第 3 章 异步电机变频调速控制方式
43
Click here to load reader
description
第 3 章 异步电机变频调速控制方式. 主讲人:冯晓云 教授 Email: f [email protected] 西南交通大学电气工程学院 列车控制与牵引传动研究室. 本章主要内容. 频率调节时异步电机的等值电路 恒磁通控制 恒电压频率比控制 恒转子全磁通控制 恒功率控制 列车牵引中变频调速系统的调节特性 谐波分析. T m. T. T st. fs(s=0). fs(Hz). 回顾:交流异步电机矩速特性. 回顾:交流异步电机矩速特性. 回顾:异步电机等值电路. 3.1 变频调速时异步电机的等值电路. - PowerPoint PPT Presentation
Transcript of 第 3 章 异步电机变频调速控制方式

2
《电力牵引交流传动控制系统》
本章主要内容本章主要内容本章主要内容本章主要内容
频率调节时异步电机的等值电路
恒磁通控制
恒电压频率比控制
恒转子全磁通控制
恒功率控制列车牵引中变频调速系统的调节特性谐波分析

3
《电力牵引交流传动控制系统》
回顾:交流异步电机矩速特性回顾:交流异步电机矩速特性回顾:交流异步电机矩速特性回顾:交流异步电机矩速特性
Tm
T
Tst
fs(s=0) fs(Hz)

4
《电力牵引交流传动控制系统》
回顾:交流异步电机矩速特性回顾:交流异步电机矩速特性回顾:交流异步电机矩速特性回顾:交流异步电机矩速特性
rrmM
p
s
ICT
sn
fn
cos
)1(60
cose g r rP mE I

5
《电力牵引交流传动控制系统》
回顾:异步电机等值电路回顾:异步电机等值电路回顾:异步电机等值电路回顾:异步电机等值电路
lrX
/rR s
mX
sR lsX
sUgE
sI rI
Equivalent circuit of induction motor
mI rE
lsNXlrNX
mNX

6
《电力牵引交流传动控制系统》
3.1 3.1 变频调速时异步电机的等值电路变频调速时异步电机的等值电路3.1 3.1 变频调速时异步电机的等值电路变频调速时异步电机的等值电路
lrX
/rR s
mX
sR lsX
sUgE
sI rI
Equivalent circuit of induction motor
mI rE

7
《电力牵引交流传动控制系统》
变频调速时异步电机参数的变化变频调速时异步电机参数的变化变频调速时异步电机参数的变化变频调速时异步电机参数的变化
4.44g s Ns s m E s mE N k f C f
gm
E s
E
C f
sE
sm fC
U
sls lsN f lsN
sN
fX X X
f
slr lrN f lrN
sN
fX X X
f
sm mN f mN
sN
fX X X
f
1.5 1.5( )f
sm mN mN
sN
fR R R
f

8
《电力牵引交流传动控制系统》
转矩公式转矩公式转矩公式转矩公式
cose g r rP mE I
cos2
peg r r
s s
mnPT E I
f
cosM m r rT C I
2 /2
pr r
s
mnT I R s
f
2
2 2
/
2( ) ( )
p s r
rss ls lr
mn U R sT
RfR X X
s
电磁功率:
电磁转矩:

9
《电力牵引交流传动控制系统》
同步角速度
转子电流
转子功率因数
2 ss
p
f
n
2( )
gr
rlr
EI
RX
s
2 2
/cos
( )
rr
rlr
R s
RX
s

10
《电力牵引交流传动控制系统》
变频调速时异步电机的转矩公式变频调速时异步电机的转矩公式变频调速时异步电机的转矩公式变频调速时异步电机的转矩公式
2
2 222p s s r
s s r ls lr
mn U sf RT
f sR R s X X
2
2 22 (2 )
p g sl r
s r sl lr
mn E f RT
f R f L
2
2p slr
s r
mn fET
f R

11
《电力牵引交流传动控制系统》
3.2 3.2 恒磁通控制恒磁通控制3.2 3.2 恒磁通控制恒磁通控制
2
2 22 (2 )
p g sl r
s r sl lr
mn E f RT
f R f L
2r
mlr
Rf
L
21
2 4p g
ms lr
n m ET
f L
)/()/(
2
slmmslm ffffT
T

