第 3 章 模拟式控制器
44
EXIT 第 1第 第第第第第第第第第第第 第第第第 第第第 第第第第第第第第第第第第第 、、 第第第第第第第第第第第第第第第第第第 第第 DDZ-Ⅲ 第第第第第第第第第 第第 DDZ-Ⅲ 第第第第第第第第第第第 第第 DDZ-Ⅲ 第第第第第第第第第第第 第第第第第第第第第第第第第第第 第第第第第第第第第第第第第 第第第第第第第第第第第第第第第第第第第第 / 第第第第 第3第 第第第第第第 第第第第 第第第第
description
了解控制器的种类及发展 理解比例、微分、积分三种基本控制规律的特点 掌握工程常用控制规律的特点及应用场合 了解 DDZ-Ⅲ 型控制器的主要功能 掌握 DDZ-Ⅲ 型基型控制器的构成原理 理解 DDZ-Ⅲ 型基型控制器的实现电路. 第 3 章 模拟式控制器. 知识目标. 技能目标. 能够应用所学知识正确使用控制器 能够对控制器进行正确的调校 能够在三种运行方式下操作控制器并进行手动 / 自动切换. 第 3 章 模拟式 控制器. 3.1 控制器的控制规律. 3.2 DDZ-Ⅲ 型控制器. 3.3 基型控制器的运行方式. 3.4 基型控制器的操作. - PowerPoint PPT Presentation
Transcript of 第 3 章 模拟式控制器

EXIT 第 1页
了解控制器的种类及发展理解比例、微分、积分三种基本控制规律的特点掌握工程常用控制规律的特点及应用场合了解 DDZ-Ⅲ 型控制器的主要功能掌握 DDZ-Ⅲ 型基型控制器的构成原理理解 DDZ-Ⅲ 型基型控制器的实现电路
能够应用所学知识正确使用控制器能够对控制器进行正确的调校能够在三种运行方式下操作控制器并进行手动 / 自动切换
第 3 章 模拟式控制器知识目标
技能目标

EXIT 第 2页
第 3 章 模拟式控制器3.1 控制器的控制规律
3.4 基型控制器的操作
3.2 DDZ-Ⅲ型控制器3.3 基型控制器的运行方式

EXIT 第 3页
一、概述1 、控制器的运算规律 概念 : y=f(ε) 2 、偏差的概念: ε=xi-xs 定值系统: Δxi=Δε3 、控制器的正、反作用: xi↑→ε↑→y↑;ε > 0, Δy > 0→ 正作用 反之亦然。4 、控制器的基本运算规律:双位、 P 、 I 、 D 规律 控制器的组合运算规律: P I 、 P D 、 PID 规律
3.1 控制器的控制规律

EXIT 第 4页
( 一 ) P 控制规律1 、 P 控制规律定义: P 控制器的输出变化量 ΔY 与输入偏 差、 ε 之间成比例的关系。 ΔY=Kp·ε2 、阶跃响应曲线:3 、比例度 δ 的概念:
单元组合式仪表 :δ 用来表示 P 作用的强弱, δ↑→P 作用↓
%100
max
max
yy
%1001
PK
0 t0 t
ε
0 t0 t
y
二、 控制器的控制规律

EXIT 第 5页
比例控制 规律及控制器 示意图:
ε
比例控制器KP
ε
△y
△y
+ ε- ε 0
KP <1
KP >1xi ε=xi - xs
-
△y
设定值
控制器输出偏差I0
4~20 mA
控制器△y
xs测量值
KP =1

EXIT 第 6页
(二) I 、 PI 规律1. I 控制规律定义:
dtT
yt
I0
1
2.PI 控制器的 y 与 ε 的关系:
dtT
Kyt
IP
0
1
3. 阶跃响应曲线: ε=A 常数 则:
AtT
AKyI
P1
4. 积分时间 Ti 的定义及测试 Ti 的依据5. 控制点、控制点偏差与控制精度的概念
控制器的输出变化量 Δy 与输入偏差 ε 之间成积分的关系。

EXIT 第 7页
2. 比例积分作用 PI
)1(1 dt
Ty
i
0 t0t
0 t0 t
I
0 t0 t
PI
Ti
积分作用的依据是偏差对时间的累积, 作用是消除余差。
ε
△y △y
0 t0t
εA A

