Проектирование коробок скоростей металлорежущих станков. Методичка

Лекция 1.06 Сложное движение
3.1. Сложение скоростей и ускорений при сложном движении точки Общая постановка задачи о сложном движении точки такова: движение точки определяется наблюдателями, связанными с двумя различными координатными системами, причем эти системы движутся заданным образом относительно друг друга. Каждый наблюдатель определяет кинематические элементы движения: траекторию, скорость и ускорение точки в своей системе координат.
Требуется, зная движение одной системы отсчета по отношению к другой, найти связь между кинематическими элементами точки по отношению к каждой системе в отдельности. В зависимости от содержания стоящей задачи одну из этих систем ( )221 XXOXOXYZ принимают за основную и называют абсолютной, а движение по отношению к ней и все его кинематические элементы - абсолютными. Другую систему
называют относительной и соответственно движение по отношению к этой системе, а также его кинематические элементы – относительными. Термин "абсолютный" и "относительный" имеют здесь условное значение. Вводится также понятие переносного движения. Переносным движением точки называют движение (по отношению к абсолютной системе) того пункта (места) относительной системы, через который в рассматриваемый момент времени проходит движущаяся точка. Траекторные вопросы решает векторное равенство
( )221 xxOxOxyz
( ) ( ) ( ).ttt o rRR += (3.1.1) Ориентация осей относительной системы координат относительно абсолютной описывается матрицей поворота ( )tS , поэтому в проекциях на оси абсолютной и относительной систем координат имеем ., rRSRSSrRR o
TTo +=+= (3.1.2)
Продифференцируем векторное равенство (1). Правило дифференцирования
любого вектора ,×+′
= ωdtd
dtd
где -угловая скорость
системы координат, в которой задан дифференцируемый вектор, дает
ω
dtd
dtd o
o
rrωRRV′
+×+′
+×= 0 .
Два первых слагаемых определяют скорость того пункта относительной системы координат, где находится в рассматриваемый момент точка, то есть определяют переносную скорость rωVV ×+= oe . (3.13) Относительная производная радиус-вектора по времени определяет скорость
точки в относительной системе координат dtd
r
rV′
= . (3.1.4)

Итак, абсолютная скорость точки складывается из переносной и относительной скоростей re VVV += . (3.1.5) Дифференцирование по времени выражения для вектора абсолютной скорости дает
=⎟⎠⎞
⎜⎝⎛ ×+
′+⎟
⎠⎞
⎜⎝⎛ ×+
′×+×⎟
⎠⎞
⎜⎝⎛ ×+
′+⎟
⎠⎞
⎜⎝⎛ ×+
′= r
ro
o
dtd
dtd
dtd
dtd VωVrωrωrωωωVVW 0
( ) rr
o dtd
dtd VωVrωωrωW ×+
′+××+×
′+= 2 .
Три первых слагаемых в этом выражении определяют ускорение того места относительной системы координат, где находится точка. ( )rωωrεWW ××+×+= oe . (3.1.6) Относительная производная относительной скорости дает относительное
ускорение dt
d rr
VW′
= . (3.1.7)
Последнее слагаемое rcor VωW ×= 2 (3.1.8)
называется кориолисовым ускорением: поворот относительной скорости вместе с относительной системой координат rVω× и изменение переносной скорости
за счет изменения радиус-вектора в относительной системе rdtd rω′
× .
Итак, имеем corre WWWW ++= . (3.1.9) Абсолютное ускорение точки равно векторной сумме переносного ускорения, относительного ускорения и кориолисового ускорения. Этот результат составляет содержание теоремы Г.Кориолиса (1792-1843). Чтобы определить поле скоростей и ускорений в твердом теле, свяжем с телом декартову систему координат с началом в некоторой точке тела. Тогда движение твердого тела будет совпадать с движением введенной системы координат. Для любой точки твердого тела метод сложного движения дает, что ее скорость и ускорение равны соответственно переносной скорости и переносному ускорению. Все точки твердого тела покоятся относительно системы координат, жестко связанной с твердым телом, поэтому относительные скорость, ускорение и кориолисово ускорение равны нулю. Итак, движение твердого тела можно представить как движение некоторой точки твердого тела - полюса и вращение тела вокруг этого полюса ( )rωωrεWWrωV ××+×+=×+ oo , . По поводу векторов и , входящих в эти выражения, следует отметить, что они единственны и не зависят от выбора полюса. Независимость
и от выбора полюса следует из независимости от выбора полюса матрицы поворота, через компоненты которой они выражаются, а единственность следует из единственности решения выражений для скорости и ускорения произвольной точки тела относительно и либо из инвариантности дифференциальных операций
ω ε
ω ε
ω εdivrot, и независимости векторов от
выбора базиса системы координат. Векторы не зависят от координат текущей точки.
WV,oo WV ,

