РСБН Л.Р.№ 4
37
РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ БЛИЖНЕЙ НАВИГАЦИИ Радиотехнические системы ближней навигации и посадки (РСБН) являются составной частью пилотажно-навигационных комплексов, и состоят из наземного и бортового оборудования, которое обеспечивает решение следующих навигационных и посадочных задач: - автоматическое и непрерывное измерение и индикация азимута и дальности летательного аппарата относительно наземного радиомаяка системы РСБН; - автоматическое и непрерывное определение отклонения от равносигнальной зоны (линии курса и глиссады) в режиме ПОСАДКА; - автоматическое и непрерывное автономное счисление величин азимута и дальности относительно любого запрограммирован-ного радиомаяка системы РСБН; - автоматическое и непрерывное определение заданного курса и дальности до любой запрограммированной точки – промежу-точного пункта маршрута (ППМ); - автоматическое и непрерывное определение отклонения от заданной высоты при полете 1
-
Upload
gulnaz-shakirova -
Category
Documents
-
view
793 -
download
28
Transcript of РСБН Л.Р.№ 4

РАДИОТЕХНИЧЕСКИЕ СИСТЕМЫ БЛИЖНЕЙ НАВИГАЦИИ
Радиотехнические системы ближней навигации и посадки
(РСБН) являются составной частью пилотажно-навигационных
комплексов, и состоят из наземного и бортового оборудования,
которое обеспечивает решение следующих навигационных
и посадочных задач:
- автоматическое и непрерывное измерение и индикация
азимута и дальности летательного аппарата относительно
наземного радиомаяка системы РСБН;
- автоматическое и непрерывное определение отклонения от
равносигнальной зоны (линии курса и глиссады) в режиме
ПОСАДКА;
- автоматическое и непрерывное автономное счисление величин
азимута и дальности относительно любого запрограммирован-
ного радиомаяка системы РСБН;
- автоматическое и непрерывное определение заданного курса и
дальности до любой запрограммированной точки – промежу-
точного пункта маршрута (ППМ);
- автоматическое и непрерывное определение отклонения от
заданной высоты при полете самолета на крейсерской высоте
в режиме ВОЗВРАТ (на аэродром посадки);
- автоматическое и непрерывное определение отклонения от
заданной линии пути ( ) при совершении предпосадочного
маневра;
- автоматическая и непрерывная выдача управляющих сигналов
отклонения от заданного курса и высоты ( и Н) при
включении режима ПОВТОРНЫЙ ЗАХОД;
- выдача информации об азимуте и наклонной дальности
наземному радиомаяку типа РСБН для индикации координат
1

самолета на наземном индикаторном устройстве – индикаторе
кругового обзора (ИКО).
Для решения этих задач бортовая аппаратура РСБН в составе
пилотажно-навигационного комплекса сопрягается с системой
курсовертикали (СКВ), системой воздушных сигналов (СВС),
системой доплеровского счисления скорости и угла сноса (ДИСС)
и системой автоматического управления самолетом (САУ).
Состав и связи между составными частями пилотажно-
навигационного комплекса показаны на рис. 38.
Рис. 38. Пилотажно-навигационный комплекс
Наземная часть системы РСБН состоит из:
– наземного радиомаяка типа РСБН-2Н, РСБН-4Н или РСБН-6Н;
– курсового радиомаяка КРМ системы ПРМГ-4Н;
– глиссадного радиомаяка ГРМ системы ПРМГ-4Н;
– посадочного ретранслятора дальномера.
2

Рис. 39. Взаимодействие бортового и наземного оборудования РСБН
Принцип работы системы РСБН
Взаимодействие бортового и наземного оборудования РСБН
показано на рис.39 и описано ниже.
Измерение дальности
Наклонную дальность на самолете измеряют путем
определения временного интервала между запросным и ответным
сигналами (используя активный метод радиолокации).
3

