Исправление стерео видео
89
Исправление стерео видео Вячеслав Нападовский Video Group CS MSU Graphics & Media Lab
-
Upload
msu-gml-videogroup -
Category
Education
-
view
106 -
download
1
Transcript of Исправление стерео видео
Исправление стерео видео
Вячеслав Нападовский
Video Group CS MSU Graphics & Media Lab
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Временная синхронизация
Заключение
2

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
3
Цветокоррекция Пример проблемного видео
левый ракурс правый ракурс
Feng Shao et al., “Color correction for multi-view video based on background segmentation and dominant color extraction”, WSEAS Transactions on Computers, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Цветокоррекция Актуальность
Причины:
Различия в матрицах камер
Разное положение камер относительно источника света
Проблемы, возникающие в стерео видео:
Глобальное несоответствие цветов между ракурсами
Наличие/отсутствие бликов на объектах на разных ракурсах
4
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Исправление геометрии
Причины:
Сложность корректной установки камер
Сложность грамотной настройки камер
Трудность сохранения их фиксированного положения
5
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
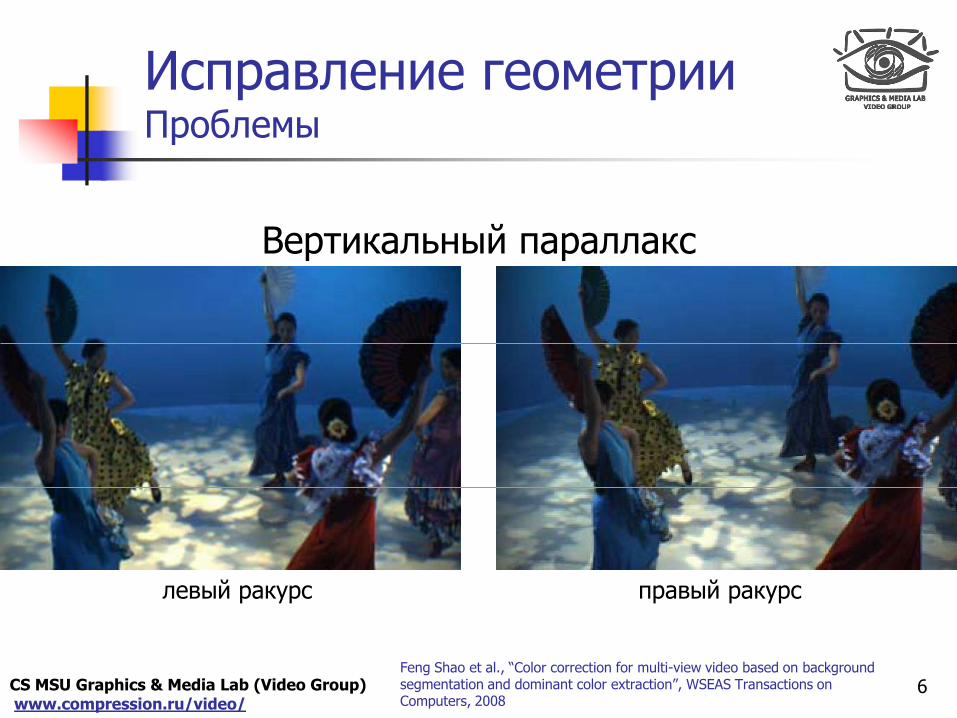
Исправление геометрии Проблемы
6
левый ракурс правый ракурс
Вертикальный параллакс
Feng Shao et al., “Color correction for multi-view video based on background segmentation and dominant color extraction”, WSEAS Transactions on Computers, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
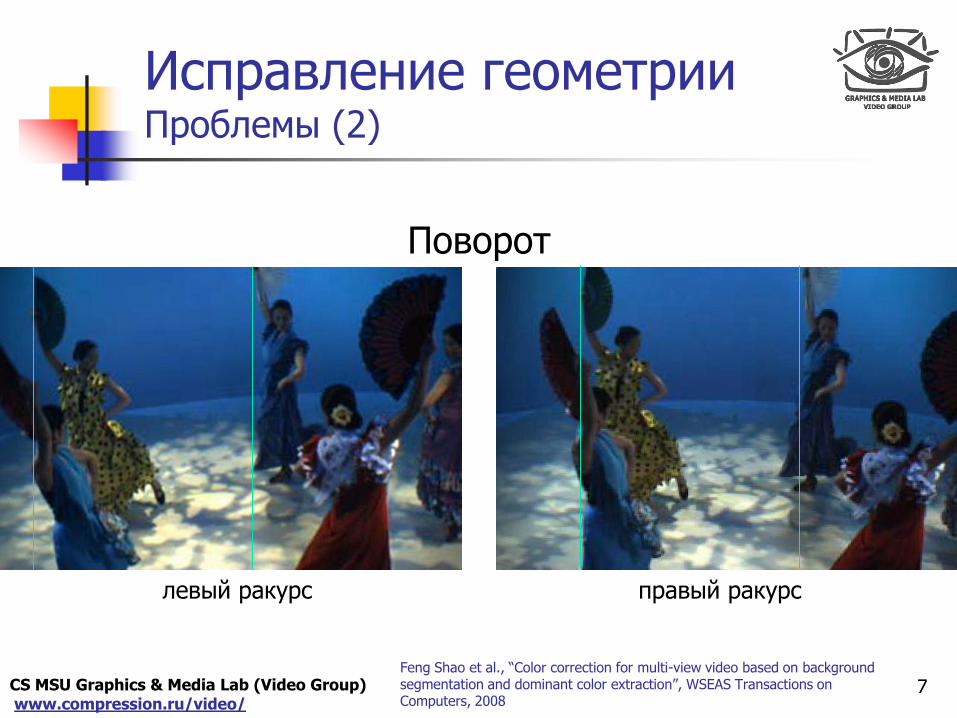
Исправление геометрии Проблемы (2)
7
левый ракурс правый ракурс
Поворот
Feng Shao et al., “Color correction for multi-view video based on background segmentation and dominant color extraction”, WSEAS Transactions on Computers, 2008

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Исправление геометрии Проблемы (3)
8
левый ракурс правый ракурс
Искажение вертикальной перспективы
Feng Shao et al., “Color correction for multi-view video based on background segmentation and dominant color extraction”, WSEAS Transactions on Computers, 2008

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Временная синхронизация
9
Синхронизированные ракурсы Несинхронизированные ракурсы
Daniel Wedge, “Video Sequence Synchronization”, The University of Western Australia, 2007
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Временная синхронизация Актуальность
Запустить две камеры одновременно довольно сложно
В процессе записи камеры могут пропускать кадры
Потери данных при передаче
10
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Постановка задачи
Цветокоррекция с использованием размытого изображения
Hybrid color correction
Исправление геометрии
Временная синхронизация
Заключение
11
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Цветокоррекция
Постановка задачи:
Найти преобразование, приводящее один ракурс к другому, чтобы объекты в соответствующих ракурсах имели один и тот же цвет
Найти среднее преобразование для двух ракурсов
12