Векторы ( ) ( rεrω ×× , ) описывают циркуляцию поля скоростей и ускорений, поэтому ( ) ( ) ( ) ( ) .0,0,0,0 =×=×≠×≠× rεrωrεrω divdivrotrot Вектор описывает поле ускорений, направленное к оси мгновенной угловой скорости, центростремительное ускорение и
([ rωω ×× )]
( )[ ] ( )[ ] .0,0 ≠××=×× rωωrωω divrot Вычисления дают
( ) ( ) ( )( ) ( ) ( )
( )[ ] ( )[ ] .23,23
,23
2222 ωωωrωrωωrωωWεεεrεrεrεW
ωωωrωrωrωV
−=−=−⋅⋅∇=××⋅∇=
=−=∇⋅−⋅∇=××∇==−=∇⋅−⋅∇=××∇=
divrotrot
По поводу конечных перемещений твердого тела имеет место
утверждение, составляющее содержание теоремы М.Шаля (1793-1880). Самое общее перемещение твердого тела можно представить, как поступательное перемещение и конечный поворот вокруг полюса. Направление оси, проходящей через полюс, и угол поворота вокруг нее не зависят от выбора полюса, а направление и длина поступательного перемещения изменяются при переходе к другому полюсу. Доказательство теоремы основывается на векторном равенстве, справедливом для любой точки тела, omom rRR += , где - радиус-вектор произвольной точки тела, oR - радиус-вектор точки , принятой за полюс, - вектор, проведенный из точки o в точку . Если в качестве полюса взять какую-либо другую точку , будем иметь rr
mR mo
omr ma
., amaamoaomamoaom rRrrRRr +=++=+= Перемещение изменилось .oaoa rRR +=
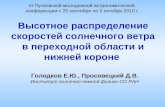
Пример. Найти скорость и ускорение любой точки обода колеса радиуса катящегося без скольжения по прямолинейному рельсу, если центр колеса имеет скорость и ускорение . Найти радиус кривизны траектории точки и построить годограф вектора скорости точки.
,a
oV oW
Принимая за полюс точку контакта обода колеса и рельса, имеем
aVo ω= , откуда aVo=ω . Центр колеса движется прямолинейно. В системе координат, движущейся поступательно, имеем неравномерное вращение колеса вокруг его центра
aWo==ωε . Для произвольной точки обода имеем
ϕϕω cos2cos2 oo Va
aVPMV =⋅=⋅=
.

Годограф вектора скорости есть окружность радиуса . oVСпроектируем равенство ( )rωωrεWW ××+×+= o на нормаль к
траектории ϕϕωϕεϕρν coscossinsin
202
2
aVaaWVW o =+−== .
Отсюда имеем .2cos22
PMaWV
=== ϕρν
3.2. Сложное движение твердого тела
Общая постановка задачи о сложном движении твердого тела такая же, как и для материальной точки: движение тела определяется наблюдателями, связанными с двумя различными координатными системами, причем эти системы движутся заданным образом относительно друг друга. Каждый наблюдатель определяет кинематические элементы движения: траекторию, скорость, ускорение полюса и ориентацию, угловую скорость, угловое ускорение тела в своей системе отсчета. Задача состоит в определении связи между кинематическими элементами движения твердого тела. По отношению к абсолютной системе отсчета твердое тело совершает сложное движение : по отношению к движущейся относительной и вместе с относительной системой координат. Кинематическими элементами движения относительной системы координат являются eeeooo εω ,,S,,, WVR - параметры переносного движения. Движение твердого тела относительно движущейся относительной системы определяются величинами rrrrcrcc εω ,,S,)(,)(, WVr - параметры относительного движения.
Метод сложного движения для произвольной точки твердого тела дает:
m
,, cmocomomo rrrrRR +=+=
( ) .,
,
cmrrcr
omeoe
re
rωVVωVV
VVVr
×+=×+=
+=
Для наблюдателя в абсолютной системе координат имеем
cmac rωVV ×+= , где ( )rcoceoc VrωVV +×+=
Итак, ( ) ( ) =×+++×+= cmrercoceo rωωVrωVV ( ) .cmrec rωωV ×++= Сравнивая эти два выражения для скорости точки , заключаем m rea ωωω += . (3.2.1)

