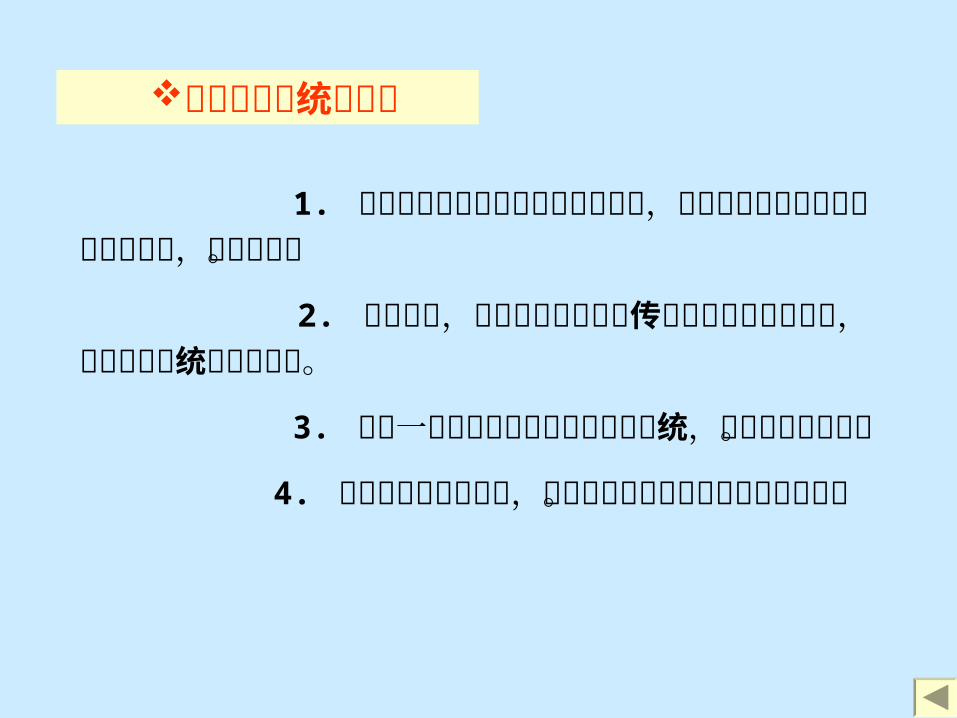
离散控制系统的特点
1. 校正装置效果比连续式校正装置好,且由软件实现的控制规律易于改变,控制灵活。
2. 采样信号,特别是数字信号的传递能有效地抑制噪声,从而提高系统抗干扰能力。
3. 可用一台计算机分时控制若干个系统,提高设备利用率。
4. 可实现复杂控制规律,且可以在运行中实时改变响应参数。

e*(t)=e(t)δT(t), 其中 为理想单位脉冲序列。则:
8.28.2 信号的采样与保持信号的采样与保持 8.28.2 信号的采样与保持信号的采样与保持
0
)()(n
T nTtt
0
* )()()(n
nTtnTete
0
** )()]([)(n
nTsenTeteLsE对上式取拉氏变换 ,得例 8.1 e(t)=eat, 试写出 e*(t) 表达式。
0
)()(n
anT nTtete 解:
物理意义:可看成是单位理想脉冲串 T (t) 被输入信号 e(t)进行调制的过程,如右图所示。 在图中, T(t) 为载波信号; e(t) 为调制信号; e*(t)为理想输出脉冲序列。
8.2.1 采样过程与采样定理
e(t)
t
e*(t)
te(t) e*(t)S
采样过程采样过程 数学描述:把连续信号变换为脉冲序列的装置称为采样器,又叫采样开关。采样过程可用下图表示。
8.1 8.3 8.4 8.5 8.68.2.2

--- 设计控制系统必须严格遵守的一条准则。 1. 问题的提出 连续信号 e(t) 经过采样后,只能给出采样点上的数值,不能知道各采样时刻之间的数值。从时域上看,采样过程损失了 e(t) 所含的信息。
采样定理采样定理
(a) 连 续 信号
t(b) 离散信号
t
2. 定性分析 如果连续信号 e(t) 变化缓慢(最大角频率 max 较低〕,而采样角频率 s 比较高(即采样周期 T=2/s 较小〕,则 e*(t) 基本上能反映 e(t) 的变化规律。
3. 采样定理(香农定理) 如果采样器的输入信号最高角频率为 ωmax ,则只有当采样频率 ωs≥2ωmax,才可能从采样信号中无失真地恢复出连续信号。
怎样才能使采样信号 e*(t) 大体上反映 e(t) 的变化规律呢?