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
13
Цветокоррекция
reference image input image
результат применения одного преобразования по всем пикселям
результат с учётом пространственной принадлежности пикселей
Feng Shao et al., “Color correction for multi-view video based on background segmentation and dominant color extraction”, WSEAS Transac. on Comp. 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Постановка задачи
Цветокоррекция с использованием размытого изображения
Hybrid color correction
Исправление геометрии
Временная синхронизация
Заключение
14
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Gaussian Blur Алгоритм
1. Поиск пар feature points с помощью SIFT (Scale-Invariant Feature Transform)
2. Гауссово размытие левого и правого изображений
3. Выделение цветов feature points на размытых и неразмытых изображениях
4. Построение и применение функции преобразования цветов
15 Kenji Yamamoto, Ryutaro Oi, “Color Correction for Multi-view Video Using Energy Minimization of View Networks”, IJAC, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
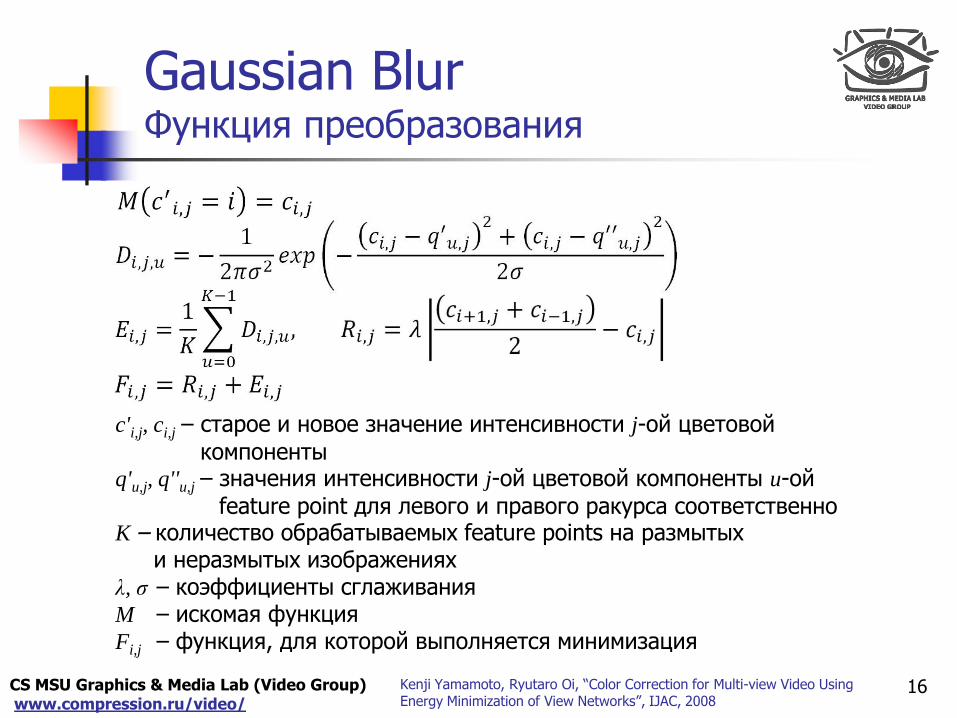
Gaussian Blur Функция преобразования
16
c'i,j, ci,j – старое и новое значение интенсивности j-ой цветовой
компоненты q'u,j, q''u,j – значения интенсивности j-ой цветовой компоненты u-ой
feature point для левого и правого ракурса соответственно K – количество обрабатываемых feature points на размытых
и неразмытых изображениях
λ, σ – коэффициенты сглаживания M – искомая функция Fi,j – функция, для которой выполняется минимизация
Kenji Yamamoto, Ryutaro Oi, “Color Correction for Multi-view Video Using Energy Minimization of View Networks”, IJAC, 2008

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Gaussian Blur Результат
17
reference image input image
Входные данные
Kenji Yamamoto, Ryutaro Oi, “Color Correction for Multi-view Video Using Energy Minimization of View Networks”, IJAC, 2008

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Gaussian Blur Результат
18
reference image output image
Выходные данные
Kenji Yamamoto, Ryutaro Oi, “Color Correction for Multi-view Video Using Energy Minimization of View Networks”, IJAC, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Выводы
Достоинства:
Исправление цвета на зашумлённых изображениях
Возможность эффективной параллельной реализации
Недостаток:
Не учитывается разная освещенность отдельных объектов
19 Kenji Yamamoto, Ryutaro Oi, “Color Correction for Multi-view Video Using
Energy Minimization of View Networks”, IJAC, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Постановка задачи
Цветокоррекция с использованием размытого изображения
Hybrid color correction
Исправление геометрии
Временная синхронизация
Заключение
20
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Алгоритм
1. Поиск, сопоставление и отслеживание feature points у двух ракурсов Scale-Invariant Feature Transform (David Lowe, 1999)
Pyramid Optical Flow (Jean-Yves Bouguet, 2002)
2. Оценка преобразования 1. Histogram matching
2. Локальная цветокоррекция
3. Применение итогового преобразования к входному изображению