Абсолютное угловое ускорение может быть получено дифференцированием вектора угловой скорости :
aεaω
,rereaere
rer
eeerea
a dtd
dtd
dtd
dtd
dtd
ωωωω
ωωωωωωωωω
εεεε
ε
×++=×++=
=×+′
+×+′
=+==
где dt
ddt
d rr
ee
ωω εε ′=
′= , . (3.2.2)
Таким образом, имеем rerea ωωεεε ×++= . (3.2.3)
При вращении твердого тела вокруг неподвижного центра просто решается вопрос о мгновенной оси вращения. Мгновенной осью вращения будет геометрическое место точек тела, имеющих в данный момент нулевую скорость. Положение оси в твердом теле определяется системой уравнений
zyx
zyxωωω
===×= ,,0 rωrωV , (3.2.4)
где система осей, жестко связанная с телом и с началом в неподвижном центре.
oxyz
Можно поставить вопрос об определении положения мгновенной оси вращения в неподвижной системе отсчета . Это положение определяется системой
уравнений
OXYZ
ZYX
ZYXΩ
=Ω
=Ω
. (3.2.5)
Геометрическое место мгновенных осей вращения в системе отсчета, жестко связанной с твердым телом и в неподвижной системе отсчета, называется соответственно подвижным и неподвижным аксоидом.
При движении вокруг неподвижной точки, называемым регулярной прецессией, тело вращается с постоянной угловой скоростью constr =ω вокруг некоторой своей оси, которая в свою очередь вращается с постоянной угловой скоростью вокруг фиксированного в пространстве направления, сохраняя с ним постоянный угол
conste =ωconst=θ . При вращении тела
вокруг неподвижного центра подвижный аксоид катится без скольжения по неподвижному аксоиду. Чтобы получить таблицу направляющих косинусов между осями, связанными с твердым телом и осями абсолютной системы отсчета, достаточно выразить орты
через : 321 ,, eee 321 ,, EEE ( ) ( ) ( ) sesrrsss Eie βαββαβα == .
Итак, имеем ( ) ( )esrs sss βαβα = (3.2.6)
Пример. Методом сложного движения точки найти правило сложения угловых ускорений твердого тела, совершающего сложное движение. Метод сложного движения для ускорения точки дает
m( ) ( )[ ]
( ) ( ).2,
cmrrcmrrcr
cmrrcecormeemeoe
rωωrεWWrωVωWrωωrεWW
××+×+=
×+×=××+×+=
Полагая , получим cmcm rrr +=

( ) ( ) (( ) ( ) ( ).2
2
cmrecmrrcmrcmeecme
rcercceeceocorre
rωωrωωrrωωrVωWrωωrWWWWW
εεε
××+××+×+××+×+
+× )++××+×+=++=
С позиции наблюдателя в абсолютной системе координат имеем ( )cmaacmac rωωrWW ε ××+×+= , где ( ) ( ) ( )rcercceeceoc VωWrωωrWW ε ×++××+×+= 2 и поскольку rea ωωω += имеем ( ) =×× cmaa rωω ( ) ( ) ( ) ( cmrrcmercmrecmee rωωrωωrωωrωω × )×+××+××+××= Итак,
( ) ( ) ( )
( ) ( ) ( ) ( .2
cmrrcmercmrecmee
cmarcercceeceo rrωωrωωrωωrωω
VωWrωωrWW εε××+××+××+××+
+
)×+×++××+×+=
Сравнивая выражения для ускорения произвольной точки , подсчитанные двумя способами, получаем
m
( ) ( )cmercmrecmrcmecma rωωrωωrεrεrε ××−××+×+×=× . Два последних слагаемых в этом выражении преобразуются к виду
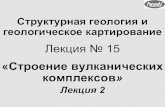
( ) ( ) ( ) ( ) ( ) cmrecmrecmercmercmre rωωrωωrωωrωωrωω ××=⋅⋅−⋅⋅=××−××. Таким образом, имеем rerea ωωεεε ×++= . Пример. Конус с углом при вершине градусов катится без скольжения по плоскости так, что скорость центра основания постоянна и равна
90V . Найти
скорость и ускорение точек A и B образующих, если длина образующей равна L .
Введем систему координат Oxyz , плоскость Oxy которой все время совпадает с неподвижной плоскостью, по которой происходит качение конуса, а плоскость Oyz содержит центр основания конуса. Угловая скорость этой системы координат будет LVe 23eω = . Из условия, что угловая скорость конуса равна
rea ωωω += и направлена по образующей, касающейся неподвижной
плоскости, получаем LVa 22eω −= .
Тогда ( 21 2 LVrea eωωε =×= ) и далее
, VOAaOA 21erωVV −=×+= 0=×+= OBaOB rωVV
( ) .4 2
3 LV
OBaaOBaOB erωωrWW ε =××+×+=
Ускорение точки контакта конуса с плоскостью направлено по нормали к плоскости. Этот факт не является случайным, поскольку качение происходит без скольжения, скорость точки контакта равна нулю. Через малый интервал времени t∆ скорость станет равной tBB ∆≈ WV и траектория точки, касающаяся вектора скорости, будет направлена по нормали к поверхности.