При определении дальности используют:
- на земле – наземный маяк РСБН-2Н, РСБН-4Н или РСБН-6Н
(наземное приемное устройство НПУ и передатчик
импульсных дальномерных сигналов;
- на борту самолета – передатчик СЗД-ПМ, А-312-002 или А-
317-002; приемник СПАД-2И или А-312-001; блок измерения и
отработки БИО, А-312-003 или процессор сигналов А-
321-011, А-324-002; щиток управления и индикаторные
приборы – индикатор дальности ИДР-1, прибор ППД-2,
планово-навигационный прибор ПНП.
Бортовое оборудование автоматически измеряет дальность
путем измерения времени между запросным импульсом, который
излучается передатчиком с частотой 30 Гц, и ответным сигналом,
принимаемым и декодируемым приемником.
Одновременно с излучением запросного сигнала в
измерительных блоках (БИО, А-312-003, А-321-011, А-324-002)
запускается тактовый генератор, который подает импульсы в
счетный регистр. Сигнал от приемного устройства останавливает
счетный регистр и переводит его содержимое в промежуточную
память. В измерительном блоке вырабатывается строб, отстоящий
от начала счета на величину, записанную в промежуточной
памяти. В случае остановки счетного регистра принятой
приемным устройством несинхронной помехой, отстоящей от
начала счета на другую величину, новый ответный сигнал не
попадет в строб.
Измерение будет происходить до тех пор, пока ответный
сигнал не менее восьми раз (тактов) не попадет в строб,
формируемый исходя из величины задержки, записанной в
промежуточной памяти.
4

И змерение азимута
Измерение азимута заключается в определении углового
положения самолета относительно северного географического
меридиана, проходящего через точку стояния наземного
радиомаяка.
Информация об азимуте задается специальными наземными
передатчиками и автоматически измеряется самолетным оборудо-
ванием.
Для измерения азимута используется следующий комплекс
оборудования:
- на земле – передатчик опорных импульсных сигналов и пере-
датчик непрерывного азимутального сигнала;
- на борту самолета - передатчик СЗД-ПМ, А-312-002 или
А-317-002, приемник СПАД-2И или А-312-001, блок измере-
ния и отработки БИО, А-312-003 или процессор сигналов
А-321-011, А-324-002, щиток управления и индикаторные
приборы – цифровой индикатор азимута ЦИА-1,
навигационно-плановый прибор НПП или планово-
навигационный прибор ПНП.
Передатчик непрерывного азимутального сигнала работает в
режиме непрерывной генерации и нагружен на вращающуюся
антенну, которая в горизонтальной плоскости формирует
двухлепестковую диаграмму направленности. Антенна вращается
с частотой 100 оборотов в минуту, или 1,66 Гц. В момент
облучения самолета на вход приемника поступает радиоимпульс,
огибающая которого имеет двойную колокольную форму.
Частота следования этого сигнала 1,66 Гц, длительность 20 мс
на уровне 0,5. Двухлепестковая форма сигнала применена для
повышения точности при отсчете момента облучения самолета по
5

методу минимума сигнала и для обеспечения помехозащищен-
ности.
Передатчик импульсных сигналов нагружен на антенну,
имеющую круговую диаграмму направленности.
Для выработки опорных сигналов модулятор наземного
передатчика азимутальных импульсных сигналов синхронизиру-
ется специальными датчиками. Они установлены на двух дисках,
расположенных на оси вращающейся антенны. На одном их них
расположено 36 магнитопроводящих вставок, на другом – 35.
Только в момент, когда электрическая ось вращающейся антенны
направлена на географический север, совпадают по одной вставке
на каждом диске. Следовательно, за один оборот азимутальной
антенны излучается соответственно 35 и 36 импульсов.
Эти импульсы принято называть: опорные 36 и опорные 35 .
Азимутальный канал бортового приемника постоянно
принимает опорные 35 и 36. Благодаря раздельному кодированию
они обрабатываются в параллельных каналах. На выходе этих
каналов вырабатываются видеоимпульсы 35 и 36. При их
совпадении вырабатывается строб северного совпадения, который
запускает счетную схему.
Азимутальные импульсы, имеющие двойную колокольную
форму, после обработки в приемном устройстве преобразуются в
остроконечные импульсы, которые во времени соответствуют
середине двойного колокольного импульса (азимутальные
импульсы).
Время, измеренное от северного совпадения до азимутального
импульса пропорционально азимуту самолета.
6