12
《电力牵引交流传动控制系统》
结论:当 g
s
Econst
f
T
constf
constT
ffT sl
max
max
)( constTconstf sl ,
3.2 3.2 恒磁通控制恒磁通控制3.2 3.2 恒磁通控制恒磁通控制

13
《电力牵引交流传动控制系统》
3.3 3.3 恒压频比控制恒压频比控制3.3 3.3 恒压频比控制恒压频比控制
0sldf
dT
2
2 24 [2 ( )]
p s sm
s s s s ls lr
mn U fT
f R R f L L
2
2 22 2 ( )
p s s rst
s s r s ls lr
mn U f RT
f R R f L L
2
2 222p s s r
s s r ls lr
mn U sf RT
f sR R s X X
2 2[2 ( )]
rm
s s ls lr
Rs
R f L L

14
《电力牵引交流传动控制系统》
结论:
constfU ss /
)(
),(
)(
max s
sls
sm
ffT
fffT
fff
3.3 3.3 恒压频比控制恒压频比控制

15
《电力牵引交流传动控制系统》
恒压频比时最大转矩和起动转矩与频率的关系曲线
3.3 3.3 恒压频比控制恒压频比控制

16
《电力牵引交流传动控制系统》
低频时,恒电压频率比控制方式受定子电阻压降的影响较大而不能保持气隙磁通不变,其最大力矩和起动力矩都急剧下降,限制了传动系统的带负载能力。
解决方法:在低频范围内提高逆变器的输出电压以补偿定子压降下降的影响。
恒压频比控制带来的问题3.3 3.3 恒压频比控制恒压频比控制

17
《电力牵引交流传动控制系统》
3.4 3.4 恒转子全磁通恒转子全磁通
a
b
c
n
T
0
4.44r s s Ns rmE f N k
a -恒电压频率比控制 b -恒磁通控制
c -恒转子全磁通控制
r
s
Econst
f

18
《电力牵引交流传动控制系统》
3.5 3.5 恒功率运行方式恒功率运行方式3.5 3.5 恒功率运行方式恒功率运行方式
引用前述转矩公式
基频以上时,转差率 s 很小, 与 相比可忽略,转矩公式可以写为
2
222
p g r
rslr
mn E RT
RfsX
s
rlr
RX
s
lrX rRs
2
22p g
slr s
mn ET f
R f

19
《电力牵引交流传动控制系统》
恒功率运行方式恒功率运行方式恒功率运行方式恒功率运行方式
因为高频时, 所以
为使电机恒功率运行,等号的右边说明电压和频率的调节方式有两种
一) Us不变, 的调节方式
g sE U2
2p s
slr s
mn UT f
R f
2s
slr s
UmP T f
R f
sl
s
fs constf

20
《电力牵引交流传动控制系统》
UUss 不变,不变, s=consts=const 恒功率调节恒功率调节UUss 不变,不变, s=consts=const 恒功率调节恒功率调节
max 2
1
1s
s
s
s
Tf
Tf
I const
U const
1 sf

21
《电力牵引交流传动控制系统》
该恒功调节方式属于恒电压调节,为保证电动机在全部恒功调速范围内能稳定运行,系统工作点选取为在最高转速时,保证有最低的过载能力,于是在恒功范围的低速点内,电机过载能力就出现了不必要的裕度。电动机有较大的设计尺寸,但逆变器在恒压恒流下工作,称为最大电动机和最小逆变器方案。
恒功率运行方式恒功率运行方式恒功率运行方式恒功率运行方式

22
《电力牵引交流传动控制系统》
恒功率运行方式恒功率运行方式恒功率运行方式恒功率运行方式
max
1
1
1
s
s
s s
s
s
Tf
Tf
U f
If
s sU f
1 sf
1 sf
1s sI f
mT
T
T
二) 不变, 的调节方式2s
s
U constf slf

23
《电力牵引交流传动控制系统》
这种恒功调节方式具有不变的过载系数,电机的设计工作点可以选择在恒功范围的最低转速时有最小允许的过载能力,这样在高速时仍然有适度的转矩裕量,使在整个恒功调速范围内稳定运行,并能充分地利用电机的功率,电机设计尺寸较小。
由调节特性图可知,逆变器在整个恒功范围内需要满足最高电压和最大电流的要求,因而有较大的设计容量和尺寸,该恒功运行方式称为最小电动机和最大逆变器方案。
恒功率运行方式恒功率运行方式恒功率运行方式恒功率运行方式