8.2.2 信号复现及零阶保持器 信号复现 将数字信号转换复原成连续信号的过程称信号复现。该装
置称为保持器或复现滤波器。
eh(t)e*(t)
e*(t)
t 零阶保持器
eh(t)
t
零阶保持器的数学表达式为 e(nT+△t)=e(nT) ;其脉冲响应为 gh(t)=1(t)-1(t-T) ,传递函数为
s
e
s
e
stgLsG
TsTs
hh
11)]([)(
零阶保持器 零阶保持器是最简单也是工程中使用最广泛的保持器。零阶保持器的输入输出特性可用下图描述。
8.2.1

8.38.3 Z Z 变换与变换与 ZZ 反变换反变换8.38.3 Z Z 变换与变换与 ZZ 反变换反变换8.3.1 Z 变换
1. Z 变换的定义
0
** )()]([)(n
nTsenTeteLsE
2. Z 变换方法 (1) 级数求和法 将 Z 变换的定义式展开: E(z)=e(0)+e(T)z-1+ e(2T)z-2+…+ e(nT)z-n+…
(2) 部分分式法对于常用函数 Z 变换的级数形式,都可以写出其闭合形式。
① 先求出已知连续时间函数 e(t) 的拉氏变换 E (s) ;② 将 E (s)展开成部分分式之和的形式;③ 求拉氏反变换,再求 Z 变换 E(z) 。
即为 Z 变换的定义式。 称 E(z) 为 e*(t) 的 Z 变换 , 记作 Z[e*(t)]=E(z), 或 Z[e(t)]=E(z)
8.1 8.4 8.5 8.68.28.3.2性质 动画演示
0
* )()()(n
nTtnTete 由上节已知
令 z=eTs , 则 =e(0)+e(T)z-1+e(2T)z-2+…
0
)()(n
nznTezE
对比 (2) 中结果,有
11)()( 0
0
zznTezEn
n
1)|z(|11
1zz1)(1)(
12--1
0
z
z
zznTzE
n
n
1)|z(|11
1zz1)()(
12--1
0
z
z
zznTzE
n
nT
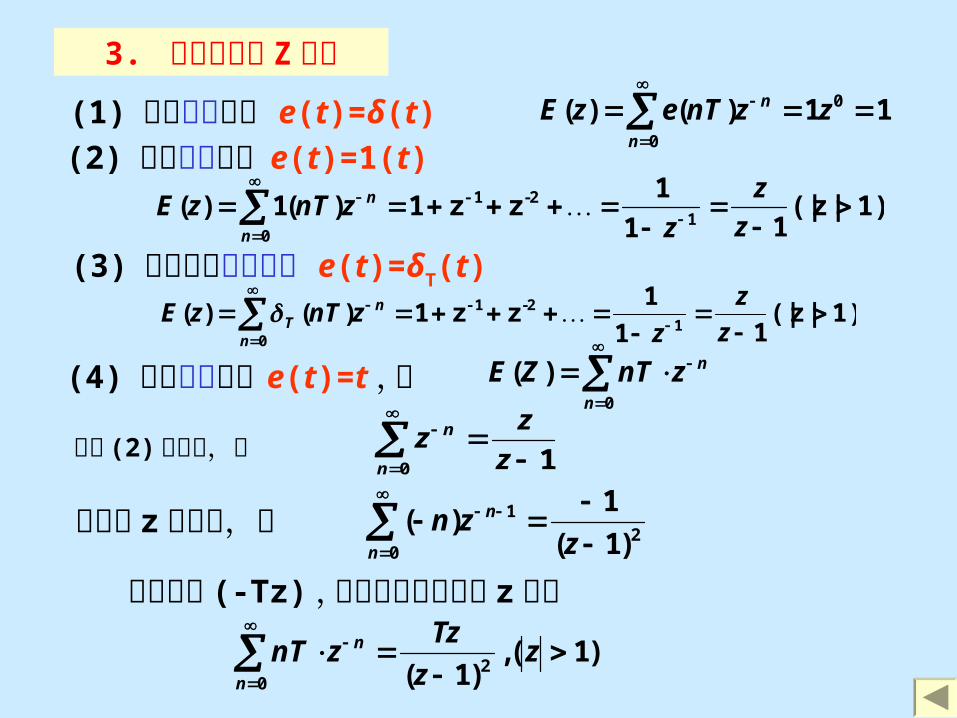
(4) 单位斜坡信号 e(t)=t ,则
0
)(n
nznTZE
3. 典型信号的 Z变换
两边同乘 (-Tz) ,得单位斜坡信号的 z 变换
两端对 z求导数,得
10
z
zz
n
n
20
1
)1(
1)(
zzn
n
n
)1(,)1( 2
0
zz
TzznT
n
n
(3) 单位理想脉冲序列 e(t)=δT(t)
(1) 单位脉冲函数 e(t)=δ(t)
(2) 单位阶跃函数 e(t)=1(t)