Наземная индикация координат самолета
Наземная индикация координат самолета заключается в
определении координат самолета наземными средствами и
опознавании номера самолета. Текущие координаты самолета в
виде азимута и дальности определяются наземными маяками
РСБН и отсчитываются по индикатору кругового обзора ИКО.
Наземный передатчик дальномерных импульсов формирует
трехимпульсные сигналы запроса наземной индикации.
Передатчик постоянно синхронизируется от вращающейся
азимутальной антенны. Через каждые 2 градуса поворота
азимутальной антенны вырабатываются синхронизирующие
сигналы, поэтому частота следования импульсов запроса наземной
индикации составляет 300 Гц (1,66 х 180).
Импульсы запроса наземной индикации, принятые бортовым
приемником, преобразуются в импульсы запуска бортового
передатчика. Передатчик излучает сигнал – ответ наземной
индикации (ОНИ) – только в момент облучения самолета
азимутальным импульсом. Таким образом, на индикаторе ИКО
появляется яркостная метка, расстояние которой от центра
индикатора соответствует наклонной дальности до самолета,
а расположение относительно северного направления на ИКО –
азимуту самолета.
Опознавание самолета производится по двойной яркостной
отметке. По команде наземного диспетчера конкретному самолету
– включить опознавание – на приборной доске самолета нажимают
кнопку ОПОЗНАВАНИЕ. При этом бортовой передатчик излучает
две радиопосылки ОНИ. Сигнал ОНИ составлен из двух кодовых
групп ответа индикации, соответствующих ненаправленному
режиму работы аппаратуры. Временной интервал между этими
группами составляет 96 мкс. В режиме опознавания сигналы ОНИ
7

передаются двукратным повторением через 64мкс. В результате
этого на ИКО возникает сдвоенная яркостная отметка данного
самолета.
Измерение отклонения от курса посадки
Зона действия курсового маяка (рис.40):
- в горизонтальной плоскости – сектор не менее ± 15 °
относительно курсовой линии;
- в вертикальной плоскости – ограничивается снизу прямой,
проходящей через центр антенной системы, точку над началом
ВПП на высоте 5 м и прямой, идущей от этой точки под углом
0,85 ° к горизонту, а сверху – прямой, идущей от центра
антенной системы под углом 7 ° к горизонту;
- по дальности – в секторе ± 10 ° относительно курсовой линии
в направлении захода на посадку не менее 45 км. При
совместной работе с бортовой аппаратурой обеспечивается
дальность не менее 20 км при полете на высоте 300 м,
80 км – на высоте 1000 м и 180 км – на высоте 10 000 м.
Курсовой сектор – сектор в любой заданной горизонтальной
плоскости, содержащий курсовую линию и ограниченный
геометрическими местами точек, в которых коэффициент
разнослышимости равен 33%.
Для системы ПРМГ-4 величина курсового сектора лежит в
пределах от 4 до 6 ° .
Коэффициент разнослышимости (КРС) определяется по
формуле:
,
где и - напряжения, пропорциональные амплитудам сигналов
с частотой 1300 и 2100 Гц.
8

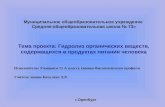
Рис. 40. Зоны действия курсового радиомаяка: а) – в горизонтальной плоскости; б) – в вертикальной плоскости.
Курсовой линией называется геометрическое место точек в
заданной горизонтальной плоскости, в которых КРС равен нулю.
Зона действия курсового радиомаяка формируется двумя
парами вибраторов, которые переключаются бесконтактным
антенным коммутатором с частотой 13 Гц и излучают
направленные высокочастотные колебания, модулируемые по
амплитуде частотами 1300 и 2100 Гц. Диапазон работы курсовых
маяков соответствует диапазону работы азимутального канала.
Индикация курса на приборе НПП показана на рис. 41.
9

Рис. 41. Индикация отклонения самолета от зоны курса
Измерение отклонения от глиссады планирования
Зона действия глиссадного маяка:
- в горизонтальной плоскости ограничивается сектором не
менее ± 8 ° относительно линии курса;
- в вертикальной плоскости ограничивается сектором величи-
ной (0,3 ¸1,75) x относительно горизонта, где угол x - угол
глиссады. Оптимальным углом считается угол, равный 2 °40¢ ;
Глиссадой называется геометрическое место точек в
вертикальной плоскости, проходящей через курсовую линию, в
которой КРС равен нулю.
Определение зоны действия глиссады приведено на рис. 42 и
рис. 43.
10