3.3. Теорема Шаля. Плоскопараллельное движение.
В общем случае перемещение твердого тела определяется теоремой Моцци: Произвольное перемещение твердого тела в пространстве эквивалентно винтовому движению. Для винтового движения перенос и вращение коммутативны. Доказательство теоремы Моцци состоит в разложении поступательного перемещения на два: одно , параллельное оси вращения, и
другое , перпендикулярное этой оси. Перенос и вращение представляют собой плоское движение, которое можно объединить в одно единственное вращение с новой осью, параллельной прежней оси. Взятые вместе это новое вращение и образуют винтовое движение.
||T
⊥T ⊥T
||TДля описания перемещения в плоскости удобно использовать
комплексные числа iyxr += . Перенос представим комплексным числом t , равносильным преобразованию trr +=′ . Вращение на угол θ вокруг точки означает преобразование
or( ) ( )θirrrr oo exp−=−′ . Если принять T и за
символы операции переноса и вращения, то для двух последовательных преобразований имеем
R
( ) ( )
( ) ( ).exp:,exp:
θθ
irrrtrTRirtrrrRT
oo
oo
−++=′−++=′
(3.3.1)
Это два различных преобразования, то есть перемещение и вращение - некоммутативные преобразования. Чтобы найти неподвижную точку, положим
rr =′ . Тогда
( ) ( )( ) ( )( ) ( )( ) .exp1:
,expexp1:tirrTR
itirrRT
o
o
=−−=−−
θθθ
Если 0≠θ , то каждое уравнение имеет единственное решение. Отсюда следует, что при каждом жестком плоском перемещении (исключая чистое поступательное перемещение) имеется одна единственная неподвижная точка. Эти точки различны. Рассмотрение бесконечно малых перемещений, при которых можно пренебречь всеми дифференциалами выше первого порядка, приводит к заключению, что бесконечно малые переносы и бесконечно малые вращения коммутативны. Полагая ( titet i ) ≅++= ...1 θθ , получаем
( ) ( ) ( ) ( ) ( )( ) ( ) ( ) .exp:
,expexp:tirrrrTR
tirrirtrrrRT
oo
ooo
+−=−′+−≅−+=−′
θθθ
(3.3.2)
Таким образом, всякое перемещение плоской фигуры в своей плоскости, а следовательно, и всякое плоскопараллельное перемещение твердого тела за бесконечно малое время можно представить как совокупность двух перемещений: поступательного перемещения, не зависящего от выбора полюса, и вращательного движения вокруг полюса, угол и направление поворота от выбора полюса не зависят ( ) ( ) YoXo txxytyyxx y +−=−′+−−=−′ θθ , . Вводя обозначения

θτωττττ =∆−′=∆−′=∆=∆=∆ ,,,, yyVxxVtVtV yXYOYXOX , получаем в векторном виде omom rωVV ×+= . (3.3.3)
Если вращение отсутствует, скорости всех точек тела равны скорости полюса - тело совершает мгновенно поступательное движение. Траектории конгруентные кривые. Движение определяется скоростью и ускорением одной точки. При всяком непоступательном движении плоской фигуры существует точка фигуры, скорость которой в данный момент равна нулю - мгновенный центр скоростей P . Скорости точек плоской фигуры при этом можно рассматривать как скорости, обусловленные вращением тела вокруг его мгновенного центра скоростей, а сам мгновенный центр скоростей как мгновенный центр вращения плоской фигуры. Это утверждение составляет содержание теоремы Эйлера. Всякое непоступательное перемещение плоской фигуры в ее плоскости может быть осуществлено одним поворотом вокруг некоторого центра.
Утверждение теоремы легко иллюстрируется. Так как скорость любой точки плоской фигуры при ее непоступательном движении обусловлена её вращением вокруг мгновенного центра скоростей, то центр скоростей находится на перпендикуляре к скорости точки
. Условие PMMPMM rVrωV ⊥×= , 0=PV дает уравнение для определения вектора :Pr 0=×+= PoP rωVV . (3.3.4) Умножим это уравнение на единичный вектор , перпендикулярный плоскости фигуры
e( ) ( ) ( ) 0=⋅−⋅+×=××+× ωerreωVerωeVe PPoPo . Так
как вектор находится в плоскости фигуры, а вектор перпендикулярен
плоскости фигуры, имеем
Pr ω
ωωo
oPo
P
VeRRVer ×+=
×= . (3.3.5)
Эти два выражения дают подвижную и неподвижную центроиды: геометрическое место мгновенных центров скоростей в подвижной, связанной с фигурой, и неподвижной системах координат соответственно. Для твердого тела проекции скоростей двух его точек на прямую, соединяющую эти точки, равны ( ) ( ) ,0=×⋅=−⋅ ABABABAB rωeVVe .AABAABBABBAB npnp VVeVeV =⋅=⋅= (3.3.6) Ускорение любой точки в плоскопараллельном движении может быть представлено как геометрическая сумма поступательного ускорения, равного ускорению полюса, вращательного ускорения вокруг полюса и центростремительного ускорения к полюсу . (3.3.7) Вращательное ускорение
( ) 2ωrrWrωωrWW εε −×+=××+×+= oo
rW ε ×=BP перпендикулярно центростремительному
. 2ωrW −=OC