21 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color
matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Histogram matching
22
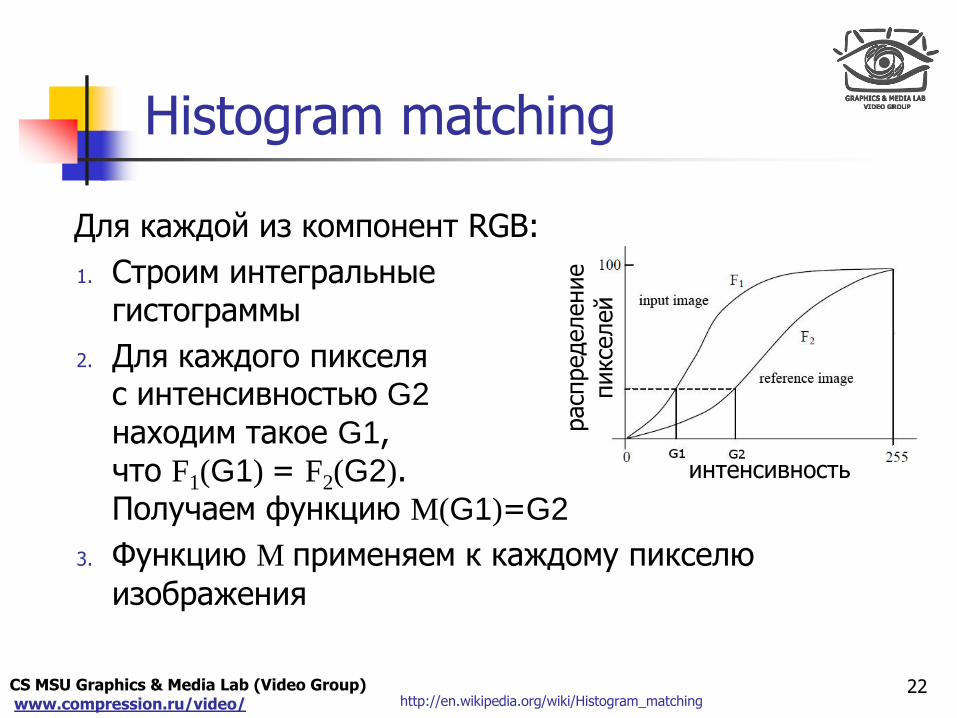
Для каждой из компонент RGB:
1. Строим интегральные гистограммы
2. Для каждого пикселя c интенсивностью G2 находим такое G1, что F1(G1) = F2(G2). Получаем функцию M(G1)=G2
3. Функцию M применяем к каждому пикселю
изображения
http://en.wikipedia.org/wiki/Histogram_matching
интенсивность
расп
ределение
пиксе
лей
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Histogram matching (2)
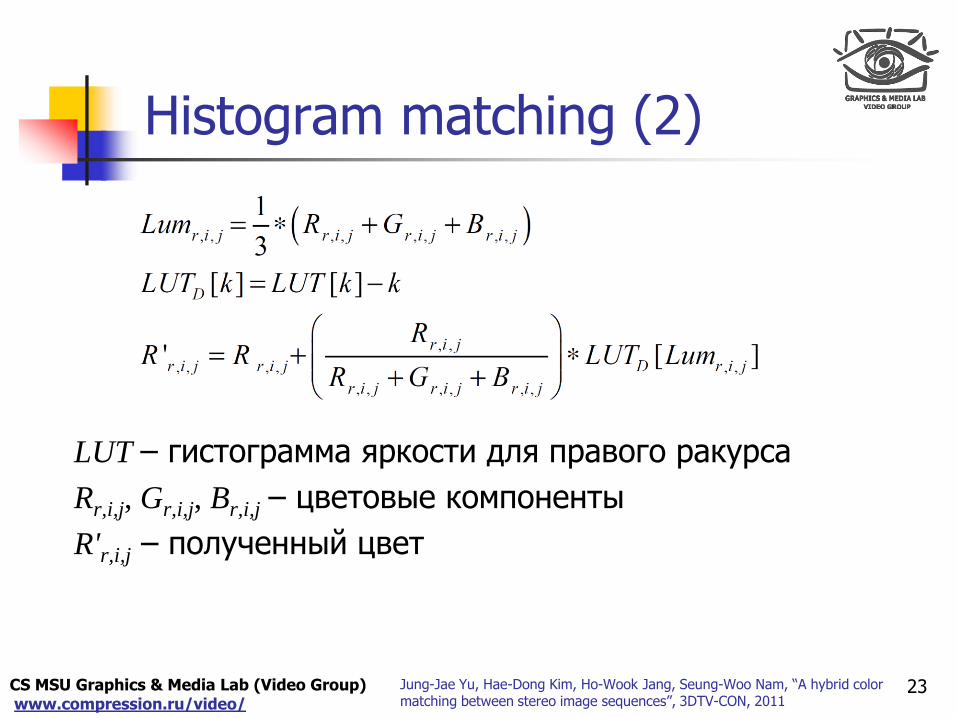
LUT – гистограмма яркости для правого ракурса
Rr,i,j, Gr,i,j, Br,i,j – цветовые компоненты
R'r,i,j – полученный цвет
23 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Hybrid color correction Обработка feature points
24
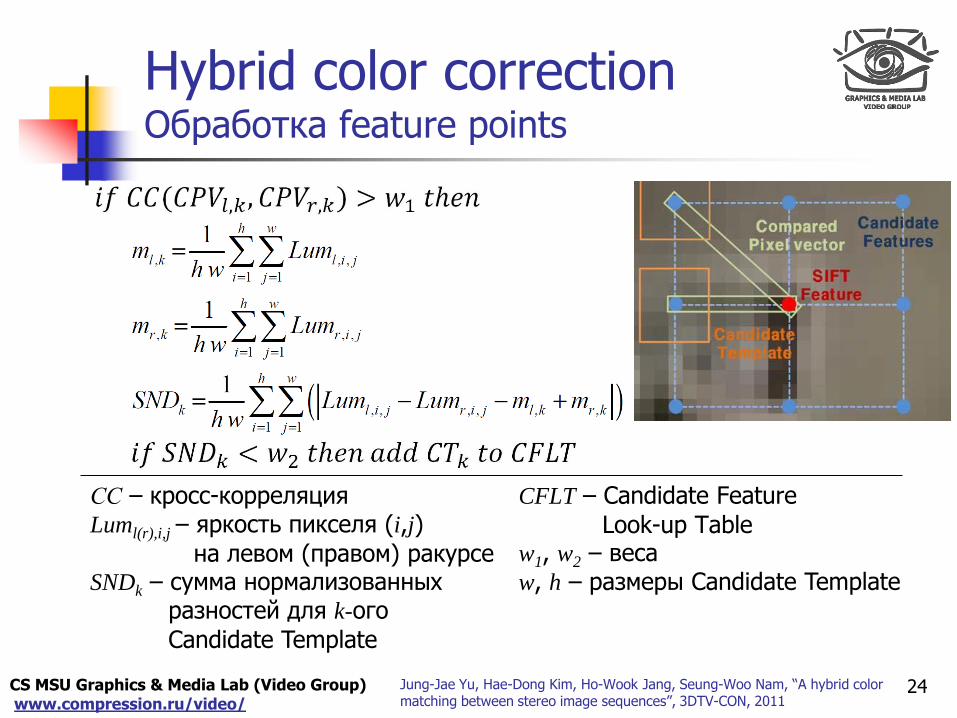
СС – кросс-корреляция Luml(r),i,j – яркость пикселя (i,j)
на левом (правом) ракурсе SNDk – сумма нормализованных
разностей для k-ого
Candidate Template
CFLT – Candidate Feature
Look-up Table w1, w2 – веса w, h – размеры Candidate Template
Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Hybrid color correction Веса для локальных окрестностей
25
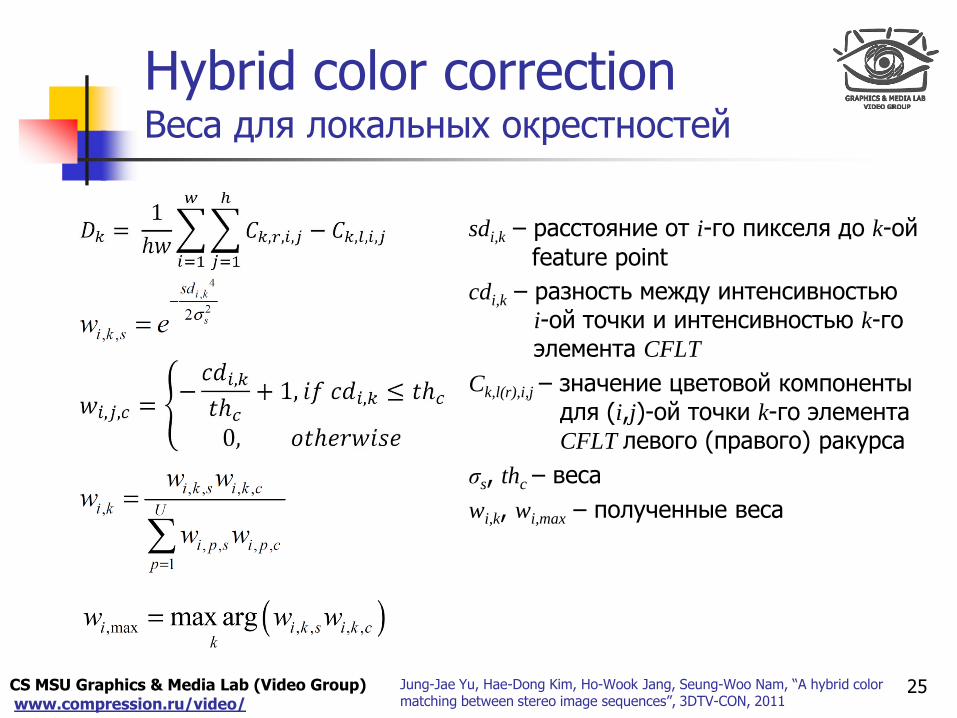
sdi,k – расстояние от i-го пикселя до k-ой
feature point
cdi,k – разность между интенсивностью i-ой точки и интенсивностью k-го элемента CFLT
Ck,l(r),i,j – значение цветовой компоненты для (i,j)-ой точки k-го элемента CFLT левого (правого) ракурса
σs, thc – веса
wi,k, wi,max – полученные веса
Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
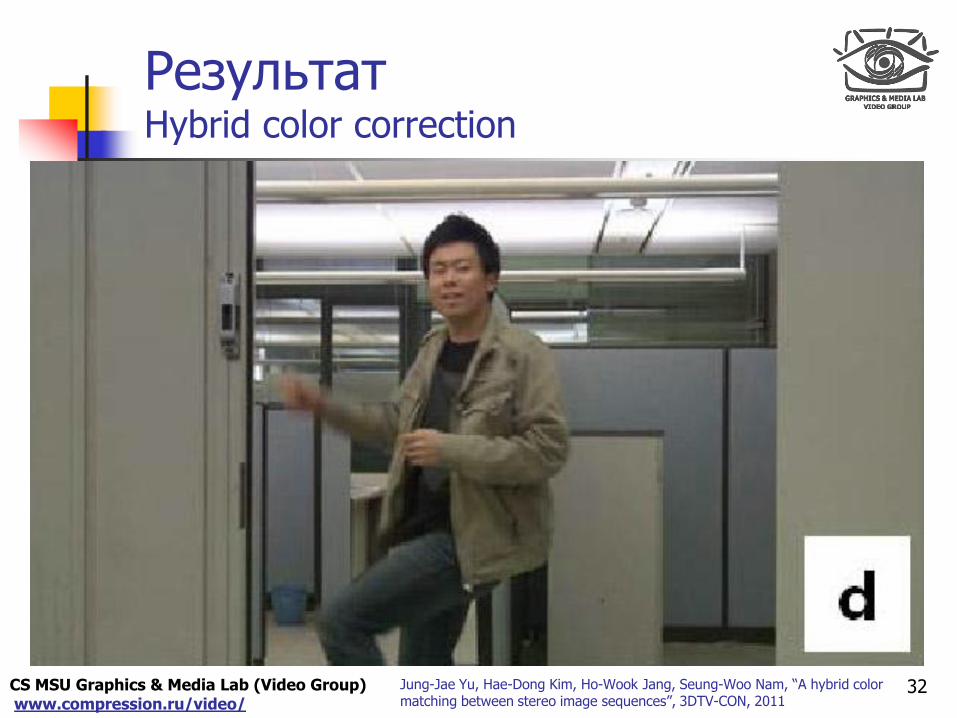
Изменение input image
Сi – цвет i-го пикселя
CLocal,i – цвет, изменённый с помощью локальной коррекции
CGlobal,i – цвет, изменённый с помощью histogram matching
CHybrid,i – результирующий цвет
a – весовой коэффициент
26 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
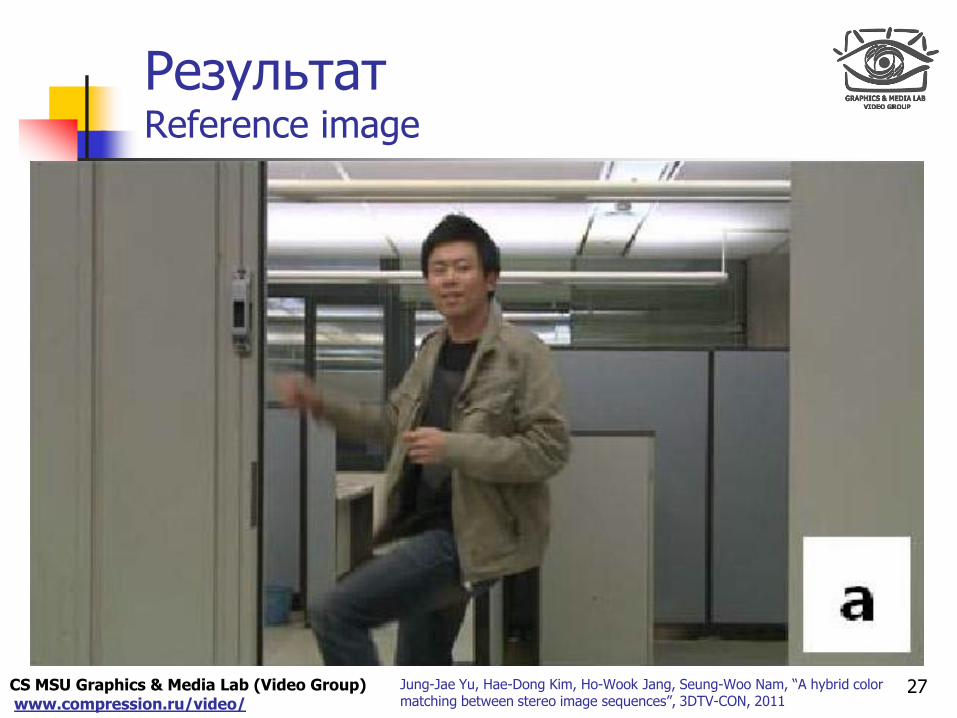
Результат Reference image
27 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
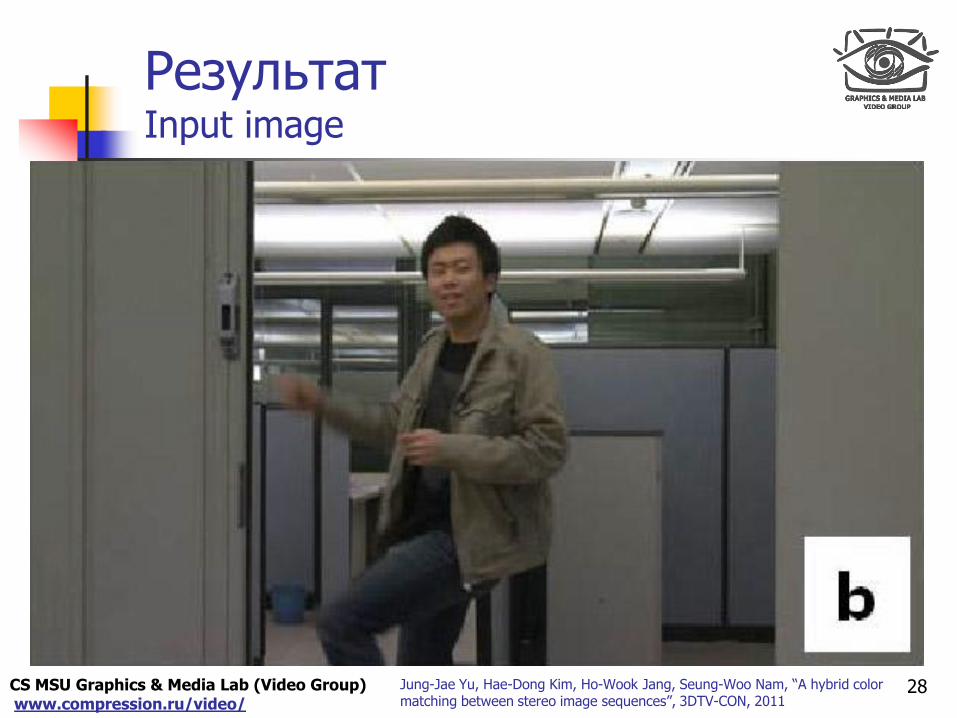
Результат Input image
28 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
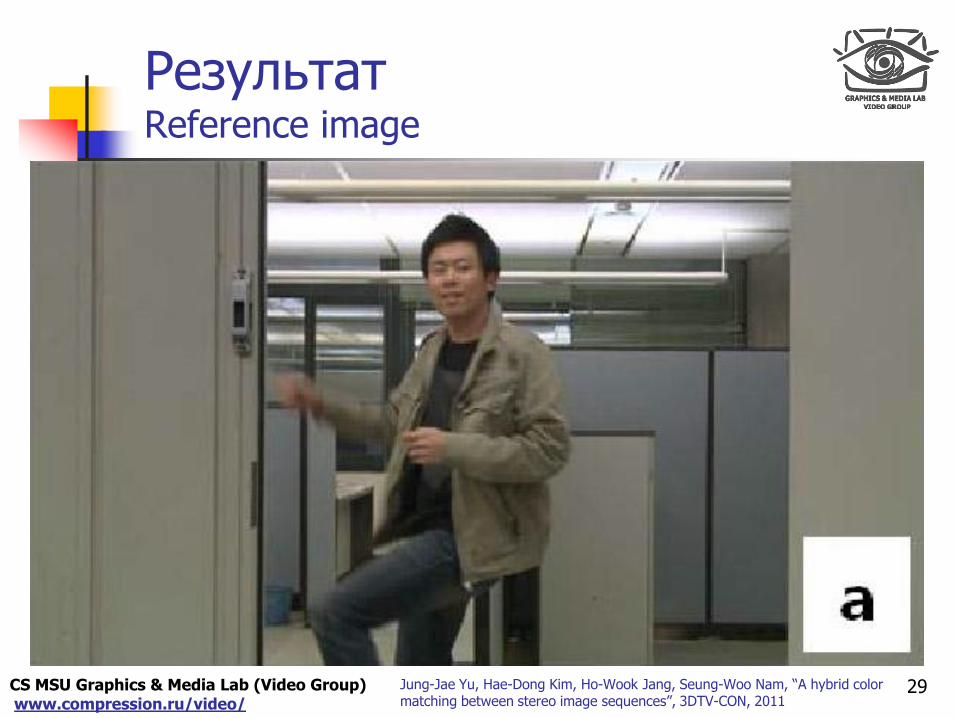
Результат Reference image
29 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Результат Histogram matching
30 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
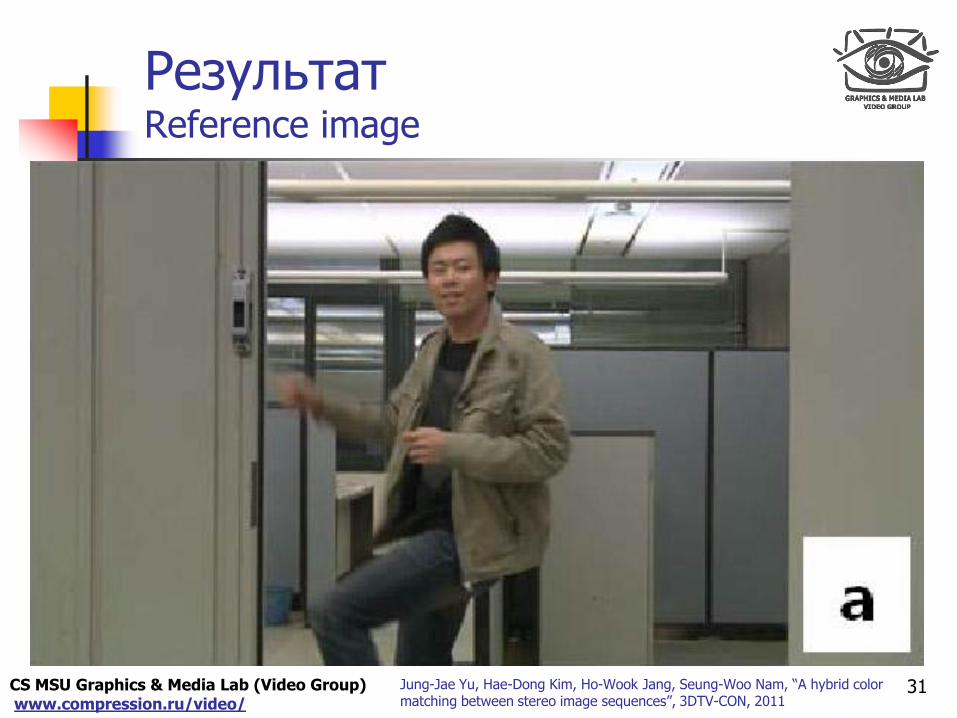
Результат Reference image
31 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Результат Hybrid color correction
32 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Выводы
Достоинства:
Учёт освещённости разных объектов
Стабильность к зашумлённым feature points
Недостаток:
Большое время выполнения за счёт использования Optical Flow
33 Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV-CON, 2011
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Основные понятия
Постановка задачи
Ректификация
Perception optimization
Временная синхронизация
Заключение 34
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Однородные координаты ― координаты, обладающие свойством, что определяемый ими объект не меняется при умножении всех координат на одно и то же ненулевое число