Рис. 42. Зона действия глиссадного маяка в горизонтальной плоскости
Рис. 43. Зона действия глиссадного маяка в вертикальной плоскости
Зона действия глиссадного радиомаяка формируется двумя
парами вибраторов, которые переключаются бесконтактным
антенным коммутатором с частотой 13 Гц и излучают направ-
ленные высокочастотные колебания, модулируемые по амплитуде
частотами 1300 и 2100 Гц, причем колебания с частотой 2100 Гц
11

поступают в антенну нижнего луча, а с частотой 1300 Гц – в
антенну верхнего луча. Диапазон работы курсовых маяков
соответствует диапазону работы дальномерного канала.
Индикация глиссады на приборе НПП показана на рис. 44.
Рис. 44. Индикация отклонения самолета от зоны глиссады
Измерение дальности в режиме ПОСАДКА
Измерение дальности в режиме ПОСАДКА производится так
же, как и измерение дальности в режиме НАВИГАЦИЯ, только
вместо радиомаяка РСБН-2Н (4Н, 6Н) работает ретранслятор
дальности аппаратуры ПРМГ-4. Дальность работы ретранслятора
– не менее 50 км при высоте полета 1000 м и не менее 180 км при
высоте полета 10 000 м.
12

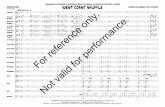
Бортовая аппаратура ближней навигации и посадки А-321
Рис. 45. Состав изделия А-321. Общий вид комплекта.
13

1 – самолетный запросчик дальномера А-312-002; 2 – азимутально-дальномерный приемник А-312-001; 3 – процессор сигналов А-321-011; 4 – блок памяти и контроля А-321-016; 5 – щиток управления ЩУ-01М; 6 – щиток переключения каналов ЩПК-М; 7 – указатель дальность ППД-2; 8 – рама амортизационная блока А-321-016; 9 – рама амортизационная А-321-006;10 – рама амортизационная А-321-031;
3

Аппаратура А-321 является частью навигационно-
пилотажного комплекса и решает при автоматическом,
полуавтоматическом и ручном режимах следующие задачи:
определение координат местоположения летательного
аппарата (ЛА) относительно наземного радиомаяка;
счисление координат местоположения ЛА по данным
автономной скорости и курса;
коррекция автономно счисленных координат по данным
радиомаяка;
формирование и выдача сигналов траекторного управления
ЛА в горизонтальной плоскости в режиме маршрутного
полета;
формирование и выдача сигналов траекторного управления
в горизонтальной плоскости и в вертикальной плоскости
в режиме возврата на один из четырех
запрограммированных аэродромов посадки с пробиванием
облачности, предпосадоч-ным маневром, выходом на
заданный курс посадки, автомати-ческим включением режима
посадки и выполнением повтор-ного захода правым или
левым кругом;
обеспечение возврата на незапрограммированный аэродром
в режиме СБРОС;
формирование и выдача сигналов управления самолетом по
курсу и глиссаде снижения в режиме ПОСАДКА.
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АППАРАТУРЫ А-321
Диапазон рабочих частот по каналу связи «Самолет – Земля»……………….726÷812,8 МГц по каналу связи «Земля – Самолет»…………..…..873÷1000,5 МГц Число частотно – кодовых каналов 176 Чувствительность приемного устройства,
14