24
《电力牵引交流传动控制系统》
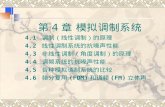
3.6 3.6 列车牵引中变频调速系统调节特性列车牵引中变频调速系统调节特性3.6 3.6 列车牵引中变频调速系统调节特性列车牵引中变频调速系统调节特性
sU
sI
slf
eT
fbf mcf
恒力矩区 恒功率区 自然特性区
gE

25
《电力牵引交流传动控制系统》
动车组牵引特性曲线动车组牵引特性曲线动车组牵引特性曲线动车组牵引特性曲线

26
《电力牵引交流传动控制系统》
3.7 3.7 谐波分析谐波分析3.7 3.7 谐波分析谐波分析
一、异步电机中的谐波磁势说明:这里讨论仅限于整数槽三相绕组情况电机谐波磁势可分为两类:• 时间谐波磁势• 空间谐波磁势

27
《电力牵引交流传动控制系统》
异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势
1. 时间谐波磁势5次谐波电流在电机的 A、 B、 C相绕组中建立的脉动磁势为: ~
1.5 1.5
~
1.5 1.5
~
1.5
sin 5 cos
2 2sin 5( )cos( )
3 32 2
sin(5 )cos( )3 3
A
B
f f t
f f t
f t

28
《电力牵引交流传动控制系统》
异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势
~
1.5 1.5
~
1.5
4 4sin 5( )cos( )
3 32 2
sin(5 )cos( )3 3
Cf f t
f t
~
1.5 5f
次谐波电流所产生的每相的空间磁势基波分量的幅值;
沿定子铁芯内圆从绕组轴线算起的电位移角;

29
《电力牵引交流传动控制系统》
异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势
利用三角关系 将上三式转化为:
将三式相加,得到电机三相绕组所产生的合成磁势
1 1sin cos sin( ) sin( )
2 2
~
1.5 1.5
~
1.5 1.5
~
1.5 1.5
1[sin(5 ) sin(5 )]
21 2
[sin(5 ) sin(5 )]2 31 2
[sin(5 ) sin(5 )]2 3
A
B
C
f f t t
f f t t
f f t t
~
1.5 1.5
3sin(5 )
2F f t

30
《电力牵引交流传动控制系统》
异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势
对于 7 次谐波电流在 A 、 B 、 C 相绕组中产生的脉动磁势的基波分量可表示为:
得到三相绕组合成磁动势:
~
1.7 1.7
~
1.7 1.7
~
1.7 1.7
sin 7 cos
2 2sin(7 )cos( )
3 32 2
sin(7 )cos( )3 3
A
B
C
f f t
f f t
f f t
~
1.7 1.7
3sin(7 )
2F f t

31
《电力牵引交流传动控制系统》
6 1 ( 0,1,2,3 )k n n 次谐波电流产生正向(基波转向)的旋转磁场,而 次谐波电流则产生反向的旋转磁场。
时间谐波磁势的转速总是 倍于基波磁势的同步转速
6 1k n
k

32
《电力牵引交流传动控制系统》
异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势
2. 空间谐波磁势基波电流在 A 、 B 、 C 各相绕组中所产生的 5 次空间谐波磁势可以写成:~
5.1 5.1
~
5.1 5.1
~
5.1
sin cos5
2 2sin( )cos5( )
3 32 2
sin( )cos(5 )3 3
A
B
f f t
f f t
f t

33
《电力牵引交流传动控制系统》
异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势
~
5.1 5.1
~
5.1
4 4sin( )cos5( )
3 32 2
sin( )cos(5 )3 3
Cf f t
f t
三相绕组的合成磁势为
5.1 5.1 5.1 5.1
~
5.1
3sin( 5 )
2
A B CF f f f
f t