(5) 指数函数 e(t)=e-at(a 为实常数〕,则
(*)1
)(
33221
0
zezeze
zeZE
aTaTaT
n
nanT
这是一个公比为 (e-aTz-1) 的等比级数,当 | e-aT z-1 |<1 时,级数收敛 , 则可写成闭合形式 (**)
1
1)(
1
aTaT ez
z
zeZE
所以
利用 (*)、 (**) 式,有
(6) 正弦信号 e(t)=sin t , 因为 )(2
1sin tjtj ee
jt
])()([2
1
)(2
1)(
00
0
n
nnTj
n
nnTj
n
nnTjnTj
zezej
zeej
zE
1cos2
sin
]1)(
)([
2
1][
2
1)(
2
2
Tzz
Tz
eezz
eez
jez
z
ez
z
jzE
TjTj
TjTj
TjTj

进行部分分式展开,有
:)(,)1(
1)()7( 变换的设 zte
sssE
1
11
)1(
1)(
sssssE
再取拉氏反变换
参照 (2)和 (5), 得
tetss
Lte
)(1]1
11[)( 1
))(1(
)1(
1])(1[)(
T
T
Tt
ezz
ez
ez
z
z
zetZzE

44.. ZZ 变换的性质变换的性质 (1) 线性定理
若 E1(z)=Z[e1(t)] , E2(z)=Z[e2(t)] , a 为常数,则 Z[e1(t)+e2(t)]= E1(z)+ E2(z) , Z[ae(t)]=a E(z)
例 8.2 已知 e(t)=1(t-T), 求 Z 变换 E(z) 。
1
1
1)](1[)](1[ 11
zz
zztzzTtZ
(3) 复数位移定理 已知 e (t) 的 Z 变换为 E(z) ,则有
2)1(
)(][
aT
aTat
ez
ezTetZ根据复数位移定理,有
例 8.3 已知 e(t)=t e-at, 求 Z 变换 E(z) 。2)1(
][
z
TztZ
Z[e(t) ]=E(z e ±aT)ate
])()([1
0
k
n
nk znTezEz
(2) 实数位移定理若 E(z)=Z[e(t)] ,则 Z[e(t-kT)]=z-kE(z), Z[e(t+kT)]=
解:
解:已知单位斜坡信号的 z 变换为
8.3.28.3.1

(4) z 域微分定理若 e (t) 的 z 变换为 E(z) ,则
)]([)]([ zEdz
dTztetZ
若 e (t) 的 z 变换为 E(z) ,则 Z[ane(t)]=E(z/a) , a 为常数
例 8.4 试求 ncost 的 Z变换。
1cos2
)cos(][cos
2
Tzz
TzztZ
1cos2)(
)cos(]cos.[
2
Tzz
Tzz
tZ n
则
221
1
cos21
cos1
zTz
Tz
(5) z域尺度定理
解:由变换表