Перевод однородных координат в евклидовы:
35
Основные понятия
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
36
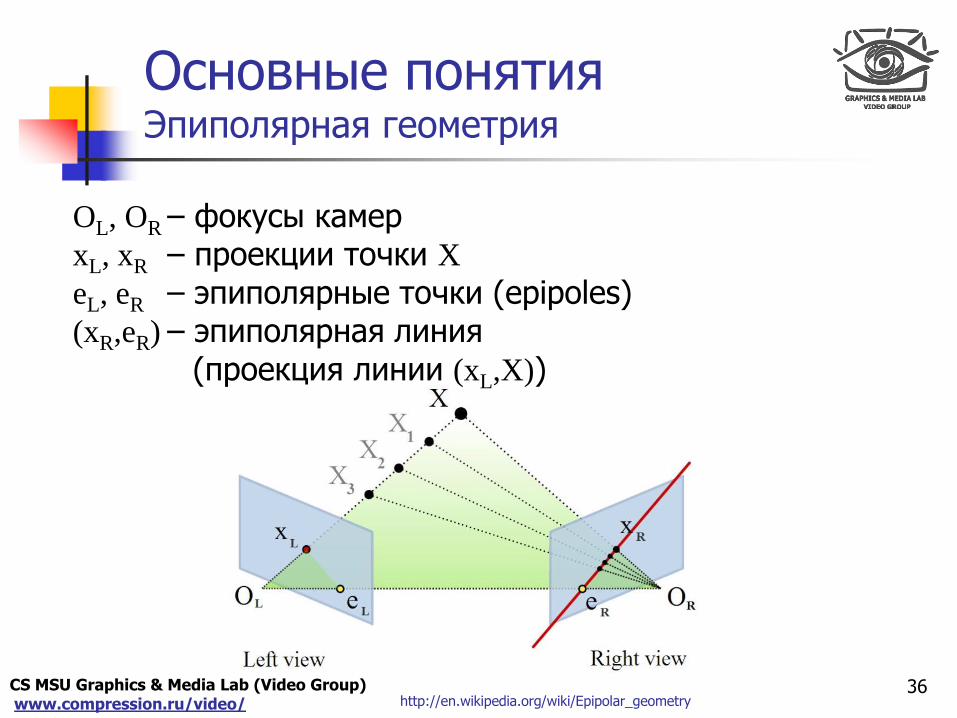
Основные понятия Эпиполярная геометрия
http://en.wikipedia.org/wiki/Epipolar_geometry
OL, OR – фокусы камер xL, xR – проекции точки X
eL, eR – эпиполярные точки (epipoles) (xR,eR) – эпиполярная линия
(проекция линии (xL,X))
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Основные понятия
37
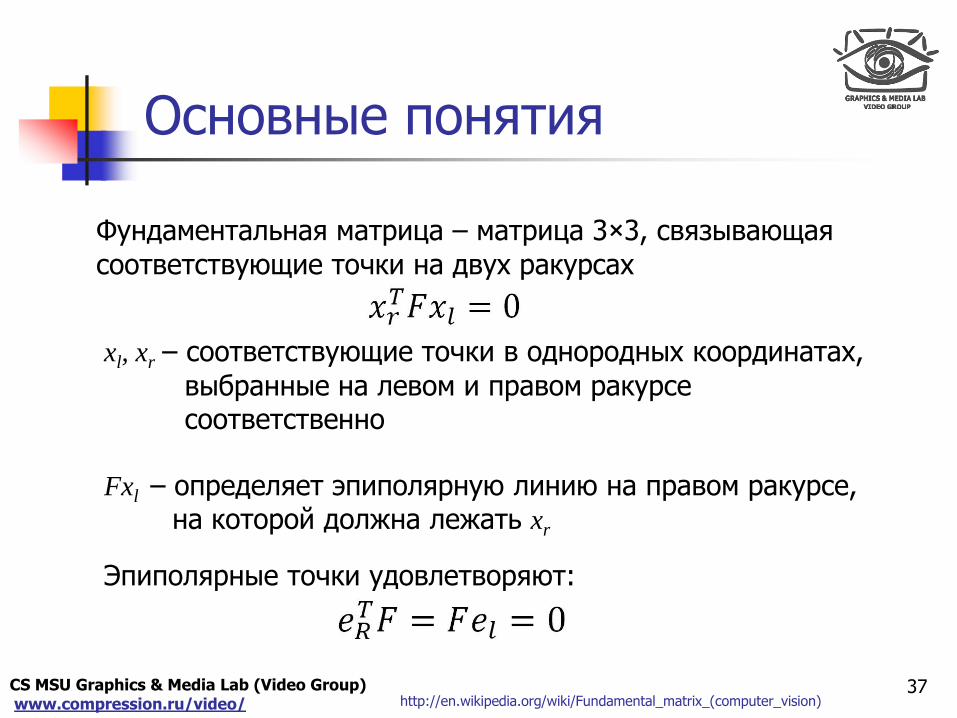
Фундаментальная матрица – матрица 3×3, связывающая
соответствующие точки на двух ракурсах
xl, xr – соответствующие точки в однородных координатах,
выбранные на левом и правом ракурсе соответственно
Fxl – определяет эпиполярную линию на правом ракурсе,
на которой должна лежать xr
Эпиполярные точки удовлетворяют:
http://en.wikipedia.org/wiki/Fundamental_matrix_(computer_vision)
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
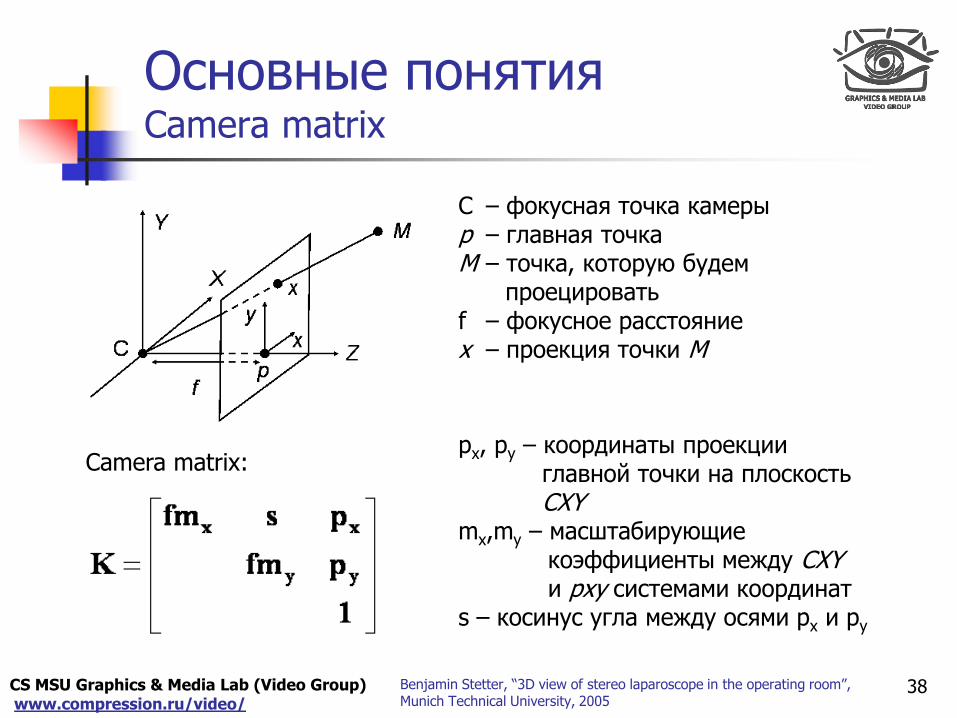
Основные понятия Camera matrix
38
С – фокусная точка камеры p – главная точка M – точка, которую будем
проецировать f – фокусное расстояние x – проекция точки M
Camera matrix: px, py – координаты проекции
главной точки на плоскость CXY
mx,my – масштабирующие коэффициенты между CXY и pxy системами координат
s – косинус угла между осями px и py
Benjamin Stetter, “3D view of stereo laparoscope in the operating room”, Munich Technical University, 2005
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
39
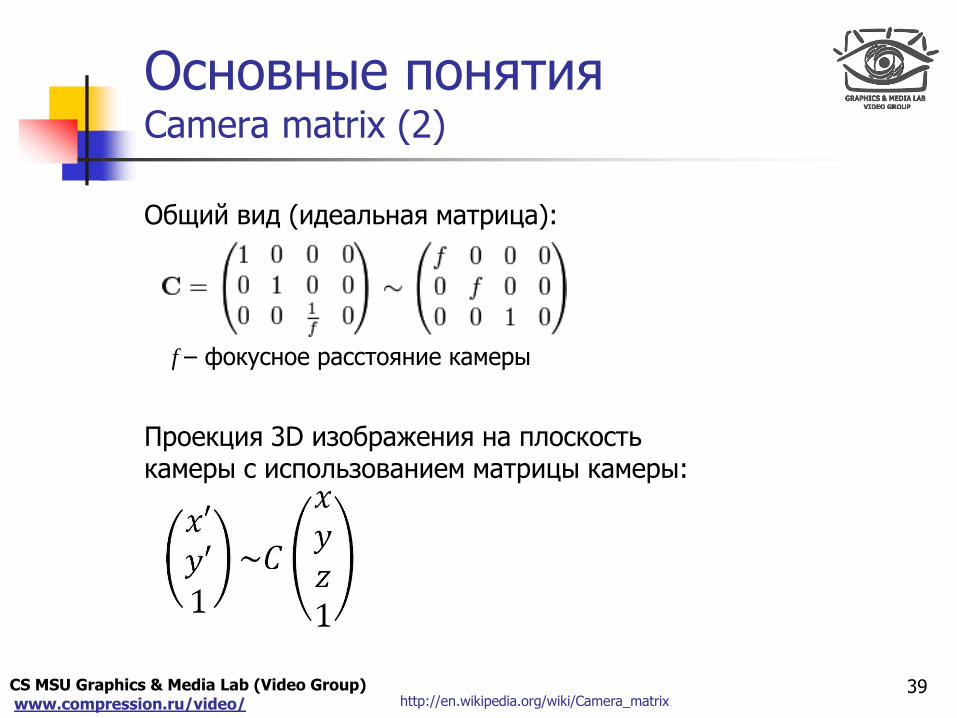
Основные понятия Camera matrix (2)
Общий вид (идеальная матрица):
Проекция 3D изображения на плоскость камеры с использованием матрицы камеры:
f – фокусное расстояние камеры
http://en.wikipedia.org/wiki/Camera_matrix
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Основные понятия
Постановка задачи
Ректификация
Perception optimization
Временная синхронизация
Заключение 40
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Ректификация
Постановка задачи:
Найти такие проективные преобразования для двух
ракурсов, что после их применения будут отсутствовать:
вертикальный параллакс
поворот изображений друг относительно друга
искажения вертикальной перспективы
41
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
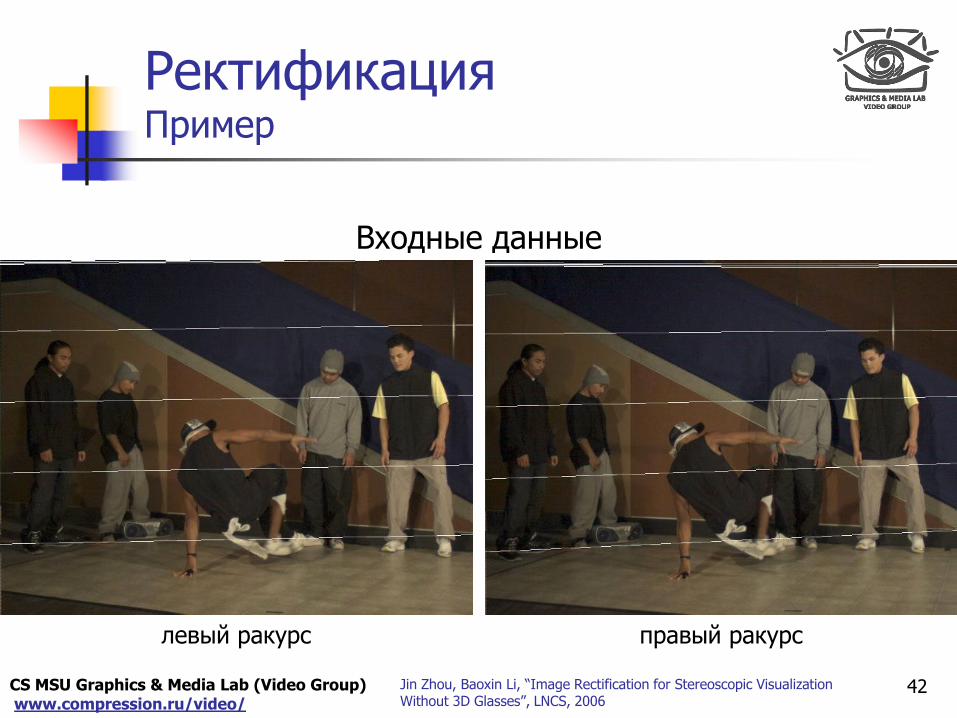
Ректификация Пример
42
левый ракурс правый ракурс
Входные данные
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
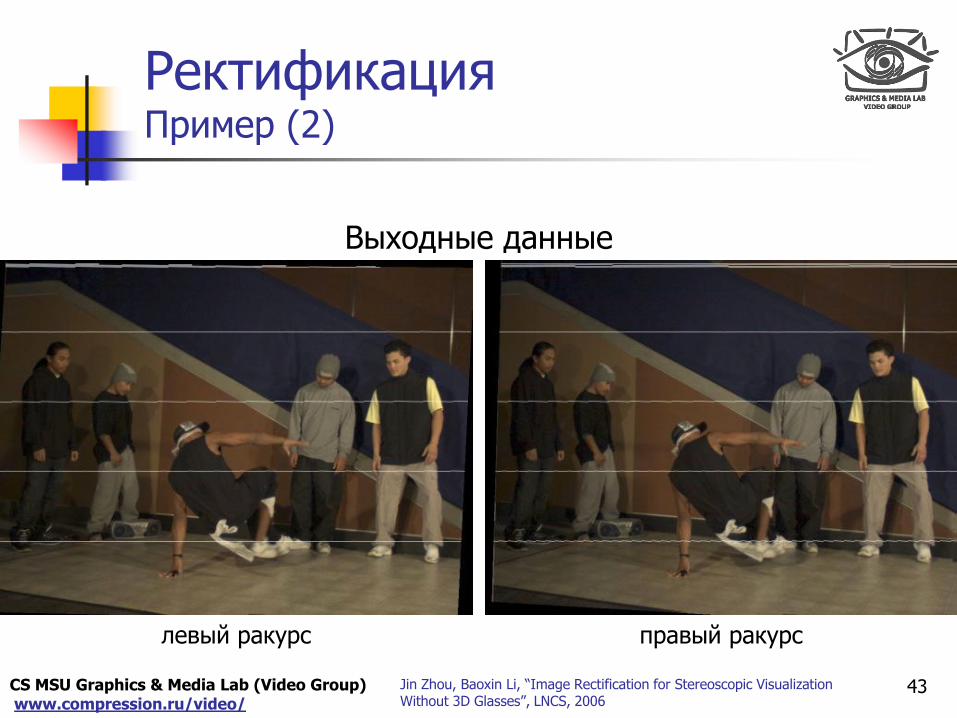
Ректификация Пример (2)
43
левый ракурс правый ракурс
Выходные данные
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Ректификация Пример (3)
44
входные данные выходные данные
Сравнение
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Основные понятия
Постановка задачи
Ректификация
Perception optimization
Временная синхронизация
Заключение 45
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
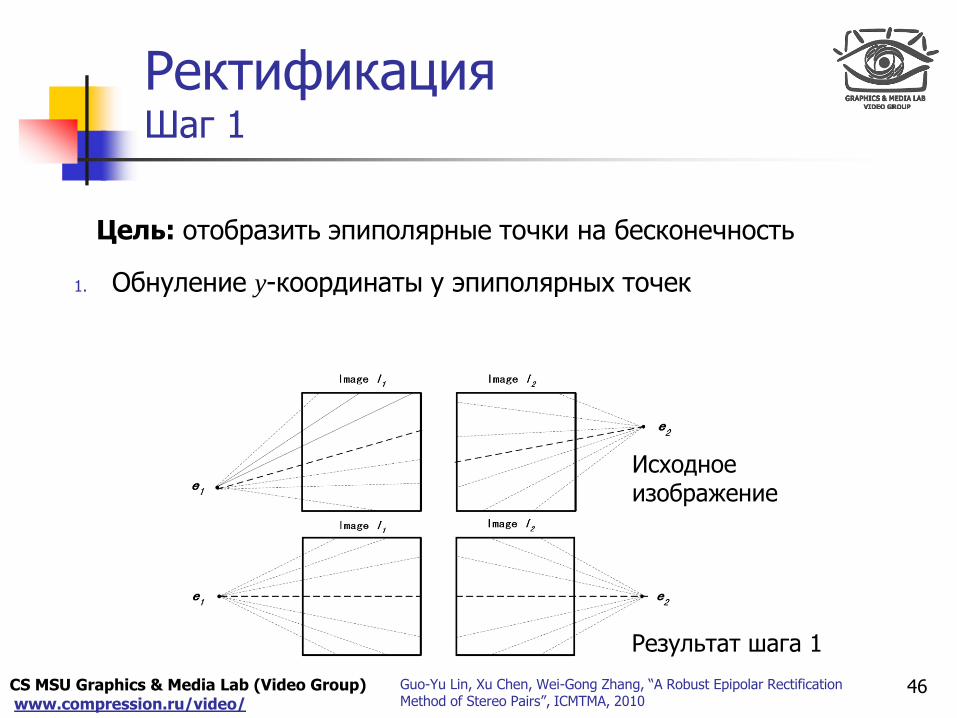
Ректификация Шаг 1
46
Цель: отобразить эпиполярные точки на бесконечность
1. Обнуление y-координаты у эпиполярных точек