EXIT 第 8页
积分控制规律
ε: 为阶跃信号时积分是偏差对 时间的累积 :ε=0 时输出不变或称积分保持
ε
t
t
△y
Ti
0
0
PI

EXIT 第 9页
比例 - 积分规律ε : 为阶跃信号时
ε
t
t
△y P
t
△y I
+ =
△y PI
t

EXIT 第 10页
(三) D 、 PD 规律ε : 为阶跃信号时
ε
t
△PP
t t
△PD
+ =
△PPD
TD

EXIT 第 11页
( 四) PID 三作用控制规律 ε : 为阶跃信号时
ε
t
△PP
t
t
△PD
+
=
△PPID
TDt
△PI
+
t
t

EXIT 第 12页
比例、积分、微分三作用规律:)1(1
dtdeTedt
Tep d
i
0 t0t
ε
0 t0 t
p
0 t0 t
I0 t0 t
PID
Ti
0 t0 t
D( 1-1/ε ) =63%
Td

EXIT 第 13页
三、Ⅲ型控制器的功能实现
一、Ⅲ型控制器的功能
3.2 DDZ-Ⅲ 型控制器
二、Ⅲ型控制器的构成

EXIT 第 14页
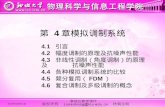
指示单元:测量信号 Vi 指示电路及显示表 : 显示 Vi 的大小 给定信号 Vs 指示电路及显示表 : 显示 Vs 的大小控制单元:输入电路:偏差运算、电平移动 V01= - 2(Vi -Vs) PD 电路:对 V01 进行 PD 运算 PI 电路:对 V02 信号进行 PI 运算 输出电路 : 电压 V03— 电流 I0 的转换、电平移动附加:内给定电路 : 提供 Vs 内 软手操电路 : 提供 VR 硬手操电路 : 提供 VH控制器有四种工作状态: A 、 M 、 H 、保持特性:
dt
dTdtT
KI D
t
IP
0
01
一、Ⅲ型控制器的功能

EXIT 第 15页
测量指示电路
%Vi %Vs
输入电路 比例微分电路 比例积分电路 输出电路
给定电路 软手操电路电路 硬手操电路电路M
H
H
Vi
VH
ε
1 ~ 5 V
V01 V02 V03
M
AI0
4 ~ 20 mA
4 ~ 20 mA
1 ~ 5 V
给定指示电路
输出指示-
测量指示 给定指示
%I0
Vs
K1
IS
VR
VS 内VS 外内给定外给定
A :自动控制
K5
软手操 硬手操
指示单元 控制单元
附加电路 :手动遥控
测量输入
外给定输入
输出电流
给定信号
3 V DC测量 标定K6主电路 : PID 运算
PD 运算 PI 运算
二、Ⅲ型控制器的构成

EXIT 第 16页
控制电路(一)输入电路
V01=-2 ( Vi-Vs ) = -2ε(二)比例微分 PD 电路 对△ V01 进行 PD 运算(三)比例积分 PI 电路 对 ΔV02 进行 PI 运算 (四)输出电路(五)整机特性分析
)(1
1)( 0120 sVSTn
sVKDTSD
02103 1
1)( V
CC
sVSTA
STt
M
T
II
I
030 2501 VI
ST
STKSW D
IP
11)(
三、Ⅲ型控制器的功能实现

EXIT 第 17页
(一)输入电路简单减法电路及存在的问题
001
RVV
KRVV FiF
)(01 iS VVKV
设 K=2, 则有)(2)(201 SiiS VVVVV
i
i
供电电源回路在导线电阻 RCM上产生电压降 VCM,使得输入控制器的测量信号不只是 V ,而是 V+VCM 。引线电阻 RCM 上的压降 VCM 就要引起较大的测量误差。这个误差的大小与引线长度、粗细及环境温度有关。