(6) 初值定理
)(lim)]([lim0
zEtezt
若 e (t) 的 z 变换为 E(z) ,函数序列 e(nT) 为有限值 (n=0,1,2,…) ,且极限 存在,则 )(lim nTe
n
)()1(lim)]([lim1
zEznTezn
设 x(nT)和 y(nT) 为两个采样函数,其离散卷积定义为x(nT)y(nT)= ,则卷积定理为:Z[x(nT)y(nT)]=X(z)Y(z)
0
])[()(k
TknykTx
)(lim zEz
若 e (t) 的 z 变换为 E(z) ,并有极限 存在,则
(7) 终值定理
(8) 卷积定理

8.3.2 Z 反变换• 从 Z 域函数 E(z)求时域函数 e*(t) ,叫做 Z 反变换。
– 记作 Z-1[E(z)]= e*(t) 。
例 8.5 已知 z 变换函数 ,试求其 z 反变换。)2)(1(
10)(
zz
zzE
解:首先将 E(z)/z展开成部分分式
2
10
1
10
)2)(1(
10)(
zzzzz
zE
210
110)(
z
z
z
zzE所以
n
z
zz
z
zz 2]
2[,1]
1[ 11
查表可得
所以 e(nT)=(-1+2n)10
e*(t)=e(0)(t)+e(T)(t-T)+e(2T)(t-2T)+… =0+10(t-T)+30(t-2T)+ 70(t-3T)+…
1. 部分分式展开法 部分分式展开法是将 E(z)展成若干分式和的形式,对每部分分式查 Z 变换表找出相应的 e*(t) 。因 Z 变换表中 Z 变换函数分子普遍有因子 Z ,所以应将 E(z)/z展开成部分分式。
性质8.3.1

aTez
z
z
zzE
1
)(所以
例 8.6 已知 z 变换函数试求其 z 反变换。 ))(1(
)1()(
aT
aT
ezz
zezE
解: 因为 aTaT
aT
ezzezz
e
z
zE
1
1
1
))(1(
1)(
所以 e*(t)=e(0)(t)+e(T)(t-T)+e(2T)(t-2T)+… =0+(1-e-aT)(t-T)+(1-e-2aT)(t-2T)+(1-e-3aT)(t-3T)+…
2. 幂级数法(综合除法 )
2--1
0
e(2T)ze(T)ze(0))()(n
nznTezE
2-
2-1
1022
11
22
110 zczcc)(
1)( nm
zazaza
zbzbzbbzE
nn
mm
0
* )()(n
n nTtcte
查表得 e(t)=1(t)-e-at 则 e(nT)=1-e-anT
由 Z 变换的定义
而
则 c0,c1,c2,…就是脉冲序列 e*(t) 各采样点的值 e(nT) , 所以

8.4 8.4 离散系统的数学模型离散系统的数学模型 8.4 8.4 离散系统的数学模型离散系统的数学模型 8.4.1 线性常系数差分方程及其解法
)()1()(
)()2()1()(
10
21
mkrbkrbkrb
nkcakcakcakc
m
n
工程中常用迭代法和 Z 变换法来求解差分方程:1. 迭代法
根据给定差分方程和输出序列的初值,则可以利用递推关系,一步一步算出输出序列。
2.Z变换法 用 Z 变换法解差分方程的实质,是对差分方程两端取 Z 变换,并利用 Z 变换的位移性质,得到以 z 为变量的代数方程,然后对代数方程的解 C(z) 取 Z 反变换即求得输出序列。
式中: k— 第 k 个采样时刻; n— 系统的阶次。
一般 n阶线性定常离散系统的输出和输入之间的关系,可用n阶常系数差分方程描述。
8.1 8.3 8.5 8.68.2

8.4.2 脉冲传递函数 脉冲传递函数的定义和意义 零初始条件下,系统输出 C(t) 的 z 变换 C(z) 与输入 r(t) 的 z
变换 R(z) 之比,称为脉冲传递函数,即 G(z)=C(z)/R(z) 。 若输入 r(t)=δ(t), 则 C(z)=G(z)R(z)=G(z), g*(t)=Z-1[G(z)] 。即
连续系统的脉冲响应采样后的 Z 变换即为脉冲传递函数。
)()()(),()()() 21 zDzGzCzRzGzDa
)(
)()(),()()()( 21 zR
zCzGzRzGzGzC
)()()() 21 sGsGsGb
)()]()([)( 2121 zGGsGsGZzG 记为
中:和在 )) ba
开环脉冲传递函数1. 串联环节
)()()( 2121 zGzGzGG