В режиме НАВИГАЦИЯ по азимутальному каналу…………………………….. ≥ –130 дб/вт по дальномерному каналу……………………………...≥ –115 дб/вт В режиме ПОСАДКА по тракту курса………………………………………….≥ –110 дб/вт по тракту глиссады ……………………………………. ≥ –110 дб/вт Мощность излучения передающего устройства……………..≥ 400 Вт Погрешность определения полярных координат по сигналам наземного радиомаяка и индикации их на приборах ППД-2 и НПП: по азимутальному каналу…………………………………..± 3º
по дальномерному каналу…………………….± (0,2+0,0015Д) км Рабочая область в режиме автономного счисления
ортодромических координат………………………………….± 2560 км Погрешность определения ортодромических координат: по сигналам СВС……………………………..± (0,03S + 2t + 2) км по сигналам ДИСС, ИКВ…………………± (0,015S + 2t + 1,5) км Погрешность коррекции ортодромических координат
по радиоданным………………………………………± (0,015Д + 3) км Погрешность индикации расчетной дальности до цели
на приборе ППД-2 по ортодромическим координатам автономного вычислителя
для дальности до цели R1 £ 400 км…………….± (5 + 0,01 R1) км для дальности до цели R1 > 400 км…………….± (5 + 0,02 R1) км Погрешность формирования заданного курса для дальности до цели R1 < 40 км…………………… ± ( )º
для дальности до цели R1 ³ 40 км…………………..………± 3 º
Погрешность формирования сигнала отклонения от заданной высоты:
на крейсерской высоте полета…………………………….± 500 м на высоте предпосадочного маневра………………………± 30 м на высоте повторного захода……………………………….± 50 м Угол траектории наклона пробивания облачности 6 ± 1 º
Погрешность расчета выхода ЛА в створ ВПП для четырех запрограммированных аэродромов посадки на удалении 21 км……………………………………………….± 500 м Мощность, потребляемая аппаратурой, от сети: + 27 В…………………………………………………………230 Вт 36 В 400 Гц трехфазной……………………………………..130 ВА 115 В 400 Гц однофазной………………………………… ..220 ВА Масса аппаратуры………………………………………………….55 кг
Общие сведения о системах координат , применяемых в А-321
15

Решение перечисленных задач выполняется системой А-321
как в ортодромической (условно-географической), прямоуголь-
ной, так и в полярной системе координат.
Ортодромическая система координат (рис. 46) образована
географическим меридианом – ось Х и условно-географическим
экватором – ось Y , проходящим через точку выбранного начала
координат и .
Положительное направление оси Х – направление на
географический север.
Положительное направление оси Y – направление на восток
по дуге большого круга.
Рис. 46. Ортодромическая система координат:
16

- ортодромическая система координат; - географическая система координат D - угол сходимости географического и ортодромического
меридианов.
В полярной системе координат: полюс наблюдения – место
установки радиомаяка; начало отсчета угла наблюдения –
направление на север из места установки радиомаяка.
Принцип работы
Полет по заданному маршруту
Полет по заданному маршруту с использованием аппаратуры
А-321 осуществляется курсовым способом. В этом режиме
производится вычисление заданного курса и дальности R1
текущих координат ЛА ( ) относительно точки цели ( )
по следующим зависимостям:
;
,
где - координаты цели; - текущие координаты
летательного аппарата; R - радиус Земли.
Счисление текущих координат осуществляется
интегрированием составляющих скорости самолета VX и V Y в
ортодромической системе координат Х и Y :
где - начальные координаты самолета в момент начала
счисления; VX ,VY - составляющие скорости.
17

Составляющие VX и VY вычисляются в результате разложения
вектора скорости (путевой или воздушной) по ортодромическим
осям Х и Y в зависимости от текущего курса самолета.
Полярные координаты определяются как с помощью
радиосредств, так и рассчитываются автономно.
При наличии устойчивой радиосвязи с наземным маяком
РСБН по измеренным значениям азимута и дальности
производится коррекция ортодромических координат,
вычисленных по данным автономной скорости и курса самолета.
По текущим координатам и координатам
запрограммированного радиомаяка , относительно
которого производится коррекция, вычисляются автономные
значения азимута и дальности по следующим
зависимостям:
где - координаты запрограммированного аэродрома;
D - угол сходимости меридианов.
Далее производится определение ошибок между
вычисленными и измеренными значениями азимута и дальности
и их преобразование в составляющие DХ и DY .
Величины ошибок подаются в интеграторы текущих
координат , изменяя их значение таким образом, что
ошибки сводятся к нулю, т.е. производится их коррекция.
Возврат и посадка на один из четырех запрограммированных
аэродромов
Для возврата на запрограммированный аэродром на ЩУ
нажимается кнопка с номером этого аэродрома и кнопка
ВОЗВРАТ.
18