Точку, ускорение которой в рассматриваемый момент равно нулю, называют мгновенным центром ускорений. Ускорение любой точки плоской фигуры по величине пропорционально ее расстоянию от мгновенного центра ускорений и направлено под одинаковым для всех точек углом
( )2tgα α ε ω= к радиус-вектору, проведенному
из мгновенного центра ускорений в рассматриваемую точку. Условие
дает уравнение для определения вектора , проведенного из произвольной
точки в мгновенный центр ускорений .
0=QW
OQr
Or Qr02 =
= −×+ ωOQOQOQ rrεWW . (3.3.8) Умножим векторно это уравнение на вектор углового ускорения, который так же, как и угловая скорость, перпендикулярен плоскости, в которой происходит движение ( ) =×−××+×=× 2ωOQOQOQ rrWW εεεεε
022 =×−−×= ωε OQOQO rrW εε .
Подставим в это равенство выражение для OQrε× из (8):
( ) 0242 =++−× OOQO WrWε ωωε .
Итак, 42
2
42
2
,ωεω
ωεω
++×
+=++×
= OOOQ
OOOQ
WWεRR
WWεr . (3.3.9)
При сложном плоскопараллельном движении твердого тела угловые скорости относительного и переносного движений коллинеарные, и для углового ускорения абсолютного движения имеем
rererea εεωωεεε +=×++= (3.3.10)
то-есть имеем сумму двух векторов направленных перпендикулярно плоскости фигуры. Имеется большой класс механизмов, именуемых эпициклическими или планетарными передачами, в которых тела вращаются вокруг параллельных осей. Поставим вопрос об
определении мгновенного центра скоростей какого-либо тела такого механизма. Для мгновенного центра скоростей имеем уравнение 0=×+×=+= PoereP rωRωVVV .
Умножение на единичный вектор, перпендикулярный плоскости движения, дает ( ) ( ) ( ) ( ) 0=⋅−⋅−=××+×× aPeoPaoe ωerωeRrωeRωe
или a
roPoP
a
eoP ω
ωωω RrRRRr =+=−= , . (3.3.11)
Выделим три частных случая сложного вращения твердого тела вокруг параллельных осей:

Два параллельных вектора, равных по величине и направленных в разные стороны, называют парой векторов. Моментом пары называют величину
( )
.ooeeo
ererreec
VRωωRωrrωrωrM
=×=×−==×−=×+×=
(3.3.12)
Момент пары угловых скоростей равен мгновенно поступательной скорости и не зависит от положения точки, относительно которой вычисляется момент.
Задачи определения скоростей и ускорений в эпициклических или планетарных передачах обычно решаются методом остановки, то есть переходят в систему координат , в которой относительные оси вращения тел неподвижны. Для этого механизму придается вращение с угловой скоростью Ω− , тогда ''рукоятка'' становится неподвижной, и ( ) ( ) jjii rr Ω−=Ω− ωω ∓ . (3.3.13) Знак минус берется при внешнем зацеплении колес и знак плюс при внутреннем зацеплении. 3.4. Приведение движения к простейшему виду. Центральная ось
Если тело участвует в нескольких поступательных и вращательных движениях, то возникает задача о приведении этой системы векторов к простейшему виду. Мгновенно поступательная скорость при этом трактуется как момент пары угловых скоростей.
Остановимся сначала на классификации векторов. Несвободным или приложенным вектором называется вектор, для которого недопустимо изменение точки приложения. Примером несвободного вектора может служить сила, приложенная к деформируемому телу, напряженность неоднородного поля и т.д.