2. 有零阶保持器的情况
)(])(
[)(1 zRs
sGZzC p
)()( 11
2 zCzzC
)(])(
[)1()()()( 121 zR
s
sGZzzCzCzC p
])(
[)1()(
)()( 1
s
sGZz
zR
zCzG p
)()()( 1 sRsGsE )()( 1 zRGzE
)()()( 2 zEzGzC
)()()( 12 zRGzGzC
3. 连续信号进入连续环节

-
-
闭环脉冲传递函数)()()()1 sBsRsE )()()()( * sEsHsGsR
)()]()([)()( **** sEsHsGsRsE
)()()()( zEzGHzRzE
)(1
)()(
zGH
zRzE
)(1
)()()()()(
zGH
zRzGzEzGzC
)(1
)()(,
)(1
1)(
zGH
zGz
zGHze
)()()()()()2 21 zEzHGzGzRzE
)()(1
)()()()()()()(
21
2121 zHGzG
zRzGzGzEzGzGzC
)()()()()()()3 * sCsHsGsRsGsC )()()()( zCzGHzGRzC
)(1
)()(
zGH
zGRzC
)()(1
)()()(,
)()(1
1)(
21
21
21 zHGzG
zGzGz
zHGzGze
动画演示

S 域的虚轴映射成 Z 域的圆周;左半 S 平面映射在圆周内,右半S 平面映射在圆周外。
8.58.5 离散系统的稳定性与稳态误差离散系统的稳定性与稳态误差8.58.5 离散系统的稳定性与稳态误差离散系统的稳定性与稳态误差
一、 S域到 Z域的映射
二、离散系统稳定的充要条件1. 时域中:特征方程的根满足│ ai│<1 ( 了解即可〕2. Z 域中:特征方程 1+HG(z)=0 的模│ zi│<1 ( 牢固掌握 )
三、离散系统的稳定性判据双线性变换与劳氏判据:1. 双线性变换
,1
1
w
wz
1
1
z
zw
2. 劳氏判据 : 形式同连续系统。
8.1 8.3 8.4 8.68.28.5.2例8.5.1 稳定性判据 动画演示
动画
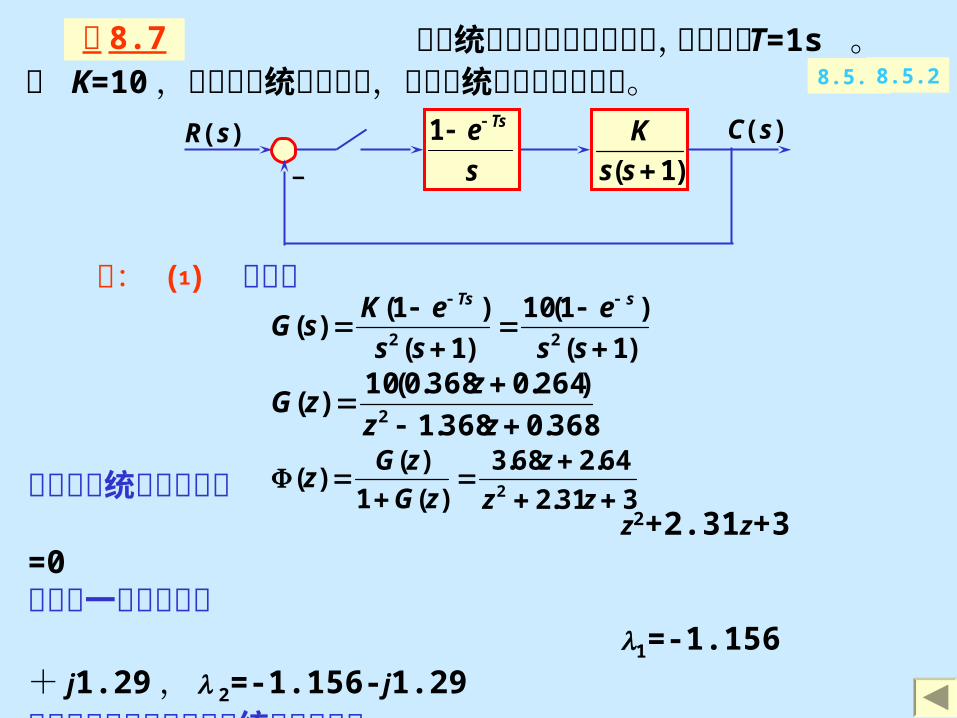
设系统的结构图如下图所示,采样周期 T=1s 。设 K=10 ,试分析系统的稳定性,并求系统的临界放大系数。
例 8.7
解: ⑴ 由图得
)1(
)1(10
)1(
)1()(
22
ss
e
ss
eKsG
sTs
368.0368.1
)264.0368.0(10)(
2
zz
zzG
331.2
64.268.3
)(1
)()(
2
zz
z
zG
zGz
由此得系统特征方程为 z2+2.31z+3=0求解得一对共轭复根 1=-1.156+ j1.29 , 2=-1.156-j1.29分布在单位圆外,因此系统是不稳定的。
)1( ss
K C(s)R(s) s
e Ts1
——
8.5.1 8.5.2