34
《电力牵引交流传动控制系统》
异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势异步电机中的谐波磁势
绕组里的谐波电流也产生旋转的空间谐波磁动势如 5 次谐波在各相绕组中产生的 7 次空间谐波磁动势:
三相绕组的合成磁势为:
~
7.5 7.5
~
7.5 7.5
~
7.5 7.5
sin 5 cos7
2 2sin(5 )cos(7 )
3 32 2
sin(5 )cos(7 )3 3
A
B
C
f f t
f f t
f f t
~
7.5 7.5 7.5 7.5 7.5
3sin(5 7 )
2A B CF f f f f t

35
《电力牵引交流传动控制系统》
谐波分析谐波分析谐波分析谐波分析
二、异步电机中的谐波电流1. 谐波等值电路
mI
rI
/rR s
lrXlsXsR
mX
gE
sI
sU
mkI
rkI
/rk kR s
lrkXlskXskR
mkX
gkE
skI
skU
基波等值电路 谐波等值电路
谐波转差率 sk 的计算及其与基波转差率 s的关系1
1
( 1)k
kn n k ss
kn k

36
《电力牵引交流传动控制系统》
异步电机中的谐波电流异步电机中的谐波电流异步电机中的谐波电流异步电机中的谐波电流
2. 谐波电流
mkI
rkI
/r kR s
lrkXlskXsR
mkX
gkE
skI
skU
mkI
rkI
lrkXlskX
mkX
gkE
skI
skU
kI
kU
ls lrk X X不考虑集肤效应的等值电路 忽略 Rs 和 Rr 的等值电路
忽略激磁支路的近似等值电路
sk kU U
sk kI I

37
《电力牵引交流传动控制系统》
异步电机中的谐波电流异步电机中的谐波电流异步电机中的谐波电流异步电机中的谐波电流
K次谐波电流有效值:
如果电机的基波电流为 Is,则电机总的有效电流
为:
2 2 2 2 25 7 11 13( )
kk k
ls lr
UI I I I I I
k X X
2 2r s kI I I

38
《电力牵引交流传动控制系统》
谐波分析谐波分析谐波分析谐波分析
三、谐波转矩1. 稳定谐波转矩
由于
则
2
2p rk
k rks k
mn RT I
kf s
1k
ks
k
2
2 ( 1)p rk
k rks
mn RT I
kf k

39
《电力牵引交流传动控制系统》
谐波转矩谐波转矩谐波转矩谐波转矩
2. 振动谐波转矩5次谐波下,电机每相产生的转矩的瞬时值:
5 1 5
5 1 5
5 1 5
2 sin(5 ) 2 sin2
2 22 sin[(5 ) ] 2 sin( )
2 3 3
2 42 sin[(5 ) ] 2 sin( )
2 3 3
pA r r s
s
pB r r s
s
pC r r s
s
nT I t E t
f
nT I t E t
f
nT I t E t
f
5 5
0
r
s
r
I
E
t
转子 次谐波电流的归算值;
基波转子电势在气隙侧的归算值;
时以上电流和电势的相位差。

40
《电力牵引交流传动控制系统》
谐波转矩谐波转矩谐波转矩谐波转矩
利用三角关系将上三式化为:
5 1 5
5 1 5
5 1 5
T [cos(4 ) cos(6 )]2
4T [cos(4 ) cos(6 )]
2 3
2T [cos(4 ) cos(6 )]
2 3
pA r s r r
s
pB r s r r
s
pC r s r r
s
nI E t t
f
nI E t t
f
nI E t t
f

41
《电力牵引交流传动控制系统》
谐波转矩谐波转矩谐波转矩谐波转矩
三式相加得电机相应的谐波振动转矩(瞬时)值
7次谐波电流产生的谐波振动转矩(瞬时)值
5 1 5
5
3cos(6 )
2
3cos(6 )
2
pr s r
s
pr s r
s
nT I E t
f
nI E t
f
7 1 7
3cos(6 )
2p
r s rs
nT I E t
f

42
《电力牵引交流传动控制系统》
本章小结本章小结本章小结本章小结变频调速时异步电机的基本原理
等值电路、参数与频率的关系、转矩公式等变频调速时异步电机的控制方式
恒磁通控制(特点、问题、解决方案)恒电压 /频率控制(特点、问题、解决方案)恒功率控制(两种恒功控制的特点比较)
电力牵引中变频调速系统的调节特性谐波分析

43
《电力牵引交流传动控制系统》