При расстоянии до запрограммированного аэродрома
посадки более 250 км возврат на него до дальности 250 км
аналогичен полету по маршруту, когда координатами цели
являются координаты аэродрома посадки.
При удалении от радиомаяка менее чем на 250 км и наличии
устойчивой связи с радиомаяком формируется команда
ВОЗВРАТ РАДИЙНЫЙ, по которой аппаратура вырабатывает
сигналы управления самолетом в продольном (горизонтальном)
канале и боковом (вертикальном) канале DН вплоть до входа
в зону действия посадочных маяков.
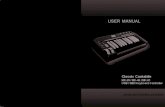
Траектория полета самолета в горизонтальной плоскости
показана на рис. 47.
Рис. 47. Траектория маневра в горизонтальной плоскости в режиме ВОЗВРАТ РАДИЙНЫЙ
19

Траектория строится в системе координат ВПП, в которой
положительное направление оси Х – направление по курсу
посадки, а положительное направление оси Z –
перпендикулярно оси Х, вправо по курсу посадки.
При полете в зоне возврата в зависимости от координат
самолета относительно аэродрома выбирается одна из трех
точек цели:
точка 1 с координатами ; точка 2 с координатами точка 3 с координатами ,где Х 1 = (21 ± 2) км – посадочная дистанция, км –
максимальный радиус разворота самолета при ограниченном
крене.
Режим возврата условно делится на шесть этапов полета –
:
e 1 – построение заданного курса на точку 1 или 3 , при этом
удаление самолета от этих точек должно быть не менее чем
радиус разворота ; это этап захода на посадку «с обратного
курса»;
e 2 – построение заданного курса на точку 2; это этап захода
«с прямой» или «третий разворот» при заходе с обратного
курса;
e 3 – построение заданного курса на точку с координатами
, где 2,5 км – дистанция упреждения; это этап
«предпосадочный маневр».
e 4 – построение заданного курса на точку с координатами
; это этап «посадка», продолжающий этап e 3 ; в
начале этапа вырабатывается сигнал ПОСАДКА.
e 6 – построение заданного курса на точку с
координатами ; это этап «повторный заход»,
20

который включается с пульта управления САУ кнопкой
ПОВТОРНЫЙ ЗАХОД при условии .
е 5 – этап «готовность курса», формируемый из сигналов
этапа e 4 и сигнала ГОТОВНОСТЬ КУРСА, поступающего из
приемного устройства А-312-001 в режиме ПОСАДКА.
При значении текущих координат самолета и
заданный курс строится в точку 1 (этап e 1). При подлете к точке
1 на расстояние (рис. 47, точка а) выдается команда на
изменение точки цели. Этап полета меняется на e 2 , точкой цели
становится точка 2 . Для рассматриваемого случая в этот момент
произойдет скачок заданного курса – начнется «третий
разворот» летательного аппарата. При подлете к 11-
километровому коридору (рис. 47, точка б) в устройстве
слежения блока А-321-011 формируется сигнал
ПРЕДПОСАДОЧНЫЙ МАНЕВР, и точка цели, расположенная до
этого в точке 2 , начинает перемещаться по оси посадки с
упреждением на 2,5 км. Ее координаты становятся
. Происходит полет по так
называемой «кривой погони», или «четвертый разворот».
При входе в 3-километровый коридор (рис. 47, точка в)
в блоке А-321-011 вырабатывается сигнал ПОСАДКА, по
которо-му происходит автоматическое переключение приемного
устрой-ства А-312-001 на частоту посадочных радиомаяков.
В этом случае координаты цели . После
прихода из приемного устройства сигнала ГОТОВНОСТЬ
КУРСА, подтверждающего переход аппаратуры А-321 из режима
навигации в режим посадки, изделие А-321 выдает сигнал
, где - запрограммированный курс посадки (этап е 5).
При полете из точки с координатами ХТ З и ZТ З (заход на
посадку почти с прямой) при входе в 11-километровый коридор
21