由 1 + G(z)=0 求得系统特征方程为 z2-(1.368-0.368K)z+(0.368+0.264K) =0
⑵ 由系统开环脉冲传递函数
368.0368.1
)264.0368.0()(
2
zz
zKzG
0104.0736.2
0528.0264.1
0632.0
K
K
K
得到系统的临界放大系数为 : Kc=2.4
列劳氏表计算 w2 2.736-0.104K 0.632K w1 1.264-0.528K 0 w0 0.632K
为使系统稳定,须有
进行 w 变换得 (2.736-0.104K)w2+(1.264-0.528K)w+0.632K=0
动画演示

1. 终值定理法
8.5.2 稳态误差的计算
)](1[
)()1(lim)()1(lim)(lim)(
1
1
1
*
zGz
zRzzEztee
zzt
2. 误差系数法 (1) 单位阶跃输入时 r(t)=1(t)
)](1[lim1
zGKz
p
(2) 单位斜坡输入时 r(t)=t
1)(
z
zzR
2)1()(
z
TzzR
)()1(lim1
1zGz
TK
zv
(3) 单位加速度输入时 r(t)=t2/2
3
2
)1(2
)1()(
z
zzTzR
)()1(lim1 2
12zGz
TK
za
8.5.1 例 动画演示

设系统的结构图如下图所示, K=1, T=0.1s ,r(t)=1(t)+t, 求系统的稳态误差。
例 8.8
系统的稳态误差为
解:系统的开环传递函数为
))(1(
)1(
)1()1(
)1(
1)1()(
21
21
T
T
ezz
ze
z
Tzz
ssZzzG
把 T=0.1 代入化简得 )905.0)(1(
)9.0(005.0)(
zz
zzG
)905.0)(1(
)9.0(005.01lim)](1[lim
11 zz
zzGK
zzp
1)905.0)(1(
)9.0(005.0)1(lim
1.0
1)()1(lim
111
zz
zzzGz
TK
zzv
111
)( vp KK
e
)1( ss
K C(s)R(s) s
e Ts1
——

一般假定外作用为单位阶跃函数 r(t)=1(t) ,此时 R(z)=z/(z-1) ,则系统输出量的 Z 变换函数为
8.68.6 离散系统的动态性能分析离散系统的动态性能分析8.68.6 离散系统的动态性能分析离散系统的动态性能分析
一、时间响应
)(1
)( zz
zzC
然后用长除法,将 C(z) 展成无穷幂级数: C(z)=C0+C1z-1+ C2z-2+…+ Cnz-n
在 C*(t)—t 坐标中描出点 (kT, Ck ), k=0,1,2,…n ,则得阶跃响应脉冲序列。
则得单位阶跃作用下的输出序列为 C(kT)=Ck , k=0,1,2,…n
将各点用虚线平滑连接,以便分析性能指标。
8.1 8.3 8.4 8.58.2

闭环复极点与动态响应的关系
二、闭环极点与动态响应的关系

闭环实极点与动态响应的关系

本 章 作 业本 章 作 业本 章 作 业本 章 作 业
( P436)
• 8-1(1)• 8-2(3, 6)• 8-4• 8-9(1)• 8-10