EXIT 第 18页
SFT VKKVV
1
VVVV FT 3.367.0)51(32
由于 +24V 单电源供电,使一般减法电路中的运算放大器输入端电压有可能超出允许的共模电压范围而不能正常工作。
式中 VS 的取值范围为 1~5V ,系数 K 取 2 ,则可算出IC1 的输入端电压范围
显然,当 VS 较小时,这样低的正反相输入端的共模电压,已经超出了运算放大器的共模电压范围而不能正常工作。 一般运算放大器,为确保其正常的工作状态都有共模电压范围的要求,在 24V 供电条件下,其共模电压允许范围为 2 ~ 19V 。
(一)输入电路

EXIT 第 19页
偏差差动电平移动输入电路(一)输入电路
021
5
01
4
21
1
R
VVV
RVV
RVVV FB
FCMFCMi
设 R1= R2= R3= R4= R5= R=500K
R7= R8=5K
IC1 为理想运算放大器,则流入IC1 反相输入端的电流近似的为零。即
)21(
31
0121 VVVVVV BCMCMiF
)(31
21 BCMCMST VVVVV 同理: )(2)(201 Siis VVVVV

EXIT 第 20页
1. 作用: (1) 将 Vi 与 Vs 进行减运算,并放大 2 倍, V01=-2 ( Vi-Vs ) (2) 进行电平移动 (3) 消除引线电阻上压降的影响2. 为什么要进行电平移动 为了使运放器 IC1 工作在允许的共模输入电压范围之内。3. 为什么要采用差动输入电路 为了消除集中供电引线电阻压降引入的误差4. 输入电路的特性: V01= - 2(Vi -Vs) = - KP(Vi -Vs) = - KPε G1(S )= - KP= -2
(一)输入电路

EXIT 第 21页
(二)比例微分 PD 电路比例微分运算电路原理如图所示,它的作用是接受由输入电路送来的以 10V电平为基准的输出信号 V01 ,对 V01 进行比例微分运算,再经比例放大的后输出 V02 信号,送给比例积分电路。
RP为比例电位器, RD为微分电位器, CD为微分电容。控制 RD可以改变微分时间 TD,控制 RP可以改变比例度。开关 K2用来切除或引入微分作用,当开关 K2置于“通”的位置,具有比例微分作用,当不需要微分作用时,开关 K2置于“断”的位置。

EXIT 第 22页
在这个过程中 VT 下降速度取决于 RD、 CD的大小,即取决于微分作用的强弱,
分析 PD 作用的物理过程: 当开关 K2置于“通”的位置时,若在电路输入端加一正阶跃输入信号 V01,在开始加入信号的瞬间( t=0),由于电容 CD上的电压 VCD不能突变,输入信号全部加到了 IC2的同相输入端 T 点,使 T 点电压 VT一开始就有一跃变,其数值 VT=V01, 随着电容器 CD充电过程的进行,电容 CD两端电压 VCD从零伏起按指数规律不断上升,所以 VT 按指数规律不断下降。 当充电时间足够长时,被充电的电容 CD上的电压 VCD等于输入电压 V01在 R9电阻上的分压,充电停止,此时,并保持该值不变。

EXIT 第 23页
0102 )0()0( aVaVV T
nVaaVV T
0102 )()(
输入信号 V01 为阶跃信号时, V02 的变化曲线形状与 VT 变化曲线完全一样。
,
。

EXIT 第 24页
1. 作用: (1) 对 V01 进行 PD 运算, V02 送至 PI 电路, (2) 实现 δ 、 Td 的调整2. 定性分析工作原理: 无源微分电路:
比例运算放大: 定量分析:
)(1
11)( 01 SVTSST
nsV D
T
)()(02 SVSV T
)(1
1)( 0120 sVSTn
sVKDTSD
(二)比例微分 PD 电路

EXIT 第 25页
(三)比例积分 PI 电路 比例积分电路接收比例微分电路输出的以 10V为基准的电压信号
V02 ,进行比例积分运算以后,输出以 10V电平为基准的 1-5VDC电压 V03送至输出电路。该电路由运算放大器 IC3,电阻 RI ,电容CM 、 CI 等组成。
由于射极跟随器的输出信号与 IC3输出信号同相位,为便于分析,可把射极跟随器包括在 IC3中,于是PI电路可简化成图示电路。
K3为积分换挡开关。积分时间有“乘 1”与“乘 10”两挡,由开关 K3选择。当 K3置于“乘 10”挡时,积分时间是刻度值的 10倍。 IC3输出接电阻和二极管,然后通过射极跟随器输出。