Исходное изображение
Результат шага 1
Guo-Yu Lin, Xu Chen, Wei-Gong Zhang, “A Robust Epipolar Rectification Method of Stereo Pairs”, ICMTMA, 2010
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
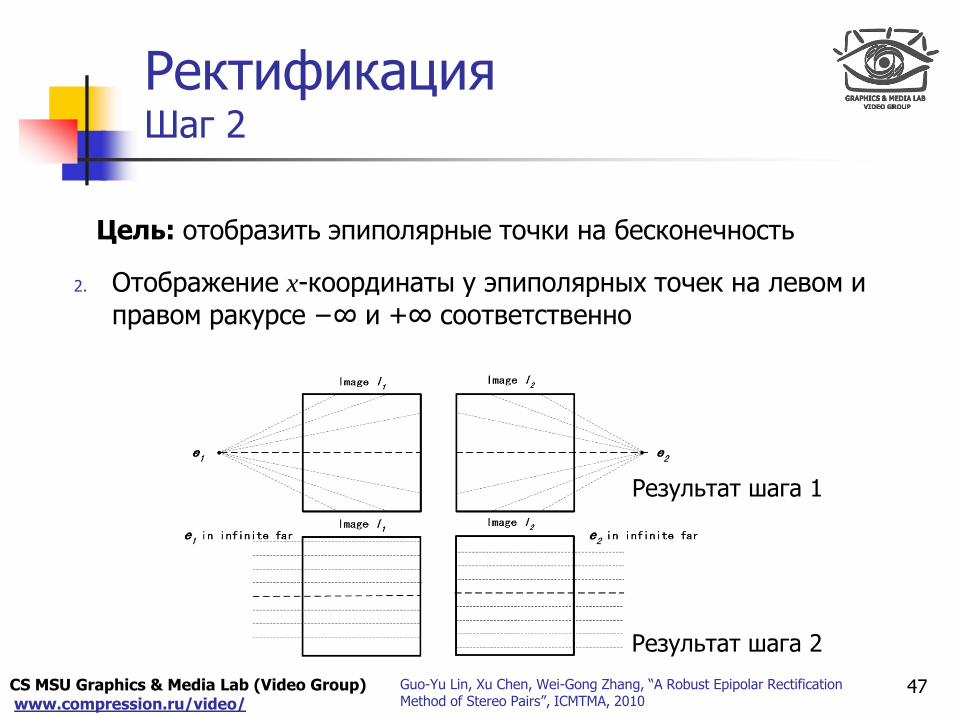
Ректификация Шаг 2
47
Цель: отобразить эпиполярные точки на бесконечность
2. Отображение x-координаты у эпиполярных точек на левом и
правом ракурсе −∞ и +∞ соответственно
Guo-Yu Lin, Xu Chen, Wei-Gong Zhang, “A Robust Epipolar Rectification Method of Stereo Pairs”, ICMTMA, 2010
Результат шага 1
Результат шага 2
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
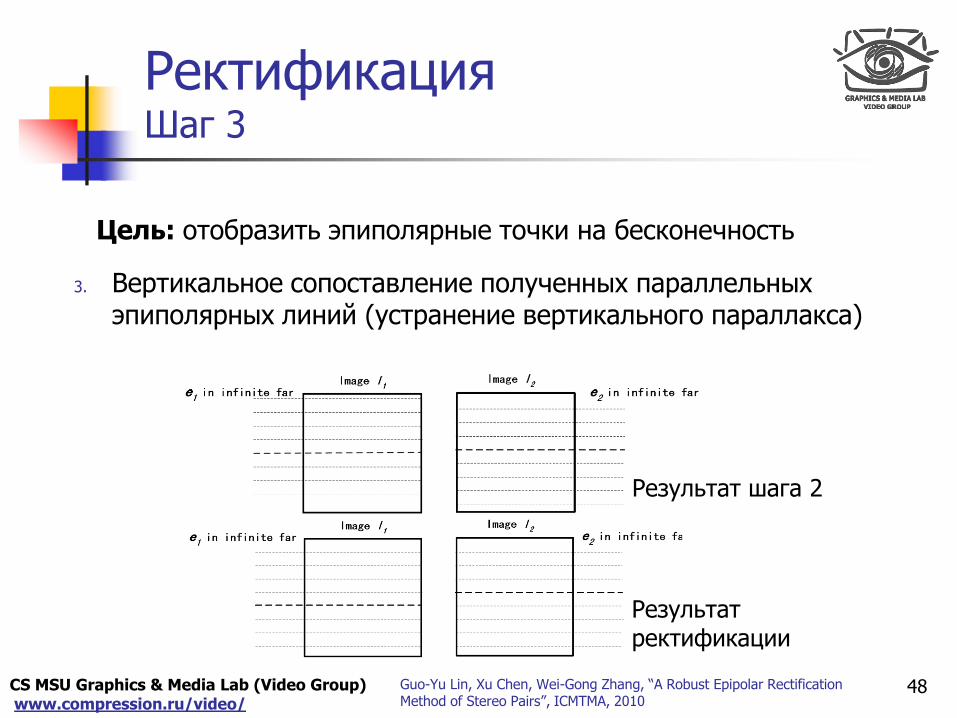
Ректификация Шаг 3
48
Цель: отобразить эпиполярные точки на бесконечность
3. Вертикальное сопоставление полученных параллельных эпиполярных линий (устранение вертикального параллакса)
Результат шага 2
Результат ректификации
Guo-Yu Lin, Xu Chen, Wei-Gong Zhang, “A Robust Epipolar Rectification Method of Stereo Pairs”, ICMTMA, 2010
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Основные понятия
Постановка задачи
Ректификация
Perception optimization
Временная синхронизация
Заключение 49
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
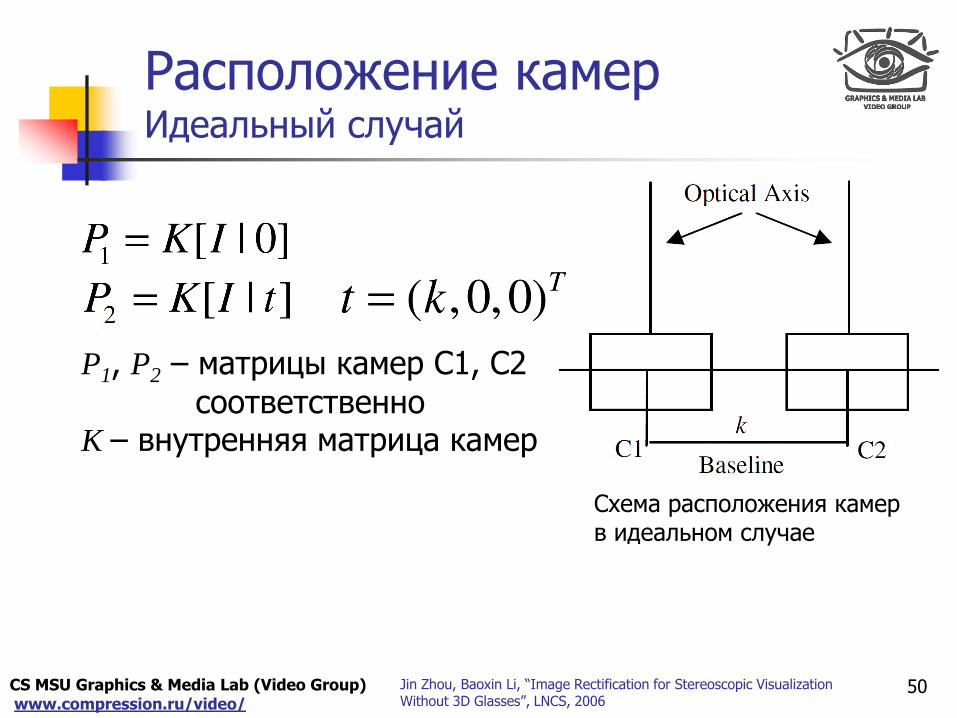
50
Схема расположения камер в идеальном случае
P1, P2 – матрицы камер С1, С2
соответственно K – внутренняя матрица камер
Расположение камер Идеальный случай
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
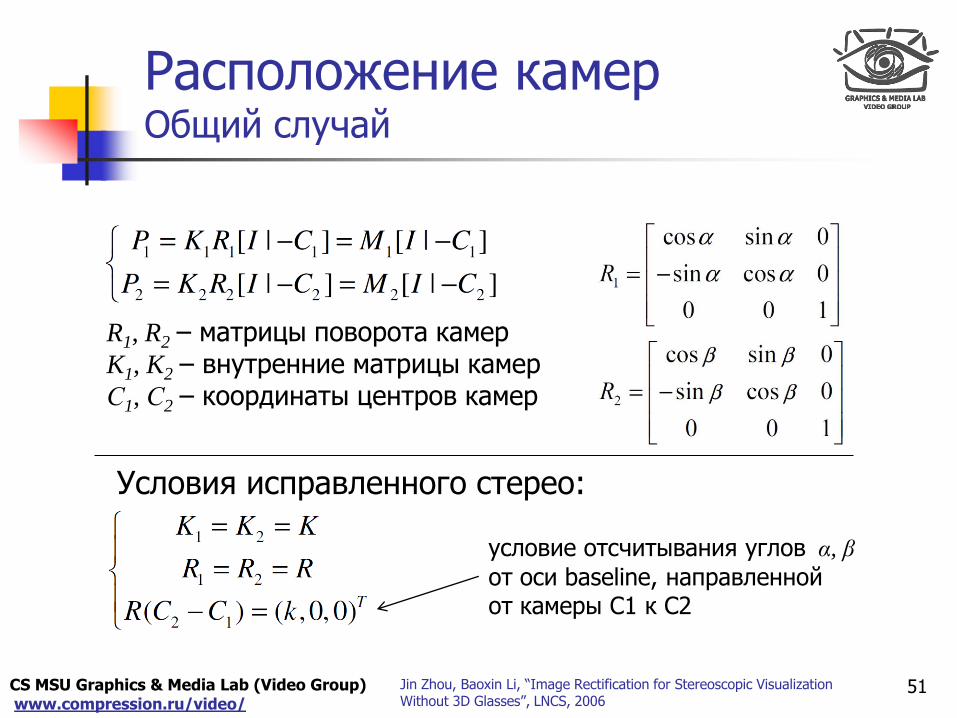
Расположение камер Общий случай
51
R1, R2 – матрицы поворота камер K1, K2 – внутренние матрицы камер С1, С2 – координаты центров камер
Условия исправленного стерео:
условие отсчитывания углов α, β
от оси baseline, направленной от камеры C1 к С2
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
52
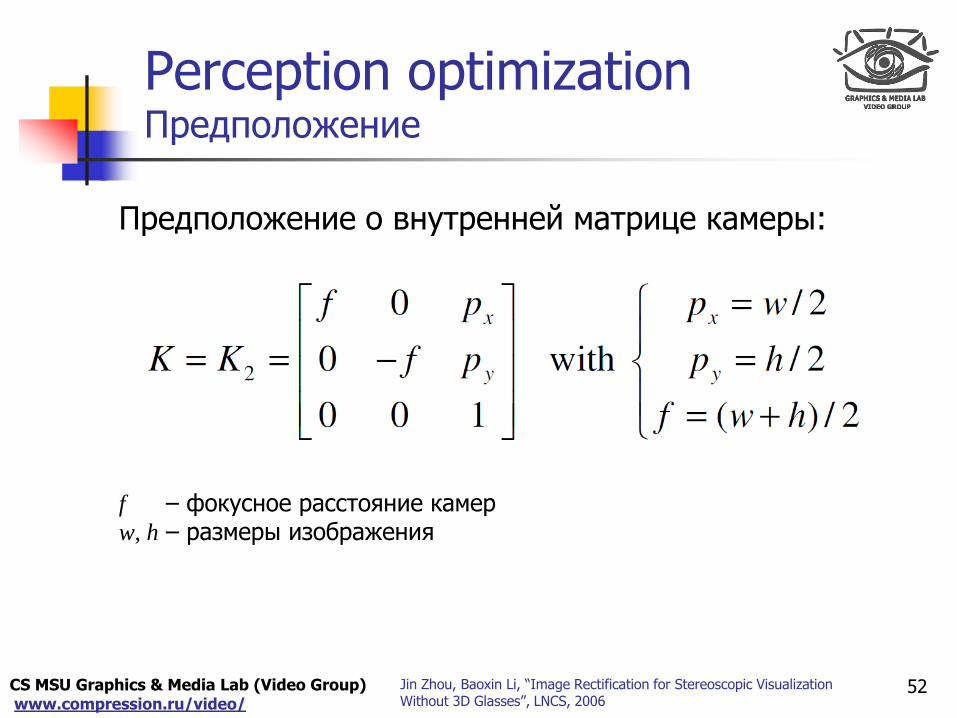
Perception optimization Предположение
Предположение о внутренней матрице камеры:
f – фокусное расстояние камер w, h – размеры изображения
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Perception optimization Параметры преобразования
Предположение:
Точки на одинаковой глубине имеют одинаковый диспаритет
Алгоритм поиска наборов соответствующих точек с одинаковой глубиной:
1. Просмотреть все найденные соответствующие точки
2. Сгруппировать точки, имеющие одинаковый диспаритет
53 Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Perception optimization Параметры преобразования (2)
54
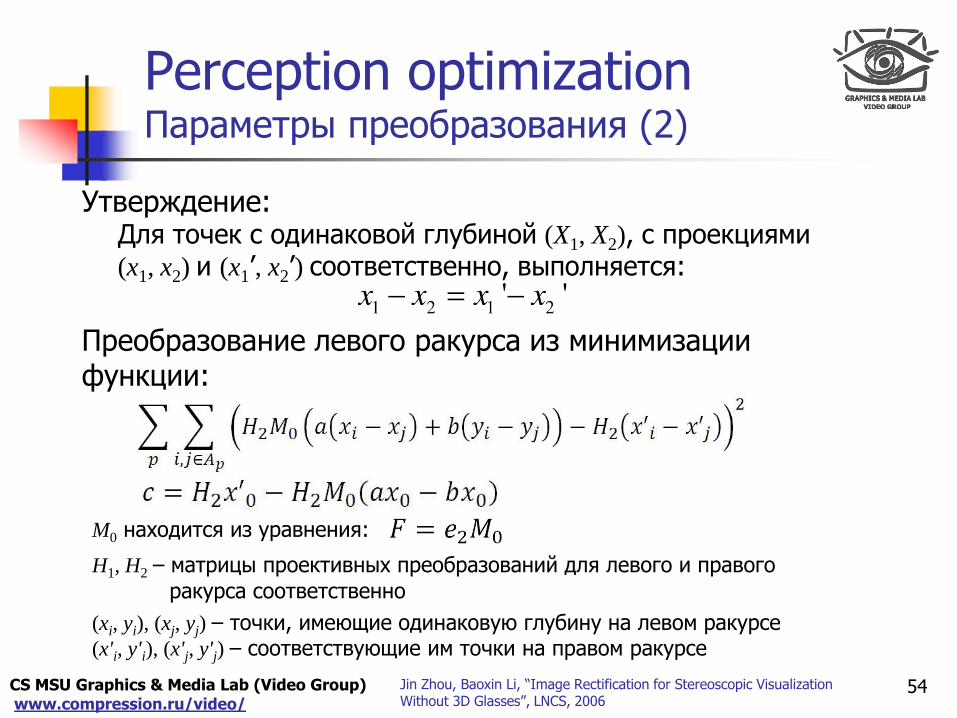
(xi, yi), (xj, yj) – точки, имеющие одинаковую глубину на левом ракурсе (x'i, y'i), (x'j, y'j) – соответствующие им точки на правом ракурсе
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
Утверждение: Для точек с одинаковой глубиной (X1, X2), с проекциями (x1, x2) и (x1’, x2’) соответственно, выполняется:
Преобразование левого ракурса из минимизации функции:
M0 находится из уравнения:
H1, H2 – матрицы проективных преобразований для левого и правого
ракурса соответственно
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
55
Perception optimization Параметры преобразования (3)
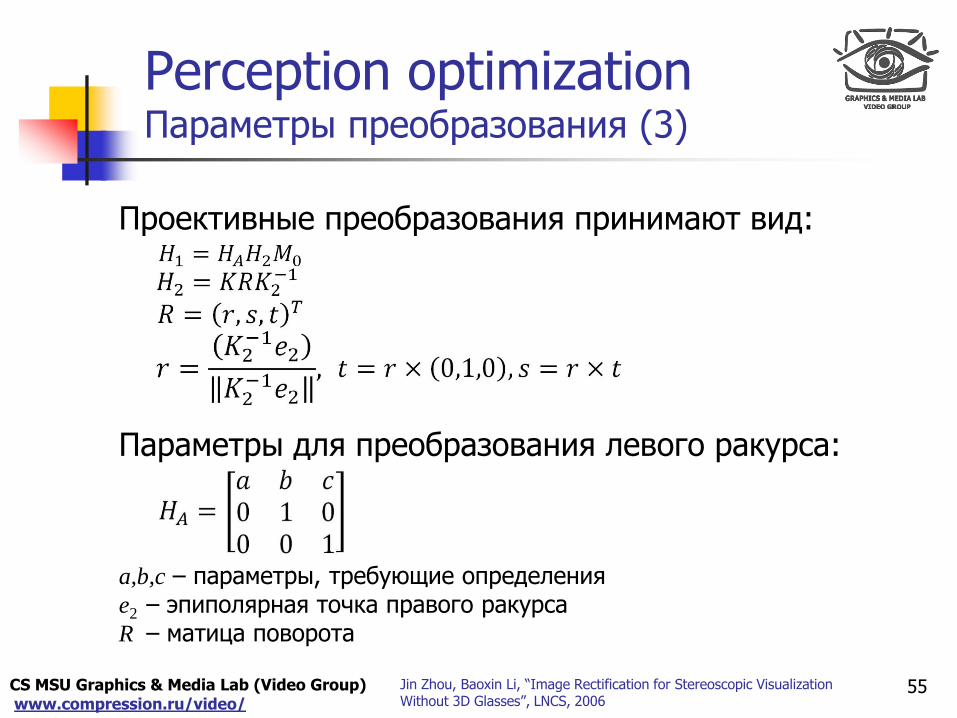