Два равных вектора, моменты которых относительно любой точки пространства равны, называются эквивалентными. Векторы, которые определяются с точностью до эквивалентности, то есть, которые можно перемещать вдоль линии их действия, называются скользящими.
Примером скользящего вектора может служить вектор, изображающий угловую скорость твердого тела или вектор, изображающий силу, приложенную к твердому телу.
Если вектор можно переносить в пространстве параллельно самому себе, то такой вектор называется свободным. Под словами "можно переносить" понимается, что указанные действия не нарушают условий задачи или не изменяют рассматриваемого явления и его характеристик. Примером свободного вектора может служить скорость точек твердого тела при поступательном его движении. Вопрос о том, какие векторы являются свободными, скользящими или приложенными, в математике определяются условием задачи, а в приложениях - сущностью явления.
Две системы векторов считаются эквивалентными, если они вызывают одинаковое состояние некоторого объекта или одинаково характеризуют данное явление. Термины "одинаковое состояние", "одинаково характеризуют" не являются математически точными. Поэтому для системы скользящих векторов вводятся некоторые аксиомы. 1. Совокупность двух скользящих векторов эквивалентна нулю (нуль вектору) тогда и только тогда, когда они равны по величине, действуют по одной прямой, проходящей через произвольные токи их приложения, и направлены в противоположные стороны. 2. Если к данной системе векторов присоединить или отбросить систему, эквивалентную нулю, то в результате получится новая система, эквивалентная данной. 3. Любой вектор эквивалентен двум векторам, имеющим то же начало, для которых он равен сумме. Два вектора, имеющие общее начало, эквивалентны одному вектору, приложенному к той же точке и равному их сумме. Теорема. Система свободных векторов эквивалентна равнодействующему вектору, равному главному вектору системы. Например, при поступательном движении твердого тела все его точки имеют одинаковую скорость, т.е. скорость в поступательном движении есть свободный вектор. Если твердое тело участвует в поступательных движениях , то результирующее движение есть поступательное движение со скоростью
iV
∑= i iVVТеорема. С помощью элементарных операций (перенос вектора вдоль линии его действия - добавление или отбрасывание двух векторов, эквивалентных нуль вектору, замена нескольких векторов, приложенных в одной точке, их суммой, замена одного вектора его составляющими) любую систему скользящих векторов всегда можно привести к двум векторам.

Для доказательства этого утверждения преобразуют три произвольных вектора к двум векторам. Через точку приложения C вектора и векторы и проводятся соответственно две плоскости. На линии пересечения этих плоскостей выбирается произвольная точка . В каждой плоскости соответственно вектор раскладывается по двум направлениям
. Далее полученные компоненты сдвигаются по линии их действия в точки
C A B
D( )BA
( DBCBDACA ,, ) ( )2121 ,, BBAAC и . Итак, в точке имеем два
вектора и в точке D D
22 ,BA C - три вектора , которые заменяются соответственно суммами . Напомним определение момента.
CBA ,, 11
2 2 1 1,+ +A B A B C+
Моментом ( )Fm o вектора относительно какой-либо точки называется вектор, равный векторному произведению радиус-вектора , проведенного из точки в точку приложения вектора на сам вектор
Fo
r oF
( ) ( ) hFoo =×= FmFrFm , , где -плечо вектора . h F
Момент вектора не зависит от выбора точки приложения вектора на
линии его действия, то есть точку на этой прямой можно брать произвольно ZXYYZXXYZ MyFxFMxFzFMzFyF =−=−=− ,, . Эта система уравнений определяет прямую, то есть вектор и его момент относительно некоторой точки
F( )Fm o однозначно определяют линию действия
вектора. Два равных вектора, моменты которых относительно любой точки
пространства равны, называются эквивалентными. Векторы, определенные с точностью до эквивалентности, называются скользящими.

Вводятся понятия главного вектора и главного момента системы векторов:
1
nii=
= ∑R F , (3.4.1)
M (3.4.2) Точка называется точкой приведения. При изменении точки приведения главный момент выражается формулой
( )1 1
n no o i ii i= == =∑ ∑ i×m F r F .
aM
o
. (3.4.3) Главный момент системы векторов относительно нового полюса o равен сумме главного момента относительно старого полюса и момента главного вектора системы относительно нового полюса в предположении, что главный вектор
( )1
no a i i ai=
′= + × = × +∑M r r F r R
ao
R приложен в старом полюсе . aОтсюда получаем ряд свойств системы скользящих векторов. Главный момент системы векторов одинаков для всех точек прямой, параллельной главному вектору. Если главный вектор системы равен нулю, то главный момент не зависит от выбора полюса o a=M . Скалярное произведение главного момента системы векторов на главный вектор той же системы не зависит от выбора полюса
M
2//o a R M pR⋅ = ⋅ = ⋅ =R M R M . (3.4.4)
Проекции главного момента системы векторов относительно разных полюсов на прямую, соединяющую полюсы, равны e aoaooa MeM . (3.4.5) ⋅=⋅Инвариантами системы векторов являются главный вектор и скалярное произведение главного вектора и главного момента , oinv inv= ⋅ =R M R . Инвариантность здесь понимается как независимость от точки, в которой проводятся все геометрические построения, необходимые для определения главного вектора и главного момента.
MM
MM
M//
//
^
^
RR
-[r,R]
Для любой системы векторов с всегда существует прямая ,и притом единственная, в точках которой главный момент коллинеарен главному вектору. Эта прямая параллельна главному вектору, и главный момент относительно точек этой прямой минимален. Это минимальное значение главного момента равно проекции главного момента на направление главного вектора. . Прямая, относительно точек которой момент коллинеарен главному вектору, называется центральной осью.
0≠R
//M
o p= − × =M M r R R 2op R= ⋅M R , (3.4.6)
( ) ( ) ( )OX Z Y OY X Z OZ Y X
X Y Z
M yR zR M zR xR M xR yR− − − − − −
||M R( )
R R R= = . (3.4.7)
Для любой точки на центральной оси и ( )2 0o o R× = × − × × = × + − ⋅ =M R M R r R R M R r R r R ,