EXIT 第 26页
STK
STK
sVsV
sG pPI
11
1
02
03
11
11
)()(
)(
M
IP CC
K
II CmRT I
I
MI C
CmA
K 3
设运算放大器 IC3 的放大倍数为 A3 ,输入电阻 Ri→∞晶体管射极跟随器的电压增益为 1 ,则有:
式中 Kp- 比例积分电路的比例增益,TI- 积分时间,KI- 积分增益,
)1()()(
)(1
1
02
03STpPI K
sVsV
sG
运算放大器 IC3 的放大倍数 A3 很大,可近似为理想比例积分电路的传递函数:

EXIT 第 27页
021
03111 VeKK
CC
V TKt
IIM
0203 0 VCC
VM
I
0203 VKCCV IM
I
021
03 2 VCC
VM
当输入信号作阶跃度变化时,通过对上式进行反拉氏变换可得到
t=0时, t=∞ 时,
t=TI 时, 输出 V03的阶跃响应曲线
由于运算放大器 IC3 的放大倍数 A3 为有限值,因此积分增益 KI 也是有限值。比例积分电路的最大输出电压是有限的。

EXIT 第 28页
1. 作用:(1) 对 ΔV02 进行 PI 运算(2) 实现 Ti 的调整2. 电路分析:理想特性:
实际特性:
)()1()( 0203 SVCmRt
CC
SVIIM
T
)()1()( 0203 sVSTt
CC
sVIM
T
02103 1
1)( V
CC
sVSTA
STt
M
T
II
I
(三)比例积分 PI 电路

EXIT 第 29页
(四)输出电路1 .作用:① V03→I0 ② 电平移动
030 2501 VI

EXIT 第 30页
(五)整机特性分析
SKT
STK
SFT
FSTFK
SSV
SW
D
D
II
D
IP 11
11
)()(
)( 03
I
D
TT
F 1
M
IP nC
CK
2
III CmRT
DDD CnRT
nKD
控制器的整机线路分析II KA
ST
STKSW D
IP
11)(S
SFKsW
D
D
IIIID
D
I
KT
STKTKK
FT
SFTp
11
1
1
1)(

EXIT 第 31页
DDZ—Ⅲ 型控制器有自动 (A)、软手动 (M)和硬手动 (H)三种工作状态,并通过联动开关进行切换。 在自动运行方式下,是以控制器的输出指挥执行器,因而执行器输出轴的转角同控制器的输出电流是相对应的。一般执行器输出轴的转角从 0º 到 90º变化时,所对应的控制器输出电流为 4 ~ 20mA·DC。 只要被控量的偏差为零时就可以从手动切换为自动。 在自动运行时,控制器的手动输出信号,一般都不能自动地跟踪自动输出信号,因此,由自动切换到手动前,必须将手操拨盘的刻度拨到与自动输出信号相对应的值上,然后由自动切换到手动,方能达到无扰动切换。
3.3 基型控制器的运行方式一、自动运行方式

EXIT 第 32页
控制器的手动操作功能是必不可少的。在自动控制系统投入运行时,往往先进行手动操作,来改变控制器的输出信号,待系统基本稳定后再切换至自动运行。系统出现某种故障、设备启停或控制器的自动部分失灵,也必须切换到手动操作。
二、手动运行方式3.3 基型控制器的运行方式

EXIT 第 33页
(1) 软手动操作电路 当切换开关 K1 ,置于“ M”位置时,为软手动操作状态,又称速度式手操,是指控制器的输出电流随手动输入电压成积分关系而变化。 (2) 硬手动操作电路 当切换开关 K1 ,置于“H”位置时,为硬手动操作状态,又称比例式手操,是指控制器的输出电流随手动输入电压成比例关系而变化。