Проективные преобразования принимают вид:
a,b,c – параметры, требующие определения e2 – эпиполярная точка правого ракурса R – матица поворота
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
Параметры для преобразования левого ракурса:

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Perception optimization Результат
56
левый ракурс правый ракурс
Входные данные
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
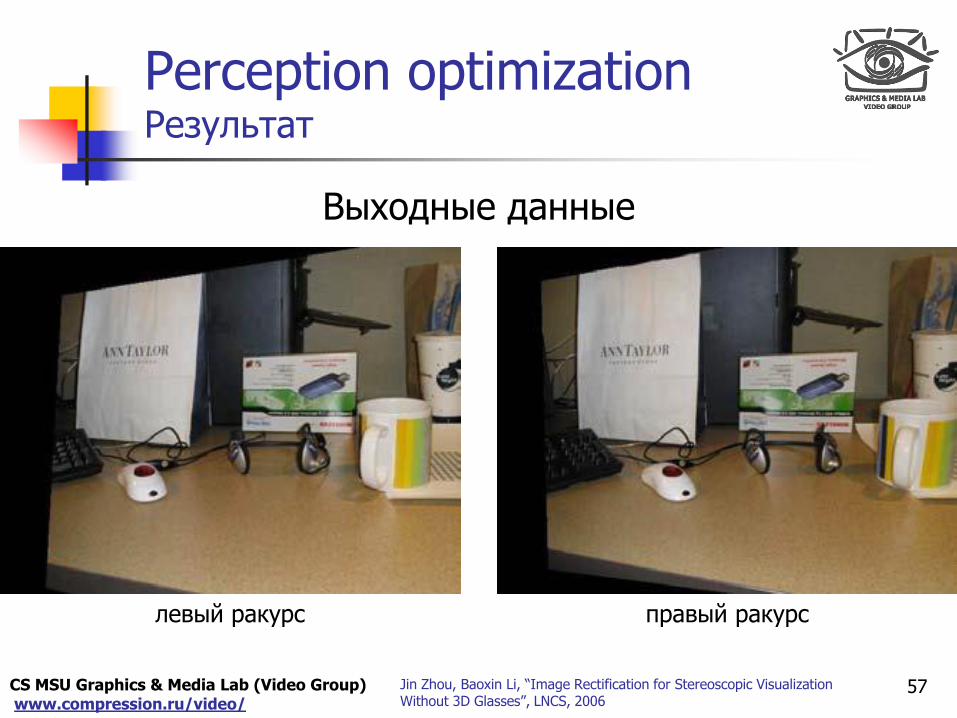
Perception optimization Результат
57
левый ракурс правый ракурс
Выходные данные
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
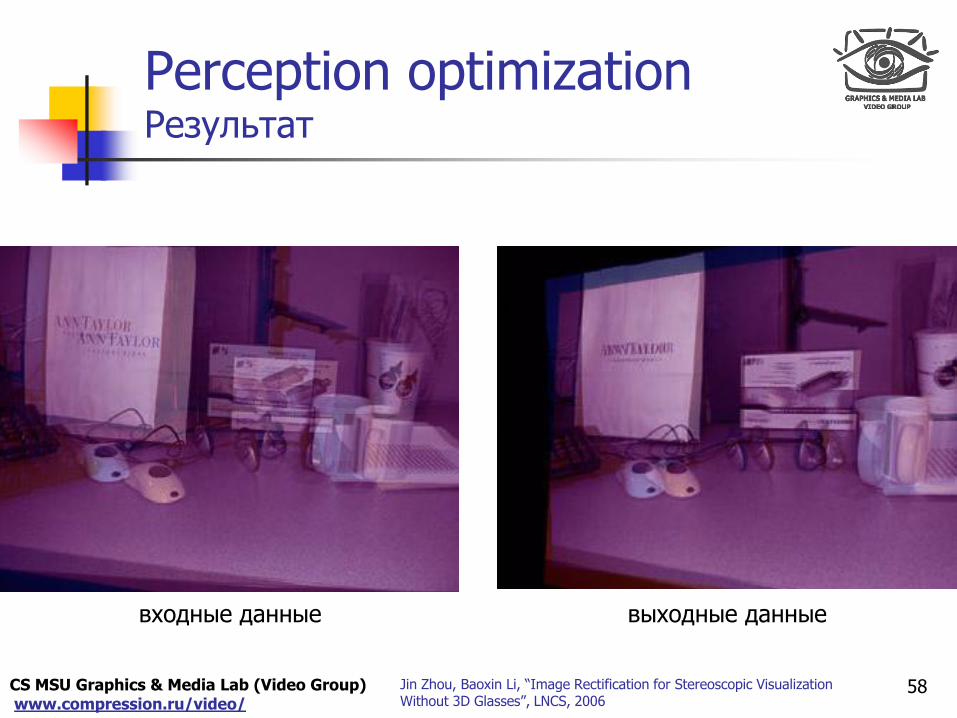
Perception optimization Результат
58
входные данные выходные данные
Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Выводы
Достоинство:
Результат выглядит как отснятый с помощью стандартной установки камер
Недостаток:
Высокая вычислительная сложность
59 Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, LNCS, 2006
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Временная синхронизация
Direct alignment algorithm
Feature-based algorithm
Заключение
60
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Временная синхронизация
Постановка задачи:
Определить величину временного сдвига в количестве кадров между видеопоследовательностями, снятыми с разных ракурсов
61
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Временная синхронизация
Direct alignment algorithm
Feature-based algorithm
Заключение
62
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Direct alignment algorithm Обозначения
63 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
x – точка в эталонной последовательности x ' – соответствующая ей точка во входной
последовательности u' – пространственно-временной сдвиг
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
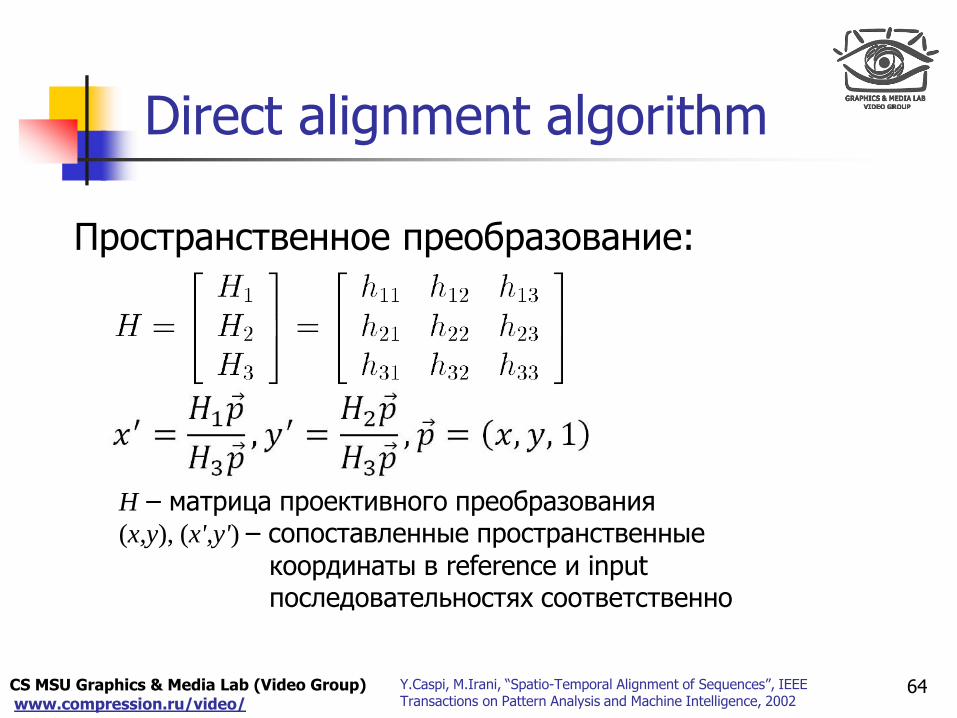
Пространственное преобразование:
Direct alignment algorithm
64
H – матрица проективного преобразования (x,y), (x',y') – сопоставленные пространственные
координаты в reference и input последовательностях соответственно
Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Direct alignment algorithm
65
t, t' – сопоставленные моменты времени s – отношение частот кадров двух камер, обычно известно Δt – временной сдвиг между видеопоследовательностями
Временное преобразование:
Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
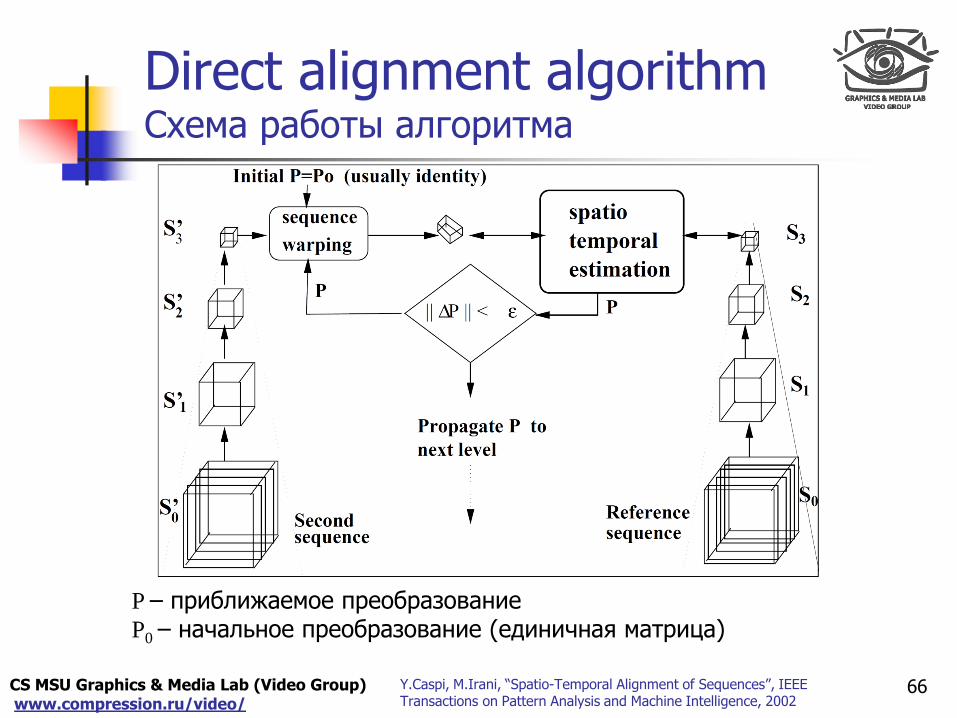
Direct alignment algorithm Схема работы алгоритма
66
P – приближаемое преобразование P0 – начальное преобразование (единичная матрица)
Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Direct alignment algorithm Определение преобразования
Параметры для определения:
67
S, S' – яркость точки (x,y,t) в reference и input последовательностях
соответственно – искомое преобразование
Для минимизации функции ошибки ERR(P) применяется алгоритм
Гаусса-Ньютона
SSD error function:
P
Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Fireworks sequence Входные данные
68 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Fireworks sequence Наложение