откуда ( ) RrRRrMRr λ+=⋅
+×= ao RR 22
1, (3.4.8)
где 2
( )Roa MRr ×= -минимальное расстояние от точки до центральной
оси,
о2RRr ⋅=λ - параметр.
Уравнение центральной оси можно также записать в виде
λ=−
=−
=−
Z
a
Y
a
X
a
Rzz
Ryy
Rxx
(3.4.9)
где
222222222 ,,ZYX
XYYXa
ZYX
ZXXZa
ZYX
YZZYa RRR
MRMRzRRRMRMRy
RRRMRMRx
++−
=++
−=
++−
=
Понятие центральной оси системы векторов дает возможность представить простую геометрическую картину распределения главных моментов в пространстве. Для всех точек, лежащих на поверхности круглого цилиндра, ось которого совпадает с центральной осью системы, модули главных моментов равны между собой, или, иначе говоря, геометрическое место точек, для которых главные моменты системы векторов имеют равные модули, есть поверхность круглого цилиндра, ось которого совпадает с центральной осью системы.
При исследовании системы скользящих векторов встречаемся с системой двух равных по величине, параллельных и противоположно направленных скользящих векторов, которые называют парой векторов
Расстояние между линиями действия векторов пары называются плечом пары,
плоскость, проходящая через линии действия векторов пары, называется плоскостью пары. Главный вектор пары векторов равен нулю, поэтому главный момент пары не зависит от выбора полюса, то есть одинаков для всех точек пространства. Итак, пару векторов можно переносить как угодно в плоскости ее действия; пару векторов можно переносить в любую плоскость, параллельную плоскости пары; величины векторов пары можно изменять обратно пропорционально плечу.
R
h
То обстоятельство, что момент пары векторов, определенный формулой ( ) ( ) FrrFrFrM ×−=−×+×= BABA , (3.4.11)

не зависит от выбора в пространстве полюса, свидетельствует о том, что момент пары есть вектор свободный. В связи с этим фактом отмечаем, что совокупность нескольких пар векторов эквивалентна одной паре, момент которой равен сумме моментов данных пар. Свойства пары векторов позволяет сформулировать теорему Л.Пуансо (1777-1859). Любую систему скользящих векторов всегда можно привести к одному скользящему вектору и одной паре, момент которой коллинеарен первому вектору.
Выше было показано, что любая система векторов может быть приведена к двум векторам. Выбирая начало системы отсчета в точке приложения одного из них, вычисляем главный вектор и главный момент, находим точку на центральной оси и проводим построения, аналогичные предыдущему. Снова получим два вектора, один из которых приложен к точке на центральной оси. Этот вектор раскладываем по двум направлениям: вдоль главного вектора и перпендикулярно главному вектору. Перпендикулярная компонента вместе с другим вектором образует искомую пару.
Простейшая совокупность векторов, к которой приводится произвольная система скользящих векторов, называется классом эквивалентности. Существует четыре класса эквивалентности: нуль вектор, вектор, пара векторов, три вектора, два из которых образуют пару, а линия действия третьего перпендикулярна плоскости пары. Критерием принадлежности к какому-либо классу являются значения oo MRMR ⋅,, .
R = 0 R ≠ 0 R = 0 R ≠ 0 M o = 0 M Mo o≠ =0, 0 M o ≠ 0 M o ≠ 0 R M⋅ =o 0 R M⋅ ≠o 0
Сформулированные выше аксиомы и факты позволяют доказать ряд теорем. Теорема. Для того чтобы система скользящих векторов была эквивалентна нулю, необходимо и достаточно, чтобы главный вектор системы и ее главный момент относительно произвольной точки пространства равнялись нулю. Теорема. Для того чтобы две системы скользящих векторов были эквивалентны, необходимо и достаточно, чтобы были равны их главный вектор и главный момент. Теорема. Если две системы скользящих векторов эквивалентны, то с помощью элементарных операций можно перейти от одной системы к другой.
Теория винтов имеет непосредственное применение в кинематике. Наиболее общий случай перемещения твердого тела в пространстве сводится к винтовому перемещению, которое характеризуется осью, модулем вектора и параметром. Если винтовое перемещение бесконечно малое, то, относя его к бесконечно малому промежутку времени, получим мгновенный винт скоростей, у которого вектором служит угловая скорость, а моментом - поступательная скорость тела. Мгновенный винт скоростей также называется кинематическим винтом. Скорость произвольной точки тела равна моменту кинематического винта относительно этой точки