EXIT 第 34页
三、手动自动无扰动切换(1)无平衡无扰动切换 所谓无平衡切换,是指在自动、手动切换时,不需要事先调平衡,可以随时切换至所需要位置。所谓无扰动切换是指在切换时控制器的输出不发生变化,对生产过程无扰动。 Ⅲ 型控制器由自动或硬手动向软手动的切换以及由软手动或硬手动向自动的切换均为无平衡无扰动的切换方式。(2)有平衡无扰动的切换 凡是向硬手动方向的切换,从自动到硬手动或从软手动到硬手动,均为有平衡的无扰动切换。即要做到无扰动切换,必须事先平衡。

EXIT 第 35页
自动 (A)→ 软手动 (M) 硬手动 (H) → 软手动 (M) 为无平衡无扰动切换 A3 处于保持工作状态, U03 保持不变 软手动→自动硬手动→ 自动 为无平衡无扰动切换
UCI=U02 , UF3=0 ,电容没有充放电现象 自动→硬手动 软手动→硬手动 须进行预平衡操作
DDZ—Ⅲ 型控制器的切换过程可描述如下 :三、手动自动无扰动切换

EXIT 第 36页
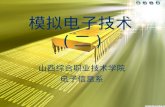
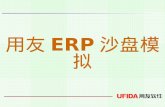
(一)Ⅲ型控制器内外特性
1. 正面板 2. 侧面板3. 背后接线端子4. 整机线路初读
3.4 基型控制器的操作

EXIT 第 37页
Ⅲ 型控制器的外特性

EXIT 第 38页
Ⅲ型控制器的外特性

EXIT 第 39页
PID 运算规律 1. 理想 PID 运算规律 :
dt
dTdtT
Ky D
t
IP
0
1
传递函数 :
ST
STKSW D
IP
11)(
2. 实际 PID 规律 :
Tt
DTKt
DP eFKeFKKy II 1
传递函数:
SKT
STK
SFT
FSTFKSW
D
D
II
D
IP 11
11)(
I
D
TT
F 1
3. 特性曲线
小结

EXIT 第 40页
整机特性分析
控制器的整机线路分析S
SFKsW
D
D
IIIID
D
D
I
KT
STKTKK
KT
SFTp
11
1
11
)(
dt
dTdtT
Ky D
t
IP
0
1
ST
STKSW D
IP
11)(
当 KI=∞ TI=∞ TD= 0 F=1 KD=∞ 时实际特性:
理想特性:
小结

EXIT 第 41页
控制器的线路分析控制电路(一)输入电路 ε ( Vi-Vs) →△ V01(二)比例微分 PD电路 △ V01→△V02(三)比例积分 PI电路 △ V02 →△V03 (四)输出电路△ V03 →△
I0(五)整机特性分析 ε ( Vi-Vs )→△ I0(六)手动操作电路1.软手动操作电路:2.硬手操电路:
小结
HVV 03
tVT
tVCR
V RRMM
11
03

EXIT 第 42页
基型节器的基本组成方框图及工作原理
测量指示电路
%Vi %Vs
输入电路 比例微分电路 比例积分电路 输出电路
给定电路 软手操电路电路 硬手操电路电路M
H
H
Vi
VH
ε
1 ~ 5 V
V01 V02 V03
M
AI0
4 ~ 20 mA
4 ~ 20 mA
1 ~ 5 V
给定指示电路
输出指示-
测量指示 给定指示
%I0
Vs
K1
IS
VR
VS 内VS 外内给定外给定
A :自动控制
K5
软手操 硬手操
指示单元 控制单元
附加电路 :手动遥控
测量输入
外给定输入
输出电流
给定信号
3 V DC测量 标定K6主电路 : PID 运算
PD 运算 PI 运算
小结

EXIT 第 43页
1. 工业上常用控制器的控制规律有哪几种?2. 在模拟控制器中,一般采用什么方式实现各种控制规律?3. 试述 DDZ-Ⅲ 型控制器的功能。4. 基型控制器由哪几组成?各部分的主要作用是什么?5. DDZ-Ⅲ 型控制器的输入电路为什么要采用差动输入方式?为什么要进行电平移动?6. DDZ-Ⅲ 型控制器有哪几种工作状态?什么是软手动状态和硬手动状态?7. 什么是控制器的无扰动切换? DDZ-Ⅲ 型控制器如何实现“手动 / 自动”无扰动切换?为什么从软手动方式向硬手动方式切换需要事先平衡?

EXIT 第 44页
谢谢大家!再见!