происходит скачок заданного курса в сторону от ВПП с
последующим вписыванием в плоскость, совпадающую с осью
ВПП. Это объясняется логикой захода на посадку, описанную
ранее.
При невозможности произвести посадку самолета по тем
или иным причинам летчик может включить на пульте САУ
режим ПОВТОРНЫЙ ЗАХОД, выбрав на щитке управления А-
321 сторону повторного захода – левый или правый круг.
Режим ПОВТОРНЫЙ ЗАХОД включится только в том
случае, если текущая дальность до ВПП ХТ > –X 1 + R 0 , т.е.
самолет находится не дальше 17 км от торца ВПП. При этом
заданный курс строится на точку с координатами
(рис. 47, точка д) и происходит разворот
самолета по кривой погони на точки 1 или 3 (совмещенный
«первый и второй разворот»). При увеличении дальности до
величины –X 1 + R 0 этап e 6 изменяется на e 2 .
Траектория управления полетом в режиме ВОЗВРАТ
РАДИЙНЫЙ в вертикальной плоскости показана на рис. 48.
Н Q пред
H пред
DН (Нзад – Нт)
Нт
Н0 пред Нзад Н крейс Q
H0
Д,км
Рис. 48. Траектория полета самолета в вертикальной плоскости в режиме
22

ВОЗВРАТ РАДИЙНЫЙ
Траектория полета представляет собой ломаную линию,
состоящую из трех участков:
участка крейсерской высоты Н к р е й с – от дальности до
радиомаяка 250 км до начала пробивания облачности вниз.
Переключение осуществляется по логической команде Е (см.
рис. 47) в зависимости от расстояния R´ от самолета до зоны
предпосадочного маневра;
участка пробивания облачности – движения самолета по
траектории снижения с заданным углом Q , равным 6 ± 1 ° ;
участка высоты предпосадочного маневра (стабильной в
пределах зоны предпосадочного маневра) Н 0 = 630 ±30 м.
Управление по высоте осуществляется по сигналу DН
(напряжение постоянного тока, пропорциональное разнице
между заданной и текущей высотой с крутизной сигнала
7В/1км), вырабатываемой в блоке А-321-011.
На этапах е3 «предпосадочный маневр», е4 «посадка», е5
«готовность курса» и е6 «повторный заход» заданная высота
равна высоте предпосадочного маневра 630 ±30 м.
На этапах ВОЗВРАТ РАДИЙНЫЙ до начала пробивания
облачности величина заданной высоты ограничивается крейсер-
ской высотой, индивидуальной для каждого типа самолета.
На этапах снижения по кривой пробивания облачности
заданная величина высоты является масштабным отражением
удаления самолета от границы кардиоиды, которая обеспечивает
заданный угол снижения 6 ± 1 ° .
Описание горизонтального маневра справедливо только для
случая так называемой разрешенной высоты. Разрешенной
23

является высота, не превышающая крейсерскую высоту, при
которой для выполнения снижения по кривой пробивания
облачности расчетный угол снижения не превышает предельно
допустимый угол снижения, равный 8 ° .
В случае неразрешенной высоты при текущей высоте
большей предельно допустимой (Н т >Hп р е д) происходит
автоматическое смещение цели по оси Х в точку с координатой
(рис. 47). При этом величина выноса ХВ обеспечивает
выполнение граничного условия: где
Н 0 п р е д=1400±200 м – предельная высота предпосадочного
маневра, при которой возможно вписывание на курс посадки и
посадка.
Значение R´ в данном случае определяется относительно
смещенной цели.
Выполнение инструментальной посадки по радиомаякам
курсоглиссадной группы производится по команде ПОСАДКА
при нахождении самолета в створе ВПП.
Работа посадочных маяков основана на методе создания
равносигнальных зон курса посадки и глиссады планирования.
Принцип формирования курса посадки и глиссады планирования
приведены на рис. 49, 50.
Инструментальная посадка осуществляется путем опреде-
ления на борту самолета его отклонений от равносигнальных
зон курса e к и глиссады e г и сведения значений этих
отклонений до нуля.
24

Рис. 49. Формирование равносигнальной зоны курса
Рис. 50. Формирование равносигнальной зоны глиссады
25

26