69 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Fireworks sequence Результат
70 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Light sequence Входные данные
71 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
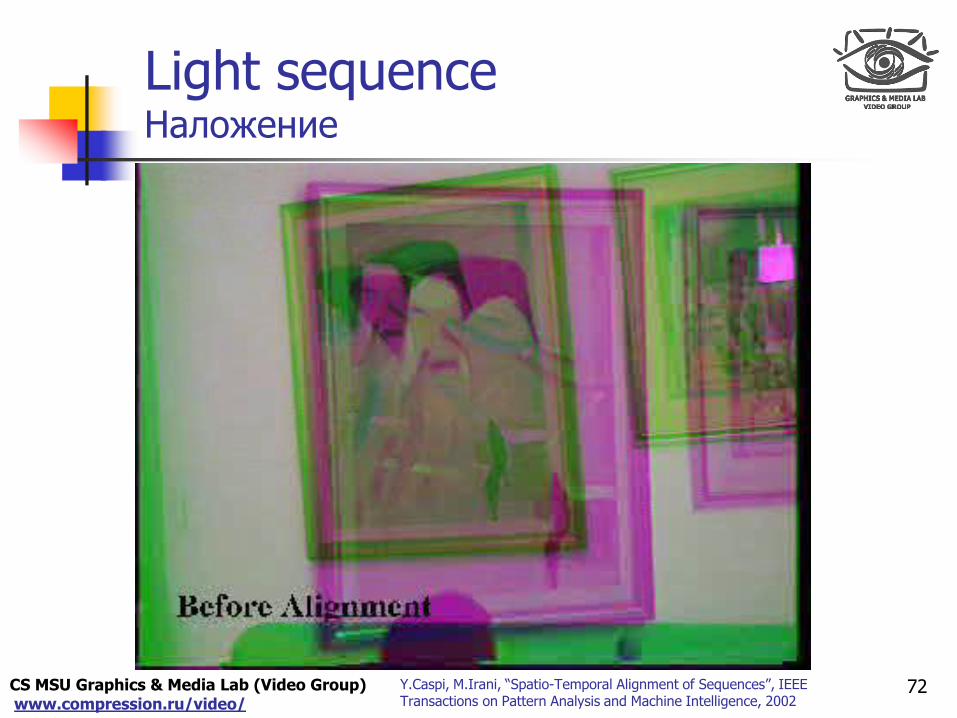
Light sequence Наложение
72 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
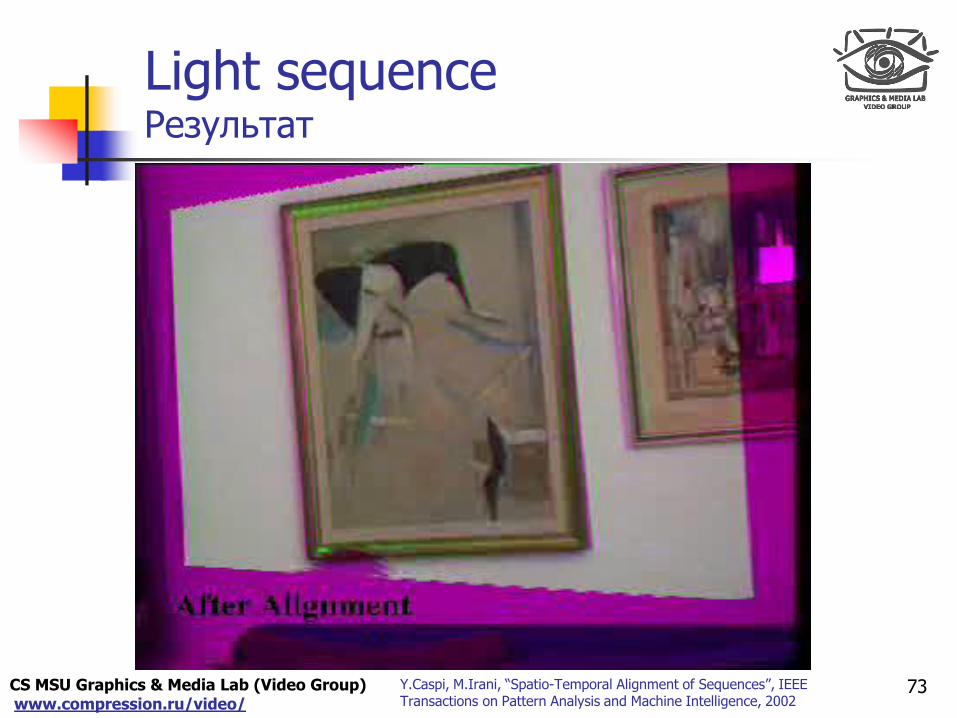
Light sequence Результат
73 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Wind sequence Входные данные
74 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002

CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Wind sequence Наложение
75 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
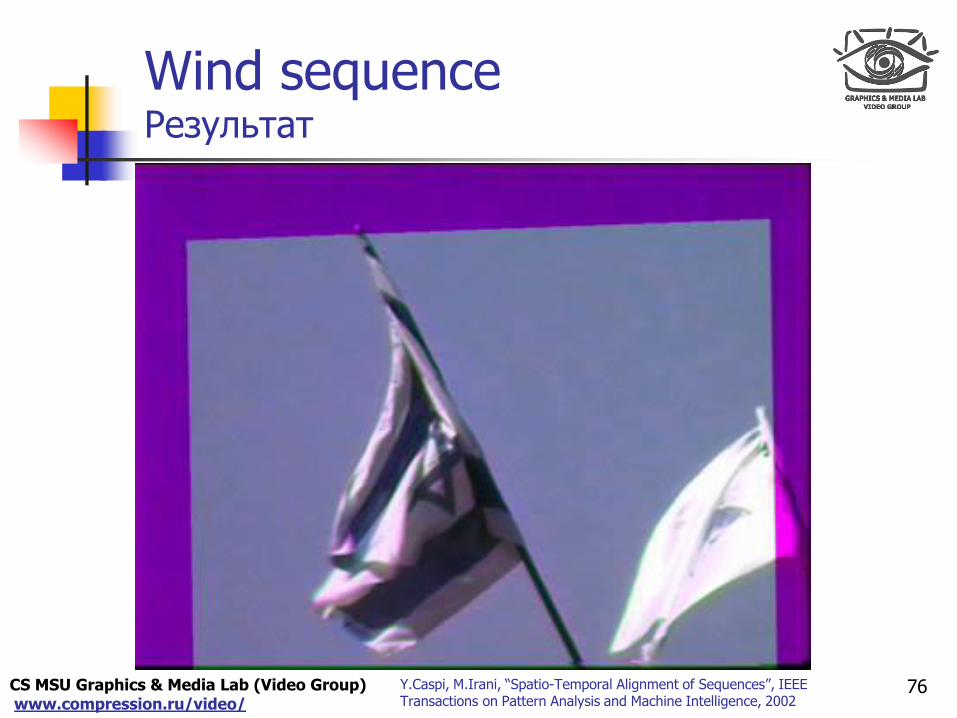
Wind sequence Результат
76 Y.Caspi, M.Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Выводы
Достоинство:
Высокая точность
Недостаток:
Объекты должны быть удалены от камер на расстояние на порядок большее расстояния между камерами
77 Y.Caspi, M.Irani, "Spatio-Temporal Alignment of Sequences", IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Временная синхронизация
Direct alignment algorithm
Feature-based algorithm
Заключение
78
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
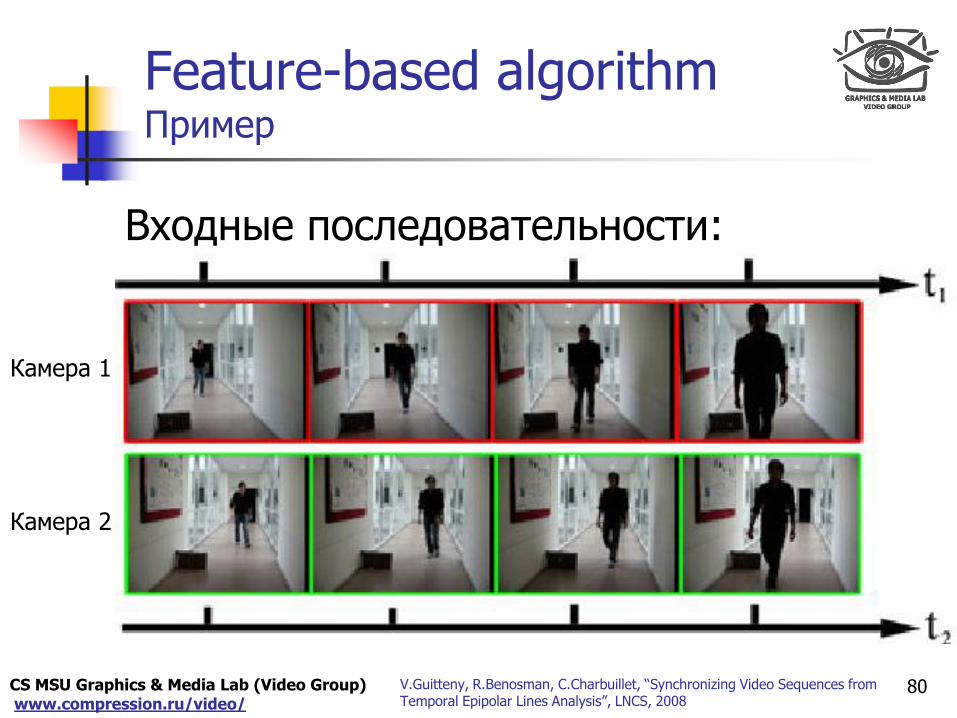
Feature-based algorithm
Алгоритм:
1. Вычисление фундаментальной матрицы, определение эпиполярных линий (с использованием SIFT)
2. Построение следа изобажений на эпиполярных линиях
3. Определение временного сдвига по полученному следу
79 V.Guitteny, R.Benosman, C.Charbuillet, “Synchronizing Video Sequences from Temporal Epipolar Lines Analysis”, LNCS, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Feature-based algorithm Пример
80
Камера 1
Камера 2
Входные последовательности:
V.Guitteny, R.Benosman, C.Charbuillet, “Synchronizing Video Sequences from Temporal Epipolar Lines Analysis”, LNCS, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
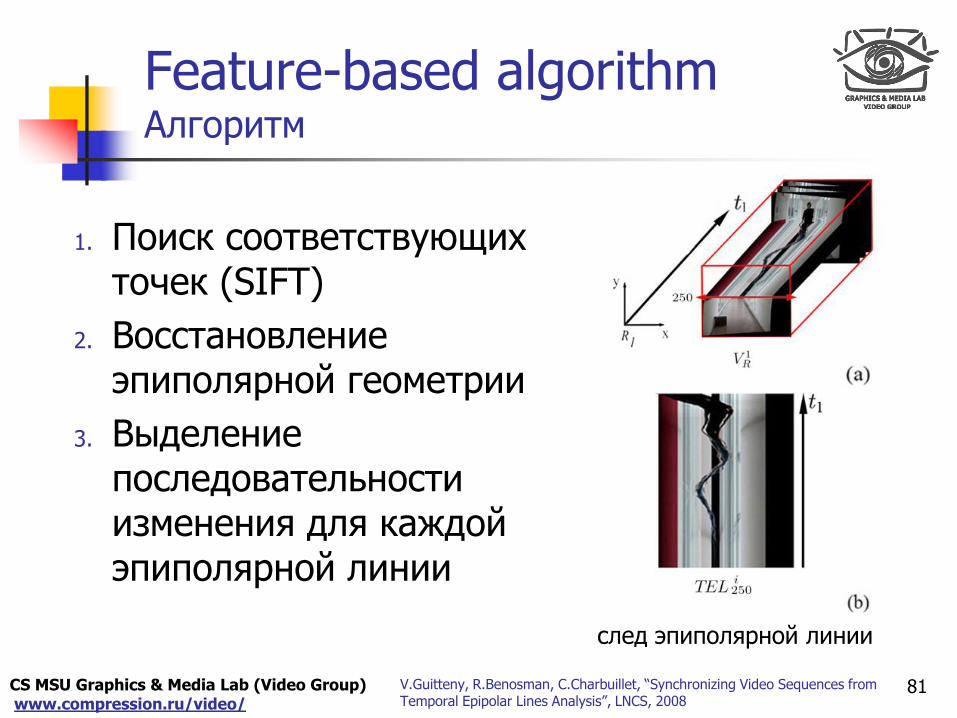
Feature-based algorithm Алгоритм
81
1. Поиск соответствующих точек (SIFT)
2. Восстановление эпиполярной геометрии
3. Выделение последовательности изменения для каждой эпиполярной линии
след эпиполярной линии
V.Guitteny, R.Benosman, C.Charbuillet, “Synchronizing Video Sequences from Temporal Epipolar Lines Analysis”, LNCS, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
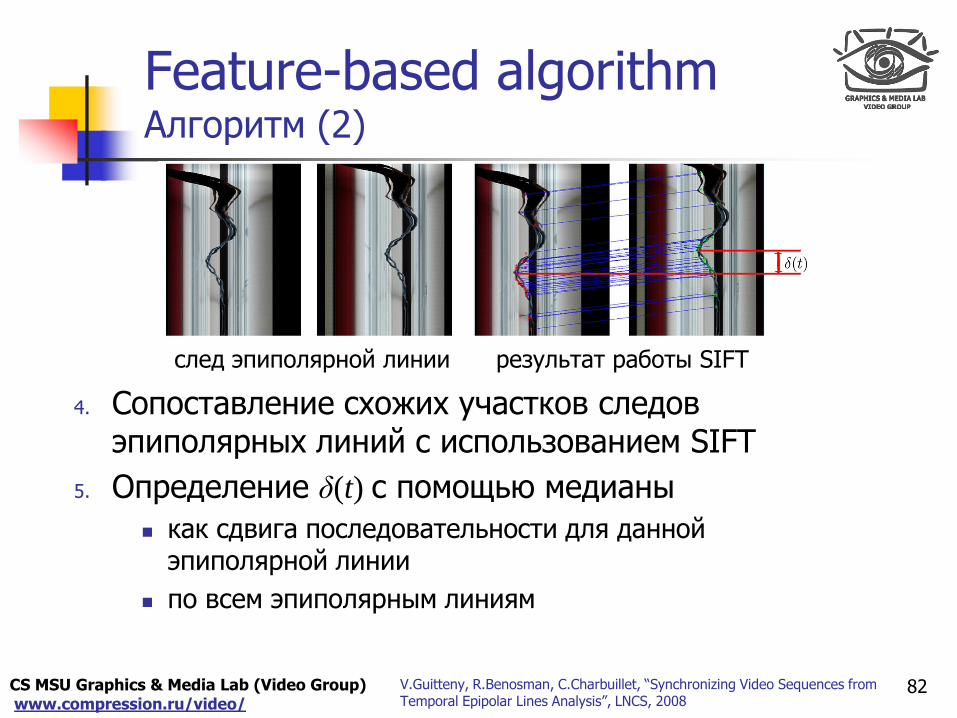
Feature-based algorithm Алгоритм (2)
4. Сопоставление схожих участков следов эпиполярных линий с использованием SIFT
5. Определение δ(t) с помощью медианы
как сдвига последовательности для данной эпиполярной линии
по всем эпиполярным линиям
82
результат работы SIFT след эпиполярной линии
V.Guitteny, R.Benosman, C.Charbuillet, “Synchronizing Video Sequences from Temporal Epipolar Lines Analysis”, LNCS, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Выводы
Достоинства:
Интересный алгоритм
Возможность адаптации к потерянным кадрам
Недостатки:
Неустойчивость к активному движению по всем эпиполярным линиям
Запуск камер должен производиться в статичном положении
83 V.Guitteny, R.Benosman, C.Charbuillet, “Synchronizing Video Sequences from Temporal Epipolar Lines Analysis”, LNCS, 2008