( ) ( ) ( )rωVωRrMRMR ×+=×−= oo ,,, . (3.4.12) Компоненты винта в некоторой системе координат называются плюккеровыми координатами ( ) ( )321321 ,,,,,, MMMRRR=MR . Винты ( ) 6,...,1, ≤= niii mf линейно независимы, если нельзя подобрать
вещественных чисел так, чтобы имело место равенство
. В противном случае винты называются линейно
зависимыми. В трехмерном пространстве каждый бивектор-винт определяется шестью плюккеровыми координатами, и условие линейной зависимости эквивалентно шести скалярным уравнениям, поэтому семь и более винтов всегда зависимы. Если винты
n
0,...,2
11 ≠∑ =
n
i in aaa( ) 0,1 =∑ =
n
i ii mf( )ii mf ,
( )ii mf , 6,...,1 ≤= ni линейно независимы, то для того чтобы 6≤m винтов
были независимы, необходимо и достаточно, чтобы хоть один из определителей -го порядка матрицы
был отличен от нуля. При
( ) ( ) mka iin
i kikk ,...,1,,, 1 == ∑ =mfMF
mnimkaik ,...,1,...,1 == 6≤n можно построить
бесчисленное множество винтов ( ) ( ),,, 1 iin
i kia mfMF ∑ == которые по
отношению к сложению образуют −n членную группу. Независимые винты называются основными винтами группы, а числа
- координатами группы. За основные винты группы можно принять какие угодно независимых винтов, входящих в группу. Группа из шести винтов представляет такую систему, из которой линейной комбинацией с вещественными множителями можно получить любой винт. Тело, способное совершать перемещения вдоль n независимых винтов, обладает степенями свободы. Изучение геометрического распределения всех винтов, вдоль которых может перемещаться тело с степенями свободы, сводится к изучению распределения всех винтов, входящих в n-членную группу.
( )ii mf , 6,...,1 ≤= niniai ,...,1=
n
n
n
Альтернативным описанием винтового исчисления является дуальное. Пример При движении точки по винтовой линии htztaytax === ,sin,cos ωω сопровождающий трехгранник совершает два движения: поступательное, со скоростью zyx 321 eeeV ++= , и вращательное, с угловой скоростью .3ωeΩ = Найти ось винта. Действительно, скалярное произведение вектора и вектора отлично от нуля .
V Ω// .V = ⋅ =V Ω Ω h Выбор точки приведения позволяет обратить в нуль
компоненты линейной скорости, перпендикулярные вектору угловой скорости. Центральная ось коллинеарна вектору , и ее след на плоскости Ω Oxy (точка пересечения с плоскостью Oxy ) имеет координаты Относительно этой точки главный момент коллинеарен главному вектору
.0,, =ooo zyx
.000 ωωω −=
+=
− zxyyx oo
Так как xyyx ωω =−= , из этой системы уравнений получаем

., xxyy oo −=−= Таким образом, ось Oz системы отсчета является центральной осью. Скорость произвольной точки тела, связанного с естественным трехгранником, равна моменту кинематического винта относительно этой точки. В частности, скорость начала осей равна
βντ eee ,,
hxyo 321// eeeΩrVRrM ++−=×−=×− ωω . В дуальном описании это движение определяется винтом
( )3 3 3 3 3exp ,hh hω ε ω ε ωω
e e e e e⎛ ⎞⎟⎜= + = ⇒⎟⎜ ⎟⎟⎜⎝ ⎠
либо кватернионом 3cos sin sin cos2 2 2 2 2 2t ht t t ht tω ω ω
ε τ ε⎛ ⎞ ⎛ ⎞⎟ ⎟⎜ ⎜= − + −⎟ ⎟⎜ ⎜⎟ ⎟⎟ ⎟⎜ ⎜⎝ ⎠ ⎝ ⎠
ω .