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Содержание
Введение
Цветокоррекция
Исправление геометрии
Временная синхронизация
Заключение
84
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Заключение
Рассмотрены алгоритмы:
цветокоррекции, основанные на глобальном и локальном преобразовании
исправления геометрии, основанные на восстановлении эпиполярной геометрии
синхронизации стерео видео с использованием эпиполярной геометрии и без неё
85
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Заключение Дальнейшие планы
Реализовать алгоритмы:
цветокоррекции hybrid color correction
синхронизации по времени
коррекции геометрии с использованием эпиполярной геометрии с возможностью определения:
вертикального параллакса
поворота ракурсов
искажения вертикальной перспективы
86
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Литература
1. Kenji Yamamoto, Ryutaro Oi, “Color Correction for Multi-view Video Using Energy Minimization of View Networks”, International Journal of Automation and Computing, 2008
2. Jung-Jae Yu, Hae-Dong Kim, Ho-Wook Jang, Seung-Woo Nam, “A hybrid color matching between stereo image sequences”, 3DTV Conference: The True Vision – Capture, Transmission and Display of 3D Video (3DTV-CON), 2011
3. Jin Zhou, Baoxin Li, “Image Rectification for Stereoscopic Visualization Without 3D Glasses”, Lecture Notes in Computer Science, 2006
4. Yaron Caspi, Michal Irani, “Spatio-Temporal Alignment of Sequences”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002
5. Vincent Guitteny, Ryad Benosman, Christophe Charbuillet, “Synchronizing Video Sequences from Temporal Epipolar Lines Analysis”, Lecture Notes in Computer Science, 2008
87
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus
Литература (2)
6. Feng Shao, Zongju Peng, You Yang, “Color correction for multi-view video based on background segmentation and dominant color extraction”, The World Scientific and Engineering Academy and Society (WSEAS) Transactions on Computers, 2008
7. Daniel Wedge, “Video Sequence Synchronization”, The University of Western Australia, 2007
8. http://en.wikipedia.org/wiki/Histogram_matching
9. http://en.wikipedia.org/wiki/Homogeneous_coordinates
10. http://en.wikipedia.org/wiki/Epipolar_geometry
11. http://en.wikipedia.org/wiki/Fundamental_matrix_(computer_vision)
12. Benjamin Stetter, "3D view of stereo laparoscope in the operating room", Munich Technical University, 2005
13. http://en.wikipedia.org/wiki/Camera_matrix
14. Guo-Yu Lin, Xu Chen, Wei-Gong Zhang, "A Robust Epipolar Rectification Method of Stereo Pairs", Proceedings of the 2010 International Conference on Measuring Technology and Mechatronics Automation, 2010
88
CS MSU Graphics & Media Lab (Video Group) www.compression.ru/video/
Only for Maxus Лаборатория компьютерной
графики и мультимедиа
Видеогруппа — это:
Выпускники в аспирантурах Англии, Франции, Швейцарии (в России в МГУ и ИПМ им. Келдыша)
Выпускниками защищено 5 диссертаций
Наиболее популярные в мире сравнения видеокодеков
Более 3 миллионов скачанных фильтров обработки видео
89